Appendice A Operatori Scalari e Vettoriali - INFN
Appendice A Operatori Scalari e Vettoriali - INFN
Appendice A Operatori Scalari e Vettoriali - INFN

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
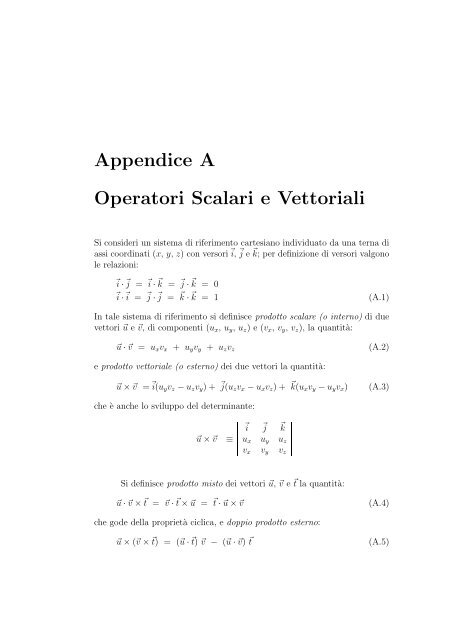
<strong>Appendice</strong> A<strong>Operatori</strong> <strong>Scalari</strong> e <strong>Vettoriali</strong>Si consideri un sistema di riferimento cartesiano individuato da una terna diassi coordinati (x, y, z) con versori⃗i, ⃗j e ⃗ k; per definizione di versori valgonole relazioni:⃗i ·⃗j = ⃗i · ⃗k = ⃗j · ⃗k = 0⃗i ·⃗i = ⃗j ·⃗j = ⃗ k · ⃗k = 1(A.1)In tale sistema di riferimento si definisce prodotto scalare (o interno) di duevettori ⃗u e ⃗v, di componenti (u x , u y , u z ) e (v x , v y , v z ), la quantità:⃗u · ⃗v = u x v x + u y v y + u z v z(A.2)e prodotto vettoriale (o esterno) dei due vettori la quantità:⃗u × ⃗v =⃗i(u y v z − u z v y ) + ⃗j(u z v x − u x v z ) + ⃗ k(u x v y − u y v x )(A.3)che è anche lo sviluppo del determinante:⃗i ⃗j ⃗ k⃗u × ⃗v ≡ u x u y u zv x v y v zSi definisce prodotto misto dei vettori ⃗u, ⃗v e ⃗t la quantità:⃗u · ⃗v ×⃗t = ⃗v ·⃗t × ⃗u = ⃗t · ⃗u × ⃗v(A.4)che gode della proprietà ciclica, e doppio prodotto esterno:⃗u × (⃗v ×⃗t) = (⃗u ·⃗t) ⃗v − (⃗u · ⃗v) ⃗t(A.5)
Inoltre:(⃗u × ⃗v) · (⃗t × ⃗z) = ⃗u · ⃗v × (⃗t × ⃗z)= ⃗u [ (⃗v · ⃗z) ⃗t − (⃗v ·⃗t) ⃗z ]= (⃗u ·⃗t)(⃗v · ⃗z) − (⃗u · ⃗z)(⃗v ·⃗t) (A.6)e(⃗u × ⃗v) × (⃗t × ⃗z) = (⃗u × ⃗v · ⃗z) ⃗t − (⃗u × ⃗v ·⃗t) ⃗z(A.7)Se indichiamo con f, un generico campo scalare, possiamo definirel’operatore vettoriale nabla ∇, come:∇ ≡ ⃗i ∂∂x + ⃗j ∂∂y + ⃗ k ∂ ∂zed in funzione di questo l’operatore vettoriale gradiente:∇ f ≡ ⃗i ∂f∂x + ⃗j ∂f∂y + ⃗ k ∂f∂z(A.8)(A.9)Consideriamo, ora, un campo scalare U(x, y, z); se partendo da un puntoP = (x, y, z) si esegue uno spostamento infinitesimo:d⃗s = ⃗i dx + ⃗j dy + ⃗ k dz = ⃗n ds(A.10)con (ds) 2 = (dx) 2 + (dy) 2 + (dz) 2 , la variazione corrispondente di U è:dU = U(x + dx, y + dy, z + dz) − U(x, y, z)= ∂U ∂U ∂Udx + dy +∂x ∂y ∂z dz= ∇U · d⃗s = ∇U · ⃗nds (A.11)In un punto P = (x, y, z) la derivata direzionale di U nella direzionespecificata dal versore ⃗n è definita come:dUds≡ ∇U · ⃗n(A.12)cioè è la componente del vettore ∇U nella direzione orientata fissata dallospostamento d⃗s. Da questa ultima relazione si ricava che:1. il gradiente di U è un vettore di modulo uguale al valore assolutomassimo della derivata direzionale;2. la direzione e il verso coincidono con quelli per i quali la derivatadirezionale è massima;
3. in ogni punto il vettore gradiente è perpendicolare alla superficie divalore U = cost passante per il punto considerato.Due grandezze frequentemente usate in relazione ad un generico campovettoriale ⃗v sono l’operatore scalare divergenza:∇ · ⃗v ≡ ∂v x∂x + ∂v y∂y + ∂v z∂z(A.13)(che si ottiene applicando formalmente la definizione dell’operatore ∇ scalarmenteal vettore ⃗v) e l’operatore vettoriale rotore tale che:∇ × ⃗v≡( ∂vz∂y − ∂v )y⃗i +∂z( ∂vy∂x − ∂v )x ⃗ k∂y( ∂vx∂z − ∂v z∂x)⃗j(A.14)che, di nuovo, si ottiene applicando formalmente l’operatore ∇ vettorialmenteal vettore ⃗v e che si può ottenere anche come lo sviluppo del determinante:∇ × ⃗v ≡ ∂∂x⃗i ⃗j ⃗ k∂∂y∂∂zv x v y v zPer la linearità dell’operatore ∇ si ha:∇ (f + g) = ∇ f + ∇ g∇ (f g) = f∇ g + g∇ f∇ · (⃗u + ⃗v) ≡ ∇ · ⃗u + ∇ · ⃗v∇ × (⃗u + ⃗v) = ∇ × ⃗u + ∇ × ⃗v∇ · (f ⃗u) = ⃗u · ∇f + f∇ · ⃗u∇ × (f ⃗u) = ∇f × ⃗u + f∇ × ⃗u(A.15)(A.16)(A.17)(A.18)(A.19)(A.20)Si definisce anche l’operatore di Laplace o laplaciano ∇ 2 come:∇ · ∇f ≡ ∇ 2 f(A.21)
<strong>Appendice</strong> BTeoremi notevoli del CalcoloDifferenzialeSia f(x, y, z) uno scalare qualsiasi; consideriamone una superficie di livello,cioè una superficie tale che su di essa sia f(x, y, z) = cost. Per definizione disuperficie di livello, su di essa df = 0, ovvero, se d⃗s è l’elemento infinitesimodi arco su tale superficiesi avrà:d⃗s = dx ⃗i + dy ⃗j + dz ⃗ k(B.1)0 ≡ df = d⃗s · ∇f (B.2)come già visto dalla definizione di gradiente (A.9) e di derivata direzionale(A.12).Si definisce la circuitazione di un vettore ⃗v come l’integrale di ⃗v · d⃗svalutato lungo una qualche linea s:∫I = ⃗v · d⃗s(B.3)sSe ⃗v è tale cheabbiamo⃗v = ∇fdf = ∇f · d⃗s(B.4)(B.5)Quindi, se P 1 e P 2 sono gli estremi della curva s, la circuitazione I definitain (B.3) diventa semplicementeI =∫ P2P 1df = f(P 2 ) − f(P 1 ) (B.6)
cioè dipende solo dagli estremi della curva e non dal cammino seguito parepassare da P 1 a P 2 . Pertanto, tutte le volte che⃗v = ∇fsi ha che la sua circuitazione lungo una linea chiusa è nulla:∮∇f · d⃗s = 0(B.7)(B.8)in tal caso si dice che il vettore è conservativo.Si definisce flusso di un vettore ⃗v attraverso una superficie S, l’integraledi superficie∫φ S (⃗v) = ⃗v · ⃗n dS(B.9)Sove ⃗n è il versore avente in ogni punto (si S) la direzione normale alla superficieS in quel punto e rivolto sempre dalla stessa parte di S. Se ora S èuna superficie chiusa e orientabile, con normale esterna ⃗n, che costituisce lafrontiera di un solido (nello spazio a tre dimensioni) di volume V , e ⃗v è uncampo vettoriale differenziabile con continuità definito in V , si ha il teoremadi Gauss o della divergenza (cfr. Apostol, volume 3, p.430 oppure dispensaProf. Zampieri, pag. 55)φ S (⃗v) =∫S⃗v · ⃗n dS =∫V(∇ · ⃗v) dV (B.10)che permette di sostituire un integrale di volume ad un integrale di superficie(o viceversa) e fornisce il significato fisico dell’operatore divergenza definitodalla (A.13). Dal teorema della divergenza seguono le relazioni:e∫∫SSf⃗n dS =∫⃗n × ⃗v dS =V∇f dV∫V∇ × ⃗v dV(B.11)(B.12)per la cui dimostrazione è sufficiente moltiplicare scalarmente i due membridelle equazioni con un vettore costante ⃗a e poi applicare le (A.19) e (A.26),rispettivamente, ricordando la definizione di prodotto misto nel caso della(B.12), ed il teorema della divergenza (B.10).Di grande utilità è anche il teorema o lemma di Green che, di nuovo,permette di trasformare un integrale di volume in uno di superficie o unintegrale di superficie in uno di linea. Considerando una superficie S ed un
volume V del tipo descritto nel teorema della divergenza, se f e g sono duecampi scalari differenziabili con continuità e definiti in V , allora:∫(g∇ 2 f − f∇ 2 g) dV = ∫ V ∇ · (g∇f − f∇g) dVV= ∫ S (g∇f − f∇g) · ⃗n dS (B.13)in cui ⃗n è la normale esterna a S; parimenti, considerando una superficieregolare nel piano, S, ed il suo contorno s, se f e g sono due campi scalaridifferenziabili con continuità e definiti in S, allora:∫(g∇ 2 f − f∇ 2 g) dS = ∫ S ∇ · (g∇f − f∇g) dSS= ∮ s (g∇f − f∇g) · ⃗n ds (B.14)in cui ⃗n è il versore normale a s. Si può facilmente osservare (cfr. ancheApostol, volume 3, pag. 437, esercizio 7) che questo lemma è conseguenzadel teorema della divergenza (B.10) e della relazione∇ · (f∇g) = ∇f · ∇g + f∇ 2 g(B.15)che segue dalla (A.19) nel caso in cui ⃗u = ∇g.Tornando alla definizione di circuitazione (B.3), un altro teorema importante,il teorema di Stokes o della circuitazione (cfr. Apostol, volume 3,pag. 408 oppure dispensa Prof. Zampieri pag. 47), asserisce che se S è unasuperficie parametrica semplice e regolare, ⃗v è un campo vettoriale differenziabiledefinito su S e s è la frontiera orientata (percorsa in senso antiorario)di S, allora:∮ ∫⃗v · d⃗s = (∇ × ⃗v) · ⃗n dS (B.16)sSche permette di sostituire un integrale di superficie ad un integrale di linea (oviceversa), fornendo al contempo l’interpretazione fisica dell’operatore rotoreintrodotto dalla (A.14), e che dice che la circuitazione di un vettore ⃗v lungouna linea chiusa s è uguale al flusso del vettore ∇×⃗v attraverso una qualsiasisuperficie S avente per contorno la linea s. In particolare ciò mostra che ilflusso del vettore ∇ × ⃗v dipende solo dal contorno e non dalla particolareforma della superficie S.Si noti ancora, alla luce delle (B.8) e (B.16), come un vettore conservativo(B.7) sia anche irrotazionale (A.29)∇ × ∇f = 0Inoltre le due espressioni(B.17)⃗v = ∇f o ∇ × ⃗v = 0 (B.18)
hanno lo stesso significato e una segue dall’altra.Dal teorema della circuitazione seguono le relazioni:∮ ∫fd⃗s = ⃗n · ∇f dSe∮ssd⃗s × ⃗v =S∫SdS(⃗n × ∇) × ⃗v(B.19)(B.20)per la cui dimostrazione è sufficiente moltiplicare scalarmente i due membridelle equazioni con un vettore costante ⃗a, ricordando la definizione di prodottomisto, e poi applicare la (A.20), nel caso della (B.18), ed il teoremadella circuitazione (B.16).
<strong>Appendice</strong> CEspressione di operatoridifferenziali in diversecoordinateRicordiamo le espressioni degli operatori differenziali in un sistema di coordinatecartesiane (x, y, z).∇f = ⃗i ∂∂x + ⃗j ∂∂y + ⃗ k ∂ ∂z∇ · ⃗u = ∂u x∂x + ∂u y∂y + ∂u z∂z∇×⃗u = ⃗i( ∂uz∂y − ∂u ) (y ∂ux+⃗j∂z ∂z(C.1)(C.2)− ∂u ) (z+∂x⃗ ∂uyk∂x − ∂u )x(C.3)∂y∇ 2 f = ∇ · ∇f = ∂2 f∂x 2+ ∂2 f∂y 2+ ∂2 f∂z 2(C.4)∇ 2 ⃗u = ∇ 2 u x⃗i + ∇ 2 u y⃗j + ∇ 2 u z⃗ k(C.5)Capita assai comunemente che la simmetria di un particolare problemasuggerisca l’uso di un sistema di coordinate curvilinee diverso da quello cartesiano.Per questo motivo riportiamo di seguito le espressioni degli operatoridifferenziali suindicati in coordinate polari sferiche e cilindriche.In coordinate polari sferiche (r, θ, ϕ), con versori ⃗i r , ⃗i θ e ⃗i ϕ :∂f∇f = ⃗i r∂r + 1 ∂f⃗i θr ∂θ + 1 ∂f⃗i ϕr sin θ ∂ϕ(C.6)
x = r sin θ cosϕ r = (x 2 + y 2 + z 2 ) 1/2zy = r sin θ sin ϕ → θ = arccos√z = r cosθϕ = arctg y/x(x 2 + y 2 + z 2 )∇ · ⃗u = 1 r 2 ∂∂r (r2 u r ) +1 ∂r sin θ ∂θ (sin θu θ) +1 ∂u ϕr sin θ ∂ϕ(C.7)[1 ∂∇ × ⃗u = ⃗i rr sin θ ∂θ (sin θ u ϕ) − ∂u ]θ∂ϕ[1 1 ∂u r⃗i θr sin θ ∂ϕ − ∂ ]∂r (r u ϕ) +[1 ∂⃗i ϕr ∂r (r u θ) − ∂u ]r∂θ+(C.8)∇ 2 f = 1r 2 ∂∂r= 1 r( )r2 ∂f∂r +1r 2 sin θ∂ 2∂r 2 (rf) +1r 2 sinθ∂∂θ∂∂θ( )sin θ∂f +1(sin θ∂f∂θ∂θ∂ 2 f∂ϕ 2r 2 sin 2 θ)+1 ∂ 2 fr 2 sin 2 θ ∂ϕ 2(C.9)∇ 2 ⃗u = ⃗i r[∇ 2 u r − 2r 2 u r −⃗i θ[∇ 2 u θ −⃗i ϕ[∇ 2 u ϕ −2r 2 sin 2 θ( ∂ (sin θ u )]∂θ θ) + ∂uϕ∂ϕ +]+u θr 2 sin 2 θ+ 2r 2 ∂u r∂θ− 2cos θr 2 sin 2 θuϕ 2 ∂u+ rr 2 sin 2 θ r 2 sinθ ∂ϕ∂u ϕ∂ϕ+ 2cos θr 2 sin 2 θ]∂u θ∂ϕ(C.10)In coordinate cilindriche (r, ϕ, z), con versori ⃗i r , ⃗i ϕ e ⃗i z :x = r cosϕ r = (x 2 + y 2 ) 1/2y = r sin ϕ → ϕ = arctg y/xz = z z = z∂f∇f = ⃗i r∂r + 1 ∂f⃗i ϕr ∂ϕ + ∂f⃗i z∂z∇ · ⃗u = 1 r∂∂r (r u r) + 1 ∂u ϕr ∂ϕ + ∂u z∂z(C.11)(C.12)
( 1 ∂u z∇ × ⃗u = ⃗i rr ∂ϕ − ∂u )ϕ+∂z( ∂ur⃗i ϕ − ∂u )z+∂z ∂r(1 ∂⃗i zr ∂r (r u ϕ) − ∂u )r∂ϕ∇ 2 f = 1 r(∂r ∂f )∂r ∂r+ 1 r 2 ∂ 2 f∂ϕ 2 + ∂2 f∂z 2(C.13)(C.14)(∇ 2 ⃗u = ⃗i r ∇ 2 u r − u r− 2 )∂u ϕr 2 r 2 ∂ϕ⃗i ϕ(∇ 2 u ϕ − u ϕ+ 2 )∂u rr 2 r 2 ∂ϕ⃗i z ∇ 2 u z++(C.15)
<strong>Appendice</strong> DCenni sulle Trasformate diFourierD.1 Serie trigonometriche di FourierQualunque funzione periodica con periodo T = 2π che soddisfi alle condizionif(2π) = f(0), f ′ (2π) = f ′ (0) può essere sviluppata in serie trigonometricadel tipoconf(x) = 1 ∞∑2 a 0 + (a n cos(nx) + b n sin(nx)) (D.1)a 0 = 1 π∫ π−πn=1f(x) dx(D.2)ea n = 1 πb n = 1 π∫ π−π∫ π−πf(x) cos(nx) dx n = 0, 1, 2, .... (D.3)f(x) sin(nx) dx n = 1, 2, .... (D.4)La (D.1) è un esempio particolare di serie di Fourier, come derivantedal teorema di Fourier: una funzione f(x), di periodo 2π ma forma arbitrariasopra una lunghezza uguale al periodo, può ottenersi come somma di funzionisinusoidali con periodi pari a sottomultipli di T (cioè T, T/2, T/3, ... ).1(Si noti che le funzioni √π cos(mx) e √ 1πsin(nx) con m = 0, 1, 2, ..e n = 0, 1, 2, .., ortonormali sull’intervallo (−π, π), costituiscono una baseortonormale sullo stesso intervallo).
Si può dimostrare che se f(x) è sommabile nell’intervallo x(0, 2π) edè di classe C 1 nell’intorno di un punto x 0 , la serie di Fourier corrispondenteconverge puntualmente af(x 0 ) = 1 2[f(x+0 ) + f(x − 0 )] (D.5)avendo indicato con f(x + 0 ) e f(x − 0 ) i limiti destro e sinistro della funzione inx 0 . Una funzione pari nell’intervallo (0, 2π) si sviluppa in serie di soli coseni,mentre una funzione dispari si sviluppa in serie di soli seni.Per le formule trigonometriche di Eulero, la (D.1) si può equivalentementescrivere nella formaf(x) =+∞ ∑−∞A n e inx(D.6)Per calcolare i coefficienti A n moltiplichiamo ambo i membri della (D.6) pere −imx e integriamo tra 0 e 2π. Usando la relazione di ortonormalità∫ 2π0e ix(n−m) dx = 2 π δ nm(D.7)ove δ nm è il simbolo di Kronecker e vale 0 se n ≠ m, 1 se n = m, abbiamo∫1 2πf(x)e −ixm dx =2π 0∞∑A n δ nm = A m−∞(D.8)Se ora consideriamo lo sviluppo (D.6) e usiamo la (D.7) abbiamo∫1 2π| f(x) | = 1 ∑∫ 2πA n A ∗ m e ix(n−m) dx2π 02π n,m 0∞∑= | A n | 2 (D.9)n=−∞che stabilisce la completezza della serie di Fourier e prende il nome di teoremadi Parseval. Di consueto, per simmetria, si considera lo svilupponell’intervallo simmetrico (−π, π), per cui le (D.6) e (D.8) diventanof(x) = ∑ nA n e inx(D.10)A n = 1 ∫ πf(x)e −ixn dx2π −π(D.11)
D.2 Integrale di FourierLe considerazioni precedenti possono essere estese al caso di una funzionequalsiasi (cioè non periodica o , che è lo stesso, periodica con periodo infinito)se, formalmente facciamo il limite T → ∞ nelle equazioni precedenti. Perquesto poniamo2πn≡ k n(D.12)TeA n = 1 ∫ T/2e −iknx f(x) dx = √ 1 F(k n ) ∆k (D.13)T −T/22πoveF(k n ) ≡ √ 1 ∫ T/2e −iknx f(x) dx(D.14)2π−T/2e ∆k = 2π/T. Le (D.10) e (D.11) divengono allora quando T → ∞ esupponendo convergenti tutti i limiti coinvoltif(x) = √ 1 ∫ ∞F(k) e ikx dk(D.15)2π−∞F(k) = 1 √2π∫ ∞−∞f(x) e −ikx dx(D.16)Convenzionalmente si dice che F(k) è la trasformata di Fourier di f(x) e chef(x) è l’ antitrasformata di Fourier di F(k).Considerando le condizioni sotto le quali il passaggio al limite dalcaso discreto al caso continuo può essere effettuato, si può dimostrare checondizione necessaria e sufficiente affinchè una funzione ammetta trasformatadi Fourier è che essa sia di classe L 2 , cioè che l’integrale del suo modulo quadrotra −∞ e +∞ sia finito.In maniera analoga e sotto condizioni del tutto simili, il formalismodelle trasformate di Fourier si estende al caso tridimensionale:∫1f(⃗r) = F((2π) ⃗ k) e i⃗k·⃗r d 3 ⃗ k (D.17)3/2F( ⃗ k) =∫1(2π) 3/2f(⃗r) e −i⃗ k·⃗r d 3 ⃗r(D.18)Per una descrizione più completa dell’argomento si faccia riferimentoagli appunti del Corso di Metodi Matematici 1 (reperibili all’indirizzo:http://www.ph.unit.it/ccl/riforma/progr 2000 comdid.html)
<strong>Appendice</strong> ECenni sui tensoriE.1 Generalità sui tensoriUn tensore è una entità costituita da componenti che, in genere, sono funzionidi un certo numero di variabili indipendenti (le coordinate in un certospazio, che individuano un punto dello spazio). L’insieme delle componentisi comporta come un tensore o meno a seconda del modo in cui le componentisi trasformano per un cambiamento di coordinate.In uno spazio a n dimensioni (cioè n variabili o coordinate) un tensoredi rango r ha n r componenti. Un tensore di rango zero ha una sola componenteA ed è chiamato scalare. Un tensore di rango 1 ha n componenti(A 1 , A 2 , ...A n ) ed è chiamato vettore. Un tensore di rango 2 ha n 2 componentie si può rappresentare sotto forma matriciale:⎛⎜⎝⎞A 11 A 12 ... A 1nA 21 A 22 ... A 2n⎟... ... ... .... ⎠A n1 A n2 ... A nnIl tensore è detto singolare se il determinante della matrice è nullo ed è dettosimmetrico se A ij = A ji per tutti gli indici i e j. I tensori di rango più altovengono rappresentati indicando la componente generica, A ijk per un tensoredi rango 3, A ijkl per un tensore di rango 4 e così via. In genere bisogna tenereconto dell’ordine degli indici, cioè A 123 ≠ A 231 , a meno di particolari proprietàdi simmetria del tensore. Si noti che quando si rappresentano le componentidi un tensore di rango 2, A ij , sotto forma di matrice il primo indice si riferiscesempre alla riga, il secondo alla colonna.
E.2 Definizione di tensoreSi consideri un sistema di coordinate x i i=1, 2, ... n nello spazio a n dimensionied un secondo sistema di coordinate x ′ l l=1, 2, ... n. Siano A ij...kle componenti di un tensore nel sistema delle x i e A ′ lm...n le sue componentinel sistema delle x ′ l . Si supponga che i due sistemi delle x i e delle x ′ j sianolegati da una trasformazione di coordinate che non sia singolare, cioè che leequazioni che esprimono le x ′ l in funzioni delle x i siano invertibili in modo dapoter esprimere le x i in funzione delle x ′ j, e che le funzioni che specificano latrasformazione x ′ l = f(x i ) siano derivabili tante volte quanto è necessario.Un’entità con componenti A ij...k nel sistema delle x i e A ′ lm...n nel sistemadelle x ′ l si comporta per definizione come un tensore covariante per latrasformazione x i → x ′ l seA ′ lm...n = ∑ i∑j... ∑ kA ij...k∂x i∂x ′ l∂x j∂x ′ m... ∂x k∂x ′ n(E.1)Similmente A ij...k si comporta per definizione come un tensore controvarianteper la trasformazione x i → x ′ l seA ′ lm...n = ∑ i∑j... ∑ kA ij...k ∂x′ l∂x i∂x ′ m∂x j... ∂x′ n∂x k(E.2)Infine A i...jk...l si comporta per definizione come un tensore misto per la trasformazionex i → x ′ l seA ′ m...np...q= ∑ i... ∑ j... ∑ k... ∑ lA i...jk..l∂x ′ m∂x i... ∂x′ n∂x j∂x k∂x ′ p... ∂x l∂x ′ q(E.3)Se si afferma semplicemente che una entità è un tensore si intende che essasi comporta come un tensore per tutte le trasformazioni delle coordinatepertinenti, non singolari e derivabili. Si può osservare che in ogni dato puntole ∂x′ sono numeri puri, per cui le trasformazioni di tensori (E.1)–(E.3) sono∂xlineari: le componenti nel nuovo sistema sono funzioni lineari delle componentinel vecchio, con coefficienti uguali a prodotti di derivate parziali primecalcolate nel punto dato.Tensori covarianti comportano derivate delle vecchie coordinate rispettoalle nuove e vengono indicati con indici posti a pedice; tensori controvarianticomportano derivate delle nuove coordinate rispetto alle vecchiee vengono indicati con indici posti ad apice; tensori misti, infine comportanoderivate di entrambi i tipi e vengono indicati con indici ad apice e a pedice incorrispondenza delle coordinate per le quali si hanno trasformazioni di tipocontrovariante e covariante rispettivamente.
Le definizioni date, applicate ad un tensore di rango zero (scalare)comportano che A ′ = A; perciò uno scalare è funzione solo della posizione, èindipendente dal sistema di coordinate e viene detto invariante.Ricordiamo, infine, il teorema principale del calcolo tensoriale: se duetensori dello stesso tipo sono uguali in un sistema di coordinate, lo sono intutti i sistemi.
<strong>Appendice</strong> FCenni sulle funzioni di BesselRiassumiamo brevemente definizioni e proprietà delle funzioni di Bessel.L’equazione differenzialed 2 Rdx 2+ 1 x( )dRdx + 1 − ν2R = 0x 2(F.1)prende il nome di equazione di Bessel; le sue soluzioni sono chiamate funzionidi Bessel di ordine ν. La forma esplicita della soluzione, indicatacomunemente con J ν (x), è:J ν (x) =( x2) ν ∞ ∑j=0(−1) jj! Γ(j + ν + 1)( x2) 2j(F.2)e prende il nome di funzione di Bessel di prima specie di ordine ν; Γ è lafunzione di Eulero, la cui rappresentazione integrale è:Γ(z) =∫ ∞0e −t t z−1 dt(F.3)Si può dimostrare che la serie che definisce la J ν (x) converge per tutti i valorifiniti di x e per ogni ν. Se ν non è un numero intero, la funzione J −ν (x), cheè a sua volta soluzione della (F.1), risulta linearmente indipendente da J ν (x)e le due funzioni J ±ν (x) costituiscono una coppia di soluzioni linearmente indipendentidell’equazione differenziale di second’ordine di Bessel. Se, invece,ν è un numero intero, le due soluzioni sono linearmente dipendenti e vale larelazione:J −ν (x) = (−1) ν J ν (x)(F.4)
Pertanto è necessario trovare un’altra soluzione linearmente indipendentequando ν è intero. Normalmente, anche quando ν non è un intero, si sostituiscela coppia J ±ν (x) con la coppia costituita la J ν (x) e da N ν (x), lacosiddetta funzione di Neumann o funzione di Bessel di seconda specie:N ν (x) = J ν(x) cosνπ − J −ν (x)sin νπ(F.5)che è linearmente indipendente da J ν (x), qualunque sia ν.Accanto alle funzioni di Bessel di prima e di seconda specie è soventeutile considerare le cosiddette funzioni di Bessel di terza specie o funzioni diHankel, definite come particolari combinazioni lineari di J ν (x) e N ν (x):H ν(1) (x) = J ν(x) + iN ν (x)H ν (2) (x) = J ν(x) − iN ν (x)(F.6)esse formano un insieme fondamentale di soluzioni dell’equazione di Bessel, alpari delle J ν (x) e N ν (x). Si noti che, facendo un parallelismo tra le funzionidi Bessel e le funzioni trigonometriche, si può dire, in un certo senso, chele funzioni J ν (x) e N ν (x) stanno a cos x e sin x come le funzioni H ν (1)(x)eH ν(2) (x) stanno agli esponenziali e iz e e −iz ; come in certi problemi che portanoa considerare funzioni di tipo trigonometrico è più opportuno a volte servirsidi seno e coseno e a volte di esponenziali, così nei problemi che portano allefunzioni di Bessel si useranno, di volta in volta, come sistema fondamentaledi soluzioni, o le funzioni J ν (x) e N ν (x) o le funzioni di Hankel, a secondadel particolare problema.Tutte le funzioni J ν (x), N ν (x), H ν (1) (x), H ν(2) (x) soddisfano le formulericorrentiΩ ν−1 (x) + Ω ν+1 (x) = 2ν x Ω ν(x)Ω ν−1 (x) − Ω ν+1 (x) = 2 dΩ ν(x)dx(F.7)(F.8)dove Ω ν (x) è una qualsiasi delle funzioni suindicate. In particolare, tenutoconto della (F.4), per ν intero si ha J ′ 0(x) = (−1) J 1 (x).In figura F.1 sono riportate le funzioni di Bessel di prima e di secondaspecie di ordine 0 e 1; in figura F.2, invece, sono riportate le derivate primedelle funzioni J 0 (x), J 1 (x), N 0 (x) ed N 1 (x).Per completezza, riportiamo i comportamenti asintotici dei vari tipi difunzioni di Bessel per valori molto grandi e molto piccoli dell’argomento. Persemplicità indicheremo soltanto i termini dominanti dei rispettivi sviluppi:
Figura F.1:• x > 1, ν ≥ 0J ν (x) → √ 2cos ( )x − νπ − π πx 2 4N ν (x) → √ 2sin ( )x − νπ − π πx 2 4(F.10)La transizione dal comportamento per x piccolo alla forma asintotica per xgrande avviene nella regione x ≃ ν.Dalle espressioni asintotiche (F.10) risulta chiaro che ciascuna dellefunzioni di Bessel, presentando un andamento oscillatorio attorno al valorezero, ha un numero infinito di zeri; questo è visibile nella figura (F.1) per lefunzioni di prima e seconda specie di ordine 0 e 1, mentre dalla figura (F.2)si può dedurre che anche le derivate prime delle summenzionate funzionigodono della stessa proprietà. Consideriamo in particolare le radici di J ν (x):J ν (x νm ) = 0 n = 1, 2, 3, .... (F.11)
Figura F.2:dove x νm è la radice m–esima di J ν (x). Per i primi tre valori di ν le primetre radici sono:ν=0, x 0n = 2.405, 5.520, 8.654, ...ν=1, x 1n = 3.832, 7.016, 10.173, ...ν=2, x 2n = 5.136, 8.417, 11.620, ...(si noti che gli zeri risultano spaziati di circa π.)Per gli zeri ulteriori la formula asintotica:x νn ≃ nπ + (ν − 1/2) π 2(F.12)dà una approssimazione sufficiente.Le funzioni di Bessel di ordine intero (ν=n) vengono anche indicatecome funzioni di Bessel cilindriche, mentre si indicano generalmente colnome di funzioni di Bessel sferiche quelle ad indice semintero (ν= n+1/2).Tali denominazioni derivano dalle simmetrie dei problemi che portano allaconsiderazione di queste funzioni.È invalso l’uso di definire le funzioni sferiche di Bessel e Hankel,indicate con i simboli j l (x), h l (x) e n l (x), nel modo seguente:j l (x) =n l (x) =( ) π 1/2Jl+1/2 (x)2x( ) π 1/2Nl+1/2 (x)2x
h (1,2)l (x) =( π2x) 1/2 [Jl+1/2(x) ± iN l+1/2 (x) ] (F.13)Per x reale h (2)l (x) è il complesso coniugato di h (1)l (x).Per i primi valori dell’indice l, le forme esplicite delle (F.13) sono:j 0 (x) = sin xxn 0 (x) = − cos xxh (1)0 (x) = eixixj 1 (x) = sin xx 2n 1 (x) = − cos xx 2h (1)1 (x) = − eixxj 2 (x) = ( 3x 3n 2 (x) = − ( 3h (1)2 (x) = ieixx− cos xx− sin xx )(1 +i) x− 1 x sin x −3cos xx 2− 1 x 3 xx 2)cosx −3sinx(1 +3ix − 3 x 2 )j 3 (x) = ( ) (15− 6 x 4 x sin x − 152 x 3n 3 (x) = − ( ) (15− 6 x 4 x cosx − 152 x 3(1 +6i− 15x x 2)− 15ix 3− 1 x− 1 x)cos x)sin xh (1)3 (x) = eixxin figura F.3 sono riportate j 0 (x), n 0 (x), j 1 (x) e n 1 (x).Figura F.3:Per piccoli valori di x si hanno le seguenti espressioni asintotiche:x l (x 2 )j l (x) →1 −(2l + 1) !! 2(2l + 3) + ...
((2l − 1) !!n l (x) → − 1 −x l+1x 2 )2(1 − 2l) + ...(F.14)Analogamente si ottengono le espressioni asintotiche per grandi valori di x:j l (x) → 1 (x sin x − lπ )2n l (x) → − 1 (x cos x − lπ )2h (1)l+1 eixl (x) → (−i)xLe funzioni di Bessel sferiche soddisfano le relazioni ricorrenti:2l + 1z l (x) = z l−1 (x) + z l+1 (x)xz ′ l (x) = 12l + 1 [lz l−1(x) − (l + 1)z l+1 (x)](F.15)(F.16)(F.17)dove z l (x) rappresenta una qualsiasi delle funzioni j l (x), n l (x), h (1)l (x), h (2)l (x).Accenniamo, infine, alle funzioni di Bessel modificate. Esse sonosoluzioni dell’equazione differenziale:d 2 R+ 1 ( )dRdx 2 x dx − 1 + ν2R = 0(F.18)x 2e, come evidente, non sono altro che funzioni di Bessel con argomento immaginariopuro. Ordinariamente, nella scelta di una coppia di soluzioni linearmenteindipendenti, queste sono indicate come I ν (x) e K ν (x), e sono definitedalle:I ν (x) = i −ν J ν (ix)(F.19)K ν (x) = π 2 iν+1 H (1)ν (ix) (F.20)che sono funzioni reali per x e ν reali. Le loro espressioni asintotiche per xpiccolo e per x grande, supponendo x reale e positivo o nullo, sono:• x
• x >> 1, ν ≥ 0I ν (x) → 1 √2πxe xK ν (x) →√ π2x e−x(F.22)In figura F.4 sono riportate I 0 (x), K 0 (x), I 1 (x) e K 1 (x).Figura F.4: