

transporto priemonių dinamika - Vilniaus Gedimino technikos ...
transporto priemonių dinamika - Vilniaus Gedimino technikos ...
transporto priemonių dinamika - Vilniaus Gedimino technikos ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
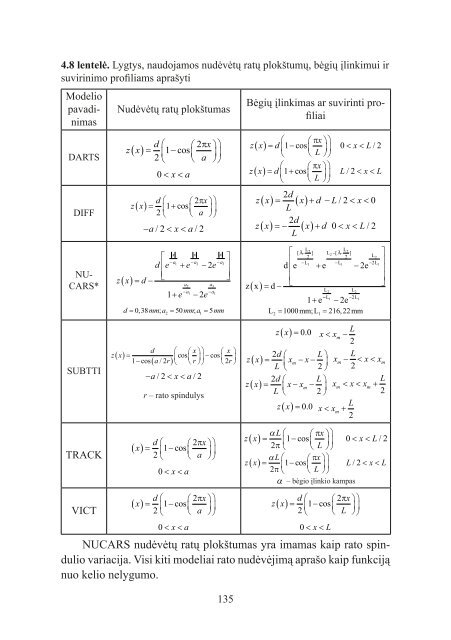
4.8 lentelė. Lygtys, naudojamos nudėvėtų ratų plokštumų, bėgių įlinkimui ir<br />
suvirinimo profiliams aprašyti<br />
Modelio<br />
pavadinimas<br />
DARTS<br />
DIFF<br />
Nudėvėtų ratų plokštumas<br />
d ⎛ ⎛ x⎞⎞<br />
z( x)= ⎜ − ⎜ ⎟⎟<br />
2 ⎝<br />
1 2π<br />
cos<br />
⎝ a ⎠⎠<br />
0 < x<<br />
a<br />
d ⎛ ⎛ x⎞⎞<br />
z( x)= ⎜ + ⎜ ⎟⎟<br />
2 ⎝<br />
1 2π<br />
cos<br />
⎝ a ⎠⎠<br />
− a/ 2< x<<br />
a / 2<br />
⎛ ⎛ πx<br />
⎞⎞<br />
z( x)= d ⎜1−cos ⎜ ⎟⎟ ⎝ ⎝ L ⎠⎠<br />
0< x<<br />
L/<br />
2<br />
⎛ ⎛ πx<br />
⎞⎞<br />
z( x)= d ⎜1+<br />
cos ⎜ ⎟⎟ ⎝ ⎝ L ⎠⎠<br />
L/<br />
2< x<<br />
L<br />
z x<br />
2 d<br />
L x d L / 2 x 0<br />
2 d<br />
L x d 0 x L / 2<br />
( )= ( )+ − < <<br />
( )=− ( )+ < <<br />
z x<br />
Bėgių įlinkimas ar suvirinti profiliai<br />
NU-<br />
CARS*<br />
SUBTTI<br />
z( x)= d −<br />
z x<br />
x x<br />
⎡<br />
a a<br />
d⎢e + e −2e<br />
⎣<br />
⎢<br />
− −<br />
x<br />
−a3<br />
1 2<br />
a2<br />
−a1<br />
1+ e −2e<br />
a3<br />
−a1<br />
d = 038 , mma ; = 50mm;<br />
a = 5mm<br />
2 1<br />
⎤<br />
⎥<br />
⎦<br />
⎥<br />
d ⎛ x ⎞⎞<br />
x<br />
⎜ ⎜ ⎟⎟ a r ⎝ ⎝ r ⎠⎠<br />
− ⎛ ⎞<br />
cos cos⎜<br />
⎟<br />
1 cos / 2 ⎝ 2r<br />
⎠<br />
( )= − ( )<br />
⎛<br />
− a/ 2< x<<br />
a / 2<br />
r – rato spindulys<br />
Ä L 2 L Ä L 2<br />
⎡ [ − ] 2 −[ − ]<br />
2 2<br />
⎢ −L1<br />
−L1<br />
d⎢e + e −2e<br />
⎢<br />
z( x)= d −<br />
⎣<br />
L2<br />
L2<br />
−L1<br />
− L1<br />
1+<br />
e − 2e<br />
2<br />
L = 1000 mmL ; = 216,<br />
22mm<br />
2 1<br />
z( x)= 00 .<br />
L x < x<br />
m<br />
− 2<br />
L2<br />
−2L1<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
2d<br />
⎛<br />
z x<br />
L x x L ⎞ L<br />
( )= ⎜ m<br />
− − ⎟ xm<br />
− < x < x<br />
m<br />
⎝ 2 ⎠ 2 <br />
2d<br />
⎛<br />
z x<br />
L x x L ⎞<br />
L<br />
( )= ⎜ −<br />
m<br />
− ⎟ xm<br />
< x< xm<br />
+<br />
⎝ 2 ⎠<br />
2<br />
z( x)= 00 .<br />
L x < x<br />
m<br />
+ 2<br />
TRACK<br />
VICT<br />
d ⎛ ⎛ x⎞⎞<br />
( x)= ⎜ − ⎜ ⎟⎟<br />
2 ⎝<br />
1 2π<br />
cos<br />
⎝ a ⎠⎠<br />
0 < x<<br />
a<br />
d ⎛ ⎛ x⎞⎞<br />
( x)= ⎜ − ⎜ ⎟⎟<br />
2 ⎝<br />
1 2π<br />
cos<br />
⎝ a ⎠⎠<br />
0 < x<<br />
a<br />
135<br />
α L⎛<br />
⎛ πx⎞⎞<br />
z( x)= ⎜1−cos ⎜ ⎟⎟ 2π<br />
⎝ ⎝ L ⎠⎠<br />
0< x<<br />
L/<br />
2<br />
α L⎛<br />
⎛ πx⎞⎞<br />
z( x)= ⎜1−cos ⎜ ⎟⎟ 2π<br />
⎝ ⎝ L ⎠⎠<br />
L/<br />
2< x<<br />
L<br />
α – bėgio įlinkio kampas<br />
d ⎛ ⎛ x⎞⎞<br />
z( x)= ⎜ − ⎜ ⎟⎟<br />
2 ⎝<br />
1 2π<br />
cos<br />
⎝ L ⎠⎠<br />
0 < x<<br />
L<br />
NUCARS nudėvėtų ratų plokštumas yra imamas kaip rato spindulio<br />
variacija. Visi kiti modeliai rato nudėvėjimą aprašo kaip funkciją<br />
nuo kelio nelygumo.














