W - Dipartimento di Analisi e Progettazione Strutturale - Università ...
W - Dipartimento di Analisi e Progettazione Strutturale - Università ...
W - Dipartimento di Analisi e Progettazione Strutturale - Università ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
INDICEFormula gra<strong>di</strong>ente III_______________________________________________________82Equazione <strong>di</strong> continuità in SPH_______________________________________________85Equazione del Moto in SPH _________________________________________________86Equazione dell’energia in SPH _______________________________________________894.4.4 – I limiti del Metodo SPH _________________________________________________91Instabilità <strong>di</strong> tensione_______________________________________________________91Con<strong>di</strong>zioni <strong>di</strong> vincolo ______________________________________________________95Capitolo 5 _______________________________________ 97Modellazione Numerica con LS-Dyna Version 970. _____ 975.1 - Software LS-Dyna Version 970 _______________________________________ 975.2 – Modellazione della Prova Sperimentale_______________________________ 1015.2.1 – Modello FEM ________________________________________________________1025.2.2 – Modello SPH ________________________________________________________111Capitolo 6 ______________________________________ 117Legami Costitutivi del Calcestruzzo _________________ 1176.1 – Pseudo – Tensor(Mat_016) _________________________________________ 1176.2 – Concrete Damage (Mat_072) _______________________________________ 1256.2.1 – Parametri che definiscono le superfici <strong>di</strong> rottura _____________________________1286.4 – Dynamic Increase Factor (DIF) _____________________________________ 137• Cowper and Symonds. __________________________________________________139• Legame Tensione-Deformazione Parametrico. _______________________________139• Curva <strong>di</strong> Strain-Rate. ___________________________________________________1406.4.1 – Definizione della Curva <strong>di</strong> Strain-Rate ____________________________________1406.4.2 – Origini della formulazione CEB-FIP ______________________________________1416.3 – Equation of State Form 8 (Tabulated Compaction) _____________________ 149Capitolo 7 ______________________________________ 161Risultati delle Simulazioni Numeriche _______________ 1617.1 – Prova Sperimentale I e II __________________________________________ 162• Modello FEM, sud<strong>di</strong>visione della piastra in 11520 Element_Solid, Prova 1: ________163• Modello FEM, sud<strong>di</strong>visione della piastra in 11520 Element_Solid, Prova 2: ________164• Modello SPH, sud<strong>di</strong>visione della piastra in 11520 Element_SPH, Prova 1: _________166• Modello SPH, sud<strong>di</strong>visione della piastra in 11520 Element_SPH, Prova 2: _________1687.2 – Prova Sperimentale III ____________________________________________ 169• Modello FEM, sud<strong>di</strong>visione della piastra in 11520 Element_Solid, Prova 3: ________171• Modello SPH, sud<strong>di</strong>visione della piastra in 11520 Element_SPH, Prova 3: _________1767.3 – Prova Sperimentale IV ____________________________________________ 181CONCLUSIONI _________________________________ 186In<strong>di</strong>ce delle Figure _______________________________ 191In<strong>di</strong>ce dei Grafici ________________________________ 192In<strong>di</strong>ce delle Tabelle_______________________________ 1935
INDICEBibliografia _____________________________________ 195Ringraziamenti __________________________________ 1986
INTRODUZIONE• SPH (Smoothed Particle Hydrodynamics), appartengono ai meto<strong>di</strong><strong>di</strong> tipo Meshfree, <strong>di</strong>scretizza il continuo me<strong>di</strong>ante un numero finitod’elementi particellari.L’oggetto del lavoro <strong>di</strong> tesi risiede nell’affrontare ognuna delleproblematiche in precedenza descritte. Ragion per cui, si è scelto <strong>di</strong>modellare numericamente una prova sperimentale condotta su unapiastra in c.a. sottoposta a carichi da esplosione. Nei capitoli successivisi descriveranno le metodologie adottate per il calcolo delle azioniesercitate sull’elemento strutturale prodotte dall’esplosione, e quelleutilizzate per la <strong>di</strong>scretizzazione e l’analisi numerica della provasimulata.Inoltre, si farà un esplicito riferimento al co<strong>di</strong>ce <strong>di</strong> calcolo impiegato perla suddetta modellazione, e sulle scelte riguardanti il legame costitutivoimplementato al fine <strong>di</strong> modellare il calcestruzzo armato, in modo tale dapoter considerare il già menzionato effetto <strong>di</strong> Strain-Rate-Sensitivity.A conclusione della tesi si riporteranno i risultati ottenuti me<strong>di</strong>antel’utilizzo <strong>di</strong> due <strong>di</strong>versi meto<strong>di</strong> d’analisi, tra cui il tra<strong>di</strong>zionale metododegli elementi finiti (FEM), che rientra tra i meto<strong>di</strong> Lagrangiani primacitati, e il più innovativo Smoothed Particle Hydrodynamics (SPH).Dal confronto operato tra i risultati conseguiti me<strong>di</strong>ante i due meto<strong>di</strong>d’analisi, e tra gli stessi e quelli ottenuti in seguito alle provesperimentali se ne trarranno le successive conclusioni.9
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEenorme potere <strong>di</strong>struttivo legato soprattutto alla loro elevata velocità <strong>di</strong>detonazione, all’effetto prodotto dall’onda <strong>di</strong> pressione sviluppatadall’esplosione, e in misura minore agli effetti prodotti dalle schegge. Gliesplosivi commerciali d’uso civile, impiegati per la demolizione <strong>di</strong>strutture esistente o per l’apertura <strong>di</strong> scavi in roccia, sono solitamenteutilizzati con cariche intasate, in altre parole introdotte in fori realizzatinella roccia o nel terreno.Le esplosioni chimiche sono sud<strong>di</strong>vise in deflagrazioni, nelle quali lapropagazione della reazione chimica d’esplosione è una forma <strong>di</strong>combustione che procede nel materiale a velocità subsonica, edetonazioni, nelle quali la reazione chimica d’esplosione non è unacombustione ma una decomposizione <strong>di</strong>retta della molecola d’esplosivo,innescata <strong>di</strong>rettamente dall'onda d'urto, la reazione d’esplosione procedequin<strong>di</strong> alla velocità del suono in quella particolare sostanza attraversotutto il materiale, e la pressione e temperatura finale dei prodotti <strong>di</strong>reazione sono quin<strong>di</strong> molto più elevati [1]. Per caratterizzare la potenza<strong>di</strong> un esplosivo è possibile condurre una prova sperimentale, che prevedel’esplosione <strong>di</strong> una carica all’interno <strong>di</strong> un blocco <strong>di</strong> piombo le cui<strong>di</strong>mensioni sono standar<strong>di</strong>zzate. Eseguendo in seguito una misurazionedel volume della cavità creatasi al suo interno, è possibile stabilire unacorrelazione tra la potenza della gelatina esplosiva, ritenuto uno degliesplosivi più potenti, con altre tipologie <strong>di</strong> cariche esplosive, associandoconvenzionalmente alla gelatina una potenza pari a 100 [1]. In ambitomilitare ma anche in campo civile si preferisce definire un caricoesplosivo equivalente, calcolando dei coefficienti d’equivalenza rispettoal Trinitrotulene (TNT), per la quale si assume un coefficiente unitario[1].11
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONE1.1.2 – Esplosione in AriaSi vogliono descrivere gli effetti prodotti da un’esplosione che avvienein aria libera, considerata puntuale ed istantanea, alla quale corrispondeil rilascio <strong>di</strong> una certa quantità d’energia E.Ciò che interessa definire, è l’incremento <strong>di</strong> pressione del mezzocircostante la carica esplosiva, in un dato istante <strong>di</strong> tempo t, ad una certa<strong>di</strong>stanza ra<strong>di</strong>ale R(t) dal centro d’esplosione, supponendo che sia <strong>di</strong> tiposferico.Rispetto alle con<strong>di</strong>zioni imperturbate del mezzo, alle quali corrispondeuna certa pressione p 1 , in seguito al passaggio del fronte d’onda, si avràuna nuova pressione p 2 , maggiore <strong>di</strong> quella iniziale.L’ipotesi <strong>di</strong> base è che le trasformazioni <strong>di</strong> natura termo<strong>di</strong>namicheassociate all’esplosione, siano a<strong>di</strong>abatiche, in altre parole comporterannouno scambio <strong>di</strong> calore tra l’ambiente interno, in cui si ha l’esplosione, equello esterno, in cui si ha la propagazione della stessa. Inoltre, l’ariaattraverso la quale si propaga l’onda d’urto, è considerata come un gaspolitropico, per il qual è vera la seguente espressione:pv n = cost.Dove p è la pressione, v è il volume specifico per unità <strong>di</strong> massa, e n è uncoefficiente numerico a<strong>di</strong>mensionale, che assume valori <strong>di</strong>versi aseconda che la trasformazione del gas sia isoterma o a<strong>di</strong>abatica, inquesto caso essendo a<strong>di</strong>abatica vale 4,21 [3].Per definire la velocità, la pressione, e la densità <strong>di</strong> massa del mezzoattraversato dal fronte d’onda ad un generico istante <strong>di</strong> tempo t, saràquin<strong>di</strong> necessario descrivere il moto del gas.16
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONETale moto è univocamente determinato, una volta noti la densità <strong>di</strong>massa in<strong>di</strong>sturbata dell’aria ρ 1 , l’energia sprigionata dall’esplosione E,ed una volta fissati l’istante <strong>di</strong> tempo t e la <strong>di</strong>stanza ra<strong>di</strong>ale r dal centrod’esplosione.Dalla successiva relazione si ricava la posizione ra<strong>di</strong>ale del fronte d’ondaad un generico istante <strong>di</strong> tempo t:λ12( Et ) k= r ρ 2 +1Dove k è un parametro a<strong>di</strong>mensionale, che assume valore pari a 1, 2, o 3,a seconda che l’espansione del gas è mono<strong>di</strong>mensionale, bi<strong>di</strong>mensionaleo tri<strong>di</strong>mensionale [3].Da cui, la posizione ra<strong>di</strong>ale dell’onda d’urto all’istante t sarà:R() t=⎛β⎜⎝Etρ12⎞⎟⎠12 + kDove β è una costante a<strong>di</strong>mensionale, definita in funzione del rapportopolitropico γ tra il calore specifico del gas a pressione costante, e avolume costante dell’aria[3].Attraverso la precedente relazione, si è quin<strong>di</strong> in grado <strong>di</strong> in<strong>di</strong>viduare adogni istante, in seguito all’esplosione, la posizione del fronte d’onda.Noto R(t), si può calcolare la velocità con la quale si propaga l’ondad’urto nel mezzo circostante, come:U ( t ) =dRdt17
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONELa pressione del fronte d’onda è quin<strong>di</strong> una funzione inversamenteproporzionale della <strong>di</strong>stanza R dal centro d’esplosione.In particolar modo al variare della costante k, che come già detto assumevalori <strong>di</strong>versi a seconda che la propagazione del fronte d’urto siamono<strong>di</strong>mensionale, bi<strong>di</strong>mensionale, o tri<strong>di</strong>mensionale, questaproporzionalità inversa sarà lineare, quadratica o cubica.Nel caso <strong>di</strong> propagazione tri<strong>di</strong>mensionale, l’attenuazione della pressionesul fronte d’onda, sarà ancora più rapida all’aumentare della <strong>di</strong>stanzara<strong>di</strong>ale dal centro d’esplosione.Il picco <strong>di</strong> pressione, in altre parole la massima pressione conseguita inun punto generico dello spazio, a <strong>di</strong>stanza R dal centro d’esplosione, sidefinisce come somma <strong>di</strong> 4 contributi:ΔA A Ap = + + +R R R1 23A23 4Dove le 4 costanti, A 1 , A 2 , A 3 , e A 4 , sono determinate attraversoun’interpolazione lineare dei risultati numerici <strong>di</strong> prove sperimentali, che<strong>di</strong>pendono dal peso della carica esplosiva W, me<strong>di</strong>ante la cosiddettaDistanza Ridotta, a sua volta definita come:Z =R3WIl concetto <strong>di</strong> <strong>di</strong>stanza ridotta, s’introduce per in<strong>di</strong>viduare la <strong>di</strong>stanza dalcentro d’esplosione, alla quale due cariche esplosive, con la stessaenergia specifica d’esplosione, ma con peso <strong>di</strong>fferente, W 1 e W 2 ,generano lo stesso effetto in termini <strong>di</strong> pressione. Analogamente, per duecariche esplosive con lo stesso peso W, ma con energie specifiche19
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEd’esplosione <strong>di</strong>verse, E 1 ed E 2 , s’in<strong>di</strong>vidua la <strong>di</strong>stanza alla quale le duecariche generano la stessa pressione [3].Nelle applicazioni pratiche, per la valutazione della pressione in ungenerico punto dello spazio, in<strong>di</strong>viduato dalla <strong>di</strong>stanza ridotta Z dalcentro d’esplosione, e in un generico istante <strong>di</strong> tempo t, sono impiegateformulazioni semiempiriche come la seguente:pt−+⎛ t ⎞αt( Z , t ) = py− p0= Δ p ( Z ) ⎜ 1 −+⎟ e⎝t⎠+Dove p + y è la massima pressione della fase positiva, p 0 è la pressione incon<strong>di</strong>zioni in<strong>di</strong>sturbate del mezzo <strong>di</strong> propagazione, pressioneatmosferica nel caso dell’aria, t + è la durata della fase positiva <strong>di</strong>sovrapressione, α è un coefficiente <strong>di</strong> natura sperimentale definito infunzione della <strong>di</strong>stanza ridotta Z, e Δp(Z) è il picco <strong>di</strong> pressione alla<strong>di</strong>stanza ridotta Z [3].La durata della fase positiva <strong>di</strong> sovrapressione, la si può valutare comesegue (M. A. Sadowsky):t + 3 6= B ⋅ 10 −WRDove, il tempo è espresso in secon<strong>di</strong>, B è una costante che si assumenella pratica pari a 1,3 [3].20
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONE1.1.3 –L’esplosione in centri abitatiNel momento in cui l’esplosione avviene in un centro abitato, la suapropagazione in aria può essere descritta come se avvenisse attraverso uninsieme <strong>di</strong> canali [3]. In questo caso l’onda <strong>di</strong> sovrapressione incontreràstrade, piazze ed e<strong>di</strong>fici, che ne determineranno delle riflessioni. Lestrade sono quin<strong>di</strong> considerate come dei canali lateralmente confinatidalla presenza degli e<strong>di</strong>fici.Si supponga <strong>di</strong> prendere in considerazione un’esplosione <strong>di</strong> tipopuntuale, che avviene ad una <strong>di</strong>stanza R 0 dalla sezione d’imbocco delnostro canale. L’onda d’urto prodotta dall’esplosione, inizialmentesferica, raggiunta la sezione iniziale del canale, si trasforma da sferica inpiana. Questa trasformazione si deve alle riflessioni multiple dell’ondacontro le pareti laterali del canale, e alle sovrapposizioni <strong>di</strong> questeultime. In questo modo gli effetti dell’esplosione si risentono anche a<strong>di</strong>stanze maggiori rispetto al caso d’assenza d’ostacoli.E’ interessante determinare la pressione prodotta nell’atmosfera ad unacerta <strong>di</strong>stanza r dal centro d’esplosione. In generale, si può affermare chequesta sia pari a:p ( r ) =ArDove r è la <strong>di</strong>stanza dal centro d’esplosione, ed A una costante [3].Se s’in<strong>di</strong>ca con r = R 1 la <strong>di</strong>stanza dal centro d’esplosione della sezioneiniziale del canale, dove la pressione vale p 0 , la costante A si calcolacome:A = R 1 p 023
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONELa pressione in una generica sezione x del canale sarà calcolata come:p ( x)=pR10R+1xDove, p 0 è la pressione calcolata sul fronte d’onda sferico alla <strong>di</strong>stanzaR 0 dalla carica esplosiva [3].Dalla precedente espressione si evince come all’aumentare della <strong>di</strong>stanzadal centro d’esplosione si abbia una riduzione della pressione prodotta,essendo questa ultima inversamente proporzionale alla <strong>di</strong>stanza x.In questa formulazione non si tiene conto del graduale passaggio dellasuperficie d’onda da sferica a piana, dell’influenza delle onde <strong>di</strong>riflessione sulle pareti che limitano lateralmente il canale, e degli effetti<strong>di</strong>ssipatevi dovuti alla rugosità delle pareti del condotto.E’ quin<strong>di</strong> necessario introdurre dei coefficienti correttivi che terrannoconto <strong>di</strong> questi fenomeni. S’introduce quin<strong>di</strong> un coefficiente α,compreso tra 0 e 1, che moltiplicato per R 0 riduce la <strong>di</strong>stanza del centrod’esplosione dalla sezione d’imbocco [3]. Il coefficiente amplificativoΩ, che tiene conto della sovrapposizione delle onde <strong>di</strong> riflessione, talecoefficiente si assume sempre inferiore all’unità. Infine un termineesponenziale, in funzione del quale all’aumentare della <strong>di</strong>stanza x lungoil canale, si ha una riduzione della pressione in virtù degli effetti<strong>di</strong>ssipativi. Sperimentalmente, è possibile <strong>di</strong>mostrare che tali effetti<strong>di</strong>ssipativi, siano funzione della rugosità delle pareti laterali del condotto,espresse me<strong>di</strong>ante un coefficiente <strong>di</strong> attrito ξ, a sua volta funzione della<strong>di</strong>mensione trasversale del canale D, e dell’altezza relativa delle asperitàh [3].24
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEL’espressione corretta della pressione prodotta ad una generica ascissa xdel canale sarà [3]:p(x)=ΩpRα − 0 , 4 ξ0 1( α R + x )1exDDa questa formulazione, si evince che per ridurre la pressione èsufficiente aumentare la <strong>di</strong>mensione trasversale D del canale stesso.Questo si può fare realizzando delle camere d’espansione, che sono degliallargamenti della sezione trasversale corrente. A valle <strong>di</strong> questa camerad’espansione, nel momento in cui si ha un successivo restringimento delcondotto, la pressione è calcolata come [3]:pp12=⎛⎜⎝SS21⎞⎟⎠0 , 8Dove S 1 e S 2 , sono rispettivamente la <strong>di</strong>mensione trasversale delcondotto prima e dopo l’allargamento, cosi come p 1 e p 2 , sono le relativepressioni, all’ingresso del canale d’espansione, e nel canale d’uscita,quest’ultima p 2 sarà incognita.Quando lungo il canale principale, l’onda <strong>di</strong> sovrapressione incontradelle curve o delle <strong>di</strong>ramazioni, la pressione che si avrà a valle delcambio <strong>di</strong> geometria del condotto, sarà valutata come un’aliquota dellapressione iniziale p 1 :p 2 = kp 1Dove k è un coefficiente <strong>di</strong> proporzionalità, che varia tra 0 e 1, e assumevalori <strong>di</strong>versi in funzione del tipo <strong>di</strong> <strong>di</strong>ramazione o cambio <strong>di</strong> geometriadel canale [3].25
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONE1.2 – InneschiGli Inneschi possono essere realizzati con spolette, corde <strong>di</strong> detonazione,micce d’accensione o detonatori, in grado <strong>di</strong> provocare l’esplosione neitempi e nei mo<strong>di</strong> desiderati; molti <strong>di</strong> questi elementi sonosufficientemente piccoli da poter essere facilmente nascosti in un veicoloe quin<strong>di</strong> passare inosservati ad un controllo [2].In alcuni casi l’innesco <strong>di</strong> un esplosivo può indurre ad una reazione acatena, dovuto all’innesco successivo d’altri esplosivi nelle vicinanze.Ciò non sempre avviene, in quanto questo fenomeno e vincolato da unaserie <strong>di</strong> fattori tra cui la <strong>di</strong>stanza e la sensibilità degli esplosivi, laviolenza dell’esplosione e il mezzo attraverso il quasi si propaga.La scelta del sistema d’innesco <strong>di</strong>pende non solo dal tipo d’esplosione e<strong>di</strong> danno che si vuole provocare ma anche dal tipo d’esplosivo.Fatta eccezione per la polvere nera che può facilmente essere innescatame<strong>di</strong>ante l’accensione <strong>di</strong> una miccia, tutti gli altri esplosivi hannobisogno <strong>di</strong> un detonatore[2].La detonazione è un fenomeno chimico-fisico costituito da unaesplosione che si propaga ad una velocità supersonica costante, chegenera un'onda d'urto il cui campo <strong>di</strong> velocità a valle può essere ancorasupersonico (detonazione forte) oppure subsonico (detonazione debole)[2]. La velocità <strong>di</strong> detonazione è una funzione della densità del solidoimpiegato per la costruzione della carica esplosiva. Superato un certolimite <strong>di</strong> densità, la velocità <strong>di</strong> detonazione tende a <strong>di</strong>minuire a causadelle <strong>di</strong>fficoltà con le quali si sviluppano le reazioni chimiche, che sonoartefici della detonazione stessa. I Detonatori utilizzati per innescare gliesplosivi normali sono solitamente dei tubi sottili d’alluminio o <strong>di</strong> rame,contenenti vari tipi d’esplosivi primari e secondari presenti in piccole26
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEquantità, che li rendono molto sensibili alle azioni esterne tra cuipercussioni, shock e calore, per tale motivo vanno maneggiati concautela e mai trasportati insieme all’esplosivo. Gli esplosivi primari sonomolto sensibili agli urti, agli sfregamenti e al calore, sono usati neidetonatori per innescare l'esplosivo secondario. Gli esplosivi secondari,tranne qualche eccezione, non sono sensibili alle sollecitazionimeccaniche e termiche, e pertanto si possono definire stabili.I detonatori possono essere innescati a loro volta tramite uno shock nonelettrico, i detonatori non elettrici si ottengono me<strong>di</strong>ante l’accensione <strong>di</strong>una miccia vincolata alla sua estremità o da un pezzo <strong>di</strong> corda <strong>di</strong>detonazione, altresì da un detonatore elettrico costituito da un filamentoimbevuto in una miscela incen<strong>di</strong>aria, che è resa incandescente alpassaggio della corrente elettrica prodotta da una particolare batteriadefinita esplo<strong>di</strong>tore[2].Mentre i detonatori non elettrici sono istantanei, quelli elettrici possonoessere dotati <strong>di</strong> un <strong>di</strong>spositivo a tempo basato su un segnale elettronicoche agisce a <strong>di</strong>stanza, prodotto ad esempio da un semplice telefonocellulare, o basato su un periodo <strong>di</strong> innesco prefissato.Le spolette a tempo sono per lo più utilizzate per la detonazioned’or<strong>di</strong>gni militari (Bombe a Mano) [2].Una gran varietà <strong>di</strong> detonatori è facilmente reperibile in commercio econ varie <strong>di</strong>mensioni, tra cui le corde <strong>di</strong> detonazione dette anche micceor<strong>di</strong>narie a lenta combustione, utilizzate per l’innesco non elettrico deidetonatori stessi o d’altri esplosivi a debita <strong>di</strong>stanza e con sufficienteritardo <strong>di</strong> tempo. Queste sono realizzate con una polvere nera finissimache non emette odori identificabili, avvolta con un filo in una pellicola oin uno strato <strong>di</strong> plastica. Le stesse possono anche essere realizzatesostituendo alla polvere nera un esplosivo secondario ad alta velocità <strong>di</strong>27
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEdetonazione, in questo caso si parla <strong>di</strong> “miccia detonante“, usatasoprattutto per la detonazione contemporanea <strong>di</strong> più cariche <strong>di</strong>sposte a<strong>di</strong>stanza l’una dalle altre.1.3 – Dispositivi EsplosiviE’ possibile in<strong>di</strong>viduare <strong>di</strong>verse tipologie <strong>di</strong> <strong>di</strong>spositivi esplosivi che sicontrad<strong>di</strong>stinguono per innesco, cariche esplosive e contenitore.Secondo i loro impieghi, tali or<strong>di</strong>gni si <strong>di</strong>stinguono in tre <strong>di</strong>versecategorie, Militari, Commerciali o Civili ed “Improvvisati“.Gli Esplosivi Militari, come il trinitrotulene (TNT) e i vari esplosiviplastici tra cui il C-4, possono essere usati singolarmente o mescolati traloro o con altre sostanze, tra cui la polvere d’alluminio, per migliorarnele prestazioni. Lo stesso esplosivo plastico molto <strong>di</strong>ffuso negli Stati Unitisi ottiene proprio mescolando esplosivi secondari con sostanze plastichequali ad esempio i polimeri sintetici. Questi esplosivi sono caratterizzatida una densità simile a quella dell’acqua, sono tolleranti alle con<strong>di</strong>zionid’umi<strong>di</strong>tà e resistenti alle temperature estreme, si presentano sotto formee colori <strong>di</strong>versi fortemente <strong>di</strong>pendenti dai plastificanti e i colorantiutilizzati durante il processo <strong>di</strong> produzione. Data la loro tolleranza agliambienti umi<strong>di</strong> possono essere facilmente nascosti in liqui<strong>di</strong> acquosi,facendo attenzione ad evitare i solventi organici nei quali potrebbero<strong>di</strong>ssolversi.L’innesco avviene singolarmente o tra più carichi esplosivi attraversol’uso <strong>di</strong> uno o più “blasting cap“ (cappuccio esplosivo) [2].E’ stato provato che molti attacchi terroristici siano stati realizzatiproprio avvalendosi d’or<strong>di</strong>gni militari, con la possibilità <strong>di</strong> nasconderli insolventi organici, quale il gasolio, a patto <strong>di</strong> isolare completamente28
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEl’esplosivo dal solvente stesso; il beneficio che se ne trae è quello <strong>di</strong>confondere l’odore dell’esplosivo rendendolo quin<strong>di</strong> meno intercettabiledai controlli <strong>di</strong> sicurezza tenuti dalle unità cinofile.Gli Esplosivi Commerciali d’uso civile si <strong>di</strong>stinguono per <strong>di</strong>mensione,colore e consistenza, tra soli<strong>di</strong> e gelatinosi, tra questi maggiormenteimpiegati sono gli esplosivi da mina a base <strong>di</strong> Nitrato <strong>di</strong> Potassio od’Ammonio, e la gelatina esplosiva formata per oltre il 90% daNitroglicerina e la restante parte da Cotone Collo<strong>di</strong>o. Questi ultimi siannoverano tra i più pericolosi, in quanto i rischi sono connessisoprattutto al trasporto e alla lavorazione, essendo, infatti, laNitroglicerina, un materiale esplosivo molto suscettibile agli urti [2].Tali esplosivi hanno una densità molta variabile, usualmente simile aquella dell’acqua, ciò li rende tolleranti al contatto con l’acqua stessa,sebbene alcuni esplosivi commerciali non possono essere detonati incompleta immersione in acqua o in altri solventi. La detonazione avvienecon un singolo “blasting cap“ dato che l’innesco <strong>di</strong> un solo contenitore <strong>di</strong>materiale esplosivo può provocare la detonazione <strong>di</strong> altri a lui a<strong>di</strong>acente(Reazione a Catena) [2].Gli esplosivi commerciali non hanno una lunga vita utile, soprattutto seesposti per lunghi perio<strong>di</strong> ad elevate temperature, le quali possonoprovocare la fuoriuscita d’oli esplosivi o d’altri elementi. Molti <strong>di</strong> questiesplosivi, ed in particolar modo la Dinamite, emanano un forte odore,l’esposizione a tali vapori può causare rapidamente un’intensa emicraniadella durata <strong>di</strong> alcuni minuti.29
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEGli Esplosivi “Improvvisati, sono realizzati clandestinamente eartigianalmente, il loro potere <strong>di</strong>struttivo è funzione dei materialiimpiegati e delle abilità tecniche degli stessi produttori.Tali or<strong>di</strong>gni presentano notevoli <strong>di</strong>fficoltà, può, infatti, verificarsi unadetonazione prematura o incompleta, oltre che la fuoriuscita <strong>di</strong> un fortevapore acido che può corrodere il contenitore metallico dell’esplosivo odecomporsi quando esposto al calore. I contenitori degli esplosivimaggiormente utilizzati sono tubi d’acciaio o <strong>di</strong> plastica con entrambe leestremità tappate, solitamente <strong>di</strong> gran<strong>di</strong> <strong>di</strong>mensioni e per tanto faciliobiettivi delle tecniche d’ispezione, e per tale motivo sono usualmentenascosti negli scompartimenti <strong>di</strong> un veicolo [2].1.4 – Materiali EsplosiviI materiali esplosivi, utilizzati per la fabbricazione delle bombe sono <strong>di</strong>vario tipo. Questi possono essere <strong>di</strong>stinti tra cariche concentrate eallungate a seconda che siano ammassate in modo globulare o <strong>di</strong>sposte intubi esplosivi. Possono essere interne o esterne a seconda che siano<strong>di</strong>sposte in cavità realizzate nel corpo da far esplodere o semplicementeappoggiate su <strong>di</strong> essi. Si contrad<strong>di</strong>stinguono in funzione delle lorocaratteristiche chimiche, fisiche, del colore e dell’odore. Varianosoprattutto da un luogo all’altro in funzione della loro reperibilità.Alcune pubblicazioni scientifiche attestano che i migliori materialiesplosivi rintracciabili negli Stati Uniti sono la Polvere Nera, utilizzataper la produzione <strong>di</strong> bombe a tubo, la Dinamite, una miscela <strong>di</strong> Nitrato <strong>di</strong>Ammonio e Oli Combustibili (ANFO), l’esplosivo al plastico (C-4) e ilTNT, questi ultimi due utilizzati soprattutto per operazioni militari. I piùusati esplosivi artificiali sono esplosivi chimici, che normalmentecomprendono una rapida e violenta reazione d’ossidazione che produce30
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEuna notevole quantità <strong>di</strong> gas ad alta temperatura. Sono esplosivi moltoversatili, compatti, <strong>di</strong>sponibili in quantità e in ogni tipo.Le caratteristiche chimiche e fisiche dei materiali esplosivi incidonochiaramente sui loro vari impieghi, tra cui quelli militari e purtroppoanche quelli terroristici. Tali caratteristiche influenzano la scelta operatadai terroristi tra i vari materiali per la costruzione del proprio or<strong>di</strong>gno, alfine <strong>di</strong> sottrarsi ai normali controlli <strong>di</strong> sicurezza all’interno degliaeroporti o altri luoghi controllati dai metal detector, ed altri <strong>di</strong>spositivi<strong>di</strong> sorveglianza.Molti materiali esplosivi appaiono sotto forma <strong>di</strong> polvere bianca o nera,solitamente con una struttura <strong>di</strong> tipo cristallina, ma quando caricate nelcontenitore queste sono generalmente bagnate, al fine <strong>di</strong> evitareesplosioni premature, il che può chiaramente appesantirle e conferirgliuna configurazione pastosa.E’ possibile <strong>di</strong>stinguere <strong>di</strong>versi esplosivi utilizzati per la fabbricazione <strong>di</strong>bombe, tra cui Esplosivi Semplici, come il TNT (trinitrotulene), laNITROCELLULOSA e la NITROGLICERINA, ed Esplosivi Compostiquali la DINAMNITE, la POLVERE NERA, gli esplosivi plastici (C-4;SEMTEX) e l’ANFO [2].Esplosivi Semplici• Il TNT è il più comune tra gli esplosivi utilizzati per laproduzione d’armi militari, si presenta sotto forma <strong>di</strong> polverecristallina o a fiocchi, <strong>di</strong> colore variabile tra il giallo e il marroneacceso, se esposto all’ossigeno e ai raggi ultravioletti può subireuno scolorimento e una riduzione <strong>di</strong> stabilità all’impatto, data lasua composizione può essere sciolto per fargli assumere altre31
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEforme, è assolutamente inodore e può essere utilizzato comecomponente per molti altri esplosivi.• NITROCELLULOSA è un materiale altamente infiammabilecostituito da cellulosa e acido nitrico. È più stabile e brucia piùvelocemente della polvere nera emettendo gas molto cal<strong>di</strong>.Esplode quando innescata, ed è solitamente impiegata per laproduzione <strong>di</strong> propellente o più semplicemente per il lancio <strong>di</strong>proiettili in armi leggere; se asciutta è molto sensibile agliimpatti, all’attrito e alle scintille.• NITROGLICERINA è un esplosivo molto potente tra i maggiorielementi utilizzati per la produzione d’or<strong>di</strong>gni. Allo stato puro sipresenta come un liquido pesante <strong>di</strong> colore chiaro con la stessaconsistenza <strong>di</strong> un olio; può essere assorbita dal corpo me<strong>di</strong>anteinalazione o a contatto con la pelle inducendo stor<strong>di</strong>mento e forteemicrania, oltre ad emettere fumi molto tossici durante la suacombustione.• RDX, conosciuto anche come ciclonite, esogeno o T4. É unanitroammina, ed è un materiale esplosivo ampiamente usato daimilitari. Si presenta come un solido cristallino <strong>di</strong> colore bianco.E’ usato solitamente in miscele con altri esplosivi e plastificanti,oppure desensibilizzanti. È un esplosivo stabile e si puòconservare per molto tempo se immagazzinato bene. E’considerato il più potente tra tutti gli esplosivi militari. E’prodotto facendo reagire l'acido nitrico concentratosull'esammina, nitrato d’ammonio, acido acetico, ed anidride32
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEacetica. Comincia a decomporsi a circa 170°C, brucia piuttostoche esplodere, per farlo esplodere necessita <strong>di</strong> un detonatore, ed èmolto sensibile quando cristallizzato a temperature inferiore ai -4°C [4].Esplosivi Composti• DINAMITE è un esplosivo commerciale a <strong>di</strong>fferenza dei primitre, che sono invece d’uso militare, realizzata con materialeporoso imbevuto con Nitroglicerina ed avvolto in un foglio <strong>di</strong>cera, in un cartone o in una pellicola <strong>di</strong> plastica <strong>di</strong> colorevariabile secondo il produttore, solitamente confezionata comeun tubo <strong>di</strong> <strong>di</strong>verso <strong>di</strong>ametro. La Nitroglicerina impiegata per lasua realizzazione varia in percentuali comprese tra il 5% e il90%, conferendogli un forte odore che può provocare imme<strong>di</strong>atistor<strong>di</strong>menti; è solitamente innescata con una corda <strong>di</strong>detonazione o con un blasting cap.• POLVERE NERA è un esplosivo chimico tra i più vecchiconosciuti. Si realizza me<strong>di</strong>ante una miscela <strong>di</strong> polveri tra cuiNitrato <strong>di</strong> Potassio o Nitrato <strong>di</strong> So<strong>di</strong>o, Carbone <strong>di</strong> Legna e Zolfo.Il suo colore varia tra il nero e il marrone ed appare sottoforma <strong>di</strong>polvere sottile o granulare. E’ solitamente arricchita con dellagrafite che ha il compito <strong>di</strong> ridurre l’attrito tra i singoli granuliche potrebbe anche provocarne l’innesco accidentale, dato chequesto materiale risulta molto sensibile all’attrito oltre che alcalore, all’impatto e alle scintille, ciò fa <strong>di</strong> questo materialeesplosivo uno dei più pericolosi da maneggiare. Inoltre, risulta33
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEessere sensibile all’elettricità, pertanto deve essere lavorato conattrezzi <strong>di</strong> legno o <strong>di</strong> plastica a bassa conducibilità elettrica. Deveessere conservata asciutta data la sua sensibilità all’acqua eall’umi<strong>di</strong>tà che ne possono compromettere il corretto innesco.• C-4, noto anche come esplosivo al plastico per la suacomposizione e modalità d’applicazione, è anch’esso unesplosivo usato per scopi militari, in particolar modo come caricoper le demolizioni. E’ costituito da un materiale esplosivo (RDX)arricchito con degli ad<strong>di</strong>tivi che lo rendono simile ad uno stuccofacile da modellare. La peculiarità <strong>di</strong> quest’esplosivo èchiaramente la sua flessibilità che lo rende facile da modellare eda applicare su superfici irregolari, oltre che a un’elevata velocità<strong>di</strong> detonazione.• SEMTEX è un esplosivo plastico al pari del C-4 prodottooriginariamente nell’Europa dell’Est, è costituito da dueesplosivi il RDX e il PETN, arricchiti anch’essi con ad<strong>di</strong>tivi chelo rendono flessibile e malleabile, è assolutamente inodore ecaratterizzato da un colore che varia tra il giallo e il nero, presosingolarmente è un materiale relativamente innocuo che puòfacilmente essere manipolato. Per la sua detonazione si usasolitamente un blasting cap o una corda <strong>di</strong> detonazione. La suavita utile si aggira intorno ai 10 anni oltre i quali iniziano aperdere la sua flessibilità <strong>di</strong>ventando friabile o rigido.• ANFO è composto <strong>di</strong> una miscela <strong>di</strong> Nitrato d’Ammonio e OliCombustibili. Il Nitrato è solitamente <strong>di</strong> colore bianco, ha una34
CAPITOLO 1 – CARATTERIZZAZIONE DELL’ESPLOSIONEforma simile a quella <strong>di</strong> un fertilizzante ed è spesso imballato incontenitori impermeabili che servono ad evitare che possaperdere il suo potere e sensitività all’aumentare dell’umi<strong>di</strong>tà.Alcune variazioni si possono ottenere mescolando il Nitratod’Ammonio con Enitrometano o con lo Zolfo. Ha una densitàpari a circa l’85% <strong>di</strong> quella dell’acqua, non è sensibile alletemperature estreme e ciò nonostante deve essere tenuto asciuttoe non può quin<strong>di</strong> essere nascosto in acqua [4].Si riporta <strong>di</strong> seguito, una tabella illustrativa dei parametri d’alcuniesplosivi classici sopra elencati [3]:EsplosivoVolumespecificod’EsplosioneV [l/Kg]Calorespecificod’EsplosioneQ [Kcal/Kg]Temperaturad’EsplosioneT [°C]Velocità <strong>di</strong>DetonazioneD [m/s]Nitroglicerina 717 1470 4110 8000Esogeno 908 1500 3850 8300TNT 728 1000 2950 6800Fulminato <strong>di</strong>Mercurio304 368 4810 5400Dinamite (62%) 634 1200 4040 6600Tabella 1. 1 – Parametri che caratterizzano fisicamente alcuni materiali esplosivi35
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.Capitolo 2Descrizione <strong>di</strong> un test d’esplosione su una piastra in c.a.Oggetto della tesi è stata la modellazione numerica <strong>di</strong> una piastra in c.a.sottoposta all’azione <strong>di</strong> un carico <strong>di</strong>namico prodotto da un’esplosione.A tale fine, è stato necessario avvalersi dei risultati <strong>di</strong> una provasperimentale, condotta presso il <strong>Dipartimento</strong> d’Ingegneria Civile,Architettonica ed Ambientale, dell’Università del Missouri-Rolla (USA).Realizzata per opera degli Ingegneri Pedro F. Silva, Binggeng. Lu &Antonio Nanni [5].Nel caso specifico si tratta <strong>di</strong> una con<strong>di</strong>zione d’esplosione (blast), <strong>di</strong> cuisi vogliono descrivere gli effetti prodotti in termini <strong>di</strong> pressione,attraverso l’uso <strong>di</strong> una trattazione numerica <strong>di</strong> seguito riportata.Operando il confronto tra i risultati noti a priori del test sperimentale, equelli della modellazione numerica, si ha la possibilità <strong>di</strong> verificarel’accuratezza della simulazione, che sarà tanto più atten<strong>di</strong>bile, quantomaggiore sarà la fedeltà nella riproduzione della prova, e nelconseguimento <strong>di</strong> risultati simili a quelli ottenuti empiricamente.La simulazione numerica, è stata realizzata utilizzando il software <strong>di</strong>calcolo LS-DYNA Version 970 [11]. Il programma, è stato impiegato conil fine <strong>di</strong> implementare un metodo <strong>di</strong> calcolo numerico, per la<strong>di</strong>scretizzazione prima e la risoluzione analitica poi, dell’elementostrutturale.Tra i possibili meto<strong>di</strong> a <strong>di</strong>sposizione, si è scelto <strong>di</strong> implementare unMetodo Particellare <strong>di</strong> tipo Meshfree, in particolare lo SmoothedParticle Hydrodynamics (SPH) [7]. Utilizzando lo stesso software, si èpotuto ripetere la stessa simulazione, implementando un altro metodo <strong>di</strong>calcolo, il più tra<strong>di</strong>zionale Metodo degli Elementi Finiti (FEM) [6].36
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.In seguito, si è operato un confronto tra i risultati ottenuti, con i due<strong>di</strong>versi meto<strong>di</strong> impiegati, al fine <strong>di</strong> capire quale tra questi meglio sipresta per la modellazione <strong>di</strong> un elemento strutturale sottoposto a caricoda esplosione.2.1 – Descrizione della Prova SperimentaleIl test si è svolto sottoponendo all’azione <strong>di</strong> un carico <strong>di</strong>namico, unapiastra in calcestruzzo armato. La sollecitazione <strong>di</strong>namica è stataprodotta dalla detonazione <strong>di</strong> una carica esplosiva <strong>di</strong> peso W, sospesa inaria alla <strong>di</strong>stanza R dal centro dell’elemento. Il materiale esplosivoutilizzato è l’RDX (Esogeno), considerato tra i più potenti esplosivi d’usomilitare.Di seguito si descrivono:• Caratteristiche Geometriche della piastra in c.a.Le <strong>di</strong>mensioni in pianta sono 48x48 in (1,2x1,2 m), mentre lospessore è <strong>di</strong> 3,5 in (0,0875 m). Le armature metallichebi<strong>di</strong>rezionali, sono <strong>di</strong>sposte sul fondo della piastra, con copriferro<strong>di</strong> 0.5 in (0,0125 m). Le barre hanno sezioni trasversali <strong>di</strong> 0.11 in 2(φ9), e interasse <strong>di</strong> 6 in (0,15 m). Si ha quin<strong>di</strong> una percentualed’armatura in entrambi le <strong>di</strong>rezioni <strong>di</strong> 0,528%.• Con<strong>di</strong>zioni <strong>di</strong> vincolo;I campioni <strong>di</strong> prova sono stati appoggiati su due travi paralleled’acciaio, con sezione a doppia T, le cui flangie avevano unalarghezza <strong>di</strong> 6 in (0,15 m). Si possono osservare su entrambe letravi d’acciaio due file <strong>di</strong> spinotti metallici, a cui la piastra è stata37
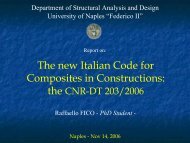
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.vincolata, e che formano in questo modo un incastro su entrambi ibor<strong>di</strong> esterni.y1,2Bφ9/15 cm0,15AA1,2xB0,15Sezione A-A ; B -B0,09Figura 2. 1 – Caratteristiche Geometriche della piastra, e dell’armatura metallica.9φ9Figura 2. 2 – Setup <strong>di</strong> Prova.38
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.Come si può notare, la piastra oltre ad essere geometricamentesimmetrica, rispetto ad una coppia <strong>di</strong> assi cartesiani con origine nelcentro, lo è anche nei confronti delle con<strong>di</strong>zioni <strong>di</strong> vincolo e <strong>di</strong> carico,essendo la carica esplosiva applicata nel centro della piastra, ed essendoquesta ultima semplicemente appoggiata su due lati.Di seguito si riportano, le proprietà dei materiali usati per la provasperimentale [5]:MaterialiStrain-rate [sec-1]Modulo <strong>di</strong>Elasticità <strong>di</strong>Young E [Kg/cm 2 ]Rapporto <strong>di</strong>Poisson νAcciaio 100 2,90E+07 0,3Calcestruzzo 100 3,78E+06 0,2Tabella 2. 1 – Proprietà elastiche dei materiali impiegati per la costruzione dellapiastra, allo Strain-Rate <strong>di</strong> 100 sec -1 .CalcestruzzoTensione <strong>di</strong>Rottura aCompressione[Kg/cm 2 ]Tensione <strong>di</strong>Rottura aTrazione [Kg/cm 2 ]DeformazioneUltima ε u [‰]717,13 195,8 4,76Tabella 2. 2 – Proprietà <strong>di</strong>namiche del calcestruzzo allo Strain-Rate <strong>di</strong> 100 sec -1 .AcciaioStrain-rate [sec-1]Tensione <strong>di</strong>Snervamento[Kg/cm 2 ]1,00E-04 3958,28174 5582,37Tabella 2. 3 – Tensione <strong>di</strong> Snervamento dell’acciaio, per due <strong>di</strong>versi valori <strong>di</strong> Strain-Rate.39
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.Mentre per il calcestruzzo sono fornite le sole proprietà <strong>di</strong>namiche(Strain-Rate <strong>di</strong> 100 sec -1 ), per l’acciaio, si fa <strong>di</strong>stinzione tra la tensione<strong>di</strong> snervamento calcolata per con<strong>di</strong>zioni <strong>di</strong> carico quasi statiche (Strain-Rate 1,00E-04 sec -1 ), e per le con<strong>di</strong>zioni <strong>di</strong> carico <strong>di</strong>namiche (Strain-Rate 174 sec -1 ). Da questi dati si nota un incremento della tensione <strong>di</strong>snervamento del materiale, all’aumentare della velocità <strong>di</strong> deformazioneε [sec -1 ], mentre il modulo <strong>di</strong> elasticità si mantiene costante.Note le caratteristiche meccaniche del calcestruzzo per con<strong>di</strong>zioni <strong>di</strong>carico <strong>di</strong>namiche, sono state da queste derivate le stesse caratteristiche incon<strong>di</strong>zioni quasi statiche. Utilizzando la formulazione proposta dalbollettino CEB-FIP Model Code 1990 [20].Ottenendo i seguenti risultati:MaterialiModulod’Elasticità <strong>di</strong>Young E[Kg/cm 2 ]Modulod’ElasticitàTangenziale G[Kg/cm 2 ]Calcestruzzo 179843,71 74934,88CalcestruzzoTensione <strong>di</strong>Rottura aCompressione[Kg/cm 2 ]Tensione <strong>di</strong>Rottura aTrazione[Kg/cm 2 ]212,65 28,67Tabella 2. 4 – Proprietà del calcestruzzo, per velocità <strong>di</strong> deformazione quasi statica.40
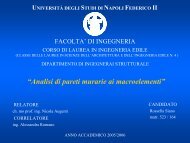
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.2.2 – Evidenze SperimentaliSi riportano ora i risultati delle prove eseguite, in termini <strong>di</strong> dannoprodotto [5]:TestPeso della caricaesplosiva RDX.W [Kg]Distanza dellacarica dalcentro dellapiastra. R [m]Livello <strong>di</strong> Dannoprodotto1 0,10 0,91 I (No Cracking)2 0,50 0,91 II (Minor Cracking)3 0,90 0,30 III (Major Cracking)4 1,71 0,20 IV (Severe Damage)Tabella 2. 5 – Con<strong>di</strong>zioni <strong>di</strong> carico ed Evidenze Sperimentali ad esse associate.Dalle evidenze sperimentali si evince, che all’aumentare dell’entità delcarico, e contemporaneamente al ridursi della <strong>di</strong>stanza tra la piastra e ilcentro d’esplosione, si osservano danni crescenti in termini <strong>di</strong>fessurazione, fino a giungere alla con<strong>di</strong>zione <strong>di</strong> rottura dell’elemento.Nelle immagini successive, sono raffigurati i risultati delle prove 3 e 4:Figura 2. 3 – Immagine della piastra in seguito alla terza Prova.41
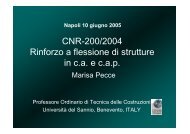
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.Figura 2. 4 – Immagini della piastra in seguito alla quarta Prova.Si osserva che:• Al seguito della prima prova non si riscontrano danni percepibili;• Nel secondo caso si osservano piccole lesioni d’entità in ognimodo non apprezzabili;• Nel terzo caso la piastra presenta fessure rilevanti. Il quadrofessurativo che si presenta in questo caso è caratterizzato dalesioni ra<strong>di</strong>ali, che dal centro della piastra, ovviamentemaggiormente sollecitata perché nelle imme<strong>di</strong>ate vicinanze dellacarica esplosiva, si estendono verso i bor<strong>di</strong> della stessa, conampiezze decrescenti linearmente. La lesione maggiore nel centrodella piastra misura un’ampiezza <strong>di</strong> circa 3 mm. La deformazionedell’elemento strutturale è data dalla somma <strong>di</strong> due aliquote, unadeformazione elastica e una plastica. La deformazione plastica simanifesta me<strong>di</strong>ante uno spostamento residuo, che si può misurareal termine della prova. La piastra presenta nel centro unabbassamento residuo <strong>di</strong> 21 mm, e <strong>di</strong> 11 mm in prossimità dellamezzeria del bordo esterno.• Nella quarta ed ultima prova, aumentando il carico esplosivo eriducendo ulteriormente la <strong>di</strong>stanza della carica esplosiva dal42
CAPITOLO 2 - DESCRIZIONE DI UN TEST D’ESPLOSIONE SU UNA PIASTRA IN C.A.centro della piastra, si provoca la rottura della stessa, così comemostrato nella precedente immagine.2.3 – Finalità della Prova SperimentaleIl test <strong>di</strong> prova è stato condotto con l’intenzione <strong>di</strong> verificare la vali<strong>di</strong>tàdel metodo DBD (Displacement Based Design method), usato nelvalutare la <strong>di</strong>mensione del carico esplosivo W, e la <strong>di</strong>stanza <strong>di</strong> tolleranzaR, tali da produrre un livello <strong>di</strong> danno stabilito a priori [5].Oggetto della ricerca era l’in<strong>di</strong>viduazione <strong>di</strong> uno strumento utile neldeterminare, entro un grado <strong>di</strong> precisione ragionevole, il livello <strong>di</strong>vulnerabilità delle strutture esistenti. Inoltre, nel modellare un’esplosioneè <strong>di</strong> fondamentale importanza definire un livello <strong>di</strong> danno tollerabile. Glieffetti prodotti da un’esplosione possono variare dal danno minore finoal completo collasso della struttura, con le conseguenti e considerevoliper<strong>di</strong>te <strong>di</strong> vite umane. Questo programma <strong>di</strong> ricerca ha mostrato risultatipromettenti nell’impiego del metodo per pre<strong>di</strong>re il blast load (caricoesplosivo), in termini <strong>di</strong> <strong>di</strong>stanza e peso della carica esplosiva <strong>di</strong>sicurezza.Le evidenze sperimentali hanno mostrato che i livelli <strong>di</strong> danno realizzatierano simili ai valori predetti.Dato che le finalità della prova sperimentale e della tesi <strong>di</strong>fferiscono traloro, si preferisce omettere la descrizione del metodo DBD, non essendoquesto <strong>di</strong> nostro interesse. Sarà quin<strong>di</strong> sufficiente avvalersi dei dati deitest eseguiti e dei risultati da loro conseguiti, da utilizzare per lamodellazione degli stessi.43
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONECapitolo 3Modellazione delle azioni prodotte dall’esplosione.Al fine <strong>di</strong> valutare le azioni prodotte sulla superficie della piastradall’esplosione, sarà necessario definire per ogni prova, la curva <strong>di</strong>pressione a cui la piastra sarà sottoposta.La curva <strong>di</strong> pressione definisce al variare del tempo, in un dato puntodello spazio alla <strong>di</strong>stanza ridotta Z dal centro della carica, l’andamentodella pressione generata dall’esplosione. Di questa curva <strong>di</strong> carico, èpossibile <strong>di</strong>stinguere una fase positiva ed una negativa. La fase positiva èdovuta all’incremento <strong>di</strong> pressione rispetto alla normale pressioneatmosferica, mentre quella negativa si deve ad una depressione, in virtùdel ritorno verso il centro <strong>di</strong> esplosione dell’aria che è stata spostata [3].Nella modellazione effettuata dagli autori della prova sperimentale,l’onda <strong>di</strong> pressione è stata semplificata con una curva <strong>di</strong> caricotriangolare. I parametri principali richiesti per definire la blast load sonoil Picco <strong>di</strong> Pressione ΔPs, e la durata dell'impulso <strong>di</strong> blast td, o duratadella fase positiva. Assumendo nullo il tempo d’arrivo t a del fronted’onda sulla superficie piana, l’andamento qualitativo della curva <strong>di</strong>pressione sarà come mostrato nella successiva immagine [5]:PΔPstdtFigura 3. 1 – Curva <strong>di</strong> Pressione semplificata, usata dagli autori per la modellazionedella prova.44
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONESemplici espressioni possono essere usate per riferire ΔP s e t d al pesodella carica esplosiva e alla <strong>di</strong>stanza, in<strong>di</strong>cate rispettivamente con W e R.Il picco <strong>di</strong> pressione ΔP s , è valutato come una funzione inversamenteproporzionale della <strong>di</strong>stanza ridotta Z, secondo la formulazione propostada H.L. Brode [5].Al variare del campo <strong>di</strong> vali<strong>di</strong>tà, ΔP s sarà definito come:Δp(Z ) =Δp(Z ) =6,72+ 1 Δp≥ 10Kg/ cm3Z0,975 1,455 5,85+ + − 0,0192 3Z Z Z0,1 ≤ Δp≤ 10Kg/ cm2Dove, la <strong>di</strong>stanza ridotta Z si esprime in funzione <strong>di</strong> R e W così comesegue:Z =R3WLa durata della fase positiva, o impulso dell’esplosione t d , si definiscesempre in funzione <strong>di</strong> R ed W, a partire dalle seguenti funzionilogaritmiche [5]:log⎛ t ⎞⎛ ⎞10 ⎜ dR⎟ ≅ − 2,75 + 1,95 ⋅ log310 ⎜ ⎟ Z ≤3⎝ W ⎠⎝ W ⎠01,0logt d⎛ ⎞⎛ R ⎞10 ⎜ ⎟ ≅ − 2,75 + 0,27 ⋅ log310 ⎜ ⎟ Z ≥3⎝ W ⎠⎝ W ⎠1,La curva <strong>di</strong> pressione così calcolata nel solo centro della piastra, è poiestesa all’intera superficie <strong>di</strong> carico.45
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONENella nostra modellazione, sia il picco <strong>di</strong> pressione sia la durata dellafase positiva sono stati valutati in maniera <strong>di</strong>versa. Per la definizione <strong>di</strong>una curva <strong>di</strong> pressione, che si avvicini quanto più verosimilmente alladescrizione del reale fenomeno fisico provocato dall’esplosione, si èpreferito seguire un <strong>di</strong>verso metodo analitico, la cui trattazione teorica èstata esplicitata nel Capitolo 1.3.1 – Curva <strong>di</strong> pressione adottataEssendo la piastra simmetrica, sia geometricamente, che per quantoconcerne le con<strong>di</strong>zioni <strong>di</strong> vincolo e <strong>di</strong> carico, sarà sufficiente definire lacurva <strong>di</strong> pressione per un solo quarto della piastra.Per conseguire una maggiore accuratezza nella modellazione della prova,la piastra viene <strong>di</strong>scretizzata in un numero finito d’elementi, d’ugualicaratteristiche fisiche, geometriche e meccaniche. Si sud<strong>di</strong>viderà quin<strong>di</strong>,la superficie <strong>di</strong> carico della piastra in elementi <strong>di</strong> <strong>di</strong>mensione 10x10 cm,sia lungo l’asse x sia y, del sistema <strong>di</strong> riferimento cartesiano introdotto.yFEDCBAABCDEF123456654321123456654321xF E D C B A A B C D E FFigura 3. 2 – Discretizzazione della superficie <strong>di</strong> carico.46
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONELimitando il calcolo al solo quadrante positivo del sistema <strong>di</strong> riferimentoscelto, <strong>di</strong> origine coincidente con il baricentro della piastra, si definisceuna curva <strong>di</strong> pressione per ogni superficie elementare. Data la<strong>di</strong>scretizzazione adottata, e le <strong>di</strong>mensioni dei singoli elementi, saranno36 le curve <strong>di</strong> pressione da definire, per un totale <strong>di</strong> 144 curve <strong>di</strong> caricoper ognuna delle 4 prove sperimentali. Questa semplificazione, è resapossibile dalla simmetria d’applicazione del carico esplosivo, essendoquesto centrato rispetto al baricentro della piastra stessa. Inoltre, lapropagazione dell’onda <strong>di</strong> sovrapressione avviene in maniera sferica dalcentro d’esplosione, essendo questo sollevato rispetto alla piastra e nonostacolato se non dalla piastra stessa, che n’è investita. La pressione suisingoli elementi, e in un dato istante <strong>di</strong> tempo, sarà quin<strong>di</strong> una funzionedella sola <strong>di</strong>stanza effettiva dal centro d’esplosione. La curva <strong>di</strong>pressione quin<strong>di</strong> si ripete identicamente sulle superfici <strong>di</strong> 4 elementisimmetrici rispetto al centro della piastra.Si descrive in seguito le operazioni successive, che si è scelto <strong>di</strong> adottareper definire la curva <strong>di</strong> pressione prodotta dall’esplosione, facendoriferimento all’i-esimo elemento <strong>di</strong> <strong>di</strong>mensioni finite, in cui è statasud<strong>di</strong>visa l’area <strong>di</strong> carico.Coefficiente d’equivalenzaNel considerare il peso della carica esplosiva è necessario introdurre uncoefficiente d’equivalenza che consente <strong>di</strong> esprimere il peso della caricaesplosiva, usata nella prova sperimentale, in funzione del TNT(Trinitrotulene). L’esigenza <strong>di</strong> equiparare il peso <strong>di</strong> una qualunque caricaesplosiva al TNT, nasce dalla necessità <strong>di</strong> impiegare formule empirichenel calcolo della curva <strong>di</strong> pressione, ricavate attraverso prove47
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONEsperimentali in cui il TNT è stato usato come materiale esplosivo <strong>di</strong>riferimento.Il coefficiente d’equivalenza q è dato dal rapporto tra i Calori Specificid’Esplosione Q w , dei due materiali [3].Qq =QRDXTNTDal coefficiente d’equivalenza si definisce il peso equivalente in TNTdella carica esplosiva usata nel test sperimentale:W= q ⋅TNTW RDXNel caso specifico si avrà:Caratteristiche dell'esplosivoQwEsplosivo[Kcal/Kg]RDX 1500TNT 1000Coefficiente d’equivalenzaq 1,5Tabella 3. 1 – Calore specifico degli esplosivi e Coefficiente d’Equivalenza.Ciò significa che, gli effetti prodotti da 1 Kg <strong>di</strong> RDX sono equivalenti aquelli prodotti da 1,5 Kg <strong>di</strong> TNT.Distanza Ridotta ZNoti i pesi equivalenti della carica esplosiva W TNT e le <strong>di</strong>stanze effettivetra il centro d’esplosione e quello della superficie dell’i-esimo elementoR i , è possibile calcolare la Distanza Ridotta Z i d’ogni elemento come [3].48
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONEZ =i3WRiTNTDove la <strong>di</strong>stanza effettiva dal centro d’esplosione R i è così definita:2Ri= a +b2iCosì come si può semplicemente dedurre dalla seguente immagine, incui si rappresenta la pianta e la sezione <strong>di</strong> un quarto <strong>di</strong> piastra, e l’iesimoelemento a lei appartenente:yPianta della piastraA B C D E F123i4bi5WSezione Trasversale6xRiaFigura 3. 3 – Distanza effettiva dell’i-esimo elemento dal centro d’esplosione.49
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONEPicco <strong>di</strong> Pressione Δp(Z)In funzione delle Distanze Ridotte, si definisce il picco <strong>di</strong> pressioneΔp(Z), per ogni prova sperimentale e per singolo elemento in cui lapiastra è stata in precedenza <strong>di</strong>scretizzata.Si è scelto <strong>di</strong> definire Δp(Z) come la me<strong>di</strong>a dei valori forniti dalle varieformulazioni in precedenza esposte (Brode H.L. Henrich J.; PetrowskyG.I.; Sadowsky M.A.) [3], al variare della <strong>di</strong>stanza ridotta, e quin<strong>di</strong> delrelativo campo <strong>di</strong> vali<strong>di</strong>tà, a <strong>di</strong>fferenza <strong>di</strong> quanto fatto nella definizionedella curva <strong>di</strong> pressione semplificata, in cui si è scelto <strong>di</strong> adottare unasola delle precedenti formulazioni.Coefficiente Sperimentale α.Per definire la Curva <strong>di</strong> Pressione, è necessario esprimere in funzionedella <strong>di</strong>stanza ridotta Z, un coefficiente <strong>di</strong> natura sperimentale α.Tale coefficiente si può trovare tabellato [3], in funzione però <strong>di</strong> solialcuni valori <strong>di</strong> Z. Me<strong>di</strong>ante un’operazione d’estrapolazione, dai valorinoti del coefficiente, è stato possibile ricavare una funzione <strong>di</strong> Z, che ciconsentiva <strong>di</strong> trovare i <strong>di</strong>versi valori <strong>di</strong> α al variare della <strong>di</strong>stanza ridotta.50
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONEEstrapolazioney = 2,651x -0,7694R 2 = 0,95393,532,5α21,5αPotenza (a)10,500 20 40 60ZGrafico 3. 1 - Estrapolazione numerica del coefficiente sperimentale α.Durata della Fase Positiva t +È l’intervallo <strong>di</strong> tempo entro cui si annulla la sovrapressione prodottadall’esplosione nell’aria circostante. L’espressione usata per la suadefinizione è la seguente [3]:t + 3= B ⋅ 10 − 6W TNTR iAllo stesso modo <strong>di</strong> quanto visto nella definizione della curva <strong>di</strong>pressione semplificata, anche in questo caso la durata della fase positivasi esprime in funzione <strong>di</strong> W e <strong>di</strong> R, ma attraverso una più sempliceespressione semiempirica.51
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONECurva <strong>di</strong> Pressione P(Z, t)La curva <strong>di</strong> pressione non è altro che l’andamento della pressioneprodotta dall’esplosione in un dato istante <strong>di</strong> tempo t, e ad una certa<strong>di</strong>stanza ridotta Z. Analiticamente l’andamento della pressione puòessere calcolato come segue [3]:p ( Z,t )t⎛ t − αt= Δ ( ) 1 −pZ⎜⎝⎞+⎟ et ⎠+Fissata la <strong>di</strong>stanza ridotta Z, da cui <strong>di</strong>pendono il picco <strong>di</strong> pressioneΔp(Z), e il coefficiente sperimentale α, attraverso quest’espressione siottiene la curva <strong>di</strong> pressione al variare del tempo. Essendo Z a sua voltafunzione della <strong>di</strong>stanza effettiva dal centro d’esplosione R, al variare <strong>di</strong>questa otteniamo <strong>di</strong>versi valori <strong>di</strong> Z, e quin<strong>di</strong> <strong>di</strong>verse curve <strong>di</strong> pressione.Ragion per cui sarà necessaria definire per ogni elemento della piastrauna curva <strong>di</strong> pressione <strong>di</strong>versa.Quin<strong>di</strong>, per semplicità d’esposizione si riportano <strong>di</strong> seguito i risultaticonseguiti nella definizione <strong>di</strong> una singola curva <strong>di</strong> pressione, inparticolare quella calcolata nel centro della piastra. Essendo, infatti, ilcentro della superficie superiore della piastra, il punto più vicino alcentro d’esplosione, sarà anche quello maggiormente sollecitato.DATIPROVA1 2 3 4a (m) 0,91 0,91 0,30 0,20b i (m) 0,000 0,000 0,000 0,000R i (m) 0,91 0,91 0,30 0,20WRDX (Kg) 0,10 0,50 0,90 1,71WTNT (Kg) 0,15 0,75 1,35 2,57Z i 1,71 1,00 0,27 0,15Tabella 3. 2 - Distanza Effettiva Ri, Carico Equivalente W TNT , Distanza Ridotta Zi.52
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONEAutoreBrode H.L.Henrich J.PetrowskyG.I.SadowskyM.A.Δp(Z)[Kg/cm 2 ]PROVA1 2 3 4Campo <strong>di</strong> vali<strong>di</strong>tà2,33 7,67 336,00 2149,19 Δp>10 Kg/cm 22,21 8,23 315,82 1950,47 0,1
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONEt (ms)Curva <strong>di</strong> pressione calcolata nel centro della piastra.Prova 1 Prova 2 Prova 3 Prova 4P(Z,t)[Kg/cm 2 ] P(Z,t)[Kg/cm 2 ] P(Z,t)[Kg/cm 2 ] P(Z,t)[Kg/cm 2 ]0,00 2,41 8,66 326,77 1944,620,05 2,07 7,41 187,77 778,800,10 1,77 6,33 107,34 309,940,15 1,51 5,40 61,00 122,430,20 1,28 4,59 34,42 47,930,25 1,08 3,90 19,26 18,560,30 0,90 3,30 10,67 7,090,35 0,75 2,78 5,84 2,660,40 0,62 2,34 3,14 0,980,45 0,51 1,95 1,66 0,350,50 0,41 1,63 0,85 0,120,55 0,33 1,35 0,42 0,040,60 0,25 1,11 0,19 0,010,65 0,19 0,91 0,08 0,000,70 0,14 0,73 0,02 0,000,75 0,10 0,59 0,00 0,000,80 0,06 0,47 -0,01 0,000,85 0,03 0,36 -0,01 0,000,90 0,00 0,27 -0,01 0,000,95 -0,02 0,20 -0,01 0,001,00 -0,04 0,14 -0,01 0,001,05 -0,05 0,09 0,00 0,001,10 -0,06 0,05 0,00 0,001,15 -0,07 0,02 0,00 0,001,20 -0,08 -0,01 0,00 0,001,25 -0,08 -0,03 0,00 0,001,30 -0,09 -0,05 0,00 0,001,35 -0,09 -0,06 0,00 0,001,40 -0,09 -0,07 0,00 0,001,45 -0,09 -0,08 0,00 0,001,50 -0,09 -0,08 0,00 0,001,60 -0,08 -0,08 0,00 0,001,70 -0,08 -0,08 0,00 0,001,80 -0,07 -0,08 0,00 0,001,90 -0,07 -0,07 0,00 0,002,05 -0,06 -0,06 0,00 0,002,20 -0,05 -0,05 0,00 0,002,35 -0,04 -0,04 0,00 0,002,50 -0,03 -0,04 0,00 0,002,65 -0,03 -0,03 0,00 0,002,80 -0,02 -0,02 0,00 0,003,00 -0,02 -0,02 0,00 0,003,20 -0,01 -0,01 0,00 0,003,40 -0,01 -0,01 0,00 0,003,60 -0,01 -0,01 0,00 0,003,80 0,00 0,00 0,00 0,00Tabella 3. 6 - Curve <strong>di</strong> Pressione P(Z, t), calcolate per le quattro prove sperimentali.54
CAPITOLO 3 – MODELLAZIONE DELLE AZIONI PRODOTTE DALL’ESPLOSIONENel definire l’andamento della pressione al variare del tempo, si trascuraper semplicità <strong>di</strong> calcolo, la determinazione del tempo d’arrivo t a ,essendo irrilevante rispetto all’intera durata della curva <strong>di</strong> pressione. Iltempo d’arrivo si definisce come il tempo impiegato dal fronte d’onda a<strong>di</strong>mpattare contro la superficie superiore della piastra. In realtà le curve <strong>di</strong>pressione dovrebbero essere traslate <strong>di</strong> una quantità pari a t a lungo l’assedelle ascisse.Il metodo sopra esposto sarà impiegato nella definizione delle curve <strong>di</strong>pressione, per ogni singolo elemento della piastra, al variare della<strong>di</strong>stanza effettiva tra il centro d’esplosione e il baricentro dell’elemento,e per ognuna delle quattro prove sperimentali <strong>di</strong> cui si conoscono i datiiniziali.Di seguito si riportano le curve <strong>di</strong> pressione calcolate nel centro dellapiastra, e per ogni prova sperimentale.55
Curva delle Pressioni Prova_13P(Z , t)t⎛ t −α+= Δ −tp(Z ) 1 e⎜⎝⎞+⎟t ⎠256P [Kg/cm 2 ]1Prova_100,00 0,15 0,30 0,45 0,60 0,75 0,90 1,05 1,20 1,35 1,50 1,65 1,80 1,95 2,10 2,25 2,40 2,55 2,70 2,85 3,00 3,15 3,30 3,45 3,60 3,75 3,90-1t [ms]
Curva delle Pressioni Prova_210987P(Z , t)t⎛ t −α+= Δ −tp(Z ) ⎜1⎝⎞+ ⎟et ⎠657P [Kg/cm 2 ]5432100,00 0,15 0,30 0,45 0,60 0,75 0,90 1,05 1,20 1,35 1,50 1,65 1,80 1,95 2,10 2,25 2,40 2,55 2,70 2,85 3,00 3,15 3,30 3,45 3,60 3,75 3,90-1t [ms]
Curva delle Pressioni Prova_3330310290270250P(Z , t)t⎛ t −α+= Δ −tp(Z ) 1 e⎜⎝⎞+⎟t ⎠23021019058170P [Kg/cm 2 ]1501301109070503010-10 0,00 0,15 0,30 0,45 0,60 0,75 0,90 1,05 1,20 1,35 1,50 1,65 1,80 1,95 2,10 2,25 2,40 2,55 2,70 2,85 3,00 3,15 3,30 3,45 3,60 3,75 3,90t [ms]
Curva delle Pressioni Prova_4185017001550P(Z , t)t⎛ t −α+= Δ −tp(Z ) ⎜1⎝⎞+⎟et ⎠14001250110059P [Kg/cm 2 ]950800650500350200500,00 0,15 0,30 0,45 0,60 0,75 0,90 1,05 1,20 1,35 1,50 1,65 1,80 1,95 2,10 2,25 2,40 2,55 2,70 2,85 3,00 3,15 3,30 3,45 3,60 3,75 3,90-100t [ms]
CAPITOLO 4 – METODI DI DISCRETIZZAZIONECapitolo 4Meto<strong>di</strong> <strong>di</strong> DiscretizzazioneI meto<strong>di</strong> <strong>di</strong> <strong>di</strong>scretizzazione che si sono scelti <strong>di</strong> impiegare per lasimulazione numerica, sono il Finite Element Method (FEM) e loSmoothed Particle Hydrodynamics (SPH). Al termine dellamodellazione, avendo utilizzato entrambi i meto<strong>di</strong> per le stesse provesperimentali, si avrà la possibilità <strong>di</strong> operare uno stu<strong>di</strong>o parametrico tra idue. Si potrà capire quale tra questi meglio si presta per la modellazionenumerica <strong>di</strong> un elemento strutturale sottoposto a carichi da esplosione.Questo capitolo è de<strong>di</strong>cato ad una breve descrizione del più noto edutilizzato FEM, a prescindere dal quale non sarebbe possibile introdurre iMeshfree Particle Methods. Infatti, questi ultimi sono stati sviluppati conl’intento <strong>di</strong> estendere i primi, ampliandone il raggio d’applicazione, erendendoli più versatili.In seguito si de<strong>di</strong>cheranno maggiori attenzioni ai Meshfree ParticleMethods, facendo riferimento in particolare allo Smoothed ParticleHydrodynamics (SPH), impiegato nella modellazione.4.1 – Finite Element Method (FEM)Sin dalla sua invenzione, risalente alla metà del secolo scorso, il metododegli elementi finiti (FEM), è stato largamente impiegato per lecomputazioni numeriche nell’ambito ingegneristico [6].Il FEM rientra tra i meto<strong>di</strong> approssimati per la risoluzione delleequazioni fondamentali della statica e della <strong>di</strong>namica.La sua principale caratteristica risiede nella possibilità <strong>di</strong> sud<strong>di</strong>videre uncontinuo in un numero <strong>di</strong>screto d’elementi, che non si sovrappongono60
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEnel dominio <strong>di</strong> nostro interesse. Tale operazione è così detta <strong>di</strong>Discretizzazione del continuo in Elementi Finiti.I singoli elementi sono vincolati tra loro da una mappa topologica,definita Mesh (Maglia), sopra la quale sono costruite le funzioni <strong>di</strong>interpolazione [6].Ad ogni elemento in cui il continuo è stato sud<strong>di</strong>viso, vanno associatedelle funzioni spostamento me<strong>di</strong>ante il vettore spostamento così definito:{ x,y,z t}s = s ,Questi vettori sono definiti attraverso la funzione <strong>di</strong> spostamento deisingoli no<strong>di</strong> [6]:s( x,y,z,t)( x,y,z,t)( x,y,z,t)( x,y,z,t)⎧u⎫⎪⎪= ⎨v⎬ = N⎪⎪⎩w⎭[ ]{} ΔDove [N] è la matrice delle funzioni <strong>di</strong> forma, questa lega glispostamenti generici all’interno dell’i-esimo elemento agli spostamentidei no<strong>di</strong> {Δ}, che lo in<strong>di</strong>viduano nello spazio. Le funzioni <strong>di</strong> forma sonoin numero pari al numero <strong>di</strong> no<strong>di</strong> della Mesh, e per definizione valgono 1se calcolate nel nodo a cui si riferiscono, e 0 negli altri no<strong>di</strong>dell’elemento i-esimo. Le funzioni <strong>di</strong> forma hanno un ruolofondamentale nel metodo d’analisi, in quanto rappresentano il polinomioche approssima il valore esatto degli spostamenti, e determinano quin<strong>di</strong>la convergenza del metodo [6].La Mesh assicura la compatibilità delle interpolazioni, sebbene nonsempre le con<strong>di</strong>zioni <strong>di</strong> compatibilità numerica coincidono con quellefisiche del continuo stesso.61
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEIn oltre, quando uno stesso corpo presenta caratteristiche locali <strong>di</strong>verse, ogeometrie complesse, è necessario sud<strong>di</strong>viderlo in un numero moltoelevato <strong>di</strong> elementi finiti, realizzando quin<strong>di</strong> una maglia sempre più fitta,ed aumentando l’onere <strong>di</strong> computazione.Il FEM è quin<strong>di</strong> un metodo limitato, che necessità <strong>di</strong> mo<strong>di</strong>fiche eadeguamenti tra i suoi limiti si annoverano [6]:• La compatibilità numerica è sola un’approssimazione della realecompatibilità fisica del continuo. Questa approssimazione nonsempre risulta essere precisa ed accurata. Basti pensare adun’eccessiva <strong>di</strong>storsione della Mesh, che può provare il terminedella computazione o in ogni modo un errore rilevante nellastessa;• Campi d’interpolazione d’elevati or<strong>di</strong>ni <strong>di</strong> grandezza sono <strong>di</strong>fficilida riprodurre per domini con geometrie arbitrarie epluri<strong>di</strong>mensionali. Ciò comporta una restrizione nell’applicare imeto<strong>di</strong> <strong>di</strong> computazione basati sugli elementi finiti, per larisoluzione <strong>di</strong> problemi pratici, come ad esempio per lasimulazione <strong>di</strong> Plates e Shell (Piatti e Gusci), con alti gra<strong>di</strong>entid’elasticità e plasticità;• Quando s’impiegano contemporaneamente Mesh <strong>di</strong>fferenti per lasimulazione numerica <strong>di</strong> uno stesso fenomeno fisico, è possibileottenere modelli <strong>di</strong>fferenti <strong>di</strong> <strong>di</strong>sintegrazione per uno stessomateriale. Tale fenomeno è noto come “suscettibilità” del FEMnei confronti della rottura graduale del materiale;62
CAPITOLO 4 – METODI DI DISCRETIZZAZIONE• In alcune applicazioni, la Mesh stessa può essere fonte <strong>di</strong> <strong>di</strong>sturbonella computazione numerica. Un esempio ben noto è lasimulazione del problema <strong>di</strong> localizzazione degli sforzi;• Questi Meto<strong>di</strong> tra<strong>di</strong>zionali, presentano notevoli <strong>di</strong>fficoltàd’applicazione per problemi che presentano deformabilità deivincoli, superfici in<strong>di</strong>pendenti, o interfacce in movimento;• Le funzioni <strong>di</strong> spostamento non sempre assicurano la continuitàdegli spostamenti richiesta tra gli elementi a<strong>di</strong>acenti, può esserequin<strong>di</strong> violata la con<strong>di</strong>zione <strong>di</strong> congruenza.Per questi ed altri motivi l’operazione <strong>di</strong> <strong>di</strong>scretizzazione con il metododegli elementi finiti, non sempre risulta essere vantaggiosa nellecomputazioni numeriche.Si rende quin<strong>di</strong> necessario un adeguamento del FEM, o almeno unaricerca <strong>di</strong> meto<strong>di</strong> alternativi da utilizzare in particolari applicazioni.Una prima soluzione è stata in<strong>di</strong>viduata nello sviluppo del così detto“Arbitrary Lagrangian Eulerian” (ALE).L’obiettivo <strong>di</strong> tale formulazione risiede nel rendere in<strong>di</strong>pendente lecaratteristiche del materiale dalla Mesh, così che la sua <strong>di</strong>storsione puòessere minimizzata.Purtroppo, in alcune formulazioni con l’ALE, quali ad esempiomodellazioni <strong>di</strong> flui<strong>di</strong> o <strong>di</strong> gran<strong>di</strong> deformazioni del continuo, la<strong>di</strong>storsione della maglia è ancora presente, e ciò provoca errori nellacomputazione numerica.Inoltre, gli effetti <strong>di</strong> trasporto convettivi in ALE, spesso conducono adoscillazioni spurie che hanno bisogno <strong>di</strong> essere stabilizzate da una<strong>di</strong>ffusione artificiale o una stabilizzazione <strong>di</strong> Petrov-Galerkin.63
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEPer superare le <strong>di</strong>fficoltà e i limiti sopra elencati, sarà quin<strong>di</strong> necessariotrovare un nuovo metodo <strong>di</strong> <strong>di</strong>scretizzazione del continuo.E’ in questa ottica che nascono i Meshfree Particle Methods (Meto<strong>di</strong> <strong>di</strong>Discretizzazione Particellari), con l’obiettivo <strong>di</strong> superare i limiti deimeto<strong>di</strong> FEM.I Meshfree Particle Methods, in quanto meto<strong>di</strong> numerici, presentanoalcune caratteristiche in comune con altri meto<strong>di</strong> numerici, quali il giàcitato Metodo degli Elementi Finiti, o il Metodo delle Differenze Finite.Tuttavia si <strong>di</strong>fferenziano gli uni dagli altri in virtù dei processid’implementazione.Attraverso questi meto<strong>di</strong>, è computazionalmente efficace e fisicamenteaccurato, <strong>di</strong>scretizzare un continuo attraverso un set <strong>di</strong> punti nodali, oparticelle <strong>di</strong>stribuite nello spazio in maniera del tutto arbitraria, senza inpratica costrizioni <strong>di</strong> maglia, che provveda alla loro connessione.I vantaggi <strong>di</strong> tali meto<strong>di</strong> possono essere così elencati [7].• E’ possibile trattare facilmente gran<strong>di</strong> deformazioni, essendo leconnessioni tra i no<strong>di</strong> generate come una parte dellacomputazione stessa, che può subire variazioni nel tempo;• Il metodo interpreta facilmente il danno degli elementi delmodello, tale capacità si <strong>di</strong>mostra molto utile per la modellazionedella rottura graduale;• I no<strong>di</strong> possono essere aggiunti piuttosto facilmente, cosi com’èpossibile realizzare mo<strong>di</strong>fiche delle caratteristiche geometrichedel continuo modellato;• E’ possibile usare modelli pluri-<strong>di</strong>mensionali del continuo, al fine<strong>di</strong> modellare gran<strong>di</strong> deformazioni <strong>di</strong> strutture a guscio sottili, comei nanotubi;64
CAPITOLO 4 – METODI DI DISCRETIZZAZIONE• Me<strong>di</strong>ante la <strong>di</strong>scretizzazione Meshfree si possono rappresentareoggetti geometrici tri<strong>di</strong>mensionali.4.2 – Classificazione dei Meto<strong>di</strong> ParticellariI meto<strong>di</strong> particellari possono essere classificati in conformità a due<strong>di</strong>fferenti criteri, principi fisici o formulazioni computazionali.Sulla base dei principi fisici, questi possono essere sud<strong>di</strong>visi in due<strong>di</strong>fferenti classi: quelli basati su modelli probabilistici, e su modellideterministici [7].In base alle formulazioni computazionali si possono sud<strong>di</strong>videre in due<strong>di</strong>verse tipologie, a seconda che servono come approssimazione dellaStrong Form o della Weak Form, delle equazioni <strong>di</strong>fferenziali parziali(PDE) [7].Per approssimare la Strong Form dell’equazione <strong>di</strong>fferenziale parziale,questa viene solitamente <strong>di</strong>scretizzata da una tecnica <strong>di</strong> collocazionespecifica, quale ad esempio lo Smoothed Particle Hydrodynamics (SPH),il Vortex Method, il metodo generalizzato delle <strong>di</strong>fferenze finite, ed altriancora.Sia l’SPH sia il Vortex Method, furono sviluppati inizialmente comemeto<strong>di</strong> probabilistici, mentre attualmente per alcune applicazionivengono impiegati come meto<strong>di</strong> deterministici.Ciononostante, la maggior parte dei meto<strong>di</strong> particellari appartenenti aquesta categoria, sono basati su principi probabilistici, o usati comestrumenti <strong>di</strong> simulazioni probabilistiche.Gli Strong Form Methods sono semplici da implementare, efficienti dalpunto <strong>di</strong> vista computazionale, e non necessitano <strong>di</strong> alcuna integrazionenella definizione del sistema <strong>di</strong>screto <strong>di</strong> equazioni da risolvere. Tuttavia,65
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEspesso sono instabili e poco precisi, specialmente quando si <strong>di</strong>scretizzal’elemento in un insieme <strong>di</strong> no<strong>di</strong> <strong>di</strong>stribuiti in maniera irregolare.In questa categoria è possibile <strong>di</strong>stinguere tre meto<strong>di</strong> principali: leDinamiche Molecolari, la simulazione <strong>di</strong>retta <strong>di</strong> Monte Carlo (DSMC), eil Lattice Gas Automaton (LGA), da cui deriva il Lattice BoltzmannEquation Method (LBE) [7].Questo ultimo, è un esempio <strong>di</strong> come non tutti i meto<strong>di</strong> particellaripossono essere considerati meto<strong>di</strong> Meshfree. In quanto il LBE richiedeper la sua applicazione la definizione <strong>di</strong> una griglia, la cui funzione èassimilabile a quella <strong>di</strong> una maglia.Alla seconda classe <strong>di</strong> meto<strong>di</strong> particellari appartengono i GalerkinMethods. Questi sono usati per l’approssimazione della Weak Form dellaPDE; tra cui il Metodo degli Elementi Diffusi (DEM), Element FreeGalerkin Methods (EFGM), Reproducing Kernel Particle Methods(RKPM), Metodo <strong>di</strong> partizione dell’unità (Partition of Unity Method),Meshless local Petrov-Galerkin Method (MLPG), ed altri ancora [7].I Weak Form Methods, sono stabili e molto precisi, tuttavia richiedonouna conoscenza sia complessiva sia locale, della Mesh realizzata, per larisoluzione del modello, per tanto non sono considerati dei veri e propriMeshfree Methods [7].A questa classificazione esistono delle eccezioni, in quanto alcunimeto<strong>di</strong> particellari possono essere usati in ambo le posizioni, quella <strong>di</strong>forma forte, così come per la <strong>di</strong>scretizzazione della forma debole. Unesempio è il Particle-in-Cell (PIC). Per tale metodo, infatti, è possibile<strong>di</strong>stinguere due versioni, una per la Strong Form, e l’altra per la WeakForm.Per semplicità d’esposizione si riporta la seguente tabella grafica:66
Meshfree ParticleMethodsCriteri <strong>di</strong> classificazionePrincipi FisiciFormulazioni ComputazionaliMeto<strong>di</strong>DeterministiciMeto<strong>di</strong>ProbabilisticiPDEStrong FormPDEWeak FormGalerkin MethodsSmoothed Particle Hydrodynamics (SPH)Vortex MethodIl Metodo Generalizzato delle Differenze FiniteLe Dinamiche MolecolariLa Simulazione Diretta <strong>di</strong> Monte Carlo (DSMC)Lattice Gas Automaton (LGA)Metodo degli Elementi Diffusi (DEM)Element Free Galerkin Method (EFGM)Reproducing Kernel Particle Methods (RKPM)Partition of Unity MethodMeshless local Petrov-Galerkin Method (MLPG)Tabella 4. 1 - Classificazione dei Meto<strong>di</strong> Particellari67
CAPITOLO 4 – METODI DI DISCRETIZZAZIONE4.3 – Applicazione dei Meto<strong>di</strong> ParticellariIn ambiti quali l’astrofisica, la biofisica, la biochimica e la biome<strong>di</strong>ca, èfacile imbattersi in corpi che possono essere modellati non comecontinui, bensì come insiemi <strong>di</strong> particelle.In questi casi, i meto<strong>di</strong> particellari rappresentano una scelta naturale perla simulazione numerica.Esempi rilevanti sono le simulazioni <strong>di</strong> fenomeni quali la formazione <strong>di</strong>sistemi stellari, movimenti <strong>di</strong> milioni d’atomi in uno stato <strong>di</strong> nonequilibrio, ed interazioni <strong>di</strong>namiche <strong>di</strong> varie molecole.In questo momento, i meto<strong>di</strong> particellari non sono quin<strong>di</strong> impiegati solocome meto<strong>di</strong> <strong>di</strong> <strong>di</strong>scretizzazione, per la soluzione <strong>di</strong> problemi delcontinuo tri<strong>di</strong>mensionale, come l’SPH, il Vortex Method, e i GalerkinMeshfree Methods, ma anche come modelli per la descrizione deicomportamenti fisici del continuo [7].Gli ultimi esempi sono l’impiego del Lattice Boltzmann EquationMethod (LBE), per la risoluzione <strong>di</strong> problemi <strong>di</strong> fluido-meccanica, e ilMolecular Dynamics, per risolvere problemi inerenti alla meccanicadella frattura [7].I meto<strong>di</strong> Meshfree Galerkin, sono largamente impiegati per larisoluzione <strong>di</strong> problemi nell’ambito della meccanica dei corpi soli<strong>di</strong>. Traquesti la simulazione della rottura graduale, da molti ritenuta una dellepiù ostiche computazioni nell’ambito della meccanica della frattura. Intal senso, i meto<strong>di</strong> Meshfree offrono notevoli vantaggi rispetto aitra<strong>di</strong>zionali meto<strong>di</strong> degli elementi finiti. Per tale applicazione, infatti, sirende necessaria un’operazione detta <strong>di</strong> Remeshing, in altre parole <strong>di</strong>ricostruzione della maglia in seguito alla rottura. Questa operazione puòessere invece evitata utilizzando un metodo Meshfree, quale il Galerkino anche il Metodo <strong>di</strong> partizione dell’unità [7].68
CAPITOLO 4 – METODI DI DISCRETIZZAZIONETra gli altri, il Meshless Local Petrov-Galerkin (MLPG), sviluppato nel1998 dagli stu<strong>di</strong>osi Atluri e Zhu [7], risulta essere quello maggiormenteimpiegato per l’analisi <strong>di</strong> travi e strutture placcate, non essendo, infatti,necessaria una conoscenza complessiva della Mesh creata per il modello,ma è sufficiente una conoscenza locale del modello stesso.Un'altra applicazione in cui si preferisce usare un metodo <strong>di</strong><strong>di</strong>scretizzazione <strong>di</strong> tipo Meshfree, rispetto ai tra<strong>di</strong>zionali meto<strong>di</strong> deglielementi finiti, è la modellazione della localizzazione degli sforzi. Èpossibile <strong>di</strong>mostrare, infatti, che i meto<strong>di</strong> Meshfree hanno la capacità <strong>di</strong>sostenere gran<strong>di</strong> <strong>di</strong>storsioni della maglia. Questo perché non c’è uncoinvolgimento <strong>di</strong>retto della maglia nella simulazione.Invece, utilizzando il metodo FEM, avremmo un incremento della banda<strong>di</strong> taglio lungo l’i-esimo elemento vincolato, che compromette lasimulazione del reale comportamento fisico dell’elemento stesso.La maglia in pratica non è più in grado <strong>di</strong> seguire, per gran<strong>di</strong>deformazioni, l’andamento reale del continuo, sotto l’azione dei carichiesterni.4.4 – Smoothed Particle Hydrodynamics (SPH)Tra i <strong>di</strong>versi meto<strong>di</strong> particellari <strong>di</strong> tipo Meshfree, ai fini dellamodellazione numerica, si è scelto <strong>di</strong> focalizzare l’attenzione sul metodoSPH.Lo Smoothed Particle Hydrodynamics, è uno dei principali meto<strong>di</strong>particellari impiegati nella meccanica computazionale.Tale metodo fu formulato nell’1977 simultaneamente da Lucy, Gingold& Monaghan, al fine <strong>di</strong> descrivere alcuni fenomeni Astrofisici, tra cui laformazione, l’evoluzione, e il collasso delle stelle, delle galassie, finoalla “Modellazione dell’intero Universo” [7].69
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEIl movimento collettivo <strong>di</strong> questo insieme <strong>di</strong> particelle, è, infatti,assimilabile a quello <strong>di</strong> un liquido o <strong>di</strong> un flusso <strong>di</strong> gas, può quin<strong>di</strong>essere modellato utilizzando le equazioni che governano l’Idro<strong>di</strong>namicaClassica <strong>di</strong> Newton.L’SPH, fu ampiamente adottato come un efficiente tecnicacomputazionale, per la risoluzione <strong>di</strong> problemi <strong>di</strong> meccanica applicata,tra cui la fluido-<strong>di</strong>namica, e l’ idro<strong>di</strong>namica classica.Al contrario <strong>di</strong> un convenzionale metodo <strong>di</strong> <strong>di</strong>scretizzazione, chesud<strong>di</strong>vide un sistema continuo in un numero <strong>di</strong>screto <strong>di</strong> elementi finiti,l’SPH unifica un numero <strong>di</strong>screto <strong>di</strong> particelle, accomunate dalle stessecaratteristiche, quali massa e volume, generando così un campo continuolocale, con il fine <strong>di</strong> rappresentare il comportamento collettivo <strong>di</strong> unsistema <strong>di</strong>screto [7].Basti pensare alle prime applicazioni in Astrofisica e nella MeccanicaQuantistica, dove il sistema fisico reale a già per se <strong>di</strong>screto. In tal senso,l’SPH può essere considerato come un Metodo Particellare, basato suuna tecnica <strong>di</strong> omogeneizzazione.La principale assunzione su cui si fonda il metodo SPH è che il valore <strong>di</strong>una funzione f ad un certo punto i può essere approssimato moltiplicandola stessa funzione per una funzione d’omogeneizzazione W (Kernelfunction), <strong>di</strong> ampiezza h, ed integrando sul dominio computazionale nelmodo seguente [9]:fi∫= f ( x ) Wi( x )dxdove f i = f(x i ), mentre W i (x) = W (x−x i , h) è la funzioned’omogeneizzazione. Questa integrazione avviene su un dominiocostituito da un insieme <strong>di</strong> particelle, il cui volume elementare è definito70
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEdal rapporto tra la massa e la propria densità. E’ quin<strong>di</strong> necessariodefinire una Kernel Function W(x, h), in<strong>di</strong>viduando le coor<strong>di</strong>nate delnucleo W, rispetto ad un generico sistema <strong>di</strong> riferimento cartesiano, e ilperiodo d’omogeneizzazione h (Smoothing Lenght). Di solito, neltra<strong>di</strong>zionale metodo SPH, si presume che la funzioned’omogeneizzazione sod<strong>di</strong>sfi la con<strong>di</strong>zione <strong>di</strong> normalizzazione nelproprio dominio <strong>di</strong> pertinenza:∫W( x − x , h ) dx =i1In ogni modo, è facile <strong>di</strong>mostrare che questa con<strong>di</strong>zione <strong>di</strong>normalizzazione per la funzione d’omogeneizzazione è valida solo per ipunti interni al dominio, ma non è sod<strong>di</strong>sfatta per i punti <strong>di</strong> confine.L’equazione precedente viene <strong>di</strong>scretizzata come segue:fi=mNj⎜j = 1 ρj∑⎛⎝⎞⎟⎠fjWijDove W ij = W(x j - x i , h), m j e ρ j sono rispettivamente la massa e ladensità <strong>di</strong> massa della j-esima particella, il rapporto tra questi due è ilvolume elementare associato alla particella stessa, N è il numero totale <strong>di</strong>particelle in cui si è <strong>di</strong>scretizzato il continuo.Tale funzione sarà poi impiegata per approssimare la strong form <strong>di</strong> unequazione <strong>di</strong>fferenziale parziale (PDE), attraverso una complessaintegrazione.Con il metodo tra<strong>di</strong>zionale SPH tale approssimazione sarà:71
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEfxi∫= f ( x ) Wiixdxconsiderando la proprietà della funzione nucleo:∫W iixdx=0L’equazione può essere riscritta come:[ f ( x ) f ( x ] W dxfxi= ∫ −i)Le approssimazioni particellari delle derivate parziali possono quin<strong>di</strong>essere scritte come:ixfi= ∑⎛mNj⎜j = 1 ρj⎝⎞⎟⎠[ f ( xj) − f ( xi)] ∇iWijIl valore numerico <strong>di</strong> una funzione f e le sue derivate parziali, possonoessere quin<strong>di</strong> ottenuti con una funzione kernel su un insieme <strong>di</strong> particellepiuttosto che su una maglia. Questa è l'essenza del metodo tra<strong>di</strong>zionaleSPH.4.4.1 – Meto<strong>di</strong> d’interpolazione SPHEssendo l’SPH un metodo Meshfree, l’interpolazione è costruita su uninsieme <strong>di</strong> punti nodali, in<strong>di</strong>pendenti tra loro e non vincolati da nessunamaglia o griglia.Questa operazione d’interpolazione è basata sul seguente concetto [7]:' '( x) ( x − x ) A( x ) d 'A = ∫ δ Ω ∀x ∈ ΩnRx72
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEdove δ(x) è la funzione Dirac Delta, definita a sua volte come il limitedella seguente funzione δ ε (x) [7].δ ( x ) = lim0 ε →δε( x )con:δε⎧ 0 ;x < − ε / 2⎪( x ) = lim ⎨ 1 / ε ; − ε / 2 < x < εε → 0 ⎪⎩ 0 ;x > ε / 2/2⎫⎪⎬⎪⎭La funzione Dirac Delta, non può però essere impiegata né per unprocesso d’interpolazione, né tanto meno per un processo <strong>di</strong>collocazione, questo perché è una funzione <strong>di</strong> tipo generalizzata, in altreparole affetta da alcune patologie. Inoltre, manca d’alcune proprietàfondamentali, non essendo né continua né derivabile nel proprio dominio<strong>di</strong> definizione.Per superare tali inconvenienti, s’introduce uno Smooth Kernel W(x, h)(Nucleo omogeneo), al fine <strong>di</strong> utilizzare la funzione Dirac Delta perprocessi d’interpolazione e collocazione.L’SPH è quin<strong>di</strong> un operatore <strong>di</strong> me<strong>di</strong>a (Average Operator), definito nelseguente modo [7]:'( x ) >= W ( x − x' , h ) A( x ) d '< A ∫ΩdRxEd approssimato come:N≈ ∑i = 1W( x − xI, h ) A ( xI) Δ VI73
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEDove la notazione < … > in<strong>di</strong>ca l’operatore <strong>di</strong> me<strong>di</strong>a, mentre h, comeabbiamo già detto, è la Smoothing Lenght, in altre parole l’ampiezza operiodo d’omogeneizzazione, infine ΔV I è il volume elementare dell’iesimaparticella.Assumendo che il continuo ha una densità <strong>di</strong> massa <strong>di</strong>stribuitauniformemente, possiamo <strong>di</strong>viderlo in un numero <strong>di</strong>screto d’elementivolumetrici, cui associa una massa m I . Ogni elemento volumetrico conmassa può essere attribuito ad una particolare particella.Per cui avremo [7]:Δ VI=mρIIDove con ρ I in<strong>di</strong>chiamo la densità <strong>di</strong> massa dell’i-esima particella.E’ possibile notare, che l’operatore <strong>di</strong> me<strong>di</strong>a , è una funzionedella variabile spaziale x, infatti, può essere visto come unarappresentazione non locale <strong>di</strong> A(x).La funzione Kernel deve sod<strong>di</strong>sfare le seguenti proprietà [7]:W∫RWW3( xW( x( x, h ) ≥ 0( x , h ) d Ω, h ) → δk, h ) ∈ C0x( x )= 1;h→ 0d( R ) ; k ≥ 1La seconda proprietà è la cosiddetta con<strong>di</strong>zione <strong>di</strong> normalizzazione,insieme alla terza sono proprietà comuni alla funzione Dirac Delta.La terza proprietà assicura la convergenza del metodo, l'ultima derivadal requisito che la funzione deve essere derivabile più <strong>di</strong> una volta.74
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEIl vantaggio <strong>di</strong> usare un nucleo analitico, risiede nella possibilità <strong>di</strong>valutare una Kernel Function in un qualsiasi punto dello spazio, senzaconoscere la <strong>di</strong>stribuzione locale delle particelle.La rappresentazione a nucleo non solo consente <strong>di</strong> compiere una<strong>di</strong>scretizzazione uniforme <strong>di</strong> un equazione <strong>di</strong>fferenziale parziale, mafornisce anche uno schema interpolante per un insieme <strong>di</strong> particelle inmovimento.Con l’SPH è quin<strong>di</strong> possibile trattare un corpo solido al pari <strong>di</strong> un fluidoviscoso, cioè come un insieme <strong>di</strong> particelle, <strong>di</strong> assegnata massa evolume, in<strong>di</strong>pendenti le une dalle altre.Sfruttando tali caratteristiche, questo metodo può essere impiegato per larisoluzione <strong>di</strong> problemi <strong>di</strong> natura meccanica.Ad esempio, Libersky applicando questo metodo ai soli<strong>di</strong> meccanici, èriuscito a simulare in 3D alcuni fenomeni, tra cui l’esplosione <strong>di</strong> unabomba, problemi <strong>di</strong> frammentazione, impatto e penetrazione <strong>di</strong> soli<strong>di</strong>.La simulazione d’impatti e penetrazioni con l’ausilio dell’SPH, sonostate eseguite anche da Johnson, il quale impiega tale metodo per lamodellazione <strong>di</strong> problemi inelastici, <strong>di</strong> danno e <strong>di</strong> gran<strong>di</strong> deformazioni.E’ possibile <strong>di</strong>stinguere <strong>di</strong>verse funzioni Kernel, che sonocomunemente impiegate nelle computazioni. Ad esempio, la KernelFunction può essere una funzione positiva <strong>di</strong> tipo Gaussiana, cosìdefinita [7]:W2( 1 ⎡ xx , h ) = expn / 2 ⎢ −⎣ h21 ≤ n ≤ 32( π h )⎤⎥ ,⎦75
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEDove n è la <strong>di</strong>mensione dello spazio in cui la funzione è definita, x è lacoor<strong>di</strong>nata rispetto ad un generico sistema <strong>di</strong> riferimento cartesianodell’i-esima particella, ed h è la Smoothing Lenght.Altri esempi <strong>di</strong> Kernel Function sono la funzione <strong>di</strong> Spline cubica equartica, <strong>di</strong> seguito definite [7]:Cubic Spline FunctionW( x , h )=Chn⎧⎪1 −⎪ 1⎨⎪ 4⎪ 0⎩3 / 2 q2( 2 − q )3+3/4 q; in3;0 ≤ q ≤ 1⎫⎪⎪;1 ≤ q ≤ 2 ⎬⎪altri casi ⎪⎭Dove q = x/h; mentre C è il fattore <strong>di</strong> normalizzazione, che assumevalori <strong>di</strong>versi in funzione della <strong>di</strong>mensione dello spazio in cui è definitala funzione:C=⎧ 2 / 3⎪⎨ 10 / 7π⎪⎩1 / π; d; d; d= 1 ⎫⎪= 2 ⎬= 3 ⎪⎭Quartic Spline FunctionW( x , h )=Chn⎧1⎨⎩−06 q2+8 q3−3 q4;0
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEVe<strong>di</strong>amo come si sceglie l’ampiezza d’omogeneizzazione h (SmoothingLength).Fissata l’ampiezza d’omogeneizzazione h, questa definisce una regioneche limita la maggior parte della funzione Kernel. La precisionedell’interpolazione <strong>di</strong>pende dal numero <strong>di</strong>screto <strong>di</strong> particelle contenuteentro questa regione. La scelta della Smoothing Length è <strong>di</strong>fondamentale importanza nell’implementazione al computer del metodoSPH. Tale scelta, è solitamente operata in funzione della precisioned’interpolazione che si vuole conseguire. Per una data precisione delcalcolo, infatti, è fissato il numero <strong>di</strong> particelle contenute nella regionedefinita da h. In realtà, non è possibile determinare univocamentel’ampiezza d’omogeneizzazione h, in quanto in una simulazione<strong>di</strong>namica, la densità <strong>di</strong> particelle contenute in detta regione varia alvariare del tempo. Per tanto, affinché si mantenga costante la precisionenumerica e l’efficienza della computazione, la Smoothing Lenghtdovrebbe variare anch’esso nel tempo.Per fare questo, è necessario scegliere una funzione Kernel <strong>di</strong> tipoGaussiana, e assumere che ogni particella abbia approssimativamente lastessa massa Δm [7].Si deve quin<strong>di</strong> assumere che:∑I ∈ Λ∑J∈Λ2( x − x )⎪⎧jexp ⎨ −2⎪⎩hi⎪⎫⎬ = γ = cos t⎪⎭Una volta scelta la massa da attribuire ad ogni singola particella Δm, invirtù dell’interpolazione SPH, potremo scrivere quanto segue:< ρ >= ∑∑I∈ΛJ ∈ Λ1exp/d 2 d( π h )⎪⎧⎨ −⎪⎩( x − x )jh2i2⎪⎫⎬⎪⎭( Δ m )2=γπ( Δ m )d/ 2hd277
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEDove, con i pe<strong>di</strong>ci i e j s’in<strong>di</strong>cano le generiche particelle appartenenti aldomino Λ, d è la <strong>di</strong>mensione del dominio, e x i e x j le posizioni dellegeneriche particelle rispetto all’origine del sistema cartesiano.Da quest’ultima relazione possiamo quin<strong>di</strong> trarre la seguenteconclusione [7]:h ∝1 / < ρ >1/ dSe tutte le particelle contenute nel dominio Λ hanno quin<strong>di</strong> la stessaquantità <strong>di</strong> massa Δm, e la stessa ampiezza d’omogeneizzazione h,questa ultima dovrà quin<strong>di</strong> essere proporzionale al reciprocodell’inverso della densità me<strong>di</strong>a delle particelle.Questo perché, la Smoothing Lenght è proporzionale al volumeelementare ΔV i dell’i-esima particella, e quin<strong>di</strong> alla <strong>di</strong>stanza <strong>di</strong>separazione tra le particelle stesse.4.4.2 – Teoria d’Approssimazione SPHEssendo l’SPH un metodo <strong>di</strong> computazione numerico, in quanto tale èfondato su un insieme <strong>di</strong> principi e regole <strong>di</strong> approssimazione. Queste,sono le cosiddette regole <strong>di</strong> Monaghan, e rappresentano le linee guidaper <strong>di</strong>scretizzare un equazione <strong>di</strong>fferenziale [7].Si possono <strong>di</strong>stinguere quattro <strong>di</strong>verse regole d’approssimazione,proposte dallo stesso Monaghan. La prima <strong>di</strong> queste, è quella secondocui è sempre meglio scegliere come funzione Kernel una funzione <strong>di</strong> tipoGaussiana. Tra le varie funzioni Kernel, quella Gaussiana è la migliorenell’analizzare la coerenza fisica <strong>di</strong> un modello realizzato in SPH.78
CAPITOLO 4 – METODI DI DISCRETIZZAZIONELa seconda regola d’approssimazione, è che l’insieme del prodotto <strong>di</strong>due funzioni, può essere approssimato dal prodotto degli insiemiin<strong>di</strong>viduali:(2)< A ⋅ B >=< A > ⋅ < B>Dove, A e B sono due funzioni, mentre è l’operatore <strong>di</strong> me<strong>di</strong>a(Average Operator).La terza regola d’approssimazione è la seguente:(3)< ∇A>= ∇ < A >ed è valida per ogni campo scalare A.La quarta regola <strong>di</strong> approssimazione, non è altri che una proprietà dellaterza regola sopra citata, ovvero:(4)< ∇A>= ∇ < A > − A < ∇W>Quando la funzione Kernel è limitata, il secondo termine del secondomembro della precedente equazione si annulla. Infatti, sfruttando la terzaregola d’approssimazione (3), possiamo scrivere:< ∇W>≈ ∇ < W>essendo:W ( x,h)= ∑W( x −j∈Λxj, h)ΔVjIn virtù della seconda proprietà della funzione Kernel, sostituendo siavrà:∇< W>≈ ∇( 1) =079
CAPITOLO 4 – METODI DI DISCRETIZZAZIONE4.4.3 – Approssimazione <strong>di</strong> Derivate SPHL’SPH viene impiegato per approssimare la Strong Form <strong>di</strong> unequazione <strong>di</strong>fferenzia parziale. Al contrario del metodo delle <strong>di</strong>fferenzefinite, che per <strong>di</strong>scretizzare un equazione <strong>di</strong>fferenziale parziale, impiegauna griglia, l’SPH, essendo un metodo particellare <strong>di</strong> tipo Meshfree,<strong>di</strong>scretizza la PDE sulla base delle sopra citate regole <strong>di</strong>approssimazione.Si possono <strong>di</strong>stinguere tre <strong>di</strong>verse formule gra<strong>di</strong>enti, perl’approssimazione <strong>di</strong> un equazione <strong>di</strong>fferenziale parziale [7].Formula gra<strong>di</strong>ente IUna formula d’approssimazione <strong>di</strong>retta, impiegando un metodod’interpolazione SPH, può essere la seguente:∇∑( x − x , h ) A Δ V ( )A ( x ) = ∇ WII ∈ ΛIIIUn’approssimazione così <strong>di</strong>retta è solitamente poco accurata, e spesso<strong>di</strong>strugge la proprietà <strong>di</strong> conservazione del sistema continuo associato.Quando l’approssimazione è combinata con un termine ad<strong>di</strong>zionale, checontiene un’espressione nulla del tipo = 0, questo puòprodurre un migliore risultato.Dalla regola d’approssimazione (3) <strong>di</strong> Monaghan, si ricava la formulaapprossimata del gra<strong>di</strong>ente per un campo scalare A(x i ) come:∇A ( xI)=∑j∈ Λ( AJ− AI) ∇ WI , JΔ Vj80
CAPITOLO 4 – METODI DI DISCRETIZZAZIONELa stessa approssimazione è valida anche per un campo vettoriale A:∇⋅A ( xI)=∑j∈ Λ( AJ− AI) ⋅ ∇ WI , JΔ VjFormula gra<strong>di</strong>ente IINella formulazione in SPH, la densità è una grandezza <strong>di</strong> fondamentaleimportanza. La densità <strong>di</strong> massa, infatti, stabilisce una correlazione chesussiste tra la massa e il volume <strong>di</strong> una singola particella.ρI=mIΔ VIPer conseguire una precisione maggiore nella formulazione del gra<strong>di</strong>ented’approssimazione della PDE, è preferibile scrivere il gra<strong>di</strong>ente delcampo scalare e del campo vettoriale come segue:∇⋅A=[ ∇ ⋅ ( ρ A ) − A ⋅ ∇ ρ ]/ρ∇A=[ ∇ ( ρ A ) − A ∇ ρ ]/ρNella prima espressione A è un operatore scalare, nella seconda unoperatore vettoriale.Quin<strong>di</strong>, il gra<strong>di</strong>ente dell’interpolazione in SPH, può essere approssimatonel seguente modo:ρII=∑J ∈ Λ( A − A ) ∇ W m ( IIJIIIJj)81
CAPITOLO 4 – METODI DI DISCRETIZZAZIONERispetto alla prima formulazione non si fa nient’altro che esprimere ilvolume dell’i-esima particella in funzione della sua densità <strong>di</strong> massa, edella massa stessa.Una simile formulazione può essere impiegata per approssimare ilgra<strong>di</strong>ente del campo vettoriale A, facendo <strong>di</strong>stinzione tra i prodottiscalari, tensoriali, e vettoriali tra l’operatore gra<strong>di</strong>ente e il campovettoriale:scalare→ ρI< ∇ ⋅ A >I= −∑J ∈ ΛAIJ⋅ ∇IWIJmjtensoriale→ ρII=−∑J ∈ Λ∇IWIJ⊗AIJmjvettoriale→ ρII=∑J ∈ ΛAIJ×∇IWIJmjFormula gra<strong>di</strong>ente IIINonostante le precedenti formule d’approssimazione del gra<strong>di</strong>ente sianosufficientemente accettabili, queste sono in ogni modo affette da unadeficienza comune. Queste formulazioni, infatti, non sono simmetricherispetto agli in<strong>di</strong>ci I e J dell’operatore A. Per ottenereun’approssimazione simmetrica del gra<strong>di</strong>ente, è necessario introdurreuna nuova regola d’approssimazione. Introduciamo quin<strong>di</strong> la successivaidentità:∇ Aρ=Aρσ⎛∇ ⎜⎝1ρ⎞⎟⎠+1ρ⎛ A∇ ⎜⎝ ρ1 − σ2 − σσ − 1⎞⎟⎠82
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEDove σ è un numero intero. In base a questa identità è possibile scriverela seguente regola <strong>di</strong> approssimazione SPH:⎛ ∇ A⎜⎝ ρ⎞⎟⎠I=∑j∈ Λ⎛⎜⎝ρAJ2 − σIρσJ+ρσIAρI2 − σJ⎞⎟∇⎠IWIJmjA seconda che il parametro σ assumerà valore pari a 1 o 2, avremo leseguenti formule d’approssimazione del gra<strong>di</strong>ente, sia per il camposcalare sia per quello vettoriale.Quando σ = 1, per il campo scalare A(x) avremo:< ∇ A >I= ∑J ∈ Λ( A + A ) ∇ W Δ V ( IIIaIJIIJJ)Mentre, per il prodotto scalare tra l’operatore gra<strong>di</strong>ente e il campovettoriale A, si avrà:< ∇ ⋅ A >I= ∑J ∈ Λ(AI+AJ)⋅ ∇IWIJΔ VJQuando invece σ = 2, per il campo scalare A(x) avremo:I=∑J ∈ ΛAj AI+ ) ∇ W m ( IIIb2 I IJ Jρ ρ(2j I)Mentre, per il prodotto scalare tra l’operatore gra<strong>di</strong>ente e il campovettoriale A, si avrà:∇ ⋅ AA A< >I= ∑)ρJ ∈ Λj I( +2 2ρjρI⋅ ∇IWIJmJ83
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEL’SPH non è solo uno schema <strong>di</strong> interpolazione, ma fornisce anche uninsieme <strong>di</strong> regole <strong>di</strong> approssimazione, che consentono <strong>di</strong> costruire unsistema <strong>di</strong>namico <strong>di</strong>screto del continuo.Prima <strong>di</strong> capire come usare queste regole d’approssimazione, ènecessario descrivere le leggi <strong>di</strong> conservazione nella meccanica delcontinuo.Queste sono [7]:• Equazione <strong>di</strong> Continuitàd ρdt+ ρ ∇ ⋅ v=0Dove ρ è la densità <strong>di</strong> massa, e v il campo vettoriale delle velocità.• Equazione del Motodvdt=−1∇ρ⋅ σDove σ è la tensione <strong>di</strong> Cauchy.• Equazione dell’EnergiadEdt1= − σ :ρ∇vDove E è l’energia specifica interna, somma dell’energia Potenziale e <strong>di</strong>quella Cinetica.Esistono <strong>di</strong>versi mo<strong>di</strong> per scrivere un’equazione <strong>di</strong>fferenziale in SPH,utilizzando le regole d’approssimazione, da impiegare in seguito nellapratica computazionale, tra cui l’equazione <strong>di</strong> Continuità, del Moto e84
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEdell’Energia, che serviranno per descrivere l’evoluzione nel tempo delcontino <strong>di</strong>scretizzato in SPH [7].Equazione <strong>di</strong> continuità in SPHL’equazione <strong>di</strong> continuità SPH impiegata nella computazione, è ricavatada <strong>di</strong>fferenti regole d’approssimazione.Dall’equazione <strong>di</strong> continuità sopra in<strong>di</strong>cata, introducendo l’operatoreme<strong>di</strong>o () si ottiene quanto segue:d ρ< >= − < ρ ∇ ⋅ v >dtUtilizzando nell’or<strong>di</strong>ne le regole d’approssimazione 2, 3 e 4, inprecedenza elencate, il secondo membro dell’equazione <strong>di</strong> continuità puòessere scritto come:≈−regola2≈−∇⋅regola3≈−∇⋅+ ρ v ⋅regola4Sapendo che:∇⋅ < v< ∇ W>=>=N∑j = 1N∑J = 1mρmρjjjjv∇j∇IIWWIJIJSostituendole nell’equazione <strong>di</strong> continuità, scritta con le regole <strong>di</strong>approssimazione, si avrà:85
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEd ρIdtmNj= ρI ∑j = 1 ρj( vI− vJ) ⋅ ∇IWIJQuella appena scritta altri non è che l’equazione <strong>di</strong>fferenziale <strong>di</strong>continuità <strong>di</strong>scretizzata come un equazione algebrica.Si è visto come, utilizzando le regole d’approssimazione dell’SPH, siapossibile <strong>di</strong>scretizzare un equazione <strong>di</strong>fferenziale, in una più sempliceequazione algebrica.Equazione del Moto in SPHPer descrivere l’evoluzione <strong>di</strong> un sistema utilizzando l’SPH, è necessarioriscrivere le equazioni del moto in una forma <strong>di</strong>scretizzata.In funzione del tipo <strong>di</strong> regola d’approssimazione del gra<strong>di</strong>ente, impiegataper la <strong>di</strong>scretizzazione dell’equazione <strong>di</strong>fferenziale del moto, si possono<strong>di</strong>stinguere tre <strong>di</strong>verse equazioni del moto in SPH, usate nella pratica.Infatti, dalla seguente equazione del moto:dv< ρ >= − < ∇ ⋅ σdt>( 0 )Dove, ρ è la densità <strong>di</strong> massa dell’i-esima particella, v è il campovettoriale delle velocità, e σ la tensione <strong>di</strong> Cauchy, impiegando la IIIaregola d’approssimazione del gra<strong>di</strong>ente (σ = 1), il secondo membro <strong>di</strong>quest’equazione può essere cosi <strong>di</strong>scretizzato:−≈−N∑J = 1( σI+ σJ) ⋅ ∇IWIJΔ VJ86
CAPITOLO 4 – METODI DI DISCRETIZZAZIONESapendo che la densità <strong>di</strong> massa si esprime come:ρI=mIΔ VISostituendo si ottiene l’espressione <strong>di</strong>scretizzata SPH dell’equazione delmoto:mIdvdtIN= − ∑J = 1ΔVIΔVJ( σ + σ ) ⋅ ∇ W (1 )IJIIJSe invece <strong>di</strong> usare la regola d’approssimazione del gra<strong>di</strong>ente IIIa,s’impiega la IIIb, per la quale σ = 2, <strong>di</strong>videndo per la densità <strong>di</strong> massa,l’equazione del moto può anche essere scritta come:=−Impiegando la IIIb riferita al campo vettoriale σ, il secondo membro <strong>di</strong>quest’equazione può essere approssimato come:−≈−N∑J = 1⎛⎜⎝σρI2I−σρJ2J⎞⎟⎠⋅ ∇IWIJmJMoltiplicando ambo i membri dell’equazione per la massa m i , osi ottienela seguente espressione dell’equazione del moto:mIdvdtI= − ∑⎛NIJmImJ⎜ −2 2⎟ ⋅ ∇J = 1IρJIWIJ⎝σρσ⎞⎠( 2 )Una terza espressione dell’equazione del moto, si può ottenereutilizzando la regola I d’approssimazione del gra<strong>di</strong>ente. Infatti, sapendo87
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEche il secondo membro dell’equazione (0), in virtù della regolad’approssimazione 4, si può scrivere come:−=− ( ∇⋅ < σ > − < σ >< ∇ W > )Essendo la funzione Kernel limitata, per quanto già <strong>di</strong>mostrato, ilsecondo termine al secondo membro della precedente equazione, sarànullo.Di conseguenza:−=−∇⋅Il cui secondo membro può essere <strong>di</strong>scretizzato secondo la regola Id’approssimazione del gra<strong>di</strong>ente, valida per il campo vettoriale σ:−∇⋅≈N∑J = 1Δ VJ( σJ− σI)⋅ ∇IWIJSostituendo l’approssimazione, e ricordando l’espressione della densità<strong>di</strong> massa ρ, l’equazione del moto <strong>di</strong>venta:mIdvdtIN= − ∑J = 1ΔVIΔVJ( σ − σ ) ⋅ ∇ W ( 3 )JIIIJIn queste tre <strong>di</strong>verse espressioni dell’equazione del moto, il primomembro, che è chiaramente sempre lo stesso, fisicamente esprime lavariazione nel tempo della quantità <strong>di</strong> moto. Infatti, la quantità <strong>di</strong> motodell’i-esima particella, è data dal prodotto della massa m I , che è costantee quin<strong>di</strong> in<strong>di</strong>pendente dal tempo, e della velocità v I , variabile in funzionedel tempo.88
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEEquazione dell’energia in SPHIl secondo membro dell’equazione dell’energia, utilizzando la secondaregola d’approssimazione <strong>di</strong> Monaghan, può essere riscritto come:111− < σ : ∇v>≈ − < σ : ( ρ∇v)>≈ −22ρρ< ρ< σ > : < ρ∇v>>Questo termine, può essere ulteriormente <strong>di</strong>scretizzato, impiegando la IIregola d’approssimazione del gra<strong>di</strong>ente per il campo vettoriale σ,l’equazione dell’energia può quin<strong>di</strong> essere espressa come:dEdtIN⎛ σ ⎞I= ⎜⎟ : ∑ m⎝ ρI ⎠ J = 1v⊗ ∇W2 J IJ I IJ(1)Le equazioni <strong>di</strong>scretizzate con il metodo SPH, non sempre preservano lecaratteristiche fisiche del corrispondente sistema continuo, comel’energia e la quantità <strong>di</strong> moto. Questo problema incide notevolmentesulla precisione e la qualità delle soluzioni numeriche.Dal punto <strong>di</strong> vista computazionale, un buono schema d’interpolazione,dovrebbe essere almeno capace <strong>di</strong> rappresentare correttamente il moto <strong>di</strong>un corpo rigido. Purtroppo, il metodo d’interpolazione SPH non è ingrado <strong>di</strong> rappresentare propriamente il moto <strong>di</strong> un corpo rigido. Ciòinduce ad una serie d’ostacoli nella computazione numerica. Sebbene, uncampo d’interpolazione non riesca a rappresentare il movimentocompleto del corpo rigido, essendo questo composto <strong>di</strong> una traslazione euna rotazione rigida, la sola traslazione può essere preservata in unacomputazione <strong>di</strong>screta.E’ possibile <strong>di</strong>mostrare che le equazioni <strong>di</strong> continuità e dell’energia,prima approssimate con il metodo SPH, sono degli invarianti Galileiani.89
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEInfatti, se si scrivono le equazioni <strong>di</strong> continuità e dell’energia rispetto adun sistema <strong>di</strong> riferimento cartesiano assoluto, le stesse equazionipermangono inalterate in un sistema <strong>di</strong> riferimento cartesiano in motorelativo rispetto a quello assoluto.La posizione e la velocità della generica particella, in cui si è<strong>di</strong>scretizzato il continuo, rispetto al riferimento relativo, possono esserecosì espresse:x'=x + atv'= v + aDove x’ e v’, sono rispettivamente la posizione e la velocità dellaparticella rispetto al sistema <strong>di</strong> riferimento relativo, mentre x e v sonodefinite rispetto a quello assoluto, a e t sono invece l’accelerazione el’istante <strong>di</strong> tempo.Ovviamente, la velocità si ottiene in funzione della posizione <strong>di</strong>videndoquesta ultima per il tempo.L’equazione <strong>di</strong> continuità e dell’energia in SPH, scritte nel nuovoriferimento <strong>di</strong>ventano quin<strong>di</strong>:d ρIdtmNj= ρI ∑j = 1 ρj' '( v − v ) ⋅ ∇IWIJIJdEdtIσNI=2 ∑ρ J = 1ImJ' '( v −VJ) ⋅ ∇IWIJIDato che, la <strong>di</strong>fferenza tra le velocità in seguito al cambio <strong>di</strong> riferimentoresta in ogni modo invariato:( v' − v' ) = ( v −v)IJIJle equazioni stesse saranno invarianti rispetto al riferimento cartesiano.90
CAPITOLO 4 – METODI DI DISCRETIZZAZIONE4.4.4 – I limiti del Metodo SPHI meto<strong>di</strong> SPH presentano notevoli vantaggi nelle computazioninumeriche, tra cui la facilità <strong>di</strong> trattare gran<strong>di</strong> deformazioni della Mesh, ola semplicità d’implementazione al calcolatore.Ciononostante, lo stesso metodo presenta una serie <strong>di</strong> limiti e<strong>di</strong>nconvenienti <strong>di</strong> seguito elencati [8].• Instabilità <strong>di</strong> tensione;• Insufficienza <strong>di</strong> consistenza d’interpolazione;• Difficoltà nel far rispettare le con<strong>di</strong>zioni <strong>di</strong> vincolo.Attraverso gli anni, sono state sviluppate varie tecniche per ilmiglioramento del metodo, e l’eliminazione delle varie patologie che simanifestano nelle computazioni numeriche, <strong>di</strong> seguito definite.Instabilità <strong>di</strong> tensioneSi definisce in questo modo la situazione in cui, in una regione deldominio dove sussiste uno stato tensionale, il moto delle particelle<strong>di</strong>venta instabile. Ciò significa che, una piccola perturbazione dellaposizione delle particelle, può causare un esponenziale aumento dellavelocità delle stesse, che può indurle ad un moto oscillatorio.Diversi autori hanno condotto stu<strong>di</strong> con il fine <strong>di</strong> in<strong>di</strong>viduare le cause <strong>di</strong>questo fenomeno, e in seguito per porvi rime<strong>di</strong>o.Per quanto attiene alle origini <strong>di</strong> tale fenomeno si fa riferimento airisultati conseguiti dagli stu<strong>di</strong> condotti da Sweegle [8].91
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEIpotizzando che le masse delle particelle a<strong>di</strong>acenti siano le stesse, e chesia sod<strong>di</strong>sfatta la con<strong>di</strong>zione secondo la quale:dWdxIII=0i criteri <strong>di</strong> stabilità <strong>di</strong> Sweegle vengono <strong>di</strong> seguito elaborati.Considerando una <strong>di</strong>stribuzione <strong>di</strong> particelle in cui la <strong>di</strong>stanza tra dueparticelle successive è pari alla Smoothing Lenght h, assumendo l’originedel sistema <strong>di</strong> riferimento cartesiano coincidente con la genericaparticella X I , e facendo riferimento ad un semplice casomono<strong>di</strong>mensionale, la particella I+1 è posizionata alla <strong>di</strong>stanza X I + h,mentre, il punto x in cui la derivata della funzione Kernel W’(x) siannulla, sarà compreso tra la particella X I e I+1, come <strong>di</strong> seguitomostrato.Trazioneσstabile instabileh-W'XI XI+1XW'instabilestabileCompressioneFigura 4. 1 – Instabilità d trazione delle particelle.92
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEAssumendo per convenzione che la tensione negativa sarà <strong>di</strong>compressione, e quella positiva <strong>di</strong> trazione, sarà possibile <strong>di</strong>stinguere nelpiano x-σ le seguenti situazioni [8].Trazione (σ>0)• Nel tratto in cui la derivata della Funzione Kernel -W ’ (x) ècrescente [-W ’ (x)>0], all’aumentare della variabile in<strong>di</strong>pendente xle particelle si allontanano, e la tensione <strong>di</strong> trazione σ allo stessotempo aumenta. Viceversa, al <strong>di</strong>minuire della variabile x leparticelle si avvicinano, e la tensione σ si riduce. Il sistema inquesto caso si definisce stabile.• Nel tratto in cui la derivata della Funzione Kernel -W ’ (x) èdecrescente [-W ’ (x)
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEx le particelle si allontanano, e la tensione <strong>di</strong> compressione σ allostesso tempo aumenta. Viceversa, al <strong>di</strong>minuire della variabile x leparticelle si avvicinano, e la tensione σ si riduce. Il sistema inquesto caso si definisce stabile.Tra le possibili soluzioni a questo problema Morris propose <strong>di</strong> introdurreuna speciale Kernel Function, ma tale soluzione produce risultatisod<strong>di</strong>sfacenti soltanto in alcuni casi particolari [8].Dyka propose il cosiddetto Stress Point Method, l’idea principale su cuisi fonda, risiede nell’introdurre dei punti ad<strong>di</strong>zionali, oltre a quelliintrodotti per la rappresentazione delle singole particelle, nel momento incui si vuole valutare lo stato tensionale o altri stati variabili. Mentre levariabili cinematiche, quali lo spostamento, la velocità, e l’accelerazionesono ancora riferite alle particelle SPH, a questi punti ad<strong>di</strong>zionali sonoinvece associati gli stati tensionali, o altri stati variabili nel tempo.Tali punti sono definiti Stress Point, e non sono niente altro che delleparticelle fittizie. Di seguito si riporta una rappresentazione grafica:Figura 4. 2 - Stress Point Method in uno spazio bi-<strong>di</strong>mensionale.94
CAPITOLO 4 – METODI DI DISCRETIZZAZIONECon<strong>di</strong>zioni <strong>di</strong> vincoloI meto<strong>di</strong> particellari in generale hanno delle <strong>di</strong>fficoltà nel rafforzare lecon<strong>di</strong>zioni <strong>di</strong> vincolo essenziali. Per l’SPH, sono stati sviluppati deimeto<strong>di</strong> correttivi per risolvere questa patologia. Notevolmente impiegatonelle computazioni pratiche, è il così detto “Ghost Particle”, propostoda Randles e Libersky [8]. In virtù <strong>di</strong> questo metodo, si supponga che l’iesimaparticella i sia vincolata, mentre le altre particelle all’interno dellostesso dominio N(i), possano essere sud<strong>di</strong>vise in tre sottoinsiemi:• I(i): punti interni al dominio, a<strong>di</strong>acenti la particella i;• B(i): punti <strong>di</strong> confine, a<strong>di</strong>acenti la particella i;• G(i): punti esterni al dominio, a<strong>di</strong>acenti la particella i.L’insieme N(i), può quin<strong>di</strong> essere espresso come l’unione dei tresottoinsiemi descritti:N( i)= I()i ∪Bi() ∪G() iDove G(i) sono appunto le particelle fantasma introdotte (GhostParticle) [8].In quest’approccio, si può ricavare l’equazione <strong>di</strong> vincolo per ungenerico campo scalare f i , infatti, assumendo:ffjjΔV==jffibc= ΔVi∀j∈ B(i)∀j∈ G(i)95
CAPITOLO 4 – METODI DI DISCRETIZZAZIONEla formula <strong>di</strong> correzione per il generico campo scalare f, è definita comesegue:fi=fbc+∑ ( fj− fbc)j∈I ( i )⎛⎜1 −⎝∑j∈B ( i )ΔVWΔVWjijj⎞⎟⎠ijDove:• f bc è il prescritto valore per x = x i ;• ΔVj è il volume elementare della j-esima particella;• W ij è la funzione Kernel.Il principale vantaggio nell’utilizzare questa formula correttiva, risiedenel fatto che questa <strong>di</strong>pende esclusivamente dalle particelle interne, enon da quelle esterne (Ghost Particle).96
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970Capitolo 5Modellazione Numerica con LS-Dyna Version 970.Modellare numericamente una prova sperimentale significa riprodurre,grazie all’ausilio <strong>di</strong> un co<strong>di</strong>ce <strong>di</strong> calcolo, lo stesso elemento oggetto dellasperimentazione. Le evidenze sperimentali serviranno per poterverificare l’atten<strong>di</strong>bilità del modello creato al calcolatore, oppure irisultati dei test potranno essere impiegati per calibrare il modello stesso.Tutto ciò è finalizzato alla costruzione <strong>di</strong> un modello che consente <strong>di</strong>eseguire sperimentazioni numeriche, senza ricorrere necessariamente alleprove sperimentali da realizzare in laboratorio, con i costi e leproblematiche che esse comportano.In<strong>di</strong>viduate quali sono le principali finalità della modellazione numerica,bisogna poi in seguito scegliere tra i co<strong>di</strong>ci <strong>di</strong> calcolo strutturali a<strong>di</strong>sposizione, quello da impiegare per la simulazione stessa.Ai fini della modellazione, si è scelto <strong>di</strong> impiegare il programma adelementi finiti d’uso generale LS-Dyna Version 970 [11], che consentela simulazione <strong>di</strong> problemi complessi, ed è largamente accettato, comesoftware d’analisi, per le più avanzate applicazioni dell'ingegneria.5.1 - Software LS-Dyna Version 970LS-Dyna è un programma <strong>di</strong> calcolo ad elementi finiti, che permette <strong>di</strong>analizzare dei comportamenti fisici altamente non lineari con dei meto<strong>di</strong>numerici detti espliciti o impliciti. Frequenti applicazioni si hanno nelcaso <strong>di</strong> fenomeni in cui gran<strong>di</strong> deformazioni avvengono in un breveintervallo <strong>di</strong> tempo, come ad esempio in un Crash test, o inun’esplosione.97
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970LS-Dyna conta numerosi utilizzatori nell’industria automobilistica,aeronautica, aerospaziale e nella formatura <strong>di</strong> metalli. Il calcoloaccoppiato fluido-struttura permette <strong>di</strong> simulare l’interazione tra unastruttura e un fluido come nell’aquaplanning o nella caduta <strong>di</strong> unrecipiente contenente un fluido.Le origini del LS-Dyna risalgono alla metà degli anni settanta, quando fusviluppata la sua prima versione, nota come DYNA3D, per opera delLawrence Livermore National Laboratory.Il DYNA3D nasce come software d’analisi, sulla base della teoria deglielementi finiti, per la risoluzione <strong>di</strong> problemi strutturali e <strong>di</strong> meccanicadel continuo. Grazie alla sua rapi<strong>di</strong>tà nell’integrazione delle equazionidel moto, è specialmente impiegato per la risoluzione <strong>di</strong> problemi<strong>di</strong>namici.Figura 5. 1 - Modellazione <strong>di</strong> una Turbina con LS-Dyna.Essa possiede una libreria <strong>di</strong> materiali (Material Model), da poterimpiegare nelle modellazioni, tra i quali sono inclusi materiali isotropicielastici,ortotropici-elastici ed elasto-plastici. Consente la simulazioned’elementi soli<strong>di</strong>, shell, beam, spring, e damper. Inoltre si possono98
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970generare contatti tra superfici, in modo tale da considerare le interazionitra corpi <strong>di</strong>versi. Col passare degli anni dal 1976 fino al 1988, ilDYNA3D è stato <strong>di</strong> volta in volta arricchito con nuove caratteristiche epossibilità, riguardanti materiali ed elementi da modellare. Nelle versioniche si sono succedute sono stati apportati miglioramenti ai tempid’integrazione, per la risoluzione delle equazioni del moto, riducendonotevolmente i tempi d’analisi, e consentendo <strong>di</strong>scretizzazione semprepiù fitte degli elementi.Verso la fine del 1988, dal DYNA3D nasce il più recente co<strong>di</strong>ce <strong>di</strong>calcolo LS-Dyna. Questa evoluzione del DYNA3D è dettata dallacrescente richiesta d’applicazioni automobilistiche. Gli sforzi per losviluppo del co<strong>di</strong>ce <strong>di</strong> calcolo furono intensificati, proprio per far frontealla maggiore richiesta <strong>di</strong> risoluzione <strong>di</strong> problemi automobilistici. Agliinizi del 1989 la scrittura del co<strong>di</strong>ce passò dalla Lawrence LivermoreNational Laboratory (LLNL), alla Livermore Software TechnologyCorporation, California. Per opera della LSTC sono state migliorate<strong>di</strong>verse capacità del software. Da questo momento, per i successivi 18anni, passando attraverso le <strong>di</strong>verse versioni del programma, dallaVersion 940 fino alla recentissima Version 971, innumerevoli sono statele migliorie adottate. Tra queste si riportano <strong>di</strong> seguito solo alcune dellepiù innovative ed interessanti, che caratterizzano la versione più recente,impiegata per la modellazione numerica. Le sue capacità attualiconsentono la soluzione <strong>di</strong> Nonlinear dynamics, Rigid body dynamics,Quasi-static simulations, Normal modes, Linear static, Thermal analysis,Fluid analysis, Eulerian capabilities, ALE (Arbitrary Lagrangian-Eulerian), Fluid-structure interactions, FEM-rigid multi-body dynamicscoupling (MADYMO, CAL3D), Underwater shock, Failure analysis,Crack propagation, Real-time acoustics, Design optimization, Implicit99
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970springback, Multi-physics coupling, Structural-thermal coupling,Adaptive Remeshing, Smooth particle hydrodynamics, Element-freemeshless method [11].LS-Dyna utilizza per la soluzione delle equazioni del moto sia il metodoesplicito sia quello implicito. La <strong>di</strong>sponibilità in un unico prodottosoftware <strong>di</strong> meto<strong>di</strong> sia espliciti sia impliciti è importante, perchè unsingolo metodo <strong>di</strong> soluzione non è convenientemente applicabile inqualsiasi situazione. Con un solo prodotto, LS-Dyna, si è in grado <strong>di</strong>portare a soluzione le problematiche più <strong>di</strong>verse, tra cui:• Solid Mechanics.• Nonlinear elements for large deformations, Reduced and fullyintegrated, linear elements for eigenvalues, superelements, andlinear structural analyses.• Dynamics: Explicit methods for short duration transient problems,implicit methods for static and long duration problems,instantaneously switch between methods, Fluid Mechanic.• Flow regim: Incompressible flow, Compressible flow, Acoustics.Il metodo esplicito è in pratica l'unico applicabile in <strong>di</strong>versi casi, comead esempio le simulazioni d’impatto (crash e drop test), il metal forming(stampaggi a caldo e a freddo, laminazioni, imbottiture), le simulazionid’eventi prodotti da esplosioni, sia in aria sia in acqua, oppure gli effettiprodotti dai terremoti sulle strutture. Può essere impiegato per lesimulazioni su materiali non metallici quali compositi o schiumepolimeriche. Le schiume sono i principali componenti, ad esempio, deise<strong>di</strong>li d’auto e pertanto costituiscono un elemento <strong>di</strong> primaria importanza100
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970per la sicurezza degli occupanti. In ultimo, ma non meno importante, conil metodo esplicito si è in grado <strong>di</strong> simulare tutte le fasi d’esercizio <strong>di</strong> unairbag, dall'esplosione della carica, al <strong>di</strong>spiegamento durante ilgonfiaggio, all'impatto del corpo umano sul cuscino gonfiato, allosgonfiaggio controllato.Tra le potenzialità del software in precedenza elencate, quelle chemaggiormente ci hanno indotto a sceglierlo per la simulazione numerica,sono senza dubbio la possibilità <strong>di</strong> implementare due meto<strong>di</strong> <strong>di</strong><strong>di</strong>scretizzazione, dettagliatamente descritti nel capitolo precedente, ilFinite Element Method (FEM), e lo Smoothed Particle Hydrodynamics(SPH), e in secondo luogo la capacità del co<strong>di</strong>ce <strong>di</strong> calcolo <strong>di</strong>considerare gran<strong>di</strong> deformazioni che si verificano in un intervallo <strong>di</strong>tempo <strong>di</strong> pochi millisecon<strong>di</strong>, così come accade nella simulazione <strong>di</strong>un’esplosione.5.2 – Modellazione della Prova SperimentaleCon l’ausilio del co<strong>di</strong>ce <strong>di</strong> calcolo LS-Dyna Version 970, si sonomodellate le quattro prove sperimentali in precedenza descritte.Si è scelto <strong>di</strong> impiegare le seguenti unità <strong>di</strong> misura [12].Lunghezze Tempo Pressione Massa Temperatura Densità[m] [s] [Pa] [Kg] [K] Kg/m 3 ]Tabella 5. 1 – Unità <strong>di</strong> Misure adottate dal LS-Dyna Version 970.Tale modellazione è stata condotta utilizzando due meto<strong>di</strong> <strong>di</strong><strong>di</strong>scretizzazione <strong>di</strong>fferenti, il FEM e l’SPH. Si descrivono in seguitoquali sono le caratteristiche dello stesso modello realizzato con i duemeto<strong>di</strong> <strong>di</strong>fferenti.101
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 9705.2.1 – Modello FEML’elemento strutturale piastra viene in questo caso realizzato me<strong>di</strong>anteun Box_Solid [12]. Ovviamente la scelta del numero d’elementi checostituiscono il Box, e quin<strong>di</strong> la piastra, è effettuata in funzione del gradod’accuratezza che si vuole conseguire nel calcolo, associato al numerod’informazioni che da lui si vogliono ottenere, e tenendo presente che unnumero eccessivo d’elementi soli<strong>di</strong> e <strong>di</strong> no<strong>di</strong> che costituiscono la Mesh,incrementano i tempi d’analisi del processore. Questo perchè il numerod’equazioni che il processore dovrà risolvere aumenta all’aumentare delnumero <strong>di</strong> no<strong>di</strong>. La piastra è quin<strong>di</strong> sud<strong>di</strong>visa in 11520 elementi soli<strong>di</strong>(Solid Element) [12]. Ovviamente, trattandosi <strong>di</strong> una <strong>di</strong>scretizzazione inelementi finiti, ad ognuno <strong>di</strong> questi saranno associate le stesse<strong>di</strong>mensioni geometriche e caratteristiche dei materiali. Le <strong>di</strong>mensioni delsingolo elemento sono (2,5x2,5x1,8)cm 3 , in questo modo si avrà unamaglia <strong>di</strong> 48x48 elementi <strong>di</strong>stribuiti su 5 strati sovrapposti. Ognielemento è contrad<strong>di</strong>stinto da 8 no<strong>di</strong>, ognuno dei quali a sua voltain<strong>di</strong>viduato, rispetto all’origine degli assi del sistema <strong>di</strong> riferimentocoincidente con il baricentro geometrico della piastra, dalle suecoor<strong>di</strong>nate cartesiane (x, y, z).Ad esempio per l’elemento in<strong>di</strong>viduato dal numero identificativo eid(element identification) = 1 si avrà:*ELEMENT_SOLID$# eid pid n1 n2 n3 n4 n5 n6 n7 n81 1 1 2 51 50 2402 2403 2452 2451Tabella 5. 2 – Element Solid.Dove con n i s’in<strong>di</strong>ca il numero identificativo del nodo che appartieneall’elemento, coincidente con uno dei suoi vertici, mentre pid è ilnumero identificativo della Part associata all’elemento.102
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970La Part è un comando del co<strong>di</strong>ce <strong>di</strong> calcolo che consente <strong>di</strong> assegnare apiù elementi le stesse proprietà, quali ad esempio lo stesso Material, lastessa Equation of State (EOS) e la stessa Section, richiamandosemplicemente i rispettivi numeri identificativi (mid, eosid, secid) [12].*PART$# titlePart$# pid secid mid eosid hgid grav adpopt tmid1 1 1 1Tabella 5. 3 – Part.Nella Section sono definite alcune proprietà, quali la formulazionedell’elemento, le regole d’integrazione o gli spessori nodali, secondo latipologia d’Element a cui la Section è associata. Nel caso dellaSection_Solid si attribuisce all’elemento l’Element Formulation Optinon(elform) [12], in questo caso specifico si sceglie <strong>di</strong> considerare costantela tensione nel singolo elemento.*SECTION_SOLID_TITLESection_Solid$# secid elform aet1 1Tabella 5. 4 – Section Solid.Costruito il modello geometrico della piastra, e la mappa topologicadegli elementi finiti in cui questa è stata <strong>di</strong>scretizzata, in seguito sidefiniscono le con<strong>di</strong>zioni <strong>di</strong> vincolo e <strong>di</strong> carico.Per quanto riguarda le con<strong>di</strong>zioni <strong>di</strong> vincolo, si crea un Set <strong>di</strong> No<strong>di</strong> [12],in altre parole un insieme <strong>di</strong> No<strong>di</strong>, a cui andrà poi in seguito associato lacon<strong>di</strong>zione <strong>di</strong> vincolo. In questo caso si è scelto <strong>di</strong> vincolare lungo l’assey del sistema <strong>di</strong> riferimento cartesiano, i due bor<strong>di</strong> esterni della piastra. IlSet <strong>di</strong> no<strong>di</strong> a loro corrispondente è il seguente:103
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970*SET_NODE_LIST_TITLEVincoli$# sid da1 da2 da3 da437$# nid1 nid2 nid3 nid4 nid5 nid6 nid7 nid81 50 99 148 197 246 295 344393 442 491 540 589 638 687 736785 834 883 932 981 1030 1079 11281177 1226 1275 1324 1373 1422 1471 15201569 1618 1667 1716 1765 1814 1863 19121961 2010 2059 2108 2157 2206 2255 23042353 2402 2451 2500 2549 2598 2647 26962745 2794 2843 2892 2941 2990 3039 30883137 3186 3235 3284 3333 3382 3431 34803529 3578 3627 3676 3725 3774 3823 38723921 3970 4019 4068 4117 4166 4215 42644313 4362 4411 4460 4509 4558 4607 46564705 4754 4803 4852 4901 4950 4999 50485097 5146 5195 5244 5293 5342 5391 54405489 5538 5587 5636 5685 5734 5783 58325881 5930 5979 6028 6077 6126 6175 62246273 6322 6371 6420 6469 6518 6567 66166665 6714 6763 6812 6861 6910 6959 70087057 7106 7155 7204 7253 7302 7351 74007449 7498 7547 7596 7645 7694 7743 77927841 7890 7939 7988 8037 8086 8135 81848233 8282 8331 8380 8429 8478 8527 85768625 8674 8723 8772 8821 8870 8919 89689017 9066 9115 9164 9213 9262 9311 93609409 9458 9507 9556 9605 9654 9703 97529801 9850 9899 9948 9997 10046 10095 1014410193 10242 10291 10340 10389 10438 10487 1053610585 10634 10683 10732 10781 10830 10879 1092810977 11026 11075 11124 11173 11222 11271 1132011369 11418 11467 11516 11565 11614 11663 1171211761 11810 11859 11908 11957 12006 12055 1210412153 12202 12251 12300 12349 12398 12447 1249612545 12594 12643 12692 12741 12790 12839 1288812937 12986 13035 13084 13133 13182 13231 1328013329 13378 13427 13476 13525 13574 13623 1367213721 13770 13819 13868 13917 13966 14015 1406414113 14162 14211 14260 14309 14358 49 98147 196 245 294 343 392 441 490539 588 637 686 735 784 833 882931 980 1029 1078 1127 1176 1225 12741323 1372 1421 1470 1519 1568 1617 16661715 1764 1813 1862 1911 1960 2009 20582107 2156 2205 2254 2303 2352 2401 24502499 2548 2597 2646 2695 2744 2793 28422891 2940 2989 3038 3087 3136 3185 32343283 3332 3381 3430 3479 3528 3577 36263675 3724 3773 3822 3871 3920 3969 40184067 4116 4165 4214 4263 4312 4361 44104459 4508 4557 4606 4655 4704 4753 48024851 4900 4949 4998 5047 5096 5145 51945243 5292 5341 5390 5439 5488 5537 55865635 5684 5733 5782 5831 5880 5929 59786027 6076 6125 6174 6223 6272 6321 63706419 6468 6517 6566 6615 6664 6713 67626811 6860 6909 6958 7007 7056 7105 71547203 7252 7301 7350 7399 7448 7497 75467595 7644 7693 7742 7791 7840 7889 79387987 8036 8085 8134 8183 8232 8281 83308379 8428 8477 8526 8575 8624 8673 87228771 8820 8869 8918 8967 9016 9065 91149163 9212 9261 9310 9359 9408 9457 95069555 9604 9653 9702 9751 9800 9849 98989947 9996 10045 10094 10143 10192 10241 1029010339 10388 10437 10486 10535 10584 10633 10682104
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 97010731 10780 10829 10878 10927 10976 11025 1107411123 11172 11221 11270 11319 11368 11417 1146611515 11564 11613 11662 11711 11760 11809 1185811907 11956 12005 12054 12103 12152 12201 1225012299 12348 12397 12446 12495 12544 12593 1264212691 12740 12789 12838 12887 12936 12985 1303413083 13132 13181 13230 13279 13328 13377 1342613475 13524 13573 13622 13671 13720 13769 1381813867 13916 13965 14014 14063 14112 14161 1421014259 14308 14357 14406Tabella 5. 5 – Set_Node_List Vincoli.Al Set <strong>di</strong> no<strong>di</strong> così definito sono poi associate le con<strong>di</strong>zioni <strong>di</strong> vincolo,bloccando gli spostamenti <strong>di</strong> tali no<strong>di</strong> nelle <strong>di</strong>rezioni x y e z, realizzandocosì un vincolo <strong>di</strong> tipo incastro.*BOUNDARY_SPC_SET_ID$# cid hea<strong>di</strong>ng1Incasro$# nsid cid dofx dofy dofz dofrx dofry dofrz37 0 1 1 1Tabella 5. 6 – Boundary Con<strong>di</strong>ction.Come si può notare, nella Card che definisce le con<strong>di</strong>zioni <strong>di</strong> vincolo(Boundary Con<strong>di</strong>ction) [12] una volta richiamato il nsid (Node SetIdentification), corrispondente al Set <strong>di</strong> no<strong>di</strong> creato in precedenza, sidefiniscono quali sono gli spostamenti e gli assi lungo i quali avvengono,oppure le rotazioni e gli assi rispetto ai quali si realizzano, che devonoessere impe<strong>di</strong>ti.Una volta calcolate le curve <strong>di</strong> pressione che agiscono all’estradossodella piastra, così come descritto al Capitolo 3, queste dovranno esseredefinite nel modello e in seguito assegnate agli elementi soli<strong>di</strong>.Per definire una qualsivoglia curva, che in<strong>di</strong>chi l’andamento dellapressione in funzione del tempo, o che sia in ogni modo l’andamento <strong>di</strong>una variabile <strong>di</strong>pendente in funzione <strong>di</strong> un'altra in<strong>di</strong>pendente (ese.Temperatura e Tempo), si utilizza il comando Define_Curve[12].Questo comando consente <strong>di</strong> assegnare in maniera tabulata, nel piano (x,105
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970y), i valori da associare alle due variabili, in<strong>di</strong>pendente lungo l’asse delleascisse e <strong>di</strong>pendente lungo l’asse delle or<strong>di</strong>nate. Inoltre, si possono anchedefinire dei fattori <strong>di</strong> scala e d’Offset sia per i valori lungo l’asse delleascisse (sfa, offa), che per quelli definiti lungo l’asse delle or<strong>di</strong>nate (sfo,offo). Ad ogni curva si associa un nome (Title), e un numeroidentificativo lcid (Load Curve Identification) [12].A titolo d’esempio si riporta una delle 36 curve <strong>di</strong> carico, definite permodellare l’effetto prodotto sulla superficie della piastra, investitadall’onda d’urto prodotta dall’esplosione:*DEFINE_CURVE_TITLEA-1$# lcid sidr sfa sfo offa offo dattyp1 0 1.000000 1.000000$# a1 o10.000 1.6806463e+0054.9999999e-005 1.4723016e+0059.9999997e-005 1.2860335e+0051.5000001e-004 1.1196810e+0051.9999999e-004 97128.4375002.5000001e-004 83906.7656253.0000001e-004 72142.1640633.4999999e-004 61688.8828133.9999999e-004 52414.9492194.4999999e-004 44200.9375005.0000002e-004 36938.7890635.5000000e-004 30530.8046886.0000003e-004 24888.6582036.5000000e-004 19932.5566416.9999998e-004 15590.4423837.5000001e-004 11797.2744147.9999998e-004 8494.37890638.5000001e-004 5628.85498058.9999998e-004 3153.03002939.5000002e-004 1023.97601320.00100000 -796.945007320.00105000 -2344.48193360.00110000 -3649.86499020.00115000 -4741.14306640.00120000 -5643.48486330.00125000 -6379.45898440.00130000 -6969.28076170.00135000 -7431.04687500.00140000 -7780.93310550.00145000 -8033.38818360.00150000 -8201.30371090.00160000 -8328.19824220.00170000 -8239.07128910.00180000 -7994.91113280.00190000 -7643.41308590.00205000 -6993.43408200.00220000 -6273.64990230.00235000 -5543.26904300.00250000 -4839.44921880.00265000 -4184.00195310.00280000 -3588.2438965106
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 9700.00300000 -2893.49707030.00320000 -2310.45703130.00340000 -1829.96398930.00360000 -1439.52099610.00380000 -1125.79895020.004000000.00420000Tabella 5. 7 – Curva <strong>di</strong> Pressione Tabulata.Grafico 5. 1 – Andamento della Curva <strong>di</strong> Pressione, calcolata per l’area <strong>di</strong> caricoA-1 e relativa alla prima prova modellata.Lo stesso proce<strong>di</strong>mento è ripetuto per le 36 <strong>di</strong>verse curve <strong>di</strong> pressionecalcolate in precedenza, e per le quattro <strong>di</strong>verse con<strong>di</strong>zioni <strong>di</strong> caricorealizzate nelle altrettante prove sperimentali eseguite.Definite le curve <strong>di</strong> carico, bisognerà poi in seguito assegnare questecon<strong>di</strong>zioni <strong>di</strong> carico agli elementi che costituiscono la piastra stessa.Per i modelli realizzati in FEM, si è scelto <strong>di</strong> applicare il carico inmaniera <strong>di</strong>stribuita. In questo caso sono stati definiti dei Set_Segment[12], vale a <strong>di</strong>re delle aree <strong>di</strong> carico, coincidenti con le stesse cheabbiamo in precedenza definito per il calcolo delle curve <strong>di</strong> pressioniderivanti dall’esplosione. Per definire un Segment è sufficientein<strong>di</strong>viduare 4 no<strong>di</strong> che lo delimitano, il singolo Segment sarà quin<strong>di</strong> una107
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970semplice area quadrata. Ogni Set_Segment sarà invece costituito da 4Segment <strong>di</strong>versi, tra loro simmetrici rispetto al centro della piastra. Siricorda, infatti, che la con<strong>di</strong>zione <strong>di</strong> carico a cui la piastra è sottoposta èperfettamente simmetrica rispetto al centro della stessa, essendo la caricaesplosiva posizionata ad una certa <strong>di</strong>stanza dal suo centro. In definitivaavremo 36 Set_Segment, per un totale <strong>di</strong> 144 Segment [12].*SET_SEGMENT_TITLEA-1$# sid da1 da2 da3 da41$# n1 n2 n3 n4 a1 a2 a3 a414382 14186 14190 1438612030 12034 12230 1222614382 14378 14182 1418612030 12226 12222 12026Tabella 5. 8 - Set_Segment.Ad ogni Set_Segment è poi associata la corrispondente curva <strong>di</strong>pressione, sapendo che questa si ripete identicamente per i 4 Segment alei appartenenti.A tale fine si utilizza il comando Load Set_Segment [12], che consente <strong>di</strong>associare ad ogni ssid (Set_Segment Identification) la corrispondentelcid (Load Curve Identification), moltiplicata per un fattore <strong>di</strong> scala sf, ilquale si assume unitario. Questo comando ci consente <strong>di</strong> applicare unapressione <strong>di</strong>stribuita su un’area quadrilatera definita da 4 no<strong>di</strong>.*LOAD_SEGMENT_SET$# ssid lcid sf at1 1 1.0000002 2 1.0000003 3 1.0000004 4 1.0000005 5 1.0000006 6 1.0000007 7 1.0000008 8 1.0000009 9 1.00000010 10 1.00000011 11 1.00000012 12 1.00000013 13 1.000000108
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 97014 14 1.00000015 15 1.00000016 16 1.00000017 17 1.00000018 18 1.00000019 19 1.00000020 20 1.00000021 21 1.00000022 22 1.00000023 23 1.00000024 24 1.00000025 25 1.00000026 26 1.00000027 27 1.00000028 28 1.00000029 29 1.00000030 30 1.00000031 31 1.00000032 32 1.00000033 33 1.00000034 34 1.00000035 35 1.00000036 36 1.000000Tabella 5. 9 – Load Set_Segment.Figura 5. 2 - Sezione della Piastra sottoposta a Carico <strong>di</strong>stribuito.Per realizzare un modello quanto più atten<strong>di</strong>bile è possibile, sarànecessario attribuire a singoli elementi anche il proprio peso. Per farequesto è necessario creare una Set_Part_List, in altre parole una lista <strong>di</strong>Part alle quali associare un unico carico, il peso proprio. Si associaquin<strong>di</strong> alla Set_Part_List l’unica Part <strong>di</strong> cui <strong>di</strong>sponiamo [12].109
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970*SET_PART_LIST_TITLEpart list solid$# sid da1 da2 da3 da41$# pid1 pid2 pid3 pid4 pid5 pid6 pid7 pid81Tabella 5. 10 – Set_Part_List.Si definisce quin<strong>di</strong> un ulteriore curva, in questo caso semplicementecostate, essendo la forza peso sempre la stessa in<strong>di</strong>pendentemente daltempo, si definisce un Load_Body_Z [12], in cui si moltiplica la curva <strong>di</strong>carico in precedenza costruita per un fattore <strong>di</strong> scala sf, pari a 9,81 m/s 2 ,l’accelerazione <strong>di</strong> gravità, e si associa la nuova con<strong>di</strong>zione <strong>di</strong> caricoall’intera Part.*DEFINE_CURVE_TITLEPeso$# lcid sidr sfa sfo offa offo dattyp37 0 1.000000 1.000000$# a1 o10.000 1.000000000.00600000 1.00000000*LOAD_BODY_PARTS$# psid1*LOAD_BODY_Z$# lcid sf lciddr xc yc zc37 9.810000Tabella 5. 11 – Carico da Peso Proprio.Per completare il modello, non rimane altro che definire le caratteristichemeccaniche dei materiali, calcestruzzo e acciaio, utilizzati per lacostruzione della piastra. A tal scopo si rimanda al Capitolo 6, in cui sidescriveranno in maniera dettagliata i Material Model impiegati, il modoin cui si definisce l’Equation of State ad essi associati, ed infine le curve<strong>di</strong> Strain-Rate, che descrivono il miglioramento del comportamento deimateriali, per effetto dei carichi <strong>di</strong>namici a cui sono soggetti. Questeultime Card che definiscono il modello sono le stesse sia per il MetodoFEM sia per quello SPH.110
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970Completato il modello in FEM per la prima con<strong>di</strong>zione <strong>di</strong> carico, percostruire gli altri tre modelli rimanenti, sarà sufficiente copiare lo stessomodello mo<strong>di</strong>ficando le sole curve <strong>di</strong> pressione riguardanti le altre trecon<strong>di</strong>zioni <strong>di</strong> carico.5.2.2 – Modello SPHIn questo caso per creare l’elemento piastra, a <strong>di</strong>fferenza <strong>di</strong> quanto fattoper il modello FEM, non si costruisce una Mesh, bensì una mappatopologica <strong>di</strong> soli no<strong>di</strong>. In questo caso, infatti, la piastra non è sud<strong>di</strong>visain un numero <strong>di</strong>screto d’elementi finiti <strong>di</strong> forma prismatica, ma in unnumero <strong>di</strong>screto d’elementi nodali, definiti particelle. Ad ogni particellaè associata una massa ed una posizione nello spazio, in<strong>di</strong>viduata dalle trecoor<strong>di</strong>nate (x, y, z), sempre rispetto all’origine degli assi del riferimentocartesiano considerato dal programma. Ad ogni nodo della mappatopologica costruita in precedenza, si associa un elemento particellaredotato <strong>di</strong> massa. La piastra è stata <strong>di</strong>scretizzata in un numero totale <strong>di</strong>particelle pari a 11520. Essendo il numero <strong>di</strong> particelle coincidenti conquello degli Element Solid, in cui è stata <strong>di</strong>scretizzata la piastra con ilmetodo FEM, si potrà operare il confronto tra i due meto<strong>di</strong>. Questielementi particellari si <strong>di</strong>stribuiscono su cinque superfici sovrapposte,ognuna delle quali costituita da 48x48 elementi particellari. Nel piano (x,y) le particelle <strong>di</strong>stano tra loro 2,5 cm in entrambe le <strong>di</strong>rezioni, mentrelungo l’asse z i cinque strati sono posti ad una <strong>di</strong>stanza <strong>di</strong> 2,25 cm.La massa d’ogni singola particella è stata semplicemente calcolata<strong>di</strong>videndo il peso totale della piastra per il numero <strong>di</strong> particelle che lacostituiscono.111
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970P tot = γ s V tot = 2500 Kg/m 3 (0,09 x1,2 x1,2)m 3 = 324 Kg⇓M ele = P tot / Num ele = 324 Kg / 6912 = 0,046875 Kg*ELEMENT_SPH$# nid pid mass1 1 0.04687500Tabella 5. 12 – Element SPH.Ad ogni nid (Node Identification) è attribuita una particella <strong>di</strong> massa(mass) pari a 0,046875 Kg, ed una pid (Part Identification), a cuicompete la stessa definizione data per la modellazione in FEM [12].La <strong>di</strong>fferenza principale che sussiste tra la modellazione in FEM e quellain SPH, risiede nella definizione della Section da associare all’elementomodellato. Mentre per il metodo FEM si è attribuito all’elementomodellato una Section_Solid, in questo caso sarà ovviamente necessariodefinire una Section_SPH [12]. Questo comando consente <strong>di</strong> associarealcune proprietà alle singole particelle.*SECTION_SPH_TITLESPH_section$# secid cslh hmin hmax sphini death start1 1.200000 0.200000 2.000000 0.0001.0000E+20Tabella 5. 13 – Section SPH.Il parametro numerico <strong>di</strong> maggiore interesse che deve essere in questocaso definito, è la Smoothing Lenght (h), <strong>di</strong> cui già si è detto nel capitoloprecedente.Il processore LS-Dyna utilizza una Smoothing Lenght variabile durante iltempo d’analisi. Il Processore calcola un valore iniziale <strong>di</strong> SmoothingLenght (h 0 ), come la massima tra le minime <strong>di</strong>stanze tra ogni particella.112
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970Ad ogni particella è associato la propria Smoothing Lenght, che varia neltempo in accordo con la seguente equazione:ddt( h ( t )) = h ( t ) <strong>di</strong>v ( v)Dove h(t) è la Smoothing Lenght in funzione del tempo, mentre <strong>di</strong>v(v) èla <strong>di</strong>vergenza del flusso. La Smoothing Lenght aumenta, quando leparticelle si allontanano le une dalle altre e si riduce, quando aumenta ladensità delle particelle. Esso varia in modo tale da mantenere costante ilnumero <strong>di</strong> particelle tra loro vicine.La Smoothing Lenght varia tra un valore minimo e uno massimo:Hmin⋅ h0≤ h t )( ≤ H ⋅ hmax0Non è possibile associare un valore unitario né a quello massimo né aquello minimo, H min e H max , in quanto così facendo si definirebbe unaSmoothing Lenght costante al variare del tempo e dello spazio, ecoincidente con quella iniziale h 0 calcolata dal processore [11].Nella Card della Section_SPH, è necessario definire oltre al valoreminimo e massimo della Smoothing Lenght (h min , h max ), anche unacostante cslh, che moltiplica la Smoothing Lenght delle particelle. Talevalore deve essere compreso tra 1,05 e 1,3. Il valore <strong>di</strong> Default è uguale1,2 ed è ritenuto accettabile per <strong>di</strong>verse problematiche. Valori inferioriall’unità sono ritenuti inammissibili, mentre quelli maggiori <strong>di</strong> 1,3aumenterebbero i tempi <strong>di</strong> computazione del software.I parametri sphini, death e start, che definiscono la Card, in<strong>di</strong>viduanorispettivamente un valore iniziale della Smoothing Lenght, ed il tempod’arresto e d’inizio dell’approssimazione. Nel primo caso se si definisce113
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970un valore <strong>di</strong> sphini <strong>di</strong>verso dallo 0,0 si sovrascrive il valore iniziale h 0calcolato dal processore all’inizio del calcolo [11].Una successiva <strong>di</strong>fferenza rispetto al modello costruito in FEM, riguardala modalità d’applicazione dei carichi. Questi ultimi ovviamente nonvariano per le stesse prove che sono state modellate, al variare dei duemeto<strong>di</strong> impiegati FEM e SPH.In questo caso essendo la piastra <strong>di</strong>scretizzata in un numero finitod’elementi nodali (Element_SPH), è preferibile applicare il cariconodalmente. Si passa quin<strong>di</strong> da una con<strong>di</strong>zione <strong>di</strong> carico <strong>di</strong>stribuita aduna <strong>di</strong> carico concentrato. Ogni singolo elemento particellare checostituisce l’estradosso della piastra, sarà quin<strong>di</strong> soggetto ad una forzaconcentrata, d’intensità variabile da una particella all’altra, e <strong>di</strong>rettalungo l’asse z verso il basso.Per definire questa con<strong>di</strong>zione <strong>di</strong> carico è quin<strong>di</strong> necessario costruire deiSet <strong>di</strong> no<strong>di</strong>, allo stesso modo <strong>di</strong> quanto visto per la definizione dellecon<strong>di</strong>zioni <strong>di</strong> vincolo. Si definiranno quin<strong>di</strong> 36 Set_Node_List [12], adognuno dei quali apparteranno 64 no<strong>di</strong> <strong>di</strong>fferenti, riconducibili alle 4aeree <strong>di</strong> carico, simmetriche rispetto al centro della piastra, così comedescritte in precedenza.*SET_NODE_LIST_TITLEA-1$# sid da1 da2 da3 da41$# nid1 nid2 nid3 nid4 nid5 nid6 nid7 nid86885 6886 6887 6888 6837 6838 6839 68404773 4774 4775 4776 4725 4726 4727 47284681 4682 4683 4684 4633 4634 4635 46364777 4778 4779 4780 4729 4730 4731 47324677 4678 4679 4680 4629 4630 4631 46326789 6790 6791 6792 6741 6742 6743 67446889 6890 6891 6892 6841 6842 6843 68446793 6794 6795 6796 6745 6746 6747 6748Tabella 5. 14 – Set_Node_List Carico.114
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970Per applicare il carico in modo concentrato su ogni particella, si usa ilcomando Load_Noad_Set [12]. In questo modo si attribuisce ad ogni Set<strong>di</strong> no<strong>di</strong> la corrispondente Curva <strong>di</strong> Carico (Load Curve). Per tener contoche si sta passando da una pressione, e quin<strong>di</strong> una forza per unità <strong>di</strong>superficie, ad una forza concentrata, la curva <strong>di</strong> carico dovrà esseremoltiplicata per un fattore <strong>di</strong> scala, pari all’area <strong>di</strong> carico che compete adogni singola particella, che sarà pari a (2,5x2,5) cm 2 .*LOAD_NODE_SET$# nsid dof lcid sf cid m1 m2 m31 3 1 -6.250E-42 3 2 -6.250E-43 3 3 -6.250E-44 3 4 -6.250E-45 3 5 -6.250E-46 3 6 -6.250E-47 3 7 -6.250E-48 3 8 -6.250E-49 3 9 -6.250E-410 3 10 -6.250E-411 3 11 -6.250E-412 3 12 -6.250E-413 3 13 -6.250E-414 3 14 -6.250E-415 3 15 -6.250E-416 3 16 -6.250E-417 3 17 -6.250E-418 3 18 -6.250E-419 3 19 -6.250E-420 3 20 -6.250E-421 3 21 -6.250E-422 3 22 -6.250E-423 3 23 -6.250E-424 3 24 -6.250E-425 3 25 -6.250E-426 3 26 -6.250E-427 3 27 -6.250E-428 3 28 -6.250E-429 3 29 -6.250E-430 3 30 -6.250E-431 3 31 -6.250E-432 3 32 -6.250E-433 3 33 -6.250E-434 3 34 -6.250E-435 3 35 -6.250E-436 3 36 -6.250E-4Tabella 5. 15 – Load_Node_Set.Dove il dof in<strong>di</strong>ca la <strong>di</strong>rezione in cui il carico agisce, il fattore <strong>di</strong> scalainvece si pone negativo perché il carico è applicato verso il basso.115
CAPITOLO 5 – MODELLAZIONE NUMERICA CON LS-DYNA VERSION 970Le altre Card che completano il modello in SPH equivalgono a quelledefinite per il modello FEM.Per rendere più realistica la nostra modellazione, è stato consideratoanche l’effetto <strong>di</strong> Damping, impostando lo stesso al valore tipico per uncalcestruzzo del 5%. Questo comando consente, infatti, <strong>di</strong> considerare losmorzamento della velocità con la quale si muovono gli elementi.Tra le varie possibilità si è scelto il Damping_Frequency_Range [12],che consente <strong>di</strong> applicare l’effetto <strong>di</strong> smorzamento alla Partdell’elemento.*DAMPING_FREQUENCY_RANGE$# cdamp flow fhigh psid0.050000 0.100000 100.00000 1Tabella 5. 16 – Damping.Una volta assegnata la costante <strong>di</strong> Damping cdamp, si definisce unrange <strong>di</strong> frequenze, flow e fhigh, entro cui si considera l’effetto <strong>di</strong>smorzamento.116
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOCapitolo 6Legami Costitutivi del CalcestruzzoUn aspetto cruciale <strong>di</strong> questa modellazione risiede nella definizione dellecaratteristiche meccaniche del calcestruzzo. Il Software <strong>di</strong> calcolo LS-Dyna Version 970 implementa più <strong>di</strong> duecento Legami Costitutivi,ognuno dei quali impiegati per la modellazione <strong>di</strong> materiali <strong>di</strong>fferenti. Siha quin<strong>di</strong> la possibilità <strong>di</strong> scegliere tra un’ampia gamma <strong>di</strong> MaterialModel, secondo gli obiettivi che si vogliono perseguire e dei modelli chesi vogliono creare.In maniera molto sintetica è possibile classificare i Material Model infunzione del tipo <strong>di</strong> materiale da modellare, delle caratteristiche peculiariad essi associate, e dei meto<strong>di</strong> <strong>di</strong> <strong>di</strong>scretizzazione con essi compatibili. Inparticolar modo è possibile <strong>di</strong>stinguere modelli finalizzati allamodellazione <strong>di</strong> materiali plastici, compositi, ceramici, flui<strong>di</strong>, vetrosi,idro<strong>di</strong>namici, metallici, gommosi, schiumosi ed infine terreni ecalcestruzzi.Inoltre, nel caso specifico della modellazione realizzata era necessarioscegliere un Material Model che consentisse <strong>di</strong> considerare il così dettoeffetto <strong>di</strong> Strain-Rate, e il raggiungimento della con<strong>di</strong>zione <strong>di</strong> rottura(Failure) [12].Tra tutti i Material Model quelli che meglio rispondono a dette necessitàsono lo Pseudo Tensor (Mat_016) e il Concrete Damage (Mat_072).6.1 – Pseudo – Tensor(Mat_016)Nell’analisi <strong>di</strong> strutture sottoposte a carichi da esplosione e per gran<strong>di</strong>valori <strong>di</strong> deformazioni, i co<strong>di</strong>ci <strong>di</strong> calcolo Lagrangiani basati sulla teoria117
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOdegli elementi finiti, necessitano <strong>di</strong> uno strumento efficace per lamodellazione del comportamento del materiale.In particolar modo per la modellazione d’elementi in calcestruzzoarmato, l’implementazione <strong>di</strong> un’efficiente Material Model si è<strong>di</strong>mostrata complessa e variabile. Diversi modelli sono propriamenteadatti per descrivere il comportamento costitutivo del calcestruzzo, cheva dalla risposta elastica del materiale fino alla sua rottura. Tra questi siannovera lo Pseudo Tensor, che risulta essere uno dei migliori.Questo modello può essere impiegato definendo due superfici infunzione della pressione me<strong>di</strong>a p, una <strong>di</strong> rottura massima σ max , e l’altra <strong>di</strong>tensione residua σ r [13].Δσσmaxp= a0+a + a p12σr= a0 f+a1 fp+ a p2PFigura 6. 1 – Superficie <strong>di</strong> rottura massima e residua.È necessario associare al modello del materiale un equazione <strong>di</strong> stato,essa fornisce il valore corrente della pressione p come una funzione delladeformazione volumetrica. In funzione della pressione si definisce una118
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODurante la fase <strong>di</strong> carico iniziale o <strong>di</strong> ricarico, la parte deviatorica simantiene elastica fino a raggiungere la superficie iniziale <strong>di</strong> snervamento(Yeld Surface), raggiunta la quale può ancora aumentare fino araggiungere la superficie <strong>di</strong> rottura massima (Max Surface). Quando ilprovino <strong>di</strong> calcestruzzo è poi scaricato, la parte deviatorica del tensoredelle tensioni raggiunge la superficie <strong>di</strong> rottura residua (ResidualSurface). Così come mostrato nella seguente figura [13].Figura 6. 3 – Andamento della superficie <strong>di</strong> rottura corrente Δσ, in funzione dellatensione sferica p.La superficie <strong>di</strong> rottura corrente Δσ che limita la parte deviatorica dellostato tensionale, è definita come una combinazione lineare <strong>di</strong> duesuperfici, Δσ m e Δσ r , a loro volta definiti in funzione della tensionesferica p [13].Δ σ = η Δ σ + (1 − η )mΔσr121
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOvalori <strong>di</strong> p, esse non possono propriamente rappresentare il punto <strong>di</strong>transizione tra il comportamento duttile e quello fragile.Di seguito si descrive il significato delle superfici <strong>di</strong> rottura[13]:Figura 6. 4 – Superfici <strong>di</strong> Rottura.Compressive Meri<strong>di</strong>anLa Compressive Meri<strong>di</strong>an in<strong>di</strong>ca l’andamento della Δσ m , i dati per la suacostruzione si ottengono solitamente attraverso prove sperimentalicondotte su provini <strong>di</strong> calcestruzzo sottoposti a compressioni assiali nonconfinati, e prove <strong>di</strong> compressione tri-assiali con vari livelli <strong>di</strong>confinamento. I test usuali non forniscono in ogni modo risultati pervalori <strong>di</strong> pressione inferiori a f ’ c/3. Per il modello originale PseudoTensor, sono necessari almeno due livelli <strong>di</strong> confinamento <strong>di</strong>versi dazero affinché la Compressive Meri<strong>di</strong>an sia definita da tre parametri a 0 , a 1e a 2 . Questi tre parametri che definisco la superficie <strong>di</strong> rottura massima123
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOΔσ m , solitamente sovrastimano gli sforzi, quando sono estrapolati pervalori inferiori a f ’ c/3.Tensile Meri<strong>di</strong>anÈ noto che la Tensile Meri<strong>di</strong>an della superficie <strong>di</strong> rottura per ilcalcestruzzo è solitamente inferiore rispetto alla Compressive Meri<strong>di</strong>an.Dati sperimentali suggeriscono che il rapporto tra la Tensile eCompressive Meri<strong>di</strong>an, denotato da ψ, è compreso tra 0,5, quando lepressioni sono negative, e 1, per livelli <strong>di</strong> confinamento elevati.Tensile CutoffLa Tensile Cutoff è inserita proprio per cercare <strong>di</strong> limitare i <strong>di</strong>fetti delmodello per valori bassi <strong>di</strong> pressione, citati nella definizione dellaCompressive Meri<strong>di</strong>an. La Tensile Cutoff limita la tensione principalemassima allo sforzo <strong>di</strong> trazione f t . Ciò in ogni modo non risolve ilproblema per valori <strong>di</strong> tensione sferica compresa tra 0 e f ’ c/3.Pressure CutoffIl modello originale incorpora una Pressure Cutoff, che impe<strong>di</strong>sce allapressione <strong>di</strong> andare sotto il valore <strong>di</strong> f t /3. La Pressure Cutoff, non incideper le prove <strong>di</strong> trazione monoassiale, mentre limita la <strong>di</strong>fferenza <strong>di</strong>tensione principale al valore <strong>di</strong> f t /2 per una prova <strong>di</strong> trazione biassiale, ea f t /3 per una tri-assiale. Entrambi questi limiti contrastano con leevidenze sperimentali, le quali mostrano che in entrambi i casi, la<strong>di</strong>fferenza <strong>di</strong> tensione principale Δσ dovrebbe raggiungereapprossimativamente f t . Quantunque la Pressure Cutoff sia raggiunta, lostato delle tensioni corrente rimane in ogni modo inalterato.124
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOIl comportamento elastico del materiale è descritto con lo Pseudo Tensorme<strong>di</strong>ante la definizione dell’equazione <strong>di</strong> stato Tabulated Compaction(EOS8). Infatti, assegnando nell’EOS8 l’Unloa<strong>di</strong>ng Bulk Modulus che èuna costante <strong>di</strong> elasticità definita in funzione del Modulo <strong>di</strong> Young E, edel Rapporto <strong>di</strong> Poisson ν :K=E3 −( 1 2ν )automaticamente in funzione <strong>di</strong> K il programma definisce un'altracostante d’elasticità, che è il Modulo <strong>di</strong> elasticità a Taglio G.Ciononostante, lo Pseudo Tensor contiene una serie <strong>di</strong> <strong>di</strong>fetti, tra cuil’incapacità <strong>di</strong> considerare la <strong>di</strong>latazione a taglio, normalmente osservatasui provini <strong>di</strong> calcestruzzo sottoposti a sollecitazioni <strong>di</strong> compressione.Tali <strong>di</strong>fetti sono stati corretti me<strong>di</strong>ante l’introduzione del nuovo modelloConcrete Damage (Mat_072) [13].6.2 – Concrete Damage (Mat_072)Una prima <strong>di</strong>fferenza rispetto al modello originale Pseudo Tensor risiedenella definizione <strong>di</strong> una nuova Pressure Cutoff p c . Per valori negativi <strong>di</strong>pressione, la funzione <strong>di</strong> migrazione η, serve non solo per scalare lasuperficie <strong>di</strong> rottura corrente da quella massima a quella residua, maanche per aumentare la p c da –f t a 0. Ciò avviene controllando lapressione calcolata dall’equazione <strong>di</strong> stato, e facendola coincidere con p cse non sarà sod<strong>di</strong>sfatta la con<strong>di</strong>zione secondo la quale deve essere p ≥ p c[13].125
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODove p c è uguale a –f t , se non è raggiunta la superficie <strong>di</strong> rotturamassima, ed è uguale a –ηf t , se invece è raggiunta. Questa mo<strong>di</strong>fica puòquin<strong>di</strong> sovrascrivere la pressione calcolata dall’equazione <strong>di</strong> stato[13].pc=⎧⎨⎩− f− η fttL’altra innovazione riguarda le superfici <strong>di</strong> rottura. Nel ConcreteDamage, infatti, è inserita una terza superficie, in<strong>di</strong>pendente dalleprecedenti due. Tale superficie rappresenta quell’iniziale <strong>di</strong> snervamento,ed è definita in funzione <strong>di</strong> tre nuovi parametri a 0y , a 1y e a 2y , così comesegue [13]:Δ σy=a0y+a1yp+ a2ypPer quanto concerne le restanti due superfici, già viste nel modelloprecedente, anche in questo caso sono apportate delle mo<strong>di</strong>fiche. Datoche il calcestruzzo ha uno sforzo residuo in trazione nullo, si assume taleanche il parametro in<strong>di</strong>pendente dalla pressione p che definisce lasuperficie <strong>di</strong> rottura residua, a of = 0. Sempre a proposito della superficie<strong>di</strong> rottura residua, per considerare l’intersezione tra questa e quella <strong>di</strong>rottura massima in un punto <strong>di</strong> transizione tra il comportamento duttile equello fragile, s’inserisce un nuovo parametro a 2f , mentre nel modellooriginale questo parametro era uguale per entrambe le superfici.In conclusione la superficie residua adesso assume la seguenteespressione [13]:Δ σr=a1 f+pa2fp126
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZONel nuovo modello, la superficie <strong>di</strong> rottura corrente dopo aver raggiuntoquella <strong>di</strong> snervamento iniziale, e prima ancora <strong>di</strong> raggiungere quella <strong>di</strong>rottura massima, è definita come una combinazione lineare delle due:Δσ=η( Δ σm− Δ σy) + Δ σyDove il parametro η è sempre compreso tra 0 e 1, ed è ancora definitocome una funzione della misura <strong>di</strong> deformazione plastica effettiva λ.Una volta raggiunta la superficie massima, quella corrente <strong>di</strong> rottura èottenuta come interpolazione tra quella massima e quella residua:Δσ=η( Δ σm− Δ σr) + Δ σrNel nuovo modello, la funzione <strong>di</strong> danno η = η(λ), è assegnata inmaniera tabulata dall’utente come una serie <strong>di</strong> valori (η, λ). Al variare <strong>di</strong>λ si ottengono valori <strong>di</strong> η compresi comunque tra 0 e 1. Quando λ = 0anche η = 0, quando λ = λ m allora η = 1, e torna ad annullarsi, quando λassume valori maggiori <strong>di</strong> λ m [13].Finche λ non decresce, Δσ tende ad assumere i valori <strong>di</strong> Δσ y , Δσ m e Δσ r .Quando λ ≤ λ m , allora Δσ si ottiene come un’interpolazione lineare traΔσ y e Δσ m , viceversa quando λ > λ m , allora sarà data dall’interpolazionetra Δσ m e Δσ r [13].La superficie <strong>di</strong> rottura massima non subisce nessuna mo<strong>di</strong>fica rispetto aquella vista nel modello originale.Riassumendo, per il nuovo modello le tre superfici <strong>di</strong> rottura, quellamassima, residua e <strong>di</strong> snervamento, sono rispettivamente definite comesegue [13]:127
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOΔ σm=a0+a1p+ a2pΔ σr=a1 f+pa2fpΔ σy=a0y+a1yp+ a2ypIn prossimità del punto in cui si osserva la transizione tra ilcomportamento fragile e quello duttile del materiale, avremo che sia laΔσ y sia la Δσ r, saranno limitate dalla Δσ m [13].6.2.1 – Parametri che definiscono le superfici <strong>di</strong> rotturaVe<strong>di</strong>amo come si determinano i parametri a 0 , a 1 ed a 2 che definiscono lasuperficie <strong>di</strong> rottura massima Δσ m . Questi tre parametri dovrebberoessere determinati me<strong>di</strong>ante prove <strong>di</strong> laboratorio su provini <strong>di</strong>calcestruzzo sottoposti a sollecitazioni <strong>di</strong> compressione assiale, e prove<strong>di</strong> compressione tri-assiale per <strong>di</strong>versi livelli <strong>di</strong> confinamento.Purtuttavia è possibile ottenere una stima <strong>di</strong> questi tre valori anchenumericamente. Il primo dei tre, a 0 , rappresenta, infatti, il puntod’intersezione della superficie <strong>di</strong> rottura massima con l’asse delleor<strong>di</strong>nate, Δσ(p=0) = a 0 [13].Il secondo parametro, a 1 , si definisce come l’inverso del minimo dellafunzione Δσ:⎡⎢⎣ddpΔσ⎤⎥⎦p = 0=1a1128
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOInfine, per gran<strong>di</strong> valori <strong>di</strong> tensione sferica p, il denominatore delsecondo termine dell’equazione che definisce Δσ m, è governato daltermine a 2 p, in quanto a 1 <strong>di</strong>venta insignificante:Δσ−a0→1a2quandop→ ∞Per definire la superficie <strong>di</strong> snervamento iniziale Δσ y , è invecenecessario determinare i valori dei parametri a 0y , a 1y e a 2y . Da datisperimentali è possibile affermare che tale superficie sia il luogo deipunti per Δσ = 0,45Δσ m , per un percorso <strong>di</strong> compressione <strong>di</strong> tipo triassiale.Ciò vuol affermare che preso un generico punto <strong>di</strong> coor<strong>di</strong>nate (p,Δσ m ), appartenente alla superficie <strong>di</strong> rottura massima, il corrispondentepunto sulla superficie iniziale <strong>di</strong> snervamento (p ’ , Δσ y ) sarà definitocome:Δσy= 0,45ΔσDa cui p può essere espresso in funzione <strong>di</strong> p ’ , mentre nota l’espressione<strong>di</strong> Δσ m , Δσ y sarà calcolato come [13]:mep'=p −0,553ΔσmΔσy=⎛0,45⎜ a⎝0+a1p+ a2p⎞⎟⎠Quin<strong>di</strong>, assumendo p ’ = 0, avremo che Δσ y = a 0y , per ricavare gli altridue parametri sarà sufficiente risolvere un sistema <strong>di</strong> due equazioni nelledue incognite a 1y e a 2y .Quando non si conoscono le superfici <strong>di</strong> rottura per un nuovocalcestruzzo da modellare, per il qual è nota la sola resistenza acompressione del cls non confinato f ’ c,new, i parametri a 0n , a 1n ed a 2n , che129
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOdefiniscono la nuova superficie <strong>di</strong> rottura Δσ n , possono essere calcolati apartire dai parametri noti <strong>di</strong> un altro calcestruzzo f ’ c,old. In questo casoviene suggerito <strong>di</strong> definire un fattore <strong>di</strong> scala r come il rapporto tra leresistenze a compressione del calcestruzzo non confinato, del nuovo edel vecchio calcestruzzo [13]:r =I nuovi parametri sono quin<strong>di</strong> calcolati come:ff'c,new'c,oldaaa0n1n2n= a= a=1a02r/ rAllo stesso modo si può pensare <strong>di</strong> calcolare i parametri che definisconol’andamento della Yeld Surface (a 0y , a 1y ed a 2y ), mentre i coefficienti chedeterminano la Failure Surface (a 1f ed a 2f ), si pongono uguali ad a 1n eda 2n [13].A tal fine si fa riferimento alle caratteristiche meccaniche delcalcestruzzo impiegato per lo svolgimento <strong>di</strong> una prova sperimentalecondotta presso un centro <strong>di</strong> ricerca Svedese, per la quale si prevedevaun blocco <strong>di</strong> calcestruzzo ad elevata resistenza, sottoposto ad un caricoda impatto [19]. Le prove condotte sono state in seguito modellate con ilco<strong>di</strong>ce <strong>di</strong> calcolo LS-Dyna Version 960. Note le caratteristichemeccaniche del calcestruzzo modellato, e in particolar modo la suaresistenza a compressione f ’ c,old, ed altresì note i parametri assegnati nellaCard del Material Model Concrete Damage, alla luce <strong>di</strong> quanto detto inprecedenza si sono calcolati i parametri relativi al calcestruzzo damodellare f ’ c,new:130
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOOld MaterialCaratteristiche dei MaterialiNew MaterialE c [Gpa] 58 E c [Gpa] 17636643,45E c [Mpa] 58000 E c [Mpa] 17636,64f ' c,old[Mpa] 153 f ' c,new [Mpa] 13,79f ' c,old[Pa] 153000000 f ' c,new [Pa] 13786202,43Fattore <strong>di</strong> Scalar 0,090105898Parametri LS-Dyna Version 970a 0,old 5,06E+07 a 0,new 4,56E+06a 1,old 0,465 a 1,new = a 1f,new 0,465a 2,old 6,57E-10 a 2,new = a 2f,new 7,29E-09a 0y,old 2,28E+07 a 0y,new 2,05E+06a 1y,old 1,033 a 1y,new 1,033a 2y,old 1,46E-09 a 2y,new 1,62E-08Tabella 6. 2 – Parametri numerici che definiscono le superfici <strong>di</strong> rottura d’input perLS-Dyna.Durante la fase <strong>di</strong> carico, la superficie <strong>di</strong> rottura corrente Δσ, migra tra lasuperficie <strong>di</strong> rottura massima e una tra quella <strong>di</strong> snervamento iniziale e <strong>di</strong>rottura residua [13].Δσ=η( Δ σmax− Δ σmin) + Δ σminQuando λ ≤ λ m , allora Δσ min coincide con Δσ y , viceversa, quando λ > λ min tal caso Δσ min coincide con Δσ r . Allo stesso modo che per il ModelloOriginale Pseudo Tensor, anche in questo caso η si esprime come unafunzione <strong>di</strong> λ, che in<strong>di</strong>ca la deformazione plastica effettiva. L’unica<strong>di</strong>fferenza risiede nell’espressione <strong>di</strong> λ, che in questo caso varia aseconda che la parte sferica del tensore delle tensioni p, sia maggiore ominore <strong>di</strong> 0 [13].131
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZONell’originale Material Model (Mat_016), la misura della deformazioneplastica effettiva λ, è definita come segue [13]:λ=ε∫0p⎛⎜ 1⎝Dove l’incremento <strong>di</strong> deformazione plastica effettiva è dato da:+dεpfpt⎞⎟⎠b1dε = ( 2 / 3 ) εppijεpijNel Concrete Damage sono apportate due mo<strong>di</strong>fiche nel definire ilparametro λ. Innanzitutto, si introduce un fattore sperimentale r f , chetiene conto del miglioramento <strong>di</strong> velocità (rate enhancement), inoltre ilparametro b 1 è sostituito da b 2 per valori <strong>di</strong> pressione minori <strong>di</strong> 0 [13]:λ=⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩εε∫0∫0pprrff⎛⎜⎝⎛⎜⎝11d+d+εεprprffppfftt⎞⎟⎠⎞⎟⎠b 1b 2pp≥
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOeffetti <strong>di</strong> questo cambiamento, l’incremento del danno è moltiplicato daun fattore f d , definito come segue [13]:=⎧⎪1−⎨⎪⎩ 03 J20 ,1/pse0≤3 Jse2/ p3 J2
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOPer determinare l’andamento della funzione <strong>di</strong> danno η = η(λ), checonsente <strong>di</strong> definire la superficie <strong>di</strong> rottura corrente Δσ, è quin<strong>di</strong>necessario calcolare i tre parametri b 1 , b 2 e b 3 [13].I parametri b 2 e b 3 governano l’andamento del ramo <strong>di</strong> softening dellacurva tensio-deformativa del materiale, per un calcestruzzo sottoposto aduna prova <strong>di</strong> trazione rispettivamente monoassiale e tri-assiale, quando latensione si muove dalla superficie <strong>di</strong> rottura massima a quella residua.L’apertura delle fessure sul modello, sono in ogni modo <strong>di</strong>pendenti dalle<strong>di</strong>mensioni e dalle caratteristiche della Mesh. Un modo per eliminarequesta <strong>di</strong>pendenza è imporre che l’area sottesa alla curva σ−ε sia ugualea G f /h. Dove G f è l’energia <strong>di</strong> frattura, ed h la <strong>di</strong>mensione del singoloelemento che costituisce la Mesh. Quando la localizzazione della fessuracapita in un elemento, allora h coincide con w c , dove w c è l’ampiezzadella fessura, ed è tipicamente contenuta tra 1 e 6 volte la <strong>di</strong>mensionemassima degli inerti del calcestruzzo[13]. Invece, in accordo con i co<strong>di</strong>ciEuropei (CEB, FIP) l’energia <strong>di</strong> frattura varia tra 40 e 175 N/m [22].Questo modello assicura un’in<strong>di</strong>pendenza dalle <strong>di</strong>mensioni della Mesh,che consente <strong>di</strong> apprezzare anche l’apertura delle fessure sul modello.Ciononostante, la mappa topologica della Mesh potrebbe incideresull’orientamento delle fessure, sia in con<strong>di</strong>zioni statiche sia <strong>di</strong>namiche.Il parametro b 2 è definito facendo variare l’andamento della curva σ−ε,definita per una prova <strong>di</strong> trazione monoassiale, fino a che l’area sottesadalla curva non coincide con G f /h. Lo stesso proce<strong>di</strong>mento iterativo èeseguito anche nella determinazione <strong>di</strong> b 3 , con l’unica <strong>di</strong>fferenza che inquesto caso si fa affidamento ai dati sperimentali provenienti da unaprova <strong>di</strong> trazione tri-assiale idrostatica e non monoassiale. Questi due134
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOparametri sono <strong>di</strong> fondamentale importanza, quando l’elementoanalizzato è a debole armatura.Il parametro b 1 è determinato allo stesso modo che per i precedenti, inquesto caso il coefficiente numerico è tarato su dati sperimentaliprovenienti da test a compressione monoassiale al variare del livello <strong>di</strong>confinamento. Alla luce <strong>di</strong> quanto detto, la superficie <strong>di</strong> rottura correnteΔσ <strong>di</strong>pende in<strong>di</strong>rettamente dai tre parametri b 1 , b 2 e b 3 [13].È possibile, infatti, schematizzare le seguenti <strong>di</strong>pendenze:Δσ = f(η) → η = η(λ) → λ = f(b 1 o b 2 ), mentre l’incremento delparametro <strong>di</strong> danno Δλ = f(b 3 ).A loro volta b 1 , b 2 e b 3 si esprimono come una funzione <strong>di</strong> G f e h.Queste <strong>di</strong>pendenze sono implementate dallo stesso co<strong>di</strong>ce <strong>di</strong> calcolo LS-Dyna Version 970, al quale è necessario assegnare tra gli input chedefiniscono le caratteristiche del materiale, oltre ai parametri b 1 , b 2 e b 3 ,anche in maniera tabulata la curva <strong>di</strong> danno η = η(λ).Non avendo la possibilità <strong>di</strong> eseguire prove sperimentali finalizzate allacaratterizzazione dei materiali, si è costretti ad assumere per questi treparametri b 1 , b 2 e b 3 , tipici valori definiti per un calcestruzzo <strong>di</strong> scarsaqualità, al quale compete un basso valore d’Energia <strong>di</strong> Frattura G f , cosìcome per il calcestruzzo impiegato nello svolgimento delle provesperimentali modellate. A detti valori sarà associata la corrispondentefunzione <strong>di</strong> danno, definita così come descritto in precedenza:135
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOFunzione <strong>di</strong> Danno η = η(λ)1,210,80,60,40,200 0,01 0,02 0,03 0,04 0,05Grafico 6. 1 – Funzione <strong>di</strong> Danno, calcolata per b 1 = b 2 = b 3 = 0,1.Tra i due Material Model in precedenza descritti, Pseudo Tensor e ilConcrete Damage, per la modellazione del calcestruzzo si è deciso <strong>di</strong>impiegare questo ultimo. Essendo, infatti, il Concrete Damage unevoluzione dello Pseudo Tensor.Di seguito per semplicità d’esposizione si riporta la Card del MaterialModel così come è stata definita per la modellazione della piastra:*MAT_CONCRETE_DAMAGE_TITLEC.A.$# mid ro pr1 2500.0000 0.200000$# sigf a0 a1 a21.3790E+6 4.68E+06 0.465 7.11E-09$# a0y a1y a2y a1f a2f b1 b2 b32.11E+06 1.033 1.58E-08 0.465 7.29E-09 0.100000 0.100000 0.100000$# per er prr sigy etan lcp lcr0.00528 1.999E+11 0.300000 3.8820E+8 38 39$#lambda-1 lambda-2 lambda-3 lambda-4 lambda-5 lambda-6 lambda-7 lambda-80.000 0.02E-3 2.80E-03 41.0E-03$#lambda-9 lambda-10 lambda-11 lambda-12 lambda-130.000 0.000 0.000 0.000 0.000$# nu-1 nu-2 nu-3 nu-4 nu-5 nu-6 nu-7 nu-80.000 1.000000 0.150000 0.000Tabella 6. 3 – Input per LS-Dyna del material Concrete Damage, definiti per lamodellazione della piastra.136
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODove, oltre ai parametri in precedenza descritti e calcolati, a o , a 1 , a 2 , a oy ,a 1y , a 2y , a 1f , a 2f , b 1 , b 2 e b 3 , sono presenti altri parametri che definiscono lecaratteristiche del calcestruzzo:• mid è il numero identificativo del Material Model;• ro è il peso specifico del calcestruzzo;• pr è il Rapporto <strong>di</strong> Poisson;• sigf è la tensione <strong>di</strong> rottura a trazione del calcestruzzo, calcolatacome un decimo <strong>di</strong> quella a compressione f ’ c.Le caratteristiche dell’armatura meccanica sono invece:• per in<strong>di</strong>ca la percentuale <strong>di</strong> armatura nella sezione;• er è il Modulo <strong>di</strong> Elasticità longitu<strong>di</strong>nale <strong>di</strong> Young;• prr è il Rapporto <strong>di</strong> Poisson;• sigy è la tensione <strong>di</strong> snervamento dell’acciaio in con<strong>di</strong>zione <strong>di</strong>carico quasi statiche.Con lcp (load curve principal) e lcr (load curve rinforcement), sirichiamano rispettivamente le curve <strong>di</strong> Strain-Rate relative al materialeprincipale, il calcestruzzo, e al materiale <strong>di</strong> rinforzo, l’acciaio.Queste curve sono definite così come <strong>di</strong> seguito descritto [12].6.4 – Dynamic Increase Factor (DIF)Il Dynamic Increase Factor (DIF), è un coefficiente numericoa<strong>di</strong>mensionale, che moltiplicato per la resistenza meccanica delcalcestruzzo, calcolata in con<strong>di</strong>zioni <strong>di</strong> carico quasi statico, fornisce una137
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOmisura delle caratteristiche <strong>di</strong>namiche, al variare della velocità <strong>di</strong>deformazione ε (Strain Rate). La velocità <strong>di</strong> deformazione non è altroche la variazione della deformazione al variare del tempo [18].Per la simulazione numerica, è <strong>di</strong> fondamentale importanza definirel’andamento del DIF in funzione della velocità <strong>di</strong> deformazione.Trattandosi <strong>di</strong> un elemento strutturale in cemento armato, sottopostoall’azione <strong>di</strong>namica prodotta da un’esplosione, si avrà una velocità <strong>di</strong>deformazione molto elevate, comprese tra 10 sec -1 e 1000 sec -1 [17]. Pervalori così elevati <strong>di</strong> Strain-Rate, le evidenze sperimentali hannomostrato un incremento <strong>di</strong> resistenza del calcestruzzo sia a compressionema soprattutto a trazione. Il DIF a compressione in alcuni casi èmaggiore <strong>di</strong> 2, mentre per la resistenza a trazione può raggiungere valorimaggiori <strong>di</strong> 6 [17].Per l’armatura metallica <strong>di</strong> rinforzo, si può arrivare ad un incremento <strong>di</strong>resistenza maggiore del 50% [17].Questo incremento <strong>di</strong> resistenza determina quin<strong>di</strong> un miglioramento delcomportamento meccanico d’entrambi i materiali. Inoltre, essendo larisposta dell’elemento strutturale in c.a. molto <strong>di</strong>pendente dalcomportamento a trazione del calcestruzzo, l’aumento <strong>di</strong> resistenza atrazione, enfatizza l’importanza che assume la descrizione delcomportamento <strong>di</strong>namico del materiale.Volendo quin<strong>di</strong> considerare il cosiddetto effetto <strong>di</strong> Strain-Rate, nelcomportamento a compressione e a trazione del calcestruzzo, sottopostoad un carico <strong>di</strong>namico impulsivo, si è scelto <strong>di</strong> simulare numericamentela prova sperimentale impiegando il software LS-Dyna [11]. Infatti, tra i<strong>di</strong>versi legami costitutivi che si possono implementare con questo co<strong>di</strong>ce<strong>di</strong> calcolo strutturale, alcuni <strong>di</strong> questi forniscono la possibilità <strong>di</strong>138
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOdescrivere il comportamento costitutivo <strong>di</strong> un materiale in funzione dellavelocità <strong>di</strong> deformazione.Al variare del Material Model, scelto per la modellazione del materiale,il programma fornisce tre <strong>di</strong>verse opzioni nell’assegnare l’effetto <strong>di</strong>Strain-Rate [12]:• Cowper and Symonds.Questa prima scelta si fonda sulla teoria <strong>di</strong> Cowper and Symonds. Inquesto caso si assegnano nella Card che definisce le caratteristichedel materiale, due costanti C e p. In funzione delle quali il programmacalcola un fattore amplificativo (DIF) del tipo:1+⎛⎜⎜⎝•εCAl variare della velocità <strong>di</strong> deformazione ε , il fattore amplificativoche ne consegue, è moltiplicato per la resistenza meccanica delmateriale, migliorandone il comportamento sotto l’azione <strong>di</strong> carichi<strong>di</strong>namici.⎞⎟⎟⎠1p• Legame Tensione-Deformazione Parametrico.In questo caso, durante la fase d’input, s’inseriscono i tratti plasticidel legame costitutivo del materiale, ricavati per <strong>di</strong>versi valori <strong>di</strong> ε ,formando così una famiglia <strong>di</strong> legami costitutivi. In questo modo, alvariare della velocità <strong>di</strong> deformazione, il programma attinge dalegami costitutivi <strong>di</strong>versi, il valore della corrispondente tensione.139
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZO• Curva <strong>di</strong> Strain-Rate.Il modo più semplice per assegnare l’effetto <strong>di</strong> Strain-Rate, consistenel definire una curva che lega alla velocità <strong>di</strong> deformazione ilcorrispondente DIF. Definita e in seguito assegnata la Curva <strong>di</strong>Strain-Rate alla Card del Material Model, al variare della velocità <strong>di</strong>deformazione, il programma estrapola da questa curva ilcorrispondente valore del DIF. Questo ultimo moltiplica la tensione<strong>di</strong> rottura a trazione σ f , calcolata in con<strong>di</strong>zioni <strong>di</strong> carico Quasi-Statico, ed assegnata nella Card che definisce le caratteristichemeccaniche del materiale. Così facendo al variare della velocità <strong>di</strong>deformazione, e quin<strong>di</strong> del corrispondente DIF, si avranno valorivariabili <strong>di</strong> resistenza a trazione.Sia lo Pseudo-Tensor sia il Concrete-Damage, che si è scelto <strong>di</strong>impiegare nella modellazione del calcestruzzo, utilizzano quest’ultimapossibilità nell’assegnare l’effetto <strong>di</strong> Strain-Rate. Inoltre, me<strong>di</strong>antel’assegnazione <strong>di</strong> due curve ε –DIF, definite rispettivamente per ilcalcestruzzo e per l’acciaio, si avrà la possibilità <strong>di</strong> considerare ilfenomeno in maniera <strong>di</strong>saccoppiata per i due materiali, tra i quali siconsidera il calcestruzzo principale e l’armatura <strong>di</strong> rinforzo secondaria.Ovviamente, ciò presuppone la conoscenza delle curve <strong>di</strong> Strain-Rateper entrambi i materiali.6.4.1 – Definizione della Curva <strong>di</strong> Strain-RateNel definire l’andamento del DIF in funzione della velocità <strong>di</strong>deformazione, si è scelto <strong>di</strong> utilizzare il modello analitico proposto dalCEB-FIP Model Code 1990 [20]. Questo modello consente <strong>di</strong> calcolare,140
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOin funzione della velocità <strong>di</strong> deformazione, il valore numerico del DIFper il calcestruzzo, sia a trazione sia a compressione.6.4.2 – Origini della formulazione CEB-FIPLa formulazione proposta per il calcolo del DIF in funzione dellavelocità <strong>di</strong> deformazione, nasce ovviamente da osservazioni sperimentalie modelli numerici. Queste prove, condotte per caratterizzare ilcomportamento a compressione e a trazione del calcestruzzo, sottol’azione <strong>di</strong> carichi <strong>di</strong>namici, hanno evidenziato come l’effetto <strong>di</strong> Strain-Rate sul calcestruzzo, sia a trazione sia a compressione, si possaesprimere attraverso un fattore a<strong>di</strong>mensionale (DIF), inteso come ilrapporto tra lo sforzo <strong>di</strong>namico e quello statico. Le prove sono statecondotte sottoponendo un provino <strong>di</strong> calcestruzzo cilindrico, <strong>di</strong> cui sononote a priori le caratteristiche meccaniche, per una velocità <strong>di</strong>deformazione Quasi-Statica, ad un carico <strong>di</strong>namico-impulsivo. A <strong>di</strong>versiintervalli <strong>di</strong> velocità <strong>di</strong> deformazione si misurano valori <strong>di</strong>fferenti <strong>di</strong>sforzi <strong>di</strong> trazione o compressione <strong>di</strong>namici. Il DIF è semplicementecalcolato come rapporto tra le due caratteristiche meccaniche, quella<strong>di</strong>namica e quella statica. Operando un confronto tra i dati sperimentali<strong>di</strong>sponibili, e i risultati conseguiti nel definire la curva <strong>di</strong> Strain-Rate conil modello teorico raccomandato dal CEB-FIP, si è giunti allacalibrazione del Model Code 1990, secondo il quale il DIF per sforzi <strong>di</strong>compressione per il calcestruzzo sarà dato da [20].ffffccsccs⎛ ε ⎞=⎜ε⎟⎝ s⎠1.026α⎛ ε ⎞= γ⎜⎟s⎝ εs ⎠13perε ≤ 30 s -1per ε > 30 s -1141
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODove:• f cè lo sforzo <strong>di</strong> compressione <strong>di</strong>namico alla velocità <strong>di</strong>• f csfc•fcs• εdeformazione ε ;è lo sforzo <strong>di</strong> compressione statico alla velocità <strong>di</strong>deformazione εs ;300 sec -1 ;è il Dynamic Increase Factor (DIF);è la velocità <strong>di</strong> deformazione compresa tra 30 x 10 -6 sec -1 e• εs = 30 x 10 -6 sec -1 , è la velocità <strong>di</strong> deformazione quasi statica acompressione;• log γ s= 6.156 α − 2 ⇒6 .156 α − 0 .492γ s= 10;1• α =; f co = 10 Mpa⎛ f ⎞⎜ +cs5 9⎟⎝ fco ⎠Questa formulazione analitica, valida per il solo calcestruzzo incompressione, è stata ricavata su basi sperimentali.Invece, il DIF per gli sforzi <strong>di</strong> trazione è dato da [20]:ffffttstts⎛ ε ⎞=⎜ε⎟⎝ s⎠1.016δ⎛ ε ⎞= β⎜⎟⎝ εs ⎠13perε ≤ 30 s -1per ε > 30 s -1142
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODove:• f tè lo sforzo <strong>di</strong> trazione <strong>di</strong>namico alla velocità <strong>di</strong>• f tsdeformazione ε ;εs ;ft•fts• ε300 sec -1 ;è lo sforzo <strong>di</strong> trazione statico alla velocità <strong>di</strong> deformazioneè il Dynamic Increase Factor (DIF);è la velocità <strong>di</strong> deformazione compresa tra 3 x 10 -6 sec -1 e• εs = 3 x 10 -6 sec -1 , è la velocità <strong>di</strong> deformazione quasi statica atrazione;• log β = 7.11δ− 2. 33⇒7 . 11 δ − 2 . 33β = 10;1• δ =; f co = 10 Mpa⎛ fts⎞⎜10+ 6⎟⎝ fco ⎠Da queste espressioni si evince che, la relazione che sussiste tra il DIF ela velocità <strong>di</strong> deformazioneε , riportate in un grafico e in scalalogaritmica, è <strong>di</strong> tipo bilineare, con un cambio d’inclinazione che si haper ε = 30 sec -1 . Inoltre, più scadente è la qualità del calcestruzzoadottato, e maggiore sarà il valore del DIF, essendo sempre più piccolo ilvalore dello sforzo <strong>di</strong> trazione o <strong>di</strong> compressione, misurato per unacon<strong>di</strong>zione <strong>di</strong> carico Quasi-Statica [20].143
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOQuesto modello è stato impiegato per la simulazione numerica, nellepagine a seguire si riportano in maniera schematica i risultati cosìottenuti:Compres. ε s ' [sec -1 ] 30x10 -6Trazione ε s ' [sec -1 ] 3x10 -6Tabella 6. 4 – Velocità <strong>di</strong> deformazione quasi statica.f cs [Mpa] 13,79f cs [Mpa] 1,38f co [Mpa] 10,00α 0,057γ 0,023δ 0,092β 0,021Tabella 6. 5 – Caratteristiche statiche del calcestruzzo e parametri numerici utilizzatiper il calcolo delle curve <strong>di</strong> Strain-Rate.Si riportano <strong>di</strong> seguito le Curve <strong>di</strong> Strain-Rate impiegate nellamodellazione:ε' [sec -1 ]DIF CalcestruzzoDIFcompressioneDIF trazione0,000003 ------ 1,0003,00E-05 1,000 1,2413,00E-04 1,145 1,5413,00E-03 1,312 1,9123,00E-02 1,503 2,3730,3 1,721 2,9463 1,971 3,6566 2,053 3,9029 2,103 4,05312 2,139 4,16415 2,167 4,25218 2,191 4,32621 2,211 4,38924 2,228 4,44427 2,244 4,49330 2,258 4,53832 2,307 4,670144
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZO34 2,354 4,76636 2,399 4,85738 2,443 4,94640 2,485 5,03142 2,526 5,11444 2,565 5,19346 2,603 5,27148 2,640 5,34650 2,677 5,42052 2,712 5,49154 2,746 5,56056 2,780 5,62858 2,812 5,69460 2,844 5,75962 2,876 5,82264 2,906 5,88466 2,936 5,94568 2,966 6,00570 2,994 6,06372 3,023 6,12074 3,050 6,17676 3,078 6,23178 3,104 6,28580 3,131 6,33982 3,156 6,39184 3,182 6,44386 3,207 6,49388 3,232 6,54390 3,256 6,59392 3,280 6,64194 3,304 6,68996 3,327 6,73698 3,350 6,782100 3,372 6,828Tabella 6. 6 – Curve <strong>di</strong> Strain-Rate per il calcestruzzo a Trazione e Compressioneadottate nella modellazione.145
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODIF (Calcestruzzo)10,0DIFCompressioneTrazione1,01E-05 0,0001 0,001 0,01 0,1 1 10 100 1000ε 'Grafico 6. 2 – Funzione Bilineare in scala logaritmica del DIF per il calcestruzzo.Dal grafico precedente si può facilmente osservare come l’aumento <strong>di</strong>resistenza a trazione sia più del doppio <strong>di</strong> quello a compressione, e<strong>di</strong>noltre sì evidenzia l’andamento della curva bilineare, con il cambiod’inclinazione intorno al valore <strong>di</strong> ε = 30 sec -1 .Per convenzione il co<strong>di</strong>ce <strong>di</strong> calcolo LS-DYNA considera positive ledeformazioni <strong>di</strong> trazione e negative quelle <strong>di</strong> compressione [11], e cosìanche le rispettive velocità <strong>di</strong> deformazione. In conclusione, si è definitaun'unica curva <strong>di</strong> Strain-Rate, assegnando per valori negativi <strong>di</strong> velocità<strong>di</strong> deformazione l’andamento del DIF a compressione, e per valoripositivi l’andamento del DIF a trazione:146
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOGrafico 6. 3 – Input in LS-Dyna della Curva <strong>di</strong> Strain-Rate a Compressione eTrazione per il calcestruzzo.Avendo già premesso che il Material Model scelto per la simulazionenumerica permette <strong>di</strong> considerare in maniera <strong>di</strong>saccoppiata gli effettibenefici <strong>di</strong> Strain-Rate per l’acciaio e per il calcestruzzo, si dovràdefinire la curva ε -DIF anche per l’acciaio. Per gli acciai da armaturalenta, il bollettino n° 187 del CEB-FIP suggerisce una formulazioneanalitica per il calcolo del DIF, basato sul modello <strong>di</strong> Johnson and Cook.Questo ultimo, infatti, è tra tutti i modelli teorici, quello che più siavvicina ai risultati dei test sperimentali condotti su questo tipo <strong>di</strong>materiale.Si ottengono così, per un tipico acciaio da carpenteria laminato a caldo laseguente formulazione, valida per la sola tensione <strong>di</strong> snervamento:ffydys⎛ ⎞ ⎛ ⎞⎜6.0 ⎟ε= 1+ln⎜⎟⎝ f ⎠ ⎝ ysε0⎠147
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODove: f yd è la tensione <strong>di</strong> snervamento <strong>di</strong>namica;f ysεε0è la tensione <strong>di</strong> snervamento statica;è la velocità <strong>di</strong> deformazione;è la velocità <strong>di</strong> deformazione Quasi-Statica, e siassume pari a 5·10 -10 s -1 ;Il DIF adoperato per l’acciaio sarà quin<strong>di</strong> dato da:DIF (Acciaio)f ys [Mpa] 388,17ε 0 ' [sec -1 ] 5E-10ε' [sec -1 ] Ln(ε/ε 0 )0,0000000005 0,000 1,0003,00E-05 11,002 1,1703,00E-04 13,305 1,2063,00E-03 15,607 1,2413,00E-02 17,910 1,2770,3 20,212 1,3122 22,110 1,3426 23,208 1,35910 23,719 1,36714 24,055 1,37218 24,307 1,37622 24,507 1,37926 24,675 1,38130 24,818 1,38435 24,972 1,38640 25,105 1,38845 25,223 1,39050 25,328 1,39255 25,424 1,39360 25,511 1,39465 25,591 1,39670 25,665 1,39775 25,734 1,39880 25,798 1,39985 25,859 1,40090 25,916 1,40195 25,970 1,401100 26,022 1,402104 26,061 1,403148
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZO108 26,099 1,403112 26,135 1,404116 26,170 1,405120 26,204 1,405124 26,237 1,406128 26,268 1,406132 26,299 1,407136 26,329 1,407140 26,358 1,407144 26,386 1,408148 26,414 1,408152 26,440 1,409156 26,466 1,409160 26,492 1,409164 26,516 1,410168 26,540 1,410172 26,564 1,411174 26,575 1,411Tabella 6. 7 – DIF a trazione adoperato per L’acciaio.DIF (Acciaio)DIF1,61,51,41,31,21,11,00 20 40 60 80 100 120 140 160ε 'TrazioneGrafico 6. 4 – Curva <strong>di</strong> Strain-Rate a trazione adoperato per l’acciaio.6.3 – Equation of State Form 8 (Tabulated Compaction)Nel momento in cui si sceglie <strong>di</strong> adottare i Material Model PseudoTensor o Concrete Damage per la modellazione del calcestruzzo, inentrambi i casi sarà necessario per la definizione del modello, associare aquesti materiali un equazione <strong>di</strong> stato [11].149
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZONella trattazione teorica dei due Material Model, si fa espressa richiestadell’impiego dell’Equazione <strong>di</strong> Stato Tabulated Compaction. Questaequazione esprime la Pressione Me<strong>di</strong>a p in funzione della DeformazioneVolumetrica ε v [11].p = C( ε ) + γ T ( ε ) E ( 6 .1)vvLa pressione così calcolata sarà impiegata dal software per la definizionedelle varie superfici <strong>di</strong> rottura, in precedenza introdotte nella descrizionedei Legami costitutivi del calcestruzzo.Quella che in<strong>di</strong>cata con p non è altro che la parte sferica del tensore delletensioni, o tensione sferica, definita come il valore me<strong>di</strong>o delle tensioninormali principali σ 1 , σ 2 e σ 3 .Compito dell’utente è quello <strong>di</strong> assegnare in maniera tabulata i parametriC, γ, T ed E, da cui <strong>di</strong>pende la pressione.Dove:• C: Pressione espressa in Pa;• γ: Coefficiente numerico a<strong>di</strong>mensionale;• T: temperatura espressa in gra<strong>di</strong> Kelvin;• E: è l’energia interna.Invece, la deformazione volumetrica ε v è definita come il logaritmonaturale del volume relativo V (LnV = ε v ).La deformazione volumetrica ε v <strong>di</strong> un elemento solido, quale ad esempioun semplice prisma <strong>di</strong> <strong>di</strong>mensioni iniziali x 0 , y 0 e z 0 , definite in unsistema <strong>di</strong> riferimento (x, y, z), si può calcolare come:ΔVV−0εv= = = ε1+ ε2+V0V0Vε3150
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZODove:• V 0 è il volume iniziale, V 0 = (x 0 y 0 z 0 );• ΔV è la variazione <strong>di</strong> volume, ΔV = Δx Δy ΔzΔx = ε x x o ; Δy = ε y y o ; Δz = ε z z o ;• V è il volume finale o relativo, V = V 0 + ΔV;Pertanto, il volume relativo V, da cui <strong>di</strong>pende la deformazionevolumetrica ε v , si esprime come:V = (x 0 y 0 z 0 ) + [(ε x x o )(ε y y o )(ε z z o )]Attraverso semplici passaggi matematici, e semplificando i terminid’or<strong>di</strong>ne superiore, si giunge alla seguente conclusione:V = V 0 [1 + ε x + ε y + ε z ] ⇒ V = V 0 [1 + ε v ]Sapendo che la deformazione volumetrica si esprime come somma delletre deformazioni normali.In con<strong>di</strong>zioni <strong>di</strong> simmetria assiale le due deformazioni ra<strong>di</strong>ali ε x e ε ysono tra loro uguali, quin<strong>di</strong>:ε v = ε z + 2 ε xsapendo che il coefficiente <strong>di</strong> Poisson ν, esprime il rapporto che sussistetra deformazione assiale e quella ra<strong>di</strong>ale, quest’ultima si esprime infunzione <strong>di</strong> quell’assiale come:ε x = −ν ε z ⇒ ε v = ε z (1- 2ν)151
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOavendo assunto per convenzioni, positive le deformazioni assiali se <strong>di</strong>contrazione, e negative le rispettive deformazioni ra<strong>di</strong>ali <strong>di</strong> <strong>di</strong>latazione.In definitiva il volume relativo V si esprime come:V = V 0 [1 + ε z (1- 2ν)]Per semplicità si assumerà un volume iniziale unitario (V 0 = 1).Nella Card dell’EOS8 si possono tabulare fino ad un massimo <strong>di</strong> 10valori <strong>di</strong> LnV. Ciononostante, anche soli due valori sono sufficienti perottenere un’estrapolazione della pressione [11].L’andamento della pressione in funzione della deformazionevolumetrica, è illustrato nel successivo grafico [11]:Grafico 6. 5 – Legame costitutivo Pressione-Deformazione Volumetrica.Durante la fase <strong>di</strong> carico, la pressione segue l’andamento dettatodall’equazione 6.1, quando il materiale è invece scaricato, la pressionesegue un percorso deformativo, la cui inclinazione è data dal Bulk152
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOModulus <strong>di</strong> Unloa<strong>di</strong>ng, che è a sua volta funzione della deformazionevolumetrica.Il Bulk Modulus è una costante <strong>di</strong> elasticità del materiale, definita infunzione del Modulo <strong>di</strong> Young e del Rapporto <strong>di</strong> Poisson:K=E3 −( 1 2υ )Il Bulk Modulus viene calcolato in funzione del Modulo <strong>di</strong> Young<strong>di</strong>namico E d , allo Strain-Rate <strong>di</strong> 400 sec -1 , essendo questo il massimovalore <strong>di</strong> velocità <strong>di</strong> deformazione che si consegue nella modellazionenumerica, secondo CEB-FIP Model Code 1990 [20].ν 0,2ε' [sec -1 ] 400,00Es [Mpa] 17636,64Ed [Mpa] 27018,69Ku [Pa]1,501E+10Tabella 6. 8 – Bulk Modulus.Ad ogni valore <strong>di</strong> ε v in maniera tabulata è associato nella Carddell’Equazione <strong>di</strong> Stato il valore costante <strong>di</strong> K, così come sopra definito.Scaricando il materiale la pressione si riduce fino ad annullarsi, e siosserva un valore residuo <strong>di</strong> deformazione volumetrica. Durante la fase<strong>di</strong> ricarico, la pressione aumenta seguendo lo stesso percorsodeformativo, fino a ricongiungersi con la curva descritta dall’equazione6.1, nello stesso punto in cui inizia la fase <strong>di</strong> scarico, per poi continuaread aumentare.153
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOAssumendo γ = 0, l’Equazione <strong>di</strong> Stato si riduce in una forma piùsemplice:p = C( ε )vIn questo modo per definire l’Equazione <strong>di</strong> Stato sarà sufficienteassegnare, in maniera tabulata, ad ogni valore <strong>di</strong> ε v il corrispondentevalore <strong>di</strong> pressione p.Non avendo a <strong>di</strong>sposizione dati provenienti da prove sperimentali,finalizzate alla caratterizzazione dei materiali impiegati per losvolgimento della prova, si è costretti a ricavare numericamente questolegame costitutivo del calcestruzzo (ε v – p).A tal fine si è utilizzato il modello numerico Microplane Model forBrittle-Plastic Material, proposto da Bažant Z P, Professore presso il<strong>Dipartimento</strong> d’Ingegneria Civile, della Northwestern University,Evanston [21].Il modello formulato da Bažant e Prat nell’1988, è stato calibrato everificato su base sperimentale, comparando i risultati numerici con irisultati <strong>di</strong> <strong>di</strong>verse prove <strong>di</strong> compressione tri-assiali.Le superfici <strong>di</strong> rottura sono definite dalle stesse funzioni utilizzate nelMicroplane Model <strong>di</strong> Bažant and Prat 1988, per la relazione tensiodeformativavolumetrica e deviatorica. A noi interessa definire larelazione <strong>di</strong> tipo volumetrica, che sussiste tra la tensione e ladeformazione (σ v , ε v ).Nella teoria classica della plasticità, una volta definita la superficie <strong>di</strong>snervamento (Yeld Surface), la deformazione plastica inizia a crescerenel momento in cui la tensione raggiunge detta superficie. Invece, nelmodello proposto le regioni elastiche e plastiche non sono separate, si154
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOassume quin<strong>di</strong> che la transizione continua della superficie <strong>di</strong> rottura(Failure Surface) tra le due regioni, avvenga me<strong>di</strong>ante una deformazioneplastica equivalente [21].La relazione tra tensione e deformazione volumetrica si può definireme<strong>di</strong>ante la seguente relazione:σfv'c=1Ec− 2υ⎡⎢⎢⎣⎛⎜⎝1+εapl⎞⎟⎠− s+⎛ ε⎜⎝ bpl⎞⎟⎠t⎤⎥ ε⎥⎦plDove:• σ v è la tensione volumetrica, che in con<strong>di</strong>zione <strong>di</strong> caricoidrostatiche sarà equivalente alla sola σ 3 . Essendo σ v = p = (σ 1 +σ 2 + σ 3 )/3, in con<strong>di</strong>zioni idrostatiche le tre tensioni principali sonouguali tra loro, quin<strong>di</strong> p = σ v = σ 3 .• ε pl è la deformazione plastica. Sapendo che la deformazionevolumetrica è somma delle due aliquote, plastica ed elastica, saràε pl = ε v – ε el . La deformazione elastica ε el , viene calcolata comerapporto tra la pressione p, incognita del problema, e il BulkModulus, in precedenza calcolato.• f ’ c è la resistenza a compressione del calcestruzzo nonconfinato. Il vantaggio nell’utilizzare questo metodo risiedeproprio nella possibilità d’a<strong>di</strong>mensionalizzare la tensione σ vrispetto alle caratteristiche meccaniche del calcestruzzo, espresseme<strong>di</strong>ante il parametro f ’ c.• a, b, s e t sono coefficienti numerici a<strong>di</strong>mensionali, definitime<strong>di</strong>ante prove sperimentali. Nel momento in cui si definisce lasuperficie <strong>di</strong> rottura relativa ad uno stato tensionale idrostatico, talicoefficienti sono determinati me<strong>di</strong>ante i risultati <strong>di</strong> prove155
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOidrostatiche tri-assiali. Si è scelto <strong>di</strong> utilizzare i coefficienti definitida Green and Swanson:a 0,000025b 2,5s 0,8t 1,15Tabella 6. 9 – Coefficienti numerici <strong>di</strong> Green and Swanson.All’equazione così descritta compete la seguente curva tensiodeformativavolumetrica [21]:Figura 6. 5 – Legame costitutivo Tensione-Deformazione Volumetrica.Fissato un valore <strong>di</strong> deformazione volumetrica ε v , si calcola quellaplastica ε pl come:εpl= εv− εeldove εel=pKDato che la pressione p, relativa alla deformazione volumetrica fissata, èl’incognita, sarà necessario ipotizzare un valore iniziale <strong>di</strong> pressione<strong>di</strong>verso da zero. Il valore <strong>di</strong> pressione p, per il quale si annulla laseguente <strong>di</strong>fferenza, sarà la soluzione del problema:156
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZO− stp E ⎡ ⎛ ε⎤pl ⎞ ⎛ εcpl ⎞− ⎢ ⎜ 1 + ⎟ + ⎜ ⎟ ⎥ ε' 1 − 2 ⎢⎥= plfcυ⎣ ⎝ a ⎠ ⎝ b ⎠ ⎦0Alla deformazione volumetrica ε v corrisponde il valore <strong>di</strong> pressione p,per il quale la precedente <strong>di</strong>fferenza si annulla.Iterando questo proce<strong>di</strong>mento per sette valori <strong>di</strong>fferenti <strong>di</strong> ε v , siottengono i seguenti risultati numerici:Legame p - ε vε vp [Mpa]0,000000 0,000E+000,007009 4,430E+010,028545 1,131E+020,049701 2,241E+020,060903 2,959E+020,070039 3,595E+020,134452 896,27Tabella 6. 10 – Risultati Numerici del legame costitutivo calcolato.157
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOLegame P - ε v1000,0900,0800,0700,0-P [Mpa600,0500,0400,0300,0200,0100,00,00,000 0,020 0,040 0,060 0,080 0,100 0,120 0,140 0,160−εvGrafico 6. 6 – Legame Tensio-Deformativo Volumetrico.In funzione della deformazione volumetrica, si calcola il volume relativoV, cosi come descritto in precedenza, se ne calcola il logaritmo naturaleLnV, e si associa a lui il corrispondente valore <strong>di</strong> pressione p, espressa inPa, così come richiesto nella Card dell’Equation of State [11].V lnV P [Pa]1,0000000 0,000000 0,0000000000,9929907 -0,007034 44300397,980,9714553 -0,028960 113129376,660,9502986 -0,050979 224085069,190,9390965 -0,062837 295858999,460,9299607 -0,072613 359539685,410,8655484 -0,144392 896273020,00Tabella 6. 11 – Valori Tabulati dell’equazione <strong>di</strong> stato.158
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOEquazione <strong>di</strong> Stato 81,E+099,E+088,E+087,E+08P[Pa]6,E+085,E+084,E+083,E+082,E+081,E+080,E+00-0,200 -0,150 -0,100 -0,050 0,000lnVEOS8Grafico 6. 7 – Equazione <strong>di</strong> Stato assegnata come input in LS-Dyna, per lamodellazione della piastra in c.a.Per una Card dell’Equation of State che si va così a comporre:*EOS_TABULATED_COMPACTION$# eosid gama e0 vo1 0.000 0.000 1.000000$# ev1 ev2 ev3 ev4 ev50.000 -0.00703000 -0.02896000 -0.05098000 -0.06284000$# ev6 ev7 ev8 ev9 ev10-0.07261000 -0.14439000$# c1 c2 c3 c4 c50.000 4.4300396e+007 1.1312938e+008 2.2408507e+008 2.9585901e+008$# c6 c7 c8 c9 c103.5953968e+008 8.9627302e+008$# t1 t2 t3 t4 t50.000 0.000 0.000 0.000 0.000$# t6 t7 t8 t9 t100.000 0.000 0.000 0.000 0.000$# k1 k2 k3 k4 k51.5010385e+010 1.5010385e+010 1.5010385e+010 1.5010385e+010 1.5010385e+010$# k6 k7 k8 k9 k101.5010385e+010 1.5010385e+010Tabella 6. 12 – Input per LS-Dyna dell’equazione <strong>di</strong> stato Tabulated Compaction.159
CAPITOLO 6 – LEGAMI COSTITUTIVI DEL CALCESTRUZZOLe Card così definite per il Concrete Damage, il DIF dei materialiimpiegati, e l’Equation of State, si ripeteranno identicamente nei <strong>di</strong>versimodelli realizzati, sia in FEM sia in SPH.160
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHECapitolo 7Risultati delle Simulazioni NumericheIn conclusione si è svolto uno stu<strong>di</strong>o parametrico tra i modelli realizzaticon i due meto<strong>di</strong> descritti, FEM e SPH. Tale stu<strong>di</strong>o è reso possibile dalleevidenze sperimentali a <strong>di</strong>sposizione. Operando, infatti, un confronto trai risultati numerici forniti dalla modellazione, e quelli risultanti dalleprove sperimentali realmente condotte, sarà possibile valutare quale deidue meto<strong>di</strong> fornisce risultati numerici quanto più prossimi a quellisperimentali.Per ogni prova sperimentale si avranno due modelli, uno realizzato inFEM e l’altro in SPH, entrambi costruiti secondo le modalità descrittenel corso della tesi.Per ogni elemento in cui è stata sud<strong>di</strong>visa la piastra, che sia questo unElement Solid o un Element SPH, si potranno leggere una seried’informazioni al variare del tempo.Queste ad esempio possono essere le Tensioni, gli Spostamenti e leVelocità del singolo elemento, misurate lungo gli assi del sistema <strong>di</strong>riferimento cartesiano, o le rispettive risultanti <strong>di</strong> spostamento e velocità.Il co<strong>di</strong>ce <strong>di</strong> calcolo consente anche <strong>di</strong> osservare dei risultati inerenti alcomportamento complessivo dell’intero elemento strutturale. A riguardosi possono misurare l’Energia Cinetica, Interna e Totale, lo Spostamento,la Velocità e l’Accelerazione del corpo rigido, nelle <strong>di</strong>rezioni del sistema<strong>di</strong> riferimento cartesiano, e le rispettive risultanti.Per i singoli no<strong>di</strong> si possono avere delle misure riguardanti leCoor<strong>di</strong>nate, gli Spostamenti, le Velocità, le Accelerazioni, e gliSpostamenti Relativi.161
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHE7.1 – Prova Sperimentale I e IIPer queste prime due con<strong>di</strong>zioni <strong>di</strong> carico, le prove sperimentali nonhanno mostrato risultati apprezzabili o quantificabili numericamente.In questi due casi sarà quin<strong>di</strong> sufficiente, per verificare la veri<strong>di</strong>cità dellamodellazione, osservare che non si verifichino spostamenti,deformazioni o fessure <strong>di</strong> ampiezze apprezzabili sui modelli realizzati.In entrambi i casi si è stabilito un tempo <strong>di</strong> analisi <strong>di</strong> 0,1 sec, sud<strong>di</strong>viso inun numero complessivo <strong>di</strong> 52 Step. Ciò significa che il softwarerestituirà un output del calcolo effettuato ogni 0,002 sec.Per i modelli realizzati in SPH, tenendo presente che questo metodoimpiega un tempo maggiore per convergere numericamente, ad<strong>di</strong>fferenza del FEM, in questo caso si sceglierà un tempo <strong>di</strong> analisi <strong>di</strong> 0,2sec, per un totale 102 Step, uno ogni 0,002 sec.Ai fini della modellazione, e alla luce delle evidenze mostrate dalleprove sperimentali, si è scelto <strong>di</strong> evidenziare la Deformazione PlasticaEffettiva (Effective Plastic Strain), come risultato conseguito dallamodellazione delle prime due con<strong>di</strong>zioni <strong>di</strong> carico. Non avendo lapossibilità <strong>di</strong> effettuare nessun confronto numerico con i risultati dellaprova realizzata in laboratorio, in questo caso si preferisce mettere inevidenza le <strong>di</strong>fferenze che sussistono tra gli stessi modelli realizzati inFEM e in SPH. Abbiamo quin<strong>di</strong> confrontato allo stesso istante <strong>di</strong> tempot = 0,1 sec, l’andamento della deformazione plastica effettiva,all’intradosso e all’estradosso della piastra.In maniera sintetica si riportano <strong>di</strong> seguito i risultati conseguiti per i duemodelli:162
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHE• Modello FEM, sud<strong>di</strong>visione della piastra in 11520 Element_Solid,Prova 1:Figura 7. 1 – Effective Plastic Strain misurato all’estradosso della piastra, Prova 1.Figura 7. 2 – Effective Plastic Strain misurato all’intradosso della piastra, Prova 1.163
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEGrafico 7. 1 - Spostamento Residuo, misurato nel centro della piastra all’estradosso.• Modello FEM, sud<strong>di</strong>visione della piastra in 11520 Element_Solid,Prova 2:Figura 7. 3 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 2.164
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 4 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 2.Grafico 7. 2 - Spostamento Residuo, misurato nel centro della piastra all’estradosso.165
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHE• Modello SPH, sud<strong>di</strong>visione della piastra in 11520 Element_SPH,Prova 1:Figura 7. 5 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 1.166
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 6 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 1.Grafico 7. 3 - Spostamento Residuo, misurato nel centro della piastra all’intradosso.167
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHE• Modello SPH, sud<strong>di</strong>visione della piastra in 11520 Element_SPH,Prova 2:Figura 7. 7 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 2.Figura 7. 8 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 2.168
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEGrafico 7. 4 - Spostamento Residuo, misurato nel centro della piastra all’intradosso.7.2 – Prova Sperimentale IIILa terza con<strong>di</strong>zione <strong>di</strong> carico, è quella che consente <strong>di</strong> osservaresperimentalmente i risultati più interessanti. Infatti, in questo caso sihanno misure effettuate al termine della prova, relative allo spostamentoresiduo valutato nel centro della piastra, e sulla mezzeria del bordoesterno non vincolato. Inoltre, si ha anche la misura della massimaampiezza della fessura, che si manifesta all’intradosso della piastra, pereffetto dei carichi <strong>di</strong>namici a cui è stata sottoposta.Si ha quin<strong>di</strong> la possibilità <strong>di</strong> operare un confronto tra i risultati conseguitinumericamente, me<strong>di</strong>ante la modellazione, e quelli derivanti dalla provasperimentale, eseguita in laboratorio.169
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEIn questo modo si può verificare quale tra i due modelli, realizzati con imeto<strong>di</strong> FEM e SPH, meglio approssima i dati sperimentali a<strong>di</strong>sposizione.A tal fine, si misurerà lungo l’asse Z lo spostamento che la piastrasubisce nel centro e sul bordo, ed infine l’ampiezza della fessura che sipresenta centralmente all’intradosso dell’elemento strutturale.La prova sperimentale ha evidenziato i seguenti risultati:Figura 7. 9 – Immagine della piastra in seguito alla terza prova.W c [mm] Z r,c [cm] Z r,b [cm]3 2,1 1,1Tabella 7. 1 - Risultati numerici della terza Prova Sperimentale realizzata.Dove con W c s’in<strong>di</strong>ca l’ampiezza della fessura misurata, con Z r,c , Z r,b , siin<strong>di</strong>cano rispettivamente gli spostamenti misurati lungo l’asse Z inprossimità del centro e della mezzeria del bordo esterno non vincolatodella piastra.170
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHE• Modello FEM, sud<strong>di</strong>visione della piastra in 11520 Element_Solid,Prova 3:Così come per le prime due prove, anche in questo caso si è scelto untempo d’analisi <strong>di</strong> appena 0,1 sec. Si può, infatti, osservare che il metodonumerico utilizzato, converge asintoticamente ad un valore finito dellospostamento in tempi brevissimi. Si riporta <strong>di</strong> seguito il risultatoconseguito me<strong>di</strong>ante la modellazione all’istante <strong>di</strong> tempo t = 0,1 sec.I no<strong>di</strong> rispetto ai quali si sono misurati lo spostamento lungo l’asse Z,sono rappresentati nelle seguenti immagini, nelle quali è possibileosservare anche la deformazione che la piastra subisce, per effetto delcarico a cui è sottoposta all’istante <strong>di</strong> tempo t = 0,1 sec.Per apprezzare anche la riduzione <strong>di</strong> spessore della piastra, simisureranno gli spostamenti residui sia per elementi superiori siainferiori.Figura 7. 10 - No<strong>di</strong> centrali della Mesh.171
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 11 - No<strong>di</strong> sul Bordo della Mesh.Si mostrano in seguito le deformazioni plastiche effettive all’estradosso eall’intradosso della piastra:172
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 12 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 3.Figura 7. 13 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 3.173
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEGraficamente si rappresenta <strong>di</strong> seguito l’andamento degli spostamentinodali al variare del tempo e in precedenza in<strong>di</strong>viduati sulla piastra.Grafico 7. 5 – Spostamenti misurati nel centro della piastra all’intradosso eall’estradosso.Grafico 7. 6 – Spostamenti misurati sul bordo della piastra all’intradossoall’estradosso.174
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEGrafico 7. 7 – Ampiezza della fessura misurata all’intradosso della piastra inposizione centrale.Per misurare l’ampiezza della fessura, si calcola la <strong>di</strong>stanza che sussistetra gli spostamenti <strong>di</strong> due elementi all’intradosso della piastra, a<strong>di</strong>acentitra loro. Tale <strong>di</strong>fferenza si misura lungo l’asse X, essendo questa la<strong>di</strong>rezione lungo la quale si ha l’apertura della lesione.A tale scopo sono stati in<strong>di</strong>viduati gli elementi 1176 e 1177all’intradosso della piastra e in posizione centrale.In maniera sintetica si riportano <strong>di</strong> seguito i risultati numerici conseguiti:Cond. Vincolo b 1 b 2 b 3 Damping t [sec]Incastrata 0.1 0.1 0.1 5% 0,1Tabella 7. 2 - Parametri che caratterizzano il modello in LS-Dyna Version 970.W c [mm] 0,82Tabella 7. 3 – Ampiezza numerica della Fessura misurata nel centro della piastraall'intradosso.175
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHENo<strong>di</strong>centraliZ r,c [cm]Estradosso 2,15Intradosso 1,52No<strong>di</strong> <strong>di</strong>bordoZ r,b [cm]Estradosso 0,86Intradosso 0,75Tabella 7. 4 - Spostamenti residui, centrali e <strong>di</strong> bordo, misurati all’estradosso eall’intradosso della piastra.Dove i no<strong>di</strong> 13206 e 1201, sono quelli centrali, mentre i no<strong>di</strong> 12030 e2377, sono quelli <strong>di</strong> bordo, rispettivamente superiori ed inferiori.Calcolando la <strong>di</strong>fferenza tra i due si può verificare <strong>di</strong> quanto la piastra siriduce <strong>di</strong> spessore.• Modello SPH, sud<strong>di</strong>visione della piastra in 11520 Element_SPH,Prova 3:Il metodo SPH, a <strong>di</strong>fferenza del FEM, presenta una maggiore instabilità.D’altra parte questo suo limite è già stato messo in evidenza nel Capitolo5. Ne consegue che il tempo necessario d’analisi affinché si possonoosservare dei risultati numerici asintotici ad un valore costante, deveessere maggiore <strong>di</strong> quello imposto nel caso precedente. A tal fine si èscelto <strong>di</strong> fare terminare l’analisi ad un istante <strong>di</strong> tempo t = 1,2 sec.Si riportano <strong>di</strong> seguito i risultati conseguiti me<strong>di</strong>ante la modellazioneall’istante <strong>di</strong> tempo t = 1,2 sec.I no<strong>di</strong> rispetto ai quali si è misurato lo spostamento lungo l’asse Z, sonorappresentati nelle seguenti immagini, nelle quali è possibile osservareanche la deformazione che la piastra subisce, per effetto del carico cui èsottoposta all’istante <strong>di</strong> tempo t = 1,2 sec.176
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEA <strong>di</strong>fferenza del modello realizzato in FEM, non si ha la possibilità <strong>di</strong>in<strong>di</strong>viduare sia centralmente sia sul bordo un unico nodo, che sia questosull’estradosso o l’intradosso della piastra. In questo caso abbiamoquin<strong>di</strong> scelto come elementi nodali <strong>di</strong> riferimento, quelli riportati nellaseguente tabella:ParticelleCentrali Bordo10344 10345 9240 92415736 5737 4632 46331128 1129 24 2510392 103935784 57851176 1177Tabella 7. 5 - Elementi nodali centrali e <strong>di</strong> bordo sulla piastra <strong>di</strong>scretizzata in SPH.Di seguito si riportano le immagini della piastra all’istante <strong>di</strong> tempot = 1,2 sec, sulla quale sono evidenziate alcune delle particelle <strong>di</strong> centroe <strong>di</strong> bordo, oltre alla deformazione della piastra stessa.Figura 7. 14 – Elementi Nodali Centrali e <strong>di</strong> Bordo.177
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 15 – Elementi Nodali <strong>di</strong> Bordo.Si mostrano in seguito le deformazioni plastiche effettive all’estradosso eall’intradosso della piastra:Figura 7. 16 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 3.178
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 17 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 3.Per quanto concerne gli spostamenti misurati al centro e sul bordo dellapiastra, e la conseguente misura dell’ampiezza massima della fessura, sirimanda ai successivi grafici:Grafico 7. 8 – Spostamenti misurati nel centro della piastra all’intradosso eall’estradosso.179
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEGrafico 7. 9 – Spostamenti misurati sul bordo non vincolato della piastra,all’intradosso e all’estradosso.Grafico 7. 10 – Ampiezza della fessura misurata nel centro della piastraall’intradosso.In maniera sintetica si riportano <strong>di</strong> seguito i risultati numerici conseguiti:Cond. Vincolo b 1 b 2 b 3 Damping t [sec]Incastrata 0,1 0,1 0,1 5% 1,2Tabella 7. 6 - Parametri che caratterizzano il modello in LS-Dyna Version 970.180
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEW c [mm] 13Tabella 7. 7 – Ampiezza numerica della Fessura misurata nel centro della piastra.ParticellecentraliZ r,c [cm]Estradosso 15,0Intradosso 11,8No<strong>di</strong> <strong>di</strong>bordoZ r,b [cm]Estradosso 10,61Intradosso 10,42Tabella 7. 8 - Spostamenti residui, centrali e <strong>di</strong> bordo, misurati all’estradosso eall’intradosso della piastra.Dove le particelle 10344 e 1128, sono quelle centrali, mentre 9240 e 24,sono quelli <strong>di</strong> bordo, rispettivamente superiori ed inferiori. Calcolando la<strong>di</strong>fferenza tra i due si può verificare la riduzione <strong>di</strong> spessore che lapiastra subisce per effetto dei carichi cui è sottoposta.7.3 – Prova Sperimentale IVPer la quarta prova sperimentale si sono realizzate delle con<strong>di</strong>zioni <strong>di</strong>carico tali da produrre la rottura dell’elemento strutturale. In questo casonon si hanno quin<strong>di</strong> termini <strong>di</strong> confronto, tra l’evidenza sperimentale e lamodellazione numerica, se non la rottura effettiva dell’elemento.Tuttavia, quest’ultima prova consente <strong>di</strong> apprezzare i vantagginell’utilizzare un metodo <strong>di</strong> <strong>di</strong>scretizzazione particellare, quale l’SPHimpiegato nella modellazione, a fronte degli insuccessi mostrati dallamodellazione effettuata in FEM. In questo caso infatti, emerge uno deiprincipali limiti del Finite Element Method, dato che le con<strong>di</strong>zioni <strong>di</strong>carico sono tali da indurre una deformazione eccessiva della Mesh,realizzata per la <strong>di</strong>scretizzazione dell’elemento continuo, che non181
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEconsente al metodo numerico <strong>di</strong> convergere. Per tale motivo non si ha lapossibilità <strong>di</strong> mostrare alcun risultato apprezzabile della modellazioneeffettuata, in quanto il co<strong>di</strong>ce <strong>di</strong> calcolo impiegato, data l’incapacità <strong>di</strong>gestire una <strong>di</strong>storsione eccessiva della maglia, non fornisce nessunrisultato d’output del calcolo realizzato, in quanto la computazionenumerica termina all’istante.Lo Smoothed Particle Hydrodynamics, consente <strong>di</strong> superare questolimite, come già annunciato nel capitolo de<strong>di</strong>cato alla descrizione deidue meto<strong>di</strong> <strong>di</strong> <strong>di</strong>scretizzazione. Uno dei principali vantaggi <strong>di</strong> talemetodo risiede proprio nella capacità <strong>di</strong> trattare facilmente gran<strong>di</strong>deformazioni, essendo le connessioni tra i no<strong>di</strong> generate come una partedella computazione stessa, che può subire variazioni nel tempo.Di conseguenza si riporteranno in questo caso i soli risultati relativi allamodellazione effettuata in SPH.Nelle immagini successive si evidenzia l’andamento della deformazioneplastica effettiva, per due <strong>di</strong>versi istanti <strong>di</strong> tempo, per la piastra vistadall’alto e lateralmente.L’istante <strong>di</strong> tempo a cui si riferiscono le immagini successive è t = 0,02sec. prima ancora che si consegua la con<strong>di</strong>zione <strong>di</strong> rottura.182
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 18 – Effective Plastic Strain all’estradosso, all’istante t=0,02 sec.Figura 7. 19 – Effective Plastic Strain nel piano (y, z), all’istante t = 0,02 sec.Le immagini successive invece si riferiscono all’istante successivot = 0,04 sec. quando la piastra inizia a presentare segni <strong>di</strong> rottura.183
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 20 – Effective Plastic Strain all’estradosso all’istante t = 0,04 sec.Figura 7. 21 – Effective Plastic Strain nel piano (y, z), all’istante t = 0,04 sec.Si vuole mostrare in seguito, il risultato della modellazione che siconsegue all’istante <strong>di</strong> tempo t = 0,6 sec. in quest’immagine si possonoosservare le particelle che sono rimaste vincolate, e che quin<strong>di</strong> nonhanno subito spostamenti, e delle frange <strong>di</strong> calcestruzzo che restano aloro ancorate.184
CAPITOLO 7 – RISULTATI DELLE SIMULAZIONI NUMERICHEFigura 7. 22 – Rottura della piastra all’istante t = 0,6 sec.185
CONCLUSIONICONCLUSIONIAlla luce dei risultati conseguiti me<strong>di</strong>ante la modellazione numericadelle quattro prove sperimentali, si possono trarre le successiveconclusioni.Per quanto concerne lo stu<strong>di</strong>o parametrico condotto tra i due meto<strong>di</strong>d’analisi adottati, FEM e SPH, per la modellazione d’elementi strutturalisottoposti a carichi da esplosione, si può affermare che fin quando lecon<strong>di</strong>zioni <strong>di</strong> carico inducono velocità <strong>di</strong> deformazioni sufficientementebasse, in particolar modo inferiori a 300 sec -1 , a fronte <strong>di</strong> quelle che sipossono ottenere per carichi da esplosione, come si evince dai risultatinumerici in precedenza esposti, entrambi i meto<strong>di</strong> ben si prestano ai finidella modellazione. Tale dato emerge in particolar modo dai risultati chesi ottengono per la modellazione delle prime due prove sperimentali,nelle quali si possono osservare risultati simili tra i due meto<strong>di</strong>, nonessendoci, infatti, spostamenti apprezzabili della piastra in entrambi icasi.All’aumentare delle con<strong>di</strong>zioni <strong>di</strong> carico, e facendo un esplicitoriferimento alla terza prova simulata numericamente, si può apprezzare ilvantaggio nell’utilizzare il Finite Element Method, piuttosto che il piùinnovativo Smoothed Particle Hydrodynamics. In virtù dei confrontioperati tra i risultati numerici e quelli messi in evidenza dalla provasperimentale, si osserva, infatti, che per la stessa con<strong>di</strong>zione <strong>di</strong> carico, <strong>di</strong>vincolo, a parità <strong>di</strong> Strain-Rate, <strong>di</strong> legami costitutivi, e facendo variare ilsolo metodo d’analisi, il FEM restituisce risultati numerici più prossimi aquelli sperimentali.186
CONCLUSIONIIn questo caso si osserva la variabilità <strong>di</strong> risultati che si possono ottenereal variare dell’infittimento della Mesh realizzata, e dei valori numericiassociati ai tre parametri b 1 , b 2 e b 3 , già descritti nel Capitolo 6.Per ognuno dei due meto<strong>di</strong>, FEM e SPH, fissata la <strong>di</strong>mensione dellaMesh realizzata, e facendo variare i soli valori numerici associati ai treparametri sopra in<strong>di</strong>cati, si ottengono risultati in termini <strong>di</strong> spostamentiresidui <strong>di</strong>fferenti. Lo stesso risultato si può osservare mantenendoinalterati i valori numerici dei tre parametri sopra in<strong>di</strong>cati, e facendovariare l’infittimento della Mesh in cui è stata sud<strong>di</strong>visa la piastra.Per i meto<strong>di</strong> FEM e SPH, dagli spostamenti residui misuratiall’intradosso della piastra, rispettivamente sui no<strong>di</strong> centrali e <strong>di</strong> bordo1201 e 2377, e sulle particelle centrali e <strong>di</strong> bordo 1128 e 24, si riportano iseguenti risultati:F E MMesh b 1 b 2 b 3 t [sec] Z r,c [cm] Z r,b [cm] W c [mm]6912 Element Solid0,1 0,1 0,1 0,1 1,2 0,6 0,451 1 1 0,1 1,06 0,47 0,00411520 Element Solid0,1 0,1 0,1 0,1 1,47 0,74 0,821 1 1 0,1 0,99 0,45 0,36Tabella 8. 1 – Variabilità dei risultati per il metodo FEM, al variare delle <strong>di</strong>mensionidella Mesh e dei parametri b 1 , b 2 e b 3 .S P HMesh b 1 b 2 b 3 t [sec] Z r,c [cm] Z r,b [cm] W c [mm]6912 Element SPH0,1 0,1 0,1 1,81 5,8 2,8 1,161 1 1 2,7 10 4 4,211520 Element SPH0,1 0,1 0,1 1,2 11,8 10,42 131 1 1 1,94 9 3,4 9,9Tabella 8. 2 - Variabilità dei risultati per il metodo FEM, al variare delle <strong>di</strong>mensionidella Mesh e dei parametri b 1 , b 2 e b 3 .187
CONCLUSIONIPer il metodo SPH, data la sua maggiore instabilità numerica e lanecessità quin<strong>di</strong> <strong>di</strong> tempi d’analisi maggiore affinché si possanoosservare dei risultati finiti, avremo dei tempi d’analisi <strong>di</strong>versi rispetto aquelli adottati per il metodo FEM. Inoltre, nelle precedenti tabelle sievidenziano in grassetto i risultati ottenuti dalla modellazione.Da queste tabelle si evince che il metodo FEM rispetto all’SPH, è menosensibile alla variazione sia dell’infittimento della Mesh, sia al variaredei parametri numerici b 1 , b 2 e b 3 .Da quanto emerso si può quin<strong>di</strong> affermare che il metodo SPH, per questocaso specifico, necessità <strong>di</strong> una calibrazione su base sperimentale <strong>di</strong> taliparametri, i quali a loro volta come già evidenziato nel Capitolo 6,assumono valori <strong>di</strong>versi al variare della <strong>di</strong>mensione della stessa Mesh.Ai fini della modellazione, e per questo caso particolare, è quin<strong>di</strong>preferibile impiegare il metodo FEM, data la sua minor sensibilità neiconfronti <strong>di</strong> tali fenomeni.Dai risultati <strong>di</strong> questa stessa prova, si può altresì mettere in lucel’attinenza del legame costitutivo Concrete Damage, proposto daMalvar, ai fini della modellazione del calcestruzzo. Tenendo presenteche migliori risultati numerici si potrebbero conseguire, definendo iparametri richiesti dall’autore, attraverso lo svolgimento <strong>di</strong> provesperimentali preposte alla caratterizzazione del calcestruzzo, cosìcom’esposto nel Capitolo 6.Dai risultati della quarta prova modellata, emerge invece l’impossibilità<strong>di</strong> impiegare il metodo d’analisi FEM, data l’eccessiva deformazioneindotta nella Mesh realizzata, e le conseguenti incapacità numeriche delmetodo <strong>di</strong> gestire tale <strong>di</strong>storsione.In questo caso è quin<strong>di</strong> preferibile impiegare il metodo SPH, in quanto lesingole particelle non essendo legate tra loro da costrizioni <strong>di</strong> maglia,188
CONCLUSIONInon avranno problemi ad allontanarsi le une dalle altre simulando larottura dell’elemento, sotto l’azione dei carichi a cui sono sottoposte.Un successivo risultato che questa prova mostra, è l’incremento <strong>di</strong>resistenza del calcestruzzo per gli effetti <strong>di</strong> Strain-Rate. Si può, infatti,osservare come il valore <strong>di</strong> tensione <strong>di</strong> trazione alla quale si ha la rotturadell’elemento, sia maggiore <strong>di</strong> quell’assegnata in con<strong>di</strong>zione <strong>di</strong> caricoquasi statica.Sulla base dei risultati conseguiti, e delle conclusioni che da loro sitraggono, si potrà in seguito in<strong>di</strong>rizzare la ricerca sui seguenti aspetti:• Le stesse prove sperimentali andrebbero modellate utilizzandoaltri meto<strong>di</strong> d’analisi, quali ad esempio quelli Euleriani,l’Arbitrarian Lagrangian Eulerian (ALE), o altri meto<strong>di</strong> <strong>di</strong> tipoMeshfree.• Si potrebbero realizzare simulazioni numeriche <strong>di</strong> provesperimentali condotte su piastre interamente d’acciaio, o suelementi strutturali iperstatici, con il fine <strong>di</strong> valutare gli effetti <strong>di</strong>Strain-Rate, che potrebbero in questi casi essere più evidenti.• Altri stu<strong>di</strong> potranno essere condotti sulla base dei risultatinumerici conseguiti dalla simulazione della quarta prova,provando a modellare in questo caso interventi <strong>di</strong> rinforzo conmateriali compostiti, messi tra loro a confronto, in modo tale daevitare che si possa conseguire la con<strong>di</strong>zione <strong>di</strong> rotturadell’elemento, come già mostrato dalla modellazione edall’evidenza della prova sperimentale stessa.189
CONCLUSIONI• Si potranno calibrare me<strong>di</strong>ante lo svolgimento <strong>di</strong> provesperimentali specifiche, i parameri numerici richiesti dal modelloConcrete Damage, per la caratterizzazione del calcestruzzo, a<strong>di</strong>fferenza <strong>di</strong> quanto fatto nell’elaborato <strong>di</strong> tesi, in cui si èpervenuti numericamente alla definizione <strong>di</strong> tali parametri.190
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLEIn<strong>di</strong>ce delle FigureFigura 1. 1 – Andamento qualitativo <strong>di</strong> una Curva <strong>di</strong> Pressione prodotta daun’esplosione. ............................................................................................................ 21Figura 2. 1 – Caratteristiche Geometriche della piastra, e dell’armatura metallica. 38Figura 2. 2 – Setup <strong>di</strong> Prova. .................................................................................... 38Figura 2. 3 – Immagine della piastra in seguito alla terza Prova.............................. 41Figura 2. 4 – Immagini della piastra in seguito alla quarta Prova. ........................... 42Figura 3. 1 – Curva <strong>di</strong> Pressione semplificata, usata dagli autori per la modellazionedella prova. 44Figura 3. 2 – Discretizzazione della superficie <strong>di</strong> carico.......................................... 46Figura 3. 3 – Distanza effettiva dell’i-esimo elemento dal centro d’esplosione. ..... 49Figura 4. 1 – Instabilità d trazione delle particelle. 92Figura 4. 2 - Stress Point Method in uno spazio bi-<strong>di</strong>mensionale............................ 94Figura 5. 1 - Modellazione <strong>di</strong> una Turbina con LS-Dyna. 98Figura 5. 2 - Sezione della Piastra sottoposta a Carico <strong>di</strong>stribuito. ........................ 109Figura 6. 1 – Superficie <strong>di</strong> rottura massima e residua. 118Figura 6. 2 – Card Material Model_016. ................................................................ 120Figura 6. 3 – Andamento della superficie <strong>di</strong> rottura corrente Δσ, in funzione dellatensione sferica p. .................................................................................................... 121Figura 6. 4 – Superfici <strong>di</strong> Rottura. .......................................................................... 123Figura 6. 5 – Legame costitutivo Tensione-Deformazione Volumetrica. .............. 156Figura 7. 1 – Effective Plastic Strain misurato all’estradosso della piastra, Prova 1.163Figura 7. 2 – Effective Plastic Strain misurato all’intradosso della piastra, Prova 1.................................................................................................................................. 163Figura 7. 3 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 2.................................................................................................................................. 164Figura 7. 4 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 2.................................................................................................................................. 165Figura 7. 5 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 1.................................................................................................................................. 166Figura 7. 6 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 1.................................................................................................................................. 167Figura 7. 7 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 2.................................................................................................................................. 168Figura 7. 8 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 2.................................................................................................................................. 168Figura 7. 9 – Immagine della piastra in seguito alla terza prova............................ 170Figura 7. 10 - No<strong>di</strong> centrali della Mesh.................................................................. 171Figura 7. 11 - No<strong>di</strong> sul Bordo della Mesh. ............................................................. 172Figura 7. 12 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 3.................................................................................................................................. 173191
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLEFigura 7. 13 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 3.................................................................................................................................. 173Figura 7. 14 – Elementi Nodali Centrali e <strong>di</strong> Bordo............................................... 177Figura 7. 15 – Elementi Nodali <strong>di</strong> Bordo. .............................................................. 178Figura 7. 16 - Effective Plastic Strain misurato all’estradosso della piastra, Prova 3.................................................................................................................................. 178Figura 7. 17 - Effective Plastic Strain misurato all’intradosso della piastra, Prova 3.................................................................................................................................. 179Figura 7. 18 – Effective Plastic Strain all’estradosso, all’istante t=0,02 sec.......... 183Figura 7. 19 – Effective Plastic Strain nel piano (y, z), all’istante t = 0,02 sec...... 183Figura 7. 20 – Effective Plastic Strain all’estradosso all’istante t = 0,04 sec......... 184Figura 7. 21 – Effective Plastic Strain nel piano (y, z), all’istante t = 0,04 sec...... 184Figura 7. 22 – Rottura della piastra all’istante t = 0,6 sec. ..................................... 185In<strong>di</strong>ce dei GraficiGrafico 3. 1 - Estrapolazione numerica del coefficiente sperimentale α.................. 51Grafico 5. 1 – Andamento della Curva <strong>di</strong> Pressione, calcolata per l’area <strong>di</strong> caricoA-1 e relativa alla prima prova modellata. 107Grafico 6. 1 – Funzione <strong>di</strong> Danno, calcolata per b 1 = b 2 = b 3 = 0,1. 136Grafico 6. 2 – Funzione Bilineare in scala logaritmica del DIF per il calcestruzzo.................................................................................................................................. 146Grafico 6. 3 – Input in LS-Dyna della Curva <strong>di</strong> Strain-Rate a Compressione eTrazione per il calcestruzzo. .................................................................................... 147Grafico 6. 4 – Curva <strong>di</strong> Strain-Rate a trazione adoperato per l’acciaio.................. 149Grafico 6. 5 – Legame costitutivo Pressione-Deformazione Volumetrica. ............ 152Grafico 6. 6 – Legame Tensio-Deformativo Volumetrico...................................... 158Grafico 6. 7 – Equazione <strong>di</strong> Stato assegnata come input in LS-Dyna, per lamodellazione della piastra in c.a.............................................................................. 159Grafico 7. 1 - Spostamento Residuo, misurato nel centro della piastra all’estradosso.164Grafico 7. 2 - Spostamento Residuo, misurato nel centro della piastra all’estradosso.................................................................................................................................. 165Grafico 7. 3 - Spostamento Residuo, misurato nel centro della piastra all’intradosso.................................................................................................................................. 167Grafico 7. 4 - Spostamento Residuo, misurato nel centro della piastra all’intradosso.................................................................................................................................. 169Grafico 7. 5 – Spostamenti misurati nel centro della piastra all’intradosso eall’estradosso. .......................................................................................................... 174Grafico 7. 6 – Spostamenti misurati sul bordo della piastra all’intradossoall’estradosso. .......................................................................................................... 174Grafico 7. 7 – Ampiezza della fessura misurata all’intradosso della piastra inposizione centrale. ................................................................................................... 175Grafico 7. 8 – Spostamenti misurati nel centro della piastra all’intradosso eall’estradosso. .......................................................................................................... 179Grafico 7. 9 – Spostamenti misurati sul bordo non vincolato della piastra,all’intradosso e all’estradosso.................................................................................. 180192
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLEGrafico 7. 10 – Ampiezza della fessura misurata nel centro della piastraall’intradosso............................................................................................................ 180In<strong>di</strong>ce delle TabelleTabella 1. 1 – Parametri che caratterizzano fisicamente alcuni materiali esplosivi . 35Tabella 2. 1 – Proprietà elastiche dei materiali impiegati per la costruzione dellapiastra, allo Strain-Rate <strong>di</strong> 100 sec -1 . 39Tabella 2. 2 – Proprietà <strong>di</strong>namiche del calcestruzzo allo Strain-Rate <strong>di</strong> 100 sec -1 ... 39Tabella 2. 3 – Tensione <strong>di</strong> Snervamento dell’acciaio, per due <strong>di</strong>versi valori <strong>di</strong> Strain-Rate. ........................................................................................................................... 39Tabella 2. 4 – Proprietà del calcestruzzo, per velocità <strong>di</strong> deformazione quasi statica.................................................................................................................................... 40Tabella 2. 5 – Con<strong>di</strong>zioni <strong>di</strong> carico ed Evidenze Sperimentali ad esse associate..... 41Tabella 3. 1 – Calore specifico degli esplosivi e Coefficiente d’Equivalenza. 48Tabella 3. 2 - Distanza Effettiva Ri, Carico Equivalente W TNT , Distanza Ridotta Zi.................................................................................................................................... 52Tabella 3. 3 - Picco <strong>di</strong> Pressione Δp(Z), calcolato secondo le varie formulazioni, eper le singole prove sperimentali............................................................................... 53Tabella 3. 4 - Picco <strong>di</strong> Pressione me<strong>di</strong>o, Coefficiente α........................................... 53Tabella 3. 5 - Durata della fase positiva t + , e costante numerica B. ......................... 53Tabella 3. 6 - Curve <strong>di</strong> Pressione P(Z, t), calcolate per le quattro prove sperimentali.................................................................................................................................... 54Tabella 5. 1 – Unità <strong>di</strong> Misure adottate dal LS-Dyna Version 970. 101Tabella 5. 2 – Element Solid................................................................................... 102Tabella 5. 3 – Part. .................................................................................................. 103Tabella 5. 4 – Section Solid. ................................................................................... 103Tabella 5. 5 – Set_Node_List Vincoli..................................................................... 105Tabella 5. 6 – Boundary Con<strong>di</strong>ction....................................................................... 105Tabella 5. 7 – Curva <strong>di</strong> Pressione Tabulata. ........................................................... 107Tabella 5. 8 - Set_Segment. .................................................................................... 108Tabella 5. 9 – Load Set_Segment. .......................................................................... 109Tabella 5. 10 – Set_Part_List.................................................................................. 110Tabella 5. 11 – Carico da Peso Proprio................................................................... 110Tabella 5. 12 – Element SPH.................................................................................. 112Tabella 5. 13 – Section SPH. .................................................................................. 112Tabella 5. 14 – Set_Node_List Carico.................................................................... 114Tabella 5. 15 – Load_Node_Set.............................................................................. 115Tabella 5. 16 – Damping......................................................................................... 116Tabella 6. 1 – parametri che definiscono la Card del Material Model. 120Tabella 6. 2 – Parametri numerici che definiscono le superfici <strong>di</strong> rottura d’input perLS-Dyna................................................................................................................... 131Tabella 6. 3 – Input per LS-Dyna del material Concrete Damage, definiti per lamodellazione della piastra. ...................................................................................... 136Tabella 6. 4 – Velocità <strong>di</strong> deformazione quasi statica. ........................................... 144193
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLETabella 6. 5 – Caratteristiche statiche del calcestruzzo e parametri numerici utilizzatiper il calcolo delle curve <strong>di</strong> Strain-Rate................................................................... 144Tabella 6. 6 – Curve <strong>di</strong> Strain-Rate per il calcestruzzo a Trazione e Compressioneadottate nella modellazione. .................................................................................... 145Tabella 6. 7 – DIF a trazione adoperato per L’acciaio. .......................................... 149Tabella 6. 8 – Bulk Modulus................................................................................... 153Tabella 6. 9 – Coefficienti numerici <strong>di</strong> Green and Swanson. ................................. 156Tabella 6. 10 – Risultati Numerici del legame costitutivo calcolato. ..................... 157Tabella 6. 11 – Valori Tabulati dell’equazione <strong>di</strong> stato.......................................... 158Tabella 6. 12 – Input per LS-Dyna dell’equazione <strong>di</strong> stato Tabulated Compaction.................................................................................................................................. 159Tabella 7. 1 - Risultati numerici della terza Prova Sperimentale realizzata. 170Tabella 7. 2 - Parametri che caratterizzano il modello in LS-Dyna Version 970... 175Tabella 7. 3 – Ampiezza numerica della Fessura misurata nel centro della piastraall'intradosso. ........................................................................................................... 175Tabella 7. 4 - Spostamenti residui, centrali e <strong>di</strong> bordo, misurati all’estradosso eall’intradosso della piastra. ...................................................................................... 176Tabella 7. 5 - Elementi nodali centrali e <strong>di</strong> bordo sulla piastra <strong>di</strong>scretizzata in SPH.................................................................................................................................. 177Tabella 7. 6 - Parametri che caratterizzano il modello in LS-Dyna Version 970... 180Tabella 7. 7 – Ampiezza numerica della Fessura misurata nel centro della piastra.................................................................................................................................. 181Tabella 7. 8 - Spostamenti residui, centrali e <strong>di</strong> bordo, misurati all’estradosso eall’intradosso della piastra. ...................................................................................... 181Tabella 8. 1 – Variabilità dei risultati per il metodo FEM, al variare delle <strong>di</strong>mensionidella Mesh e dei parametri b 1 , b 2 e b 3 . 187Tabella 8. 2 - Variabilità dei risultati per il metodo FEM, al variare delle <strong>di</strong>mensionidella Mesh e dei parametri b 1 , b 2 e b 3 . ..................................................................... 187194
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLEBibliografia1. Camillo Belgrano. Gli esplosivi. Ed. Hoepli, Milano, 1973.2. C. Giorgio. Tecnica degli esplosivi-Impiego degli esplosivi (2vol.). Ed. Bianco, U<strong>di</strong>ne, 1964.3. A.Bacci, L’Esplosivistica in Campo Civile, pubblicato sugli Attidel “I° seminario Nazionale sugli Or<strong>di</strong>gni Esplosivi”, svoltopresso il Comando Generale dell’Arma dei Carabinieri - III°Reparto Armamenti ed Equipaggiamenti Speciali.4. H. von Dach, Der Totale Widerstand, Ed.SUOV, Biel, 19725. Pedro F.Silva, Binggeg. Lu & Antonio Nanni. Pre<strong>di</strong>ction ofblast loads on the expected damage level by using <strong>di</strong>splacementbased method. Department of Civil, Architectural andEnvironmental Engineering, University of Missouri-Rolla, USA.6. Francesco Cesari. Introduzione al Metodo degli Elementi Finiti.Ed. Pitagora, Bologna, ISBN 88-371-0013-2, 1989.7. Shaofan Li, Wing Kam Liu, Meshfree Particle Methods.Springer, 2005.8. Shaofan Li, Wing Kam Liu, Meshfree and Particle Methods andtheir applications. American Society of Mechanical Engineers,Appl Mech Rev vol 55, no 1, January, 2002.9. M.B. Liu, G.R. Liu, K.T. Lam, A one-<strong>di</strong>mensional Meshfreeparticle formulation for simulating shock waves. Shock Waves,vol 13, pag 200-211, 2003.10. Lu Young, Xu Kai, Numerical Simulation of Concrete Break-upunder Blast Loa<strong>di</strong>ng. Civil Engineering Research, January, 2004.11. LS-DYNA, Theory Manual 2006 Version 970, Livemore SoftwareTechnology Corporation, LSTC Report.195
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLE12. LSTC (1999). LS-DYNA keyword user’s manual, non-lineardynamic analysis of structures, version 970. Livermore SoftwareTechnology Corporation, LSTC report.13. Malvar L J, Crawford J E, Wesevich J W, Simons D: APlasticity Concrete Material Model for Hydrocodes. InternationalJournal of Impact Engineering, Vol. 19, No. 9-10, pp 847-873.Elsevier Science Ltd. 1997.14. Leonard E Schwer, L. Javier Malvar, Simplified ConcreteModeling with Mat_Concrete_Damage_Rel3. JRI LS-Dyna UserWeek, August, 2005.15. Bažant Z P, Fracture Mechanics of Concrete Structures, State-ofthe-Artand Proc. 1 st Int. Conf. Breckenridge, CO, 1992, ElsevierApplied Science, Amsterdam.16. Honggun Park, Jae-Yo Kim. Plasticity model using multiplefailure criteria for concrete in compression. International Journalof Solids and Structures , Volume 42, Issue 8 , April 2005, Pages2303-2322.17. Ezio Cadoni, Kamil Labibes, Mario Berra, Marco Ginagrasso,Carlo Albertini. Influence of Aggregate size on Strain-RateTensile, Behavior of concrete. ACI Material Journal, no 98-M24,May-June, 2001.18. Malvar L J, Crawford E J, Dinamic Increase Factor forConcrete. Twenty-Eighth DDESB Seminar. Orlando, FL, August1998.19. Mattias Unosson, Numerical simulations of penetration andperforation of high performance concrete with 75mm steelprojectile. Defence Research Establishment Weapons and196
INDICI DELLE FIGURE, DEI GRAFICI E DELLE TABELLEProtection Division SE-147 25 TUMBA, SWEDEN. November2000. ISSN 1104-9154.20. Comité Euro-International du Béton, CEB-FIP Model Code1990, Redwood Books, Trowbridge, Wiltshire, UK, 1993.21. Bažant Z P, Prat C, Microplane Model for Brittle-PlasticMaterial: Theory and Verification. Journal of EngineeringMechanics, Vol. 114, No. 10, October, 1988. ASCE, ISSN 0733-9399/88/0010. Paper No. 22823.22. Comité Européen du Béton, CEB-FIP Model Code 90, ThomasTelford Service, London, 1993.197
RINGRAZIAMENTIRingraziamentiIl conseguimento <strong>di</strong> un obiettivo importante è <strong>di</strong>fficile da raggiungere,quale una Laurea in Ingegneria, è una gioia che va con<strong>di</strong>visa con lepersone più care. Appaiono scontati i ringraziamenti ai propri genitoriper gli sforzi profusi nel corso <strong>di</strong> questi anni, per consentirmi <strong>di</strong> tagliarequest’importante traguardo, più appropriati sono invece iringraziamenti nei loro confronti per la pazienza e la capacità <strong>di</strong>sopportare i tanti momenti <strong>di</strong> nevrosi, <strong>di</strong> stress ed esaurimento, chehanno pervaso il mio corso <strong>di</strong> stu<strong>di</strong>. A tal proposito mi sembra più cheopportuno ringraziare le mie care ed adorate sorelline, Rossana eYlenia, costrette a subire la medesima sorte. Come non poter ringraziarela mia fidanzata Fabiana, per tutte le volte che mi è stata vicinaascoltando le mie telefonate e leggendo i miei messaggi pregni <strong>di</strong> ansie epaure prima <strong>di</strong> ogni esame. Un amico sempre fedele, capace <strong>di</strong> farmiritrovare il sorriso nei momenti <strong>di</strong>fficili, e che per tanto mi sento <strong>di</strong>ringraziare è il mio Beagle, nonostante le tavole dei progetti, gliappunti, le matite e le penne da lui <strong>di</strong>strutte.Lunga sarebbe la lista <strong>di</strong> amici e parenti da ringraziare, compagni <strong>di</strong>stu<strong>di</strong> con i quali in questi anni ho con<strong>di</strong>viso le gioie per gli esamisuperati,e qualche immancabile amarezza.Ma in particolar modo ringrazio gli amici <strong>di</strong> sempre, i cari vecchicompagni del liceo, Mauro, Ferruccio, Gennaro, Luca, Marcello, Rocco,Mino, Fonzie e tutti gli altri che non me ne vogliano se non nominati,per tutte le serate passate insieme, le partite <strong>di</strong> pallone, le feste, le nottibrave, le zingarate, e quanto altro fatto insieme che è servito a<strong>di</strong>stogliermi dalle fatiche universitarie. Amici con i quali spero <strong>di</strong>198
RINGRAZIAMENTItornare a vivere momenti <strong>di</strong> spensieratezza, che tanto mi sono mancatiin questi ultimi mesi <strong>di</strong> sacrifici.Un ringraziamento <strong>di</strong> vero cuore lo devo alle mie care nonne, a loro chehanno sempre pregato nella speranza <strong>di</strong> potermi presto vedere laureato,sono consapevole <strong>di</strong> dare loro e alla mia famiglia un enorme gioia. Ilmio più grande rammarico è che i miei due meravigliosi nonni, entrambi<strong>di</strong> nome Giuseppe come me, non siano partecipi <strong>di</strong> questa stessa gioia. Aloro va la mia gratitu<strong>di</strong>ne, per tutte le volte che mi hanno protetto edaiutato, per tutte le preghiere che hanno sempre ascoltato.Infine, ma non per questo meno importante, non posso esimermi dalringraziare il mio amico non che correlatore Ing. Domenico Asprone,per la pazienza, il tempo e la <strong>di</strong>sponibilità che mi ha concesso. È stataper me una vera fortuna incontrarlo e conoscerlo nel momento piùimportante del mio percorso universitario. Insieme a lui ringrazio ilProf. Ing. Gaetano Manfre<strong>di</strong> e il Prof. Ing. Andrea Prota, perl’opportunità concessami <strong>di</strong> prendere parte a questo interessantissimostu<strong>di</strong>o <strong>di</strong> ricerca. Ringrazio l’intero <strong>Dipartimento</strong> <strong>di</strong> Ingegneria<strong>Strutturale</strong>, dottoran<strong>di</strong>, ricercatori e tecnici <strong>di</strong> laboratorio, per lasimpatia <strong>di</strong>mostratami.199