Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
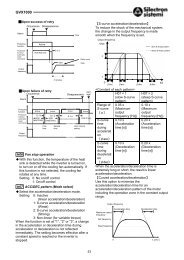
FUNZIONAMENTO E DESCRIZIONE DELLE FUNZIONI DELPANNELLO DI COMANDOPannello di comandoLED monitor•In modalità di funzionamento:visualizza i valori di riferimentofrequenza, corrente di uscita, tensione,velocità motore o della linea.•In condizione di allarme:visualizza un codice indicantel’allarme.Tasto PRG/RESETConsente di passare dalla modalitàfunzionamento a quella diprogrammazione.• In modalità allarme:resetta la condizione di allarme.Tasto FUNC/DATAIn modalità di funzionamento consentedi modificare i valori visualizzatisul display a LED. In modalità diprogrammazione consente di sceglierefunzioni o memorizzare dati.Tasti UP/DOWN•In modalità di funzionamento:consentono di aumentare o diminuirei valori della freq. (velocità motore).• In modalità di programmazione:consentono di scegliere la funzione daprogrammare e di cambiarne il valore.PRGRESETFUNCDATAIndicazioni sul comando difunzionamentoRUN :Quando é acceso indica che l’inverteré in funzionePANEL CONTROL :Si accende quando é inpostato ilmodo funzionamento da pannello dicomando = , o.RUNPRG. MODEHz Ar/minPANELCONTROLm/minVRUNIndi<strong>cat</strong>ore di unità di misuraVisualizza l’unità di misurarelativa ai valori visualizzati suldisplay a LED.Tasto StopPremendo tale tasto l’inverter si arresta(modo STOP) se è stato selezionatoil funzionamento da pannellodi controllo, questo tasto nonfunziona quando = .Tasto RunPremendo tale tasto l’inverter vienemesso in funz. provocando la marciamotore (modo funzionamento oRUN), questo tasto non funzionaquando =(comando esterno).Funzionamento del pannello di comando1 Una volta alimentato l’inverter con la tensione appropriata, premendo i tasti e si può regolare la frequenzadi uscita. Premendo il tasto RUN il motore comincia a ruotare in base al valore di frequenza precedentementeimpostato. Premendo il tasto , l'inverter decelera e si arresta.2 Procedura per la selezione e modifica della programmazione dell’inverter:PRG1) Premere il tasto RESET per selezionare la modalità di programmazione;2) Selezionare, con i tasti e la funzione da modificare ( ➨ ➨ ➨ ➨ • • • • •);FUNC3) Premere il tasto DATA per visualizzare il dato contenuto nella funzione scelta( ➨ ➨ ➨ ➨ • • • • •);4) Per modificare il dato visualizzato, funzione o dato contenuto nella funzione, premere i tasti e ;FUNC5) Premere il tasto DATA per memorizzare il dato cambiato.<strong>GVX1000</strong>15
5 modalità del pannello comandoMonitor, tastiModalitàIn modalità programmazione(arresto)Modalità programmazione(in funzionamento)Modo stopModo funzionamentoModo allarmiMostra codici e dati funzione(lampeggiante).Mostra codici e datifunzione (illuminato).Mostra il rifer. frequenza,corrente d'uscita tensione, velocità motore, dilinea (lampeggiante).Mostra il rifer. frequenza,corrente d'uscitatensione, velocità motore,di linea (illuminato).Mostra il dato allarme olo storico allarmi (lampeggianteo illuminato).Tasti MonitorPRGMODEHz Ar/min m/minV LampeggiantePANELLO DICONTROLLORUNPRGRESETFUNCDATARUNIndica la modalità programmazionein stop.PRGMODEHz Ar/min m/minIndica l'arresto del funzionamento( RUN spento).Passa modalità stop.Indica la modalità programmazionedurante ilUnita di misura del valoreindi<strong>cat</strong>o sopra.funzionamento.Indica selezione funzionamento da pannello di comandi o da segnale esterno(ON durante il funzionamento da pannello comandi).Acceso durante il funzionamento( RUN acceso).Passa alla modalitàfunzionamento.Alterna la visualizzazione del display tra codicifunzioni e dati di programmazione.Aumenta/diminuisce ilcodice funzione e i datidi programmazione.Non validoNon validoV LampeggiantePRGMODEHz Ar/min m/minAumenta/diminuisce idati di programmazionememorizzandolitemporaneamente.VNon validoLampeggiantePassa al modo stop oalla modalitàprogrammazione coninverter fermo.PRG MODEFreq. Hz A Vr/min m/minPRG MODECorrente Hz A Vr/min m/minPRG MODETensione Hz A Vr/min m/minPRG MODEVelocitàmotoreHz A Vr/min m/minPRG MODEVelocitàlineaHz A Vr/min m/minIndica l'arresto del funzionamento( RUN spento).Passa alla modalitàprogrammazione.Passa alla modalitàprogrammazione infunzionamento.Cambia la grandezza visualizzata sul display aLED e la relativa unità di misura.Aumenta e diminuisce il riferimento frequenza,velocità motore e velocità linea.Passa alla modalitàfunzionamento.Non validoUnita di misura del valoreindi<strong>cat</strong>o sopra.PRG MODEFreq. Hz A Vr/min m/minPRG MODECorrente Hz A Vr/min m/minPRG MODETensione Hz A Vr/min m/minPRG MODEVelocitàmotoreHz A Vr/min m/minPRG MODEVelocitàlineaHz A Vr/min m/minAcceso durante il funzionamento( RUN acceso).Non validoPassa al modo stopNullaNon illuminatoIndica l'arresto in modalitàallarmi( RUN acceso).Resetta l'allarme e passaalla modalità funzionamentoo arresto.Non validoMostra lo storicoallarmi.Non validoNon validoProcedura di selezione codici funzione e dati di programmazione(Es. Cambio dato da ad nella funzione codice ).Per selezionare altri codici funzione, ripetere l'operazionePRGRESETFUNCDATAFUNCDATACambio grandezza visualizzatasul display erelativa unità di misuraFUNCDATACambio riferimento frequenza(regolazione da pannello dicomando)PRGRESET16
Funzioni fondamentaliIMPOSTAZIONE FUNZIONILe funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Funzioni baseCod.FunzioneNomeProtezione parametriRiferimento frequenza 1Comando funzionamentoFrequenza massima 1Frequenza base 1Tensione nominale 1(alla frequenza base 1)Tensione massima 1(alla frequenza massima 1)Tempo di accelerazione 1Tempo di decelerazione 1Boost di coppia 1Relè elettronico termico disovraccaricoper motore 1 (modalità)(livello)(costante di tempo termica)Protezione elettronicadi sovraccarico(per resistenza di frenatura)Riavvio dopo momentaneamancanza di alimentazione(modalità)Limite di freq. (superiore)(inferiore)Guadagno segnale analogicoriferimento frequenzaSoglia di frequenzaFrenatura CC (freq. inserzione)(intensità)(durata)Freq. di avvio (valore)(tempo di mantenimento)Frequenza di arresto0 : Modifica dati possibile1 : Modifica dati impossibile0 : Da pannello di comando : (tasto e )1 : Ingresso tensione (morsetto 12) (da 0 a 10 VCC, 0 +5VCC)2 : Ingresso corrente (morsetto C1) (da 4 a 20 mA CC)3 : Somma ingressi corrente e tensione (morsetto 12 e C1)4 : Inversione di velocità con polarità morsetto 12 (da 0 a 10 VCC)5 : Impostazione riferimento inverso in tensione (morsetto 12) (da +10 a 0 VCC)6 : Impostazione riferimento inverso in corrente (morsetto C1) (da 20 a 4 mACC)7 : Metodo di controllo UP/DOWN 1 (frequenza iniziale 0 Hz)8 : Metodo di controllo UP/DOWN 2 (frequenza iniziale = ultimo riferimento)0 : Tastiera (direzione di rotazione determinata in morsettiera)1 : Segnale esterno (ingresso digitale FWD o REV)2 : Tastiera (marcia motore avanti)3 : Tastiera (marcia motore indietro)da 50 a 400 Hzda 25 a 400 Hz0 V: Tensione corrispondente a quella di alimentazione.da 80 a 240V (serie 200V)da 160 a 480V (serie 400V)da 80 a 240V (serie 200V)da 160 a 480V (serie 400V)da 0.01 a 3600 sda 0.01 a 3600 s0 : Boost di coppia automatico1 : Manuale, con caratteristica di coppia quadratica2 : Manuale, con caratteristica di coppia lineareda 3 a 31: manuale con caratteristica di coppia costante0 : Disattivato1 : Attivato (per motori autoventilati)2 : Attivato (per motori servoventilati)da 20 a 135% della corrente nominaleda 0.5 a 10.0 min.0 : Inattivo1 : Attivo per resistenza esterna2 : Attivo per resistenza esterna per cicli gravosi0 : Inattivo (l'inverter si arresta con allarme alla mancanza rete).1 : Inattivo (l'inverter si arresta con allarme al ritorno alimentazione).2 : Attivo (arresto momentaneo e ripartenza alla freq. di uscita precedente al guasto)3 : Attivo (arresto momentaneo e ripartenza alla frequenza di avvio).da 0 a 400 Hzda 0.0 a 200.0%da -400 a +400Hzda 0.0 a 60.0Hzda 0 a 100%0.0 s (Inattivo) da 0.1 a 30.0sda 0.1 a 60.0Hzda 0.0 a 10.0sda 0.1 a 6.0HzImpostazioneUnitàminima---1Hz1Hz1V1V0.0.1s0.0.1s1-0.01A0.1min--1Hz1Hz0,1%1Hz0.1Hz1%0.1s0.1Hz0.1s0.1HzSet difabrica00250502304002304006.006.0001*1)5.000700100.000.000.00.50.00.2<strong>GVX1000</strong>17
Funzioni fondamentali (seguito)Le funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Funzioni baseCod.FunzioneNomeFrequenza portante(tonalità motore)FMA, FMPFunz. FM(selezione)(tensione di uscita)(scelta funzione)Funzione FM(frequenza impulsi in uscita)(regolazione della tensione)(scelta funzione)Tipo di funzionamento reléallarmi 30A-30B-30CLimite di coppia 1(trasmissione)(frenatura)Parametri controllo vettoriale dicoppia motore 1da 0.75 a 15kHzda 0 a 30: Uscita analogica (FMA)1: Uscita ad impulsi (FMP)da 0 a 200%0: Frequenza di uscita 1 (prima della compensazione di scorrimento)1: Frequenza di uscita 2 (dopo la compensazione di scorrimento)2: Corrente d'uscita3: Tensione d'uscita4: Coppia d'uscita5: Fattore di carico6: Potenza d'ingresso7: Valore feedback PID8: Tensione circuito DCda 300 a 6000p/s (impulsi al 100%)0%, da 1 a 200%da 0 a 8 (vedi grandezze di F31)0: Eccitazione con allarme1: Eccitazione senza anomaliada 20 a 200%, (999: inattivo)0%: Controllo automatico decelerazioneda 20 a 200% (999: inattivo)0: Inattivo1: AttivoImpostazioneUnità Set diminima fabrica1kHz--1%-1p/s1%<strong>11</strong>1%1%-1500100014400001801500NOTE:*1) Valore tipico motore a 4 poli standard.Funzioni estese morsettiLe funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Morsetti X1-X5ACC 2DEC 2Cod.FunzioneNomeFunzione morsetto X1Funzione morsetto X2Funzione morsetto X3Funzione morsetto X4Funzione morsetto X50: [SS1]1: [SS2] Selezione frequenza2: [SS4] multilivello (16 velocità)3: [SS8]4: Selezione seconda rampa diaccelerazione/decelerazione [RT1]5: comando funzionam. a 3-fili [HLD]6: Arresto impulsi in uscita [BX]7: Reset allarmi [RST]8: Ingresso allarme esterno [THR]9: Cambio riferimento freq. 2/1 [Hz2/Hz1]10: Motor 2/ Motor 1 [M2/M1]Tempo di accelerazione 2da 0.01 a 3600s.Tempo di decelerazione 2Limite di coppia 2 (trasmissione) da 20 a 200%, (999: inattivo).0%: Controllo decelerazione automatica,(frenatura)da 20 a 200%, (999: inattivo).Impostazione<strong>11</strong>: Comando frenatura DC [DCBRK]12: Limite di coppia 2 /Limite di coppia 1[TL2/TL1]13: Comando UP [UP]14: Comando DOWN [DOWN]15: Abilitazione scrittura da pannellodi comando KEYPAD[WE-KP]16: Disabilitazione controllo PID [Hz/PID]17: Rif. freq. inverso Complemento allafreq. massima del segnale analogicod'ingresso (morsetto 12 e C1) [IVS]18: Abilitazione collegamento seriale [LE]Unitàminima10.01s0.01s1%1%Set difabrica0126710.010.018015018
Funzioni estese morsetti (seguito)Le funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.MorsettoY1, Y2Display aLEDFunzioneCod.NomeFunzione morsetto Y1Funzione morsetto Y2Ritardo segnale livellofrequenza raggiunto FDTFAR - Riferimento frequenzaraggiunto(isteresi)FDT - Raggiungimento livellodi frequenza(isteresi)Allarme sovraccarico OL(modalità intervento)(livello)(timer)Coefficiente display ACoefficiente display BFiltro display a LED0: Inverter in marcia [RUN]1: Riferimento frequenza raggiunto [FAR]2: Livello frequenza raggiunto [FDT]3: Raggiunto livello sottotensione [LV]4: Polarità della coppia [B/D]da 0.01 a 10.0sda 0.0 a 10.0Hzda 0 a 400HzImpostazioneda 0.0 a 30.0Hz0: Relè elettronico termico di sovraccarico1: Livello corrente d'uscitada 20 a 200% della corrente nominale inverterda 0.0 a 60.0sda 0.00 a 200.0da 0.00 a 200.0da 0.0 a 5.0s5: Limitazione di coppia [TL]6: Riavvio automatico [IPF]7: Preallarme sovraccarico [OL]8: Durata inverter [LIFE]9: Riferimento frequenza raggiunto 2 [FAR2]Unitàminima10.01s0.1Hz1Hz0.1Hz10.01A0.1s0.010.010.1sSet difabrica070.12.5501.00*<strong>11</strong>0.00.010.000.5Funzioni di controllo della frequenzaSaltifrequenzaLivelli frequenzaTimerLe funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Cod.FunzioneNome(salto frequenza 1)Salto (salto frequenza 2)freq. (salto frequenza 3)(Isteresi salto frequenza)Livelli di freq. (Freq. 1)(Freq. 2)(Freq. 3)(Freq. 4)(Freq. 5)(Freq. 6)(Freq. 7)(Freq. 8)(Freq. 9)(Freq. 10)(Freq. <strong>11</strong>)(Freq. 12)(Freq. 13)(Freq. 14)(Freq. 15)Funzionamento con timerTempo timerRiferimento frequenza 2Soglia segnale (morsetto 12)analogico (morsetto C1)Filtro riferimento analogicoda 0 a 400Hzda 0 a 30Hzda 0.00 a 400.0Hz0 : Inattivo1 : Attivoda 0.00 a 3600sda 0 a 8 (vedi F01)da –5.0 a +5.0%.da –5.0 a +5.0%.da 0.00 a +5.00s.ImpostazioneUnitàminima1Hz1Hz0.01Hz<strong>GVX1000</strong>-0.01s-0.1%0.1%0.01sSet difabrica030.0000.0020.00.00.0519
Parametri del motoreLe funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Motore 1Cod.FunzioneNomeNumero poli motore 1Potenza motore 1(corrente nominale)(tuning)(tuning in linea)(corrente a vuoto)(impostazione %R1)(impostazione %X)(Compensaz. scorrimento 1)(tempo di risposta)Impostazioneda 2 a 14.da 0.01 a 5.5kW (fino al 4.0kW).da 0.01 a <strong>11</strong>.00kW (5.5/7.5kW).da 0.00 a 99.9A.0: Inattivo.1: Attivo (determinazione di %R1, %X a motore fermo).2: Attivo (determinazione di %R1, %X, Io con motore in rotazione).0: Inattivo.1: Attivo.da 0.00 a 99.9A.da 0.00 a 50.00%.da 0.00 a 50.00%.da 0.00 a + 15.00Hz.da 0.01 a 10.00s.Unità Set diminima fabrica20.01kW0.01A<strong>11</strong>0.01A0.01%0.01%0.01Hz0.01s4*1)*1)00*1)*1)*1)0.000.5NOTE:*1) Corrente motore 4 poli standard.Funzioni ad alte prestazioniFunzioni avanzateLe funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Cod.FunzioneNomeTempo totale di funzionamentoStorico allarmiRipristino set di fabbricaReset automatico (tentativi)(intervallo di reset)Gestione avanzata dellaventilazioneCaratteristica della rampa diACC/DEC (selezione del tipo)Modalità diripresa al voloFunzione di risparmioenergeticoImpostazioneSolo monitoraggio.Solo monitoraggio.0 : Conserva le impostazioni effettuate.0 : Inattivo, da 1 a 10 tentativi.da 2 a 20s.0 : Inattivo.1 : Attivo (arresto ventilazione con bassa temperatura oltre 1.5 kW).0 : Acceleraz./deceleraz. lineare.1 : Acceleraz./deceleraz. curva ad S debole.0 : Inattivo.1 : Ritorno alle impostazioni di fabbrica.2 : Acceleraz./deceleraz. curva ad S forte3 : Non lineare.1 : Attivo (solo con riavvio dopo interruzione dell'alimentazione).2 : Attivo (per tutte le modalità di riavvio).1 : Attivo (solo con boost di coppia F09 a0 : Inattivo.regolazione manuale).Unità Set diminima fabrica1h--<strong>11</strong>s----0-0050010Modalità di arrestoLimitazione sovracorrentiistantaneeRiavvio automatico(tempo di riavvio)(riduzione della frequenzadi uscita)0 : Normale (secondo la funzione H07).1 : Per inerzia.0 : Inattivo.1 : Attivo.da 0.1 a 5.0s.da 0.00 a 100.0 Hz/s.--0.1s0.01Hz/s010.<strong>11</strong>0.0020
Funzioni ad alte prestazioni (seguito)ControlloPIDCollegamento serialeDiagnosticaLe funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Cod.FunzioneNomeControllo PID(selezione modalità)(segnale di retroazione)P (guadagno proporzionale)I (guadagno integrale)D (guadagno differenziale)(filtro del segnale di retroaz.)Termistore PTC (selez. modo)(livello)Cedevolezza caratteristicacoppia/ velocitàCollegamento seriale RS485(selezione della funzione)(indirizzo)(Comportamento conerrore di trasmissione)(timer)(baud rate)(lunghezza dato)(bit di parità)(bit di stop)(tempo di rilevamento erroreassenza risposta)(intervallo di risposta)Temperatura massimadissipatoreCorrente massimaVita condensatoriTempo funzionamento ventoledi raffreddamentoVersione software inverterVersione software tastierinoVersione software opzione0: Inattivo.1 : Regolazione diretta (uscita PID da 0 a 100% / frequenza da 0 a Fmax).2 : Regolazione inversa (uscita PID da 0 a 100% / frequenza da Fmax a 0).0 : Ingresso morsetto 12 (da 0 a +10 VCC).1 : Ingresso morsetto C1 (da 4 a 20 mA).da 0.01 a 10.00 (1 a 1000%).0.0 : Inattivo da 0.1 a 3600s0.00 : Inattivo da 0.01 a 10.0sda 0.0 a 60.0s.0 : Inattivo. 1 : Attivo.da 0.00 a 5.00V.da -9.9 a 0.0Hz.(Cod.) (Monitor) (Regolazione frequenza) (Marcia e arresto)0 : X - - X : Valid1 : X X - - : Invalid2 : X - X3 : XX Xda 1 a 310 : Er8 immediato.1 : Er8 dopo intervallo regolato dal timer.2 : Ritrasmissione nell'intervallo impostato in timer (Er8 dopo altro errore).3 : Continuazione delle operazioni.da 0.0 a 60.0s.0 : 19200[bit/s].1 : 9600.0 : 8bit.0 : None.0 : 1 bit.0 : Non rilevato.da 1 a 60s.da 0.00 a 1.00s.Solo monitoraggio.Impostazione2 : Ingresso morset. 12 (da +10 a 0 VCC).3 : Ingresso morsetto C1 (da 20 a 4 mA).2 : 4800. 4 : 1200.3 : 2400.1 : 7 bit.1 : Pari. 2 : Dispari.1 : 2 bit.Unità Set diminima fabrica--0.010.1s0.01s0.1s10.01V0.1Hz-1-0.1s----1s0.01s°CA0.1%10h---010.100.00.000.501.600.00102.0100000.01-------<strong>GVX1000</strong>21
Parametri motore alternativoMotore 2Le funzioni nei rettangoli gialli possono essere cambiate con l'inverter in marcia. Le altre funzioni devono essere cambiate con l'inverter in stop.Cod.FunzioneNomeFreq. massima motore 2Frequenza base motore 2Tensione nominale motore 2(alla frequenza base 2)Tensione massima motore 2(alla frequenza massima 2)Boost di coppia motore 2Protezione elettronica sovraccaricotermico motore 2(impostazione)(livello di corrente)(costante di tempo termica)Parametri controllo vettorialedi coppia motore 2Numero poli motore 2Motore 2 (potenza in kW)(corrente nominale)(tuning)(tuning in linea)(corrente a vuoto)(impostazione %R1)(impostazione %X)(compensazione delloscorrimento 2)(tempo di risposta 2)da 50 a 400Hz.da 25 a 400Hz.0V, 80 a 240V (200V class).0V,160 a 480V (400V class).da 80 a 240V (200V class).da 160 a 480V (400V class).0: Boost di coppia automatico.1: Manuale, con caratteristica di coppia quadratica.2: Manuale, con caratteristica di coppia lineare.da 3 a 31: manuale con caratteristica di coppia costante.0: Inattivo.1: Attivo (per motori autoventilati).2: Attivo (per motori con servoventilati).da 20 a 135% della corrente nominale inverter.da 0.5 a 10 min.0: Inattivo.1: Attivo.da 2 a 14.da 0.01 a 5.5kW (fino a 4.0kW). da 0.01 a <strong>11</strong>.00kW (5.5/7.5kW).da 0.00 a 99.9A.0: Inattivo.1: Attivo (%R1, %X).2: Attivo (%R1, %X, Io).0: Inattivo.1: Attivo.da 0.00 a 99.9A.da 0.00 a 50.00%.da 0.00 a 50.00%.da 0.00 a 15.00Hz.da 0.01 a 10.00s.ImpostazioneUnitàminima1Hz1Hz1V1V--0.01A0.1min-20.01kW0.01A--0.01A0.01%0.01%0.01Hz0.1sSet difabrica505040023040023001*1)5.004*1)*1)0019*1)*1)*1)0.000.5NOTE:*1) Valore tipico motore a 4 poli standard.22
AllarmeProtezione dasovracorrenteProtezione dasovratensioneDisturbi sulla lineadi alimentazioneProtezione dasottotensioneMancanza di faseingressoProtezione dasurriscaldamentoRelè elettronico disovraccarico termico(protezione motore)Protezione antistallo (sovracorrenteistantanea)Ingressso allarmeesternoUscita allarmi(con ogni allarme)Comando di resetStorico allarmiErrore di memoriaErrore pannellocomandiErrore CPUErrore opzioneErrore opzioneMancanza fase inuscitaErrore RS485FUNZIONI DI PROTEZIONEDescrizione• La funzione di protezione da sovracorrente viene attivata se il livello dellacorrente di uscita dell’inverter supera temporaneamente il livello di correntemassima ammissibile, o per un corto circuito o un guasto di terra nel circuitodi uscita.• Se la tensione del circuito CC supera il livello di intervento (serie da 400 V:800 VCC; serie da 200 V: 400 VCC) a causa della rigeneraz. del motore pereffetto del carico, l’uscita viene interrotta ed emesso l’allarme OU. Tuttavia, èpossibile che la funz. di protezione non venga attivata in caso di applicazioneinavvertita di tensione elevata all’ingresso (es. sovratensione di linea).• Protegge l'inverter contro i disturbi di natura impulsiva presenti sulla linea dialimentazione o fra alimentazione e terra.• Se la tensione CC del circuito di potenza scende al di sotto del livello diintervento a causa di un calo dell’alimentazione, l’uscita viene interrotta.• L'inverter è protetto contro la mancanza fase in ingresso.• Se la temperatura del dissipatore di calore aumenta a causa di un guastodella ventola di raffreddamento, o della temperatura ambiente o altro, vieneattivata la funzione di protezione.• Se viene selezionata la funzione di protezione elettronica di sovraccaricotermico per la resistenza di frenatura (F13), verrà prodotto questo allarmeonde evitare danneggiamenti alla stessa.• Se la corrente di uscita, supera il livello consentito, viene attivata la funzionedi protezione dei dispositivi del circuito di potenza.• Questa funz. di protezione viene attivata qualora la corrente erogata al motore,in virtù del livello di corrente e della modalità di intervento impostati, possaessere causa di surriscaldamento termico per il motore, sempre che sia statoselezionata la funz. F10 di protezione elettronica di sovraccarico termico 1.• Quando la corrente di uscita supera il limite consentito in accelerazione, questafunzione abbassa la frequenza di uscita per evitare l’intervento dell’allarme OC1.• Se si apre il contatto dell’eventuale dispositivo esterno di frenatura (oresistenza di frenatura) causa sovraccarico termico, se questo vienecollegato al morsetto di controllo (THR), viene attivato l’allarme OH2sull’inverter. Tale allarme ricorre anche quando interviene, se attivata, laprotezione termica tramite sonda termica PTC.• L'inverter eccita un contatto di relè in conseguenza di attivazione dellafunzione di protezione e conseguente arresto.• Un stato di allarme può venire superato con un comando di reset da tastierao da comando esterno (RST).• Mantiene in memoria le ultime 4 cause di allarme.• Se si verifica un errore di memoria, quale un dato mancante o errato, vieneattivata la funzione di protezione.• Se viene rilevato un errore o un’interruzione della trasmissione tra il pannellodi comando e il circuito di comando, viene attivata la funzione di protezione.• Se si verifica un errore sulla CPU inverter a causa di rumore elettrico, se ilmorsetto P24 viene sovraccari<strong>cat</strong>o, disturbi etc. viene attivato l'allarme Er3.• Errore di comunicazione seriale o con utilizzo di schede opzionali.• Se viene rilevato un errore di connessione con l’opzione o nell’opzionestessa, l’inverter emette un allarme.• Questo allarme si attiva per interruzione sul circuito di uscita o per anomaliedi cablaggio lato uscita durante la procedura di auto-tuning.• Se si verifica un errore di comunicazione durante la comunicazione serialeRS485, viene attivato questo allarme.NOTE:1) Se l'alimentazione inverter viene a mancare simultaneamente ad una segnalazione di allarme,esso non potrà essere mantenuto.PRGRESET2) Per inviare il comando di reset all'inverter, premere il tasto sul pannello di comandi, ocollegare e successivamente scollegare i morsetti P24 e RST.3) Lo storico allarmi è aggiornato agli ultimi 4 allarmi.• Serie da 400 V: 400 VCC.• Serie da 200 V: 200 VCC.Durantel'accelerazione.Durante ladecelerazione.Funzionamentoa regime.Durante.l'accelerazioneDurante ladecelerazione.Funzionamentoa regime.Sovraccaricomotore 1Sovraccaricomotore 2• È possibile disattivare la funzioneanti-stallo.• Utilizzo dell'ingresso digitale THR.• Morsetti: 30A, 30B, 30C.• Utilizzare il morsetto di ingresso RST peringresso segnale di reset.• Anche se l'alimentaz. viene a mancare la causadell'allarme e lo storico allarmi sono mantenuti.• Se controllato con segnali esterni, l'inverterpermane in marcia. Non viene segnalatoalcun allarme, ma viene indi<strong>cat</strong>o solo Er2.Displ.<strong>GVX1000</strong>23
DIMENSIONI DI INGOMBRO6.570 (W)57 6.54-5×6(FORO ALLUNGATO)D86 (D1)D2165106 (W)96 52-5×6 (FORO ALLUNGATO)D1DD226170 (W)6 15862-5×6 (FORO ALLUNGATO)86 (D1)DD2365P R GRESETRUNP R GRESETRUNFUNCDATASTOP130 (H)120FUNCDATASTOP<strong>GVX1000</strong>WARNINGM2.5130 (H)<strong>11</strong>82-R2.6FVR-E<strong>11</strong>WARNINGM2.55665.2 5.2M4 19 D35 5M3.5 16.5D3D4D4<strong>GVX1000</strong>-0.2-S<strong>GVX1000</strong>-0.4-S<strong>GVX1000</strong>-0.75-S<strong>GVX1000</strong>-0.4-T<strong>GVX1000</strong>-0.75-T<strong>GVX1000</strong>-1.5-T<strong>GVX1000</strong>-2.2-T78180 (W)16482- 6158 (D)84P R GRESETRUNP R GRESETRUNFUNCDATASTOPFUNCDATASTOP130 (H)<strong>11</strong>82-R2.6<strong>GVX1000</strong>WARNINGM2.5220 (H)205<strong>GVX1000</strong>WARNINGM2.565.2 5.2 M4D32-R3D4766M596.7<strong>11</strong>6.7 (D3)146.1 (D4)<strong>GVX1000</strong>-4.0-T<strong>GVX1000</strong>-1.5-S<strong>GVX1000</strong>-2.2-S<strong>GVX1000</strong>-5.5-T<strong>GVX1000</strong>-7.5-T421770 34.324.75 60.54.754.75 32.54.75Pannello di comando (per tutti i modelli)P R GRESETFUNCDATA2-ø3.2Counter bore ø6.6, depth 453RUNSTOP271512.560.5±0.348.25±0.52621.8222.25±0.5532.5±0.3AlimentazioneTrifase400VMonofase230VPotenzanominalemotore[kW]0.40.751.52.24.05.57.50.20.40.751.52.2Tipo<strong>GVX1000</strong>-0.4-T<strong>GVX1000</strong>-0.75-T<strong>GVX1000</strong>-1.5-T<strong>GVX1000</strong>-2.2-T<strong>GVX1000</strong>-4.0-T<strong>GVX1000</strong>-5.5-T<strong>GVX1000</strong>-7.5-T<strong>GVX1000</strong>-0.2-S<strong>GVX1000</strong>-0.4-S<strong>GVX1000</strong>-0.75-S<strong>GVX1000</strong>-1.5-S<strong>GVX1000</strong>-2.2-SW1061061061061701801807070106170170H130130130130130220220130130130130130DimensioniD<strong>11</strong>412617017015815815810<strong>11</strong>18126158158D1868610610686--8686868686D22840646472--1532407272D350.562.586.586.594.5<strong>11</strong>7<strong>11</strong>74360639595D4103<strong>11</strong>515915914714614690.2107<strong>11</strong>5147147Fig.2222344<strong>11</strong>2332- 3.5Posizione fori di fissaggio24
OPZIONIFiltri EMCAlimentazionePotenza[kW]Modello GVXFiltro EMCFiltroTensionenominale[V]Correntenominale[A]Corrente didispersione[mA]FiltriTrifase400VMonofase230V0.4 a 0.751.5 a 2.24.05.5 a 7.50.2 a 0.40.751.5 a 2.2<strong>GVX1000</strong>-0.4 a 0.75-T<strong>GVX1000</strong>-1.5 a 2.2-T<strong>GVX1000</strong>-4.0-T<strong>GVX1000</strong>-5.5 a 7.5-T<strong>GVX1000</strong>-0.2 a 0.4-S<strong>GVX1000</strong>-0.75-S<strong>GVX1000</strong>-1.5 a 2.2-SEFL-0.75E<strong>11</strong>-4EFL-2.2E<strong>11</strong>-4EFL-4.0E<strong>11</strong>-4EFL-7.5E<strong>11</strong>-4EFL-0.4E<strong>11</strong>-7EFL-0.75E<strong>11</strong>-7EFL-2.2E<strong>11</strong>-750025051015306,51829<strong>11</strong>,32520,3WW1DAlimentazioneFiltro EMCFiltroDimensioni [mm]W W1 H H1 DPeso[kg]H1HTrifase400VMonofase230VEFL-0.75E<strong>11</strong>-4EFL-2.2E<strong>11</strong>-4EFL-4.0E<strong>11</strong>-4EFL-7.5E<strong>11</strong>-4EFL-0.4E<strong>11</strong>-7EFL-0.75E<strong>11</strong>-7EFL-2.2E<strong>11</strong>-7<strong>11</strong>01741827<strong>11</strong>1017480145558014519127818919<strong>11</strong>6525217816541465036410,750,951,351,980,470,751,1Resistenze di frenaturaTipo inverterCodiceresistenzaCoppia difrenaturaHDimensioniL D H1DC Resistenze di frenaturaAlimentaz.monofaseAlimentazione trifase<strong>GVX1000</strong>-0.2-S<strong>GVX1000</strong>-0.4-S<strong>GVX1000</strong>-0.75-S<strong>GVX1000</strong>-1.5-S<strong>GVX1000</strong>-2.2-S<strong>GVX1000</strong>-0.4-T<strong>GVX1000</strong>-0.75-T<strong>GVX1000</strong>-1.5-T<strong>GVX1000</strong>-2.2-T<strong>GVX1000</strong>-4.0-T<strong>GVX1000</strong>-5.5-T<strong>GVX1000</strong>-7.5-TSR-0.75-SSR-1.5-SSR-2.2-SSR-0.75-TSR-1.5-TSR-2.2-TSR-4.0-TSR-<strong>11</strong>-T150%279010590105155105155367994799414494144* Il dimensionamento dei resistori indi<strong>cat</strong>i in tabella è volto esclusivamenteall’ottenimento delle prestazioni di coppia dichiarate.* Il tempo di frenatura considerato è di 5sec con duty cycle del 5%.* Per applicazioni con tempi di frenatura o duty cycle differenti, per rigenerazioneo frenatura continuativa, contattare Silectron sistemi fornendo i dati sulla tipologiadell’applicazione, tempi ciclo e momento d’inerzia del carico.* Il costruttore si riserva il diritto di modificare in qualsiasi momento le dimensionie le caratteristiche dei resistori senza preavviso.<strong>GVX1000</strong>25
Induttanze ingresso-uscita ACTipo inverterInduttanzaACIn/OutDimensioniH L DAlimentazionemonofaseAlimentazione trifase<strong>GVX1000</strong>-0.2-S<strong>GVX1000</strong>-0.4-S<strong>GVX1000</strong>-0.75-S<strong>GVX1000</strong>-1.5-S<strong>GVX1000</strong>-2.2-S<strong>GVX1000</strong>-0.4-T<strong>GVX1000</strong>-0.75-T<strong>GVX1000</strong>-1.5-T<strong>GVX1000</strong>-2.2-T<strong>GVX1000</strong>-4.0-T<strong>GVX1000</strong>-5.5-T<strong>GVX1000</strong>-7.5-TSI-0.2-SSI-0.75-SSI-2.2-SSI-0.75-TSI-1.5-TSI-2.2-TSI-4.0-TSI-7.5-TSI-15-TInIn/Out45909514550728814045608080200 185 120* Le induttanze elen<strong>cat</strong>e in tabella sono dimensionate per applicazioni chesoddisfano le seguenti condizioni:frequenza operativa inferiore a 70 Hz;il numero massimo dei motori collegati è pari a 2.* Il costruttore si riserva il diritto di modificare in qualsiasi momento le dimensionie le caratteristiche delle induttanze senza preavviso.Cavo remotazione tastiera con adattatore per pannello comandiCavoAdattatore8.821.348<strong>11</strong>4.3415.0833.7731.2717.5L=5000±50mm23MAX.2.5Sezioni dei cavi di collegamentoAlimentazioneTrifase400VMonofase230VPotenzanominalemotore[kW]0.4, 0.751.52.24.05.57.50.20.40.751.52.2Tipo inverter<strong>GVX1000</strong>-0.4, 0.75-T<strong>GVX1000</strong>-1.5-T<strong>GVX1000</strong>-2.2-T<strong>GVX1000</strong>-4.0-T<strong>GVX1000</strong>-5.5-T<strong>GVX1000</strong>-7.5-T<strong>GVX1000</strong>-0.2-S<strong>GVX1000</strong>-0.4-S<strong>GVX1000</strong>-0.75-S<strong>GVX1000</strong>-1.5-S<strong>GVX1000</strong>-2.2-SDispositivi diprotezione [A]Con DCR5551015205101520SenzaDCR51015203040510152030Circuito d’ingresso[L1/R, L2/S, L3/T]SenzaCon DCRDCRNOTE:• Per interruttori automatici e differenziali la scelta di tipo e taglia dipende dalle caratteristiche di impedenza della linea e del trasformatore di linea.• La sezione cavi raccomandata indi<strong>cat</strong>a in tabella, assume la condizione di temperatura interna quadro non superiore a 50°C.• I cavi indi<strong>cat</strong>i sono ad isolamento non propagante la fiamma (75°C).• I dati della tabella possono variare a seconda delle condizioni (temperatura ambiente, tensione di alimentazione, etc.).2.02.0Sezione cavi raccomandata [mm 2 ]2.03.52.03.5Circuitod’uscita[U, V, W]2.02.0CircuitoDCR[P1, P(+)]2.02.0CircuitoDB[P(+), DB, N(-)]2.02.026
GLI INVERTER DELLA SERIE <strong>GVX1000</strong>OFFRONO SOLUZIONI COMPATTE IN OGNI CAMPO APPLICATIVOVentilazione• Sistemi di condizionamento(per l’industria, il terziario e il civile)• Essi<strong>cat</strong>ori• Ventilatori per caldaie• Soffianti per scambiatori di calore• Compressori• Sistemi di ventilazione• Apparecchiature per il condizionamentoMacchine per il confezionamento• Macchine dosatrici• Impacchettatrici• Macchine per l’imballaggio finaleMacchine per il settore alimentare• Miscelatori e separatori• Affettatrici• Macinatori e frantoi• Vibrosetacci e convogliatoriMacchine per la carta ed il tessile• Rifilatrici• Filatoi e torcitoi• Macchine circolari per maglieria• Stampa su tessuto• SpecchiPompaggioSistemi di approvvigionamento a chiamata• Pompe sommerse• Pompe per il vuoto• Pompe a getto• Pompe di raffreddamento• Pompe di ricircolo acqua calda• Pompe di emergenza trasportabili• Pompe per silos• Sistemi di trattamento delle acque• Pompe a flusso costante• Pompe per fanghiMacchine per l’industria chimicae del legno• Miscelatori• Eccentrici• Separatori centrifughi• Impiallicciatrici• Rettifi<strong>cat</strong>rici• PiallatriciSistemi di movimentazione• Immagazzinaggio automatico• Trasportatori (a nastro, a <strong>cat</strong>ena, a vite, a rulli)• Porte automatiche veloci• Dispositivi di trasferimentoAltri macchinari• Alimentatori e dosatori• Lavatrici professionali• Rilegatrici• Cabine per autolavaggio• Lavastoviglie• Apparecchaiture per laboratori• Pigiatrici• Cancelli e porte automatiche• Deraspatrici<strong>GVX1000</strong>27
NOTEApplicazioni con motori standard• Controllo di un motore StandardControllando un motore da 400 V con un inverterpotrebbero sorgere problemi per l’isolamento delmotore. Prevedere in tal caso l’impiego di un filtroin uscita inverter (OFL) approvato dal costruttoreoppure utilizzare un motore con isolamentorinforzato.• Caratteristiche di coppia e aumento temperaturaAlimentando un motore standard con inverter, latemperatura dello stesso raggiunge livelli piùelevati che nel caso di alimentazione da rete.L’effetto del raffreddamento cala alle basse velocitàe andrebbe previsto un declassamento di coppia(se è richiesta la coppia nominale alle bassevelocità), oppure prevedere un sistema diventilazione forzata.• VibrazioneUn inverter non induce vibrazioni sul motore cuiè appli<strong>cat</strong>o, ma quando il motore viene installatosu una macchina possono nascere delle frequenzadi risonanza sull’intero sistema. Si raccomandadi usare accoppiamenti atti a smorzare le vibrazionimeccaniche. Si raccomanda inoltre di impiegarequalora risulti necessario la funzione di saltofrequenza per evitare eventuali punti di risonanzanel motore. Un motore a 2 poli a 60 Hz o più puòcausare vibrazioni anomale.• RumoreLa rumorosità di un motore azionato da inverternormalmente aumenta rispetto al caso dialimentazione da rete. Per ridurre il livello dirumorosità regolare al valore massimo lafrequenza portante.Applicazioni con motori speciali• Motori per applicazioni con pericolo di esplosionePer zone a pericolo di esplosione, impiegaremotore ed inverter appositamente classifi<strong>cat</strong>i edapprovati allo scopo. Tali prodotti sono inseriti inserie di produzioni speciali. Contattare Silectronsistemi.• Motori e pompe sommerseTali motori hanno un livello di corrente nominalesuperiore rispetto alle applicazioni standard.Scegliere un inverter la cui corrente nominale siamaggiore o uguale al motore da azionare. Vi èdifferenza anche sulle caratteristiche di protezionetermica, pertanto regolare il relè elettronicodell’inverter sulla base delle caratteristichetermiche del motore da azionare.• Motori autofrenantiPer motori dotati di dispositivo frenante parallelo,collegare sempre il circuito del frenoall’alimentazione a monte dell’inverter (rete dialimentazione commerciale). Collegando pererrore il freno motore sul circuito di potenza avalle dell’inverter l’applicazione sarà a rischio diincidenti o malfunzionamenti. Non usare mail’inverter per motori con il circuito frenante serie.• MotoriduttoriSe il sistema di trasmissione meccanico utilizzaun riduttore o un variatore meccanico lubrifi<strong>cat</strong>iad olio, tenere presente che operando a bassevelocità con l’inverter si possono causare problemimeccanici per l’insufficiente lubrificazione.• Motori sincroniE’ possibile il controllo di questi motori con unsoftware speciale. Contattare Silectron sistemi.• Motori monofaseCon l’inverter non è possibile il controllo di motorimonofase. Anche se dall’uscita inverter è possibileottenere una singola fase, impiegare solo il tipodi uscita trifase.Dispositivi elettrici periferici• Luogo di installazioneUsare l’inverter in un range di temperaturecompreso tra –10 e 50 °C. Installare l’inverter inmateriale non infiammabile. Le superficidell’inverter e della resistenza di frenatura sottocerte condizioni di impiego possono divenire moltocalde.• Installazione dei dispositivi di protezioneInstallare un interruttore magnetotermico odifferenziale a monte dell’inverter a protezionedel circuito elettrico.• Contattore elettromagnetico in uscitaSe vengono montati dei contattori magnetici perla commutazione dell’alimentazione di diversimotori in uscita o per la loro alimentazione darete, assicurarsi che l’inverter sia in stop primadi eseguire qualsiasi commutazione.• Contattore elettromagnetico in ingressoNon azionare tale dispositivo per più di una voltaall’ora. Per operazioni di marcia e arresto frequentiimpiegare gli ingressi digitali FWD e REV sullamorsettiera di controllo.• Protezione del motoreNel controllo di un motore con inverter, esso puòessere protetto termicamente grazie alla funzionedi protezione termica di sovraccarico.In aggiunta al livello di corrente di protezione ,impostare il tipo di raffreddamento del motore.Per motori ad alta velocità o raffreddati ad acqua,regolare un elevato valore sulla costante di tempotermica e proteggere il motore attraverso il segnaledel sistema di raffreddamento.Nel controllo multimotore, collegare un relè diprotezione termica su ciascun motore.Se si connette un relè di protezione termica delmotore all’inverter con un cavo lungo, le correntidi perdita ad alta frequenza circolanti sulle capacitàparassite distribuite del cavo stesso, possonoprovocare l’intervento del dispositivo di protezionead un livello inferiore rispetto a quello impostato.Se ciò accade, abbassare il valore di frequenzaportante o impiegare un filtro in uscita (OFL).• Condensatori di correzione del circuito di potenzaNon montare condensatori di rifasamento nelcircuito di ingresso o di uscita dell’inverter(impiegare la reattanza in continua DCR). Evitarnealtresì l’impiego sul circuito di uscita per evitareallarmi per sovracorrente e l’interruzione delleoperazioni.• Riduzione del rumoreImpiegare il filtro EMI apposito concordementealla direttiva europea in materia EMC e usarecavi schermati per la connessione del motore.Per dettagli riferirsi al manuale di istruzioni.• Contromisure sui disturbi impulsivi in ingressoSe un allarme di sovratensione (OU) avviene adinverter spento o nell’azionamento di un piccolocarico, è possibile che ciò sia dovuto allaapertura/chiusura di batterie di condensatori peril recupero del fattore di potenza (rifasamento)sulla linea di alimentazione. In tal caso connettereuna reattanza DC.• Test meggerPer misurare la resistenza di isolamento dei circuitidell’inverter, usare un megger test a 500Vseguendo le istruzioni riportate sul suo manualedi istruzioni.Cablaggi• Lunghezza cavi del circuito di controlloNel controllo dell’inverter con dispositivi remoti,utilizzare per la connessione cavi di lunghezzainferiore a 20m. impiegando cavo attorcigliato eschermato.• Lunghezza cavi inverter motoreIl cavo di lunghezza elevata tra inverter e motore,potrà produrre surriscaldamento o allarmenell’inverter a causa delle sovracorrenti dovutealla circolazione di correnti di perdita ad altafrequenza nelle capacità parassite del cavoschermato delle fasi motore. Assicurarsi che ilcablaggio sia inferiore a 50m. In caso contrarioabbassare la frequenza portante o collegare unfiltro sul circuito d’uscita inverter (OFL).• Sezione caviSelezionare un cavo di capacità sufficiente e disezione ottimale riferendosi ai valori di correnteriportati dalle specifiche o alle sezioniraccomandate nel manuale.• Messa a terraConnettere a terra l’inverter usando l’appositomorsetto di terra dello chassis.Selezione della taglia inverter• Azionamento di motori standardSelezionare il modello di inverter secondo quantoriportato nella tabella di specifiche sulla potenzadel motore applicabile. Se vengono richiestedall’applicazione coppie di spunto elevate oaccelerazioni e decelerazioni in tempi brevi,selezionare un inverter di una classe di potenzapiù elevata.• Azionamento di motori specialiSelezionare un inverter che soddisfi la seguentelegge: corrente nominale inverter > correntenominale motoreTrasporto ed immagazzinaggioNel trasporto o immagazzinaggio di inverter,selezionare le procedure e i siti che soddisfino lecondizioni ambientali riportati nelle specifiche.Assicurarsi che tali condizioni siano soddisfatteanche inerentemente al luogo d’installazionedell’inverter.28
<strong>GVX1000</strong>