ISTITUZIONI DI FISICA MATEMATICA Corso di 6 Crediti Corso di ...
ISTITUZIONI DI FISICA MATEMATICA Corso di 6 Crediti Corso di ...
ISTITUZIONI DI FISICA MATEMATICA Corso di 6 Crediti Corso di ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>ISTITUZIONI</strong> <strong>DI</strong> <strong>FISICA</strong><strong>MATEMATICA</strong><strong>Corso</strong> <strong>di</strong> 6 Cre<strong>di</strong>ti<strong>Corso</strong> <strong>di</strong> Laurea Specialistica inMatematicaA.A. 2007-2008Cornelis VAN DER MEEDipartimento <strong>di</strong> Matematica e InformaticaUniversità <strong>di</strong> CagliariViale Merello 92, 09123 Cagliari070-6755605 (stu<strong>di</strong>o), 070-6755601 (FAX), 335-5287988 (cell.)cornelis@krein.unica.ithttp:\\bugs.unica.it\∼cornelisoppure: http:\\krein.unica.it\∼cornelis
In<strong>di</strong>ceI EQUAZIONI DELLA <strong>FISICA</strong> <strong>MATEMATICA</strong> 11 Coor<strong>di</strong>nate ortogonali . . . . . . . . . . . . . . . . . . . . . . . . 12 Separazione delle variabili . . . . . . . . . . . . . . . . . . . . . 43 Equazione <strong>di</strong> Helmholtz . . . . . . . . . . . . . . . . . . . . . . 93.1 Equazione <strong>di</strong> Helmholtz nell’Intervallo . . . . . . . . . . 93.2 Equazione <strong>di</strong> Helmholtz nel Rettangolo . . . . . . . . . . 134 Equazioni delle onde e del calore . . . . . . . . . . . . . . . . . . 144.1 Equazioni delle onde e del calore nell’intervallo . . . . . . 144.2 Equazioni delle onde e del calore nel rettangolo . . . . . 17II ANALISI FUNZIONALE 211 Spazi <strong>di</strong> Banach . . . . . . . . . . . . . . . . . . . . . . . . . . . 212 Spazi <strong>di</strong> Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . 233 Basi ortonormali in spazi <strong>di</strong> Hilbert . . . . . . . . . . . . . . . . 254 Applicazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275 Operatori lineari . . . . . . . . . . . . . . . . . . . . . . . . . . 295.1 Proprietà generali . . . . . . . . . . . . . . . . . . . . . . 295.2 Proprietà spettrali . . . . . . . . . . . . . . . . . . . . . 315.3 Operatori autoaggiunti e unitari . . . . . . . . . . . . . . 335.4 Operatori autoaggiunti non limitati . . . . . . . . . . . . 36III EQUAZIONI <strong>DI</strong>FFERENZIALI E FUNZIONI SPECIALI 391 Equazioni Differenziali <strong>di</strong> Secondo Or<strong>di</strong>ne . . . . . . . . . . . . 392 Metodo <strong>di</strong> Frobenius . . . . . . . . . . . . . . . . . . . . . . . . 413 Funzioni Ipergeometriche . . . . . . . . . . . . . . . . . . . . . . 464 Funzioni <strong>di</strong> Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . 504.1 Definizione e proprietà semplici . . . . . . . . . . . . . . 504.2 Funzioni <strong>di</strong> Bessel <strong>di</strong> seconda specie . . . . . . . . . . . . 524.3 Ortogonalità e zeri . . . . . . . . . . . . . . . . . . . . . 544.4 Altre funzioni cilindriche . . . . . . . . . . . . . . . . . . 584.5 Funzioni sferiche <strong>di</strong> Bessel . . . . . . . . . . . . . . . . . 60i
5 Funzioni sferiche . . . . . . . . . . . . . . . . . . . . . . . . . . 615.1 Funzioni sferiche . . . . . . . . . . . . . . . . . . . . . . 625.2 Polinomi <strong>di</strong> Legendre . . . . . . . . . . . . . . . . . . . . 635.3 Funzioni <strong>di</strong> Legendre associate . . . . . . . . . . . . . . . 695.4 Le funzioni sferiche per n = 3: Completezza . . . . . . . 706 Polinomi <strong>di</strong> Hermite . . . . . . . . . . . . . . . . . . . . . . . . 717 Polinomi <strong>di</strong> Laguerre . . . . . . . . . . . . . . . . . . . . . . . . 748 Polinomi <strong>di</strong> Chebyshev . . . . . . . . . . . . . . . . . . . . . . . 799 Polinomi Ortogonali Generali . . . . . . . . . . . . . . . . . . . 81IV EQUAZIONI INTEGRALI 871 Proprietà Elementari e Iterazione . . . . . . . . . . . . . . . . . 872 Equazioni integrali <strong>di</strong> Volterra . . . . . . . . . . . . . . . . . . . 923 Equazioni Integrali con Nucleo Hermitiano . . . . . . . . . . . . 944 Teorema <strong>di</strong> Hilbert-Schmidt . . . . . . . . . . . . . . . . . . . . 101V PROBLEMI <strong>DI</strong> STURM-LIOUVILLE 1051 Problema <strong>di</strong> Sturm-Liouville . . . . . . . . . . . . . . . . . . . . 1051.1 Funzione <strong>di</strong> Green . . . . . . . . . . . . . . . . . . . . . 1061.2 Riduzione ad un’equazione integrale . . . . . . . . . . . . 1101.3 Proprietà degli autovalori e delle autofunzioni . . . . . . 1122 Problemi <strong>di</strong> Sturm-Liouville singolari . . . . . . . . . . . . . . . 115VI FUNZIONI <strong>DI</strong> GREEN 1211 Classificazione delle equazioni alle derivate parziali . . . . . . . . 1212 Problemi agli autovalori multi<strong>di</strong>mensionali . . . . . . . . . . . . 1232.1 Impostazione del problema agli autovalori . . . . . . . . 1232.2 Formule <strong>di</strong> Green . . . . . . . . . . . . . . . . . . . . . . 1242.3 Proprietà dell’operatore L . . . . . . . . . . . . . . . . . 1253 Equazioni ellittiche . . . . . . . . . . . . . . . . . . . . . . . . . 1273.1 Equazioni <strong>di</strong> Laplace e <strong>di</strong> Poisson . . . . . . . . . . . . . 1283.1.a Equazione <strong>di</strong> Poisson negli intervalli . . . . . . 1293.1.b Funzione <strong>di</strong> Green in R n . . . . . . . . . . . . . 1313.1.c Equazione <strong>di</strong> Laplace nel semipiano . . . . . . . 1343.1.d Equazione <strong>di</strong> Laplace nel <strong>di</strong>sco . . . . . . . . . 1353.1.e Equazione <strong>di</strong> Laplace e funzioni analitiche . . . 1383.1.f Equazione <strong>di</strong> Laplace nella sfera n-<strong>di</strong>mensionale 1403.2 Equazione <strong>di</strong> Helmholtz . . . . . . . . . . . . . . . . . . 1414 Equazioni paraboliche . . . . . . . . . . . . . . . . . . . . . . . 1444.1 Esempi su intervalli limitati . . . . . . . . . . . . . . . . 1454.2 Esempi su domini illimitati . . . . . . . . . . . . . . . . . 149ii
5 Equazioni iperboliche . . . . . . . . . . . . . . . . . . . . . . . . 152A LA FUNZIONE GAMMA 157B PROPRIETÀ ASINTOTICHE 1631 Rappresentazioni integrali delle funzioni <strong>di</strong> MacDonald . . . . . 1632 Sviluppo asintotico delle funzioni <strong>di</strong> Bessel . . . . . . . . . . . . 165C EQUAZIONE <strong>DI</strong> SCHRÖ<strong>DI</strong>NGER 1671 La buca <strong>di</strong> potenziale . . . . . . . . . . . . . . . . . . . . . . . . 1712 Oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . 1733 Atomo d’idrogeno . . . . . . . . . . . . . . . . . . . . . . . . . . 176D TRASFORMATA <strong>DI</strong> FOURIER 1791 Trasformata <strong>di</strong> Fourier negli spazi L 1 e L 2 . . . . . . . . . . . . . 1792 Funzioni Generalizzate <strong>di</strong> Crescita Lenta . . . . . . . . . . . . . 1823 Trasformata <strong>di</strong> Fourier in S ′ . . . . . . . . . . . . . . . . . . . . 1843.1 Proprietà della trasformazione <strong>di</strong> Fourier . . . . . . . . . 188E INTEGRAZIONE SECONDO LEBESGUE 1911 Insiemi <strong>di</strong> Borel . . . . . . . . . . . . . . . . . . . . . . . . . . . 1912 Integrale <strong>di</strong> Lebesgue . . . . . . . . . . . . . . . . . . . . . . . . 1933 Alcuni Teoremi Importanti . . . . . . . . . . . . . . . . . . . . . 196F FUNZIONI ANALITICHE 199G APPROSSIMAZIONE DA POLINOMI 205BIBLIOGRAFIA 207iii
Capitolo IEQUAZIONI DELLA <strong>FISICA</strong><strong>MATEMATICA</strong>1 Coor<strong>di</strong>nate ortogonaliSia Ω un insieme aperto in R 3 . Sia u = (u 1 , u 2 , u 3 ) una trasformazione <strong>di</strong> classeC 2 delle variabili cartesiane x = (x 1 , x 2 , x 3 ) ∈ Ω in R 3 tale che la matriceJacobiana è invertibile. Allora localmente esiste una corrispondenza biunivocatra le coor<strong>di</strong>nate cartesiane x = (x 1 , x 2 , x 3 ) e quelle curvilinee u = (u 1 , u 2 , u 3 ).Derivando le variabili x 1 , x 2 , x 3 rispetto alle variabili u 1 , u 2 , u 3 otteniamodx i =3∑j=1∂x i∂u jdu j .Quin<strong>di</strong> la <strong>di</strong>stanza al quadrato tra due punti vicini tra loro è3∑3∑ds 2 = dx 2 i = g ij du i du j ,dovei=1g kl =3∑j=1i,j=1∂x j∂u k∂x j∂u lè la cosiddetta metrica. La trasformazione si <strong>di</strong>ce ortogonale se la metrica{g kl } 3 k,l=1 è una matrice <strong>di</strong>agonale, cioè se le righe della matrice Jacobiana⎡⎤∂x 1 ∂x 2 ∂x 3∂u 1 ∂u 1 ∂u 1∂x 1 ∂x 2 ∂x 3J =⎢ ∂u⎣ 2 ∂u 2 ∂u 2 ⎥∂x 1 ∂x 2 ∂x 3⎦∂u 3 ∂u 3 ∂u 31
sono ortogonali. In altre parole, la trasformazione si <strong>di</strong>ce ortogonale seIn tal casodoveh k =g kl =[ 3∑j=13∑j=1∂x j∂u k∂x j∂u l= 0, k ≠ l.ds 2 =3∑(h i du i ) 2 ,i=1( ∂xj∂u k) 2] 1/2, k = 1, 2, 3.Si vede facilmente che la matrice <strong>di</strong>ag (1/h 1 , 1/h 2 , 1/h 3 ) J è ortogonale (cioè,U −1 = U T e quin<strong>di</strong> det U ∈ {−1, +1}). Dunque| det J| = h 1 h 2 h 3 .Per ogni punto (u 1 , u 2 , u 3 ) per cui (± det J) > 0, ci passano tre superficiu i = costante (i = 1, 2, 3). In questo punto definiamo il vettore e i <strong>di</strong> lunghezza1 normale alla superficie u i = costante e nella <strong>di</strong>rezione in cui cresce u i . In talcaso i tre vettori e 1 , e 2 , e 3 formano un sistema <strong>di</strong> coor<strong>di</strong>nate cartesiane taleche ±(e 1 · (e 2 × e 3 )) > 0.Il gra<strong>di</strong>ente <strong>di</strong> ψ ha la forma∇ψ =3∑j=11h j∂ψ∂u je j ,la <strong>di</strong>vergenza della funzione V = V 1 e 1 + V 2 e 2 + V 3 e 3 a valori vettoriali ha laforma[1 ∂∇ · V =(V 1 h 2 h 3 ) +∂ (V 2 h 3 h 1 ) +∂ ](V 3 h 1 h 2 ) ,h 1 h 2 h 3 ∂u 1 ∂u 2 ∂u 3e il rotore <strong>di</strong> V ha la forma[(1 ∂(h3 V 3 )∇ × V =− ∂(h )2V 2 )h 1 e 1 +h 1 h 2 h 3 ∂u 2 ∂u( 3∂(h1 V 1 )+ − ∂(h ) ]3V 3 )h 3 e 3 .∂u 3 ∂u 1Quin<strong>di</strong> l’operatore <strong>di</strong> Laplace, oppure il Laplaciano,∆ = ∇ 2 =23∑j=1∂ 2∂x 2 j( ∂(h1 V 1 )− ∂(h )3V 3 )h 2 e 2∂u 3 ∂u 1
ha la seguente rappresentazione:∆ψ =1h 1 h 2 h 3[ ∂∂u 1(h2 h 3h 1)∂ψ+ ∂ (h3 h 1∂u 1 ∂u 2 h 2)∂ψ+ ∂ (h1 h 2∂u 2 ∂u 3 h 3)]∂ψ.∂u 3Esempio I.1 Introduciamo ora alcuni sistemi <strong>di</strong> coor<strong>di</strong>nate ortogonali.a. Coor<strong>di</strong>nate Cilindriche: x = r cos θ, y = r sin θ, z = z. dove r ≥ 0,0 ≤ θ < 2π, z ∈ R. Allora h r = 1, h θ = r, h z = 1. In tal caso∆ψ = ∂2 ψ∂r + 1 ∂ψ2 r ψr + 1 ∂ 2 ψr 2 ∂θ + ∂2 ψ2 ∂z . 2(I.1)Sostituendo per ψ una funzione ψ = ψ(r, θ) che non <strong>di</strong>pende da z si troval’operatore <strong>di</strong> Laplace in coor<strong>di</strong>nate polari:∆ψ = ∂2 ψ∂r + 1 ∂ψ2 r ψr + 1 ∂ 2 ψr 2 ∂θ . 2(I.2)b. Coor<strong>di</strong>nate Sferiche: x = ρ sin ϕ cos θ, y = ρ sin ϕ sin θ, z = ρ cos ϕ,dove ρ ≥ 0, ϕ ∈ [0, π], θ ∈ [0, 2π). Allora h ρ = 1, h ϕ = ρ, h θ = ρ sin ϕ.In tal caso∆ψ = ∂2 ψ∂ρ + 2 ∂ψ2 ρ ψρ + 1 ∂ 2 ψρ 2 sin 2 ϕ ∂θ + 12 ρ 2 sin ϕ∂∂ϕ(sin ϕ ∂ψ ). (I.3)∂ϕIntroducendo la nuova variabile ξ = cos ϕ ∈ [−1, 1] (tale che dξ =− sin ϕ dϕ, 1 − ξ 2 = sin 2 ϕ) otteniamo 1∆ψ = ∂2 ψ∂ρ + 2 ∂ψ2 ρ ψρ + 1 ∂ 2 ψρ 2 (1 − ξ 2 ) ∂θ + 1 (∂(1 − ξ 2 ) ∂ψ ). (I.4)2 ρ 2 ∂ξ ∂ξc. Coor<strong>di</strong>nate Parabolico-cilindriche (ve<strong>di</strong> [14]): x = c 2 (u2 − v 2 ), y =cuv, z = z, dove u ∈ R, v ≥ 0, z ∈ R, e c è una costante positiva. Allorah u = h v = c √ u 2 + v 2 , h z = 1.In tal caso∆ψ =( )1 ∂ 2 ψc 2 (u 2 + v 2 ) ∂u + ∂2 ψ+ ∂2 ψ2 ∂v 2 ∂z . 2(I.5)1 Usando le coor<strong>di</strong>nate ortogonali (ρ, θ, ξ) <strong>di</strong>rettamente si trovano le espressioni h ρ = 1,h θ = ρ √ 1 − ξ 2 e h ξ = (ρ/ √ 1 − ξ 2 ).3
d. Coor<strong>di</strong>nate Ellittico-cilindriche (ve<strong>di</strong> [14]): x = c cosh u cos v, y =c sinh u sin v, z = z, dove u > 0, v ∈ [0, 2π], z ∈ R, e c è una costantepositiva. Allora{h u = h v = c √ cosh 2 u sin 2 v + sinh 2 u cos 2 v = c √ sinh 2 u + sin 2 v,h z = 1.In tal caso∆ψ =( )1 ∂ 2 ψc 2 [sinh 2 u + sin 2 v] ∂u + ∂2 ψ+ ∂2 ψ2 ∂v 2 ∂z . 2(I.6)2 Separazione delle variabili1. Separazione in Coor<strong>di</strong>nate Cartesiane. Consideriamo l’equazione <strong>di</strong>Helmholtz∆ψ + k 2 ψ = 0in tre variabili (x, y, z) per k ≥ 0 nel dominio [0, a] × [0, b] × [0, c]. Ponendoψ(x, y, z) = X(x)Y (y)Z(z),dove X(x), Y (y) e Z(z) sono <strong>di</strong> classe C 2 , si trova0 = ∆ψψ+ k2 = X′′ (x)X(x) + Y ′′ (y)Y (y) + Z′′ (z)Z(z) + k2 .In tal caso esistono tre costanti k 2 x, k 2 y e k 2 z tali cheX ′′ (x)X(x) + k2 x = Y ′′ (y)Y (y) + k2 y = Z′′ (z)Z(z) + k2 z = 0,dovek 2 x + k 2 y + k 2 z = k 2 .2. Separazione in Coor<strong>di</strong>nate Polari. Consideriamo l’equazione <strong>di</strong> Helmholtz∆ψ + k 2 ψ = 0in due variabili (x, y) per k ≥ 0 nel dominioD ={(x, y) : 0 ≤ √ }x 2 + y 2 ≤ L ,4
dove L ∈ (0, +∞). Ponendoψ(r, θ) = R(r)Θ(θ),dove R(r) e Θ(θ) sono funzioni <strong>di</strong> classe C 2 in r ∈ (0, L) e θ ∈ R con Θ(θ+2π) =Θ(θ), si trovaoppure0 = ∆ψψ + k2 = 1 [ d 2 RR(r) dr + 1 2 r[r 2 d 2 RR(r) dr + 1 2 r]dR+ 1 d 2 Θdr r 2 Θ(θ) dθ + 2 k2 ,]dR+ k 2 r 2 + 1 d 2 ΘdrΘ(θ) dθ = 0. 2L’espressione precedente è la somma costante <strong>di</strong> una funzione <strong>di</strong> r (che non<strong>di</strong>pende da θ) e una funzione <strong>di</strong> θ (che non <strong>di</strong>pende da r). Dunque i duetermini devono essere costanti.Proposizione I.2 Sia Θ(θ) una funzione <strong>di</strong> classe C 2 , non banale, tale che1Θ(θ)d 2 Θ= −C, Θ(θ + 2π) ≡ Θ(θ).dθ2 Allora C = m 2 per qualche m = 0, 1, 2, · · · e{costante, m = 0Θ(θ) =cost 1 cos mθ + cost 2 sin mθ, m = 1, 2, 3, · · · .Dimostrazione.Prima <strong>di</strong>mostriamo che C ≥ 0. Infatti,C∫ 2π0∫ 2π|Θ(θ)| 2 dθ = −= −=0∫ 2π0Θ ′′ (θ)Θ(θ) dθ[Θ ′ (θ)Θ(θ)] 2π0+|Θ ′ (θ)| 2 dθ ≥ 0,∫ 2π0|Θ ′ (θ)| 2 dθpoichè il primo termine della seconda parte si annulla per motivi <strong>di</strong> perio<strong>di</strong>citàe Θ ′ (θ) ≢ 0. Quin<strong>di</strong> C ≥ 0.D’altra parte, per C > 0 troviamo la soluzione generaleΘ(θ) = c 1 cos(θ √ −C) + c 2 sin(θ √ −C)5
dell’equazione Θ ′′ = −CΘ. Risulta il sistema <strong>di</strong> equazioni lineari[ √ √ ] [ ] [ ]1 − cos(2π C) − sin(2π C)sin(2π √ C) 1 − cos(2π √ c1 0=C) c 2 0con determinante 2(1 − cos(2π √ C)). Il determinante si annulla se e solo seC = m 2 per m ∈ N. In tal caso tutti gli elementi della matrice si annullano equin<strong>di</strong> le costanti c 1 e c 2 sono arbitrarie.Infine, per C = 0 troviamo la soluzione generale Θ(θ) = c 1 + c 2 θ. In talcaso Θ(θ + 2π) ≡ Θ(θ) implica c 2 = 0.✷Sostituendo1 d 2 ΘΘ(θ) dθ 2d 2 Rdr 2= −m2 per m = 0, 1, 2, · · · , otteniamo+ 1r[ ]dRdr + k 2 − m2R(r) = 0r 2con le con<strong>di</strong>zioni al contorno R(0 + ) finito e R(L) = 0. Se invece della con<strong>di</strong>zione<strong>di</strong> Dirichlet ψ| ∂D ≡ 0 si considera la con<strong>di</strong>zione <strong>di</strong> Neumann ∂ψ | ∂n ∂D ≡ 0,risultano le con<strong>di</strong>zioni al contorno R(0 + ) finito e R ′ (L) = 0.Per k = 0 si trova l’equazione <strong>di</strong> Eulero r 2 R ′′ (r) + rR ′ (r) − m 2 R(r) = 0con soluzione generale{c 1 + c 2 log r, m = 0R(r) =c 1 r m + c 2 r −m , m = 1, 2, 3, · · · .La con<strong>di</strong>zione che R(0 + ) sia finito, implica c 2 = 0. In tal caso R(L) ≠ 0 perogni L > 0, eccetto nel caso banale c 1 = c 2 = 0. Quin<strong>di</strong> per k = 0 non ci sonosoluzioni non banali. Purtroppo, se stu<strong>di</strong>amo l’equazione <strong>di</strong> Helmholtz con lacon<strong>di</strong>zione <strong>di</strong> Neumann, risulta la soluzione non banale costante se m = 0; perm = 1, 2, 3, · · · non ci sono soluzioni non banali.Per k > 0 si ponga ρ = kr. In tal caso risulta l’equazione <strong>di</strong>fferenziale <strong>di</strong>Besseld 2 Rdρ + 1 ( )dR2 ρ dρ + 1 − m2R(ρ) = 0.ρ 2Quest’equazione ha una singola soluzione linearmente in<strong>di</strong>pendente limitata seρ → 0 + . Con un’opportuna normalizzazione questa soluzione si chiama J m (ρ),la cosiddetta funzione <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne m.3. Separazione in Coor<strong>di</strong>nate Sferiche. Consideriamo l’equazione <strong>di</strong>Schrö<strong>di</strong>nger∆ψ + k 2 ψ = V ( √ x 2 + y 2 + z 2 )ψ6
nelle variabili (x, y, z) per k > 0, dove il potenziale V <strong>di</strong>pende soltanto dallavariabile r = √ x 2 + y 2 + z 2 ). È compreso il caso dell’equazione <strong>di</strong> Helmholtz(V ≡ 0). Ponendoψ(r, θ, ϕ) = R(r)S(θ, ϕ),dove R(r) e S(θ, ϕ) sono funzioni <strong>di</strong> classe C 2 in r ∈ (0, +∞) e (θ, ϕ) ∈R × (0, π), si trova facilmente0 = ∆ψψ + k2 − V = 1 [ d 2 RR(r) dr + 2 ]dR2 r dr[1 1 ∂ 2 S+r 2 S(θ, ϕ) sin 2 ϕ ∂θ + 1 (∂sin ϕ ∂S )]+ k 2 − V (r).2 sin ϕ ∂ϕ ∂ϕQuin<strong>di</strong>1 ∂ 2 Ssin 2 ϕ ∂θ + 12 sin ϕd 2 Rdr 2+ 2 r∂∂ϕ(sin ϕ ∂S )= −CS(θ, ϕ),∂ϕ(dRdr + k 2 − C )R(r) = V (r)R(r),r 2dove C è una costante.L’equazione <strong>di</strong>fferenziale per S(θ, ϕ) ha soltanto una soluzione non banaleper opportuni valori della costante C. Per tali valori <strong>di</strong> C le funzioni S(θ, ϕ)sono multipli delle cosiddette funzioni sferiche.Consideriamo ora l’equazione per S(θ, ϕ). PonendoS(θ, ϕ) = Θ(θ)Φ(ϕ),si trova la cosiddetta equazione <strong>di</strong> BeltramiCome al solito,1 1sin 2 ϕ Θ(θ)d 2 Θdθ + 121 dΦ(ϕ) sin ϕ dϕ1 d 2 ΘΘ(θ) dθ = 2 −m2 ,(sin ϕ dΦ )+ C = 0.dϕdove m = 0, 1, 2, · · · . Utilizzando la trasformazione X(ξ) = Φ(arccos ξ), ξ =cos ϕ, arriviamo all’equazione <strong>di</strong>fferenziale(d(1 − ξ 2 ) dX ))+(C − m2X(ξ) = 0.dξ dξ1 − ξ 2Quest’equazione è l’equazione <strong>di</strong>fferenziale per le funzioni associate <strong>di</strong> Legendre.Le sue soluzioni non banali limitate se ξ → ±1 esistono soltanto per7
C = l(l + 1), dove l = m, m + 1, m + 2, · · · . Nel caso particolare m = 0 siottiene l’equazione <strong>di</strong>fferenziale <strong>di</strong> Legendre(d(1 − ξ 2 ) dX )+ l(l + 1)X(ξ) = 0,dξ dξdove l = 0, 1, 2, · · · .Ritorniamo all’equazione per R(r) con C = l(l + 1):d 2 Rdr 2+ 2 rdRdr + k2 R(r) =dove m = −l, −l + 1, · · · , l − 2, l − 1, l.()l(l + 1)V (r) + R(r),r 24. Separazione in Coor<strong>di</strong>nate Parabolico-Cilindriche. L’equazione <strong>di</strong>Laplace in coor<strong>di</strong>nate parabolico-cilindriche (u, v, z) (anche dette coor<strong>di</strong>nateparaboliche) ha la forma (I.5). Sostituendoψ(u, v, z) = U(u)V (v)Z(z)otteniamo(1 U ′′ (u)c 2 (u 2 + v 2 ) U(u) + V )′′ (v)+ Z′′ (z)V (v) Z(z) = 0.Se richie<strong>di</strong>amo che Z(z) sia limitata, risulta(1 U ′′ (u)c 2 (u 2 + v 2 ) U(u) + V )′′ (v)= − Z′′ (z)V (v) Z(z) = λ2 ,dove λ ≥ 0 è una costante. DunqueU ′′ (u) + (µ − λ 2 c 2 u 2 )U(u) = 0,V ′′ (v) − (µ + λ 2 c 2 v 2 )V (v) = 0,dove µ è un’altra costante. Introducendo le variabili ξ = u √ cλ e η = v √ cλ,dove ξ ∈ R e η ≥ 0, e ponendo µ = (2ν + 1)cλ otteniamoStu<strong>di</strong>amo ora l’equazioneU ′′ (ξ) + (2ν + 1 − ξ 2 )U(ξ) = 0,V ′′ (η) − (2ν + 1 + η 2 )V (η) = 0.u ′′ + (2ν + 1 − z 2 )u = 0,dove u, z e ν non hanno più lo stesso significato come prima. Sostituendorisulta l’equazioneu = e −z2 /2 v,v ′′ − 2zv ′ + 2νv = 0.Per ν = 0, 1, 2, . . . la (I.9) si <strong>di</strong>ce equazione <strong>di</strong>fferenziale <strong>di</strong> Hermite.soluzioni della (I.7) si <strong>di</strong>cono funzioni parabolico-cilindriche.8(I.7)(I.8)(I.9)Le
3 Equazione <strong>di</strong> HelmholtzIn questa parte vengono calcolati gli autovalori e le corrispondenti autofunzioninormalizzate dell’equazione <strong>di</strong> Helmholtz in dominio abbastanza semplici.3.1 Equazione <strong>di</strong> Helmholtz nell’IntervalloConsideriamo l’equazione <strong>di</strong> Helmholtzcon una delle seguenti con<strong>di</strong>zioni al contorno:u ′′ + k 2 u = 0, 0 < x < L, (I.10)u(0) = u(L) = 0, Dirichlet (I.11)u ′ (0) = u ′ (L) = 0, Neumann (I.12)u(0) = u ′ (L) = 0, Dirichlet a sinistra, Neumann a destra (I.13)u ′ (0) = u(L) = 0, Neumann a sinistra, Dirichlet a destra (I.14)u(0) = u(L), u ′ (0) = u ′ (L), con<strong>di</strong>zioni perio<strong>di</strong>che (I.15)u(0) = 0, (cos α)u(L) + (sin α)u ′ (L) = 0,(cos β)u(0) − (sin β)u ′ (0) = 0, (cos α)u(L) + (sin α)u ′ (L) = 0,(I.16)(I.17)dove 0 ≤ α ≤ (π/2) e 0 ≤ β ≤ (π/2). Le con<strong>di</strong>zioni (I.16) e (I.17) si chiamanomiste. In tutti i casi determineremo gli autovalori e le autofunzioni del problemaal contorno. In tutti i casi gli autovalori k 2 sono positivi, tranne nel casodelle con<strong>di</strong>zioni <strong>di</strong> Neumann (I.12), dove si annulla uno degli autovalori.a. Con<strong>di</strong>zioni <strong>di</strong> Dirichlet. Per trovare una soluzione non banale del problemaal contorno supponiamo che k > 0. Utilizzando la con<strong>di</strong>zione u(0) = 0si ottieneu(x) ∼ sin(kx).L’altra con<strong>di</strong>zione u(L) = 0 conduce alla con<strong>di</strong>zionesin(kL) = 0 ⇔ kL = nπ, n = 1, 2, 3, . . . .Quin<strong>di</strong> gli autovalori λ n = kn 2 = (nπ/L) 2 e le autofunzioni ϕ n (x) ∼ sin(nπx/L)per n = 1, 2, 3, . . .. Ortonormalizzando le autofunzioni in L 2 (0, L) otteniamo( nπ)√2 2( nπx)λ n = , ϕn (x) =LL sin , (I.18)Ldove n = 1, 2, 3, . . .. Le autofunzioni formano una base ortonormale <strong>di</strong> L 2 (0, L).9
. Con<strong>di</strong>zioni <strong>di</strong> Neumann. Per trovare una soluzione non banale delproblema al contorno supponiamo che k ≥ 0. Utilizzando la con<strong>di</strong>zione u ′ (0) =0 si ottieneu(x) ∼ cos(kx).L’altra con<strong>di</strong>zione u(L) = 0 conduce alla con<strong>di</strong>zionecos(kL) = 0 ⇔ kL = nπ, n = 0, 1, 2, 3, . . . .Quin<strong>di</strong> gli autovalori λ n = kn 2 = (nπ/L) 2 e le autofunzioni ϕ n (x) ∼ cos(nπx/L)per n = 0, 1, 2, 3, . . .. Ortonormalizzando le autofunzioni in L 2 (0, L) otteniamo⎧⎪⎨ λ 0 = 0, ϕ 0 (x) = √ 1 ,L( nπ)√2 2( nπx)(I.19)⎪⎩ λ n = , ϕn (x) =LL cos ,Ldove n = 0, 1, 2, 3, . . ..L 2 (0, L).Le autofunzioni formano una base ortonormale <strong>di</strong>c. Con<strong>di</strong>zione <strong>di</strong> Dirichlet in x = 0 e <strong>di</strong> Neumann in x = L. Per trovareuna soluzione non banale del problema al contorno supponiamo che k > 0.Utilizzando la con<strong>di</strong>zione u(0) = 0 si ottieneu(x) ∼ sin(kx).L’altra con<strong>di</strong>zione u ′ (L) = 0 conduce alla con<strong>di</strong>zione(cos(kL) = 0 ⇔ kL = n − 1 )π, n = 1, 2, 3, . . . .2Quin<strong>di</strong> gli autovalori λ n = kn 2 = ((n − 1 2 )π/L)2 e le autofunzioni ϕ n (x) ∼sin((n − 1 )πx/L) per n = 1, 2, 3, . . .. Ortonormalizzando le autofunzioni in2L 2 (0, L) otteniamo(( ) 2 √ (( )n −1λ n =2)π2 n −1, ϕ n (x) =2)πxLL sin , (I.20)Ldove n = 1, 2, 3, . . .. Le autofunzioni formano una base ortonormale <strong>di</strong> L 2 (0, L).d. Con<strong>di</strong>zione <strong>di</strong> Neumann in x = 0 e <strong>di</strong> Dirichlet in x = L. Pertrovare una soluzione non banale del problema al contorno supponiamo chek > 0. Utilizzando la con<strong>di</strong>zione u ′ (0) = 0 si ottieneu(x) ∼ cos(kx).10
L’altra con<strong>di</strong>zione u(L) = 0 conduce alla con<strong>di</strong>zione(cos(kL) = 0 ⇔ kL = n − 1 )π, n = 1, 2, 3, . . . .2Quin<strong>di</strong> gli autovalori λ n = kn 2 = ((n − 1 2 )π/L)2 e le autofunzioni ϕ n (x) ∼cos((n − 1 )πx/L) per n = 1, 2, 3, . . .. Ortonormalizzando le autofunzioni in2L 2 (0, L) otteniamo(( ) 2 √ (( )n −1λ n =2)π2 n −1, ϕ n (x) =2)πxLL cos , (I.21)Ldove n = 1, 2, 3, . . .. Le autofunzioni formano una base ortonormale <strong>di</strong> L 2 (0, L).e. Con<strong>di</strong>zioni perio<strong>di</strong>che. Le soluzioni non banali sono quelle perio<strong>di</strong>che.Dunque abbiamo la base ortonormale <strong>di</strong> autofunzioni (con corrispondentiautovalori)⎧ϕ 0 (x) = √ 1 , λ 0 = 0,L ⎪⎨√ ( ) ( ) 2 2 2nπx2nπϕ c n(x) =L cos , λ n = , (I.22)L(L2nπ⎪⎩ ϕ s n(x) =√2L sin ( 2nπxL), λ n =dove n = 1, 2, 3, . . .. Quin<strong>di</strong> l’autovalori zero è semplice mentre gli altriautovalori hanno moltiplicità 2.f. Con<strong>di</strong>zione <strong>di</strong> Dirichlet in x = 0 e mista in x = L. Per trovareuna soluzione non banale del problema al contorno supponiamo che k ≥ 0.Utilizzando la con<strong>di</strong>zione u(0) = 0 si ottieneu(x) ∼ sin(kx).L) 2,L’altra con<strong>di</strong>zione (cos α)u(L) + (sin α)u ′ (L) = 0 conduce alla con<strong>di</strong>zionecos α sin(kL) + k sin α cos(kL) = 0, n = 1, 2, 3, . . . .Escludendo i casi già trattati, cioè α = 0 [Dirichlet] e α = (π/2) [Dirichlet inx = 0 e Neumann in x = L], risultano k > 0, sin(kL) = 0 e cos(kL) ≠ 0.Arriviamo all’equazione transcedentaletan(kL) = −k tan α,(I.23)11
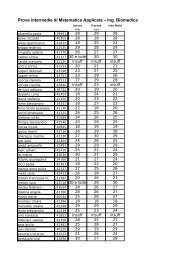
543210−1−2−3−4−50 0.5 1 1.5 2 2.5 3kFigura I.1: Il plot contiene i grafici delle funzioni y = tan(xL) e y = −k tan αper L = 5 e α = π . Gli autovalori sono i valori <strong>di</strong> k > 03corrispondenti ai loro punti <strong>di</strong> intersezione.dove tan α > 0. Cercando i punti <strong>di</strong> intersezione positivi tra il grafico dellafunzione k ↦→ tan(kL) e la retta k ↦→ −k tan α con coefficiente angolare negativo,troviamo una successione infinita <strong>di</strong> autovalori λ n = k 2 n (n = 1, 2, 3, . . .).Le corrispondenti autofunzioni si possono normalizzare in L 2 (0, L), risultandoin una base ortonormale <strong>di</strong> L 2 (0, L).g. Con<strong>di</strong>zioni Miste Diverse. Ci limitiamo al caso in cui α, β ∈ (0, π ). In2tal caso la soluzioneu(x) ∼ c 1 cos(kx) + c 2sin(kx)kper le opportune costanti c 1 , c 2 e per k > 0 sod<strong>di</strong>sfa alle due con<strong>di</strong>zionic 1 cos β − c 2 sin β = 0,(I.24)[c 1 [cos α cos(kL) − k sin α sin(kL)] + c 2 cos α sin(kL)]+ sin α cos(kL) = 0.k(I.25)L’esistenza <strong>di</strong> una soluzione non banale conduce alla con<strong>di</strong>zione[cos β cos α sin(kL)]+ sin α cos(kL)k+ sin β [cos α cos(kL) − k sin α sin(kL)] = 0,12
oppure[ cos α cos βsin(α + β) cos(kL) = −k]− k sin α sin β sin(kL).Si cerchino i punti <strong>di</strong> intersezione positivi tra il grafico della funzione k ↦→tan(kL) e quello della funzione razionalek sin(α + β)k ↦→ −cos α cos β − k 2 sin α sin β .3.2 Equazione <strong>di</strong> Helmholtz nel RettangoloConsideriamo ora l’equazione <strong>di</strong> Helmholtz∂ 2 u∂x + ∂2 u2 ∂y + 2 k2 u(x, y) = 0,(I.26)dove 0 < x < L 1 , 0 < y < L 2 e vengono imposte le seguenti con<strong>di</strong>zioni <strong>di</strong>Dirichlet:u(x, y) = 0, x = 0, L 1 oppure y = 0, L 2 . (I.27)Separando le variabili, cioè ponendou(x, y) = X(x)Y (y),e <strong>di</strong>videndo la (I.26) da X(x)Y (y) otteniamoX ′′ (x)X(x) + Y ′′ (y)Y (y) + k2 = 0.Quin<strong>di</strong> esistono costanti k 2 x e k 2 y tali che{X ′′ (x) + k 2 xX(x) = 0,X(0) = X(L 1 ) = 0,{Y ′′ (y) + kyY 2 (y) = 0,Y (0) = Y (L 2 ) = 0,k 2 x + k 2 y = k 2 .(I.28)(I.29)(I.30)Quin<strong>di</strong> i problemi al contorno nelle variabili x e y sono ambedue problemi alcontorno per l’equazione <strong>di</strong> Helmholtz in una variabile con le con<strong>di</strong>zioni <strong>di</strong>Dirichlet. Quin<strong>di</strong> i loro autovalori e le loro autofunzioni normalizzate sono(k 2 x) n =( nπL 1) 2, ϕ n (x) =13√2L 1sin( nπxL 1), (I.31)
dove n = 1, 2, 3, . . ., e(k 2 y) m =( ) 2√ ( )mπ2 mπy, ϕ m (y) = sin , (I.32)L 2 L 2 L 2dove m = 1, 2, 3, . . .. Di conseguenza, gli autovalori e autofunzioni normalizzatedel problema bi<strong>di</strong>mensionale sono( )( ) ( )n(k 2 ) n,m = π 2 2+ m22 nπx mπy, ϕL 2 1 L 2 n,m (x, y) = √ sin sin ,2L1 L 2 L 1 L 2(I.33)dove n, m = 1, 2, 3, . . .. Le autofunzioni formano una base ortonormale inL 2 ((0, L 1 ) × (0, L 2 )).Su tutte le 4 parti del bordo, {0} × [0, L 2 ], {L 1 } × [0, L 2 ], [0, L 1 ] × {0}e [0, L 1 ] × {L 2 }, si possono imporre <strong>di</strong>verse con<strong>di</strong>zioni al contorno, quali lecon<strong>di</strong>zioni <strong>di</strong> Dirichlet, quelle <strong>di</strong> Neumann e quelle miste. In tutti questi casi sipossono separare le variabili e risolvere i problemi al contorno uni<strong>di</strong>mensionaliche ne risultano.L’equazione <strong>di</strong> Helmholtz si può risolvere per separazione delle variabilianche nei parallelopepi<strong>di</strong> multi<strong>di</strong>mensionali in <strong>di</strong>mensione ≥ 3. Per esempio,in tre <strong>di</strong>mensioni, nel dominio (0, L 1 ) × (0, L 2 ) × (0, L 3 ), e sotto le con<strong>di</strong>zioni<strong>di</strong> Dirichlet escono gli autovalori e autofunzioni(k 2 ) n,m,l = π 2 ( n2L 2 1+ m2L 2 2ϕ n,m,l (x, y, z) = 2√ 2√L1 L 2 L 3sindove n, m, l = 1, 2, 3, . . ..+ l2L 2 3),( nπxL 1)sin( ) ( )mπy lπzsin ,L 2 L 34 Equazioni delle onde e del caloreDiscutiamo ora alcuni casi in cui è abbastanza facile calcolare esplicitamentele soluzioni delle equazioni del calore e delle onde.4.1 Equazioni delle onde e del calore nell’intervalloConsideriamo ora l’equazione del calore per x ∈ (0, L) con con<strong>di</strong>zione iniziale∂u∂t = ∂2 ua2∂x , 2u(x, 0) = u 0 (x),(I.34)(I.35)14
dove a 2 è la <strong>di</strong>ffusività termica, 2 e quella delle onde con con<strong>di</strong>zioni iniziali∂ 2 u∂t = 1 ∂ 2 u2 c 2 ∂x , 2u(x, 0) = u 0 (x),∂u∂t (x, 0) = u 1(x),(I.36)(I.37)(I.38)dove c > 0 è la velocità d’onda. In ambedue casi imporremo una con<strong>di</strong>zioneal contorno, quali quella <strong>di</strong> Dirichletu(0, t) = u(L, t) = 0.(I.39)Al posto delle con<strong>di</strong>zioni <strong>di</strong> Dirichlet si possono imporre quelle <strong>di</strong> Neumann∂u ∂u(0, t) = (L, t) = 0.∂x ∂x (I.40)In ambedue i casi facciamo una separazione delle variabili <strong>di</strong> tipou(x, t) = X(x)T (t)e <strong>di</strong>vi<strong>di</strong>amo la (I.34) e la (I.37) da X(x)T (t). Otteniamo⎧1 T⎪⎨(t)a 2 T (t) = X′′ (x)X(x) , equazione del calore,⎪⎩ c 2 T ′′ (t)T (t) = X′′ (x)X(x) , equazione delle onde,con le con<strong>di</strong>zioni <strong>di</strong> DirichletX(0) = X(L) = 0.La separazione delle variabili conduce al problema <strong>di</strong> contorno{X ′′ (x) + k 2 X(x) = 0,X(0) = X(L) = 0,(I.41)più il problema in variabile temporale⎧⎨T ′ (t) = −a 2 k 2 T (t), equazione del calore,⎩T ′′ (t) = k2c T (t), equazione delle onde. (I.42)22 Infatti a 2 = K/(µρ), dove K è la conduttività termica, µ è il calore specifico e ρ è ladensità del mezzo. In generale vale l’equazione µρ(∂u/∂t) = K∆u + ∇ ⃗ K · ∇u.15
Quin<strong>di</strong> la solzione della (I.41) ha la forma( nπ(k 2 ) n =L) 2 ( nπx), X(x) ∼ sin , (I.43)Ldove n = 1, 2, 3, . . ., mentre la soluzione dei problemi temporali ha la forma⎧( ( nπ) ) 2T (t) = T (0) exp −a⎪⎨2 t , equazione del calore,L ( ) nπt( )(I.44)sinnπt⎪⎩ T (t) = T (0) cos + T ′ cL(0)cLnπt/cL , equazione delle onde.La soluzione generale della equazione del calore o delle onde è una combinazionelineare (facendo scorrere n = 1, 2, 3, . . .) delle soluzioni elementariX n (x)T n (t). Quin<strong>di</strong> la soluzione generale dell’equazione del calore ha la formadoveu(x, t) =∞∑n=1( ( nπ) ) 2 ( nπx)c n exp −a 2 t sin , (I.45)L Lu 0 (x) = u(x, 0) =∞∑ ( nπx)c n sin . (I.46)Ln=1Il coefficiente <strong>di</strong> Fourier c n viene calcolato nel seguente modo:c n = 2 L∫ L0u 0 (x) sin( nπx)dx.LD’altra parte, la soluzione generale dell’equazione delle onde ha la forma⎡( ) ⎤ nπt∞∑( ) sinu(x, t) = ⎢ nπt⎣ c cL(n cos + d n⎥ nπx)cL nπt/cL ⎦ sin , (I.47)Ln=1doveu 0 (x) = u(x, 0) =∞∑ ( nπx)c n sin , (I.48)Ln=1u 1 (x) = ∂u∂t (x, 0) = ∞∑n=1d n sin( nπx). (I.49)L16
I coefficienti <strong>di</strong> Fourier si calcolano nel seguente modo:c n = 2 Ld n = 2 L∫ L0∫ L0( nπxu 0 (x) sinL( nπxu 1 (x) sinL)dx,)dx.Se invece della (I.39) vengono imposte le con<strong>di</strong>zioni <strong>di</strong> Neumann, i dettaglidella derivazione della soluzione non cambiano molto.4.2 Equazioni delle onde e del calore nel rettangoloLa risoluzione delle equazioni del calore e delle onde nel rettangolo è analoga aquella per i corrispondenti problemi uni<strong>di</strong>mensionali. Al posto degli autovalorie autofunzioni dell’equazione <strong>di</strong> Helmholtz nell’intervallo si utilizzano ora quellidell’equazione <strong>di</strong> Helmholtz nel rettangolo.Consideriamo ora l’equazione del calore per (x, y) ∈ (0, L 1 ) × (0, L 2 ) concon<strong>di</strong>zione iniziale[ ]∂u ∂ 2∂t = ua2∂x + ∂2 u, (I.50)2 ∂y 2u(x, y, 0) = u 0 (x, y),dove a 2 è la <strong>di</strong>ffusività termica, e quella delle onde con con<strong>di</strong>zione iniziali∂ 2 u∂t 2u(x, y, 0) = u 0 (x, y),∂u∂t (x, y, 0) = u 1(x, y),(I.51)= 1 [ ]∂ 2 uc 2 ∂x + ∂2 u, (I.52)2 ∂y 2(I.53)(I.54)dove c > 0 è la velocità d’onda. In ambedue casi imporremo una con<strong>di</strong>zioni alcontorno, quali quella <strong>di</strong> DirichletLa separazione delle variabili{u(0, y, t) = u(L 1 , y, t) = 0, y ∈ [0, L 2 ],u(x, 0, t) = u(x, L 2 , t) = 0, x ∈ [0, L 1 ].u(x, y, t) = X(x)Y (y)T (t)17(I.55)
e la <strong>di</strong>visione dall’espressione X(x)Y (y)T (t) conducono al problema al contorno[T⎧⎪ ′ (t) X ′′⎨ T (t) = (x)a2X(x) + Y ]′′ (y),Y (y)(I.56)X(0) = X(L 1 ) = 0,⎪ ⎩Y (0) = Y (L 2 ) = 0,per l’equazione del calore e al problema al contorno⎧T ′′ (t)⎪⎨ T (t) = 1 [ X ′′ (x)c 2 X(x) + Y ]′′ (y),Y (y)X(0) = X(L 1 ) = 0,⎪⎩Y (0) = Y (L 2 ) = 0,per l’equazione delle onde. Otteniamo, come al solito,e dunqueX ′′ (x) + k 2 xX(x) = 0, X(0) = X(L 1 ) = 0,Y ′′ (y) + k 2 yY (y) = 0, Y (0) = Y (L 2 ) = 0,(I.57)( ) 2 nπ(k x ) 2 = ,L 1( ) 2 mπ(k y ) 2 = ,L 2X(x) ∼ sin nπxL 1,Y (y) ∼ sin mπyL 2,dove n, m = 1, 2, 3, . . .. Inoltre,T (t) = T (0) exp(−a 2 [ (nπL 1) 2+per l’equazione del calore e⎛ [ (nπT (t) = T (0) cos ⎝ t ) 2+c L 1⎛ [ (nπsin ⎝ t ) 2+c L 1+ T ′ (0)( mπL 2) 2])( ) ] ⎞21/2mπ⎠L 2( ) ] ⎞21/2mπ⎠L 2[ (nπ ) 2 ( ) ] 2 1/21mπ+c L 1 L 218
per l’equazione delle onde.Per l’equazione del calore arriviamo alla seguente soluzione completa:( [∞∑(nπ ) 2 ( ) ]) 2 mπu(x, y, t) = c n,m exp −a +sin nπx sin mπy ,L 1 L 2 L 1 L 2doven,m=1u 0 (x, y) =∞∑n,m=1c n,m = 4L 1 L 2∫ L1c n,m sin nπx0∫ L20L 1(I.58)sin mπyL 2, (I.59)u 0 (x, y) sin nπxL 1Infine l’equazione delle onde ha la seguente soluzione:⎡ ⎛ [∞∑(nπu(x, y, t) = ⎣c n,m cos ⎝ t ) 2+c Ln,m=11⎛ [ (nπsin ⎝ t ) 2 ( ) ] ⎞21/2mπ+⎠c L 1 L 2+ d n,m [ (nπ ) 2 ( ) ] 2 1/21mπ+c L 1 L 2sin mπyL 2dy dx. (I.60)( ) ] ⎞21/2mπ⎠ sin nπx sin mπyL 2 L 1 L 2⎤sin nπxL 1sin mπyL 2, (I.61)⎥⎦doveu 0 (x, y) =u 1 (x, y) =∞∑n,m=1∞∑n,m=1c n,m = 4L 1 L 2∫ L1d n,m = 4L 1 L 2∫ L1c n,m sin nπxL 1d n,m sin nπx00∫ L20∫ L20L 1sin mπyL 2, (I.62)sin mπyL 2, (I.63)u 0 (x, y) sin nπxL 1u 1 (x, y) sin nπxL 1sin mπyL 2dy dx, (I.64)sin mπyL 2dy dx. (I.65)19
Capitolo IIANALISI FUNZIONALEIn questo capitolo si introducono gli spazi <strong>di</strong> Banach e <strong>di</strong> Hilbert, gli operatorilineari e loro spettro. Inoltre si <strong>di</strong>scutono gli operatori compatti su uno spazio<strong>di</strong> Hilbert.1 Spazi <strong>di</strong> BanachConsideriamo noto il concetto <strong>di</strong> spazio vettoriale X rispetto ad un campo<strong>di</strong> scalari F che supponiamo uguale a R (numeri reali) oppure a C (numericomplessi). Quin<strong>di</strong> in X sono state definite l’ad<strong>di</strong>zione X × X ↦→ X e lamoltiplicazione scalare F × X ↦→ X con le solite proprietà aritmetiche.Uno spazio normato X è uno spazio vettoriale su cui è definita una norma‖ · ‖ : X → R con le seguenti proprietà:a. ‖ϕ‖ ≥ 0 per ogni ϕ ∈ X; (positività)b. ‖ϕ‖ = 0 se e solo se ϕ = 0; (definitezza)c. ‖αϕ‖ = |α| ‖ϕ‖ per α ∈ F e ϕ ∈ X; (omogeneità)d. ‖ϕ + ψ‖ ≤ ‖ϕ‖ + ‖ψ‖ per ϕ, ψ ∈ X. (<strong>di</strong>suguaglianza triangolare)Dalle (c)-(d) segue subito chee. |‖ϕ‖ − ‖ψ‖| ≤ ‖ϕ − ψ‖ per ϕ, ψ ∈ X.Per <strong>di</strong>stanza tra ϕ e ψ si intende la ‖ϕ − ψ‖.Una successione {ϕ n ‖ ∞ n=1 <strong>di</strong> elementi <strong>di</strong> X è detta convergente al vettoreϕ ∈ X se lim n→∞ ‖ϕ n − ϕ‖ = 0, ossia se, per ogni ε > 0, esiste un intero n(ε)tale che ‖ϕ n − ϕ‖ < ε per ogni n > n(ε).Una successione {ϕ n } ∞ n=1 <strong>di</strong> elementi <strong>di</strong> uno spazio normato X si <strong>di</strong>ce successione<strong>di</strong> Cauchy se per ogni ε > 0 esiste un intero n(ε) tale che ‖ϕ n −ϕ m ‖ < ε21
per n, m > n(ε), ossia se lim n,m→∞ ‖ϕ n − ϕ m ‖ = 0. La norma in X si <strong>di</strong>cecompleta se ogni successione <strong>di</strong> Cauchy in X è convergente in X. Uno spazionormato con norma completa si <strong>di</strong>ce spazio <strong>di</strong> Banach.Siano X e Y due spazi normati, U ⊂ X e f : U → Y . Allora f si <strong>di</strong>cecontinua in ψ ∈ U se {f(ϕ n )} ∞ n=1 converge a f(ϕ) in Y per ogni successione{ϕ n } ∞ n=1 in U che converge a ϕ. La funzione f si <strong>di</strong>ce continua se è continuain ogni punto ϕ ∈ U.Discutiamo ora alcuni esempi <strong>di</strong> spazi <strong>di</strong> Banach, trascurando la <strong>di</strong>mostrazionedella completezza della norma.1. Per ogni sottoinsieme chiuso e limitato Ω <strong>di</strong> R n , sia C(Ω) lo spazio vettoriale<strong>di</strong> tutte le funzioni scalari (reali o complesse) continue in Ω. Allorala funzione ‖ · ‖ ∞ : Ω → R,‖f‖ ∞ = maxz∈Ω|f(x)|,introduce una norma completa in C(Ω). Si verifica che ‖f n − f‖ ∞ → 0se e solo se f n (x) → f(x) uniformemente in x ∈ Ω.2. Sia Ω un sottoinsieme misurabile in R n . Con L 2 (Ω) si in<strong>di</strong>ca lo spaziovettoriale <strong>di</strong> tutte le funzioni al quadrato sommabili (nel senso <strong>di</strong> Lebesgue)in Ω, dove due funzioni per cui i valori sono <strong>di</strong>versi soltanto inun sottoinsieme <strong>di</strong> Ω <strong>di</strong> misura zero, vengono considerate uguali. Allorala funzione ‖ · ‖ 2 : L 2 (Ω) → R,è una norma completa in L 2 (Ω).(∫1/2‖f‖ 2 = |f(x)| dx) 2 ,Ω3. Sia l 2 lo spazio vettoriale <strong>di</strong> tutte le successioni {x n } ∞ n=1 scalari (reali ocomplesse) per cui la serie ∑ ∞n=1 |x n| 2 è convergente. Allora la funzione‖ · ‖ 2 : l 2 → R,( ∞) 1/2∑‖{x n } ∞ n=1‖ 2= |x n | 2 ,è una norma completa in l 2 .4. Sia Ω un sottoinsieme misurabile in R n . Con L 1 (Ω) si in<strong>di</strong>ca lo spaziovettoriale <strong>di</strong> tutte le funzioni sommabili (nel senso <strong>di</strong> Lebesgue) in Ω,dove due funzioni per cui i valori sono <strong>di</strong>versi soltanto in un sottoinsieme22n=1
<strong>di</strong> Ω <strong>di</strong> misura zero, vengono considerate uguali. Allora la funzione ‖·‖ 1 :L 1 (Ω) → R,∫‖f‖ 1 = |f(x)| dx,è una norma completa in L 1 (Ω).Per un elemento ϕ <strong>di</strong> uno spazio normato X e r > 0, l’insiemeB(ϕ; r) = {ψ ∈ X : ‖ϕ − ψ‖ < r}è definito la sfera aperta <strong>di</strong> raggio r e centro ϕ. Un sottoinsieme U si <strong>di</strong>ceaperto se per ogni ϕ ∈ X esiste r > 0 (che <strong>di</strong>pende da ϕ) tale che B(ϕ; r) ⊂ U.Dato il sottoinsieme U <strong>di</strong> X, la parte interna U 0 <strong>di</strong> U è l’insieme aperto piùgrande <strong>di</strong> X contenuto in U.Un sottoinsieme U <strong>di</strong> X si <strong>di</strong>ce chiuso se esso contiene tutti i limiti <strong>di</strong> tuttele successioni con termini in U e limiti in X. Dato il sottoinsieme U <strong>di</strong> X, lasua chiusura U è il sottoinsieme chiuso più piccolo <strong>di</strong> X che contiene U.Dato il sottoinsieme U <strong>di</strong> X, la frontiera ∂U <strong>di</strong> U è l’insieme dei punti <strong>di</strong> Xche possono essere il limite sia <strong>di</strong> una successione in U sia <strong>di</strong> una successionein X \ U. Si <strong>di</strong>mostra facilmente cheΩ∂U = U ∩ (X \ U).Un sottoinsieme U <strong>di</strong> X si <strong>di</strong>ce limitato se il <strong>di</strong>ametro<strong>di</strong>am(U) = sup{‖ϕ − ψ‖ : ϕ, ψ ∈ X}è finito. In tal caso esiste r > 0 (con r > 1 <strong>di</strong>am(U)) tale che U ⊂ B(ϕ; r) per2ogni vettore ϕ ∈ X.Un sottoinsieme D <strong>di</strong> X si <strong>di</strong>ce denso in X se ogni vettore ϕ ∈ X è il limite<strong>di</strong> una successione con termini in D. Uno spazio <strong>di</strong> Banach si <strong>di</strong>ce separabilese ha un sottoinsieme denso finito o infinito numerabile.2 Spazi <strong>di</strong> HilbertSia X uno spazio vettoriale reale o complesso (cioè, F = R oppure F = C).Allora una funzione (·, ·) : X × X → F che sod<strong>di</strong>sfa le seguenti proprietà:a. (ϕ, ϕ) ≥ 0, (positività)b. (ϕ, ϕ) = 0 se e solo se ϕ = 0, (definitezza)c. (ϕ, ψ) = (ψ, ϕ) per ogni ϕ, ψ ∈ X, (simmetria)23
d. (αϕ + βψ, χ) = α(ϕ, χ) + β(ψ, χ) per α, β ∈ F e ϕ, ψ, χ ∈ X, (linearità)è definita prodotto scalare (oppure prodotto interna, oppure, nel caso F = C,prodotto sesquilineare). Nella (c) il soprasegno in<strong>di</strong>ca il coniugato complessose F = C. Dalle (c)-(d) segue subito chee. (χ, αϕ + βψ) = α(χ, ϕ) + β(χ, ψ) per α, β ∈ F e ϕ, ψ, χ ∈ X.Ogni prodotto scalare induce la cosiddetta norma indotta‖ϕ‖ = √ (ϕ, ϕ).Inoltre vale la <strong>di</strong>suguaglianza <strong>di</strong> Schwartz 1|(ϕ, ψ)| ≤ ‖ϕ‖ ‖ψ‖ per ϕ, ψ ∈ X,che è un’uguaglianza se e solo se ϕ e ψ sono proporzionali. La <strong>di</strong>suguaglianza<strong>di</strong> Schwartz implica la <strong>di</strong>suguaglianza triangolare 2‖ϕ + ψ‖ ≤ ‖ϕ‖ + ‖ψ‖, ϕ, ψ ∈ X.Uno spazio vettoriale con prodotto scalare si chiama spazio pre-Hilbert.Uno spazio pre-Hilbert con norma indotta completa si <strong>di</strong>ce spazio <strong>di</strong> Hilbert.Uno spazio <strong>di</strong> Hilbert sod<strong>di</strong>sfa all’identità del parallelogramma‖ϕ + ψ‖ 2 + ‖ϕ − ψ‖ 2 = 2 ( ‖ϕ‖ 2 + ‖ψ‖ 2) .Vice versa, se la norma <strong>di</strong> uno spazio <strong>di</strong> Banach sod<strong>di</strong>sfa all’identità delparallologramma, essa è la norma indotta <strong>di</strong> uno spazio <strong>di</strong> Hilbert.Il prodotto scalare può essere espresso nella norma tramite la cosiddettaformula <strong>di</strong> polarizzazione:{14(ϕ, ψ) =(‖ϕ + ψ‖2 − ‖ϕ − ψ‖ 2 ), F = R,1(‖ϕ + 4 ψ‖2 − ‖ϕ − ψ‖ 2 + i‖ϕ + iψ‖ 2 − i‖ϕ − iψ‖ 2 ), F = C.(II.1)Discutiamo ora alcuni esempi <strong>di</strong> spazi <strong>di</strong> Hilbert.1 Dim: Sia ξ un numero complesso <strong>di</strong> modulo 1 tale che ξ(ϕ, ψ) = |(ϕ, ψ)| e sia χ = ξψ.In tal caso ‖χ‖ = ‖ψ‖, mentre per ogni t ∈ R si ha 0 ≤ ‖ϕ + tχ‖ 2 = ‖ϕ‖ 2 + 2t(ϕ, χ) +t 2 ‖χ‖ 2 . Quin<strong>di</strong> il <strong>di</strong>scriminante <strong>di</strong> questo polinomio reale quadrato è non positivo. Dunque4|(ϕ, χ)| 2 − 4‖ϕ‖ 2 ‖χ‖ 2 ≤ 0 e quin<strong>di</strong> |(ϕ, ψ)| ≤ ‖ϕ‖ ‖ψ‖.2 Dim: ‖ϕ + ψ‖ 2 = ‖ϕ‖ 2 + ‖ψ‖ 2 + 2Re(ϕ, ψ) ≤ ‖ϕ‖ 2 + ‖ψ‖ 2 + 2‖ϕ‖ ‖ψ‖ = (‖ϕ‖ + ‖ψ‖) 2 .24
1. Sia Ω un sottoinsieme misurabile in R n . Con L 2 (Ω) si in<strong>di</strong>ca lo spaziovettoriale <strong>di</strong> tutte le funzioni al quadrato sommabili (nel senso <strong>di</strong> Lebesgue)in Ω, dove due funzioni per cui i valori sono <strong>di</strong>versi soltanto inun sottoinsieme <strong>di</strong> Ω <strong>di</strong> misura zero, vengono considerate uguali. Allorala funzione (·, ·) : L 2 (Ω) × L 2 (Ω) → C,(∫1/2(f, g) = f(x)g(x) dx),Ωè un prodotto scalare in L 2 (Ω) che induce la solita norma.2. Sia l 2 lo spazio vettoriale <strong>di</strong> tutte le successioni {x n } ∞ n=1 scalari (reali ocomplesse) per cui la serie ∑ ∞n=1 |x n| 2 è convergente. Allora la funzione(·, ·) : l 2 × l 2 → C,( ∞) 1/2∑({x n } ∞ n=1, {y n } ∞ n=1) = x n y n ,n=1è un prodotto scalare in l 2 che induce la solita norma.3 Basi ortonormali in spazi <strong>di</strong> HilbertConsideriamo prima uno spazio vettoriale <strong>di</strong> <strong>di</strong>mensione N con prodotto scalare.Tale spazio ha una base ortonormale {ϕ n } N n=1 <strong>di</strong> vettori <strong>di</strong> lunghezza 1ortogonali tra loro. Partendo da una base (i.e., un sistema linearmente in<strong>di</strong>pendentemassimale) {ψ n } N n=1 qualsiasi, si può costruire una base ortonormaleutilizzando il processo <strong>di</strong> Gram-Schmidt:⎧ϕ 1 = ψ 1‖ψ 1 ‖ϕ 2 = ψ 2 − (ψ 2 , ϕ 1 )ϕ 1⎪⎨ ‖ψ 2 − (ψ 2 , ϕ 1 )ϕ 1 ‖ϕ 3 = ψ 3 − (ψ 3 , ϕ 1 )ϕ 1 − (ψ 3 , ϕ 2 )ϕ 2‖ψ 3 − (ψ 3 , ϕ 1 )ϕ 1 − (ψ 3 , ϕ 2 )ϕ 2 ‖.⎪⎩ ϕ N =ψ N − (ψ N , ϕ 1 )ϕ 1 − . . . − (ψ N , ϕ N−1 )ϕ N−1‖ψ N − (ψ N , ϕ 1 )ϕ 1 − . . . − (ψ N , ϕ N−1 )ϕ N−1 ‖ .È facile controllare induttivamente che ϕ j è ortogonale ai vettori ϕ 1 , . . . , ϕ j−1e ha norma 1 (j = 1, 2, . . . , N).25
Appena trovata una base ortonormale {ϕ n } N n=1, si ottengono subito lecosiddette identità <strong>di</strong> Parseval:‖ϕ‖ 2 =(ϕ, ψ) =N∑|(ϕ, ϕ n )| 2 ,n=1N∑(ϕ, ϕ n )(ϕ n , ψ).n=1Consideriamo ora uno spazio <strong>di</strong> Hilbert separabile X a <strong>di</strong>mensione infinita.Estraendo da un sottoinsieme denso e infinito numerabile D un sistema<strong>di</strong> vettori linearmente in<strong>di</strong>pendente massimale e applicando il processo <strong>di</strong>Gram-Schmidt senza fermarsi ad un in<strong>di</strong>ce superiore N, si ottiene una baseortonormale e infinita numerabile {ϕ n } ∞ n=1. D’altra parte, l’insieme <strong>di</strong> tuttele combinazioni lineari dei vettori <strong>di</strong> una base ortonormale infinita numerabile<strong>di</strong> X è denso in X. Conclu<strong>di</strong>amo dunque che uno spazio <strong>di</strong> Hilbert separabile a<strong>di</strong>mensione infinita viene caratterizzato dall’esistenza <strong>di</strong> una base ortonormaleinfinita numerabile.Data una base ortonormale {ϕ n } ∞ n=1 in X, risultano le identità <strong>di</strong> Parseval:‖ϕ‖ 2 =(ϕ, ψ) =∞∑|(ϕ, ϕ n )| 2 ,n=1∞∑(ϕ, ϕ n )(ϕ n , ψ).n=1Inoltre, vale lo sviluppo∞∑ϕ = (ϕ, ϕ n )ϕ nn=1nel senso chelimN→∞∥ N ∥ ϕ − ∑ ∥∥∥∥(ϕ, ϕ n )ϕ n = 0.n=1Introducendo la successione crescente <strong>di</strong> sottospaziE N = span{ϕ 1 , . . . , ϕ N }<strong>di</strong> <strong>di</strong>mensione N, si può leggere quest’ultima relazione limite nella seguentemaniera: La <strong>di</strong>stanza (ortogonale) tra ϕ e il sottospazio E N tende a zero se26
N → ∞. 3 Quin<strong>di</strong>ϕ ↦→N∑(ϕ, λ n )λ nn=1definisce la proiezione ortogonale <strong>di</strong> ϕ in E N .Dato lo spazio <strong>di</strong> Hilbert separabile X con base ortonormale {ϕ n } ∞ n=1, sidefinisce la trasformazione lineare U : X → l 2 daUϕ = {(ϕ, ϕ n )} ∞ n=1 ,ossia Uϕ è la successione dei coefficienti (ϕ, ϕ n ) vista come vettore in l 2 . Allora,applicando la definizione della norma in l 2 ,‖Uϕ‖ 2 =∞∑|(ϕ, ϕ n )| 2 = ‖ϕ‖ 2 ,n=1secondo l’identità <strong>di</strong> Parseval. Si verifica facilmente che U definisce una corrispondenzabiunivoca tra X e l 2 . Costruendo la U per X = l 2 e la sua baseortonormale canonica, si vede subito che U coincide con la trasformazione identitàin l 2 . Conclu<strong>di</strong>amo che, tranne per una trasformazione unitaria della baseortonormale, esiste un singolo spazio <strong>di</strong> Hilbert separabile.4 Applicazioni1. In X = L 2 (−π, π) le funzioniϕ n (x) = 1 √2πe inx , n ∈ Z,formano una base ortonormale. Data una funzione f ∈ L 2 (−π, π) e introducendoi suoi coefficienti <strong>di</strong> Fourierc n = 12π∫ π−πf(x)e −inx dx,si vede subito che c n = (2π) 1/2 (ϕ, ϕ n ) per n ∈ Z. Secondo l’identità <strong>di</strong> Parsevalsegue∞∑‖f‖ 2 2 = 2π |c n | 2 ,n=−∞3 Sia ∑ Nn=1 λ ∥nϕ n un vettore arbitrario in E N e F (λ 1 , . . . , λ N ) = ∥ϕ − ∑ ∥N ∥∥n=1 λ 2nϕ nla <strong>di</strong>stanza tra ϕ e E N al quadrato. Si può <strong>di</strong>mostrare che il minimo viene assunto perλ n = (ϕ, ϕ n ) (n = 1, . . . , N).27
ossia∫1 π|f(x)| 2 dx =2π −π∞∑n=−∞|c n | 2 .Inoltre, vale la convergenza della sua serie <strong>di</strong> Fourierf(x) =∞∑n=−∞c n e inxnel senso che∫ πlimN→∞−π∣ N ∣ f(x) − ∑ ∣∣∣∣2c n e inx dx = 0.n=12. In X = L 2 (−π, π) le funzioniϕ 0 (x) = 1 √2π,ϕ c n(x) = cos(nx) √ π, ϕ s n(x) = sin(nx) √ π, n = 1, 2, 3, . . . ,formano una base ortonormale. Data una funzione f ∈ L 2 (−π, π) e introducendoi suoi coefficienti <strong>di</strong> Fourier⎧⎪⎨ a n = 1 ∫ πf(x) cos(nx) dx, n = 0, 1, 2, . . . ,−ππ⎪⎩ b n = 1 π∫ π−πf(x) sin(nx) dx, n = 1, 2, 3, . . . ,si applichi l’identità <strong>di</strong> Parseval per trovare l’uguaglianza∫1 π|f(x)| 2 dx = |a 0| 2+π −π2∞∑ (|an | 2 + |b n | 2) .n=1Inoltre, vale la convergenza della sua serie <strong>di</strong> Fouriernel senso che∫ πlimN→∞−πf(x) = a 02 + ∞∑n=1(a n cos(nx) + b n sin(nx))∣ f(x) − a N02 − ∑(a n cos(nx) + b n sin(nx))∣n=1282dx = 0.
5 Operatori lineariSiano X e Y due spazi <strong>di</strong> Banach. Un’applicazione T : X → Y si <strong>di</strong>ce operatorelineare seT (λ 1 x 1 + λ 2 x 2 ) = λ 1 T (x 1 ) + λ 2 T (x 2 ), x 1 , x 2 ∈ X, λ 1 , λ 2 ∈ F,dove F = R oppure F = C. Molto spesso scriviamo T x invece <strong>di</strong> T (x). Gliesempi principali degli operatori lineari sono le matrici n×m (come rappresentazionidegli operatori lineari da F m in F n ) e gli operatori <strong>di</strong>fferenziali lineari.L’immagine <strong>di</strong> tale T è l’insieme Im (T ) = {T x : x ∈ X}; quest’insieme è unsottospazio lineare <strong>di</strong> Y . Il kernel <strong>di</strong> T è il sottospazio lineare <strong>di</strong> X definito daKer T = {x ∈ X : T x = 0}.5.1 Proprietà generaliUn operatore lineare T : X → Y si <strong>di</strong>ce invertibile se è una corrispondenzabiunivoca tra X e Y . Un operatore lineare T : X → Y è invertibile se e solose Im T = Y e Ker T = {0}.Siano X e Y spazi <strong>di</strong> Banach. Un operatore lineare T : X → Y si <strong>di</strong>celimitato se sup ‖T x‖ < +∞. In tal caso il numero‖x‖=1‖T ‖ =sup ‖T x‖ = supx∈X, ‖x‖=10≠x∈X‖T x‖‖x‖si <strong>di</strong>ce norma <strong>di</strong> T . Se X = F n (dove F = R oppure F = C) ha <strong>di</strong>mensionefinita, ogni operatore lineare T : X → Y è limitato.a. Sia {e 1 , · · · , e n } la base canonica <strong>di</strong> F n . Allora ogni operatore limitatoT : F n → Y può essere rappresentato comeT( n∑i=1x i e i)=n∑x i T e i .i=1Se si applica ad una matrice, la norma si chiama norma spettrale. 4Utilizzando questa rappresentazione, si <strong>di</strong>mostri la limitatezza <strong>di</strong> T .b. Siano X, Y, Z tre spazi <strong>di</strong> Banach e siano T : X → Y e S : Y → Z dueoperatori lineari limitati. Allora ST : X → Z è un operatore linearelimitato e ‖ST ‖ ≤ ‖S‖‖T ‖.4 La norma spettrale <strong>di</strong> una matrice è uguale al suo numero singolare più grande.29
Proposizione II.3 Siano X, Y spazi <strong>di</strong> Banach e sia T : X → Y un operatorelineare. Le seguenti affermazioni sono equivalenti:a. T è un operatore limitato.b. T : X → Y è una funzione uniformemente continua.c. T : X → Y è una funzione continua.d. T : X → Y è continua in 0.Dimostrazione. [(a)=⇒(b)] Per x 1 , x 2 ∈ X si ha grazie alla limitatezza <strong>di</strong>T : ‖T x 1 − T x 2 ‖ ≤ ‖T ‖‖x 1 − x 2 ‖. Quin<strong>di</strong>, se ‖x 1 − x 2 ‖ < (ε/‖T ‖), allora‖T x 1 − T x 2 ‖ < ε. Allora T è uniformemente continuo.[(b)=⇒(c)=⇒(d)] Ovvio.[(d)=⇒(a)] Sia T continuo in 0. Allora esiste δ > 0 tale che ‖x‖ < δimplica ‖T x‖ < 1. Quin<strong>di</strong> per qualsiasi x ∈ X con ‖x‖ = 1 si ha ‖(δ/2)x‖ < δe dunque (δ/2)‖T x‖ = ‖T (δ/2)x‖ < 1. Allora ‖x‖ = 1 implica ‖T x‖ < (2/δ).Di conseguenza T è limitato con norma ≤ (2/δ).✷Consideriamo adesso lo spazio <strong>di</strong> Banach L(X, Y ) <strong>di</strong> tutti gli operatorilineari e limitati da X in Y , dove X e Y sono spazi <strong>di</strong> Banach. ScriviamoL(X) se X = Y . Per X = F m e Y = F n (per F = R o F = C) lo spazioL(X, Y ) coincide con quello delle matrici n × m.Teorema II.4 (Teorema dell’Operatore Inverso) Siano X e Y spazi <strong>di</strong>Banach e sia T ∈ L(X, Y ) invertibile. Allora l’operatore inverso T −1 ∈L(Y, X).Teorema II.5 Siano T, S ∈ L(X), e sia T invertibile. Allora S è invertibilese ‖T − S‖ < ‖T −1 ‖ −1 . In particolare, S è invertibile se ‖I − S‖ < 1.Dimostrazione. L’equazione Sx = y può essere scritta nella forma equivalentex = F (x), doveF (x) = T −1 y + T −1 (T − S)x.Siccome‖F (x 1 ) − F (x 2 )‖ ≤ ‖T −1 ‖ ‖T − S‖ ‖x 1 − x 2 ‖,(II.2)dove ‖T −1 ‖ ‖T − S‖ < 1, si può risolvere l’equazione x = F (x) per iterazione,secondo il cosiddetto Teorema delle Contrazioni. Infatti, sia x 0 ∈ X un vettore30
iniziale e poniamo x n+1 = F (x n ) per n = 0, 1, 2, . . .. AlloraQuin<strong>di</strong>.‖x 2 − x 1 ‖ = ‖F (x 1 ) − F (x 0 )‖ ≤ ‖T −1 ‖‖T − S‖‖x 1 − x 0 ‖,‖x 3 − x 2 ‖ = ‖F (x 2 ) − F (x 1 )‖ ≤ ‖T −1 ‖‖T − S‖‖x 2 − x 1 ‖.≤ [‖T −1 ‖‖T − S‖] 2 ‖x 1 − x 0 ‖,...‖x n+1 − x n ‖ = ‖F (x n ) − F (x n−1 )‖ ≤ ‖T −1 ‖‖T − S‖‖x n − x n−1 ‖‖x n+p − x n+1 ‖ ≤≤ [‖T −1 ‖‖T − S‖] n ‖x 1 − x 0 ‖.p−1∑j=0≤ ‖x 1 − x 0 ‖...p−1∑‖x n+j+1 − x n+j ‖ ≤ ‖x 1 − x 0 ‖ [‖T −1 ‖‖T − S‖] n+j∞∑[‖T −1 ‖‖T − S‖] n+jj=0= ‖x 1 − x 0 ‖ [‖T −1 ‖‖T − S‖] n1 − ‖T −1 ‖‖T − S‖ .Quest’ultima espressione tende a zero se n → ∞. Dunque {x n } ∞ n=1 è unasuccessione <strong>di</strong> Cauchy in X e quin<strong>di</strong> ha limite x ∈ X. Utilizzando la continuitàdella F : X → X [ve<strong>di</strong> la (B.2)], otteniamo.j=0..x = limn→∞x n+1 = limn→∞F (x n ) = F ( limn→∞x n ) = F (x).L’unicità della soluzione è imme<strong>di</strong>ata.✷5.2 Proprietà spettraliSia X uno spazio <strong>di</strong> Banach complesso e sia T ∈ L(X). Per ogni λ ∈ Cconsideriamo gli operatori lineari λ−T (cioè, λI X −T scritto male). Stu<strong>di</strong>amol’invertibilità <strong>di</strong> λ − T al variare <strong>di</strong> λ.Il numero λ ∈ C si <strong>di</strong>ce autovalore <strong>di</strong> T se esiste 0 ≠ x ∈ X tale che(λ−T )x = 0 (cioè, tale che T x = λx). Il vettore x si chiama un corrispondenteautovettore. In tal caso Ker (λ − T ) = {x ∈ X : (λ − T )x = 0} è l’insieme<strong>di</strong> tutti gli autovettori corrispondenti all’autovalore λ, più il vettore zero. Ladefinizione generalizza quella per le matrici quadrate. Infatti, come per lematrici quadrate l’esistenza dell’autovettore 0 ≠ x ∈ X tale che T x = λximplica che λ − T non è invertibile. Per le matrici quadrate T basta risolverel’equazione det(λ − T ) = 0 per trovare tutti gli autovalori <strong>di</strong> T . Nel caso <strong>di</strong>uno spazio X a <strong>di</strong>mensione infinita la situazione è molto più complicata.31
Sia X uno spazio <strong>di</strong> Banach complesso e sia T ∈ L(X). Il numero complessoλ appartiene allo spettro <strong>di</strong> T , σ(T ), se λ − T NON è invertibile. Quin<strong>di</strong> tuttigli autovalori <strong>di</strong> T appartengono allo spettro <strong>di</strong> T . Il numero complesso λappartiene al risolvente <strong>di</strong> T , ρ(T ), se λ − T è invertibile. Dunque ρ(T ) è ilcomplementare <strong>di</strong> σ(T ).Teorema II.6 Sia T ∈ L(X). Allora lo spettro σ(T ) <strong>di</strong> T è un sottoinsiemechiuso, limitato e non vuoto <strong>di</strong> C, mentre il risolvente ρ(T ) <strong>di</strong> T è un aperto.Dimostrazione. Se |λ| > ‖T ‖, ‖λ −1 T ‖ < 1 implica l’invertibilità dell’operatoreλ − T = λ(I X − λ −1 T ). Inoltre(λ − T ) −1 = 1 λ∞∑j=0T jλ j= ∞∑j=0T jλ j+1 ,(II.3)dove la serie è convergente nella norma <strong>di</strong> L(X). Quin<strong>di</strong> lo spettro è contenutonella palla <strong>di</strong> centro zero e raggio ‖T ‖.Inoltre, se λ ∈ ρ(T ) e |µ−λ| < ‖(λ−T ) −1 ‖ −1 , allora ‖(λ−T )−(µ−T )‖ r. Allora r(T ) ≤ ‖T ‖ eσ(T ) è contenuto nel <strong>di</strong>sco <strong>di</strong> centro 0 e raggio r(T ). Infatti quel <strong>di</strong>sco è il <strong>di</strong>sco<strong>di</strong> centro 0 più piccolo che contiene lo spettro <strong>di</strong> T . Utilizzando l’espressioneper il raggio <strong>di</strong> convergenza <strong>di</strong> una serie <strong>di</strong> potenze, troviamor(T ) = limn→∞‖T n ‖ 1/n .Sia T ∈ L(X). La formula C = σ(T ) ∪ ρ(T ) rappresenta una partizionedel piano complesso in due insiemi <strong>di</strong>sgiunti. Adesso <strong>di</strong>scutiamo un’ulterioresud<strong>di</strong>visione <strong>di</strong> C in quattro insiemi due a due <strong>di</strong>sgiunti.a. Se λ − T è invertibile, λ ∈ ρ(T ). Altrimenti, λ ∈ σ(T ).5 In modo implicito abbiamo supposto che X sia uno spazio <strong>di</strong> Hilbert. La <strong>di</strong>mostrazionesi adatta facilmente al caso <strong>di</strong> uno spazio <strong>di</strong> Banach generale.6 Una funzione analitica e limitata in tutto il piano complesso è necessariamente costante.32
. Se Ker (λ − T ) = {0}, Im (λ − T ) è un sottospazio lineare denso in Xe Im (λ − T ) ≠ X, si ha λ ∈ σ c (T ). Tali punti λ appartengono allospettro continuo <strong>di</strong> T . In tal caso ogni x ∈ X si può approssimare davettori (λ − T )z per qualche z ∈ X. Purtroppo esistono x ∈ X tale chel’equazione (λ − T )z = x non ha nessuna soluzione z ∈ X.c. Se Ker (λ − T ) = {0} e Im (λ − T ) è un sottospazio NON denso in X, siha λ ∈ σ r (T ) [lo spettro residuo <strong>di</strong> T ].d. Se Ker (λ − T ) ≠ {0}, λ è un autovalore <strong>di</strong> T . L’insieme degli autovalorisi scrive come σ p (T ) [inglese: point spectrum]. Gli autovettoricorrispondenti all’autovalore λ sono tutti i vettori in Ker (λ − T ) \ {0}.Abbiamo ottenuto la partizioneC = ρ(T ) ∪ σ c (T ) ∪ σ r (T ) ∪ σ p (T )} {{ }σ(T )del piano complesso in quattro insiemi due a due <strong>di</strong>sgiunti.5.3 Operatori autoaggiunti e unitariDiscutiamo ora gli operatori lineari su uno spazio <strong>di</strong> Hilbert. Sia X uno spazio<strong>di</strong> Hilbert e sia T ∈ L(X). Si definisce l’operator aggiunto T ∗ dall’uguaglianzaSi <strong>di</strong>mostra facilmente che(T ∗ x, y) = (x, T y), x, y ∈ X.‖T ∗ ‖ = sup ‖T ∗ x‖ = sup | < T ∗ x, y > |‖x‖=1‖x‖=‖y‖=1= sup | < x, T y > | = sup ‖T y‖ = ‖T ‖.‖x‖=‖y‖=1‖y‖=1Quin<strong>di</strong> T ∗ ∈ L(X) e ‖T ∗ ‖ = ‖T ‖. Valgono le seguenti proprietà: (λT ) ∗ = λT ∗[(λT ) ∗ = λT ∗ in uno spazio <strong>di</strong> Hilbert reale], (T +S) ∗ = T ∗ +S ∗ , (T S) ∗ = S ∗ T ∗ ,(T ∗ ) ∗ = T .Sia X uno spazio <strong>di</strong> Hilbert e sia T ∈ L(X). Introduciamo le seguenticlassi <strong>di</strong> operatori lineari:a. Gli operatori autoaggiunti: T ∗ = T .b. Gli operatori unitari: T invertibile e T −1 = T ∗ .In uno spazio <strong>di</strong> Hilbert complesso T un operatore T ∈ L(X) è autoaggiuntose e solo se (T x, x) è un numero reale per ogni x ∈ X.33
Teorema II.7 Sia T ∈ L(X) un operatore autoaggiunto. AlloraInoltre, σ r (T ) = ∅.σ(T ) ⊂ {(T x, x) : ‖x‖ = 1} ⊂ R.Dimostrazione. Prima <strong>di</strong>mostriamo che σ p (T ) ⊂ R. Infatti se λ ∈ R e0 ≠ x ∈ X è il corrispondente autovettore tale che T x = λx, allora λ‖x‖ 2 =λ(x, x) = (T x, x) ∈ R e dunque λ ∈ R.Sia λ ∈ σ r (T ). Siccome Im (λ − T ) è un sottospazio lineare non denso inX, esiste 0 ≠ x ∈ X tale che ((λ − T )z, x) = 0 per ogni z ∈ X. In tal caso nesegue, per z = x,(T x, x)λ =(x, x) ∈ R.Quin<strong>di</strong> σ r (T ) ⊂ R. Da questo fatto si trova per ogni z ∈ X0 = ((λ − T )z, x) = (z, (λ − T )x),e quin<strong>di</strong> (λ − T )x = 0 mentre x ≠ 0. Risulta che λ ∈ σ p (T ). Siccomeσ p (T ) ⊂ R, si ha λ ∈ σ p (T ). Contrad<strong>di</strong>zione. Ne segue allora che σ r (T ) = ∅.Sia λ ∈ σ p (T ) ∪ σ c (T ). Allora esiste una successione {x n } ∞ n=1 in X taleche ‖x n ‖ = 1 (n ∈ N) e ‖(λ − T )x n ‖ → 0 se n → ∞. 7 Allora la stima|((λ − T )x n , x n )| ≤ ‖(λ − T )x n ‖‖x n ‖ con ‖x n ‖ = 1 implica cheλ − (T x n , x n ) = ((λ − T )x n , x n ) → 0, n → ∞. (II.4)Siccome (T x n , x n ) ∈ R per n ∈ N, ne segue λ ∈ R. Dunque σ p (T )∪σ c (T ) ⊂ R.Infine, σ(T ) = σ p (T ) ∪ σ c (T ) e la relazione (B.4) [dove ‖x n ‖ = 1 perogni n ∈ N] implicano che lo spettro <strong>di</strong> T è contenuto nell’intervallo chiusoe limitato più piccolo che contiene l’insieme {(T x, x) : ‖x‖ = 1}. Infatti, sia{(T x, x) : ‖x‖ = 1} ⊂ [m, M]. Alloram‖x‖ 2 ≤ (T x, x) ≤ M‖x‖ 2 , x ∈ X.Dunque per ogni x ∈ X{λ > M : (λ − M)‖x‖ 2 ≥ ((λ − T )x, x) ≥ (λ − m)‖x‖ 2λ < m : (m − λ)‖x‖ 2 ≤ ((T − λ)x, x) ≤ (M − λ)‖x‖ 2 .Di conseguenza, se λ ∈ R\[m, M], non esiste nessuna successione {x n } ∞ n=1 taleche ‖x n ‖ = 1 (n ∈ N) e ‖(λ − T )x n ‖ → 0. Quin<strong>di</strong> σ(T ) ⊂ [m, M]. ✷7 Se non esistesse, avremmo ‖(λ − T )x‖ ≥ ε > 0 per ogni vettore x <strong>di</strong> norma 1, il cheesclude λ ∈ σ p (T ) e implica la limitatezza <strong>di</strong> (λ − T ) −1 . Siccome σ r (T ) = ∅ implica che(λ − T ) −1 può essere definito su uno sottospazio denso, la sua definizione si estende a tuttolo spazio X e quin<strong>di</strong> λ ∈ ρ(T ).34
Si può infatti <strong>di</strong>mostrare che per un operatore lineare autoaggiunto l’insieme{(T x, x) : ‖x‖ = 1} è l’intervallo chiuso e limitato reale più piccoloche contiene lo spettro <strong>di</strong> T . In particolare, gli estremi <strong>di</strong> quell’intervalloappartengono a σ(T ). Purtroppo la <strong>di</strong>mostrazione non è elementare.Teorema II.8 Sia T ∈ L(X) un operatore autoaggiunto. Allora il suo raggiospettrale coincide con la sua norma: r(T ) = ‖T ‖.Dimostrazione.Sia T ∈ L(X) autoaggiunto. Allora‖T x‖ 2 = (T x, T x) = (T 2 x, x) ≤ ‖T 2 x‖‖x‖, x ∈ X,dove è stata applicata la <strong>di</strong>suguaglianza <strong>di</strong> Schwartz. Passando all’estremosuperiore per gli x ∈ X con ‖x‖ = 1 si ottiene ‖T ‖ 2 ≤ ‖T 2 ‖ e dunque‖T 2 ‖ = ‖T ‖ 2 .Questo implica‖T 2n ‖ 1/2n = ‖T ‖, n ∈ N.Passando al limite se n → ∞ si trova r(T ) = ‖T ‖.✷Passiamo ora agli operatori unitari. Utilizzando la formula <strong>di</strong> polarizzazionesi può <strong>di</strong>mostrare che un’isometria (cioè, un operatore lineare U su unospazio <strong>di</strong> Hilbert X tale che ‖Uϕ‖ = ‖ϕ‖ per ogni ϕ ∈ X) ha la proprietàe quin<strong>di</strong> la proprietà(Uϕ, Uψ) = (ϕ, ψ), ϕ, ψ ∈ X,(U ∗ Uϕ, Uψ) = (ϕ, ψ), ϕ, ψ ∈ X.Quest’ultimo implica che U è un’isometria in X se e solo se U ∗ U = I X . Nellastessa maniera si vede che un operatore U ha la proprietà che U ∗ è un’isometriase e solo se UU ∗ = I X . Conclusione: U è un operatore unitario se e solo se U eU ∗ sono ambedue isometrie se e solo se U è un’isometria invertibile. Siccomein tal caso anche U n e U −n = (U −1 ) n sono isometrie (n = 1, 2, 3, . . .) se U èunitario, risultaDi conseguenza,e quin<strong>di</strong> σ(U) ⊂ {z ∈ C : |z| = 1}.‖U n ‖ = ‖U −n ‖ = 1, n = 1, 2, 3, . . . .r(U) = r(U −1 ) ≤ 1,35
5.4 Operatori autoaggiunti non limitatiCi vuole una teoria degli operatori lineari autoaggiunti non limitati in unospazio <strong>di</strong> Hilbert. Siano H uno spazio <strong>di</strong> Hilbert complesso e T un operatorelineare con dominio D(T ) denso in H. Allora T si <strong>di</strong>ce hermitiano [oppuresimmetrico] se(T x, y) = (x, T y), x, y ∈ D(T ).Per un operatore hermitiano T , definiamo l’operatore T ∗ da⎧ {}⎪⎨D(T ∗ ∃c = c(y) > 0 :) = y ∈ H :,|(T x, y)| ≤ c(y)‖x‖, x ∈ D(T )⎪⎩In tal caso ∃! z ∈ H : (T x, y) = (x, z); Poniamo T ∗ y = z.Ovviamente, {D(T ) ⊂ D(T ∗ ),T ∗ x = T x, x ∈ D(T ),cioè T ∗ estende T (scritto: T ⊂ T ∗ ).Un operatore lineare T si <strong>di</strong>ce autoaggiunto se D(T ) è denso in H, T èhermitiano e T ∗ = T . Quin<strong>di</strong> T è autoaggiunto se T è hermitiano e il suodominio è denso e sod<strong>di</strong>sfaD(T ) ={y ∈ H :}∃c = c(y) > 0 :.|(T x, y)| ≤ c(y)‖x‖, x ∈ D(T )In tal caso l’insieme risolvente ρ(T ) <strong>di</strong> tutti i punti λ ∈ C per cui⎧⎪⎨ (λ − T )[D(T )] = H,Ker (λ − T ) def= {x ∈ D(T ) : T x = λx} = {0},⎪⎩∃c(λ) > 0 : ‖(λ − T ) −1 x‖ ≤ c(λ)‖x‖ per x ∈ H,contiene C \ R. Quin<strong>di</strong> il suo complementare, lo spettro σ(T ) = C \ ρ(T ), èun sottoinsieme chiuso (ma non necessariamente limitato 8 ) della retta reale.Inoltre, lo spettro residuo σ r (T ) è vuoto.Non tutti gli operatori simmetrici hanno un’estensione autoaggiunta. Inoltre,se esiste, ne esistono molte. Senza <strong>di</strong>mostrazione enumciamo il seguenterisultato.Teorema II.9 (Friedrichs) Sia T un operatore hermitiano in H tale che perun’opportuna costante q(T x, x) ≥ q‖x‖ 2 , x ∈ D(T ).8 Infatti σ(T ) è limitato se e solo se D(T ) = H se e solo se T è limitato.36
Allora esiste un’unica estensione autoaggiunta T <strong>di</strong> T , la cosiddetta estensione<strong>di</strong> Friedrichs, tale che(T x, x) ≥ q‖x‖ 2 , x ∈ D(T ).Sotto le ipotesi del Teorema B.8 potrebbero esistere moltissime estensioniautoaggiunte <strong>di</strong> T , ma soltanto quella <strong>di</strong> Friedrichs ha la proprietà <strong>di</strong> esserelimitata inferiormente.Nei Cap. IV e V <strong>di</strong>scuteremo l’estensione autoaggiunta L <strong>di</strong> un operatore <strong>di</strong>Sturm-Liouville L. Essendo q min il minimo del coefficiente q(x) dell’operatore<strong>di</strong>fferenziale, quest’operatore L è simmetrico nel senso che (Lf, g) = (f, Lg) perf, g nel dominio M L <strong>di</strong> L e sod<strong>di</strong>sfa (Lf, f) ≥ q min ‖f‖ 2 2 per f ∈ M L . In tal casoun’estensione L definita in un dominio denso D(L) tale che L[D(L) = L 2 (Ω)e G def= L −1 è un operatore integrale con nucleo hermitiano continuo G(x, y),la cosiddetta funzione <strong>di</strong> Green, tutto quanto sotto l’ipotesi che λ = 0 non siaautovalore del problema <strong>di</strong> Sturm-Liouville. Nel caso uni<strong>di</strong>mensionale abbiamoinfatti <strong>di</strong>mostrato tutti i passaggi. L’abbiamo lasciato in sospeso nel casomulti<strong>di</strong>mensionale.37
Capitolo IIIEQUAZIONI <strong>DI</strong>FFERENZIALIE FUNZIONI SPECIALIIn questo capitolo iniziamo a <strong>di</strong>scutere le equazioni <strong>di</strong>fferenziali lineari <strong>di</strong> secondoor<strong>di</strong>ne, in particolare la teoria <strong>di</strong> Frobenius. Poi <strong>di</strong>scutiamo le cosiddettefunzioni speciali. Tali funzioni vengono utilizzate spesso nelle applicazioni eloro proprietà vengono tabellate. Tra i libri <strong>di</strong> tabellazione più utilizzati citrovano i classici libri <strong>di</strong> Abramowitz e Stegun [1], <strong>di</strong> Gradshteyn e Ryzik [7],<strong>di</strong> Watson [20] (che è specializzato nelle funzioni <strong>di</strong> Bessel), e <strong>di</strong> Whittaker eWatson [21]. È più moderno il libro <strong>di</strong> Varshalovich, Moskalev e Khersonskii[18]. La teoria dei polinomi ortogonali si trova nel classico libro <strong>di</strong> Szegő [16].1 Equazioni Differenziali <strong>di</strong> Secondo Or<strong>di</strong>neConsideriamo l’equazione <strong>di</strong>fferenziale lineare non omogeneay ′′ + a 1 (x)y ′ + a 0 (x)y = g(x), x ∈ I, (III.1)dove a 0 , a 1 e g sono funzioni reali continue <strong>di</strong> x ∈ I, essendo I un intervalloaperto della retta reale. Allora per ogni x 0 ∈ I e per ogni coppia <strong>di</strong> numeri(y 0 , y 1 ) ∈ R 2 esiste una soluzione unica della (II.1) tale chey(x 0 ) = y 0 , y ′ (x 0 ) = y 1 . (III.2)Ponendo y p per la soluzione particolare dell’equazione non omogenea (II.1) chesod<strong>di</strong>sfa alle con<strong>di</strong>zioni y p (x 0 ) = y ′ p(x 0 ) = 0, la soluzione del problema a valoriiniziali (II.1)-(II.2) ha la seguente forma:y(x) = y 0 Y 1 (x) + y 1 Y 2 (x) + y p (x),(III.3)39
dove Y 0 e Y 1 sono le soluzioni della corrispondente equazione omogeneatali chey ′′ + a 1 (x)y ′ + a 0 (x)y = 0, x ∈ I, (III.4)Y 0 (x 0 ) = 1, Y 0(x ′0 ) = 0, (III.5)Y 1 (x 0 ) = 0, Y 1(x ′0 ) = 1. (III.6)Quin<strong>di</strong> le soluzioni dell’equazione omogenea (II.4) costituiscono uno spaziovettoriale reale <strong>di</strong> <strong>di</strong>mensione 2.La mappa (y 0 , y 1 ) ↦→ y, con y la soluzione dell’equazione omogenea (II.4)che sod<strong>di</strong>sfa la (II.2), è una corrispondenza biunivoca lineare tra R 2 e lo spaziovettoriale delle soluzioni dell’equazione omogenea (II.4). Dunque due soluzioniy 1 e y 2 dell’equazione omogenea (II.4) sono linearmente in<strong>di</strong>pendenti se esolo se sono linearmente in<strong>di</strong>pendenti i loro vettori colonna dei dati iniziali(y j (x 0 ), y j(x ′ 0 )) T (j = 1, 2), cioè se e solo se il loro Wronskianow(x 0 ) def= det(y1 (x 0 ) y 2 (x 0 )y 1(x ′ 0 ) y 2(x ′ 0 ))≠ 0.(III.7)La matrice 2 × 2 nella (II.7) si <strong>di</strong>ce matrice Wronskiana. Sicome la trasformazionelineare dai dati iniziali delle soluzioni della equazione omogenea in x 0 aidati iniziali in un altro punto ˆx 0 ∈ I è per forza una corrispondenza biunivoca,ne segue che il Wronskiano w(x) si annulla da nessuna parte oppure si annulladappertutto in I. Quest’ultima proprietà si <strong>di</strong>mostra anche nel seguente modo:w ′ (x) = ddx (y 1y 2 ′ − y 2 y 1) ′ = y 1 y 2 ′′ − y 2 y 1′′= y 1 (−a 1 y 2 ′ − a 0 y 2 ) − y 2 (−a 1 y 1 ′ − a 0 y 1 )= −a 1 (y 1 y ′ 2 − y 2 y ′ 1) = −a 1 w. (III.8)Quin<strong>di</strong>, w(x) = cost. exp (−A 1 (x)), essendo A 1 una primitiva della funzionecoefficiente a 1 . Di conseguenza, w(x) = 0 se e solo se si annulla la costante see solo se w(x) = 0 per ogni x ∈ I.Per risolvere l’equazione non omogenea (II.1) partendo da due soluzioni linearmentein<strong>di</strong>pendenti y 1 e y 2 della corrispondente equazione omogenea (II.4),si utilizzi il metodo della variazione dei parametri. Ponendoy(x) = c 1 (x)y 1 (x) + c 2 (x)y 2 (x)(III.9)e facendo l’ipotesi che c ′ 1(x)y 1 (x) + c ′ 2(x)y 2 (x) = 0 per ogni x ∈ I, si arriva alseguente sistema lineare( ) ( ) ( )y1 (x) y 2 (x) c′1 (x) 0y 1(x)′ y 2(x)′ c ′ = . (III.10)2(x) g(x)40
Essendo w(x) ≠ 0 (per ogni x ∈ I) il determinante della matrice del sistemalineare (II.10) (cioè il Wronskiano), risulta la soluzione( ) c′1 (x)c ′ = 1 ( ) ( )y′2 (x) −y 2 (x) 02(x) w(x) −y 1(x)′ = g(x) ( ) −y2 (x), (III.11)y 1 (x) g(x) w(x) y 1 (x)da cui si trovano c 1 (x) e c 2 (x) (e dunque la soluzione y) integrando.2 Metodo <strong>di</strong> FrobeniusL’equazione <strong>di</strong>fferenziale or<strong>di</strong>nariay ′′ + P (x)y ′ + Q(x)y = 0,(III.12)dove P (x) e Q(x) sono funzioni analitiche in un intorno <strong>di</strong> x = 0 e quin<strong>di</strong> ammettonouno sviluppo in potenze <strong>di</strong> x con raggio <strong>di</strong> convergenza strettamentepositiva, può essere risolta sostituendo y(x) = ∑ ∞n=0 c nx n . Risulta una relazione<strong>di</strong> ricorrenza per i coefficienti c n che ci consente a calcolare c 2 , c 3 , c 4 , . . .in modo unico dai coefficienti iniziali c 0 = y(0) e c 1 = y ′ (0). Inoltre, il raggio<strong>di</strong> convergenza della serie <strong>di</strong> potenze per la y(x) non è inferiore al minimo deiraggi <strong>di</strong> convergenza delle serie <strong>di</strong> potenze per P (x) e Q(x). Siccome y(0) ey ′ (0) determinano completamente la soluzione y, si trovano in tal modo tuttele soluzioni dell’equazione <strong>di</strong>fferenziale (II.12).Esempio III.1 Il metodo <strong>di</strong> resoluzione sostituendo y = ∑ ∞n=0 c nx n vieneillustrato dall’equazione <strong>di</strong> Airyy ′′ = xy.Siccome y ′′ (0) = 0, abbiamo c 2 = 0. Quin<strong>di</strong> y ′′ = ∑ ∞∑ n=0 n(n − 1)c nx n−2 =∞n=0 (n + 3)(n + 2)c n+3x n+1 e xy = ∑ ∞n=0 c nx n+1 implicano∞∑(n + 3)(n + 2)c n+3 x n+1 =n=0e quin<strong>di</strong> si arriva alla relazione <strong>di</strong> ricorrenza∞∑c n x n+1 ,n=0(n + 2)(n + 3)c n+3 = c n , n = 0, 1, 2, . . . ,partendo da c 0 = y(0), c 1 = y ′ (0) e c 2 = 0. Quin<strong>di</strong>c 3k =c 02.3.5.6.8.9. . . . .(3k − 1)(3k) , c 3k+1 =41c 13.4.6.7.9.10. . . . .(3k)(3k + 1) ,
e c 2 = c 5 = c 8 = . . . = 0. Di conseguenza∞∑ x 3k∞∑y(x) = y(0)2.3.5.6. . . . .(3k − 1)(3k) + y′ (0)k=0k=0dove ambedue le serie hanno raggio <strong>di</strong> convergenza +∞.x 3k+13.4.6.7. . . . .(3k)(3k + 1) ,Il metodo <strong>di</strong> Frobenius (1877) è stato sviluppato per risolvere certeequazioni <strong>di</strong>fferenziali or<strong>di</strong>narie con coefficienti singolari utilizzando lo sviluppodella soluzione in serie <strong>di</strong> potenza. In tal caso l’equazione <strong>di</strong>fferenziale ha laforma (II.12), dove p(x) def= P (x)/x e q(x) def= Q(x)/x 2 sono funzioni analitichein un intorno <strong>di</strong> x = 0. Si <strong>di</strong>ce che x = 0 è una singolarità regolare [inglese:regular singularity] dell’equazione.Consideriamo prima l’esempio più elementare <strong>di</strong> un’equazione <strong>di</strong>fferenzialecon singolarità regolare ad x = 0, la cosiddetta equazione <strong>di</strong> Eulerox 2 y ′′ + pxy ′ + qy = 0,(III.13)dove p e q sono coefficienti costanti reali. Per (±x) > 0 sostituiamo x = ±e t ,dove t ∈ R, e arriviamo all’equazione a coefficienti costantid 2 y+ (p − 1)dy + qy = 0.dt2 dt (III.14)La sua equazione caratteristica, ora detta equazione in<strong>di</strong>ciale, èα(α − 1) + pα + q = 0.(III.15)Quest’equazione segue dalla (II.13) sostituendo y = (±x) α per (±x) > 0.Ci sono tre possibilità:a. Discriminante = (p − 1) 2 − 4q > 0. L’equazione in<strong>di</strong>ciale (II.15) ha duera<strong>di</strong>ci reali <strong>di</strong>verse α 1 e α 2 . In tal caso la soluzione della (II.13) èy(x) = c 1 e α 1t + c 2 e α 2t = c 1 |x| α 1+ c 2 |x| α 2.b. Discriminante = (p − 1) 2 − 4q = 0. L’equazione in<strong>di</strong>ciale (II.15) ha unasingola ra<strong>di</strong>ce reale α doppia. In tal caso la soluzione della (II.13) èy(x) = c 1 e αt + c 2 t e αt = c 1 |x| α + c 2 |x| α ln |x|.c. Discriminante = (p − 1) 2 − 4q < 0. L’equazione in<strong>di</strong>ciale (II.15) ha duera<strong>di</strong>ci complesse coniugate σ ± iτ dove σ e τ sono reali. In tal caso lasoluzione della (II.13) èy(x) = e σt [c 1 cos(τt) + c 2 sin(τt)]=|x| σ [c 1 cos(τ ln |x|) + c 2 sin(τ ln |x|)] .42
Spieghiamo ora il Metodo <strong>di</strong> Frobenius (1877). Si cerchi la generalizzazionedella risoluzione dell’equazione <strong>di</strong> Eulero alle equazione <strong>di</strong>fferenzialix 2 y ′′ (x) + xp(x)y ′ (x) + q(x)y(x) = 0,(III.16)dove p(x) e q(x) sono funzioni analitiche in un intorno <strong>di</strong> x = 0 nel pianocomplesso. Ciò vuol <strong>di</strong>re che∞∑∞∑p(x) = p n x n , q(x) = q n x n ,n=0n=0(III.17)dove ambedue serie <strong>di</strong> potenze hanno un raggio <strong>di</strong> convergenza strettamentepositiva. Sostituiamo ora nella (II.16)y(x) = x α∑ ∞n=0c n x n =∞∑c n x n+α ,n=0(III.18)dove, per ipotesi, la serie ha un raggio <strong>di</strong> convergenza R > 0. 1 Alloraxy ′ (x) =∞∑(n + α)c n x n+α , x 2 y ′′ (x) =n=0∞∑(n + α)(n + α − 1)c n x n+α ,(III.19)dove abbiamo calcolato le derivate termine a termine. Sostituendo la (II.18) ela (II.19) nella (II.16) otteniamo[∞∑(n + α)(n + α − 1)c n +n=0n=0n∑p n−j (j + α)c j +Quin<strong>di</strong> tutti i coefficienti <strong>di</strong> questa serie si devono annulare:(n + α)(n + α − 1)c n +j=0n∑p n−j (j + α)c j +j=0]n∑q n−j c j x n+α = 0.j=0n∑q n−j c j = 0, n = 0, 1, 2, . . . .j=0La (II.20) si può anche scrivere nella forma matricialen∑T (α) nj c j = 0,j=0(III.20)1 Si può <strong>di</strong>mostrare che il raggio <strong>di</strong> convergenza <strong>di</strong> questa serie <strong>di</strong> potenze non è inferioreal minimo dei raggi <strong>di</strong> convergenza delle serie <strong>di</strong> potenze nella (II.17).43
dove la matrice semiinfinita T (α) con elementi⎧⎪⎨ Λ(α + n) def= (α + n)(α + n − 1) + p 0 (α + n) + q 0 , n = j,T (α) nj = p n−j (j + α) + q n−j , n > j,⎪⎩0, n < j.(III.21)è sottotriangolare. In particolare, abbiamo trovate la cosiddetta equazionein<strong>di</strong>cialeΛ(α) def= α(α − 1) + p 0 α + q 0 = 0. (III.22)Affinchè c 0 ≠ 0, α deve essere una ra<strong>di</strong>ce della (II.22).Teorema III.2 (Frobenius) Supponiamo che l’equazione in<strong>di</strong>cale (II.20) hadue zeri <strong>di</strong>versi con una <strong>di</strong>fferenza non intera. Allora, scegliendo per α unodegli zeri, si ottengono due soluzioni linearmente in<strong>di</strong>pendenti della (II.16) per|x| inferiore al minimo dei raggi <strong>di</strong> convergenza delle serie <strong>di</strong> potenza (II.17).Scrivendo la (II.21) nella forman∑T (α) nj c j = −c 0 T (α) n0 , n = 1, 2, . . . , m, . . . ,j=1dove α è uno zero dell’equazione in<strong>di</strong>ciale (II.22) edet (T (α) nj ) m n,j=1= Λ(α + 1)Λ(α + 2) . . . Λ(α + m),troviamo in modo unico tutti i coefficienti c 1 , c 2 , . . . , c m , . . . se nessuno deinumeri α + 1, α + 2, . . . , α + m, . . . è uno zero dell’equazione in<strong>di</strong>ciale (II.22).In tal caso risultano due soluzioni linearmente in<strong>di</strong>pendenti, una per ciascunozero della (II.22).Se l’equazione in<strong>di</strong>ciale (II.22) ha un singolo zero α ∈ R, allora la (II.18)conduce ad una singola soluzione linearmente in<strong>di</strong>pendente della (II.16). Pertrovare una seconda soluzione linearmente in<strong>di</strong>pendente, si calcolino i coefficientic n (α) dal coefficiente c 0 utilizzando la (II.20) e inserendo α come fosseun parametro libero. La seconda soluzione linearmente in<strong>di</strong>pendente ora ha laseguente forma: [∂∞∑c n (α)x n+α , (III.23)∂α]α=α 0n=0dove α 0 è il singolo zeri dell’equazione in<strong>di</strong>ciale.Se l’equazione in<strong>di</strong>ciale ha due zeri reali con <strong>di</strong>fferenza intera, α 0 e α 0 −N per un opportuno N ∈ N, allora la situazione è abbastanza complicata,44
poichè in alcuni casi si trovano due soluzioni linearmente in<strong>di</strong>pendenti e neglialtri casi due soluzioni proporzionali. Sostituendo α = α 0 , essendo α 0 lozero maggiore, si vede subito che si possono trovare tutti i coefficienti c ndal coefficiente c 0 in modo unico. D’altra parte, sostituendo α = α 0 − N,essendo α 0 − N lo zero minore, si vede subito che si possono calcolare in modounico i coefficienti c 1 , . . . , c 2 , . . . , c N−1 dal coefficiente c 0 risolvendo il sistema<strong>di</strong> equazioni lineari⎛⎞ ⎛ ⎞ ⎛ ⎞Λ(α + 1) 0 . . . 0c 1T (α) 10T (α) 21 Λ(α + 2).c 2⎜⎟ ⎜ ⎟⎝ .... . ⎠ ⎝ . ⎠ = −c T (α) 200 ⎜ ⎟⎝ . ⎠ ,T (α) N−1,1 . . . . . . Λ(α + N − 1) c N−1 T (α) N−1,0} {{ }determinante=Λ(α 0 −N+1)Λ(α 0 −N+2)...Λ(α 0 −1)≠0(III.24)dove α = α 0 − N. Arriviamo così alla soluzione unica⎛ ⎞⎛⎞c 1T (α 0 − N) 10c 2⎜ ⎟⎝ . ⎠ = −c 0M −1 T (α 0 − N) 20⎜⎟⎝ . ⎠ ,c N−1 T (α 0 − N) N−1,0dove M è la matrice quadrata nella (II.24).Esten<strong>di</strong>amo ora la (II.24) al sistema <strong>di</strong> equazioni (II.21) per m = N eα = α 0 − N. In tal caso l’ultima equazione ha la formaoppureN−1∑j=0[p N−j (j + α 0 − N) + q N−j ] c j = 0,c 0 {T (α 0 − N) N,0⎛⎞⎫+ ( T (α) 0 − N) 10 ⎪⎬T (α 0 − N) N,1 . . . T (α 0 − N) N,N−1 M−1 ⎜⎟⎝ . ⎠T (α 0 − N)⎪⎭ = 0.N−1,0Ora ci sono due possibilità.Prima: Se non si annulla l’espressione tra parentesi graffe, dobbiamo perforza scegliere c 0 = 0. In tal caso c 0 = c 1 = . . . = c N−1 = 0. Scegliamo ora uncoefficiente c N . Allora la (II.20) per n ≥ N + 1 e α = α 0 − N ci consentonoa calcolare c N+1 , c N+2 , . . . da c N in modo unico. Ponendo d n = c N+n per45
n = 0, 1, 2, . . . e n = N + m per m = 0, 1, 2, . . ., la (II.20) ha la formam∑m∑(m+α 0 )(m+α 0 −1)d m + p m−l (l+α 0 )d l + q m−l d l = 0, m = 0, 1, 2, . . . ,l=0(III.25)e quin<strong>di</strong> per α = α 0 −N si otterrà una soluzione proporzionale a quella ottenutaper α = α 0 .Seconda: Se si annulla l’espressione tra parentesi graffe, allora l’equazioneper c N risulta infatti la tautologia 0 = 0, mentre per n ≥ N + 1 e α = α 0 − Nla (II.20) conduce a valori per i coefficienti c N+1 , c N+2 , . . . che <strong>di</strong>pendono inmodo unico e lineare dai coefficienti c 0 e c N . Quin<strong>di</strong> si otterranno due soluzionilinearmente in<strong>di</strong>pendenti.Esempio III.3 Consideriamo l’equazione <strong>di</strong>fferenziale <strong>di</strong> Bessell=0x 2 y ′′ (x) + xy ′ (x) + (x 2 − ν 2 )y(x) = 0<strong>di</strong> or<strong>di</strong>ne ν ≥ 0, dove p(x) ≡ 1 e q(x) = x 2 − ν 2 . Quin<strong>di</strong> p 0 = 1, q 0 = −ν 2 eq 2 = 1, e l’equazione in<strong>di</strong>cialeΛ(α) = α(α − 1) + p 0 α + q 0 = α 2 − ν 2 = 0ha gli zeri ±ν. Di consequenza, se 2ν non è un intero, il metodo <strong>di</strong> Frobeniusconduce a due soluzioni linearmente in<strong>di</strong>pendenti. Supponiamo ora che 0 ≠2ν ∈ Z. Allora la (II.24) implica{Λ(−ν + 1)c 1 = 0,(III.26)Λ(−ν + n)c n + c n−2 = 0, n = 2, . . . ,dove 0 /∈ {Λ(−ν +n) : n = 1, 2, . . . , 2ν −1}∪{Λ(−ν +n) : n ≥ 2ν +1}. È facilecapire che per 2ν <strong>di</strong>spari si trovano due soluzioni linearmenti in<strong>di</strong>pendenti,mentre per 2ν si trova una singola soluzione linearmente in<strong>di</strong>pendente. Infatti,se 2ν è pari, per n = 2ν si trova c 2ν−2 = 0; utilizzando la (II.26) per n =2, 4, . . . , 2ν − 2 pari, otteniamo 0 = c 2ν−2 = c 2ν−4 = . . . = c 2 = c 0 , mentre la(II.26) per n = 1, 3, . . . , 2ν − 1 conduce a 0 = c 1 = c 3 = . . . = c 2ν−1 = 0. Per2ν <strong>di</strong>spari, lo stesso raggionamento conduce a c 1 = c 3 = . . . = c 2ν = . . . = 0<strong>di</strong>rettamente.3 Funzioni IpergeometricheConsideriamo ora la funzione ipergeometrica∞∑ (α) k (β) k2F 1 (α, β; γ; z) =z k (III.27)k! (γ) k46k=0
per |z| abbastanza piccola, dove il simbolo <strong>di</strong> Pochhammer α 0 = 1 edef(α) k = α(α + 1)(α + 1)(α + 2) . . . (α + k + 1) =Ovviamente si ha la relazione <strong>di</strong> simmetria2F 1 (α, β; γ; z) = 2 F 1 (β, α; γ; z)Γ(α + k).Γ(α)per |z| abbastanza piccola. Ovviamente[ d2F 1 (α, β; γ; 0) = 1,dz 2 F 1 (α, β; γ; z)]z=0= αβγ .(III.28)α β γ z 2F 1 (α, β; γ; z)α β β z (1 − z) −α1 1 2 z − log(1 − z)/z1 31 z 2 12 2 2z1 1 32 21 312log1+z1−zz 2 arcsin(z)/z2−z 2 arctan(z)/z2Per trovare un’espressione integrale per le funzioni ipergeometriche si ricordaprima che(β) k(γ) k==Γ(β + k)Γ(γ) B(β + k, γ − β)=Γ(β)Γ(γ + k) B(β, γ − β)1B(β, γ − β)Sostituendolo nella (II.27) otteniamo2F 1 (α, β; γ; z) ===1B(β, γ − β)1B(β, γ − β)1B(β, γ − β)∞∑k=0∫ 10∫ 10∫ 10(1 − t) γ−β−1 t β+k−1 dt.(α) kk!∫ 1z k (1 − t) γ−β−1 t β+k−1 dt0(1 − t) γ−β−1 t β−1 { ∞∑k=0(1 − t) γ−β−1 t β−1 (1 − zt) −α dt,}(α) k(zt) k dtk!valida per |z| < 1 e γ > β > 0, dove B è la funzione beta <strong>di</strong> Eulero [Ve<strong>di</strong>l’Appen<strong>di</strong>ce A]. Sostituendo z = 1 si ottiene2F 1 (α, β; γ; 1) =1B(γ − β)∫ 10(1 − t) γ−α−β−1 t β−1 dt =B(β, γ − α − β)B(β, γ − β)47
per γ − α − β > 0 e β > 0. Esprimendo le funzioni beta <strong>di</strong> Eulero in funzionigamma (ve<strong>di</strong> l’Appen<strong>di</strong>ce A) otteniamo il teorema <strong>di</strong> Gauss2F 1 (α, β; γ; 1) =Γ(γ)Γ(γ − α − β)Γ(γ − α)Γ(γ − β) ,(III.29)dove γ − α − β > 0 e β > 0.La funzione ipergeometrica 2 F 1 (α, β; γ; z) sod<strong>di</strong>sfa all’equazione <strong>di</strong>fferenzialeipergeometricax(1 − x)y ′′ (x) + {γ − (α + β + 1)x} y ′ (x) − αβy = 0. (III.30)Tutti i punti z ∈ C \ {0, 1, ∞} sono punti regolari della (II.29) (cioè, esistonodue soluzini linearmente in<strong>di</strong>pendenti in un intorno <strong>di</strong> ciascuno <strong>di</strong> questi punti),mentre 0, 1 e ∞ sono singolarità regolari.Intorno a x = 0 la (II.30) ha la formay ′′ +Qun<strong>di</strong> l’equazione in<strong>di</strong>ciale èγ − (α + β + 1)xy ′ −αβx(1 − x) x(1 − x) y = 0.µ(µ − 1) + γµ = µ(µ + γ − 1) = 0,con gli zeri 0 e 1 − γ. Quin<strong>di</strong> la sostituzione y(x) = x µ ∑ ∞k=0 c kx k per µ ∈{0, 1 − γ} conduce a due soluzioni linearmente in<strong>di</strong>pendenti per |x| < 1 seγ /∈ Z.Intorno a x = 1 l’equazione in<strong>di</strong>ciale èµ(µ − 1) + (α + β − γ + 1)µ = µ(µ + α + β − γ) = 0,con gli zeri 0 e γ−α−β. Quin<strong>di</strong> la sostituzione y(x) = (x−1) ∑ µ ∞k=0 c k(x−1) kper µ ∈ {0, γ − α − β} conduce a due soluzioni linearmente in<strong>di</strong>pendenti per|x − 1| < 1 se γ − α − β /∈ Z.Intorno a x = ∞ possiamo trasformare la (II.30) ponendo z = 1/x e considerandoz = 0 come singolarità regolare. Si ottiene l’equazione <strong>di</strong>fferenziale1z(1 − 1 z)z 2 d dz (z2 y ′ (z)) −[γ − α + β + 1z]z 2 dydz − αβy(z)= z 2 (z − 1)y ′′ (z) − z[2(1 − z) + γz − α − β − 1]y ′ (z) − αβy(z) = 0.L’equazione in<strong>di</strong>ciale èµ(µ − 1) + µ(1 − α − β) + αβ = (µ − α)(µ − β) = 0.48
Quin<strong>di</strong> la sostituzione y(x) = x −µ ∑ ∞k=0 c kx −k per µ ∈ {α, β} conduce a duesoluzioni linearmente in<strong>di</strong>pendenti per |x| > 1 se α − β /∈ Z.Per passare all’equazione ipergeometrica confluente osserviamo prima chela funzione 2 F 1 (α, β; γ; x/β) sod<strong>di</strong>sfa all’equazione <strong>di</strong>fferenziale(x 1 − x ) { (d 2 yβ dx + γ − 1 + α + 1) ) } dyx − αy = 0.2 β dx (III.31)Facendo tendere β → ∞ si arriva alla cosiddetta equazione ipergeometricaconfluentexy ′′ (x) + (γ − x)y ′ (x) − αy = 0.(III.32)Siccome (β) k /β k → 1 se β → ∞ per k fissa, otteniamo come una delle soluzionila funzione ipergeometrica confluente1F 1 (α; γ; x) =∞∑k=0(α) k(γ) k k! xr .(III.33)α γ z 1F 1 (α; γ; z)α α z e(zα + 1 α z 1 + α )e zz12√3 π−z 2 22z erf(z)Tutti i punti in C \ {0, ∞} sono regolari, mentre zero e ∞ sono singolaritàdella (II.31). Infatti, intorno ad x = 0 si ottiene l’equazione in<strong>di</strong>cialeµ(µ − 1) + γµ = µ(µ + γ − 1) = 0,con gli zeri 0 e 1 − γ. Quin<strong>di</strong> la sostituzione y(x) = x µ ∑ ∞k=0 c kx k per µ ∈{0, 1 − γ} conduce a due soluzioni linearmente in<strong>di</strong>pendenti per |x| < 1 se γ /∈Z. Il punto all’infinito non è una singolarità regolare. Infatti, la sostituzionez = (1/x) nella (II.32) conduce all’equazione <strong>di</strong>fferenziale1 d (z z2 z 2 dy ) (+ γ − 1 ) dydz dz z dz − αy = 0oppurez 3 d2 ydz + ([2 + 2 γ]z2 − z) dy − αy = 0.dz49
4 Funzioni <strong>di</strong> BesselConsideriamo l’equazione <strong>di</strong>fferenzialex 2 u ′′ + xu ′ + (x 2 − ν 2 )u = 0,(III.34)detta equazione <strong>di</strong> Bessel. Ogni soluzione <strong>di</strong> quest’equazione non identicamentenulla è detta funzione cilindrica.4.1 Definizione e proprietà sempliciConsideriamo, per ν ∈ R, la funzione 2J ν (x) =∞∑k=0(−1) k ( x) 2k+ν, (III.35)Γ(k + ν + 1)Γ(k + 1) 2dove Γ(z) è la funzione Gamma che sod<strong>di</strong>sfa Γ(z + 1) = z Γ(z) e Γ(1) = 1 [ve<strong>di</strong>l’Appen<strong>di</strong>ce A]. Si può rappresentare nella formaJ ν (x 2 ) = x ν f ν (x 2 ),(III.36)dove f ν (ζ) è una funzione analitica in tutto il piano complesso,f ν (ζ) =∞∑k=0(−1) k ζ k2 2k+ν Γ(k + ν + 1)Γ(k + 1) , (III.37)con raggio <strong>di</strong> convergenza R = +∞. Quin<strong>di</strong> la sua somma definisce unafunzione analitica f ν (ζ) in tutto il piano complesso.Verifichiamo che la funzione J ν (x) sod<strong>di</strong>sfa l’equazione (II.34). Utilizzandola relazione Γ(z + 1) = zΓ(z), si ottienex 2 J ν ′′ (x) + xJ ν(x) ′ − ν 2 J ν (x)∞∑ (−1) k [(2k + ν)(2k + ν − 1) + (2k + ν) − ν 2 ]( x) 2k+ν=Γ(k + ν + 1)Γ(k + 1)2k=0∞∑ (−1) k 4k(k + ν)( x) 2k+ν ∑ ∞(−1) k ( x) 2k+ν== 4Γ(k + ν + 1)Γ(k + 1) 2Γ(k + ν)Γ(k) 2k=0k=1= −x 2 ∞∑k=0(−1) kΓ(k + ν + 1)Γ(k + 1)( x2) 2k+ν= −x 2 J ν (x),2 La (II.35) si può anche derivare applicando il metodo <strong>di</strong> Frobenius.50
come dovevasi <strong>di</strong>mostrare. La funzione cilindrica J ν (x) si <strong>di</strong>ce funzione <strong>di</strong>Bessel <strong>di</strong> or<strong>di</strong>ne ν, dove x ν > 0 per x > 0. In particolare⎧ √ √2∞∑ (−1) k2⎪⎨ J 1/2 (x) =πx (2k + 1)! x2k+1 = sin x,πx√ k=0√2∞∑(III.38)(−1) k 2⎪⎩J −1/2 (x) =πx (2k)! x2k = cos x.πxk=0Se ν > 0 non è intero, le funzioni J ν (x) e J −ν (x) sono linearmente in<strong>di</strong>pendenti.Ciò segue dalla (II.35) in virtù del fatto chex νJ ν (x) =2 ν Γ(ν + 1) [1 + O(x2 )] , x → 0; ν ≠ −1, −2, −3, · · · ,(III.39)poichè Γ(ν + 1) è finito. Se, invece, ν = n è intero, si utilizzi il fatto che Γ(−k)è infinito per k = 0, 1, 2, · · · [ve<strong>di</strong> l’Appen<strong>di</strong>ce A] e quin<strong>di</strong> la sommatoria nellaserie (II.35) per J −n (x) inizia a k = n. Quin<strong>di</strong> per n = 0, 1, 2, . . . si haJ −n (x) =∞∑ (−1) k ( xΓ(k + n + 1)Γ(k + 1) 2∞∑k=nl=k−n=l=0) 2k−n(−1) l+n ( x) 2l+n= (−1) n J n (x).Γ(l + 1)Γ(l + n + 1) 2Dunque le funzioni J n (x) e J −n (x) sono linearmente <strong>di</strong>pendenti:J −n (x) = (−1) n J n (x).(III.40)Sono valide le seguenti relazioni <strong>di</strong> ricorrenza:J ′ ν(x) = J ν−1 (x) − ν x J ν(x) = −J ν+1 (x) + ν x J ν(x).(III.41)Infatti, la prima formula (II.41) segue dalla (II.35):J ν(x) ′ − J ν−1 (x)∞∑[(−1) k (2k + ν)( x) 2k+ν−1 (−1) k ( x) ] 2k+ν−1=−2Γ(k + ν + 1)Γ(k + 1) 2 Γ(k + ν)Γ(k + 1) 2k=0= − ν ∞∑ (−1) k ( x) 2k+ν ν = −x Γ(k + ν + 1)Γ(k + 1) 2 x J ν(x).k=051
Nello stesso modo si ottieneJ ν(x) ′ + J ν+1 (x)∞∑[(−1) k (2k + ν)( x) 2k+ν−1 (−1) k ( x) ] 2k+ν+1=+2Γ(k + ν + 1)Γ(k + 1) 2 Γ(k + ν)Γ(k + 1) 2k=0ν( x=2Γ(ν + 1) 2∞∑−=l=0) ν−1[ (−1) l (2l + ν + 2)2Γ(l + ν + 2)Γ(l + 2) −ν( x) ν−1 ν −2Γ(ν + 1) 2 x∞∑l=0(−1) l (x ) 2l+ν+1Γ(l + ν + 2)Γ(l + 1)]2(−1) l ( x) 2l+ν+1 ν =Γ(l + ν + 2)Γ(l + 2) 2 x J ν(x).Le formule (II.41) si possono riscrivere nella formaddx [xν J ν (x)] = x ν d [J ν−1 (x), x −ν J ν (x) ] = −x −ν J ν+1 (x).dxIn particolare per ν = 0 si trovaJ ′ 0(x) = −J 1 (x).Infine, sottraendo le formule (II.41), si ottiene ancora una relazione <strong>di</strong> ricorrenza:J ν+1 (x) − 2ν x J ν(x) + J ν−1 (x) = 0.4.2 Funzioni <strong>di</strong> Bessel <strong>di</strong> seconda specieIl Wronskiano W [u, v] = uv ′ − u ′ v <strong>di</strong> due soluzioni u e v dell’equazione <strong>di</strong>Bessel sod<strong>di</strong>sfa all’equazione <strong>di</strong>fferenziale <strong>di</strong> primo or<strong>di</strong>neW ′ [u, v](x) + 1 W [u, v](x) = 0,xe quin<strong>di</strong> W [u, v](x) è proporzionale alla funzione 1/x. Per trovare la costante<strong>di</strong> proporzionalità basta stu<strong>di</strong>are l’andamento del Wronskiano se x → 0. Perν /∈ Z si vede subito che⎧1( x) ν⎪⎨ J ν (x) =+ O(x ν+2 ),Γ(ν + 1) 2⎪⎩ xJ ν(x) ′ ν( x) ν=+ O(x ν+2 ),Γ(ν + 1) 2⎧1( x) −ν⎪⎨ J −ν (x) =+ O(x −ν+2 ),Γ(−ν + 1) 2⎪⎩ xJ −ν(x) ′ −ν( x) −ν=+ O(x −ν+2 ),Γ(−ν + 1) 252
e dunque [ve<strong>di</strong> la (A.10) nell’Appen<strong>di</strong>ce A]=W [J ν , J −ν ](x) =−2νxΓ(ν + 1)Γ(−ν + 1)−2νxΓ(ν + 1)Γ(−ν + 1) + O(x) } {{ }=0−2 sin(νπ)= .πxQuin<strong>di</strong> J ν (x) e J −ν (x) sono linearmente in<strong>di</strong>pendenti [cioè, il Wronskiano nonsi annulla per x ≠ 0] se e solo se ν non è un intero. Se ν ∈ Z, risultaJ −ν (x) = (−1) ν J ν (x).Per ν = n (n = 0, 1, 2, · · · ) esiste una soluzione dell’equazione <strong>di</strong> Bessellinearmente in<strong>di</strong>pendente della J n (x). Per trovarela definiamo la funzione <strong>di</strong>Bessel <strong>di</strong> seconda specieY ν (x) = J ν(x) cos(νπ) − J −ν (x)sin(νπ)per ν /∈ Z. Siccome sia il numeratore che il denominatore sono funzioni analitiche<strong>di</strong> ν ∈ C e (d/dν) sin(νπ) = π cos(νπ) ≠ 0 per ν = 0, 1, 2, · · · , il limite<strong>di</strong> Y ν (x) per ν → n ∈ N ∪ {0} esiste ed è uguale all’espressioneY n (x) = 1 π[ ] ∂Jν (x)∂νν=n− (−1) n [∂J−ν (x)∂ν].ν=nCalcolando la derivata della serie <strong>di</strong> potenza per J ν (x) rispetto a ν ed introducendola funzione ψ(z) = Γ ′ (z)/Γ(z) otteniamo per x ≥ 0Y 0 (x) = 2 ∞∑ (−1) k (z/2) 2k [log z ]π (k!) 2 2 − ψ(k + 1) k=0= 2 π J 0(x) log x 2 − 2 ∞∑ (−1) k (z/2) 2kψ(k + 1),π (k!) 2∑n−1Y n (x) = − 1 π+ 1 ∞∑πk=0k=0k=0(n − k − 1)!k!(−1) k (z/2) n+2kk!(n + k)!= 2 π J n(x) log x 2 − 1 π− 1 π∞∑k=0∑n−1k=0(−1) k (z/2) n+2kk!(n + k)!( z2) 2k−n[2 log z 2 − ψ(k + 1) − ψ(k + n + 1) ](n − k − 1)!k!( x2) 2k−n[ψ(k + 1) + ψ(k + n + 1)] .53
110.50.50−0.50−1−1.5−0.50 2 4 6 8 10x−20 2 4 6 8 10xFigura III.1: Panello sinistro: le funzioni <strong>di</strong> Bessel J ν (x), ν = 0, 1, 2, 3.Panello destro: le funzioni <strong>di</strong> Neumann Y ν (x), ν = 0, 1, 2, 3.Quest’espressione conduce alle rappresentazioni asintotiche per x → 0 +⎧2 ⎪⎨Y n (x) ∼ π log x 2 , n = 0(n − 1)!( x) −n (III.42)⎪⎩ − , n = 1, 2, · · · ,π 2implicando che |Y n (x)| → +∞ se x → 0.Per ragioni <strong>di</strong> linearità le funzioni <strong>di</strong> Bessel <strong>di</strong> seconda specie sod<strong>di</strong>sfanoalle stesse formule <strong>di</strong> ricorrenza <strong>di</strong> quelle <strong>di</strong> prima specie. In particolareY ′ν(x) = Y ν−1 (x) − ν x Y ν(x) = −Y ν+1 (x) + ν x Y ν(x);ddx [xν Y ν (x)] = x ν Y ν−1 (x),d [x −ν Y ν (x) ] = −x −ν Y ν+1 (x);dxY ′0(x) = −Y 1 (x); Y ν+1 (x) − 2ν x Y ν(x) + Y ν−1 (x) = 0.4.3 Ortogonalità e zeriLa seguente proposizione ci importa nei casi α = 1 e β = 0 (cercando gli zeri)e α = 0 e β = 1 (cercando i valori estremi).Proposizione III.4 Per α, β ≥ 0 con α + β > 0, siano µ 1 e µ 2 zeri realidell’equazioneαJ ν (µ) + βµJ ν(µ) ′ = 0,(III.43)54
dove ν > −1. Allora∫ 1xJ ν (µ 1 x)J ν (µ 2 x) dx0⎧0, µ 2 1 ≠ µ 2 2,⎪⎨ 1= 2 [J ν(µ ′ 1 )] 2 + 1 ) (1 − ν2J2 µ 2 ν (µ 1 ) 2 , µ 1 = µ 2 ,1⎪⎩ − 1 2 J ν(µ ′ 1 )J ν(−µ ′ 1 ) + 1 ) (1 − ν2J ν (µ 1 )J ν (−µ 1 ), µ 1 = −µ 2 .2µ 2 1(III.44)Dimostrazione. Siano µ 1 , µ 2 ∈ R. In virtù della (II.34), le funzioni J ν (µ 1 x)e J ν (µ 2 x) sod<strong>di</strong>sfano le equazioni[dx dJ ])ν(µ 1 x)+(µ 2dx dx1x − ν2J ν (µ 1 x) = 0,x[dx dJ ])ν(µ 2 x)+(µ 2dx dx2x − ν2J ν (µ 2 x) = 0.xMoltiplichiamo la prima per J ν (µ 2 x) e la seconda per J ν (µ 1 x), poi sottraiamotermine a termine la prima dalla seconda ed integriamo da 0 a 1. Si ottiene=∫ 1(µ 2 2 − µ 2 1)∫ 100[J ν (µ 2 x) ddxxJ ν (µ 1 x)J ν (µ 2 x) dx(x dJ )ν(µ 1 x)dx− J ν (µ 1 x) ddx(x dJ )]ν(µ 2 x)dxdx= [µ 1 xJ ν (µ 2 x)J ′ ν(µ 1 x) − µ 2 xJ ν (µ 1 x)J ′ ν(µ 2 x)] 1 x=0 . (III.45)Dalla (II.35) [ve<strong>di</strong> anche la (II.39)] abbiamo per x → 0 +J ν (µx) =e perciò1Γ(ν + 1)( µx) ν+O(x ν+2 ), µxJ ′2ν(µx) =νΓ(ν + 1)( µx) ν+O(x ν+2 ),2µ 1 xJ ν (µ 2 x)J ′ ν(µ 1 x) − µ 2 xJ ν (µ 1 x)J ′ ν(µ 2 x) = O(x 2ν+2 ), x → 0 + .Quin<strong>di</strong>, grazie alla con<strong>di</strong>zione ν > −1, il primo membro della (II.45) si annullaper x = 0 e si ottiene∫ 10xJ ν (µ 1 x)J ν (µ 2 x) dx = µ 1J ν (µ 2 )J ν(µ ′ 1 ) − µ 2 J ν (µ 1 )J ν(µ ′ 2 ). (III.46)µ 2 2 − µ 2 155
Se µ 1 e µ 2 sono zeri reali dell’equazione (II.43) dove α, β ≥ 0 e α + β > 0, ildeterminante del sistema lineareαJ ν (µ 1 ) + βµ 1 J ′ ν(µ 1 ) = 0, αJ ν (µ 2 ) + βµ 2 J ′ ν(µ 2 ) = 0,per (α, β) si annulla, cioè il numeratore della frazione nella (II.46) si annulla.Di conseguenza, se µ 2 1 ≠ µ 2 2, segue la proprietà <strong>di</strong> ortogonalità (cioè, si annullala parte a sinistra della (II.46)).Per <strong>di</strong>mostrare la (II.44) se µ 1 = µ 2 , si passi al limite per µ 2 → µ 1 nella(II.46) utilizzando la regola <strong>di</strong> De L’Hôpital:∫ 10xJ ν (µ 1 x) 2 µ 1 J ν (µ 2 )Jdx = limν(µ ′ 1 ) − µ 2 J ν (µ 1 )J ν(µ ′ 2 )µ 2 →µ 1 µ 2 2 − µ 2 1= 1 2 [J ν(µ ′ 1 )] 2 − 1 J ν (µ 1 ) [J2µν(µ ′ 1 ) + µ 1 J ′′1= 1 2 [J ′ ν(µ 1 )] 2 + 1 2 J ν(µ 1 ) 2 (1 − ν2µ 2 1).ν (µ 1 )]Abbiamo <strong>di</strong>mostrato la (II.44) per µ 1 = µ 2 . La <strong>di</strong>mostrazione per µ 1 = −µ 2 èanaloga.✷Dimostriamo ora le seguenti proprietà degli zeri dell’equazione (II.43) perν > −1. Per β = 0 quest’equazione definisce gli zeri delle funzioni <strong>di</strong> Bessel.Teorema III.5 Gli zeri dell’equazione (II.43) per ν > −1 sono reali, semplici,ad eccezione, forse, dello 0; questi zeri sono simmetricamente <strong>di</strong>sposte rispettoall’origine e non hanno punti <strong>di</strong> accumulazione.Dimostrazione. Dalla (II.35), in virtù del fatto che α, β e Γ(ξ) sono reali,per ξ reali, si ottiene J ν (x) = J ν (x). Quin<strong>di</strong>αJ ν (µ) + βµJ ′ ν(µ) = αJ ν (µ) + βµJ ′ ν(µ).Per questa ragione, se µ è uno zero dell’equazione (II.43), µ è anche’esso unosuo zero. Se µ 2 ≠ µ 2 , applicando la formula (II.44) per µ 1 = µ e µ 2 = µ, siarriva ad una contrad<strong>di</strong>zione:0 =∫ 10xJ ν (µx)J ν (µx) dx =∫ 10x|J ν (µx)| 2 dx.Ciò significa che µ 2 = µ 2 , cioè µ è un numero reale o immaginario. Ma quest’ultimocaso non ha luogo, poichè, in virtù della (II.35) e del fatto che Γ(ξ) > 0per ξ > 0, si ha per 0 ≠ a ∈ R( ) ν ia ∑ ∞αJ ν (ia) + i βaJ ν(ia) ′ α + β(2k + ν)( a) 2k=≠ 0.2 Γ(k + ν + 1)Γ(k + 1) 2k=056
Siccome µ −ν [αJ ν (µ) + βµJ ν(µ)] ′ è una funzione analitica <strong>di</strong> µ in tutto ilpiano complesso, i suoi zeri non si possono accumulare ad un punto finito.Dimostriamo ora la semplicità degli zeri. Sia µ 0 > 0 uno zero della (II.43)<strong>di</strong> moltiplicità 2, in modo che⎧⎨αJ ν (µ 0 ) + βµ 0 J ν(µ ′ 0 ) = 0,)⎩αJ ν(µ ′ 0 ) + βJ ν(µ ′ 0 ) + βµ 0 J ν ′′ (µ 0 ) = −β(µ 0 − ν2J ν (µ 0 ) + αJµν(µ ′ 0 ) = 0,0(III.47)in virtù dell’equazione (II.34). Dalla (II.47) [che è un sistema <strong>di</strong> equazionilineari per J ν (µ 0 ) e J ν(µ ′ 0 )] conclu<strong>di</strong>amo che a) J ν (µ 0 ) = J ν(µ ′ 0 ) = 0, oppureb) α 2 + β 2 (µ 2 0 − ν 2 ) = 0. Il caso a) è impossibile grazie al teorema sull’unicitàdella soluzione della (II.34), poichè µ 0 > 0 non è un punto singolare dell’equazione(II.34). Dimostriamo che è anche impossibile il caso b). Per realizzare ilcaso b) ci vuole β > 0 e (α/β) = √ ν 2 − µ 2 0, dove 0 < µ 0 ≤ |ν|. Sostituendoquest’equazione nella (II.47) si ottiene( )[J ν(µ ′ 0 )] 2 ν2= − 1 J ν (µ 0 ) 2 ,il che, in virtù della (II.44), porta all’uguaglianza contrad<strong>di</strong>ttoria∫ 1xJ ν (µ 0 x) 2 dx = 1 {) }[J ′2ν(µ 0 )] 2 +(1 − ν2J ν (µ 0 ) 2 = 0.0Il teorema è stato <strong>di</strong>mostrato.µ 2 0In base al teorema <strong>di</strong>mostrato si possono numerare gli zeri dell’equazione(II.43), <strong>di</strong>sponendole in or<strong>di</strong>ne crescente:µ 2 00 < µ (ν)1 < µ (ν)2 < µ (ν)3 < · · · .Se ν > 0, J ν (x) si annulla per x = 0.Abbiamo la seguente espressione asintotica per la funzione J ν (x): 3J ν (x) =√2(xπx cos − π 2 ν − π )+ O(x −3/2 ), x → +∞. (III.48)4Ne segue la formula approssimativa per gli zeri <strong>di</strong> J ν (x):µ (ν)k≈ 3π 4 + π ν + kπ, k → +∞.2La <strong>di</strong>mostraziona della formula asintotica (II.48) si trova nell’Appen<strong>di</strong>ce C.3 Ve<strong>di</strong> l’Appen<strong>di</strong>ce C per le <strong>di</strong>mostrazioni.✷57
4.4 Altre funzioni cilindricheInsieme con le funzioni <strong>di</strong> Bessel J ν (x), sono importanti per le applicazionialtri tipi <strong>di</strong> funzioni cilindriche. Queste funzioni sono le seguenti:1. Le funzioni <strong>di</strong> Neumann o le funzioni <strong>di</strong> Bessel <strong>di</strong> seconda specie⎧J ν (x) cos(νπ) − J −ν (x), ν /∈ Z⎪⎨ [ sin(νπ)Y ν (x) = 1 ∂Jν (x)− (−1) n ∂J ]−ν(x), ν = n = 0, 1, 2, · · ·π ∂ν∂νν=n⎪⎩(−1) n Y n (−x), ν = −n = −1, −2, · · · .Spesso si vede la notazione N ν (x) invece <strong>di</strong> Y ν (x).2. Le funzioni <strong>di</strong> Hankel <strong>di</strong> prima speciee le funzioni <strong>di</strong> Hankel <strong>di</strong> seconda specieH (1)ν (x) = J ν (x) + i Y ν (x) (III.49)H (2)ν (x) = J ν (x) − i Y ν (x). (III.50)3. Le funzioni <strong>di</strong> Bessel <strong>di</strong> argomento immaginarioI ν (x) = e −νπi/2 J ν (ix),K ν (x) = πi2 eπνi/2 H (1)ν (ix). (III.51)Le funzioni I ν (x) si chiamano funzioni <strong>di</strong> Bessel mo<strong>di</strong>ficate <strong>di</strong> prima specie (mo<strong>di</strong>fiedBessel functions of the first kind), mentre le funzioni K ν (x) si chiamanofunzioni <strong>di</strong> MacDonald. 4Utilizzando l’espressione asintotica (II.48) per J ν (x), si ha per x → +∞H (1)ν (x) =H (2)ν (x) =Y ν (x) =I ν (x) =√2√2πx eiπx e−ix− π2 ν − π 4!+ O(x −3/2 ), (III.52)πx− 2 ν − π !4 + O(x −3/2 ), (III.53)√2πx sin (x − π 2 ν − π 4ex√2πx[1 + O(x −1 ) ] ,)+ O(x −3/2 ), (III.54)(III.55)K ν (x) =√ π2x e−x [ 1 + O(x −1 ) ] . (III.56)4 Nella letteratura ci sono <strong>di</strong>versi nomi e notazioni per queste funzioni. In particolare, in[21] si utilizza una definizione <strong>di</strong>versa della nostra.58
3025201510587654321000 1 2 3 4 5 1 2 3 4 5 6xxFigura III.2: Panello sinistro: le funzioni <strong>di</strong> Bessel immaginarie I ν (x) perν = 0, 1, 2, 3. Panello destro: le funzioni <strong>di</strong> MacDonald K ν (x)per ν = 0, 1, 2, 3.Le <strong>di</strong>mostrazioni delle formule asintotiche (II.52)-(II.56) si trovano nell’Appen<strong>di</strong>ceC. Analogamente, utilizzando la (II.39), si ottiene per x → 0 +⎧H ⎪⎨(1)0 (x) ≈ − 2iπ ln 1 x , H(2) 0 (x) ≈ 2iπ ln 1 x ,⎪⎩ Y 0 (x) ≈ − 2 π ln 1 x , K 0(x) ≈ ln 1 x .Calcoliamo oraπ2 (I −ν(z) − I ν (z)) = π (e νπi/2 J −ν (iz) − e −νπi/2 J ν (iz) )2= π ( 2 eνπi/2 J −ν (iz) − e −νπi J ν (iz) )= π 2 eνπi/2 (−[J ν (iz) cos(νπ) − J −ν (iz)] + i sin(νπ)J ν (iz))= π 2 eνπi/2 sin(νπ) (J ν (iz) + iY ν (iz))= πi2 eνπi/2 H ν(1) (iz) sin(νπ) = K ν (z) sin(νπ),implicando che 5 K ν (z) = π 2I −ν (z) − I ν (z).sin(νπ)5 In [21, Sec. 17.71] la funzione <strong>di</strong> MacDonald K ν (z) viene definita in modo <strong>di</strong>verso:K ν (z) = π 2 (I −ν(z) − I ν (z)) cot(νπ).59
Per ν = n ∈ Z bisogna calcolare il limite se ν → n.Troviamo ora le equazioni <strong>di</strong>fferenziali per le funzioni I ν (x) e K ν (x). Sostituendox ↦→ ix nella (II.34), otteniamo l’equazione <strong>di</strong>fferenzialex 2 u ′′ + xu ′ − (x 2 + ν 2 )u = 0.(III.57)Dal Teorema II.5 segue che per ν > −1 le funzioni <strong>di</strong> Bessel immaginarie I ν (x)e le loro derivate prime non hanno zeri reali (con l’eccezione <strong>di</strong> x = 0 se ν > 0).4.5 Funzioni sferiche <strong>di</strong> BesselLe funzioni <strong>di</strong> Bessel J ±(l+1)(x), dove l = 0, 1, 2, . . ., appaiono nello stu<strong>di</strong>o dello2scattering quantistico e dello scattering della luce. Per questo motivo vengonointrodotte le seguenti funzioni:√ π2z J l+ 1 (z),2j l (z) =√ πy l (z) = (−1) l+1 n l (z) =2z Y l+ 1 (z),2√ π2z H(1) (z),l+ 1 2h (1)l(z) = j l (z) + iy l (z) =h (2)l(z) = j l (z) − iy l (z) =√ π2z H(2) (z).l+ 1 2(III.58)(III.59)(III.60)(III.61)Le funzioni j l (z), y l (z) = (−1) l+1 n l (z) e h (1,2)l(z) si <strong>di</strong>cono funzioni sferiche <strong>di</strong>Bessel <strong>di</strong> prima, seconda e terza specie. Quin<strong>di</strong>Si vede facilmente chej 0 (z) = sin(z) ,zj 1 (z) = sin(z) − cos(z) ,( z 2 z3j 2 (z) =z − 1 )sin(z) − 3 3 z z cos(z),2y 0 (z) = −n 0 (z) = − cos(z) ,zy 1 (z) = n 1 (z) = − cos(z) − sin(z) ,( z 2 zy 2 (z) = −n 2 (z) = − 3 z + 1 )cos(z) − 3 3 z z sin(z).2y l (z) = (−1) l+1 n l (z) = (−1) l+1 j −l−1 (z).(III.62)60
È anche abbastanza facile trovare le seguenti espressioni esplicite:(j l (z) = z l − 1 ) l (d sin(z), y l (z) = (−1) l+1 n l (z) = −z l − 1 ) ld cos(z).z dz zz dz z(III.63)Asintoticamente (se x → +∞) abbiamo le seguenti espressioni:⎧⎪⎨ l/2sin(x)(−1)j l (x) ≃x , l pari,⎪⎩cos(x)(III.64)(−1) l+12 , l <strong>di</strong>spari,x ⎧⎪⎨ (l+2)/2cos(x)(−1) , l pari,y l (x) = (−1) l+1 n l (z) ≃x⎪⎩sin(x)(III.65)(−1) l+12x , l <strong>di</strong>spari, ⎧⎪⎨ l/2eix−i(−1)h (1)l(x) ≃x , l pari,⎪⎩ e ix(III.66)(−1) l+12x , l <strong>di</strong>spari, ⎧⎪⎨ l/2e−ixi(−1)h (2)l(x) ≃x , l pari,⎪⎩ e −ix(III.67)(−1) l+12x , l <strong>di</strong>spari.Sostituendo y = √ x Y nell’equazione <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne ν = l + 1 2all’equazione <strong>di</strong>fferenzialeY ′′ + 2 x Y ′ +( )l(l + 1)1 − Y = 0x 2si arriva(III.68)per le funzioni j l , y l = (−1) l+1 n l , h (1)le h (2)l. Ponendo Y = Z/x si ha inoltre( )Z ′′ l(l + 1)+ 1 − Z = 0(III.69)x 2per le funzioni xj l (x), xy l (x) = (−1) l+1 xn l (x), xh (1)l(x) e xh (2)l(x).5 Funzioni sfericheConsideriamo adesso una classe <strong>di</strong> funzioni speciali molto importante per lafisica matematica.61
5.1 Funzioni sfericheSi <strong>di</strong>ce funzione sferica <strong>di</strong> or<strong>di</strong>ne l = 0, 1, 2, · · · ogni polinomio armonico 6omogeneo <strong>di</strong> grado l considerato sulla sfera unitaria S n−1 ⊂ R n . Dunque, trale funzioni sferiche Y l (s), s ∈ S n−1 , <strong>di</strong> or<strong>di</strong>ne l ed i polinomi armonici omogeneiu l (x), x ∈ R n , stabilisce una corrispondenza biunivoca l’identitàY l (s) = u l( x|x|)= u l(x)|x| l , s = x|x| ,(III.70)dove ∆u l = 0.Le funzioni sferiche Y l e Y l ′, <strong>di</strong> or<strong>di</strong>ni <strong>di</strong>versi sono ortogonali in L 2 (S n−1 ),cioè∫(Y l , Y l ′) = Y l (s)Y l ′(s) ds = 0, l ≠ l ′ .S n−1Infatti, applicando per la sfera la formula <strong>di</strong> Green ai polinomi armonici( )( )xxu l (x) = |x| l Y l , u l ′(x) = |x| l′ Y l ′ ,|x||x|si ottiene[0 = |x|∫R l′ Y l ′∆ ( ) ( )]|x| l Y l − |x| l Y l ∆ |x| l′ Y l ′ dxn[]∂(|x|= |x|∫S l Y l′ l )Y l ′ − |x| l ∂(|x| l′ Y l ′)Y l ds∂n∂nn−1[]∂(r= Y l ′∫S l ∫Y l ) ∂(r l′ Y l ′)− Y l ds = (l − l ′ )∂r ∂rn−1S n−1Y l (s)Y l ′(s) ds,come volevasi <strong>di</strong>mostrare.Consideriamo ora le funzioni sferiche sulla circonferenza S 1 (n = 2). Incoor<strong>di</strong>nate polari abbiamou l (x) = r l Y l (θ),x = (r cos θ, rsen θ),dove ∆u l = 0. Risulta l’equazione <strong>di</strong>fferenzialeY ′′l (θ) + l 2 Y l (θ) = 0,da cui seguono le funzioni trigonometriche{costante, l = 0Y l (θ) =c 1 cos(lθ) + c 2 sen (lθ), l = 1, 2, 3, · · · .6 Una funzione v = v(x 1 , . . . , x n ) <strong>di</strong> classe C 2 si <strong>di</strong>ce armonica se ∆v = ∑ nj=1 ∂2 v= 0.∂x 2 j62
Consideriamo ora le funzioni sferiche sulla sfera S 2 (n = 3). In coor<strong>di</strong>natesferiche abbiamo per y l (x) = r l Y l (θ, ϕ)( )1 ∂ 1 ∂Y l+ 1 ∂ 2 Y lsen ϕ ∂ϕ sen ϕ ∂ϕ sen 2 ϕ ∂θ + l(l + 1)Y l(θ, ϕ) = 0, (III.71)2dove θ ∈ [0, 2π], ϕ ∈ [0, π] e l = 0, 1, 2, · · · . Cerchiamo le soluzioni della (II.71)in C ∞ (S 2 ). Introduciamo prima ξ = cos ϕ e scriviamo (II.71) nella forma1 ∂ 2 Y l1 − ξ 2 ∂θ + ∂ ((1 − ξ 2 ) ∂Y )l+ l(l + 1)Y 2l (θ, ξ) = 0. (III.72)∂ξ ∂ξApplicando la separazione delle variabiliY l (θ, ϕ) = P(ξ)Θ(θ),otteniamoΘ(θ) ={costante, m = 0c 1 cos mθ + c 2 sen mθ, m = 1, 2, 3, · · · ,dove abbiamo sfruttato la perio<strong>di</strong>cità della Θ(θ): Θ(θ + 2π) ≡ Θ(θ). DunqueΘ ′′ (θ) = −m 2 Θ(θ). Risulta l’equazione <strong>di</strong>fferenziale(d(1 − ξ 2 ) dP )]+[l(l + 1) − m2P(ξ) = 0. (III.73)dξ dξ1 − ξ 2Quest’equazione si può scrivere nella forma− [ (1 − ξ 2 )P ′] ′+m 2P = l(l + 1)P.1 − ξ2 Le soluzioni <strong>di</strong> quest’equazione nei punti ±1 debbono assumere valori finiti.5.2 Polinomi <strong>di</strong> LegendreI polinomi <strong>di</strong> Legendre P l (ξ) si possono definire nei seguenti mo<strong>di</strong>:1. tramite la formula generatrice1√ = ∑ ∞1 − 2ξh + h22. tramite l’equazione <strong>di</strong>fferenziale,l=0P l (ξ)h l , |h| < 1,−[(1 − x 2 )P ′l ]′ (x) = l(l + 1)P l (x), − 1 < x < +1; P l (1) = 1,63
10.50−0.5−1−1 −0.5 0 0.5 1xFigura III.3: I polinomi <strong>di</strong> Legendre <strong>di</strong> grado 1, 2, 3 e 4. Si osservi che ilnumero degli zeri è uguale al grado del polinomio.3. tramite l’ortogonalità: P l (ξ) sono i polinomi in ξ <strong>di</strong> grado l con coefficienteprincipale positivo tali che∫ 1−12P l (ξ)P l ′(ξ) dξ = δ ll ′2l + 1 ,4. tramite la formula <strong>di</strong> Rodrigues5. tramite la formula <strong>di</strong> ricorrenzaP l (ξ) = 1 ( ) l d(ξ 2 − 1) l ,2 l l! dξ(2l + 1)ξP l (ξ) = (l + 1)P l+1 (ξ) + lP l−1 (ξ), P 0 (ξ) = 1, P 1 (ξ) = ξ.Noi <strong>di</strong>mostriamo l’equivalenza tra queste definizioni.4 ⇒ 2. Consideriamo l’equazione <strong>di</strong>fferenziale− [(1 − x 2 )u ′ ] ′ (x) = λu(x), −1 < x < +1, (III.74)sotto le con<strong>di</strong>zioni iniziali che i limiti <strong>di</strong> u(x) per x → ±1 esistano finiti.Questo problema al contorno ha soluzioni polinomiali per λ = l(l + 1) dovel = 0, 1, 2, · · · . Verifichiamo se i polinomiP l (x) = 12 l l!( ddx) l(x 2 − 1) l , l = 0, 1, 2, · · · , (III.75)64
sod<strong>di</strong>sfano la (II.74) per λ = l(l + 1). Questi polinomi (<strong>di</strong> grado l) sono dettipolinomi <strong>di</strong> Legendre e la (II.75) si <strong>di</strong>ce formula <strong>di</strong> Rodrigues. Infatti, 7 ponendoW l (x) = (x 2 − 1) l e derivando l’identitàl + 1 volte, si ottiene(x 2 − 1)W (l+2)ls=0(x 2 − 1)W ′l (x) − 2l xW l (x) = 0(x) + 2xW (l+1)l(x) − l(l + 1)W (l)l(x) = 0.Dunque la funzione W (l)l(x) = 2 l (l!)P l (x) sod<strong>di</strong>sfa l’equazione (II.74). Inoltre,P l (x) = 1 l∑( ) (( ) s ) ( ( ) )l−s l dd(x − 1) l (x + 1) l2 l l! s dxdxs=0= 1 l∑( ) ( )l!l!2 l l! (l − s)! (x − 1)l−s s! (x + 1)s ,il quale implica che P l (1) = 1 e P l (−1) = (−1) l .2 ⇒ 4. Sostituendo u(x) = P l (x)z(x) e w(x) = z ′ (x) nella (II.74) conλ = l(l + 1), otteniamo l’equazione separabileimplicando chew ′ (x)′w(x) = −2P l (x)P l (x) + 2x1 − x , 2∫ xdty(x) = c 1 P l (x) + c 2 P l (x)0 (1 − t 2 )P l (t) . 2L’integrale nell’ultima espessione è <strong>di</strong>vergente in x = ±1 (poichè P l (±1) 2 = 1].Quin<strong>di</strong> P l (x) è l’unica soluzione dell’equazione <strong>di</strong>fferenziale (II.74) con λ =l(l + 1) che sod<strong>di</strong>sfa P l (1) = 1. Siccome la formula <strong>di</strong> Rodrigues rappresentauna tale soluzione, si ottiene questa formula dalla proprietà 2.(2 + 4) ⇒ 3. Si <strong>di</strong>mostra facilmente che i polinomi <strong>di</strong> Legendre sonoortogonali nello spazio L 2 (−1, 1). Infatti, utilizzando la (II.74) si ha=[l(l + 1) − k(k + 1)]∫ 1= −−1∫ 1∫ 1−1[P l (k) [ (1 − x 2 )P ′ k−1P l (x)P k (x) dx] ′− Pk (x) [ (1 − x 2 )P ′l] ] ′dx[P′l (k)(1 − x 2 )P ′ k(x) − P ′ k(x)(1 − x 2 )P ′l (x) ] dx = 0,7 Vale la formula <strong>di</strong> Leibnitz (fg) (m) = ∑ m( m)j=0 j f (j) g (m−j) . Quin<strong>di</strong> (xf) (m) = xf (m) +mf (m−1) e ((x 2 − 1)f) (m) = (x 2 − 1)f (m) + 2mxf (m−1) + m(m − 1)f (m−2) .65
dopo un’integrazione per parti. Quin<strong>di</strong> (P l , P k ) = ∫ 1−1 P l(x)P k (x) dx = 0 sel ≠ k. Per trovare il fattore <strong>di</strong> normalizzazione, calcoliamo (P l , P l ) tramite lintegrazioni per parti consecutive. Otteniamo(P l , P l ) = 1 ∫ 1( ) l dP2 l l (x) (x 2 − 1) ll! −1 dx⎧[= 1 ⎨ ( ) ] ⎫l−11 ∫ d1( ) l−1 d⎬P2 l l (x) (x 2 − 1) l − P l ′ (x) (x 2 − 1) l dxl! ⎩ dx−1 dx⎭−1⎧ ⎡P (l)l−1costante⎤1contiene il fattore (x 2 −1) k= 1 ⎪⎨ l∑( ) l−k ⎢2 l l! ⎣ (−1)k−1 P (k−1) dl(x) (x 2 − 1) l⎥dx⎦k=1 ⎪⎩} {{ }−1⎫∫ 1⎬+ (−1) l (x)(x 2 − 1) l dx} {{ } ⎭ = 1 ∫ 12 l l! P (l)l(1 − x 2 ) l dx.−1Inoltre,P (l)l(x) = 1 ( ) 2l d(x 2 − 1) l = 1 ( ) 2l dx 2l = (2l)!2 l l! dx2 l l! dx 2 l l! .Applicando la formula <strong>di</strong> ricorrenza (I l−1 /I l ) = 1 + (1/2l) and I 0 = 2 perl’integrale I l = ∫ 1(1 − −1 x2 ) l dx per arrivare all’espressione I l = 2 l+1 l!/(2l + 1)!![essendo (2l + 1)!! def= 1.3.5. . . . .(2l − 1)(2l + 1)], si ottiene infineQuin<strong>di</strong>(P l , P l ) = 1 (2l)!2 l l! 2 l l!√l + 1 2 P l(x) ha norma 1 in L 2 (−1, 1).2 l+1 l(2l + 1)!! = 22l + 1 .(3 + 4) ⇒ 5. Per trovare una formula <strong>di</strong> ricorrenza per i polinomi <strong>di</strong>Legendre calcoliamo prima il prodotto scalare (P l+1 , xP l ). Infatti, dopo l + 1integrazioni per parti consecutive e utilizzando (x f) (l+1) = x f (l+1) +(l+1) f (l)66
si ottiene∫ 1(−1) l+1(P l+1 , xP l ) =(x 2 − 1) l+1 ×2 2l+1 · ((l + 1)!)(l!) −1[ ( ) 2l+1 ( ) ]2l dd× x (x 2 − 1) l + (l + 1) (x 2 − 1) l dxdxdx∫ 1( ) 2l= (−1)l+1d(x 2 − 1) l+1 (x 2 − 1) l dx2 2l+1 · (l!) 2 −1dx∫1 1( ) 2l d=(1 − x 2 ) l+1 (x 2 − 1) l dx2 2l+1 · (l!) 2 dx=−1(2l)! 2 l+2 · (l + 1)!2 2l+1 · (l!) 2 (2l + 3)(2l + 1) · · · 3 · 1 = 2(l + 1)(2l + 1)(2l + 3) .Siccome i polinomi <strong>di</strong> Legendre sono ortogonali, essi sono linearmente in<strong>di</strong>pendenti.Dunque∞∑(2l + 1)xP l (x) = a j P j (x),dove a j = 0 per j > l + 1 [poichè xP l (x) ha grado l + 1]. Risultano (2l +1)(xP l , P j ) = (2l + 1)(P l , xP j ) = 0 per l < j − 1 [poichè xP j (x) ha grado < l]e (2l + 1)(xP l , P l ) = 0 [poichè xP l (x) 2 è una funzione <strong>di</strong>spari]. Quin<strong>di</strong>Infine troviamoj=0(2l + 1)xP l (x) = a l+1 P l+1 (x) + a l−1 P l−1 (x).(2l + 1)(xP l , P l+1 ) = a l+1 (P l+1 , P l+1 ) = a l+1 (2/(2l + 3));(2l + 1)(xP l−1 , P l ) = a l−1 (P l−1 , P l−1 ) = a l−1 (2/(2l − 1)).Quin<strong>di</strong> a l+1 = l + 1 e a l−1 = l. Risulta la formula <strong>di</strong> ricorrenza(2l + 1)xP l (x) = (l + 1)P l+1 (x) + l P l−1 (x), P 0 (x) = 1, P 1 (x) = x.(III.76)Per induzione matematica si <strong>di</strong>mostrano facilmenteP l (1) = 1, P l (−1) = (−1) l , P l (−x) = (−1) l P l (x);− 1 ≤ P l (x) ≤ +1, −1 ≤ x ≤ +1. (III.77)5 ⇒ 1. Dimostriamo ora la formula generatrice∞∑P l (x)h l =l=01√ , |h| < 1. (III.78)1 − 2xh + h267
Infatti, scriviamo F (x, h) per la parte a sinistra della (II.78). Per |h| < 1 èpermessa la derivazione termine a termine rispetto ad h, grazie alla (II.77). Sitrovano facilmente le seguenti espressioni:∞∑∞∑(2l + 1)xP l (x)h l = xF (x, h) + 2xhl=0∞∑(l + 1)P l+1 (x)h l =l=0∞∑l P l−1 (x)h l = h 2l=1l=0∞∑l P l (x)h l−1 =l=1∑ ∞l=1= h 2 ∂F∂hApplicando la (II.76) si hal P l (x)h l−1 = xF (x, h) + 2xh ∂F∂h ;∞∑l=0(l − 1)P l−1 (x)h l−2 + h+ hF (x, h).xF (x, h) = (1 − 2xh + h 2 ) ∂F∂hdove F (x, 0) = P 0 (x) = 1. Oppure:∂F/∂hF (x, h) =l P l (x)h l−1 = ∂F∂h ;∞∑P l−1 (x)h l−1l=1+ hF (x, h),x − h, F (x, 0) = 1.1 − 2xh + h2 La soluzione unica <strong>di</strong> questo problema <strong>di</strong> Cauchy è la funzione F (x, h) datadalla parte a destra della (II.78).1 ⇒ 2. Scrivendo F (x, h) per la parte a destra nella (II.78) risulta (dopoalcuni calcoli)In altre parole,(∂(1 − x 2 ) ∂∂x ∂x(∂(1 − x 2 ) ∂F ) ( ) 2 ∂= −h (hF (x, h)) .∂x ∂x ∂h)∞∑∞∑P l (x)h l = − l(l + 1)P l (x)h l .l=0Ciò implica l’equazione <strong>di</strong>fferenziale. Infine, sostituendo x = 1 nella (II.78) siha∞∑P l (1)h l 1= √ = 1(1 − h)2 1 − h ,implicando P l (1) = 1.l=068l=0
5.3 Funzioni <strong>di</strong> Legendre associateSostituiamo P(ξ) = (1 − ξ 2 ) m/2 z(ξ) nella (II.73). Risulta(1 − ξ 2 )z ′′ (ξ) − 2(m + 1)ξz ′ (ξ) + (l − m)(l + m + 1)z(ξ) = 0. (III.79)Moltiplicando la (II.79) per (1 − ξ 2 ) m , otteniamo per P = P l[ ](1 − ξ 2 ) m+1 P l′ ′= −(l − m)(l + m + 1)(1 − ξ 2 ) m P l . (III.80)Per m = 0 risulta l’equazione <strong>di</strong>fferenziale per il polinomio <strong>di</strong> Legendre <strong>di</strong>grado l:(1 − ξ 2 )P l ′′ (ξ) − 2ξP l ′ (ξ) + l(l + 1)P l (ξ) = 0.Calcolando la derivata m-esima z = P (m)l<strong>di</strong> quest’equazione otteniamo(1 − ξ 2 )z ′′ (ξ) − 2(m + 1)z ′ (ξ) + (l − m)(l + m + 1)z(ξ) = 0.Quin<strong>di</strong> le funzioni (d/dξ) m P l (ξ) sono soluzioni della (II.79). Moltiplicando la(II.80) per P l ′(ξ) e la (II.80) con l ′ invece <strong>di</strong> l per P l (ξ) e sottraendo, otteniamo[(l − l ′ )(l + l ′ + 1)] (1 − ξ 2 ) m P l (ξ)P l ′(ξ) = P l (ξ) [ (1 − ξ 2 ) m+1 P ′ l ′ ] ′− P l ′(ξ) [ (1 − ξ 2 ) m+1 P ′ l] ′.Integrando quest’equazione tra −1 e +1 e applicando l’integrazione per partirisulta∫ 1[(l − l ′ )(l + l ′ + 1)] (1 − ξ 2 ) m P l (ξ)P l ′(ξ) dξ = 0.−1Quin<strong>di</strong>, se P l (ξ) sono i polinomi <strong>di</strong> Legendre, i polinomi (d/dξ) m P l+m (ξ) (l =0, 1, 2, · · · ) costituiscono un sistemi <strong>di</strong> polinomi ortogonali (<strong>di</strong> grado l) rispettoal peso w(ξ) = (1 − ξ 2 ) m .Troviamo ora la costante <strong>di</strong> normalizzazione. Si ha∫ 1[=−1(1 − ξ 2 ) m P (m)l(1 − ξ 2 ) m P (m)l(ξ)P (m) (ξ) dξl ′(ξ)P (m−1)l ′] 1∫ 1(ξ) −−1 −1∫ 1= (l − m − 1)(l + m) (1 − ξ 2 ) m−1 P (m−1)l−1= (l + m)(l − m + 1)(l + m − 1)(l − m + 2)××=∫ 1−1(1 − ξ 2 ) m−2 P (m−2)l(l + m)!(l − m)!∫ 1−1(ξ)P (m−2)l(ξ) dξ′[′P (m−1)l(ξ) (1 − ξ 2 ) m P (m)′l(ξ)]dξ(ξ)P (m−1)l(ξ) dξ′P l (ξ)P l ′(ξ) dξ = 2 (l + m)!2l + 1 (l − m)! δ l.l ′.69
Quin<strong>di</strong>( 2(l + m) + 121/2 ( ) ml! dP l+m (ξ), l = 0, 1, 2, · · · ,(l + 2m)!)dξè il sistema ortonormale dei polinomi rispetto al peso (1−ξ 2 ) m [con coefficiente<strong>di</strong> ξ l positivo].5.4 Le funzioni sferiche per n = 3: CompletezzaNella letteratura ci sono <strong>di</strong>verse normalizzazioni delle funzioni sferiche in R 3 .Qui ne scegliamo una. PoniamoY ml (ϕ, θ) ={Pl m (cos ϕ)(sen ϕ) m cos(mθ), m = 0, 1, · · · , l;P |m|l(cos ϕ)(sen ϕ) |m| sen (|m|θ), m = −1, −2, · · · , −l,dove l = 0, 1, 2, · · · . Le funzioni sferiche Ylm (m = 0, ±1, · · · , ±l) <strong>di</strong> or<strong>di</strong>ne lsono linearmente in<strong>di</strong>pendenti e le loro combinazioni lineariY l (s) =l∑m=−la (m)lYlm(s)a coefficienti arbitrari a (m)lsono anch’esse funzioni sferiche <strong>di</strong> or<strong>di</strong>ne l.Le funzioni sferiche {Ylm } formano un sistema ortogonale e completo inL 2 (S 2 ), ed inoltreInfatti,‖Yl m ‖ 2 ==∫ 1−1∫ π ∫ 2π00‖Y ml ‖ 2 L 2 (S 2 ) = 2π 1 + δ 0,m2l + 1|Y mlP |m|l(ξ) 2 (1 − ξ 2 ) m dξ(θ, ϕ)| 2 dθ dϕ∫ 2π0{ } cos 2 mθsen 2 mθ(l + |m|)!l − |m|)! .dθ = 2π 1 + δ 0,m2l + 1l + |m|)!(l − |m|)! .La completezza <strong>di</strong> un sistema ortogonale <strong>di</strong> funzioni sferiche {Ylm } significache ogni funzione f appartenente a L 2 (S 2 ) può essere sviluppata in serie <strong>di</strong>Fourier <strong>di</strong> queste funzioni:f(s) =∞∑ l∑l=0 m=−la (m)lYl m (s) =70∞∑Y l (s),l=0
convergente in L 2 (S 2 ). I coefficienti a (m)lsono calcolati me<strong>di</strong>ante la formulaa (m)l=2l + 1 (l − |m|)!2π(1 + δ 0,m ) (l + |m|)!∫ π ∫ 2π00f(θ, ϕ)Ylm (θ, ϕ)sen ϕ dθ dϕ.Le funzioni sferiche Ylm , m = 0, ±1, · · · , ±l, sono le autofunzioni del cosiddettooperatore <strong>di</strong> Beltrami,defL B = − 1sen ϕ∂∂ϕ(sen ϕ ∂ )− 1∂ϕ∂ 2sen 2 ϕ ∂θ , 2che corrisponde all’autovalore λ = l(l + 1) <strong>di</strong> moltiplicità 2l + 1.6 Polinomi <strong>di</strong> HermiteStu<strong>di</strong>amo ora l’equazioneu ′′ + (2ν + 1 − z 2 )u = 0,(III.81)dove u, z e ν non hanno più lo stesso significato come prima. Sostituendou = e −z2 /2 v,(III.82)risulta l’equazionev ′′ − 2zv ′ + 2νv = 0.(III.83)Per ν = 0, 1, 2, . . . la (II.83) si <strong>di</strong>ce equazione <strong>di</strong>fferenziale <strong>di</strong> Hermite. Lesoluzioni della (II.81) si <strong>di</strong>cono funzioni parabolico-cilindriche.Sostituendo v(z) = ∑ ∞l=0 c lz l nella (II.83) si trova la seguente espressioneper il coefficiente <strong>di</strong> z l :(l + 2)(l + 1)c l+2 + 2(ν − l)c l = 0. (III.84)La (II.84) è una relazione <strong>di</strong> ricorrenza che ci consente a calcolare tutti icoefficienti c l dai coefficienti c 0 = v(0) e c 1 = v ′ (0). Si vede facilmenteche esistono soluzioni polinomiali se e solo se ν = n = 0, 1, 2, . . .. Talisoluzioni hanno la proprietà v(−z) = (−1) n v(z) e hanno il grado n (cioè,c n+2 = c n+4 = c n+6 = . . . = 0).Definiamo oraH n (z) = (−1) n e z2 ( ddz) n{e −z2 }. (III.85)71
Allora H n (z) è un polinomio <strong>di</strong> grado n, ha il coefficiente principale positivo esod<strong>di</strong>sfa H n (−z) = (−1) n H n (z). Derivando l’equazione w ′ + 2zw = 0 (che hala soluzione w(z) ∼ e −z2 ) n + 1 volte e ponendo u = w (n) risultau ′′ + 2zu ′ + 2(n + 1)u = 0.Poi si sostituisca u = e −z2 v. Infine risulta l’equazione (II.83) per ν = n:v ′′ − 2zv ′ + 2nv = 0.(III.86)In altre parole, il polinomio <strong>di</strong> Hermite H n (z) sod<strong>di</strong>sfa l’equazione <strong>di</strong>fferenziale<strong>di</strong> Hermite (II.86). La (II.85) si <strong>di</strong>ce formula <strong>di</strong> Rodriguez.Scriviamo ora la (II.83) nella formaAllora(e −z2 v ′ ) ′ = −2n e −z2 v.2(n − m)H n (z)H m (z)e −z2 = (e −z2 H ′ m) ′ H n (z) − (e −z2 H ′ n) ′ H m (z).Calcolando l’integrale rispetto a z si ottiene∫ ∞[2(n − m) H n (z)H m (z)e −z2 dz = e −z2 (H m(z)H ′ n (z) − H n(z)H ′ m (z))−∫ ∞−∞−∞()e −z2 H m(z)H ′ n(z) ′ − e −z2 H n(z)H ′ m(z)′ dz = 0.] ∞z=−∞Quin<strong>di</strong> i polinomi <strong>di</strong> Hermite formano un sistema ortogonale nello spazio <strong>di</strong>Hilbert L 2 (R; e −z2 dz). Per calcolare la costante <strong>di</strong> normalizzazione si applichinola formula <strong>di</strong> Rodriguez (II.85) e n integrazioni per parti, risultando nellaseguente successione <strong>di</strong> passaggi:∫ [∞n∑( ) ] n−j ∞dH n (z) 2 e −z2 dz = (−1) n−j+1 H n(j−1) (z) {e −z2 }−∞dzj=1z=−∞∫ ∞) n+H n (z))e −z2 dz(( d−∞ dz=[p(z)e −z2] ∞} {{z=−∞}=0∫ ∞+c n n! e −z2 dz = c n n! √ π,−∞dove p(z) è un polinomio e c n è il coefficiente principale <strong>di</strong> H n (z) (cioè, H n (z) =c n z n +. . .). Calcoliamo ora i coefficienti c n . Derivando la formula <strong>di</strong> Rodriguez(II.85) si arriva all’identitàH ′ n(z) = 2zH n (z) − H n+1 (z).(III.87)72
Confrontando i coefficienti <strong>di</strong> z n+1 nella (II.87) otteniamo 0 = 2c n − c n+1 ,mentre c 0 = 1. Quin<strong>di</strong> c n = 2 n . Infine si arriva alla seguente formula <strong>di</strong>ortogonalità:∫ ∞−∞dove δ n,m è la delta <strong>di</strong> Kronecker.80H n (z)H m (z)e −z2 dz = 2 n (n!) √ π δ n,m ,(III.88)6040200−20−40−2 −1 0 1 2xFigura III.4: I polinomi <strong>di</strong> Hermite <strong>di</strong> grado 1, 2, 3 e 4. Osserviamo che ilnumero degli zeri è uguale al grado del polinomio.Derivando la (II.86) rispetto a z e scrivendo il risultato come un’equazione<strong>di</strong>fferenziale per v ′ si ottiene(v ′ ) ′′ − 2z(v ′ ) ′ + 2(n − 1)(v ′ ) = 0.Dunque H ′ n(z) e H n−1 (z) sono soluzioni della stessa equazione <strong>di</strong>fferenziale cheha soltanto una singola soluzione polinomiale linearmente in<strong>di</strong>pendente. Diconseguenza, H ′ n(z) = cost.H n−1 (z). Siccome H n (z) = 2 n z n + . . . e H n−1 (z) =2 n−1 z n−1 + . . ., risulta n 2 n = cost.2 n−1 e quin<strong>di</strong> cost. = 2n. In altre parole,H ′ n(z) = 2n H n−1 (z).(III.89)Dalle equazioni (II.87) e (II.89) arriviamo alla formula <strong>di</strong> ricorrenza2zH n (z) = H n+1 (z) + 2nH n−1 (z),(III.90)dove H 0 (z) = 1 e H 1 (z) = 2z.73
Dimostriamo ora la formula generatricee 2zt−t2 =∞∑n=0H n (z)n!t n , t ∈ C. (III.91)Infatti, ponendo F (z, t) = e 2zt−t2e scrivendo∞∑F (z, t) =n=0per opportuni coeffienti h n (z), risultanoh n (z)n!t n(III.92)∞∑n=0∂F= 2tF (z, t),∂zh ′ ∞∑n(z)t n 2h n−1 (z)=n!(n − 1)! tn .n=1Quin<strong>di</strong> h n (z) è un polinomio in z <strong>di</strong> grado n eh ′ n(z) = 2nh n−1 (z).(III.93)Dalla (II.92) risulta che h n (0) coincide con la derivata n-esima <strong>di</strong> e −t2 per t = 0,cioè con 0 se n è <strong>di</strong>spari, e con (−1) n/2 (n!)/(n/2)! se n è pari. Dalla formula<strong>di</strong> Rodriguez (II.85) si vede facilmente che H n (0) = h n (0) per n = 0, 1, 2, . . ..Utilizzando le espressioni (II.89) e (II.93) arriviamo alla identità H n (z) = h n (z)e quin<strong>di</strong> alla formula generatrice (II.91).7 Polinomi <strong>di</strong> LaguerreI polinomi <strong>di</strong> Laguerre si definiscono tramite la seguente formula <strong>di</strong> Rodriguez:( )L (α)n (x) = x−α e x n d{x n+α e −x }. (III.94)n! dxSi <strong>di</strong>mostra facilmente che la (II.94) rappresenta un polinomio <strong>di</strong> grado n perogni α ∈ R. La regola <strong>di</strong> Leibnitz ci dà subito la rappresentazione L (α)n (x) =(−1) n (x n /n!) + . . .. Ci limitiamo al caso α > −1.La funzione w(x) = x n+α e −x sod<strong>di</strong>sfa l’equazione <strong>di</strong>fferenzialexw ′ + (x − n − α)w = 0.(III.95)74
Derivando la (II.95) n + 1 volte e ponendo u = w (n) si arriva all’equazione<strong>di</strong>fferenzialexu ′′ + (x + 1 − α)u ′ + (n + 1)u = 0.Sostituendo u = x α e −x v in quest’ultima equazione si ottiene la seguente equazione<strong>di</strong>fferenziale <strong>di</strong> Laguerre:xv ′′ + (α + 1 − x)v ′ + nv = 0.(III.96)Di conseguenza, L n(α) (x) è una soluzione dell’equazione (II.96).Consideriamo ora l’equazione <strong>di</strong>fferenzialexv ′′ + (α + 1 − x)v ′ + νv = 0.(III.97)Sostituendo v(x) = ∑ ∞l=0 c lx l si trova la seguente espressione per il coefficiente<strong>di</strong> x l :(l + 1)(l + α + 1)c l+1 + (ν − l)c l = 0.Quin<strong>di</strong> abbiamo trovato la formula <strong>di</strong> ricorrenzac l+1c l=l − ν(l + 1)(l + α + 1) , (III.98)che ci consente a calcolare tutti i coeffienti c l dal coefficiente iniziale c 0 = v(0);bisogna richiedere α > −1 per garantire la positività del denominatore nellaparte a destra della (II.98). Risulta una soluzione polinomiale <strong>di</strong> grado n =0, 1, 2, . . . se e solo se ν = n.Scrivendo la (II.96) nella forma(x α+1 e −x v ′) ′+ nx α e −x v = 0, (III.99)otteniamo()(n−m)x α e −x L n(α) (x)L m (α) (x)=L (α)n (x) x α+1 e −x L (α) ′ ′ ()m −L(α)m (x) x α+1 e −x L (α) ′ ′n .Calcolando l’integrale sull’intervallo (0, ∞) [dove l’ipotesi α > −1 serve per laconvergenza dell’integrale] si ottiene∫ ∞(n − m) L n(α) (x)L (α)m (x)x α e −x dx0[]= L n(α) (x)x α+1 e −x L m(α) ′(x) − L(α)m (x)x α+1 e −x L (α) ′ ∞n (x)x=0∫ ∞ {}′− (x)x α+1 e −x L (α) ′(x) − L(α)′ (x)x α+1 e −x L (α) ′(x) dx = 0,0L (α)nm75mn
dove abbiamo utilizzato x α+1 → 0 per x → 0 + . Quin<strong>di</strong> per α > −1 i polinomi<strong>di</strong> Laguerre {L n(α) (x)} ∞ n=0 costituiscono un sistema ortogonale nello spazio <strong>di</strong>Hilbert L 2 (R + ; x α e −x dx).Per calcolare la costante <strong>di</strong> normalizzazione facciamo i seguenti passaggi:∫ ∞L n (α) (x) 2 x α e −x dx = 1 ∫ ∞( ) n dL (α)0(n!) 2 n (x) {x n+α e −x } dx0dx[1n∑( ) ] n−j ∞d= (−1) j−1 (L (α)(n!) 2n ) (j−1) (x) {x n+α e −x }dxj=1x=0∫ ∞(( ) n )+ (−1)n dL (α)(n!) 2n (x) x n+α e −x dx0 dx[] ∞1n∑= (−1) j−1 (L (α)(n!) 2n ) (j−1) (x)x α+j e −x L (α+j)n−j (x)j=1x=0(( ) n ) ∫+ (−1)n d∞L (α)(n!) 2n (x) x n+α e −x Γ(n + α + 1)dx = ,dx0n!dove abbiamo fatto n integrazioni per parti, utilizzato la (II.94) con α + j alposto <strong>di</strong> α, applicato l’espressione L (α)n (x) = (−1) n (x n /n!) + . . . e l’identità(A.1). In altre parole,∫ ∞0L n(α) (x)L m (α) (x)x α e −x dx =Γ(n + α + 1)δ n,m ,n!(III.100)dove δ n,m è la delta <strong>di</strong> Kronecker.Derivando la (II.96) si ottiene la seguente equazione <strong>di</strong>fferenziale:Quin<strong>di</strong> L (α)nx(v ′ ) ′′ + (α + 2 − x)(v ′ ) ′ + (n − 1)(v ′ ) = 0.′ (α+1)(x) è proporzionale a L (x). SiccomeL (α) ′ (−1) n x n−1n (x) =(n − 1)!risulta per α > −1n−1+ . . . , L (α+1)n−1 (x) = (−1)n−1 x n−1+ . . . ,(n − 1)!L (α) ′ (α+1)n (x) = −L n−1 (x). (III.101)L’ortogonalità <strong>di</strong> L n(α) (x) a tutti i polinomi <strong>di</strong> grado minore <strong>di</strong> n nello spazio<strong>di</strong> Hilbert L 2 (R + ; x α e −x dx) conduce all’identitàxL (α)n(x) = A (α)nL (α)n+1(x) + B n(α)L (α)n(x) + C (α)nL (α)n−1(x),(III.102)76
40502000−20−40−50−60−80−1000 2 4 6 8 10 12 0 5 10 15xxFigura III.5: I polinomi <strong>di</strong> Laguerre <strong>di</strong> grado 1, 2, 3 e 4 per α = 1 (panellosinistro) e α = 3 (panello destro). Osserviamo che il numerodegli zeri è uguale al grado del polinomio.dove n = 1, 2, 3, . . . e A n , B n e C n sono opportune costanti da determinare.Calcoliamo ora il seguente integrale:C (α)n =∫ ∞0xL (α)n (x)L (α)∫ ∞1=(n + 1)! 0[1 ∑n+1=(n + 1)!j=1∫ ∞+ (−1)n+1(n + 1)! 0[(−1) n ∑n+1=(n + 1)!+ (−1)n+1(n + 1)!= −j=1( ( ddxΓ(n + α + 2),n!n+1(x) x α e −x dx( ) n+1 dxL (α)n (x) {x n+1+α e −x } dxdx( d(−1) j−1 (xL (α)n ) (j−1) (x)( ( ddx) n+1{xL (α)n (x)}dx)) n+1−j{x n+1+α e −x }x n+1+α e −x dx] ∞(xL (α)n ) (j−1) (x)(n + 1 − j)!x α+j e −x L (α+j)n+1−j (x) x=0) ∫ ∞) n+1{xL (α)n (x)}0x n+1+α e −x dx] ∞x=0dove abbiamo utilizzato xL n (α) (x) = (−1) n (x n+1 /n!) + . . .. Poi calcoliamol’integrale:D (α)n =∫ ∞0xL (α)n (x) 2 x α e −x dx77
= 1 ∫ ∞( ) n dxL n(α) (x) {x n+α e −x } dxn! 0dx[1n∑( ) ] n−j ∞d= (−1) j−1 (xL (α)n ) (j−1) (x) {x n+α e −x }n!dxj=1x=0∫ ∞(( ) n )+ (−1)n d{xL (α)n (x)} x n+α e −x dxn! 0 dx[1n∑= (−1) j−1 (xL (α)n ) (j−1) (x)(−1) n−j (n − j)!x α+j e −x L (α+j)n−j (x)n!j=1∫ ∞(( ) n )+ (−1)n d{xL (α)n (x)} x n+α e −x dxn! dx0∫ ∞= (−1)n ((n + 1)! x − n(n + α)n!) x n+α e −x dxn! 0(n + 1)Γ(n + α + 2) − n(n + α)Γ(n + α + 1)=n!(2n + 1 + α)Γ(n + α + 1)= ,n!dove abbiamo utilizzato xL (α)n(II.102) e le espressioni per C (α)n2n + 1 + α e C (α)n] ∞x=0(x) = (−1) n ((x n+1 −n(n+α)x n )/n!)+. . .. Dallae D n(α) seguono A (α)n = −(n + 1), B n (α) == −(n + α). Dunque risulta la formula <strong>di</strong> ricorrenza(2n + 1 + α − x)L n(α) (x) = (n + 1)L (α)n+1(x) + (n + α)L (α)n−1(x),(III.103)dove L (α)0 (x) = 1 e L (α)1 (x) = 1 + α − x.Per <strong>di</strong>mostrare la vali<strong>di</strong>tà della formula generatrice((1 − t) −(1+α) exp − xt )=1 − tpartiamo dalla serie <strong>di</strong> funzioni∞∑n=0(F (x, t) = (1 − t) −(1+α) exp − xt )=1 − tL (α)n (x)t n , |t| < 1, (III.104)∞∑c n (x)t n , |t| < 1, (III.105)dove c n (x) n! è la derivata parziale n-esima <strong>di</strong> F (x, t) rispetto a t per t = 0.Sostituendo la serie (II.105) nella equazionen=0(1 − t) 2 ∂F∂t+ [x − (1 + α)(1 − t)] F = 0,78
otteniamo le seguenti espressioni per i coefficienti t n (n = 1, 2, 3, . . .) e per ilcoefficiente <strong>di</strong> t 0 :{(n + 1)c n+1 (x) + (x − 2n − α − 1)c n (x) + (n + α)c n−1 (x),c 1 (x) + (x − α − 1)c 0 (x) = 0,dove c 0 (x) = 1. Quin<strong>di</strong> c n (x) = L (α)n (x) per n = 0, 1, 2, · · · (ve<strong>di</strong> la (II.103)).Infine, per esprimere i polinomi <strong>di</strong> Hermite in quelli <strong>di</strong> Laguerre riscriviamoi prodotti scalari tra quest’ultimi utilizzando la trasformazione x = t 2 :∫ ∞0∫ ∞0∫ ∞L n(α) (x)L m (α) (x)x α e −x dx =L n(α) (x)L m (α) (x)x α e −x dx =−∞∫ ∞−∞L (α)n (t 2 )L (α)m (t 2 )|t| 2α+1 e −t2 dt,tL (α)n (t 2 )tL (α)m (t 2 )|t| 2α−1 e −t2 dt.(III.106)(III.107)Per fare scomparire i fattori |t| 2α±1 in (II.106) e (II.107) scegliamo α = − 1 2in (II.106) e α = 1 in (II.107). Quin<strong>di</strong> H 2 2n(t) è proporzionale a L (− 1 2 )n (t 2 )e H 2n+1 (t) è proporzionale a tL ( 1 2 )n (t 2 ). Confrontando i coefficienti principaliotteniamoH 2n (t) = 2 2n n!(−1) n L (− 1 2 )n (t 2 ), (III.108)H 2n+1 (t) = 2 2n+1 n!(−1) n tL ( 1 2 )n (t 2 ). (III.109)8 Polinomi <strong>di</strong> ChebyshevI polinomi <strong>di</strong> Chebyshev <strong>di</strong> prima specie T n (x) e <strong>di</strong> seconda specie U n (x) sidefiniscono nel seguente modo: 8T n (x) = cos(nt),U n (x) =sin((n + 1)t), (III.110)sin twhere x = cos(t). In tal caso T n (x) e U n (x) sono polinomi <strong>di</strong> x <strong>di</strong> grado n chehanno le seguenti proprietà:T 0 (x) = 1, T 1 (x) = x, T n+1 (x) + T n−1 (x) = 2xT n (x),U 0 (x) = 1, U 1 (x) = 2x, U n+1 (x) + U n−1 (x) = 2xU n (x).8 Per x ∈ R \ [−1, 1] si hanno le definizioni alternative T n (x) = cosh(nt) e U n (x) =sinh((n + 1)t)/ sinh t per x = cosh t.79
La formula <strong>di</strong> ricorrenza è facile da verificare:T n+1 (x) + T n−1 (x) = cos((n + 1)t) + cos((n − 1)t)= 2 cos(t) cos(nt) = 2xT n (x),sin((n + 2)t)U n+1 (x) + U n−1 (x) = + sin(nt)sin(t) sin(t)2 cos(t) sin((n + 1)t)= = 2xU n (x).sin(t)Si vede subito che −1 ≤ T n (x) ≤ +1 per x ∈ [−1, 1], mentre T n (x) = 2 n−1 x n +. . . e U n (x) = 2 n x n + . . . per n ∈ N.1540.50−0.53210−1−2−1−1 −0.5 0 0.5−41 −1 −0.5 0 0.5 1xx−3Figura III.6: I polinomi <strong>di</strong> Chebyshev <strong>di</strong> prima e seconda specia <strong>di</strong> grado 1,2, 3 e 4. Nel panello sinistro si trovano i grafici dei polinomi <strong>di</strong>Chebyshev <strong>di</strong> prima specie e nel panello destro quelli <strong>di</strong> secondaspecie. Osserviamo che il numero degli zeri è uguale al gradodel polinomio. Inoltre, i polinomi <strong>di</strong> Chebyshev <strong>di</strong> prima speciehanno ±1 come i loro valori estremi.Sono verificate le relazioni <strong>di</strong> ortogonalità∫ π0∫ πSostituendo x = cos(t) otteniamo0cos(nt) cos(mt) dt = π 2 (1 + δ n,0)δ n,m ,sin((n + 1)t) sin(m + 1)t) dt = π 2 δ n,m.∫ 1−1T n (x)T m (x)dx√1 − x2 = π 2 (1 + δ n,0)δ n,m ,(III.111)80
∫ 1−1U n (x)U m (x) √ 1 − x 2 dx = π 2 δ n,m.(III.112)Quin<strong>di</strong> {T n (x)} ∞ n=0 sono i polinomi ortogonali su [−1, 1] con peso (1 − x 2 ) −1/2e {U n (x)} ∞ n=0 sono i polinomi ortogonali su [−1, 1] con peso (1 − x 2 ) 1/2 , tranneper fattori costanti.Le funzioni cos(nt) e sin(nt) sod<strong>di</strong>sfano all’equazione <strong>di</strong>fferenziale u ′′ (t) +n 2 u(t) = 0. Sostituendo x = cos(t) e utilizzando le definizioni per T n (x) eU n (x) otteniamo{(1 − x 2 )T ′′n (x) − xT ′ n(x) + n 2 T n (x) = 0,(1 − x 2 )U ′′n(x) − 3xU ′ n(x) + n 2 U n (x) = 0.In forma Sturm-Liouville abbiamo⎧d ( ⎪⎨ (1 − x 2 ) 1/2 Tdxn(x) ) ′ = −n 2 T n (x)√ , 1 − x2⎪⎩ d ((1 − x 2 ) 3/2 U ′dxn(x) ) = −n 2√ 1 − x 2 U n (x).9 Polinomi Ortogonali GeneraliSia I un intervallo della retta reale e w una funzione positiva quasi ovunque suI tale che ∫ I |x|2n w(x) dx < ∞ (n = 0, 1, 2, . . .). Allora i polinomi sono tuttielementi dello spazio <strong>di</strong> Hilbert L 2 (I; w dx). Infatti, i polinomi costituisconoun sottospazio lineare denso in L 2 (I; w dx), un fatto che non <strong>di</strong>mostriamo.Applicando il processo <strong>di</strong> Gram-Schmidt al sistema {ψ n } ∞ n=0 dove ψ n (x) = x n ,si ottengono i polinomi ortogonali {p n } ∞ n=0 rispetto al peso w, dove il grado<strong>di</strong> p n è uguale ad n e i coefficienti principali sono tutti positivi. Data unafunzione f ∈ L 2 (I; w dx) e definendo i coefficienti∫c n = f(x)p n (x)w(x) dx, n = 0, 1, 2, . . . ,otteniamo l’identità <strong>di</strong> Parseval∫|f(x)| 2 w(x) dx =II∞∑|c n | 2n=0e lo sviluppo∞∑f(x) = c n p n (x)n=081
convergente nel senso che∫limN→∞IN ∣ f(x) − ∑c n p n (x)∣n=02w(x) dx = 0.I polinomi ortogonali sono stati stu<strong>di</strong>ati nel libro <strong>di</strong> Szegő [16]. Alcuneclassi <strong>di</strong> polinomi ortogonali hanno la proprietà aggiuntiva che appaiono comele autofunzioni <strong>di</strong> un problema <strong>di</strong> Sturm-Liouville su un opportuno intervalloI della retta reale. Ce l’abbiamo già visto per quanto riguardano i polinomi<strong>di</strong> Legendre, i polinomi associati <strong>di</strong> Legendre, e quelli <strong>di</strong> Hermite, Laguerree Chebyshev. A quelli si aggiungono i polinomi <strong>di</strong> Gegenbauer (anche dettipolinomi ultrasferici 9 ) e i polinomi <strong>di</strong> Jacobi.Nome dei polinomi I w(x)Legendre (−1, 1) 1Chebyshev <strong>di</strong> 1 a specie (−1, 1) (1 − x 2 ) −1/2Chebyshev <strong>di</strong> 2 a specie (−1, 1) (1 − x 2 ) 1/2Legendre associati (−1, 1) (1 − x 2 ) m per m = 1, 2, 3, . . .Jacobi (−1, 1) (1 − x) α (1 + x) β per α, β > −1Gegenbauer o ultrasferici (−1, 1) (1 − x 2 ) λ per λ > −1Laguerre (0, ∞) x α e −x per α > −1Hermite (−∞, ∞) e −x2Infine <strong>di</strong>mostriamo alcune proprietà degli zeri dei polinomi ortogonali.Lemma III.1 Si ha (f, p n ) L 2 (I;w dx) = 0 per ciascun polinomio f <strong>di</strong> grado < n.Dimostrazione. Sia f un polinomio <strong>di</strong> grado < n. Allora f è una combinazionelineare dei polinomi p 0 , p 1 , · · · , p n−1 . Siccome (p j , p n ) = 0 in L 2 (I; w dx)per j = 0, 1, · · · , n − 1, risulta (f, p n ) = 0.✷Teorema III.2 Gli zeri del polinomio p n sono tutti semplici e contenuti all’internodell’intervallo I.Dimostrazione. Sia I = (a, b) dove −∞ ≤ a < b ≤ +∞. Supponiamo chep n ha m (con m < n) zeri α 1 , · · · , α m in (a, b) e n − m zeri in C \ (a, b). Allorap n ammette la rappresentazionep n (x) = (x − α 1 ) · · · (x − α m )q(x),9 I polinomi ortogonali su I = (−1.1) con w(x) = (1−x 2 ) λ per cui 2λ ∈ N∪{0}, appaionocome funzioni sferiche <strong>di</strong> <strong>di</strong>mensione ≥ 2λ + 3.82
dove q è un polinomio <strong>di</strong> grado n − m che non cambia segno in (a, b); dunqueq(x) ≥ 0 per x ∈ (a, b). Consideriamo il polinomio f definito daf(x) = (x − α 1 ) · · · (x − α m ).Secondo il Lemma II.1 risulta (f, p n ) = 0. In particolare,∫0 = (f, p n ) = c [(x − α 1 ) · · · (x − α m )] 2 q(x)w(x) dx,Idove la funzione sotto il segno dell’integrale è non negativa. Ciò implica chec ∫ I [(x − α 1) · · · (x − α m )] 2 q(x)w(x) = 0 quasi ovunque. Contrad<strong>di</strong>zione. Siconclude pertanto che tutti gli zeri <strong>di</strong> p n appartengono ad (a, b).Per escludere l’esistenza <strong>di</strong> zeri multipli <strong>di</strong> p n , rappresentiamo p n comep n (x) = c(x − β 1 ) m1 · · · (x − β r ) mr ,dove β 1 , · · · , β r sono gli zeri <strong>di</strong>stinti <strong>di</strong> p n e m 1 + · · · + m r = n. Bisogna<strong>di</strong>mostrare che r = n, m 1 = · · · = m n = 1 e c > 0. Se esiste un in<strong>di</strong>ce jcon m j > 1, definiamo n j = 0 se m j è pari e n j = 1 se m j è <strong>di</strong>spari (cioè, sem j = 3, 5, 7, · · · ). Poi consideriamo il polinomio g definito dag(x) = (x − β 1 ) m1 · · · (x − β j−1 ) m j−1(x − β j ) n j(x − β j+1 ) m j+1· · · (x − β r ) mr .Siccome il grado <strong>di</strong> g è strettamente minore <strong>di</strong> n, si ha (g, p n ) = 0. In altreparole l’integrale∫c (x − β 1 ) 2m1· · ·(x − β j−1 ) 2m j−1(x − β j ) m j+n j(x − β j+1 ) 2m j+1· · ·(x − β r ) 2mr dx} {{ }Iespressione non negativa, poichè m j +n j è parivale zero. Quin<strong>di</strong> la funzione sotto il segno dell’integrale si annulla quasiovunque. Contrad<strong>di</strong>zione. Quin<strong>di</strong> tutti gli n zeri <strong>di</strong> p n sono semplici. ✷I polinomi ortogonali sod<strong>di</strong>sfano una relazione <strong>di</strong> ricorrenza a tre termini.Teorema III.3 Sia α n = (xp n+1 , p n ), c n = (xp n , p n ) e α −1 = 0. Allora(x − c n )p n (x) = α n p n+1 (x) + α n−1 p n−1 (x), n = 0, 1, 2, · · · .Inoltre, se I = (−h, h) e w è pari, allora p n (−x) = (−1) n p n (x) e c n = 0.Dimostrazione. Siccome xp n (x) è un polinomio <strong>di</strong> grado n + 1, è unacombinazione lineare <strong>di</strong> p 0 , p 1 , · · · , p n , p n+1 . Purtroppo∫(xp n , p j ) = p n (x) · xp j (x)w(x) dx = 0, j < n − 1,I83
poichè xp j (x) con j < n − 1 è un polinomio <strong>di</strong> grado < n. Quin<strong>di</strong> xp n (x) èuna combinazione lineare <strong>di</strong> soltanto tre polinomi ortogonali: p n−1 , p n , p n+1 .Scriviamoxp n (x) = c n p n (x) + α n p n+1 (x) + β n p n−1 (x),dove non c’è il terzo termine nella parte a destra per n = 0. Si vede facilmenteche ⎧⎪⎨⎪ ⎩α n = (xp n , p n+1 )β n = (xp n , p n−1 ) = (xp n−1 , p n ) = α n−1c n = (xp n , p n ).In generale, se {p j } ∞ j=0 sono i polinomi ortogonali rispetto al peso w su I,allora {(−1) j p j (−x)} ∞ j=0 sono i polinomi ortogonali rispetto al peso w(−x) su−I. Assumiamo ora che I = (−h, h) (potenzialmente con h = +∞) e w siapari. Allora p n (−x) = (−1) n p n (x) e dunque∫c n =il che conclude la <strong>di</strong>mostrazione.Ipari{ }} {x p n (x) 2 w(x) dx = 0,} {{ }<strong>di</strong>spari✷Introduciamo ora la funzione bivariatan∑K n (x, y) = p j (x)p j (y).j=0Lemma III.4 Vale la formula <strong>di</strong> Christoffel-Darbouxdove α n = (xp n , p n+1 ). Inoltre,(III.113)p n+1 (x)p n (y) − p n (x)p n+1 (y)K n (x, y) = α n , (III.114)x − yK n (x, x) = α n(p′n+1 (x)p n (x) − p ′ n(x)p n+1 (x) ) .Dimostrazione. Il Teorema II.3 e la (II.113) implicano chen∑(x − y)K n (x, y) = (α j p j+1 (x) + α j−1 p j−1 (x) + c j p j (x)) p j (y)−=j=0n∑p j (x) (α j p j+1 (y) + α j−1 p j−1 (y) + c j p j (y))j=0n∑(α j p j+1 (x)p j (y) − α j−1 p j−1 (y)p j (x))j=0(III.115)84
++n∑(α j−1 p j−1 (x)p j (y) − α j p j+1 (y)p j (x))j=0n∑(c j p j (x)p j (y) − c j p j (y)p j (x))j=0} {{ }=0= α n (p n+1 (x)p n (y) − p n (x)p n+1 (y)) .La (II.115) ne segue utilizzando il Teorema <strong>di</strong> De L’Hôpital.✷Il Lemma II.4 conduce alla seguente proprietà degli zeri dei polinomi ortogonali.Teorema III.5 Tra ogni coppia <strong>di</strong> zeri consecutivi del polinomio p n+1 (x) cadeesattamente uno zero del polinomio p n (x). In particolare, i polinomi p n (x) ep n+1 (x) non hanno zeri in comune.Dimostrazione. Ci ricor<strong>di</strong>amo che gli zeri dei polinomi p n (x) e p n+1 (x)sono tutti reali e semplici. Siano ora ξ 1 < ξ 2 < . . . < ξ n < ξ n+1 gli zeridel polinomio p n+1 (x). Allora la (II.113) e (II.115) implicano che per k =1, 2, . . . , n0
Capitolo IVEQUAZIONI INTEGRALI1 Proprietà Elementari e IterazioneLe equazioni contenenti la funzione incognita sotto il segno dell’integrale sonodette equazioni integrali. Molti problemi della fisica matematica possono essereridotti ad equazioni integrali lineari della forma∫K(x, y)ϕ(y) dy = f(x),(IV.1)∫Ωϕ(x) = λ K(x, y)ϕ(y) dy + f(x),(IV.2)Ωrispetto alla funzione incognita ϕ(x) in una regione Ω ⊂ R n . L’equazione(III.1) si <strong>di</strong>ce equazione integrale <strong>di</strong> prima specie, mentre l’equazione (III.2) si<strong>di</strong>ce equazione <strong>di</strong> Fredholm <strong>di</strong> seconda specie. Le funzioni note K(x, y) e f(x)sono dette nucleo e termine noto dell’equazione integrale; λ è un parametrocomplesso.L’equazione integrale (III.2) per f = 0∫ϕ(x) = λ K(x, y)ϕ(y) dy(IV.3)Ωsi <strong>di</strong>ce equazione integrale <strong>di</strong> Fredholm omogenea <strong>di</strong> seconda specie corrispondenteall’equazione (III.2). Le equazioni integrali <strong>di</strong> Fredholm <strong>di</strong> secondaspecie∫ψ(x) = λ K ∗ (x, y)ψ(y) dy + g(x),(IV.4)∫Ωψ(x) = λ K ∗ (x, y)ψ(y) dy,(IV.5)Ω87
dove K ∗ (x, y) = K(y, x), sono dette aggiunte alle equazioni (III.2) e (III.3),rispettivamente. Il nucleo K ∗ (x, y) si <strong>di</strong>ce nucleo coniugato aggiunto al nucleoK(x, y). Il nucleo K(x, y) si <strong>di</strong>ce hermitiano se K ∗ (x, y) = K(x, y), cioè seK(y, x) = K(x, y) quasi ovunque. Il nucleo K(x, y) si <strong>di</strong>ce reale e simmetricose K(x, y) è reale e K(y, x) = K(x, y) quasi ovunque. Ovviamente un nucleoreale e simmetrico è hermitiano.Scriveremo le equazioni (III.2), (III.3), (III.4) e (III.5) in forma contratta,utilizzando la notazione d’operatore:{ϕ = λKϕ + f, ϕ = λKϕ,ψ = λK ∗ ψ + g, ψ = λK ∗ ψ,dove gli operatori integrali K e K ∗ sono determinati dai nuclei K(x, y) eK ∗ (x, y), rispettivamente:∫∫(Kf)(x) = K(x, y)f(y) dy, (K ∗ f)(x) = K ∗ (x, y)f(y) dy.ΩTra poco metteremo opportune con<strong>di</strong>zioni sul dominio Ω e sul nucleoK(x, y) affinché gli operatori lineari K e K ∗ siano limitati in un opportunospazio <strong>di</strong> Banach (o <strong>di</strong> Hilbert) <strong>di</strong> funzioni f(x) definite in Ω. In particolare,verranno considerati gli spazi L 1 (Ω), L 2 (Ω) e C(Ω).Supponiamo che nell’equazione integrale (III.2) la regione Ω sia limitata inR n , la funzione f appartenga allo spazio L 2 (Ω) ed il nucleo K(x, y) sia continuosu Ω × Ω (<strong>di</strong>remo continui questi nuclei).Lemma IV.1 L’operatore integrale K con nucleo continuo K(x, y) trasferisceL 2 (Ω) in C(Ω) (e, <strong>di</strong> conseguenza, C(Ω) in C(Ω) e L 2 (Ω) in L 2 (Ω). Dunque,K è limitato come operatore lineare tra questi spazi, ed inoltredove M =‖Kf‖ C ≤ M √ m(Ω)‖f‖ 2 , f ∈ L 2 (Ω), (IV.6)‖Kf‖ C ≤ Mm(Ω)‖f‖ C , f ∈ C(Ω), (IV.7)‖Kf‖ 2 ≤ Mm(Ω)‖f‖ 2 , f ∈ L 2 (Ω), (IV.8)max |K(x, y)| e m(Ω) è la misura <strong>di</strong> Ω.x,y∈Ω×ΩIl lemma si descrive tramite il seguente schema:C(Ω)L 2 (Ω)L 1 (Ω)imm.−−−→ L 2 (Ω)imm.−−−→ L 1 (Ω)K−−−→ C(Ω)imm.−−−→ L 1 (Ω)K−−−→ C(Ω)imm.−−−→ L 2 (Ω)88ΩK−−−→ C(Ω)imm.−−−→ L 2 (Ω)imm.−−−→ L 1 (Ω)
Dimostrazione. Siccome Ω × Ω è compatto, 1 il nucleo K(x, y) è uniformementecontinuo in (x, y) ∈ Ω × Ω. Ci ricor<strong>di</strong>amo che una funzione continuadefinita su uno spazio compatto è uniformemente continua. Quin<strong>di</strong>, dato ε > 0,esiste δ > 0 tale che |K(x 1 , y 1 ) − K(x 2 , y 2 )| < ε se ‖(x 1 − x 2 , y 1 − y 2 )‖ < δ. Diconseguenza, se f ∈ L 2 (Ω), per |x 1 − x 2 | < δ si ha la stima∫|(Kf)(x 1 ) − (Kf)(x 2 )| ≤ |K(x 1 , y) − K(x 2 , y)| |f(y)|dyΩ∫≤ ε|f(y)|dy ≤ ε √ M(Ω) ‖f‖ 2 ,Ωe quin<strong>di</strong> K trasferisce L 2 (Ω) in C(Ω).Per f ∈ C(Ω) si trova la stima∫‖f‖ 2 2 = |f(x)| 2 dx ≤ m(Ω)‖f‖ 2 C,Ωf ∈ C(Ω),implicando ‖f‖ 2 ≤ √ m(Ω) ‖f‖ C . Dunque C(Ω) è contenuto in L 2 (Ω), dove√ l’operatore <strong>di</strong> immersione è limitato <strong>di</strong> norma limitata superiormente dam(Ω).✷Cerchiamo la soluzione dell’equazione (III.2) me<strong>di</strong>ante il metodo delle approssimazionisuccessive, ponendo ϕ (0) (x) = f(x),∫ϕ (p) (x) = λ K(x, y)ϕ (p−1) (y) dy + f(x) ≡ λKϕ (p−1) + f, p = 1, 2, · · · .Ω(IV.9)Quin<strong>di</strong>p∑ϕ (p) = λ j K j f, p = 0, 1, 2, · · · , (IV.10)j=0dove K j denotano le potenze j-esime dell’operatore K. Secondo il LemmaIII.1, le iterazioni <strong>di</strong> f ∈ L 2 (Ω) sod<strong>di</strong>sfano la <strong>di</strong>suguaglianza‖K p f‖ 2 = ‖K(K p−1 f)‖ 2 ≤ Mm(Ω)‖K p−1 f‖ 2≤ (Mm(Ω)) 2 ‖K p−2 f‖ 2 ≤ · · · ≤ (Mm(Ω)) p ‖f‖ 2 ,cioè‖K p f‖ 2 ≤ (Mm(Ω)) p ‖f‖ 2 , p = 0, 1, 2, · · · . (IV.11)1 Per i sottoinsiemi <strong>di</strong> uno spazio euclideo, compatto vuol <strong>di</strong>re chiuso e limitato.89
Da questa <strong>di</strong>suguaglianza segue che la serie∞∑λ j (K j f)(x), x ∈ Ω, (IV.12)j=0detta serie <strong>di</strong> Neumann, è maggiorata nella norma L 2 dalla serie numerica‖f‖ 2∞∑j=0|λ| j (Mm(Ω)) j =che converge nel <strong>di</strong>sco |λ| < 1/Mm(Ω).‖f‖ 21 − |λ|Mm(Ω) , (IV.13)Stabiliamo preliminarmente che è valida la seguente uguaglianza:(Kf, g) = (f, K ∗ g), f, g ∈ L 2 (Ω). (IV.14)Infatti, se f e g appartengono a L 2 (Ω), conformemente al Lemma III.1, ancheKf e K ∗ g appartengono a L 2 (Ω) e quin<strong>di</strong> si ha∫∫ [∫](Kf, g) = (Kf)(x)g(x) dx = K(x, y)f(y) dy g(x) dxΩΩ Ω∫ [∫] ∫ [∫]= f(y) K(x, y)g(x) dx dy = f(y) K ∗ (y, x)g(x) dx dyΩΩΩΩ∫= f(x)(K ∗ g)(x) dx = (f, K ∗ g).ΩLemma IV.2 Se K 1 e K 2 sono operatori integrali con nuclei continui K 1 (x, y)e K 2 (x, y), rispettivamente, l’operatore K 3 = K 2 K 1 è un operatore integrale connucleo continuo∫K 3 (x, y) = K 2 (x, y ′ )K 1 (y ′ , y) dy ′ .(IV.15)In questo caso è valida la seguente formula:Ω(K 2 K 1 ) ∗ = K ∗ 1K ∗ 2. (IV.16)Dimostrazione. Per tutte le f ∈ L 2 (Ω) abbiamo∫ ∫(K 3 f)(x) = (K 2 K 1 f)(x) = K 2 (x, y ′ ) K 1 (y ′ , y)f(y) dy dy ′ΩΩ∫ ∫= [K 2 (x, y ′ )K 1 (y ′ , y) dy ′ ] f(y) dy,ΩΩda cui segue la formula (III.15). È evidente che il nucleo K 3 (x, y) è continuoper (x, y) ∈ Ω × Ω. Infatti, dato ε > 0, per i = 1, 2 esiste δ i > 0 tale che90
|K i (x 1 , y 1 ) − K i (x 2 , y 2 )| < ε/([M 1 + M 2 ]m(Ω)) se ‖(x 1 , y 1 ) − (x 2 , y 2 )‖ < δ i .Quin<strong>di</strong>, se ‖(x 1 , y 1 ) − (x 2 , y 2 )‖ < δ = min(δ 1 , δ 2 ), risulta∫|K 3 (x 1 , y 1 ) − K 3 (x 2 , y 2 )| ≤ |K 2 (x 1 , y ′ ) − K 2 (x 2 , y ′ )||K 1 (y ′ , y 1 )| dy ′Ω∫+ |K 2 (x 2 , y ′ )||K 1 (y ′ , y 1 ) − K 1 (y ′ , y 2 )| dy ′ < [M 2m(Ω) + M 1 m(Ω)]ε= ε,[M 1 + M 2 ]m(Ω)Ωimplicando la continuità uniforme <strong>di</strong> K 3 (x, y).Prendendo in considerazione l’uguaglianza (III.14), per tutte le f e g appartenentia L 2 (Ω) si ottiene(f, K ∗ 3g) = (K 3 f, g) = (K 2 K 1 f, g) = (K 1 f, K ∗ 2g) = (f, K ∗ 1K ∗ 2g), f, g ∈ L 2 (Ω),cioè (f, K3g ∗ − K1K ∗ 2g) ∗ = 0 per tutte le f, g ∈ L 2 (Ω), e, quin<strong>di</strong>, K3 ∗ = K1K ∗ 2,∗il che equivale all’uguaglianza (III.16). Il lemma è <strong>di</strong>mostrato.✷Dal Lemma III.2 appena <strong>di</strong>mostrato segue che gli operatori K p = K(K p−1 )= (K p−1 )K, p = 2, 3, · · · , sono operatori integrali ed i loro nuclei K p (x, y) sonocontinui e sod<strong>di</strong>sfano le relazioni <strong>di</strong> ricorrenza K 1 (x, y) = K(x, y),∫∫K p (x, y) = K(x, y ′ )K p−1 (y ′ , y) dy ′ = K p−1 (x, y ′ )K(y ′ , y) dy ′ . (IV.17)ΩI nuclei K p (x, y) sono detti nuclei iterati del nucleo K(x, y).Dalle relazioni <strong>di</strong> ricorrenza (III.17) segue che i nuclei iterati sod<strong>di</strong>sfano la<strong>di</strong>suguaglianzaDalla (III.18) segue che la serieΩ|K p (x, y)| ≤ M p m(Ω) p−1 , p = 1, 2, · · · . (IV.18)∞∑λ p K p+1 (x, y), (x, y) ∈ Ω × Ω, (IV.19)p=0è maggiorata me<strong>di</strong>ante la serie numerica∞∑|λ| p M p+1 m(Ω) k ,p=0convergente nel <strong>di</strong>sco |λ| < 1/Mm(Ω). Perciò la serie (III.19) è uniformemente(anche totalmente) convergente in (x, y, λ) ∈ Ω × Ω × {z ∈ C : |z|
(1/Mm(Ω)) − ε}, per ε > 0 qualsiasi. Di conseguenza, la sua somma è continuain Ω × Ω × {z ∈ C : |z| < (1/Mm(Ω))} ed analitica in λ nel <strong>di</strong>sco|λ| < 1/Mm(Ω). In<strong>di</strong>chiamo la somma della serie (III.19) con R(x, y; λ):R(x, y; λ) =∞∑λ p K p+1 (x, y).La funzione R(x, y; λ) è detta risolvente del nucleo K(x, y).p=0Teorema IV.3 La soluzione ϕ dell’equazione integrale (III.2) è unica nellaclasse L 2 (Ω) per |λ| < 1/Mm(Ω) e per qualunque f ∈ L 2 (Ω) è rappresentatacon il risolvente R(x, y; λ) del nucleo K(x, y) me<strong>di</strong>ante l’equazione∫ϕ(x) = f(x) + λ R(x, y; λ)f(y) dy,(IV.20)in altre parole, è valida la seguente equazione operatoriale:Ω(I − λK) −1 = I + λR(λ), |λ| < (1/Mm(Ω)), (IV.21)dove R(λ) è un operatore integrale con nucleo R(x, y; λ).Si può <strong>di</strong>mostrare che il risolvente R(x, y; λ) <strong>di</strong> un nucleo continuo K(x, y)ammette un prolungamento meromorfo in tutto il piano della variabile complessaλ ed inoltre i suoi poli sono i numeri caratteristici del nucleo K(x, y). 22 Equazioni integrali <strong>di</strong> VolterraSupponiamo che n = 1, la regione G sia l’intervallo limtato (0, a) ed il nucleoK(x, y) si annulli nel triangolo 0 < x < y < a. Questo nucleo si <strong>di</strong>ce nucleo <strong>di</strong>Volterra. L’equazione (III.2) con nucleo <strong>di</strong> Volterra ha la forma∫ xϕ(x) = λ K(x, y)ϕ(y) dy + f(x)0(IV.22)e è detta equazione integrale <strong>di</strong> Volterra <strong>di</strong> seconda specie.Supponiamo che nell’equazione (III.22) sia f ∈ C([0, a]) e che il nucleoK(x, y) sia continuo nel triangolo chiuso 0 ≤ y ≤ x ≤ a. Allora |K(x, y)| ≤ Mper un’opportuna costante M e l’operatore integrale(Kf)(x) =∫ x0K(x, y)f(y) dy2 λ si <strong>di</strong>ce numero caratteristico <strong>di</strong> K se esiste 0 ≠ ϕ ∈ L 1 (Ω) tale che ϕ = λKϕ. In talcaso λ ≠ 0, 1/λ è autovalore <strong>di</strong> K e ϕ ∈ C(Ω).92
trasferisce C([0, a]) in C([0, a]).Definiamo ora le approssimazioni successive ϕ (p) :p∑ϕ (0) = f, ϕ (p) = λ k K k f = λKϕ (p−1) + f, p = 1, 2, · · · . (IV.23)k=0Le iterazioni K p f appartengono a C([0, a]) e sod<strong>di</strong>sfano la stima|(K p (Mx) pf)(x)| ≤ ‖f‖ C , x ∈ [0, a], p = 0, 1, · · · . (IV.24)p!Dimostriamo la stima (III.24) per induzione rispetto a p. Per p = 0, lastima (III.24) è valida. Supponendola valida per p − 1, <strong>di</strong>mostriamo la suavali<strong>di</strong>tà per p:|(K p f)(x)| = ∣ ∣(K(K p−1 f))(x) ∣ ∣ ≤≤ M‖f‖ C M p−1 ∫ x0∫ x0|K(x, y)||(K p−1 f)(y)| dyy p−1(p − 1)! dy = ‖f‖ C(Mx) p.p!Dalla stima (III.24) segue che la serie <strong>di</strong> Neumann (III.10) è maggiorata su[0, a] me<strong>di</strong>ante la serie numerica convergente‖f‖ C∞∑k=0|λ| k (Ma)kk!= ‖f‖ C e |λ|Ma (IV.25)e per questa ragione è uniformente (infatti, totalmente) convergente in x ∈[0, a] per λ qualsiasi, definendo una funzione continua ϕ(x). Dunque, invirtù della (III.23), le approssimazioni successive ϕ (p) per p → ∞ tendonouniformemente alla funzione ϕ:limp→∞max |ϕ (p) (x) − ϕ(x)| = 0, ϕ(x) =x∈[0,a]∞∑λ k (K k f)(x).k=0Qui, in virtù della (III.25), è valida la <strong>di</strong>suguaglianza‖ϕ‖ C ≤ ‖f‖ C e |λ|Ma .Formuliamo i risultati ottenuti nella forma del seguente(IV.26)(IV.27)Teorema IV.4 Ogni equazione integrale <strong>di</strong> Volterra (III.22) con nucleo continuoK(x, y) nel triangolo {(x, y) : 0 ≤ y ≤ x ≤ a} per λ qualsiasi ha un’unicasoluzione ϕ nella classe C([0, a]) per qualunque termine noto f ∈ C([0, a]).Questa soluzione è data dalla serie <strong>di</strong> Neumann uniformemente convergente(III.26) sod<strong>di</strong>sfa la <strong>di</strong>suguaglianza (III.27). Dunque un nucleo <strong>di</strong> Volterracontinuo non ha numeri caratteristici.93
Risolviamo ora l’equazione <strong>di</strong> Volterraϕ(x) = λ∫ x0ϕ(y) dy + f(x), 0 ≤ x ≤ a.Se f ∈ C 1 ([0, a]), allora l’equazione integrale si riduce al problema <strong>di</strong> Cauchyϕ ′ (x) = λϕ(x) + f ′ (x),ϕ(0) = f(0).La sua soluzione unica ha la formaϕ(x) = e λx f(0) +∫ x0e λ(x−y) f ′ (y) dy= e λx f(0) + [ e λ(x−y) f(y) ] ∫ xx+ λ e λ(x−y) f(y) dyy=0= f(x) + λ∫ x0e λ(x−y) f(y) dy.Quest’ultima espressione si generalizza facilmente a f ∈ C([0, a]).03 Equazioni Integrali con Nucleo HermitianoUn nucleo K(x, y) è detto hermitiano se questo nucleo coincide con il suo coniugatohermitiano, K(x, y) = K ∗ (x, y) = K(y, x). La corrispondente equazioneintegrale∫ϕ(x) = λ K(x, y)ϕ(y) dy + f(x)(IV.28)Ωper λ reali coincide con la sua aggiunta, essendo K ∗ = K un operatore autoaggiuntonello spazio L 2 (Ω). Se il nucleo K(x, y) è continuo, K è anche limitatosu L 2 (Ω). I numeri caratteristici e le autofunzioni trovati sono anche i numericaratteristici e le autofunzioni se la (III.28) viene considerata nello spazioL 2 (Ω) per un nucleo continuo ed hermitiano qualsiasi.a. Operatori integrali con nucleo continuo hermitiano: Compattezza.Supponiamo che K sia un operatore integrale con nucleo continuo hermitianoK(x, y). Quest’operatore trasferisce L 2 (Ω) (Ω è una regione limitata)in L 2 (Ω) (ve<strong>di</strong> il Lemma III.1) ed è autoaggiunto:(Kf, g) = (f, Kg), f, g ∈ L 2 (Ω). (IV.29)Inversamente, se un operatore integrale K con nucleo continuo K(x, y) è autoaggiunto,questo nucleo è hermitiano. Infatti, dalla (III.29) (valida anche per94
f, g ∈ C(Ω)) segue che K(x, y) e K ∗ (x, y) sono ambedue il nucleo dell’operatoreintegrale K e quin<strong>di</strong> K(x, y) = K ∗ (x, y) per ogni (x, y) ∈ Ω × Ω.Ne segue facilmente che tutti i nuclei iterati K p (x, y) <strong>di</strong> un nucleo continuohermitiano K(x, y) sono anch’essi hermitiani:K ∗ p(x, y) = (K ∗ ) p (x, y) = K p (x, y).Sia M un compatto. 1 Un sottoinsieme M (cioè, un insieme <strong>di</strong> funzionicontinue su M) si <strong>di</strong>ce equicontinuo su M se per ogni ε > 0 esiste δ > 0tale che |f(x 1 ) − f(x 2 )| < ε per ogni f ∈ M, non appena |x 1 − x 2 | < δ perx 1 , x 2 ∈ M. In particolare, f ∈ C(M) è (uniformemente) continua se e solo sel’insieme M = {f} è equicontinuo.Lemma IV.5 Un operatore integrale K con nucleo continuo K(x, y) trasferisceogni insieme limitato appartenente a L 2 (Ω) in un insieme limitato inC(Ω) e equicontinuo su Ω.Dimostrazione. Sia B un insieme limitato in L 2 (Ω): ∃A : ‖f‖ p ≤ A perogni f ∈ B. Dal Lemma III.1 segue che ‖Kf‖ C ≤ Mm(Ω) 1/2 A, f ∈ B,p = 1, 2, e quin<strong>di</strong> K trasferisce B in un insieme limitato in C(Ω). Inoltre,visto che il nucleo K(x, y) è uniformemente continuo su Ω × Ω, per un ε > 0qualsiasi esiste δ > 0 tale che|K(x ′ , y) − K(x ′′ , y)|
Dimostrazione. Come è noto, ogni sottoinsieme chiuso e limitato in R n haun sottoinsieme denso numerabile {x n : n = 1, 2, · · · }. Per ipotesi, l’insieme<strong>di</strong> numeri {f(x 1 ) : f ∈ B} è limitato. Quin<strong>di</strong> esiste una successione {f (1)k }∞ k=1tale che f (1)k(x 1) è convergente se k → ∞. Inoltre, visto che l’insieme <strong>di</strong> numeri{f (1)k (x 2) : k = 1, 2, · · · } è limitato, estraiamo dalla {f (1)k} una sottosuccessione{f (2)(2)k} tale che {fk(x 2)} è convergente. Continuando così, troviamo le successioni{f (m)k} in B, dove n = 1, 2, · · · e {f (n+1)k} è una sottosuccessione della{f (n)k}, tale che {f (n)k(x n )} è convergente se n → ∞.Consideriamo ora la successione <strong>di</strong>agonale {g k } in B dove g k = f (k)k , k =1, 2, · · · . Per un qualunque punto x i la successione numerica {g k (x i )} convergese k → ∞, poichè, per costruzione, per k ≥ i, questa successione è unasottosuccessione della successione convergente {f (i)k(x i)}.Dimostriamo ora che la successione <strong>di</strong> g k , k = 1, 2, · · · , è uniformementeconvergente su M. Supponiamo che sia ε > 0. Visto che questa successione èequicontinua su M, esiste δ > 0 tale che per k = 1, 2, · · · si ha|g k (x) − g k (x ′ )| < ε 3(IV.30)quando |x − x ′ | < δ e x, x ′ ∈ M. Essendo M compatto, dall’insieme <strong>di</strong> puntix 1 , x 2 , · · · si può scegliere un numero finito <strong>di</strong> questi punti, x 1 , x 2 , · · · , x l , l =l(ε), in modo che, per ogni punto x ∈ M esista un punto x i , 1 ≤ i ≤ l, tale che|x − x i | < δ. Ricordando che la successione <strong>di</strong> g k (x), k = 1, 2, · · · , converge aipunti x 1 , · · · , x l , conclu<strong>di</strong>amo che esiste un numero N = N(ε) tale che|g k (x i ) − g p (x i )| < ε , k, p ≥ N, i = 1, 2, · · · , l. (IV.31)3Sia ora x un punto arbitrario dell’insieme M. Scegliendo un punto x i , 1 ≤ i ≤ l,tale che |x − x i | < δ, in virtù delle (III.30) e (III.31) si ottiene|g k (x) − g p (x)| ≤ |g k (x) − g k (x i )| + |g k (x i ) − g p (x i )| + |g p (x i ) − g p (x)|< ε 3 + ε 3 + ε 3= ε, k, p ≥ N,dove N non <strong>di</strong>pende da x ∈ M. Ciò significa che la successione <strong>di</strong> g k , k =1, 2, · · · , è una successione <strong>di</strong> Cauchy in C(M). Siccome C(M) è uno spazio<strong>di</strong> Banach, la successione converge uniformemente su M.✷Il teorema <strong>di</strong> Ascoli-Arzelà esprime la proprietà <strong>di</strong> compattezza <strong>di</strong> un qualunqueinsieme limitato e equicontinuo in C(M). Inoltre, il Lemma III.5 affermache un operatore integrale con nucleo continuo trasferisce ogni insiemelimitato in L 2 (Ω) in un sottoinsieme <strong>di</strong> C(Ω) con chiusura (in C(Ω)) compatta.96
c. Equazioni integrali con nucleo continuo hermitiano: Il principiovariazionale. In questo paragrafo descriviamo i numeri caratteristici <strong>di</strong>un operatore integrale con nucleo hermitiano.Teorema IV.7 (Principio <strong>di</strong> Rayleigh-Ritz) Per ciascun nucleo continuohermitiano K(x, y) ≢ 0 l’operatore integrale K ha almeno un numero caratteristicoe il numero caratteristico λ 1 più piccolo in modulo sod<strong>di</strong>sfa il principiovariazionaleDimostrazione.Sia1|λ 1 | = sup0≠f∈L 2 (Ω)ν = sup ‖Kf‖ 2 .‖f‖ 2 =1‖Kf‖ 2‖f‖ 2. (IV.32)(IV.33)Dalla (III.8) segue che ‖Kf‖ 2 ≤ M m(Ω) sulle funzioni <strong>di</strong> L 2 (Ω) <strong>di</strong> norma1 e quin<strong>di</strong> ν ≤ M m(Ω). È inoltre evidente che ν ≥ 0. Dimostriamo cheν > 0. Infatti, se ν = 0, allora, in virtù della (III.33), avremmo ‖Kf‖ 2 = 0,cioè Kf = 0 per tutte le f ∈ L 2 (Ω), e quin<strong>di</strong> K(x, y) = 0, x, y ∈ Ω, il checontrad<strong>di</strong>ce l’ipotesi.Dalla definizione della ν segue l’esistenza <strong>di</strong> una successione <strong>di</strong> f k , k =1, 2, · · · , ‖f k ‖ 2 = 1, tale che‖Kf k ‖ 2 → ν, k → +∞; (IV.34)inoltre, è valida la <strong>di</strong>suguaglianza( )∥ ‖K 2 f‖ 2 =Kf ∥∥∥2∥ K ‖Kf‖ 2 ≤ ν‖Kf‖ 2 ,‖Kf‖ 2f ∈ L 2 (Ω). (IV.35)Dimostriamo ora cheK 2 f k − ν 2 f k → 0, k → +∞, in L 2 (Ω). (IV.36)Infatti, utilizzando le (III.29), (III.34) e (III.35), si ottiene‖K 2 f k − ν 2 f k ‖ 2 2 = (K 2 f k − ν 2 f k , K 2 f k − ν 2 f k )= (K 2 f k , K 2 f k ) + ν 4 (f k , f k ) − ν 2 (f k , K 2 f k ) − ν 2 (K 2 f k , f k )= ‖K 2 f k ‖ 2 2 + ν 4 − 2ν 2 (Kf k , Kf k )≤ ν 2 ‖Kf k ‖ 2 2 + ν 4 − 2ν 2 ‖Kf k ‖ 2 2= ν 4 − ν 2 ‖Kf k ‖ 2 2 → 0, k → +∞,il che è equivalente alla relazione limite (III.36).97
Conformemente al Lemma III.5, la successione delle funzioni Kf k , k =1, 2, · · · , è limitata in C(Ω) e equicontinua su Ω. Ma in questo caso, in baseal teorema <strong>di</strong> Ascoli-Arzelà, esiste anche una sottosuccessione ψ i = Kf ki ,i = 1, 2, · · · , che converge in C(Ω) ad una funzione ψ ∈ C(Ω), ‖ψ − ψ i ‖ C → 0,i → ∞. Da ciò, utilizzando le (III.6) e (III.7), e la relazione (III.36), si ottiene‖K 2 ψ − ν 2 ψ‖ C ≤ ‖K 2 (ψ − ψ i )‖ C + ν 2 ‖ψ − ψ i ‖ C + ‖K 2 ψ i − ν 2 ψ i ‖ C≤ M m(Ω)‖K(ψ − ψ i )‖ C + ν 2 ‖ψ − ψ i ‖ C + ‖K(K 2 f ki − ν 2 f ki )‖ C≤ (M 2 m(Ω) 2 + ν 2 )‖ψ − ψ i ‖ C + M √ m(Ω)‖K 2 f ki − ν 2 f ki ‖ 2 → 0, i → +∞,e, <strong>di</strong> conseguenza,K 2 ψ = ν 2 ψ.Dimostriamo che ψ ≠ 0. Dalla relazione limite (III.36) segue cheKψ i − ν 2 f ki → 0,i → +∞ in L 2 (Ω),e, <strong>di</strong> conseguenza, ‖Kψ i ‖ 2 → ν 2 , i → +∞. D’altra parte, dal Lemma III.1segue che ‖Kψ i ‖ 2 → ‖Kψ‖ 2 , i → +∞. Quin<strong>di</strong>, ‖Kψ‖ 2 = ν 2 > 0, da cui segueche ψ ≠ 0.Dunque, la funzione ψ costruita è un’autofunzione del nucleo K 2 (x, y) corrispondenteall’autovalore ν 2 . Ma, allora, almeno uno dei numeri ±ν è autovaloredel nucleo K(x, y). In tal modo, il numero caratteristico λ 1 costruito èuguale a 1/ν in modulo e, quin<strong>di</strong>, in virtù della (III.33), sod<strong>di</strong>sfa il principiovariazionale (III.32).Non resta altro che stabilire che λ 1 è il numero caratteristico più piccolo inmodulo del nucleo K(x, y). Infatti, se λ 0 e ϕ 0 sono il numero caratteristico e lacorrispondente autofunzione, cioè λ 0 Kϕ 0 = ϕ 0 , allora, in virtù della (III.32),si ha1λ 1=supf∈L 2 (Ω)‖Kf‖ 2‖f‖ 2≥ ‖Kϕ 0‖ 2‖ϕ 0 ‖ 2= 1|λ 0 | ,e quin<strong>di</strong> |λ 1 | ≤ |λ 0 |.✷Considerando il teorema sopra <strong>di</strong>mostrato, per le equazioni integrali connucleo continuo hermitiano K(x, y) ≢ 0, si ottengono le seguenti asserzioni:L’insieme dei numeri caratteristici {λ k } non è vuoto, è situato sull’assereale, e non ha punti <strong>di</strong> accumulazione finiti; ogni numero caratteristicoè <strong>di</strong> moltiplicità finita ed il sistema <strong>di</strong> autofunzioni {ϕ k } può essere sceltoortonormale:(ϕ k , ϕ i ) = δ k,i . (IV.37)98
Se λ ≠ λ k , k = 1, 2, · · · , l’equazione (III.28) è univocamente risolvibile per untermine noto f ∈ C(Ω) qualsiasi. Se λ = λ k , per la risolvibilità dell’equazione(III.28) è necessario e sufficiente che(f, ϕ k+1 ) = 0, i = 0, 1, · · · , r k − 1, (IV.38)dove ϕ k , ϕ k+1 , · · · , ϕ k+rk −1 sono autofunzioni corrispondenti al numero caratteristicoλ k e r k è la moltiplicità <strong>di</strong> λ k .Sia K(x, y) ≢ 0 un nucleo integrale hermitiano e sia K il corrispondenteoperatore integrale in L 2 (Ω). Allora esistono un numbero caratteristico 0 ≠λ 1 ∈ R e un’autofunzione ϕ 1 ∈ L 2 (Ω) <strong>di</strong> norma 1 tali chePoniamo1|λ 1 | = sup ‖Kf‖ 2 = ‖Kϕ 1 ‖.‖f‖ 2 =1K 1 (x, y) = K(x, y) − ϕ 1(x)ϕ 1 (y)λ 1.Se K 1 (x, y) ≡ 0, allora λ 1 è l’unico numero caratteristico <strong>di</strong> K e K(x, y) =ϕ 1 (x)ϕ 1 (y)/λ 1 è un nucleo degenere. Se K 1 (x, y) ≢ 0 e K 1 è il corrispondenteoperatore integrale, allora esistono un numero caratteristico 0 ≠ λ 2 ∈ R con|λ 1 | ≤ |λ 2 | e un’autofunzione ϕ 2 ∈ L 2 (Ω) <strong>di</strong> norma 1 e ortogonale a ϕ 1 tali chePoniamo1|λ 2 | = sup ‖K 1 f‖ 2 = ‖Kϕ 2 ‖.‖f‖ 2 =1K 2 (x, y) = K 1 (x, y) − ϕ 2(x)ϕ 2 (y)λ 2.Se K 2 (x, y) ≡ 0, allora λ 1 e λ 2 sono gli unici numeri caratteristici <strong>di</strong> K eK(x, y) =2∑j=1ϕ j (x)ϕ j (y)λ j.Se K 2 (x, y) ≢ 0 e K 2 è il corrispondente operatore integrale, allora esistonoun numero caratteristico 0 ≠ λ 3 ∈ R con |λ 1 | ≤ |λ 2 | ≤ |λ 3 | e un’autofunzioneϕ 3 ∈ L 2 (Ω) <strong>di</strong> norma 1 e ortogonale a ϕ 1 e ϕ 2 tali che1|λ 3 | = sup ‖K 2 f‖ 2 = ‖Kϕ 3 ‖,‖f‖ 2 =199
ECC. Supponiamo <strong>di</strong> aver trovato i numeri caratteristici λ 1 , . . . , λ p (con 0
Stu<strong>di</strong>amo ora la con<strong>di</strong>zione sotto cui è una base ortonormale il sistemaortonormale delle autofunzioni ϕ j . Se Kψ = 0, allora(ψ, ϕ j ) = 1 λ j(ψ, Kϕ j ) = 1 λ j(Kψ, ϕ j ) = 0.D’altra parte, se (ψ, ϕ j ) = 0 per ogni j, alloraKψ = ∑ j(ψ, ϕ j )ϕ j = 0.In altre parole,{ψ ∈ L 2 (Ω) : Kψ = 0} = {ψ ∈ L 2 (Ω) : ψ ⊥ ϕ j per ogni j}.Di conseguenza, {ϕ j } ∞ j=1 è una base ortonormale se e solo se ψ = 0 è l’unicovettore ortogonale a tutte le autofunzioni ϕ j se e solo se ψ = 0 è l’unico vettoretale che Kψ = 0. Dunque {ϕ j } ∞ j=1 è base ortonormale <strong>di</strong> L 2 (Ω) se e solo sezero non è autovalore <strong>di</strong> K.4 Teorema <strong>di</strong> Hilbert-SchmidtSupponiamo che λ 1 , λ 2 , · · · siano i numeri caratteristici del nucleo continuohermitiano K(x, y) ≢ 0 <strong>di</strong>sposti in or<strong>di</strong>ne <strong>di</strong> crescita del loro modulo, |λ 1 | ≤|λ 2 | ≤ · · · , e che ϕ 1 , ϕ 2 , · · · siano le corrispondenti autofunzioni ortonormali,(ϕ k , ϕ i ) = δ kl .Come sappiamo, i numeri caratteristici λ k sono reali e le autofunzioni ϕ k (x)sono continue su Ω; in questo caso l’insieme {λ k } è finito o numerabile; nell’ultimocaso si ha |λ k | → ∞, k → ∞. Inoltre, in virtù della (III.32), è validala <strong>di</strong>suguaglianzaNotiamo un’altra <strong>di</strong>suguaglianza, e cioè 4∞∑k=1‖Kf‖ 2 ≤ 1|λ 1 | ‖f‖ 2, f ∈ L 2 (Ω). (IV.39)|ϕ k (x)| 2λ 2 k∫≤Ω|K(x, y)| 2 dy, x ∈ Ω. (IV.40)Nel seguito verrà infatti <strong>di</strong>mostrato che vale l’uguaglianza nella (III.40).4 Se il nucleo K(x, y) ha un numero finito <strong>di</strong> numeri caratteristici , λ 1 , λ 2 , · · · , λ N , poniamoλ k = +∞ per k > N.101
Introduciamo ora la successione <strong>di</strong> nuclei continui hermitianiK (p) (x, y) = K(x, y) −p∑i=1ϕ i (x)ϕ i (y)λ i, p = 1, 2, · · · , . (IV.41)I corrispondenti operatori integrali K (p) hermitiani sod<strong>di</strong>sfanoK (p) f = Kf −p∑i=1(f, ϕ i )λ iϕ i , f ∈ L 2 (Ω). (IV.42)Dimostriamo che λ p+1 , λ p+2 , · · · , e ϕ p+1 , ϕ p+2 , · · · costituiscono tutti i numericaratteristici e tutte le autofunzioni del nucleo K (p) (x, y). Infatti, in virtùdella (III.42) abbiamoK (p) ϕ k = Kϕ k −p∑i=1(ϕ k , ϕ i )λ iϕ i = Kϕ k = 1 λ kϕ k , k ≥ p + 1,<strong>di</strong> modo che λ k e ϕ k , k ≥ p + 1, siano numeri caratteristici ed autofunzioni delnucleo K (p) (x, y). Inversamente, siano λ 0 e ϕ 0 un numero caratteristico e lacorrispondente autofunzione del nucleo K (p) (x, y), e cioè, in virtù della (III.42),si avràp∑ϕ 0 = λ 0 K (p) (ϕ 0 , ϕ 0 )ϕ 0 = λ 0 Kϕ 0 − λ 0ϕ i . (IV.43)λ iDa qui per k = 1, 2, · · · , p si ottienei=1(ϕ 0 , ϕ k ) = λ 0 (Kϕ 0 , ϕ k ) − λ 0p∑i=1= λ 0 (ϕ 0 , Kϕ k ) − λ 0p∑i=1(ϕ 0 , ϕ i )(ϕ i , ϕ k )λ i(ϕ 0 , ϕ i )λ iδ ik = λ 0λ k(ϕ 0 , ϕ k ) − λ 0λ k(ϕ 0 , ϕ k ) = 0,e quin<strong>di</strong>, in virtù della (III.43), λ 0 = λ 0 Kϕ 0 . Dunque, λ 0 e ϕ 0 sono il numerocaratteristico e la corrispondente autofunzione del nucleo K(x, y). Visto cheϕ 0 è ortogonale a tutte le autofunzioni ϕ 1 , ϕ 2 , · · · , ϕ p , ne segue che λ 0 coincidecon uno de numeri caratteristici λ p+1 , λ p+2 , · · · e ϕ 0 può essere consideratauguale a ϕ k per k ≥ p + 1. Dunque, λ p+1 è il numero caratteristico più piccolodel nucleo K (p) (x, y) in modulo. Applicando la <strong>di</strong>suguaglianza (III.39) a questonucleo e tenendo conto della (III.42), si ottiene la <strong>di</strong>suguaglianza‖K (p) f‖ 2 =∥ Kf −p∑i=1(f, ϕ i )λ iϕ i∥ ∥∥∥∥2≤ ‖f‖ 2|λ p+1 | , f ∈ L2 (Ω), (IV.44)102
dove p = 1, 2, · · · .Supponiamo che il nucleo hermitiano K(x, y) abbia un numero finito <strong>di</strong>numeri caratteristici: λ 1 , λ 2 , · · · , λ N . Da quanto abbiamo <strong>di</strong>mostrato, il nucleohermitiano K (N) (x, y) non ha numeri caratteristici, e quin<strong>di</strong>, in base al TeoremaIII.7, si ha K (N) (x, y) ≡ 0, in modo che, in virtù della (III.41), si haK(x, y) =N∑i=1ϕ i (x)ϕ i (y)λ i, (IV.45)il che significa che il nucleo K(x, y) è degenere.Da ciò, e ricordando anche che un nucleo degenere ha sempre un numerofinito <strong>di</strong> numeri caratteristici, formuliamo il seguente risultato: affinché unnucleo continuo hermitiano sia degenere, è necessario e sufficiente che questonucleo abbia un numero finito <strong>di</strong> numeri caratteristici.Dimostriamo che il nucleo iterato K 2 (x, y) <strong>di</strong> un nucleo continuo hermitianoK(x, y) può essere sviluppato in una serie bilineare in termini delleautofunzioni <strong>di</strong> questo nucleo,K 2 (x, y) =∞∑k=1ϕ k (x)ϕ k (y), (IV.46)λ 2 ke la serie è uniformemente convergente su Ω × Ω.Tenendo conto del fatto che, in virtù della (III.17), si ha∫∫∫K 2 (x, y)= K(x, y ′ )K(y ′ , x) dy ′ = K(x, y ′ )K(x, y ′ ) dy ′ =Ωsi ottiene l’uguaglianza∞∑k=1|ϕ k (x)| 2λ 2 kΩ∫=Ω|K(x, y)| 2 dy.Ω|K(x, y)| 2 dy,(IV.47)Dal teorema <strong>di</strong> Dini 5 segue che la serie (III.47) è uniformemente convergente inx ∈ Ω, poichè la parte a destra è una funzione continua in x ∈ Ω. Integrandotermine a termine la serie uniformemente convergente (III.47) e tenendo contodella normalizzazione delle autofunzioni, si ottiene la formula∞∑k=11λ 2 k∫=Dimostriamo or il seguente risultato.Ω∫Ω|K(x, y)| 2 dxdy.(IV.48)5 Teorema <strong>di</strong> Dini: Sia {f n } ∞ n=1 una successione crescente <strong>di</strong> funzioni continue definitesu un compatto. Se esiste f(x) = lim n→∞ f n (x) e f è continua sul compatto, allora laconvergenza è uniforme.103
Teorema IV.8 (Teorema <strong>di</strong> Hilbert-Schmidt) Se una funzione f appartieneall’immagine <strong>di</strong> un operatore integrale K <strong>di</strong> nucleo continuo hermitianoK(x, y), cioè f = Kh, la sua serie in termini delle autofunzioni del nucleoK(x, y) è uniformemente convergente su G alla funzionef(x) =∞∑(f, ϕ k )ϕ k (x) =k=1∞∑k=1(h, ϕ k )λ kϕ k (x). (IV.49)Dimostrazione. Visto che f = Kh, h ∈ L 2 (G), in base al Lemma III.1,f ∈ C(G) ed i coefficienti <strong>di</strong> Fourier delle funzioni f e h in termini delleautofunzioni {ϕ k } del nucleo K(x, y) sono collegati con la relazione(f, ϕ k ) = (Kh, ϕ k ) = (h, Kϕ k ) = (h, ϕ k)λ k. (IV.50)Se il nucleo K(x, y) ha un numero finito <strong>di</strong> autovalori, si ha, in virtù della(III.45),N∑ (h, ϕ k )f(x) = (Kh)(x) =ϕ k (x),λ ked il teorema <strong>di</strong> Hilbert-Schmidt è <strong>di</strong>mostrato.Supponiamo ora che il nucleo K(x, y) abbia un numero infinito <strong>di</strong> autovalori.In questo caso |λ k | → +∞, k → +∞. Perciò la serie (III.49) converge a fnella norma <strong>di</strong> L 2 (G):∥ f −∥ p∑ ∥∥∥∥ (f, ϕ k )ϕ k =∥ Kh −2k=1p∑k=1k=1∥(h, ϕ k ) ∥∥∥∥ϕ k ≤ ‖h‖ 2λ k |λ p+1 |2→ 0, p → +∞.Resta da <strong>di</strong>mostrare che la serie (III.49) converge in modo uniforme su G.Utilizzando la <strong>di</strong>suguaglianza <strong>di</strong> Schwartz e la (III.40), si ottiene, per tutti ivalori <strong>di</strong> p e q e per ogni x ∈ G,≤q∑∣ |(h, ϕ k )|ϕ k (x) ∣∣∣∣ ≤λ k[ q∑] 1/2 [∫|(h, ϕ k )| 2k=pk=pG[ q∑k=p|(h, ϕ k )| 2 ] 1/2 [ q∑k=p|ϕ k (x)| 2λ 2 k|K(x, y)| 2 dy] 1/2≤ M √ m(G)] 1/2[ q∑k=p|(h, ϕ k )| 2 ] 1/2.(IV.51)Il primo membro della <strong>di</strong>suguaglianza (III.51) tende a zero per p, q → +∞.Ciò significa che la serie (III.49) è puntualmente convergente su G. Siccome ilmaggiorante in (III.51) non <strong>di</strong>pende da x ∈ G, la convergenza risulta uniformein x ∈ G.✷104
Capitolo VPROBLEMI <strong>DI</strong>STURM-LIOUVILLEPrima <strong>di</strong> stu<strong>di</strong>are alcuni problemi al contorno per le equazioni <strong>di</strong> tipo ellittico(in particolare le equazioni <strong>di</strong> Laplace, <strong>di</strong> Poisson, delle onde e <strong>di</strong> Schrö<strong>di</strong>ngernello spazio e nel piano), trattiamo i corrispondenti problemi uni<strong>di</strong>mensionali.1 Problema <strong>di</strong> Sturm-LiouvilleIl cosiddetto problema <strong>di</strong> Sturm-Liouville ha la forma 1Lu def≡ −(pu ′ ) ′ + qu = λu, 0 < x < l, (V.1)h 1 u(0) − h 2 u ′ (0) = 0, H 1 u(l) + H 2 u ′ (l) = 0, (V.2)dove h 1 , h 2 , H 1 , H 2 sono costanti non negative tali che h 1 + h 2 > 0 e H 1 + H 2 >0. 2 Assumiano che p ∈ C 1 [0, l], p(x) > 0 per ogni x ∈ [0, l], e q ∈ C[0, l] èreale. Come dominio dell’operatore L pren<strong>di</strong>amo⎧⎫⎨u ′′ ∈ L 2 (0, l) ⎬M L =⎩ u ∈ C2 (0, l) ∩ C 1 [0, l] : h 1 u(0) − h 2 u ′ (0) = 0H 1 u(l) + H 2 u ′ ⎭ .(l) = 0Se h 2 = H 2 = 0 (cioè u(0) = u(l) = 0), abbiamo le con<strong>di</strong>zioni <strong>di</strong> Dirichlet.Se h 1 = H 1 = 0 (cioè u ′ (0) = u ′ (l)), stiamo parlando delle con<strong>di</strong>zioni <strong>di</strong>Neumann. Gli altri casi si <strong>di</strong>cono con<strong>di</strong>zioni miste oppure con<strong>di</strong>zioni <strong>di</strong> Robin.1 Ci limitiamo ora al problema <strong>di</strong> Sturm-Liouville con con<strong>di</strong>zioni al contorno separate.2 Potremmo scegliere angoli α, β ∈ [0, π 2 ] tali che h 1 = cos α, h 2 = sin α, H 1 = cos β eH 2 = sin β.105
L’operatore L è hermitiano, cioè (Lf, g) = (f, Lg) per ogni f, g ∈ M L .Infatti,(Lf, g) − (f, Lg) =∫ l0[−(pf ′ ) ′ g + qfg] dx −∫ l0[−f(pg ′ ) ′ + f(qg)] dx∫ l= [−(pf ′ )g + f(pg ′ )] l 0 + [pf ′ g ′ − f ′ pg ′ ] dx= [−(pf ′ )g + f(pg ′ )] l 0 = [p(fg′ − f ′ g)] l 0 ,la quale si cancella se le con<strong>di</strong>zioni (IV.2) sono ambedue <strong>di</strong> tipo Dirichlet oNeumann (se non valgono h 1 , h 2 ∈ (0, 1) e H 1 , H 2 ∈ (0, 1)). Per h 2 , H 2 >0, sostituiamo f ′ (l) = (−H 1 /H 2 )f(l) e f ′ (0) = (h 1 /h 2 )f(0) e analogamenteg ′ (l) = (−H 1 /H 2 )g(l) e g ′ (0) = (h 1 /h 2 )g(0), risultando in (Lf, g)−(f, Lg) = 0.L’integrale d’energia assume la seguente forma:∫ l((Lf, f) = p|f ′ | 2 + q|f| 2) dx + h 1p(0)|f(0)| 2 + H 1p(l)|f(l)| 2 , f ∈ M L ,0h 2 H 2(V.3)dove gli ultimi termini del secondo membro si annullano per h 2 = 0 o per H 2 =0, rispettivamente. Se q(x) ≥ q min per ogni x ∈ [0, l], l’integrale d’energia(Lf, f) sod<strong>di</strong>sfa(Lf, f) ≥ q min ‖f‖ 2 2, f ∈ M L .Quin<strong>di</strong> tutti gli autovalori <strong>di</strong> L (che hanno un’autofunzione in M L ) sono realie cadono nell’intervallo [q min , +∞). Se q min fosse un autovalore <strong>di</strong> L con lacorrispondente autofunzione 0 ≠ f ∈ M L , allora la (IV.3) implicherebbe chevalgono le con<strong>di</strong>zioni <strong>di</strong> Neumann negli estremi dell’intervallo (h 2 = H 2 = 0),q(x) ≡ q min è costante e l’autofunzione stessa è constante. In tutti gli altricasi gli autovalori cadono nell’intervallo (q min , +∞).01.1 Funzione <strong>di</strong> GreenSupponiamo che λ = 0 non sia un autovalore dell’operatore L. Consideriamoil problema al contornoLu ≡ −(pu ′ ) ′ + qu = f(x), 0 < x < l, (V.4)h 1 u(0) − h 2 u ′ (0) = 0, H 1 u(l) + H 2 u ′ (l) = 0, (V.5)dove f ∈ C(0, l) ∩ L 2 (0, l). Dato che λ = 0 non è autovalore dell’operatore L,la soluzione del problema al contorno (IV.4)-(IV.5) nella classe M L è unica.Costruiamo ora la soluzione <strong>di</strong> questo problema.106
Siano v 1 e v 2 soluzioni non nulle (reali) dell’equazione omogenea Lv = 0che sod<strong>di</strong>sfano le con<strong>di</strong>zionih 1 v 1 (0) − h 2 v ′ 1(0) = 0, H 1 v 2 (l) + H 2 v ′ 2(l) = 0. (V.6)Dalla teoria delle equazioni <strong>di</strong>fferenziali lineari or<strong>di</strong>narie segue che queste soluzioniesistono ed appartengono alla classe C 2 [0, l]. Le soluzioni lineari v 1 e v 2sono linearmente in<strong>di</strong>pendenti. Infatti, nel caso contrario v 1 (x) = cv 2 (x) perqualche 0 ≠ c ∈ R e, <strong>di</strong> conseguenza, in base alla (IV.6) la soluzione v 1 sod<strong>di</strong>sfaanche la seconda con<strong>di</strong>zione al contorno (IV.5). Ciò significa che v 1 è un’autofunzionedell’operatore L corrispondente all’autovalore λ = 0, contrariamenteall’ipotesi; inoltre segue che in tal caso v 1 ∈ M L . Perciò il determinanteWronskiano vale[ ]v1 (x) vw(x) = det2 (x)v 1(x)′ v 2(x)′ ≠ 0, x ∈ [0, l].Allora ò (pw) ′ (x) = (v 1 (pv ′ 2)−v 2 (pv ′ 1)) ′ = v 1 (pv ′ 2) ′ −v 2 (pv ′ 1) ′ = −v 1 qv 2 +v 2 qv 1 ≡0. Quin<strong>di</strong> risulta l’identitàpw ≡ p(0)w(0), x ∈ [0, l]. (V.7)Cercheremo la soluzione del problema (IV.4)-(IV.5) per mezzo del metododella variazione delle costanti,u(x) = c 1 (x)v 1 (x) + c 2 (x)v 2 (x).Allora c ′ 1(x) e c ′ 2(x) sod<strong>di</strong>sfano il sistema lineare[ ] [ ] [ ]v1 (x) v 2 (x) c′1 (x) 0v 1(x)′ v 2(x)′ c ′ =2(x) −f(x)/p(x)(V.8)(V.9)con determinante w(x) ≠ 0. Risolvendo questo sistema ed utilizzando l’identità(IV.7), si ottienec ′ 1(x) = v 2(x)f(x)pw, c ′ 2(x) = − v 1(x)f(x). (V.10)pwPer sod<strong>di</strong>sfare le con<strong>di</strong>zioni al contorno (IV.5), osserviamo che esistono duecostanti d’integrazione c 1 e c 2 tali cheu(x) = c 1 v 1 (x) + c 2 v 2 (x) − v 1(x)pw∫ lxv 2 (y)f(y) dy − v 2(x)pw107∫ x0v 1 (y)f(y) dy.
Calcolando la derivata si trovau ′ (x) = c 1 v ′ 1(x) + c 2 v ′ 2(x) − v′ 1(x)pw∫ lxf(y)v 2 (y) dy − v′ 2(x)pwTenendo conto dalle con<strong>di</strong>zioni (IV.6), otteniamo0 = h 1 u(0) − h 2 u ′ (0) = c 1 [h 1 v 2 (0) − h 2 v ′ 2(0)] ;∫ x0 = H 1 u(l) + H 2 u ′ (l) = c 1 [H 1 v 2 (l) + H 2 v ′ 2(l)] ,0v 1 (y)f(y) dy.e quin<strong>di</strong>, in virtù del fatto che le espressioni tra parentesi quadrate non siannullano, troviamo c 1 = c 2 = 0. In altre parole,u(x) =∫ l0G(x, y)f(y) dy,(V.11)dove{G(x, y) = − 1 v 1 (x)v 2 (y), 0 ≤ x < y ≤ l,pw v 2 (x)v 1 (y), 0 ≤ y < x ≤ l,= − 1pw v 1(min(x, y))v 2 (max(x, y)).(V.12)La funzione G(x, y) è detta funzione <strong>di</strong> Green del problema al contorno (IV.4)-(IV.5) o dell’operatore L. Questo nucleo è reale, simmetrico e continuo.Inoltre, vale l’uguaglianza∂G(y + 0, y)∂x−∂G(y − 0, y)∂x= − w(y)pw = − 1 , y ∈ (0, l). (V.13)p(y)Consideriamo l’operatore integrale G su L 2 (0, l) con nucleo G(x, y). Alloraquesto nucleo è reale, simmetrico e continuo. Dunque G è un operatore lineareautoaggiunto sullo spazio <strong>di</strong> Hilbert L 2 (0, l). Siccome u = Gf appartiene adM L per ogni f ∈ C(0, l) ∩ L 2 (0, l), il dominio M L è strettamente contenutonell’immagine dell’operatore integrale G. Ne segue facilmente che l’immagine<strong>di</strong> G (cioè, {Gf : f ∈ L 2 (0, l)}) coincide con il dominio dell’estensioneautoaggiunta L <strong>di</strong> L. Infatti, L = G −1 .M L = D(L)⏐imm. ↓L−−−→ C[0, l]⏐⏐↓imm.G[L 2 (0, l)] = D(L) −−−−→L=G −1 L 2 (0, l)108
Nel caso in cui λ = 0 è autovalore del problema (IV.4)-(IV.5), bisognascegliere qualche µ ∈ R che non è autovalore, e riscrivere (IV.4)-(IV.5) nellaforma equivalente(L − µ)u ≡ −(pu ′ ) ′ + (q − µ)u = f(x) − µu(x), 0 < x < l, (V.14)h 1 u(0) − h 2 u ′ (0) = 0, H 1 u(l) + H 2 u ′ (l) = 0. (V.15)Partendo dalle due soluzioni v 1 e v 2 dell’equazione omogenea (L − µ)u = 0che sod<strong>di</strong>sfano le con<strong>di</strong>zioni (IV.6) e quin<strong>di</strong> sono linearmente in<strong>di</strong>pendenti,arriviamo ad una funzione <strong>di</strong> Green G(x, y; µ) ed un operatore integrale G(µ)<strong>di</strong>pendente <strong>di</strong> µ tali cheu = G(µ) [f − µu] .Quest’ultima si può scrivere nella forma dell’equazione integrale <strong>di</strong> Fredholmu(x) + µ∫ l0G(x, y; µ)u(y) dy =∫ l0G(x, y; µ)f(y) dy,0 ≤ x ≤ l. (V.16)Il dominio dell’estensione autoaggiunta L <strong>di</strong> L [o <strong>di</strong> L − µ] coincide conl’immagine dell’operatore integrale G(µ).Esempio V.9 Consideriamo il problema <strong>di</strong> Sturm-Liouville−u ′′ = f(x), h 1 u(0) − h 2 u ′ (0) = 0, H 1 u(l) + H 2 u ′ (l) = 0.Le soluzioni v 1 e v 2 dell’equazione omogenea −u ′′ = 0 che sod<strong>di</strong>sfano lecon<strong>di</strong>zioni (IV.6), hanno la forma (tranne un fattore costante)v 1 (x) = h 1 x + h 2 , v 2 (x) = H 1 l + H 2 − H 1 x,e quin<strong>di</strong> w(x) = −h 1 (H 1 l + H 2 ) − h 2 H 1 si annulla se e solo se h 1 = H 1 = 0(cioè, con<strong>di</strong>zioni <strong>di</strong> Neumann in ambedue gli estremi). Se h 1 +H 1 > 0, si trovaper la funzione <strong>di</strong> Green⎧1⎪⎨[h 1 x + x 2 ][H 1 (l − y) + H 2 ], 0 ≤ x < y ≤ l,hG(x, y)= 1 (H 1 l + H 2 ) + h 2 H 11⎪⎩[H 1 (l − x) + H 2 ][h 1 y + h 2 ], 0 ≤ y < x ≤ l.h 1 (H 1 l + H 2 ) + h 2 H 1Per trovare gli autovalori, cerchiamo le soluzioni v 1 (x, λ) e v 2 (x, λ) dell’equazioneomogenea −u ′′ = λu che sod<strong>di</strong>sfano le con<strong>di</strong>zioni (IV.6), mentreλ > 0. Otteniamov 1 (x, λ) = h 2√λ cos(x√λ) + h1 sin(x √ λ);v 2 (x, λ) = H 2√λ cos((l − x)√λ) + H1 sin((l − x) √ λ),109
e quin<strong>di</strong>w(x) = v 1 (0, λ)v 2(0, ′ λ) − v 1(0, ′ λ)v 2 (0, λ)= √ [λ (h 2 H 2 λ − h 1 H 1 ) sin(l √ λ) − (h 2 H 1 + h 1 H 2 ) √ λ cos(l √ ]λ) .Un numero λ > 0 è autovalore se e solo se w(x) ≡ 0. Sotto le con<strong>di</strong>zioni <strong>di</strong>Dirichlet (h 2 = H 2 = 0) e sotto quelle <strong>di</strong> Neumann (h 1 = H 1 = 0) seguesin(l √ λ) = 0.Quin<strong>di</strong> gli autovalori e le autofunzioni sono( nπx( nπ)⎧⎪ n = 1, 2, 3, · · · , u2 ⎨n (x) = sinlλ n = ,l ⎪( ⎩ nπxn = 0, 1, 2, · · · , u n (x) = cosl), [Dirichlet]). [Neumann]Sotto le altre con<strong>di</strong>zioni (cioè, se h 2 H 1 + h 1 H 2 > 0), λ = 0 non è mai autovaloree λ > 0 è autovalore se e solo se è una ra<strong>di</strong>ce positiva dell’equazionetranscedente 3 cotg (l √ λ) = h 2H 2 λ − h 1 H 1(h 2 H 1 + h 1 H 2 ) √ λ .C’è un numero infinito <strong>di</strong> tali ra<strong>di</strong>ci (infatti, una successione crescente λ n chetende a +∞) ed ogni ra<strong>di</strong>ce corrispondente all’autofunzioneu n (x, λ) = h 2√λn cos(x √ λ n ) + h 1 sin(x √ λ n ).Le ra<strong>di</strong>ci √ λ n si trovano più facilmente nel modo grafico. Non ci sono autovalorifuori dell’intervallo [0, +∞).1.2 Riduzione ad un’equazione integraleFacciamo vedere che il problema <strong>di</strong> Sturm-Liouville può essere ridotto adun’equazione integrale <strong>di</strong> Fredholm con nucleo reale, simmetrico e continuoG(x, y).Teorema V.10 Il problema al contornoLu = λu + f, u ∈ D(L), f ∈ C(0, l) ∩ L 2 (0, l), (V.17)3 Ponendo x = √ λ, α = h 2 H 1 + h 1 H 2 > 0, β = h 2 H 2 ≥ 0 e γ = h 1 H 1 ≥ 0 con β + γ > 0,si vede subito che i grafici <strong>di</strong> (αx)/(βx 2 − γ) e tg (lx) hanno un numero infinito <strong>di</strong> punti <strong>di</strong>intersezione x > 0.110
543210−1−2−3−4−50 0.5 1 1.5 2 2.5 3kFigura V.1: Il plot contiene i grafici delle funzioni y = tan(xL) e y =−k tan α per L = 5 e α = π.Gli autovalori sono i valori <strong>di</strong>3k > 0 corrispondenti ai loro punti <strong>di</strong> intersezione.con la con<strong>di</strong>zione che λ = 0 non sia un autovalore dell’operatore L è equivalenteall’equazione integrale∫ l∫ lu(x) = λ G(x, y)u(y) dy + G(x, y)f(y) dy, u ∈ L 2 (0, l), (V.18)00dove G(x, y) è la funzione <strong>di</strong> Green dell’operatore L. Inoltre, le soluzioni u deiproblemi equivalenti (IV.17) e (IV.18) appartengono ad M L .Dimostrazione.alloraSe u(x) è una soluzione del problema al contorno (IV.17),u(x) = (G[λu + f])(x) =∫ l0G(x, y)[λu(y) + f(y)] dy, 0 ≤ x ≤ l,cioè u(x) sod<strong>di</strong>sfa l’equazione integrale (IV.18).Inversamente, supponiamo che la funzione u 0 ∈ L 2 (0, l) sod<strong>di</strong>sfi l’equazioneintegrale (IV.18). Se G denota l’operatore integrale con nucleo G(x, y), allorau 0 = G(λu 0 + f) ∈ D(L) e Lu 0 = λu 0 + f. Dall’uguaglianza∫ l∫ xv 1 (x) v 2 (y)[λu 0 (y) + f(y)] dy+v 2 (x) v 1 (y)[λu 0 (y) + f(y)] dyx0u 0 (x) = −p(0)w(0)111
segue che u 0 ∈ C[0, l], poichè le funzioni sotto il segno degli integrali appartengonoad L 1 (0, l). In tal caso segue dall’equazione precedente che u 0 ∈ C 1 [0, l]con derivatav 1(x)′u ′ 0(x)=−∫ lx∫ xv 2 (y)[λu 0 (y) + f(y)] dy+v 2(x)′ 0p(0)w(0)v 1 (y)[λu 0 (y) + f(y)] dy.Da quell’ultima equazione segue che u 0 ∈ C 2 [0, l]. Inoltre, dalla (IV.6) segueche u 0 (x) sod<strong>di</strong>sfa le con<strong>di</strong>zioni al contorno (IV.2). Dunque u 0 ∈ M L . Diconseguenza, Lu 0 = Lu 0 = λu 0 + f.✷Applicando il teorema precedente al caso f = 0, conclu<strong>di</strong>amo che ogniautofunzione dell’operatore L (in principio appartenente a D(L)) appartiene adM L . Inoltre, tutte le autofunzioni appartengono a C[0, l]. Quin<strong>di</strong> il problemaal contorno per f = 0 (cioè, il problema agli autovalori) è equivalente a quelloagli autovalori dell’equazione integrale omogenea∫ lu(x) = λ G(x, y)u(y) dy0(V.19)in C[0, l] oppure in L 2 (0, l), a con<strong>di</strong>zione che λ = 0 non sia autovalore dell’operatoreL.Eliminiamo ora l’ipotesi che λ = 0 non sia un autovalore dell’operatore L.Per farlo, sia µ 0 ∈ R un numero che non è un autovalore. Allora µ = 0 non èun autovalore del problema <strong>di</strong> Sturm-LiouvilleL 1 u ≡ −(pu ′ ) ′ + (q − µ 0 )u = µu,(V.20)h 1 u(0) − h 2 u ′ (0) = 0, H 1 u(l) + H 2 u ′ (l) = 0. (V.21)Ma M L = M L1 e D(L) = D(L 1 ). Quin<strong>di</strong> il problema <strong>di</strong> Sturm-Liouville(IV.1)-(IV.2) è equivalente all’equazione integrale∫ lu(x) = (λ − µ 0 ) G 1 (x, y)u(y) dy,0(V.22)dove G 1 (x, y) è la funzione <strong>di</strong> Green dell’operatore L 1 .1.3 Proprietà degli autovalori e delle autofunzioniAbbiamo dunque stabilito l’equivalenza tra il problema <strong>di</strong> Sturm-Liouvvilleomogeneo ed il problema agli autovalori per l’equazione integrale omogenea112
(IV.22) con nucleo integrale G 1 (x, y) reale, simmetrico e continuo. Gli autovaloriλ del problema (IV.1)-(IV.2) sono collegati ai numeri caratteristici delnucleo G 1 (x, y) con la relazione µ = λ − µ 0 , mentre le corrispondenti autofunzionicoincidono. Quin<strong>di</strong>, per il problema <strong>di</strong> Sturm-Liouville sono vali<strong>di</strong> tuttigli enunciati della teoria delle equazioni integrali con nucleo continuo, reale esimmetrico. In particolare 4 l’insieme degli autovalori {λ k } <strong>di</strong> questo problemanon è vuoto e non ha punti <strong>di</strong> accumulazione finiti; gli autovalori sono reali esono anche <strong>di</strong> moltiplicità finita; le autofunzioni possono essere scelte reali edortonormali ed appartengono a C 2 [0, l].Il problema <strong>di</strong> Sturm-Liouville ha alcune proprietà specifiche.1) Gli autovalori appartengono all’intervallo [q min ,∞) dove q min = min q(x).x∈[0,l]Infatti, per f ∈ M L si ha∫ l((Lf, f) = p|f ′ | 2 + q|f| 2) dx + h 1p(0)|f(0)| 2 + H 1p(l)|f(l)| 20h 2 H 2≥ q min ‖f‖ 2 2,dove gli ultimi termini del secondo membro si annullano per h 2 = 0 oper H 2 = 0, rispettivamente. Quin<strong>di</strong>, se λ è un autovalore <strong>di</strong> L concorrispondente autofunzione u, allora u ∈ M L e λ‖u‖ 2 2 = (Lu, u) ≥q min ‖u‖ 2 2, e dunque λ ≥ q min .2) L’insieme degli autovalori è infinito numerabile. Infatti, se quest’insiemefosse finito, {λ 1 , · · · , λ N }, il nucleo G 1 (x, y) sarebbe degenere:G 1 (x, y) =N∑k=1ϕ k (x)ϕ k (y), (V.23)λ k + 1dove ϕ 1 , · · · , ϕ k sono i corrispondenti autofunzioni ortonormalizzate. Siccomeϕ k ∈ C 2 [0, l], risulterebbe una contrad<strong>di</strong>zione con la (IV.13):∂G 1 (y + 0, y)∂x− ∂G 1(y + 0, y)∂x= 0, y ∈ (0, l).3) Ogni autovalore è semplice. Sia λ 0 un autovalore. Allora la corrispondenteautofunzione u sofd<strong>di</strong>sfa Lu = λ 0 u e le due con<strong>di</strong>zioni al contorno(IV.6) [per v 1 = v 2 = u]. Ciascuna <strong>di</strong> queste con<strong>di</strong>zioni definisce un sottospazio<strong>di</strong> L 2 (0, l) <strong>di</strong> <strong>di</strong>mensione 1. Quin<strong>di</strong> l’autospazio corrispondenteall’autovalore λ 0 è uni<strong>di</strong>mensionale.4 Sfruttiamo il fatto che il corrispondente operatore integrale K è compatto e autoaggiuntosu L 2 (Ω). Ciò si deve alla stima ∫ ∫Ω Ω |G 1(x, y)| 2 dx dy < +∞.113
Le con<strong>di</strong>zioni al contorno (IV.2) si <strong>di</strong>cono separate, poichè riguardano i valorie le derivate della u in estremi <strong>di</strong>versi dell’intervallo (0, l). Più generalmente,per u, v ∈ C 2 [0, l] risulta dopo due integrazioni per parti:(Lu, v) − (u, Lv) = [p (uv ′ − u ′ v)] l 0 .La parte a destra si annulla se u, v sod<strong>di</strong>sfano le con<strong>di</strong>zioni separate (IV.2).Purtroppo si annullano anche se consideriamo le con<strong>di</strong>zioni non separate√ √ √p(0) u(0) = ± p(l) u(l), p(0) u ′ (0) = ± √ p(l) u ′ (l),per la u e per la v, dove bisogna scegliere il segno + due volte oppure il segnomeno due volte. In tal caso si può introdurre il dominio M L ed estenderload un dominio su cui l’operatore <strong>di</strong>fferenziale L è autoaggiunto. Per esempio,consideriamo il problema <strong>di</strong> Sturm-Liouville con con<strong>di</strong>zioni perio<strong>di</strong>che−u ′′ = λu, u(0) = u(l), u ′ (0) = u ′ (l).In tal caso gli autovalori e le autofunzioni sono:⎧ ( ) 2 2nπ⎪⎨ λ n = , n = 0, 1, 2, · · ·l( ) ( )2nπx2nπx⎪⎩ u 0 = 1, u n (x) = c 1 cos + c 2 sin , n = 1, 2, 3, · · · .llTranne per l’autovalore λ 0 = 0, tutti gli autospazi hanno la <strong>di</strong>mensione 2.D’altra parte, per il problema <strong>di</strong> Sturm-Liouville con con<strong>di</strong>zioni antiperio<strong>di</strong>che−u ′′ = λu, u(0) = −u(l), u ′ (0) = −u ′ (l),gli autovalori e le autofunzioni sono:⎧ ( ) 2 (2n − 1)π⎪⎨ λ n =, n = 1, 2, 3, · · ·l ( ) ( )(2n − 1)πx(2n − 1)πx⎪⎩ u n (x) = c 1 cos+ c 2 sin, n = 1, 2, 3, · · · .llIn questo caso tutti gli autospazi hanno la <strong>di</strong>mensione 2.Siano (λ n ) ∞ n=1 gli autovalori della L e (ϕ n ) ∞ n=1 le corrispondenti autofunzioniortonormalizzate. Siccome il problema agli autovalori è equivalente a quello perun’equazione integrale con nucleo continuo reale e simmetrico, il sistema delleautofunzioni è completo in L 2 (0, l). In altre parole, ogni funzione f ∈ L 2 (0, l)può essere sviluppata in una serie∞∑f = (f, ϕ k )ϕ k ,(V.24)k=1114
dove‖f‖ 2 2 =∞∑|(f, ϕ k )| 2 ,k=1limN→+∞∫ l0N ∣ f(x) − ∑(f, ϕ k )ϕ k (x)∣k=12dx = 0.Esempio V.11 Consideriamo il problema <strong>di</strong> Sturm-Liouville con con<strong>di</strong>zioniperio<strong>di</strong>che−u ′′ = λu, u(0) = u(l), u ′ (0) = u ′ (l).Allora gli autovalori e le corrispondenti autofunzioni ortonormalizzate sono:⎧( ) 2 2nπ⎪⎨ λ 0 =0, λ c n =λ s n = ,l⎪⎩ ϕ 0 (x)= √ 1 ( ) 1/2 ( ) ( ) 1/2 ( )2 2nπx2 2nπx, ϕ c n(x)= cos , ϕ sl lln(x)= sin ,lldove n = 1, 2, 3, · · · . Per f ∈ L 2 (0, l) risulta la serie <strong>di</strong> Fourierdovea 0 = 2 πa n = 2 lf(x) = a 02 + ∞∑∫ l0∫ l0n=1(a n cosf(x) dx,( ) 2nπxf(x) cos dx, b n = 2 ll( ) ( 2nπx2nπx+ b n sinll∫ l0)),( ) 2nπxf(x) sin dx.l2 Problemi <strong>di</strong> Sturm-Liouville singolariFinora ci siamo limitati ai problemi <strong>di</strong> Sturm-Liouville detti regolari. Ciò vuol<strong>di</strong>re che l’equazione <strong>di</strong>fferenziale ha la formaLu ≡ −(pu ′ ) ′ + qu = λu, 0 < x < l, (V.25)dove p ∈ C 1 [0, l] è strettamente positiva (anche agli estremi dell’intervallo[0, l]) e q ∈ C[0, l] è una funzione reale. Nelle applicazioni appaiono, purtroppo,problemi <strong>di</strong> Sturm-Liouville in cui la funzione p è positiva all’internodell’intervallo (0, l) e si annulla ad uno (o ambedue) degli estremi. Esistonoanche applicazioni importanti in cui l’intervallo è illimitato. Tali problemi <strong>di</strong>Sturm-Liouville si <strong>di</strong>cono singolari.La teoria dei problemi <strong>di</strong> Sturm-Liouville singolari è stata principalmentesviluppata da Weyl (1908). L’esistenza <strong>di</strong> uno zero della p all’estremo x = 0115
implica l’impossibilità <strong>di</strong> convertire l’equazione <strong>di</strong>fferenziale in un’equazionedella forma y ′′ + . . . = 0 con con<strong>di</strong>zioni iniziali <strong>di</strong> tipo y(0) = y 0 e y ′ (0) =y 1 . Ciò compromette in modo serio la costruzione della funzione <strong>di</strong> Greene la conversione del problema <strong>di</strong> Sturm-Liouville in un’equazione integralecon nucleo hermitiano. Un’altra <strong>di</strong>fficoltà è la descrizione delle con<strong>di</strong>zioni alcontorno che conducono ad un operatore autoaggiunto e quin<strong>di</strong> ad una teoriaspettrale. La terza <strong>di</strong>fficoltà consiste nella possibilità dell’esistenza <strong>di</strong> spettrocontinuo. Ciò capita in particolare per l’equazione <strong>di</strong> Schrö<strong>di</strong>nger ra<strong>di</strong>ale conpotenziale che tende a zero se |x| → ∞, per cui R + è lo spettro continuodell’operatore <strong>di</strong> Sturm-Liouville. Tutto quanto vuol <strong>di</strong>re che non c’è alcunasperanza <strong>di</strong> una teoria generale. Invece bisogna trattare le applicazioni in modoad hoc.Esempio V.12 Sia ν ≥ 0. Consideriamo il problema al contornoL ν u ≡ −(xu ′ ) ′ + ν2u = λxu, 0 < x < 1, (V.26)xu(x) = O(x γ ), x → 0; αu(1) + βu ′ (1) = 0, (V.27)dove γ = min(ν, 1), α ≥ 0, β ≥ 0, α + β > 0. Sia M Lν l’insieme <strong>di</strong> tutte lefunzioni u ∈ C 2 ((0, 1]) ∩ L 2 ((0, 1); x dx) che sod<strong>di</strong>sfano alle con<strong>di</strong>zioni al contorno(IV.27) e la con<strong>di</strong>zione x −1/2 L ν u ∈ L 2 (0, 1). Quest’insieme è denso nellospazio <strong>di</strong> Hilbert L 2 ((0, 1); x dx) in cui verrà stu<strong>di</strong>ato il problema al contorno.Dimostriamo ora che l’operatore L ν è positivo. Infatti, nel prodotto scalare<strong>di</strong> L 2 (0, 1) si ha per u ∈ M Lν(L ν u, u) = −==∫ 10∫ 10∫ 10(xu ′ ) ′ u dx + ν 2 ∫ 10|u| 2x dxx|u ′ | 2 dx − [xu ′ u] 1 x=0 + ν 2 ∫ 1x|u ′ | 2 dx + ν 2 ∫ 10|u| 20|u| 2x dxx dx + α β |u(1)|2 ≥ 0.Di conseguenza, tutti gli autovalori dell’operatore L ν sono non negativi. Affinchèλ = 0 sia autovalore dell’operatore L ν , è necessario e sufficiente che ν = 0ed α = 0 [con<strong>di</strong>zione <strong>di</strong> Neumann all’estremo x = 1]; a quest’autovalore corrispondel’autofunzione costante. Gli autovalori sono anche semplici. Discutiamoora il caso λ > 0. In tal caso le uniche soluzioni della (IV.26) limitateper x → 0 + sono i multipli della funzione J ν (x). Una tale soluzione sod<strong>di</strong>sfala con<strong>di</strong>zione (IV.27) se e solo seαJ ν ( √ λ) + β √ λ J ′ ν( √ λ) = 0,116
cioè, se e solo se µ = √ λ è una ra<strong>di</strong>ce dell’equazione (II.43). Enumerandoquesti zeri da 0 < µ (ν)1 < µ (ν)2 < · · · , otteniamo gli autovalori (soltanto quelli<strong>di</strong>versi da 0) λ (ν)k= [µ (ν)k]2 e le corrispondenti autofunzioni J ν (µ (ν)kx) (k =1, 2, · · · ). Per ν = α = 0 si aggiunga l’autovalore λ (0)0 = 0 con la corrispondenteautofunzione costante.Per ν = 0 le funzioni v 1 (x) = 1 e v 2 (x) = β − α log(x) sod<strong>di</strong>sfano all’equazione(IV.26) e, rispettativamente, alla prima e alla seconda con<strong>di</strong>zione (IV.27).Quin<strong>di</strong> le soluzioni dell’equazione <strong>di</strong>fferenziale L 0 u ≡ −(xu ′ ) ′ = xf(x) hannola formau(x) = c 1 (x)v 1 (x) + c 2 (x)v 2 (x),(V.28)dove ( ) ( )v1 (x) v 2 (x) c′1 (x)v 1(x)′ v 2(x)′ c ′ 2(x)0( 0= −f(x) . (V.29)1)Sia α > 0 (cioè, esclu<strong>di</strong>amo la con<strong>di</strong>zione <strong>di</strong> Neumann in x = 1). Dunquec ′ 1(x) = [log(x) − β ]xf(x) e α c′ 2(x) = xf(x)/α. Quin<strong>di</strong>∫ x[c 1 (x) = c 1 + log(y) − β ]yf(y) dy, c 2 (x) = c 2 − 1 ∫ 1yf(y) dy.ααSiccomeu(x) =+si ha c 2 = 1 α(−αc 2 +∫ x0∫ 10u(x) = c 1 +La seconda con<strong>di</strong>zione∫ 10)yf(y) dy log(x) + c 1 + βc 2[log(y) − β α ]yf(y) dy − β αyf(y) dy, e dunque∫ x[log(y) − β α00 = u(1) + β α u′ (1) = c 1 +ci dà la costante c 1 . Infine∫ 1x]yf(y) dy −∫ 10yf(y) dy − (log x)x∫ x0yf(y) dy,[log(x) − β ] ∫ xyf(y) dy.α 0[log(y) − β ]yf(y) dyαu(x) =dove la funzione <strong>di</strong> Green∫ 10G(x, y)f(y) ydy,(V.30)G(x, y) = β − log max(x, y) > 0.α117
Quin<strong>di</strong> il problema (IV.26)-(IV.27) è equivalente all’equazione integraleu(x) − λ∫ 10G(x, y)u(y) ydy =∫ 1da risolvere nello spazio <strong>di</strong> Hilbert L 2 ((0, 1); x dx).esatta della funzione <strong>di</strong> Green si trova in [2].0G(x, y)f(y) ydy,Esempio V.13 Consideriamo ora il problema al contornoPer ν > 0 l’espressioneLu ≡ −u ′′ + µ 2 u = λu, x ∈ R, (V.31)su un intervallo illimitato, dove µ > 0. Sia M L l’insieme <strong>di</strong> tutte le funzioniu ∈ L 2 (R) tali che la sua derivata seconda (<strong>di</strong>stribuzionale) u ′′ ∈ L 2 (R). Allorav 1 (x) = e µx e v 2 (x) = e −µx sod<strong>di</strong>sfano all’equazione v j ′′ + µ 2 v j = 0 per j = 1, 2.Le soluzioni dell’equazione Lu ≡ −u ′′ + µ 2 u = f hanno tutte la formau(x) = c 1 (x)v 1 (x) + c 2 (x)v 2 (x),dove ( ) ( )v1 (x) v 2 (x) c′1 (x)v 1(x)′ v 2(x)′ c ′ 2(x)=( ) 0.−f(x)Quin<strong>di</strong> c ′ 1(x) = −e −µx f(x)/2µ e c ′ 2(x) = e µx f(x)/2µ. Di conseguenza,Dunquec 1 (x) = c 1 + 12µ∫ ∞u(x) = c 1 e µx + c 2 e −µx + 12µxe −µy f(y) dy, c 2 (x) = c 2 + 12µ∫ ∞Affinchè u ∈ L 2 (R), ci vuole c 1 = c 2 = 0. Quin<strong>di</strong>xu(x) = 12µ∫ x−∞e µy f(y) dy.e µ(x−y) f(y) dy + 1 ∫ xe −µ(x−y) f(y) dy.2µ −∞(V.32)∫ ∞−∞e −µ|x−y| f(y) dy.(V.33)Si osservi che G(x, y) = e −µ|x−y| /2µ prende il posto della funzione <strong>di</strong> Green.Esempio V.14 Consideriamo ora il problema al contorno⎧Lu ≡ −u ′′ + µ 2 u = λu, x ∈ R + ,⎪⎨u(0) = 0,Dirichlet,u⎪⎩′ (0) = 0,Neumann,(cos α)u(0) − (sin α)u ′ (0) = 0, Con<strong>di</strong>zione mista,(V.34)118
su un intervallo illimitato, dove µ > 0 e α ∈ [0, π]. Sia M 2 L l’insieme <strong>di</strong>tutte le funzioni u ∈ L 2 (R) tali che la sua derivata seconda 5 u ′′ ∈ L 2 (R ∗ )e (cos α)u(0) = (sin α)u ′ (0). Seguendo il metodo dell’esempio precedentetroviamo al posto della (IV.32)u(x) = c 1 e µx +c 2 e −µx + 12µ∫ ∞xe µ(x−y) f(y) dy+ 12µAffinchè u ∈ L 2 (R + ), ci vuole c 1 = 0. Quin<strong>di</strong>u(x) = c 2 e −µx + 12µ∫ ∞0∫ x0e −µ|x−y| f(y) dy.e −µ(x−y) f(y) dy. (V.35)Ora sostituiamo la con<strong>di</strong>zione al contorno in x = 0. Il risultato finale è(V.36)u(x)⎧1⎪⎨2µ1=2µ1 ⎪⎩2µ∫ ∞∫0∞∫0∞0e −µ|x−y| f(y) dy − 12µe −µ|x−y| f(y) dy + 12µ∫ ∞∫0∞e −µ|x−y| f(y) dy + F (µ, α)0e −µ(x+y) f(y) dy,e −µ(x+y) f(y) dy,∫ ∞0e −µ(x+y) f(y) dy,Dirichlet,Neumann,mista,(V.37)doveF (µ, α) =Quin<strong>di</strong> la combinazione lineare convessaµ sin α − cos α2µ[µ sin α + cos α] .G(x, y) = e−µ|x−y| + 2µF (µ, α)e −µ(x+y)2µµ sin α=µ sin α + cos α G cos αNeumann(x, y) +µ sin α + cos α G Dirichlet(x, y)delle funzioni <strong>di</strong> Green nei casi delle con<strong>di</strong>zioni <strong>di</strong> Dirichlet e Neumann prendeil posto della funzione <strong>di</strong> Green.5 Si intende la derivata seconda <strong>di</strong>stribuzionale.119
120
Capitolo VIFUNZIONI <strong>DI</strong> GREEN1 Classificazione delle equazioni alle derivateparzialiConsideriamo un’equazione <strong>di</strong>fferenziale quasi-lineare (lineare in tutte le suederivate <strong>di</strong> or<strong>di</strong>ne maggiore) del secondo or<strong>di</strong>nen∑i,j=1∂ 2 ua ij (x) + Φ(x, u, ∇u) = 0∂x i ∂x j(VI.1)a coefficienti continui a ij (x) definiti su un aperto G ⊂ R n . L’equazione (V.1)sod<strong>di</strong>sfa la con<strong>di</strong>zione <strong>di</strong> simmetriaa ij (x) = a ji (x) reale, x ∈ G. (VI.2)Esempi importanti dell’equazione (V.1) sono l’equazione <strong>di</strong> Poisson n-<strong>di</strong>mensionale1 ∆u = −f, (VI.3)dove a ij (x) = δ ij (la delta <strong>di</strong> Kronecker), l’equazione delle onde n-<strong>di</strong>mensionale∂ 2 u∂t 2 − c2 ∆u = f,(VI.4)dove a 00 (x) = 1 (essendo t la coor<strong>di</strong>nata zero-esima), a ii (x) = −c 2 (i =1, · · · , n), e a ij (x) = 0 per i ≠ j, e l’equazione del calore n-<strong>di</strong>mensionale∂u∂t = a2 ∆u + f,(VI.5)1 ∆ è l’operatore <strong>di</strong> Laplace: ∆ = ∑ nj=1 ∂2∂x 2 j121= ∇ · ∇ = <strong>di</strong>v grad.
dove a 00 (x) = 0 (essendo t la coor<strong>di</strong>nata zero-esima), a ii (x) = a 2 (i = 1, · · · , n),e a ij (x) = 0 per i ≠ j.All’equazione (V.1) si associa la matrice n × nA(x) = (a ij (x)) n i,j=1,(VI.6)che <strong>di</strong>pende soltanto dai termini con le derivate parziale del secondo or<strong>di</strong>ne.Grazie alla (V.2), la matrice A(x) è reale e simmetrica. Quin<strong>di</strong> A(x) ha nautovalori reali λ 1 (x), · · · , λ n (x). Inoltre esiste una matrice ortogonale O(x)(cioè, O(x) T = O(x) −1 e la O(x) è reale) tale cheO(x) −1 A(x)O(x) = <strong>di</strong>ag (λ 1 (x), · · · , λ n (x)),(VI.7)dove la parte a destra è una matrice <strong>di</strong>agonale. La colonna j-esima della O(x)è un autovettore (<strong>di</strong> norma euclidea 1) della A(x) corrispondente all’autovaloreλ j (x) (j = 1, · · · , n). Le colonne della O(x) costituiscono una base ortonormaledello spazio euclideo R n .Introduciamo la seguente classificazione delle equazioni (V.1) che sod<strong>di</strong>sfanola (V.2). Tale equazione si <strong>di</strong>cea. ellittica se tutti gli autovalori λ j (x) sono <strong>di</strong>versi da zero e hanno lo stessosegno.b. iperbolica se tutti gli autovalori λ j (x) sono <strong>di</strong>versi da zero, ma non tuttihanno lo stesso segno. La (V.1) si <strong>di</strong>ce <strong>di</strong> tipo iperbolico normale se èiperbolica e tutti gli autovalori tranne uno hanno lo stesso segno.c. parabolica se almeno uno degli autovalori (ma non tutti) si annullano.La (V.1) si <strong>di</strong>ce <strong>di</strong> tipo parabolico normale se è parabolica e tutti gliautovalori non nulli hanno lo stesso segno.Torniamo agli esempi (V.3), (V.4) e (V.5):(V.3): Si ha A(x) = <strong>di</strong>ag (1, · · · , 1) <strong>di</strong> or<strong>di</strong>ne n. Tutti gli autovalori sono ugualiad 1 e quin<strong>di</strong> l’equazione <strong>di</strong> Poisson è ellittica.(V.4): Si ha A(x) = <strong>di</strong>ag (1, −c 2 , · · · , −c 2 ) <strong>di</strong> or<strong>di</strong>ne n + 1. Uno degli autovaloriè uguale ad 1 e gli altri sono uguali a −c 2 . Quin<strong>di</strong> l’equazione delle ondeè <strong>di</strong> tipo iperbolico normale.(V.5): Si ha A(x) = <strong>di</strong>ag (0, −a 2 , · · · , −a 2 ) <strong>di</strong> or<strong>di</strong>ne n+1. Uno degli autovalorisi annulla e gli altri sono uguali a −a 2 . Quin<strong>di</strong> l’equazione del calore è<strong>di</strong> tipo parabolico normale.122
Osserviamo che in principio la classificazione della (V.1) <strong>di</strong>pende dalla sceltadel punto x ∈ G. Per la maggior parte delle equazioni della fisica matematicail segno degli autovalori (spesso gli autovalori stessi) e dunque la classificazionenon <strong>di</strong>pende da x ∈ G (tranne in qualche punto eccezionale, spesso <strong>di</strong>frontiera). Un’eccezione notevole è l’equazione <strong>di</strong> Tricomiy ∂2 u∂x 2 + ∂2 u∂y 2 = 0,(VI.8)dove (x, y) ∈ G = R 2 . In tal caso A(x, y) = <strong>di</strong>ag (y, 1), λ 1 (x, y) = y eλ 2 (x, y) = 1. Quin<strong>di</strong> la (V.8) è ellittica se y > 0, parabolica se y = 0 eiperbolica se y < 0.2 Problemi agli autovalori multi<strong>di</strong>mensionali2.1 Impostazione del problema agli autovaloriConsideriamo il seguente problema al contorno omogeneo lineare per un’equazione<strong>di</strong> tipo ellittico:− <strong>di</strong>v (p grad u) + qu = λu, x ∈ Ω, (VI.9)(αu + β ∂u )∣ ∣∣∣∂Ω= 0.∂n(VI.10)Supponiamo che⎧⎪⎨ p ∈ C 1 (Ω), q ∈ C(Ω); p(x) > 0, q(x) ∈ R, x ∈ Ω,α ∈ C(∂Ω), β ∈ C(∂Ω),⎪⎩α(x) ≥ 0, β(x) ≥ 0, α(x) + β(x) > 0, x ∈ ∂Ω.(VI.11)Sia ∂Ω 0 = {x ∈ ∂Ω : min(α(x), β(x)) > 0}. In alcuni casi supponiamo inoltreche q(x) ≥ 0 per x ∈ Ω. Notiamo i seguenti casi particolari:⎧⎨α(x) ≡ 1, β(x) ≡ 0, quin<strong>di</strong> u = 0, x ∈ ∂Ω, [con<strong>di</strong>zione <strong>di</strong> Dirichlet]⎩α(x) ≡ 0, β(x) ≡ 1,quin<strong>di</strong> ∂u∂n= 0, x ∈ ∂Ω,[con<strong>di</strong>zione <strong>di</strong> Neumann].Il problema (V.9)-(V.10) consiste nel trovare una funzione u(x) <strong>di</strong> classeC 2 (Ω) ∩ C 1 (Ω) che sod<strong>di</strong>sfi l’equazione (V.9) in Ω e la con<strong>di</strong>zione (V.10) sullafrontiera ∂Ω. Evidentemente, il problema (V.9)-(V.10) ha sempre la soluzionenulla, e questa soluzione non ha alcun interesse. Perciò il problema (V.9)-(V.10) deve essere considerato come un problema agli autovalori per l’operatoreL = −<strong>di</strong>v (grad ) + q.123
Tutte le funzioni f <strong>di</strong> classe C 2 (Ω) ∩ C 1 (Ω) che sod<strong>di</strong>sfano la con<strong>di</strong>zione alcontorno (V.10) e la con<strong>di</strong>zione Lf ∈ L 2 (Ω) costituiscono il dominio M Ldell’operatore L. Siccome lo spazio vettoriale D(Ω) <strong>di</strong> tutte le funzioni <strong>di</strong>classe C ∞ (Ω) <strong>di</strong> supporto compatto (cioè, che si annullano fuori <strong>di</strong> un compattocontenuto in Ω) è denso in L 2 (Ω) ed è contenuto in M L , M L è denso in L 2 (Ω).In generale, il dominio M L <strong>di</strong> L non è abbastanza grande per trovare tuttele autofunzioni. Per questa ragione bisogna estendere l’operatore L ad undominio abbastanza grande per contenere le autofunzioni.2.2 Formule <strong>di</strong> GreenSe u ∈ C 2 (Ω) ∩ C 1 (Ω) e v ∈ C 1 (Ω), è valida la prima formula <strong>di</strong> Green:∫Ω∫v Lu dx =Ωpn∑i=1∫∂v ∂udx − pv ∂u∂x i ∂x i ∂Ω ∂n∫ΩdS + quv dx.(VI.12)Per <strong>di</strong>mostrare la formula (V.12) pren<strong>di</strong>amo una regione arbitraria Ω ′ confrontiera ∂Ω ′ una superficie regolare a tratti tale che Ω ′ ⊂ Ω. Visto che u ∈C 2 (Ω), si ha anche u ∈ C 2 (Ω ′ ) e, <strong>di</strong> conseguenza,∫∫v [−<strong>di</strong>v (p grad u) + qu] dxv Lu dx =Ω ′ Ω∫′∫= − <strong>di</strong>v (pv grad u) dx +Ω ′Ω ′pn∑i=1∫∂v ∂udx +∂x i ∂x i Ω ′Utilizzando il teorema della <strong>di</strong>vergenza (<strong>di</strong> Gauss) si ottiene∫∫v Lu dx =Ω ′Ω ′pn∑i=1∫∂v ∂udx −∂x i ∂x i ∂Ω ′pv ∂u ∫∂n ′ dS′ +Ω ′quv dx,quv dx.dove ∂Ω ′ è la frontiera <strong>di</strong> Ω ′ . Facendo tendere Ω ′ a Ω nell’uguaglianza ottenutaed utilizzando il fatto che u, v ∈ C 1 (Ω), conclu<strong>di</strong>amo che il limite del secondomembro esiste. Quin<strong>di</strong> esiste anche il limite del primo membro ed è validal’uguaglianza (V.12). In tal caso l’integrale del primo membro della (V.12)deve essere considerato improprio. I limiti non <strong>di</strong>pendono della maniera incui Ω ′ tende a Ω, poichè gli integrali nelle parte a destra della (V.12) sonoassolutamente convergenti.Se u, v ∈ C 2 (Ω) ∩ C 1 (Ω), è valida la seconda formula <strong>di</strong> Green:∫∫ ((v Lu − u Lv) dx = p u ∂v∂n − v ∂u )dS. (VI.13)∂nΩ∂Ω124
Per <strong>di</strong>mostrare la formula (V.13), scambiamo u e v nella (V.12):∫Ω∫u Lv dx =Ωpn∑i=1∫∂u ∂vdx − pu ∂v∂x i ∂x i ∂Ω ∂n∫ΩdS + qvu dx,(VI.14)e sottraiamo l’uguaglianza ottenuta della (V.14). Come risultato, si ottiene laseconda formula <strong>di</strong> Green (V.13).In particolare per p(x) ≡ 1 e q(x) ≡ 0, le formule (V.12) e (V.13) <strong>di</strong> Greensi trasformano nelle seguenti uguaglianze:∫Ω∫v ∆u dx = − pΩ∫Ωn∑i=1∫(v ∆u − u ∆v) dx =2.3 Proprietà dell’operatore L1. L’operatore L è hermitiano:∫∂v ∂udx + v ∂u∂x i ∂x i ∂Ω ∂n dS,∂Ω(v ∂u∂n − u ∂v )dS.∂n(VI.15)(VI.16)(Lf, g) = (f, Lg), f, g ∈ M L . (VI.17)Infatti, visto che f, g ∈ M L , si ha Lf ∈ L 2 (Ω) e Lg = Lg ∈ L 2 (Ω). In tal casola seconda formula <strong>di</strong> Green (V.13), per u = f e v = g, assume la forma∫∫ ((Lf, g) − (f, Lg) = (g Lf − f Lg) dx = p f ∂g∂n − g ∂f )dS. (VI.18)∂nΩPer <strong>di</strong>mostrare che si annulla l’ultima parte della (V.18), osserviamo che lefunzioni f e g sod<strong>di</strong>sfano le con<strong>di</strong>zioni al contorno (V.10):(αf + β ∂f )∣ (∣∣∣∂Ω= 0, αg + β ∂g )∣ ∣∣∣∂Ω= 0. (VI.19)∂n∂nPer l’ipotesi (V.11), α(x) + β(x) > 0 per x ∈ ∂Ω. Perciò per ogni x ∈ ∂Ω ilsistema omogeneo <strong>di</strong> equazioni algebriche lineari (V.19) ha una soluzione nonnulla (α(x), β(x)), si annulla il suo determinante, cioè⎡⎢detf⎣g⎤∂f∂n⎥∂g ⎦ =∂nDi conseguenza è hermitiano l’operatore L.∂Ω(f ∂g∂n − g ∂f )∣ ∣∣∣∂Ω= 0.∂n125
2. Sia f ∈ M L . Ponendo u = f e v = f nella prima formula <strong>di</strong> Green(V.12) e tenendo conto del fatto che f ∈ L 2 (Ω), si ottiene∫∫(Lf, f) = p|grad f| 2 dx − pf ∂fΩ∂Ω ∂n∫ΩdS + q|f| 2 dx. (VI.20)Dalla con<strong>di</strong>zione al contorno (V.10) segue che⎧⎨∂f∂n = −α β f, β(x) > 0, x ∈ ∂Ω;⎩f = 0, β(x) = 0, x ∈ ∂Ω.Sostituendo queste relazioni nell’uguaglianza (V.20), si ottiene l’espressioneper la forma quadratica∫((Lf, f) = p|grad f| 2 + q|f| 2) ∫dx + p αΩ∂Ω 0β |f|2 dS, f ∈ M L , (VI.21)dove ∂Ω 0 è la parte <strong>di</strong> ∂Ω in cui min(α(x), β(x)) > 0. La forma quadratica(Lf, f), f ∈ M L , è detta integrale d’energia.3. Ritorniamo adesso all’operatore <strong>di</strong> Sturm-Liouville L con dominio M L .Allora L è hermitiano su L 2 (Ω) con dominio denso in L 2 (Ω) che ha la seguenteproprietà: (Lf, f) ≥ q min ‖f‖ 2 2 per f ∈ D(L). In tal caso esiste un’unicaestensione autoaggiunta L dell’operatore L tale che (Lf, f) ≥ q min ‖f‖ 2 2 perf ∈ D(L). Le autofunzioni del problema al contorno (V.9)-(V.10) si cercanonel dominio D(L).Proposizione VI.1 Abbiamo le seguenti proprietà:a) Tutti gli autovalori sono reali e sono contenuti nell’intervallo [q min , ∞),dove q min = min{q(x) : x ∈ Ω}.b) Le autofunzioni corrispondenti ad autovalori <strong>di</strong>versi sono ortogonali traloro.c) Le autofunzioni possono essere scelte reali.d) Affinchè λ = q min è autovalore <strong>di</strong> L, è necessario e sufficiente che q siacostante ed α(x) ≡ 0. In tal caso l’autofunzione è costante.Dimostrazione. Per <strong>di</strong>mostrare la parte (a), sia f ∈ D(L) tale che Lf =λf e f ≢ 0. Allora (λ − λ)‖f‖ 2 = (Lf, f) − (f, Lf) = 0, e quin<strong>di</strong> λ = λ èreale. Inoltre, se q(x) ≥ q min per ogni x ∈ ∂Ω e λ è autovalore corrispondenteall’autofunzione f (cioè, f ≢ 0 e Lf = λf), alloraλ‖f‖ 2 2 = (Lf, f) ≥ q min ‖f‖ 2 2.126
Per <strong>di</strong>mostrare la parte (b), consideriamo f, g ∈ D(L) non banali taliche Lf = λf e Lg = µg; in tal caso λ, µ ∈ R. Si controlla facilmente che(λ − µ)(f, g) = (Lf, g) − (f, Lg) = 0 e quin<strong>di</strong> λ = µ oppure (f, g) = 0.Per <strong>di</strong>mostrare la parte (c), se f è un’autofunzione, il fatto che il corrispondenteautovalore è reale implica che anche f è una autofunzione. Siccomele parti reale ed immaginaria della f non si possono ambedue annullare quasiovunque, una <strong>di</strong> loro è un’autofunzione reale.Infine, 2 per <strong>di</strong>mostrare la parte (d), sia λ = q min autovalore con correspondenteautofunzione f. Allora dalla (V.21) segue che grad f ≡ 0 (cioè che f ècostante) e qf ≡ q min f.✷3 Equazioni ellitticheIn Cap. IV abbiamo espresso la soluzione unica del problema <strong>di</strong> Sturm-Liouville uni<strong>di</strong>mensionaleLu ≡ −(pu ′ ) ′ + qu = f, 0 < x < l, (VI.22a)h 1 u(0) − h 2 u ′ (0) = 0, H 1 u(l) + H 2 u ′ (l) = 0, (VI.22b)dove λ = 0 non è autovalore, nella formau(x) = (Gf)(x) =∫ L0G(x, y)u(y) dy,(VI.23)dove la funzione <strong>di</strong> Green G(x, y) è reale, simmetrica e continua e quin<strong>di</strong>l’operatore integrale G è autoaggiunto sullo spazio <strong>di</strong> Hilbert L 2 (0, L). Inquesto capitolo esten<strong>di</strong>amo tali espressioni al caso multi<strong>di</strong>mensionale per dueoperatori <strong>di</strong>fferenziali: quello <strong>di</strong> Laplace (L = −∆) e quello <strong>di</strong> Helmholtz(L = −∆ + k 2 ). Nel caso uni<strong>di</strong>mensionale in<strong>di</strong>chiamo le funzioni <strong>di</strong> Greennel caso <strong>di</strong> con<strong>di</strong>zioni al contorno non separate (per esempio, le con<strong>di</strong>zioniperio<strong>di</strong>che o antiperio<strong>di</strong>che).Se λ = 0 è autovalore, la soluzione del problema (V.22) esiste se e solo sef è ortogonale a tutte le autofunzioni corrispondenti all’autovalore λ = 0. Sequesto autovalore è semplice e l’autofunzione è ϕ 0 , allora esiste, per ogni f ∈L 2 (0, L) che sod<strong>di</strong>sfa (f, ϕ 0 ) = 0, un’unica soluzione u che sod<strong>di</strong>sfa (u, ϕ 0 ) = 0.Tale soluzione verrà scritta nella forma (V.23).2 Ci semplifichiamo la vita supponendo che f ∈ M L .127
3.1 Equazioni <strong>di</strong> Laplace e <strong>di</strong> PoissonConsideriamo il problema al contorno (<strong>di</strong> Dirichlet)(Lu)(x) def= −∆u + q(x)u = f(x), x ∈ Ω, (VI.24a)u(x) = g(x), x ∈ ∂Ω, (VI.24b)dove Ω è un sottoinsieme aperto, limitato e connesso in R n con frontiera ∂Ωun’ipersuperficie regolare a tratti. Cerchiamo prima la cosiddetta funzione <strong>di</strong>Green G D (x, y) tale che{L y [G D (x, y)] = −∆ y G D (x, y) + q(y)G D (x, y) = δ(x − y),G D (x, y) = 0 per x ∈ ∂Ω.(VI.25)Allora∫u(x) =Ω∫G D (x, y)f(y) dy −∂Ω∂G D∂n y(x, y)g(y) dσ(y).(VI.26)Infatti, per v(y) = G D (x, y) we have∫Ω∫∫f(y)v(y) dy = − v∆ y u dy + q(y)u(y)v(y) dyΩΩ∫∫= − (v∆ y u − u∆ y v) dy + u(−∆ y v + q(y)v(y)) dyΩΩ∫ ((V.16)= − v ∂u − u ∂v ) ∫dσ y + u(y)δ(x − y) dy∂Ω ∂n y ∂n y Ω∫= g(y) ∂G D(x, y) dσ y + u(x),∂n y∂Ωimplicando la (V.26).Invece, se consideriamo il problema al contorno (<strong>di</strong> Neumann)(Lu)(x) def= −∆u = f(x), x ∈ Ω, (VI.27a)∂u= g(x),∂n xx ∈ ∂Ω, (VI.27b)allora∫esiste una soluzione u del problema <strong>di</strong> Neumann (V.27) se e solo sef(x) dx = 0, cioè, se e solo se (f, ϕ Ω 0) = 0 per ϕ 0 (x) ≡ 1 autofunzione <strong>di</strong> L(con con<strong>di</strong>zione <strong>di</strong> Neumann) corrispondente all’autovalore λ = 0. L’unicitàviene garantita richiedendo che ∫ u(x) dx = 0. Cerchiamo ora la funzione <strong>di</strong>Ω128
Green G N (x, y) tale cheL y [G N (x, y)] = −∆ y G N (x, y) = δ(x − y) − 1m(Ω) ,∂G N(x, y) = 0 per y ∈ ∂Ω,∂n∫ yG N (x, y) dx = 0,Ωdove m(Ω) è la misura <strong>di</strong> Ω. Allora∫∫u(x) = G N (x, y)f(y) dy −Ω∂Ω∂G N∂n y(x, y)g(y) dσ(y).(VI.28a)(VI.28b)(VI.28c)Infatti, per v(y) = G N (x, y) we have∫∫f(y)v(y) dy = − v∆ y u dyΩΩ∫∫= − (v∆ y u − u∆ y v) dy + u(−∆ y v) dyΩΩ∫ ((V.16)= − v ∂u − u ∂v ) ∫dσ y + u(y)δ(x − y) dy∂Ω ∂n y ∂n y Ω− 1 ∫∫u(y) dy = g(y) ∂G N(x, y) dσ y + u(x),m(Ω)∂n ypiochè ∫ u(y) dy = 0, implicando la (V.29).Ω3.1.aΩ∂ΩEquazione <strong>di</strong> Poisson negli intervalli(VI.29)Siano Ω = (0, L) e Lu = −u ′′ con le con<strong>di</strong>zioni antiperio<strong>di</strong>che u(0) = −u(L)e u ′ (0) = −u ′ (L). Allora λ = 0 non è autovalore, v 1 (x) = (L/2) − x sod<strong>di</strong>sfaLv 1 = 0 con v 1 (0) = −v 1 (L), e v 2 (x) = 1 sod<strong>di</strong>sfa Lv 2 = 0 con v 2(0) ′ = −v 2(L),′mentre il Wronskiano v 1 v 2 ′ −v 1v ′ 2 = 1. Ponendo u(x) = c 1 (x)v 1 (x)+c 2 (x)v 2 (x)arriviamo al sistema lineare( ) ( ) ( )v1 (x) v 2 (x) c′1 (x) 0v 1(x)′ v 2(x)′ c ′ =2(x) −f(x)con∫soluzione c ′ 1(x) = f(x) e c ′ 2(x) = (x − 1L)f(x). Quin<strong>di</strong> c 2 1(x) = c 1 +xf(y) dy e c 0 2(x) = c 2 + ∫ x(y − L )f(y) dy, e dunque0 2u(x) = c 1 ( 1 2 L − x) + c 2 + ( 1 ∫ x2 L − x) f(y) dy +u ′ (x) = −c 1 −∫ x0f(y) dy.1290∫ x0(y − 1 L)f(y) dy,2
Sostituendo le con<strong>di</strong>zioni al contorno otteniamoDi conseguenza,dovec 1 = − 1 2∫ L0f(y) dy, c 2 = 1 2u(x) =∫ LG antiper. (x, y) = 1 20∫ LG antiper. (x, y)f(y) dy,0( 12 L − |x − y| ).(L − y)f(y) dy.(VI.30)Al contrario, sotto le con<strong>di</strong>zioni <strong>di</strong> Neumann u ′ (0) = −u ′ (L) = 0 risultac 1 = − 1 2∫ L0f(y) dy = 0,ristringendo così l’insieme delle f per cui esiste una soluzione. Dunqueu(x) = c 2 +( 1 ∫ x2 L−x) f(y) dy +Imponendo la con<strong>di</strong>zione ∫ L00c 2 = 12L∫ x0(y − 1 2 L)f(y) dy = c 2 −u(y) dy = 0, otteniamo∫ LQuin<strong>di</strong> u(x) ha la forma (V.30), dove0(L − y) 2 f(y) dy.G N (x, y) = 12L (L − max(x, y))2 .∫ x0(x−y)f(y) dy.Sotto le con<strong>di</strong>zioni perio<strong>di</strong>che u(0) = u(L) e u ′ (0) = u ′ (L) partiamo dalleespressioniu(x) = c 1 x + c 2 −u ′ (x) = c 1 −∫ x0∫ x ∫ z00f(y) dy.f(y) dydz = c 1 x + c 2 −∫ x0(x − y)f(y) dy,Quin<strong>di</strong> da u ′ (0) = u ′ (L) segue la con<strong>di</strong>zione necessaria ∫ Lf(y) dy = 0 per0l’esistenza <strong>di</strong> una soluzione. Da u(0) = u(L) seguonoc 1 = 1 L∫ L0u(x) = c 2 + x L(L − y)f(y) dy,∫ L0(L − y)f(y) dy −130∫ x0(x − y)f(y) dy.
Per trovare la soluzione unica supponiamo che ∫ L0c 2 = − 12L= − 12L∫ L0∫ L0y(L − y)f(y) dyQuin<strong>di</strong> u(x) ha la forma (V.30), dove3.1.bu(y) dy = 0. Alloray(L − y)f(y) dy − 1 ∫ L2L x(L − x) f(y) dy.G per. (x, y) = − 1 |x − y|(L − |x − y|).2LFunzione <strong>di</strong> Green in R nIntroducendo r = ‖(x 1 , . . . , x n )‖ 2 = √ x 2 1 + . . . + x 2 n e ω = (x 1 , . . . , x n )/r, ilLaplaciano ha la seguente forma:∆ψ = 1 ( )∂ n−1 ∂ψr − 1 r n−1 ∂r ∂r r (L Bψ)(ω), (VI.31)2dove L B è il cosiddetto operatore <strong>di</strong> Beltrami n-<strong>di</strong>mensionale. Applicando ilLaplaciano al polinomio omogeneo armonico r l y(ω) <strong>di</strong> grado l (essendo y(ω)una funzione sferica) otteniamo(L B y)(ω) = l(l + n − 2)y(ω), ω ∈ S n−1 . (VI.32)Quin<strong>di</strong> le funzioni sferiche sono le autofunzioni dell’operatore <strong>di</strong> Beltrami.Consideriamo ora l’equazione <strong>di</strong> Poisson∆G(x) = −δ(r)Ω n r , n−10(VI.33)dove x ∈ R n , r = |x| e Ω n = m(S n−1 ). 3 Allora G(x) <strong>di</strong>pende soltanto dar = |x| e( )d n−1 dGr = − δ(r) , r > 0. (VI.34)dr dr Ω n3 Sia V n la misura della palla <strong>di</strong> raggio 1 in R n . Allora V n r n = ∫ r0 dˆr ˆrn−1 Ω n = Ω n r n /n.Inoltre,V n =∫ 1−1∫ 1∫ √ 1−x ∫ √ 211−x 2 1 −x2 2dx 1 dx 2− √ 1−x 2 1− √ 1−x 2 1 −x2 2∫ √ 1−x 2 1 −...−x2 n−1dx 3 . . .− √ 1−x 2 1 −...−x2 n−1√( 1= dx 1 V n−1 ( 1 − x 2 1 )n−1 = V n−1 B−12 , n + 1 )2( 1= V n−2 B2 , n + 1 ) ( 1B2 2 , n )Γ( 1 n+12)Γ(2= V ) Γ( 1n−22 Γ( n 2 )γ( n 2 )2 + 1) Γ( n+12 ) = 2π n V n−2.Quin<strong>di</strong> Ω 2p = 2π p /(p − 1)! e Ω 2p+1 = π p 2 2p+1 (p!)/(2p)!131dx n
Risolvendo la (V.34) sotto la con<strong>di</strong>zione che G(r) → 0 per r → +∞ (solofattibile se n ≥ 3) e applicando il Teorema della Divergenza alla (V.33), sitrova 4 ⎧−(2π)⎪⎨−1 log(r), n = 2,Γ(n/2) 1G(r) = , n ≥ 3,(VI.35)2(n − 2)π⎪⎩n/2 rn−2 1/(4πr), n = 3.Quin<strong>di</strong> la soluzione dell’equazione ∆ y G(x, y) = δ(x − y) nell’intero spazio èG(‖x − y‖). In altre parole, la soluzione unica dell’equazione <strong>di</strong> Poisson∆u = −ρ(x), x ∈ R n ,ha la seguente forma (per n ≥ 3)∫u(x) = dy G(x, y)ρ(y) =R nPer n = 3 otteniamo l’espressioneu(x) = 14π∫Γ(n/2)2(n − 2)π n/2∫R 3 dyR n dyρ(y)‖x − y‖nota dall’elettro<strong>di</strong>namica.Consideriamo ora l’equazione <strong>di</strong> Poisson n-<strong>di</strong>mensionaleρ(y)‖x − y‖ n−2 .(VI.36)−∆v = f(x), x ∈ Ω,dove Ω è un sottoinsieme aperto, limitato e connesso <strong>di</strong> R n e la sua frontiera∂Ω è un’ipersuperficie regolare a tratti. In generale la funzione∫v(x) = G(x, y)f(y) dy, x ∈ Ω,non sod<strong>di</strong>sfa alle con<strong>di</strong>zioni al contorno. Siano∫v(x b ) = G(x b , y)f(y) dy,Ω∫∂v∂n (x ∂Gb) = (x b , y)f(y) dy,∂n xdove x b ∈ ∂Ω. Sia∫w(x) =∂ΩΩΩG Dir (x, y)g(y) dσ y , x ∈ Ω,(VI.37a)(VI.37b)4 Per n = 2 la funzione <strong>di</strong> Green non tende a zero all’infinito, creando parecchi problemitecnici nel trattamento dell’equazione <strong>di</strong> Poisson nell’intero piano.132
la soluzione unica dell’equazione <strong>di</strong> Laplace ∆w = 0 in Ω con con<strong>di</strong>zione alcontorno w| ∂Ω= g. Allora il problema al contorno−∆u = f(x), x ∈ Ω, (VI.38a)u(x b ) = g(x b ), x b ∈ ∂Ω, (VI.38b)ha la soluzione unica che ha la forma∫∫( ∫)u(x) = G(x, y)f(y) dy + G Dir (x, y) g(y) − G(y, z)f(z) dz dσ yΩ∂ΩΩ∫ [ ∫]= G(x, y) − G Dir (x, z)G(z, y) dσ z f(y) dyΩ∂Ω∫+ G Dir (x, y)g(y) dσ y .(VI.39)∂ΩDunque se g(x) = 0 per x ∈ ∂Ω [il problema <strong>di</strong> Dirichlet omogeneo], la funzione<strong>di</strong> Green G(x, y) è da correggere da un termine regolare.In modo analogo, sia∫w(x) = G Neu (x, y)h(y) dσ y , x ∈ Ω,∂Ωla soluzione dell’equazione <strong>di</strong> Laplace ∆w = 0 in Ω con con<strong>di</strong>zione al contorno(∂w/∂n)| ∂Ω= h, dove ∫ w(y) dy = 0. Una tale soluzione esiste (e è unica)Ωse e solo se ∫ h(y) dσ ∂Ω y = 0. Allora sotto la con<strong>di</strong>zione ∫ h(y) dσ ∂Ω y = 0 ilproblema al contorno∫Ω−∆u = f(x), x ∈ Ω, (VI.40a)∂u∂n (x b) = h(x b ), x b ∈ ∂Ω, (VI.40b)u(y) dy = 0,(VI.40c)ha la soluzione unica che ha la forma∫∫( ∫)∂Gu(x) = G(x, y)f(y) dy + G Neu (x, y) h(y) − (y, z)f(z) dz dσ yΩ∂ΩΩ ∂n y∫ [ ∫= G(x, y) − G Neu (x, z) ∂G ](z, y) dσ z f(y) dyΩ∂Ω ∂n∫z+ G Neu (x, y)h(y) dσ y .(VI.41)∂ΩDunque se h(x) = 0 per x ∈ ∂Ω [il problema <strong>di</strong> Neumann omogeneo], lafunzione <strong>di</strong> Green G(x, y) è da correggere da un termine regolare.133
Utilizzando il linguaggio dell’elettro<strong>di</strong>namica consideriamo ora il potenziale<strong>di</strong> un <strong>di</strong>polo. Sia h > 0 piccola. Consideriamo le cariche −1/h e 1/h neipunti x 0 e x 0 + he, dove ‖e‖ 2 = 1. Il corrispondente potenziale u sod<strong>di</strong>sfaall’equazione <strong>di</strong> Poisson− ∆u = 1 h {δ(x − (x 0 + he)) − δ(x − x 0 )} .(VI.42)Per h → 0 + la parte a destra tende alla derivata <strong>di</strong> δ(x − x 0 ) nella <strong>di</strong>rezionee rispetto alla variabile x 0 . In altre parole, la parte a destra dell’equazione(V.42) tende ae · ∇ x014π‖x − x 0 ‖ 2= e · (x − x 0)4π‖x − x 0 ‖ 3 2=cos θ4π‖x − x 0 ‖ 2 2se h → 0 + , dove θ è l’angolo tra i vettori x − x 0 e e. Partendo da una<strong>di</strong>stribuzione <strong>di</strong> <strong>di</strong>poli normali alla superficie ∂Ω (da una cosiddetta doublelayer) con densità b ∈ L 1 (∂Ω, dσ), otteniamou(x) = 14π∫∂Ωcos(angolo(x − ξ, n(ξ)))b(ξ) dσ(ξ).‖x − ξ‖ 2 2(VI.43)L’espressione (V.43) si <strong>di</strong>ce double layer potential. 5Consideriamo ora una <strong>di</strong>stribuzione <strong>di</strong> cariche su una superficie ∂Ω. Allorail corrispondente potenziale (con densità a ∈ L 1 (∂Ω; dσ(ξ)) ha la formau(x) = 14π∫∂Ωa(ξ)‖x − ξ‖ 2dσ(ξ).L’espressione (V.44) si <strong>di</strong>ce single layer potential. 43.1.cEquazione <strong>di</strong> Laplace nel semipianoConsideriamo l’equazione <strong>di</strong> Laplace(VI.44)∆u = 0(VI.45)nel semipiano {(x, y) ∈ R 2 : y > 0} sotto la con<strong>di</strong>zione u(x, 0) = u 0 (x). Siccomee iλx e −|λ|y è soluzione dell’equazione <strong>di</strong> Laplace limitata nel piano superiorequalunque sia λ ∈ R, rappresntiamo la soluzione della (V.45) nella formau(x, y) =∫ ∞−∞c(λ)e iλx e −|λ|y dλ,5 Questa espressione non rende conto <strong>di</strong> un’eventuale con<strong>di</strong>zione al contorno. In tal casoci vuole una correzione da un termine regolare come in (V.39) e (V.41).134
dove c ∈ L 2 (R). Sostituendo y = 0 si ottieneu 0 (x) =∫ ∞−∞e iλx c(λ) dλ,che vuol <strong>di</strong>re che u 0 ∈ L 2 (R) e ‖c‖ 2 = (2π) 1/2 ‖u 0 ‖ 2 . Invertendo la trasformata<strong>di</strong> Fourier si hac(λ) = 1 ∫ ∞e −iλx u 0 (x) dx.2πInfine otteniamou(x, y) =∫ ∞−∞−∞dove la funzione <strong>di</strong> Green ha l’espressioneG(x, ˆx; y)u 0 (ˆx) dˆx,(VI.46)G(x, ˆx; y) = 12π∫ ∞−∞e iλ(x−ˆx) e −|λ|y dλ = 1 πyy 2 + (x − ˆx) 2 .(VI.47)Ovviamente sono operatori lineari limitati le trasformazioni u 0 ↦→ u(·, y)per ogni y ≥ 0 (da L 2 (R) in se stesso) e u 0 ↦→ u (da L 2 (R) in l 2 ({(x, y) ∈ R 2 :y > 0}). Inoltre la trasformazione u 0 ↦→ u(·, y) è limitato da BC(R) [oppureC 0 (R)] in se stesso, uniformemente in y ≥ y 0 per ogni y 0 > 0.3.1.dEquazione <strong>di</strong> Laplace nel <strong>di</strong>scoConsideriamo l’equazione <strong>di</strong> Laplace (V.45) nel <strong>di</strong>sco D = {(x, y) ∈ R 2 :√x2 + y 2 < L} sotto le con<strong>di</strong>zioni al contornou = g sul bordo ∂D.(VI.48)Ponendo Ω = D, assumiamo che g sia continua sulla circonferenza ∂D, ecerchiamo una soluzione u ∈ C 2 (Ω) ∩ C 1 (Ω). In coor<strong>di</strong>nate polari l’equazione<strong>di</strong> Laplace ha la forma1r∂∂r(r ∂u )+ 1 ∂ 2 u∂r r 2 ∂θ = 0, 2dove 0 ≤ θ < 2π (con perio<strong>di</strong>cità) e 0 < r < L con continuità della soluzioneper r → 0 + . La separazione delle variabili conduce alle soluzioni u 0 (r),u m (r) cos mθ e u m (r) sin mθ, dove m = 0, 1, 2, . . . e la funzione u m (r) sod<strong>di</strong>sfal’equazione <strong>di</strong>fferenziale or<strong>di</strong>naria1rddr(r du mdr)− m2r 2 u m(r) = 0.135(VI.49)
L’equazione (V.48) è un’equazione <strong>di</strong> Eulero [r 2 u ′′ m(r)+ru ′ m(r)−m 2 u m (r) = 0]con la soluzione generaleu m (r) ={c 1 + c 2 ln(r), m = 0c 1 r m + c 2 r −m , m = 1, 2, . . . ,dove c 1 e c 2 sono costanti arbitrarie. La continuità se r → 0 + conduce ad unasoluzione costante se m = 0 e una proporzionale a r m se m = 1, 2, . . .. Quin<strong>di</strong>la soluzione generale ha la formau(r, θ) = a 02 + ∞∑n=1r n (a n cos nθ + b n sin nθ) ,(VI.50)dove a 0 , a 1 , b 1 , a 2 , b 2 , . . . sono opportune costanti.Sostituiamo r = L in (V.50) e applichiamo la con<strong>di</strong>zione al contorno u(L, θ)= g(θ). Risultag(θ) = a 02 + ∞∑n=1L n (a n cos nθ + b n sin nθ) .(VI.51)Applicando la teoria delle serie <strong>di</strong> Fourier abbiamo for n = 1, 2, . . .⎧⎪⎨ a 0 = 1 π∫ π⎪⎩ a n L n = 1 π−π∫ πg(θ) dθ−πg(θ) cos nθ dθ,b n L n = 1 π∫ π−πg(θ) sin nθ dθ,dove la serie (V.51) è uniformente convergente in θ ∈ [−π, π] se g(θ) è continua(con g(−π) = g(π)) e regolare a tratti.Sostituiamo ora le espressioni per i coefficienti <strong>di</strong> Fourier nell’espressioneper la u(r, θ). Risultau(r, θ) = 1 π= 1 π= 1 π∫ π−π∫ π−π∫ π−π(1[1122 + ∞∑n=1( rL) n [cos nθ cos nˆθ + sin nθ sin nˆθ] ) g(ˆθ) dˆθ∞]2 + ∑ ( r) ncos n(θ − ˆθ) g(ˆθ) dˆθLn=1[∞∑ {( r) n ( r) n } ]1 + ei(θ−ˆθ) + e−i(θ−ˆθ) g(ˆθ) dˆθL Ln=1136
⎡ ⎧= 1 ∫ π1⎨ e i(θ−ˆθ) r⎣1 + Lπ −π 2 ⎩1 − e r i(θ−ˆθ) L(= 1 ∫ r 2π 1 −L)2π −π= 1 ∫ π2π −π1 − 2 r L cos(θ − ˆθ)( r 2g(ˆθ) dˆθ+L)L 2 − r 2L 2 − 2rL cos(θ − ˆθ) + r 2 g(ˆθ) dˆθ,e −i(θ−ˆθ) r ⎫⎤⎬+ L1 − e r ⎦ g(ˆθ) dˆθ−i(θ−ˆθ) ⎭Lil cosiddetto integrale <strong>di</strong> Poisson. Osserviamo che il nucleo <strong>di</strong> Poisson12πL 2 − r 2L 2 − 2rL cos(θ − ˆθ) + r 2è simmetrico in r e L e simmetrico in θ e ˆθ. Inoltre, è strettamente positivo;le sue uniche singolarità si trovano sulla circonferenza r = L per θ = ˆθ.Invece, se risolviamo l’equazione <strong>di</strong> Laplace in D sotto la con<strong>di</strong>zione <strong>di</strong>Neumann∂u= h sul bordo ∂D,∂n (VI.52)ci vuole la con<strong>di</strong>zione necessaria ∫ πh(θ) dθ = 0 per l’esistenza della soluzione.−πSiccome la derivata normale esterna coincide con quella ra<strong>di</strong>ale, cerchiamo lasoluzione u(r, θ) nella forma (V.50) con a 0 = 0 (per garantirne l’unicità), dove∞∑h(θ) = nr n−1 (a n cos nθ + b n sin nθ).(VI.53)n=1Applicando la teoria delle serie <strong>di</strong> Fourier risultanona n L n−1 = 1 π∫ π−πh(θ) cos nθ dθ,nb n L n−1 = 1 π∫ π−πh(θ) sin nθ dθ,dove la serie (V.53) è uniformente convergente in θ ∈ [−π, π] se h(θ) è continua,regolare a tratti e perio<strong>di</strong>ca nel senso che h(−π) = h(π). Sostituiamo ora leespressioni per i coefficienti <strong>di</strong> Fourier nell’espressione per la u(r, θ). Risultau(r, θ) = L π= L π∫ π= − L 2π∞∑−π n=1∫ π−π n=1∫ π1( r) n []cos nθ cos nˆθ + sin nθ sin nˆθ h(ˆθ) dˆθn L∞∑ 1( r) ncos n(θ − ˆθ)h(ˆθ) dˆθn Llog(1 − 2 r L cos(θ − ˆθ) + r2−π137L 2 )h(ˆθ) dˆθ,
dove abbiamo utilizzato ∑ ∞n=1 (zn /n) = − log(1 − z) per |z| < 1. 63.1.eEquazione <strong>di</strong> Laplace e funzioni analiticheOgni insieme aperto Ω in R 2 corrisponde ad un unico insieme aperto ˜Ω in Cnel seguente modo:(x, y) ∈ Ω ⇐⇒ x + iy ∈ ˜Ω, z ∈ ˜Ω ⇐⇒ (Re z, Im z) ∈ Ω.Ad ogni funzione analitica f : ˜Ω → C corrispondono due funzioni u, v : Ω → R<strong>di</strong> classe C ∞ che sod<strong>di</strong>sfano alle cosiddette equazioni <strong>di</strong> Cauchy-Riemann∂u∂x = ∂v∂y ,∂v∂x = −∂u ∂y .(VI.54)Infatti, u(x, y) = Re f(x + iy) e v(x, y) = Im f(x + iy) per (x, y) ∈ Ω. Diconseguenza, u and v sono funzioni armoniche nel senso che∂ 2 u∂x 2 + ∂2 u∂y 2 = 0,∂ 2 v∂x + ∂2 v2 ∂y = 0. 2(VI.55)D’altra parte, ogni coppia <strong>di</strong> funzioni armoniche u, v : Ω → R <strong>di</strong> classe C 2 chesod<strong>di</strong>sfa alle equazioni <strong>di</strong> Cauchy-Riemann (V.54) determina un’unica funzioneanalitica f : ˜Ω → C tale che u(x, y) = Re f(x + iy) e v(x, y) = Im f(x + iy)per (x, y) ∈ Ω. Le funzioni armoniche u, v si <strong>di</strong>cono coniugate armoniche. 7Consideriamo ora Ω = {(x, y) ∈ R 2 : √ x 2 + y 2 < L} e dunque ˜Ω = {z ∈C : |z| < L}. Come nella Subsection 3.1.d, cerchiamo una funzione armonicau : Ω → R che sod<strong>di</strong>sfa alla con<strong>di</strong>zione <strong>di</strong> Dirichlet (V.48). Sia v : Ω → Runa coniugata armonica <strong>di</strong> u e sia f : ˜Ω → C la funzione analitica definita daf(x+iy) = u(x, y)+iv(x, y) per (x, y) ∈ Ω. Scegliendo ρ ∈ (0, L), applichiamoora la formula integrale <strong>di</strong> Cauchyf(z) = 12πi∮|ζ|=ρf(ζ)dζ, |z| < ρ.ζ − zSia z ∗ = ρ 2 /z. Allora |z ∗ | = ρ 2 /|z| > ρ. Dal Teorema <strong>di</strong> Cauchy segue∮1 f(ζ)dζ = 0.2πi |ζ|=ρ ζ − z∗ 6 Si intende il ramo del logaritmo che è una funzione analitica nel semipiano complessodestro con valore log(1) = 0.7 Conoscendo u, si può trovare v dalle equazioni <strong>di</strong> Cauchy-Riemann, ma tranne untermine constante arbitrario.138
Di conseguenza,f(z) = 1 ∮ [ 1f(ζ)2πi |ζ|=ρ ζ − z − 1 ]dζ.ζ − z ∗(VI.56)Ponendo ζ = ρe iˆθ e z = re iθ si calcola facilmente che1ζ − z − 1ζ − z ∗ = 1ζ − z − 1ζ − ζζzSostituendolo nella (V.56) otteniamou(re iθ ) = 12πi= 12π∫ πf(ρe iˆθ)−π∫ πf(ρe iˆθ)−π= |ζ|2 − |z| 2ζ|ζ − z| 2ρ 2 − r 2=ρe iˆθ(ρe iˆθ − re iθ )(ρe −iˆθ − re −iθ )ρ 2 − r 2=ρe iˆθ(ρ 2 + r 2 − 2ρr cos(θ − ˆθ)) .ρ 2 − r 2ρe iˆθ(ρ 2 + r 2 − 2ρr cos(θ − ˆθ)) iρeiˆθ dˆθρ 2 − r 2dˆθ.ρ 2 + r 2 − 2ρr cos(θ − ˆθ)Infine, per ρ → L − risulta per r ∈ [0, L) l’integrale <strong>di</strong> Poissonu(re iθ ) = 1 ∫ πL 2 − r 2g(ˆθ)dˆθ.2π −π L 2 + r 2 − 2Lr cos(θ − ˆθ)Sia Ξ un sottoinsieme aperto e semplicemente connesso 8 <strong>di</strong> R 2 tali cheΞ R 2 . Secondo il Teorema <strong>di</strong> Riemann ([9], Vol. III, Th. 1.2) esisteuna trasformazione biunivoca e analitica ˜φ : ˜Ξ → ˜Ω. In tal caso anche latrasformazione inversa ˜φ −1 : ˜Ω → ˜Ξ è analitica. Le trasformazioni ˜φ e ˜φ −1 sichiamano trasformazioni conforme. Definiamo ora φ : Ξ → Ω daφ(x, y) = (Re ˜φ(x + iy), Im ˜φ(x + iy)), (x, y) ∈ Ξ.Allora φ induce una corrispondenza biunivoca tra funzioni armoniche in Ξ efunzioni armoniche in Ω. Le funzioni armoniche in Ξ sono le funzioni φ −1 ◦u◦φ,dove u è armonica nel <strong>di</strong>sco Ω. Conoscendo le trasformazioni conformi tra Ξ eil <strong>di</strong>sco Ω tali che c’è anche la corrispondenza biunivoca tra i punti delle lorofrontiera, si può risolvere l’equazione <strong>di</strong> Laplace in Ξ sotto la con<strong>di</strong>zione <strong>di</strong>Dirichlet utilizzando le trasformazioni conformi e l’integrale <strong>di</strong> Poisson.8 Cioé, tale che il complementare R 2 \ Ξ è connesso, cioè un dominio senza buchi.139
3.1.fEquazione <strong>di</strong> Laplace nella sfera n-<strong>di</strong>mensionalePer n ≥ 2 conviene cercare le soluzioni dell’equazione <strong>di</strong> Laplace ∆u = 0 nellaregione sferica {x ∈ R n : ‖x‖ 2 < L} nella seguente forma:( r) lu(r, ω) = y(ω), r > 0, ω ∈ S n−1 , (VI.57)Ldove y(ω) è una funzione sferica <strong>di</strong> grado l = 0, 1, 2, . . .. Sia N(l, n) il numerodelle funzioni sferica <strong>di</strong> grado l in n variabili linearmente in<strong>di</strong>pendenti. 9 Alloraesiste una base ortonormale{y l,s (ω)} s=1,...,N(l,n);l=0,1,2,...dello spazio <strong>di</strong> Hilbert L 2 (S n−1 ) che consiste esclusivamente in funzioni sferiche.Data la funzione g ∈ L 2 (S n−1 ), si ha lo sviluppog(ω) =∞∑l=0N(l,n)∑s=1c l,s y l,s (ω),dove∫c l,s = (g, y l,s ) = g(ω)y l,s (ω) dω.S n−1In tal caso la funzione armonica u(r, ω) nelle regione sferica <strong>di</strong> raggio L chesod<strong>di</strong>sfa alla con<strong>di</strong>zione <strong>di</strong> Dirichlet u(L, ω) = g(ω) ha la formau(r, ω) =∞∑l=0( N(l,n)r l ∑L)s=1∫c l,s y l,s (ω) = G(r, ω, ˆω)g( ˆω) d ˆω,S n−1(VI.58)doveG(r, ω, ˆω) =∞∑l=0( N(l,n)r l ∑L)s=1y l,s (ω)y l,s ( ˆω).(VI.59)La funzione armonica u(r, ω) nella regione aferica che sod<strong>di</strong>sfa alla con<strong>di</strong>zioneal contorno ∂u (L, ω) = h(ω) ha la forma10∂ru(r, ω) =∞∑l=1Ll( N(l,n)r l−1 ∑L)s=1∫c l,s y l,s (ω) = H(r, ω, ˆω)g( ˆω) d ˆω,S n−1(VI.60)9 Quin<strong>di</strong> N(0, n) = 1, N(1, n) = n, N(l, 2) = 2 per l ≥ 1, N(l, 3) = 2l + 1, N(l, 4) =(l + 1) 2 , e N(l, n) = (2l+n−2)(l+n−3)!l! (n−2)!.10 Si spieghi poichè G(r, ω, ˆω) e H(r, ω, ˆω) <strong>di</strong>pendono soltanto da (r/L) e ω · ˆω.140
doveH(r, ω, ˆω) =∞∑l=1Ll( N(l,n)r l−1 ∑L)s=1y l,s (ω)y l,s ( ˆω).(VI.61)Per l’esistenza bisogna richiedere ∫ h(ω) dω = 0, mentre per l’unicitàS n−1richie<strong>di</strong>amo ∫ u(x) dx = 0.ΩPer n = 2 abbiamo N(l, 2) = 2 − δ l,0 , ω ≡ θ ∈ [0, 2π], y 0,1 (ω) = (2π) −1/2 ,y l,1 (ω) = π −1/2 cos(lθ), e y l,2 (θ) = π −1/2 sin(lθ). Dunque(G(r, θ, ˆθ) = 1 ∞)1π 2 + ∑ ( r) lcos l(θ − ˆθ) = 1 L 2 − r 2L2π L 2 − 2rL cos(θ − ˆθ) + r ,2l=1H(r, θ, ˆθ) = 1 π∞∑l=1Ll( rL) l=1cos l(θ − ˆθ) =12π log L 2L 2 − 2rL cos(θ − ˆθ) + r 2 .3.2 Equazione <strong>di</strong> HelmholtzUtilizzando la (V.31) e la (V.32) e applicando la separazione delle variabiliψ(r, ω) = R(r)ψ(ω) (con r > 0 e ω ∈ S n−1 ) all’equazione <strong>di</strong> Helmholtzn-<strong>di</strong>mensionalen∑∆ψ + k 2 ∂ 2 ψψ = + k 2 ψ = 0, (VI.62)∂x 2 jotteniamo l’equazione <strong>di</strong>fferenziale or<strong>di</strong>naria( ) ()1 d n−1 dRr + k 2 l(l + n − 2)− R(r) = 0,r n−1 dr drr 2j=1(VI.63)mentre y(ω) è una funzione sferica <strong>di</strong> grado l in n variabili. Per n = 2 risultal’equazione <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne l nella variabile kr. La sostituzione R(r) =r γ ˜R(r) nella (V.63) rende˜R ′′ (r) + 2γ + n − 1r˜R ′ (r) +()k 2 (l − γ)(l + γ + n − 2)−r 2˜R(r) = 0.Per γ = 1 − 1n risulta l’equazione <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne l − 1 + 1 n nella variabile2 2kr˜R ′′ (r) + 1 r ˜R ′ (r) +(k 2 − (l − 1 + 1 )2 n)2 ˜R(r) = 0. (VI.64)r 2Per risolvere l’equazione <strong>di</strong> Helmholtz non omogenea∆u + k 2 u(x) = −f(x), x ∈ R n , (VI.65)141
nella forma∫u(x) = E(x, y)f(y) dy,R n x ∈ R n ,bisogna introdurre una funzione E n (r) tale che (i) E(x, y) = E n (‖x − y‖),(ii) vale l’equazione <strong>di</strong>fferenziale(1 dr n−1 dE )n+ k 2 Er n−1 n (r) = − δ(r) ,dr drr n−1 Ω ndove Ω n é la misura <strong>di</strong> S n−1 , e (iii) E n (r) si comporta come onda sferica decrescentein R n per r → +∞. Per le applicazioni in fisica e ingegneria in cuiIm k ≥ 0, otteniamo per n ≥ 3 11E n (r) = − 1 ( ) (n−2)/2 kH (1)(n−2)/24π r(kr).(VI.66)Infatti, per n = 2, 3 risulta⎧⎨i4 H(1) 0 (kr), n = 2,E n (r) =⎩e ikr4πr , n = 3. (VI.67)Per n = 3 la soluzione dell’equazione <strong>di</strong> Helmholtz (V.65) ha la formau(x) = 1 e4π∫R ik‖x−y‖‖x − y‖ f(y) dy, x ∈ Rn . (VI.68)nConsideriamo l’equazione <strong>di</strong> Helmholtz tre<strong>di</strong>mensionale∆u + k 2 u = 1 (r 2 ∂u )− 1 r 2 ∂r r L Bu + k 2 u = 0,2(VI.69)dove Im k ≥ 0, r = ‖x‖ 2 > r 0 (> 0) e L B è l’operatore <strong>di</strong> Beltrami. Allorau(r, θ, ϕ) =∞∑ l∑l=0 m=−lu l,m (r)Y ml (θ, ϕ), (VI.70)dove∫u l,m (r) = u(r, θ, ϕ)Y l,m (θ, ϕ) sin ϕ dϕ dθ.S 211 Per n ≥ 3 e k → 0 deve risultare la (V.35). Ciò necessita uno stu<strong>di</strong>o del comportamentoasintotico della funzione H (1)(n−2)/2(kr) per k → 0.142
Sosituendo la (V.70) nella (V.69) e utilizzando L B Ylm(1 dr 2 du )l,m+r 2 dr dr= l(l + 1)Y ml()k 2 l(l + 1)− ur 2 l,m (r) = 0.Ponendo u l,m (r) = r −1/2 v l,m (r) si arriva all’equazione <strong>di</strong> Bessel(1 dr dv )l,m+(k 2 − (l + 1 )2 )2vr dr drr 2 l,m (r) = 0.otteniamo(VI.71)La limitatezza della soluzione per r → +∞ (per Im k ≥ 0) implica che v l,m (r) ∼(kr). Di conseguenzaH (1)l+ 1 2u(r, θ, ϕ) =∞∑l∑l=0 m=−la l,m r −1/2 H (1) (kr)Yl+ 1 l m (θ, ϕ). (VI.72)2Nel caso n-<strong>di</strong>mensionale (n ≥ 2) abbiamo invece della (V.69)∆u + k 2 u = 1 ( )n−1 ∂ur − 1r n−1 ∂r r L Bu + k 2 u = 0,n−1(VI.73)dove Im k ≥ 0, r = ‖x‖ 2 > r 0 (> 0) e L B è l’operatore <strong>di</strong> Beltrami n-<strong>di</strong>mensionale. Sviluppando la soluzione della (V.73) in funzioni sferiche (conL B y l = l(l + n − 2)y l , dove l = 0, 1, 2, . . . è il grado del polinomio armonicoomogeneo in n variabile che determina y l ), otteniamo invece della (V.71)1r n−1 ddr(r n−1 du l,mdr)+()k 2 l(l + n − 2)− ur n−1 l,m (r) = 0,(VI.74)dove m parametrizza gli altri in<strong>di</strong>ci della funzione sferica. Ponendo u l,m (r) =r −(n−2)/2 v l,m (r) arriviamo all’equazione <strong>di</strong> Bessel(1 dr dv )l,m+(k 2 − [l + 1 )(n − 2)]22vr dr drr 2 l,m (r) = 0.DunqueDi conseguenza,u(r, ω) =u l,m (r) ∼ r −(n−2)/2 H l+12 (n−2)(kr).∞∑ ∑l=0ma l,m r −(n−2)/2 H (1)l+ 1 2 (n−2)(kr)ym l (ω), (VI.75)dove ω ∈ S n−1 . Per n = 2 le funzioni sferiche coincidono con quelle trigonometriche;in questo caso risultau(r, θ) = a ∞∑ ()02 H(1) 0 (kr) + a l H (1)l(kr) cos(lθ) + b l H (1)l(kr) sin(lθ) .l=1143
4 Equazioni parabolicheL’equazione del calore∂u∂t = a2 ∆u + f,dove x ∈ Ω ⊂ R 3 , a > 0 e t > 0, ha una delle seguenti con<strong>di</strong>zioni iniziali:a. La con<strong>di</strong>zione iniziale u(x, t = 0) = u 0 (x) per x ∈ Ω;b. La con<strong>di</strong>zione al contorno u| S = u S [specificando la temperatura al bordo],oppure (∂u/∂n)| S = −(u 1 /k) [specificando il flusso <strong>di</strong> calore attraversail bordo], oppure k(∂u/∂n) + h(u − u amb )| S = 0 [dove u amb è latemperatura dell’ambiente e h il coefficiente <strong>di</strong> scambio <strong>di</strong> calore]. Inquest’equazione Ω è una regione con bordo S regolare a tratti.L’equazione del calore si può generalizzare comecon con<strong>di</strong>zione inizialedudt= −Lu(t) + f(t), t > 0, (VI.76)u(t = 0) = u 0 ,(VI.77)dove L è un operatore <strong>di</strong> Sturm-Liouville autoaggiunto sullo spazio <strong>di</strong> HilbertL 2 (Ω), u 0 è un vettore in L 2 (Ω) [modellizzando la temperatura iniziale], f(t) èun vettore in L 2 (Ω) continuo nel tempo t ≥ 0 [modelizzando i sorgenti <strong>di</strong> caloreal momento t], e u(t) è un vettore <strong>di</strong> L 2 (Ω) [modellizzando la temperatura almomento t]. Supponiamo che L abbia un numero infinito <strong>di</strong> autovalori λ n ,tutti non negativi, con base ortonormale <strong>di</strong> corrispondenti autofunzioni ϕ n :Lϕ n = λ n ϕ n , dove n = 1, 2, . . .. In tal caso ogni u ∈ L 2 (Ω) sod<strong>di</strong>sfa l’identità<strong>di</strong> Parseval∞∑‖u‖ 2 L 2 (Ω) = |(u, ϕ n )| 2 .n=1Da questa impostazione segue subitocon con<strong>di</strong>zione inizialeddt (u(t), ϕ n) = −λ n (u(t), ϕ n ) + (f(t), ϕ n )(u(t = 0), ϕ n ) = (u 0 , ϕ n ),dove n = 1, 2, . . . e il prodotto scalare è quello complesso <strong>di</strong> L 2 (Ω). Utilizzandola formula della variazione dei parametri si trova imme<strong>di</strong>atamente(u(t), ϕ n ) = e −λnt (u 0 , ϕ n ) +144∫ t0e −λn(t−s) (f(s), ϕ n ) ds.
Quin<strong>di</strong>u(x, t) =∞∑n=1∫=Ω[∫ te −λnt (u 0 , ϕ n ) +G(x, y; t)u 0 (y) dy +0∫ t]e −λn(t−s) (f(s), ϕ n ) ds ϕ n (x)0∫ΩG(x, y; t − s)f(s, y) dy ds,(VI.78)dove la funzione <strong>di</strong> Green∞∑G(x, y; t) = e −λnt ϕ n (x)ϕ n (y).n=1(VI.79)Secondo l’identità <strong>di</strong> Parseval abbiamo∞∑G(x, y; 0) = ϕ n (x)ϕ n (y) = δ(x − y).n=14.1 Esempi su intervalli limitatiEsempio VI.2 Poniamo Ω = (0, a) e Lu = −u ′′ con con<strong>di</strong>zioni <strong>di</strong> Dirichlet,cioè il problema al contorno∂u∂t = u−∂2 + f(x, t), 0 < x < a, t > 0;∂x2 u(0, t) = u(a, t) = 0,u(x, 0) = u 0 (x).In tal caso gli autovalori sono λ n = (nπ/a) 2 e le corrispondenti autofunzioniortonormalizzate in L 2 (0, 1) sono ϕ n (x) =Quin<strong>di</strong> la soluzione ha la formau(x, t) = 2 a+=∞∑n=1∫ t ∫ a0∫ 100[e −n2 π 2 t/a 2 sine −n2 π 2 (t−s)/a 2 f(y, s) sinG(x, y; t)u 0 (y) dy +√2a( nπx) ∫ au 0 (y) dy sina 0∫ t ∫ 101450( nπxanπxsin( ), dove n = 1, 2, . . ..a)sin( nπy)( nπyaa)]dy dsG(x, y; t − s)f(y, s) dy ds,
doveG(x, y; t) = 2 ∞∑e −n2 (π 2 t/a 2) sinan=1⎡= 1 ∞∑⎣1 + 2an=1( nπx)sina( nπy)a( − cos nπ(x+y)e −n2 (π 2 t/a 2 )a= −ϑ 3(π x+y , t/a 2ae−π2 ) + ϑ 3 (π x−y , t/a 2a e−π2 ),2a)+ cos2(nπ(x−y)a) ⎤in cui ϑ 3 (z, q) = 1 + 2 ∑ ∞n=1 qn2 cos(2nz) è una delle funzioni Theta <strong>di</strong> Jacobi([21], 21.11). 12Consideriamo Lu = −u ′′ nell’intervallo (0, a) con le con<strong>di</strong>zioni <strong>di</strong> Neumannu ′ (0) = u ′ (a) = 0. In tal caso λ n = (nπ/a) 2 e ϕ n (x) =dove n = 0, 1, 2, 3, . . .. Allorau(x, t) =∫ a0G(x, y; t)u 0 (y) dy +∫ t ∫ a00√2−δ n0aG(x, y; t − s)f(y, s) dy ds,⎦cos(nπx/a),dove[G(x, y; t) = 1 ∞∑(1 + 2 e −n2 (π 2 t/a 2) nπx) ( nπy) ]cos cosaa an=1⎡( )= 1 ∞∑⎣1 cos nπ(x+y)+ cos+ 2 e −n2 (π 2 t/a 2 )aa2n=1= ϑ 3(π x+y , t/a 2ae−π2 ) + ϑ 3 (π x−y , t/a 2a e−π2 ).2a(nπ(x−y)a) ⎤⎦Consideriamo ora Lu = −u ′′ nell’intervallo (0, a) con la con<strong>di</strong>zione <strong>di</strong> Dirichletall’estremo sinistro e quella <strong>di</strong> Neumann all’estremo√destro: u(0) =u ′ (a) = 0. In tal caso λ n = ((n + 1 2 )π/a)2 2e ϕ n (x) = sin((n + 1)πx/a),a 2dove n = 0, 1, 2, 3, . . .. Allorau(x, t) =∫ a0G(x, y; t)u 0 (y) dy +∫ t ∫ a00G(x, y; t − s)f(y, s) dy ds,12 Si ha ϑ 3 (z, q) = G ∏ ∞n=1 (1 + 2q2n−1 cos(2z) + q 4n−2 ), dove G = ∏ ∞n=1 (1 − q2n ).146
doveG(x, y; t) = 2 ∞∑( ) ( )e −(2n+1)2 (π 2 t/4a 2) (2n + 1)πx (2n + 1)πysinsina2a2an=0= 1 ∞∑{ ( )e −(2n+1)2 (π 2 t/4a 2 ) (2n + 1)π(x + y)− cosa2an=0( )}(2n + 1)π(x − y)+ cos2a= −ϑ 2(π x+y , t/a 2 ) + ϑae−π2 2 (π x−y , t/a 2 )a e−π2 ,2ain cui ϑ 2 (z, q) = 2 ∑ ∞n=0 /4 q(2n+1)2 cos((2n + 1)z) è una delle funzioni Theta <strong>di</strong>Jacobi ([21], 21.11). 13Consideriamo infine Lu = −u ′′ nell’intervallo (0, a) con con<strong>di</strong>zioni perio<strong>di</strong>che.In tal caso ci sono un autovalore semplice λ 0 = 0 con autofunzionecorrispondente ϕ 0 (x) =√1e gli autovalori doppi λ a n = (2nπ/a) 2 con auto-√√2cos(2nπx/a) e a ϕs 2n(x) = sin(2nπx/a),afunzioni corrispondenti ϕ c n(x) =dove n = 1, 2, 3, . . .. Alloradoveu(x, t) =∫ a0G(x, y; t)u 0 (y) dy +[G(x, y; t) = 1 ∞∑1 + 2 ean=1( ) 2nπx+ sin sina[= 1 ∞∑1 + 2 ean=1= 1 ( π(x − y)a ϑ 3a2nπ−( a∫ t ∫ a00G(x, y; t − s)f(y, s) dy ds,{ ( ) ( ))2 t 2nπx 2nπycos cosaa( )}] 2nπya2nπ−( a )2t cos), e −( 2π a )2 t.( ) ]2nπ(x − y)Esempio VI.3 Adesso <strong>di</strong>scutiamo il caso Ω = {(x, y) ∈ R 2 : √ x 2 + y 2 < L}e L = −∆ con la con<strong>di</strong>zione <strong>di</strong> Dirichlet al bordo. In tal caso gli autovaloriλ > 0. Infatti,1r∂∂r(r ∂u )+ 1 ∂ 2 u∂r r 2∂θ + ∂2 u= −λu(r, θ),2 ∂z (VI.80)2a13 Si ha ϑ 2 (z, q) = 2Gq 1/4 cos(z) ∏ ∞n=1 (1 + 2q2n cos(2z) + q 4n ), dove G = ∏ ∞n=1 (1 − q2n ).147
e applicando la solita separazione delle variabili arriviamo, per λ > 0, all’equazione<strong>di</strong>fferenzialed 2 Rd(r √ λ) + 1( )2 r √ dRλ d(r √ λ) + 1 − m2(r √ R(r) = 0,λ) 2dove m = 0, 1, 2, . . . e R(r) è limitato se r → 0 + . Allora R(r) ∼ J m (r √ λ),mentre R(L) = 0. Quin<strong>di</strong> gli autovalori sono λ mn = (ν mn /L) 2 [essendo ν mn lozero positivo n-esimo della J m (x)], dove m = 0, 1, 2, . . . e n = 1, 2, 3, . . .. Leautofunzioni normalizzate in L 2 (Ω) ≃ L 2 ([0, L] × [0, 2π]; rdr dθ) sono⎧1( ν0n r)ϕ 0n (r, θ) =, n = 1, 2, 3, . . .L √ π|J⎪⎨0(ν ′ 0n )| J 0√ L2 cos mθ(ϕ c mn(r, θ) =L √ π|J m(ν ′ mn )| J νmn rm√ L2 sin mθ(⎪⎩ ϕ s mn(r, θ) =L √ π|J m(ν ′ mn )| J νmn rmLLe costanti <strong>di</strong> normalizzazione seguono dall’identità∫ L ∫ 2π ( νmn r)rJ m cos mθ dθdr = (1 + δ m0 )πL00), m = 1, 2, 3, . . . , n = 1, 2, . . .), m = 1, 2, 3, . . . , n = 1, 2, . . . .∫ L= (1 + δ m0 ) L22 J m(ν ′ mn ) 2 ,e ugualmente con sin mθ al posto <strong>di</strong> cos mθ se m ≥ 1.Risultadoveu(r, θ, t) =+∫ ∞ ∫ 2π0 0∫ t ∫ ∞ ∫ 2πG(r, ˆr, θ − ˆθ; t) =+ 2m=100rG(r, ˆr, θ − ˆθ; t)u 0 (r, θ) dθ dr00( νmn r)rJ m drLˆrG(r, ˆr, θ − ˆθ; t − s)f(ˆr, ˆθ, s) dˆθ dˆr ds,⎡ ( ν0n r) ( ) ν0nˆr∞∑J 0 J 0⎢L L⎣ e−ν2 0n t/L2 πL 2 J 0(ν ′ 0n ) 2n=1( νmn r) ( )⎤νmnˆr∞∑ J m J m cos[m(θ −L Lˆθ)]e −ν2 mnt/L 2 ⎥πL 2 J m(ν ′ mn ) 2⎦ ,in cui abbiamo utilizzato la formulacos(m[θ − ˆθ]) = cos mθ cos mˆθ − sin mθ sin mˆθ.148
4.2 Esempi su domini illimitatiEsempio VI.4 Consideriamo il problema a valori iniziali⎧⎨∂u∂t (x, t) = ∂2 u+ f(x, t), x ∈ R, t > 0,∂x2 ⎩u(x, 0) = u 0 (x).(VI.81)Applicando la trasformata <strong>di</strong> Fourier uni<strong>di</strong>mensionale u ↦→ Fû otteniamo⎧⎨∂û∂t (ξ, t) = −ξ2 û(ξ, t) + ˆf(ξ, t), ξ ∈ R, t > 0,(VI.82)⎩û(ξ, 0) = û 0 (ξ).La soluzione del problema (V.82) è elementare:Quin<strong>di</strong>û(ξ, t) = e −ξ2tû 0 (ξ) +∫ t0e −ξ2 (t−τ) ˆf(ξ, τ) dτ.(VI.83)doveu(x, t) = 12π= 12π=G(x, t) = 12π∫ ∞−∞∫ ∞−∞∫ ∞−∞∫ ∞e ixξ û(ξ, t) dξe ixξ [e −ξ2tû 0 (ξ) +G(x − y; t)u 0 (y) dy +−∞∫ t]e −ξ2 (t−τ) ˆf(ξ, τ) dτ dξ0∫ t ∫ ∞0−∞e ixξ e −ξ2t dξ = 1 ∫ ∞/4t2π e−x2−∞G(x − y; t − τ)f(y, τ) du dτ,ix−(ξ−e 2t) 2t dξ = √ 1 e −x2 /4t . 4πtEsempio VI.5 Consideriamo ora il problema a valori iniziali e al contorno⎧∂u⎪⎨∂t (x, t) = ∂2 u∂x + f(x, t), x ∈ 2 R+ , t > 0,u(0, t) = 0, x ∈ R⎪⎩+ ,(VI.84)u(x, 0) = u 0 (x).Per risolvere la (V.84) introduciamo la trasformata <strong>di</strong> Fourier seno(F s u)(ξ) =√2π∫ ∞0u(x) sin(xξ) dx =−i √2π û(ξ),(VI.85)149
dove u(x) = −u(−x) per x ∈ R − è l’estensione <strong>di</strong> u ad una funzione <strong>di</strong>spari.Si vede subito che√ ∫ 2 ∞u(x) = (F s u)(ξ) sin(xξ) dξ. (VI.86)πApplicando la trasformata <strong>di</strong> Fourier seno F s alla (V.82) risulta⎧⎨∂F s u(ξ, t) = −ξ 2 (F s u)(ξ, t) + (F s f)(ξ, t), ξ ∈ R + , t > 0,∂t⎩(F s u)(ξ, 0) = (F s u 0 )(ξ),e ha la soluzione unica (V.83). Dunque√ ∫ 2 ∞u(x, t) = sin(xξ)(F s u)(ξ, t)π 0√ ∫ 2 ∞[= sin(xξ) e −ξ2t (F s u 0 )(ξ) +π=∫ ∞00G s (x, y; t)u 0 (y) dy +0∫ t ∫ ∞00∫ t0(VI.87)]e −ξ2 (t−τ) (F s f)(ξ, τ) dτ dξG s (x, y; t − τ)f(y, τ) dy dτ,dove 14G s (x, y; t) = 2 π∫ ∞0∫ ∞sin(xξ) sin(yξ)e −ξ2t dξ= 1 e −ξ2t {− cos((x + y)ξ) + cos((x − y)ξ)} dξπ 0= √ 1][−e −(x+y)2 /4t + e −(x−y)2 /4t. (VI.88)4πtConsideriamo ora il problema a valori iniziali e al contorno⎧∂u⎪⎨ ∂t (x, t) = ∂2 u∂x + f(x, t), x ∈ 2 R+ , t > 0,∂u⎪⎩∂x (0, t) = 0, x ∈ R+ ,u(x, 0) = u 0 (x).(VI.89)Per risolvere la (V.89) introduciamo la trasformata <strong>di</strong> Fourier coseno(F c u)(ξ) =√2π∫ ∞0u(x) cos(xξ) dx = 1 √2π û(ξ),(VI.90)14 Si utilizza 1 π∫ ∞0e −z2t cos(zt) dz = 1 √4πte −z2 /4t . Ve<strong>di</strong> [1], Eq. 7.4.6.150
dove u(x) = u(−x) per x ∈ R − è l’estensione <strong>di</strong> u ad una funzione pari. Sivede subito che√ ∫ 2 ∞u(x) = (F c u)(ξ) cos(xξ) dξ. (VI.91)πApplicando la trasformata <strong>di</strong> Fourier coseno F c alla (V.89) risulta⎧⎨∂F c u(ξ, t) = −ξ 2 (F c u)(ξ, t) + (F c f)(ξ, t), ξ ∈ R + , t > 0,∂t⎩(F c u)(ξ, 0) = (F c u 0 )(ξ),e ha la soluzione unica (V.83). Dunque√ ∫ 2 ∞u(x, t) = cos(xξ)(F c u)(ξ, t)π 0√ ∫ 2 ∞[= cos(xξ) e −ξ2t (F c u 0 )(ξ) +πdove=∫ ∞00G c (x, y; t)u 0 (y) dy +G c (x, y; t) = 2 π∫ ∞0∫ ∞0∫ t ∫ ∞00∫ tcos(xξ) cos(yξ)e −ξ2t dξ0(VI.92)]e −ξ2 (t−τ) (F c f)(ξ, τ) dτ dξG c (x, y; t − τ)f(y, τ) dy dτ,= 1 e −ξ2t {cos((x + y)ξ) + cos((x − y)ξ)} dξπ 0= √ 1][e −(x+y)2 /4t + e −(x−y)2 /4t. (VI.93)4πtEsempio VI.6 Consideriamo infine il problema a valori iniziali⎧⎨∂u∂t (x, t) = ∆u + f(x, t), x ∈ Rn , t > 0,⎩u(x, 0) = u 0 (x).(VI.94)Applicando la trasformata <strong>di</strong> Fourier uni<strong>di</strong>mensionale u ↦→ Fû otteniamo⎧⎨∂û∂t (ξ, t) = −|ξ|2 û(ξ, t) + ˆf(ξ, t), ξ ∈ R n , t > 0,(VI.95)⎩û(ξ, 0) = û 0 (ξ).La soluzione del problema (V.95) è elementare:û(ξ, t) = e −|ξ|2tû 0 (ξ) +∫ t0e −|ξ|2 (t−τ) ˆf(ξ, τ) dτ.(VI.96)151
Quin<strong>di</strong>u(x, t) = 1 ∫ ∞e i(x·ξ) û(ξ, t) dξ(2π) n −∞= 1 ∫ [e i(x·ξ) e −|ξ|2tû(2π) n 0 (ξ) +R∫n ∫ t ∫= G(x − y; t)u 0 (y) dy +R n 0doveG(x, t) = 1(2π) n ∫R n= 1(2π) n e−|x|2 /4te i(x·ξ) e −|ξ|2t dξ∫eR nix−(ξ+ 2t5 Equazioni iperbolicheL’equazione delle onde ha la forma∫ t0R n]e −|ξ|2 (t−τ) ˆf(ξ, τ) dτ dξG(x − y; t − τ)f(y, τ) dy dτ,( ) nix,ξ+ 2t1)t dξ = √ e −|x|2 /4t .4πt∂ 2 u∂t 2 = c2 ∆u, (VI.97)dove c > 0 è la velocità della onda, x ∈ Ω (un aperto connesso e limitato inR n con frontiera ∂Ω superficie regolare a tratti), e valgono la con<strong>di</strong>zione <strong>di</strong>Dirichletu(x, t) = 0, x ∈ ∂Ω, (VI.98)e le due con<strong>di</strong>zioni inizialiLa separazione delle variabiliconduce alle equazioniu(x, 0) = u 0 (x),∂u∂t (x, 0) = u 1(x).u(x, t) = ψ(x)T (t)(VI.99a)(VI.99b)(VI.100)1c 2 T ′′ (t)T (t) = ψ′′ (x)ψ(x) = costante,ψ(x) = 0 per x ∈ ∂Ω.(VI.101a)(VI.101b)152
Supponiamo che l’equazione <strong>di</strong> Helmholtz∆ψ + λ 2 ψ = 0su Ω con la con<strong>di</strong>zione <strong>di</strong> Dirichlet abbia un infinito numerabile <strong>di</strong> autovaloripositivi λ 2 n (dove λ n ≤ λ n+1 ) con autofunzioni corrispondenti ϕ n che formanouna base ortonormale <strong>di</strong> L 2 (Ω). In tal caso la costante nella (V.101a) vale−λ 2 n, e quin<strong>di</strong>T (t) = c n cos(cλ n t) + d n sin(cλ n t).La soluzione generale della equazione delle onde (V.103b) con la con<strong>di</strong>zione <strong>di</strong>Dirichlet (V.98) ha la formau(x, t) =∞∑(c n cos(cλ n t) + d n sin(cλ n t)) ψ n (x). (VI.102)n=1Quin<strong>di</strong> dalle (V.99) otteniamo∞∑u 0 (x) = c n ψ n (x),u 1 (x) =n=1∞∑d n cλ n ψ n (x).n=1(VI.103a)(VI.103b)Dall’ortonormalità delle autofunzioni ψ n in L 2 (Ω) seguono i coefficienti c n ed n :∫c n = 〈u 0 , ψ n 〉 L2 (Ω) = u 0 (x)ψ n (x) dx, (VI.104a)d n = 〈u 1, ψ n 〉= 1 u 1 (x)ψ n (x) dx.cλ n cλ n∫ΩΩ(VI.104b)Lo stesso <strong>di</strong>scorso vale se al posto della con<strong>di</strong>zione <strong>di</strong> Dirichlet (V.98) siconsidera la con<strong>di</strong>zione <strong>di</strong> Neumann. L’unica <strong>di</strong>fferenza è che ora zero è autovalore(con l’autofunzione costante) dell’equazione <strong>di</strong> Helmholtz su Ω con lacon<strong>di</strong>zione <strong>di</strong> Neumann. Al posto della (V.102) si consideri orau(x, t) =+1√mis(Ω)(c 0 + d 0 t)∞∑(c n cos(cλ n t) + d n sin(cλ n t)) ψ n (x), (VI.105)n=1153
dove ψ 0 (x) = 1/ √ mis(Ω) è l’autofunzione normalizzata corrispondente all’autovalorezero. Per n ≥ 1 si trovano le espressioni (V.102) e (V.104b),mentre∫Ωc 0 =u ∫0(x) dx√ , d 0 =u Ω 1(x) dx√ .m(Ω) m(Ω)Nel caso in cui Ω = (0, L), abbiamo per le con<strong>di</strong>zioni <strong>di</strong> Dirichletλ n = nπ √2( nπx)L , ψ n(x) =L sin , (VI.106)Ldove n = 1, 2, 3, . . ., e per le con<strong>di</strong>zioni <strong>di</strong> Neumannλ n = nπ √2( nπx)L , ψ n(x) =L cos , (VI.107)Ldove n = 1, 2, 3, . . ., mentre λ 0 = 0 e ψ 0 (x) = 1/ √ L.Nel caso delle con<strong>di</strong>zioni <strong>di</strong> Dirichlet, utilizzando le espressioni( nπx) ( ) nπct( nπ) ( nπ)2 sin cos = sinL LL (x − ct) + sinL (x + ct) ,( nπx) ( ) nπct( nπ) ( nπ)2 sin sin = cosL LL (x − ct) − cosL (x + ct) ,e sostituendo la (V.106) nella (V.102), otteniamou(x, t) = 1 √2∞∑ ( nπ) ( nπ)]c n[sin2 LL (x − ct) + sinL (x + ct) n=1+ 1 √2∞∑ ( nπ) ( nπ)]d n[cos2 LL (x − ct) − cosL (x + ct) n=1= 1 ∞∑c n [ψ n (x − ct) + ψ n (x + ct)] + 1 ∞∑d n c nπ 22c Ln=1???= 1 2 [u 0(x − ct) + u 0 (x + ct)] + 1 2c∫ x+ctx−ctn=1∫ x+ctx−ctψ n (˜x) d˜xu 1 (˜x) d˜x [SBAGLIATO],dove abbiamo utilizzato gli sviluppi <strong>di</strong> Fourier (V.103) e esteso le autofunzionicome fossero definite fuori dell’intervallo (0, L).Per c > 0 consideriamo l’equazione delle onde∂ 2 u∂t (x, t) = ∂2 u2 c2 (x, t) + f(x, t),∂x (VI.108a)2u(x, 0) = u 0 (x),∂u∂t (x, 0) = u 1(x),154(VI.108b)(VI.108c)
dove x ∈ R e t > 0. Applicando la trasformata <strong>di</strong> Fourier arriviamo al sistema<strong>di</strong> equazioni∂ 2 û∂t (ξ, t) = 2 −c2 ξ 2 û(ξ, t) + ˆf(ξ, t),û(ξ, 0) = û 0 (ξ),∂û∂t (ξ, 0) = û 1(ξ),con la soluzione unicaû(ξ, t) = cos(cξt)û 0 (ξ)+ sin(cξt) û 1 (ξ)+cξPer ξ = 0 si calcola il limite:Quin<strong>di</strong>doveû(0, t) = û 0 (0) + tû 1 (0) +∫ t0∫ tu(x, t) = 1 ∫ ∞e −ixξ û(ξ, t) dξ = 1 ∫ ∞2π −∞2π −∞+ sin(cξt) ∫ tsin(cξ(t − τ))û 1 (ξ) +cξ0 cξ∫ ∞[ ∂G=−∞∫ t]+ G(x − y; t − τ)f(y, τ) dτ dy,00sin(cξ(t − τ))cξ(VI.109a)(VI.109b)(VI.109c)ˆf(ξ, τ) dτ. (VI.110)(t − τ) ˆf(0, τ) dτ. (VI.111)e −ixξ [cos(cξt)û 0 (ξ)]ˆf(ξ, τ) dτ dξ∂t (x − y; t)u 0(y) + G(x − y; t)u 1 (y)G(x − y; t) = 1 ∫ ∞−i(x−y)ξ sin(cξt)e dξ2π −∞ cξ∂G1(x − y; t) =∂t 2π= 1 [H(y − x + ct) + H(y − x − ct)] ,2c∫ ∞−∞e −i(x−y)ξ cos(cξt) dξ= 1 [δ(y − x + ct) − δ(y − x − ct)] .2In particolare, abbiamo trovato la cosiddetta soluzione <strong>di</strong> D’Alembertu(x, t) = 1 2 [u 0(x − ct) + u 0 (x + ct)]+ 1 2c∫ x+ctx−ctu 1 (y) dy + 1 2c155∫ t ∫ x+ct−cτ0x−ct+cτf(y, τ) dy dτ.
L’equazione delle onde (V.97) con un’opportuna con<strong>di</strong>zione al contorno ele con<strong>di</strong>zioni iniziali (V.99) ha la soluzione unica∫∫∂Gu(x, t) =∂t (x, ˆx; t)u 0(ˆx) dˆx + G(x, ˆx; t)u 1 (ˆx) dˆx, (VI.112)Ωdove la funzione <strong>di</strong> Green è molto singolare. Ciò si spiega dal principio <strong>di</strong>Huygens: Le singolarità presenti nella soluzione per t = 0 si propagano in tuttele <strong>di</strong>rezioni con velocità c quin<strong>di</strong> si manifestano nella soluzione al momentot > 0. Per esempio, generalizzando la risoluzione del sistema (V.108) perx ∈ R n si applichi la trasformazione <strong>di</strong> Fourier n-<strong>di</strong>mensionale per trovare lastessa forma della soluzione. Questa volta la funzione <strong>di</strong> Green ha l’espressioneΩG(x − y; t) = 1 ∫e −i(x−y)·ξ sin(ct‖ξ‖ 2)dξ, (VI.113a)(2π) n R c‖ξ‖∫n 2∂G1(x − y; t) = e −i(x−y)·ξ cos(ct‖ξ‖∂t (2π) n 2 ) dξ. (VI.113b)R n156
Appen<strong>di</strong>ce ALA FUNZIONE GAMMALa funzione Gamma è definita dall’integrale generalizzato assolutamente convergenteΓ(z) =∫ ∞0e −t t z−1 dt = 2∫ ∞0ρ 2z−1 e −ρ2 dρ, Re z > 0, (A.1)dove la convergenza assoluta segue spezzando l’intervallo <strong>di</strong> integrazione in due,in (0, 1) ed in (1, +∞). Infatti |e −t t z−1 | ≤ t Re z−1 per t ∈ (0, 1) e t α |e −t t z−1 | →0 se t → +∞ per ogni α > 1. La funzione Γ è analitica nel semipiano destroRe z > 0.Dopo un’integrazione per parti si ottiene facilmenteΓ(z + 1) = zΓ(z), Re z > 0. (A.2)Si ha Γ(1) = ∫ ∞0e −t dt = 1. Utilizzando la (A.2) risultaΓ(n + 1) = n!, n = 0, 1, 2, · · · . (A.3)Un altro valore particolare della funzione Gamma è quello per z = 1/2. Si haΓ( 1 2 ) = ∫ ∞0∫ ∞t −1/2 e −t dt = 2 e −u2 du = √ π.0Utilizzando la (A.2) si ottieneΓ(n + 1 1 · 3 · · · (2n − 1) √) = π, n = 0, 1, 2, · · · . (A.4)2 2 nL’identità (A.2) può essere utilizzata per definire la funzione Gamma altrove.Prima si definisca la funzione Gamma nella striscia −1 < Re z ≤ 0157
da Γ(z) = Γ(z + 1)/z, poi nella striscia −2 < Re z ≤ −1, ecc. Siccome ildenominatore nell’uguaglianza Γ(z) = Γ(z + 1)/z si annulla per z = 0, risultauna funzione meromorfa con poli semplici nei punti 0, −1, −2, . . .. Il residuenel polo a z = 0 é lim z→0 zΓ(z) = lim z→0 Γ(z + 1) = Γ(1) = 1, mentre quelloa −n (n = 1, 2, . . .) è il seguente+ 1)lim (z + n)Γ(z) = lim (z + n)Γ(z = . . .z→−n z→−n z= lim (z + n) Γ(z + n)z→−n z(z + 1) . . . (z + n − 1)= limz→−nΓ(z + n + 1)z(z + 1) . . . (z + n − 1) =Ha qualche importanza la funzione beta <strong>di</strong> Eulero:Γ(1)(−1) n (n!) = (−1)n .n!B(p, q) =∫ 1t p−1 (1 − t) q−1 dt = 2∫ π/200(sin θ) 2p−1 (cos θ) 2q−1 dθ,(A.5)dove Re p > 0 e Re q > 0.È abbastanza semplice <strong>di</strong>mostrare cheB(p, q) = Γ(p)Γ(q) , Re p, Re q > 0. (A.6)Γ(p + q)Infatti, per p, q tali che min(Re p, Re q) > 0 abbiamoΓ(p)Γ(q) = 4= 4∫ ∞ ∫ ∞0 0∫ ∞ ∫ π/20∫ ∞0t 2p−1 s 2q−1 e −(t2 +s 2) dt dsρ 2(p+q−1) e −ρ2 (cos θ) 2p−1 (sin θ) 2q−1 dθ dρ= 2 ρ 2(p+q−1) e −ρ2 dρ 2 2(cos θ) 2p−1 (sin θ) 2q−1 dθ00} {{ } } {{ }Γ(p+q)= Γ(p + q)B(p, q).∫ πt=cos 2 θ, 1−t=sin 2 θ, dt=−2 cos θ sin θ dθdove al passaggio dalla prima alla seconda riga abbiamo sostituito t = ρ cos θe s = ρ sin θ.Discutiamo ora una caratterizzazione potente della funzione Gamma.Teorema A.1 (Bohr-Mollerup) Sia f : (0, ∞) → R una funzione a valoripositivi con le seguenti proprietà:(a) log f(x) è una funzione convessa;158
(b) f(x + 1) = x f(x) per ogni x > 0;(c) f(1) = 1.Allora f(x) = Γ(x) per ogni x > 0.Dimostrazione. Sia f : (0, ∞) → R una funzione a valori positivi che hale proprietà (a)-(c). Allora la proprietà (b) implica l’identitàf(x + n) = x(x + 1) . . . (x + n − 1)f(x), x > 0, n ∈ N. (A.7)Per x ∈ (0, 1] e n ≥ 2 si ottiene dalla convessità 1 della funzione flog f(n − 1) − log f(n)(n − 1) − n≤log f(x + n) − log f(n)(x + n) − n≤log f(n + 1) − log f(n).(n + 1) − nSiccome f(m) = (m−1)! per m ∈ N (ve<strong>di</strong> la (b) e la (c)), risulta per 0 < x ≤ 1log(n − 1)! − log(n − 2)! ≤oppureoppurelog f(x + n) − log(n − 1)!x≤ log n! − log(n − 1)!,x log(n − 1) ≤ log f(x + n) − log(n − 1)! ≤ log n, 0 < x ≤ 1,(n − 1) x (n − 1)! ≤ f(x + n) ≤ n x (n − 1)!Applicando la (A.7) risulta per 0 < x ≤ 1(n − 1) x (n − 1)!x(x + 1) . . . (x + n − 1) ≤ f(x) ≤ x x (n − 1)!x(x + 1) . . . (x + n)Siccome lim n→∞ [ x+n ] = 1 per x ∈ [0, 1], si hanf(x) = limn→∞Dalla (A.1) si trova facilmente∫ nΓ(z) = limn→∞0n! n xx(x + 1) . . . (x + n) .(1 − t n) nt z−1 dt,[ x + nmentre n integrazioni per parti ci danno l’identità∫ n(1 −n) t nt z−1 n! n zdt =, Re z > 0.z(z + 1) . . . (z + n)0n].(A.8)Quin<strong>di</strong> le ultime due equazioni e la (A.8) implicano che f(x) = Γ(x) per ognix > 0.✷1 La convessità della g = log f implica che il rapporto g(n+1)−g(y)n − 1 a n + 1.159(n+1)−ycresce se y cresce da
Il teorema A.1 può essere applicato per <strong>di</strong>mostrare la seguente rappresentazioneprodotto∞∏ (Γ(z) = e−γz1 + z −1ez n) z/n , (A.9)n=1dove γ è la cosiddetta costante <strong>di</strong> Eulero tale che Γ(1) = 1. Sostituendo z = 1si trova∞∏(e γ = 1 +n) 1 −1e 1/n ,oppureγ ==n=1[∞∑ (1 + 1 ) ] −1e 1/kkk=1∞∑[ ]1k − log(k + 1) + log kk=1= limn→∞n∑[ ]1k − log(k + 1) + log kk=1Tornando alla (A.9) abbiamoΓ(z) = e−γzz= lim[(1 + 1n→∞ 2 + . . . + 1 )n= lim[(1 + 1n→∞ 2 + . . . + 1 ) ]− log n .nlimn∏n→∞k=1k e z/kz + k(e −γz n!= limn→∞ z(z + 1) . . . (z + n) exp z= limn→∞n! n zz(z + 1) . . . (z + n) .]− log(n + 1)(1 + 1 2 + . . . + 1 ))nQuin<strong>di</strong> abbiamo <strong>di</strong>mostrato che la funzione Γ(z) definita dal prodotto infinito(A.9) coincide con la funzione gamma introdotta prima.Per 0 < Re z < 1 si hae −γz n∏ kn∏Γ(z)Γ(1 − z) = limn→∞ z k + z ez/k · e−γ(1−z) k1 − z k + 1 − z e(1−z)/kk=1k=1n∏= e−γz(1 − z) limn→∞k=1k 2(k + z)(k + 1 − z) e1/k160
= limn→∞1= limn→∞ ze −γz(n + 1 − z)n∏k=1n∏k=1k 2(k + z)(k − z) = 1 zk 2(k + z)(k − z) e1/k∞∏k=1k 2(k + z)(k − z) = πsin(πz) ,secondo la rappresentazione prodotto della funzione sin(πz). Quin<strong>di</strong>Γ(z)Γ(1 − z) =πsin(πz) ,(A.10)valida per z ∈ C \ Z per l’unicità delle estensioni analitiche.161
162
Appen<strong>di</strong>ce BPROPRIETÀ ASINTOTICHE1 Rappresentazioni integrali delle funzioni <strong>di</strong>MacDonaldSiaφ ν (z) =dove z > 0 e ν ∈ R. AlloraDi conseguenza,φ ′ ν(z) = −φ ′′ν(z) =∫ ∞0∫ ∞0∫ ∞0e −z cosh t cosh(νt) dt,e −z cosh t cosh(νt) cosh t dt,e −z cosh t cosh(νt) cosh 2 t dt.∫ ∞z 2 φ ′′ν(z) + zφ ′ ν(z) − (z 2 + ν 2 )φ ν (z) = z 2 e −z cosh t cosh(νt)[cosh} {{ 2 t − 1}] dt0=sinh 2 t∫ ∞∫ ∞− z e −z cosh t cosh(νt) cosh t dt − ν 2 e −z cosh t cosh(νt) dt0= [ −ze −z cosh t cosh(νt) sinh t ] ∞+ z− z∫ ∞0∫ ∞00e −z cosh t {ν sinh(νt) sinh t + cosh(νt) cosh t} dt∫ ∞e −z cosh t cosh(νt) cosh t dt − ν 2 e −z cosh t cosh(νt) dt= [ −e −z cosh t ν sinh(νt) ] ∫ ∞∞+ e −z cosh t ν 2 cosh(νt) dt0∫ ∞− ν 2 e −z cosh t cosh(νt) dt = 0.0016300
Quin<strong>di</strong> φ ν (z) è una soluzione dell’equazione <strong>di</strong> Bessel immaginaria (II.57).Inoltre, siccome φ ν (z) → +∞ se z → 0 + (<strong>di</strong>vergenza dell’integrale per z = 0) eφ ν (z) → 0 se z → +∞, esiste una costante positive c ν tale che φ ν (z) = c ν K ν (z),la funzione <strong>di</strong> MacDonald (ve<strong>di</strong> la (II.56)).Inoltre, abbiamo√ z e z φ ν (z) = √ ∫ ∞z e −2z sinh2 (t/2) cosh(νt) dt0∫ ∞(= exp −2z sinh 20τ2 √ z)cosh( ντ2 √ z ) dτ.Siccome f(x) = sinh(x)/x è crescente per x ≥ 0 e f(0 + ) = 1, 1 si può stimarela funzione sotto il segno dell’ultimo integrale da e −τ 2 /2 cosh(ντ/ √ z) pergiustificare l’applicazione del Teorema delle Convergenza Dominata (cioè, loscambio limite-integrale, ve<strong>di</strong> l’appen<strong>di</strong>ce D), risultando inlimz→+∞Di conseguenza, φ ν (z) = K ν (z):K ν (z) =∫√ ∞√ π z e z φ ν (z) = e −τ 2 /2 dτ =2 .∫ ∞00e −z cosh t cosh(νt) dt, z > 0, ν ∈ R. (B.1)Sostituendo u = e −t nella (C.1) e poi v = 1/u si ottiene per z > 0∫ 1∫ 1K ν (z) = 1 2= 1 2= 1 20∫ 10∫ ∞0e − z 2 (u+ 1 u ) u −ν du u + 1 2e − z 2 (u+ 1 u ) u −ν du u + 1 2e − z 2 (u+ 1 u ) u −ν du u = 1 20∫ ∞1∫ ∞0e − z 2 (u+ 1 u ) u ν du ue − z 2 (v+ 1 v ) −ν dvuve − z 2 (u+ 1 u ) u −ν−1 du.Utilizzando la definizione della funzione Gamma e cambiando l’or<strong>di</strong>ne <strong>di</strong> integrazioneotteniamo per z > 0 e Re ν > − 1 2∫ ∞( ∫K ν (z) = e − z 2 (u+ 1 u ) 1 ∞)Γ(ν + 1) e −ux x ν− 1 du2 dx √2 u=0∫1 ∞2Γ(ν + 1) 20x ν− 1 21 Si ha f ′ (x) = cosh(x)x(x − tanh x) = cosh(x) ∫ x 2x 2 0164(∫ ∞0e −u(x+ z 2 )− z2udu√ u)dx.0( )1 − 1 dy > 0 per x > 0.cosh 2 y
Sostituendo w = u √ du(2x + z)/z [dunque: √ 1/4 dwu= (z/(2x + z)) √ w] e ponendoA = √ z(2x + z), arriviamo all’integrale doppio⎛∫1 ∞( ) ∫K ν (z) =Γ(ν + 1) x ν− 1 z 1/4 21 ∞2 0 2x + z ⎜ e − A 2 (w+ 1 w ) w −1/2 dw⎝2⎟0} {{ } ⎠ dx=1Γ(ν + 1 2 ) √ π2∫ ∞x ν− 1 20e −√ z(2x+z)2 √ 2x + z dx.⎞√ πK −1/2 (A)=K 1/2 (A)= 2A e−ASostituendo τ = √ (2x + z)/z, otteniamo le rappresentazioni integraliK ν (z) = Γ( 1)(2 z) ν∫ ∞Γ(ν + 1) (τ 2 − 1) ν− 1 2 e −τz dτ (B.2)22τ=1+2t=1Γ( 1)∫ ∞2Γ(ν + 1 e −z e −2zt t ν− 1 2 (t + 1)ν− 1 2 dt.2 )(2z)ν0(B.3)2 Sviluppo asintotico delle funzioni <strong>di</strong> BesselIntroduciamo prima il cosiddetto simbolo <strong>di</strong> Hankel(α, n) def= 2−2n{(4α 2 − 1)(4α 2 − 3) . . . (4α 2 − (2n − 1) 2 )} = Γ( 1 + α + n)2n!n! Γ( 1 + α − n),2(B.4)mentre (α, 0) = 1. Questo simbolo viene utilizzato per abbreviare gli sviluppiasintotici delle varie funzioni <strong>di</strong> Bessel se z → ∞ e ν è fisso.Sostituendo la serie <strong>di</strong> Taylor(1 + t) α =∞∑s=0Γ(α + 1)s! Γ(Γ(α + 1 − s) ts , |t| < 1,nella (C.3) e utilizzando la (A.1) risulta lo sviluppo asintotico (per z → ∞)√ π ∑ ∞(ν, s)K ν (z) ∼2z e−z(2z) , | arg z| < 3 π. (B.5)s 2s=0Introducendo le funzioni P (ν, z) e Q(ν, z) tali che√2H ν (1) (z) =πz {P (ν, z) + iQ(ν, z)} eiχ , −π < arg z < 2π,√2H ν (2) (z) =πz {P (ν, z) − iQ(ν, z)} e−iχ , −2π < arg z < π,165
dove χ = z −( 1ν + 1 )π, otteniamo dalla (C.5) e dalla seconda equazione (II.51)2 4P (ν, z) ∼∞∑s=0s (ν, 2s)(−1)(2z) ∼ 1 − (4ν2 − 1)(4ν 2 − 9)2s 2!(8z) 2+ (4ν2 − 1)(4ν 2 − 9)(4ν 2 − 25)(4ν 2 − 49)− · · · , (B.6a)4!(8z) 4∞∑s (ν, 2s + 1)Q(ν, z) ∼ (−1)(2z) 2s+1s=0∼ 4ν2 − 18z− (4ν2 − 1)(4ν 2 − 9)(4ν 2 − 25)3!(8z) 3 + · · · . (B.6b)Gli sviluppi asintoti per J ν (z) e Y ν (z) (per −π < arg z < π) seguono da√2J ν (z) = [P (ν, z) cos χ − Q(ν, z) sin χ] ,πz (B.7a)√2Y ν (z) = [P (ν, z) sin χ + Q(ν, z) cos χ] ,πz (B.7b)dove abbiamo utilizzato (II.49) e (II.50). Per la funzione <strong>di</strong> Bessel immaginariasegue dalla prima equazione (II.51)I ν (z) ∼√ ez ∑ ∞2πzs=0s (ν, s)(−1)(2z) , | arg z| < π s 2 . (B.8)Limitiamoci ai primi termini degli sviluppi asintoti e all’andamento asintoticose z → +∞. Allora arriviamo alle seguenti espressioni asintotiche (ve<strong>di</strong>(II.48), (II.52), (II.53), (II.54), (II.55) e (II.56)):√2J ν (z) ∼(cos(z − 1 2 νπ − 1 )4 π) + O(1 z ) , z → +∞, (B.9a)πz√2Y ν (z) ∼πz√2H ν(1) (z) ∼πz√2H ν(2) (z) ∼πz(sin(z − 1 2 νπ − 1 4 π) + O(1 z ) ), z → +∞, (B.9b)(e i(z− 1 2 νπ− 1 4 π) + O( 1 z ) ), z → +∞, (B.9c)(e −i(z− 1 2 νπ− 1 4 π) + O( 1 z ) ), z → +∞, (B.9d)I ν (z) ∼ √ 1 (e z 1 + O( 1 )2πz z ) , z → +∞, (B.9e)√ πK ν (z) ∼(12z e−z + O( 1 )z ) , z → +∞. (B.9f)166
Appen<strong>di</strong>ce CEQUAZIONE <strong>DI</strong>SCHRÖ<strong>DI</strong>NGERL’equazione <strong>di</strong> Schrö<strong>di</strong>nger descrive (nell’ambito della meccanica quantisticanon relativistica) la probabilità che una particella si trova in una regione dellospazio al momento t. Se m è la massa della particella e h = 2π la costante <strong>di</strong>Planck, si ha per la funzione onda ψ(x, t):i ∂ψ∂t = − 22m ∆ψ + V (x)ψ(x, t), x ∈ R3 , t > 0; (C.1)ψ(x, t = 0) = ψ 0 (x),(C.2)con con<strong>di</strong>zioni al contorno. La funzione V (x) è reale e rappresenta il potenziale.Scegliendo unità fisiche tali che = 1 e 2m = 1, risulta invece della (C.1)i ∂ψ∂t = −∆ψ + V (x)ψ(x, t), x ∈ R3 , t > 0. (C.3)Se E ⊂ R 3 è misurabile, ∫ E |ψ(x, t)|2 dx (sotto la con<strong>di</strong>zione <strong>di</strong> normalizzazioneψ(·, t) ∈ L 2 (R 3 )) è la probabilità <strong>di</strong> trovare la particella in E al momento t.Stu<strong>di</strong>amo esclusivamente il problema stazionario, dove l’energia λ prendeil posto dell’operatore i(∂/∂t), cioè− ∆ψ + V (x)ψ(x) = k 2 ψ(x), x ∈ R 3 , (C.4)dove λ = k 2 con Im k ≥ 0. Ci sono due problemi <strong>di</strong> rilevante importanza:1. il problema degli stati limite: ψ ∈ L 2 (R 3 ). In tal caso l’energia λ = k 2 èun valore <strong>di</strong>screto negativo.2. il problema <strong>di</strong> scattering: in tal caso si impone la con<strong>di</strong>zione <strong>di</strong> Sommerfeld( ) ( )ψ(k, x) = e ikθ·x + eik|x||x| A x 1k, θ, + o , |x| → +∞,|x| |x|167
dove A(k, θ, θ ′ ) è l’ampiezza (come funzione dell’energia λ = k 2 e le<strong>di</strong>rezioni θ, θ ′ ∈ S 2 ); e ikθ·x rappresenta un’onda piana nella <strong>di</strong>rezione θ.Nel problema <strong>di</strong> scattering si ha l’energia λ > 0.Consideriamo il caso <strong>di</strong> simmetria sferica, doveV (x) = V (r),r = |x|.In tal caso l’ampiezza <strong>di</strong>pende da k e dall’angolo tra le <strong>di</strong>rezioni θ e θ ′ :A(k, θ, θ ′ ) = A(k, θ · θ ′ ). Per risolvere il problema <strong>di</strong> scattering bisogno separarele variabili in coor<strong>di</strong>nate cilindriche, dove la <strong>di</strong>rezione <strong>di</strong> θ prende ilposto dall’asse z positivo. Discutiamo ora soltanto il problema degli statilimite. In tal caso si esprime l’equazione <strong>di</strong> Schrö<strong>di</strong>nger in coor<strong>di</strong>nate sferiche:(1r 2 ∂ψ )(1 ∂+sin ϕ ∂ψ )1 ∂ 2 ψ+r 2 ∂r r 2 sin ϕ ∂ϕ ∂ϕ r 2 sin 2 − V (r)ψ = −λψ,ϕ ∂θ2 dove x = (r sin ϕ cos θ, r sin ϕ sin θ, r cos ϕ) ∈ R 3 . Sostituendoψ(x) = R(r)X(ϕ, θ)e moltiplicando da r 2 /R(r)X(ϕ, θ) si ottiene(1 dr 2 dR ) [ (1 1 ∂+sin ϕ ∂X )R(r) dr dr X(ϕ, θ) sin ϕ ∂ϕ ∂ϕ− r 2 V (r) = −λr 2 .+ 1 ]∂ 2 Xsin 2 ϕ ∂θ 2Come al solito, seguono le seguenti equazioni <strong>di</strong>fferenziali:d 2 Rdr + 2 [dR2 r dr + − C ]r + λ − V (r) R(r) = 0; (C.5)(21 ∂sin ϕ ∂X )+ 1 ∂ 2 Xsin ϕ ∂ϕ ∂ϕ sin 2 = −CX(ϕ, θ), (C.6)ϕ ∂θ2 dove C è una costante. L’equazione (C.6) si chiama spesso l’equazione <strong>di</strong>Beltrami.Grazie alle (C1.2) degli appunti sulle funzioni sferiche, esiste una soluzionenon banale della (C.6) se e solo se C = l(l + 1) per qualche l = 0, 1, 2, . . ., e<strong>di</strong>n tal caso X(ϕ, θ) è una combinazione lineare delle funzioni sferiche Ylm (ϕ, θ),dove m = −l, . . . , l. Infatti, eseguendo un’ulteriore separazione delle variabilinella (C.6), X(ϕ, θ) = P(ξ)Θ(θ) dove ξ = cos ϕ e Θ(θ + 2π) ≡ Θ(θ), risultano{costante, m = 0Θ(θ) =c 1 cos mθ + c 2 sin mθ, m = 1, 2, 3, . . . ;168
(d(1 − ξ 2 ) dP )]+[l(l + 1) − m2P(ξ).dξ dξ1 − ξ 2(C.7)La (C.7) si <strong>di</strong>ce equazione <strong>di</strong>fferenziale per le funzioni <strong>di</strong> Legendre associate:P(ξ) ∼ Pl m (ξ), dove l = m, m + 1, m + 2, . . . e m = 0, 1, 2, . . ..Discutiamo ora la (C.5). Sostituendo R(r) = r α S(r) nella (C.5) [con C =l(l + 1)] per un’opportuna α (da stabilire successivamente) e <strong>di</strong>videndo da r α ,si trovad 2 Sdr2(α + 1)+2r[ ]dS α(α + 1) − l(l + 1)dr + + λ − V (r) S(r) = 0.r 2(C.8)Per far somigliare la (C.8) all’equazione <strong>di</strong> Bessel si scelga α tale che 2(α+1) =1, cioè α = −1/2:d 2 Sdr + 1 [dS2 r dr + − (l + 1 ]2 )2+ λ − V (r) S(r) = 0. (C.9)r 2Per far sparire il termine con la derivata prima dalla (C.8), ci vuole α = −1.Quin<strong>di</strong> per S(r) = rR(r) abbiamo[ ]d 2 S −l(l + 1)dr + + λ − V (r) S(r) = 0.(C.10)2 r 2Per α = 0 otteniamo dalla (C.8)d 2 Rdr + 2 []dR2 r dr + l(l + 1)− + λ − V (r) R(r) = 0,r 2(C.11)dove l = 0, 1, 2, · · · . Imporremo le seguenti due con<strong>di</strong>zioni al contorno:⎧⎨R(r) ∫= O(r l ), r → 0 +∞⎩ r|R(r)| 2 (C.12)dr < +∞.I seguenti casi sono <strong>di</strong> rilevante interesse:1. La buca <strong>di</strong> potenziale, dove0V (r) ={−V 0 , 0 ≤ r < r 0 ,0, r > r 0 .2. L’oscillatore armonico, dove V (r) = (γ/2)r 2 per una costante γ > 0.3. L’atomo <strong>di</strong> idrogeno, dove V (r) = −e 2 /r per e la carica dell’elettrone.169
L’equazione (C.5) può essere risolta esattamente in tutti e tre casi.Consideriamo ora il problema <strong>di</strong> scattering dove l’energia E = k 2 è positiva.In tal caso la funzione onda ψ(k, x) non appartiene a L 2 (R 3 ) e infatti sod<strong>di</strong>sfaalla con<strong>di</strong>zione <strong>di</strong> Sommerfeldψ(k, x) = e ikθ·x + ψ s (x)( ) ( )= e ikθ·x + eik|x||x| A x 1k, θ, + o , |x| → +∞,|x| |x|dove A(k, θ, θ ′ ) è l’ampiezza e k > 0. Ovviamente il potenziale V (x) deveessere localmente sommabile (cioè, V ∈ L 1 loc(R 3 ) e tendere a zero abbastanzarapidamente se |x| → ∞. 1 Cercando la cosiddetta funzione <strong>di</strong> Green G(k; x, x ′ )tale che(∆ + k 2 )G(k; x, x ′ ) = −4πδ(x − x ′ ),cioè scegliendo [Ve<strong>di</strong> la (V.67) per n = 3]si ottiene facilmenteψ s (x) = − 14πG(k; x, x ′ ) = eik|x−x′ ||x − x ′ | ,∫G(k; x, x ′ )V (x ′ )ψ(x ′ ) dx ′ .Quin<strong>di</strong>ψ(x) = e ikθ·x − 1 ∫G(k; x, x ′ )V (x ′ )ψ(x ′ ) dx ′ .4πPer calcolare ψ dal potenziale si può risolvere l’equazione precedente per iterazione.Facendo una singola iterazione si arriva alla cosiddetta approssimazione<strong>di</strong> Bornψ(x) ≃ e ikθ·x − 14π∫G(k; x, x ′ )V (x ′ )e ikθ·x′ dx ′ .Discutiamo ora il problema <strong>di</strong> scattering per i potenziali ra<strong>di</strong>ali V (x) =V (r) con r = |x| (Ve<strong>di</strong> [10]). Allora per V ≡ 0 l’equazione <strong>di</strong> Schrö<strong>di</strong>nger perE = k 2 con k > 0 ha la soluzione generaleψ(x) = cost. 1 f l (kr) + cost. 2 g l (kr),dove√ πρf l (ρ) =2 J l+ 1 (ρ) = ρj l (ρ),2g l (ρ) = (−1) l √ πρ2 J −(l+ 1 2 )(ρ) = −ρn l(ρ),1 I potenziali <strong>di</strong> Coulomb V (x) = cost.|x|non conducono ad una teoria <strong>di</strong> scatteringquantistica tanto semplice, poichè non decadono abbastanza rapidamente.170
dove l = 0, 1, 2, . . . e j l e n l si chiamano funzioni <strong>di</strong> Bessel sferiche <strong>di</strong> prima eseconda specie. Sviluppando l’onda pianasi trova per l’ampiezzae ikθ·x =∞∑ l∑l=0 m=−lc l,mf l (kr)krY lm (θ, ϕ),f(k; θ · θ ′ ) def= A(k, θ, θ ′ ) = 1 k∞∑(2l + 1)e iδl(k) sin δ l (k)P l (θ · θ ′ ),l=0dove δ l (k) si chiamano fasi <strong>di</strong> scattering.1 La buca <strong>di</strong> potenzialeIn tal casoV (r) ={−V 0 , 0 ≤ r < r 0 ,0, r > r 0 ,(C.13)dove V 0 > 0. Sostituendo R(r) = r −1/2 S(r) otteniamo [Ve<strong>di</strong> (C.9)]d 2 Sdr + 1 [dS2 r dr + V 0 − κ 2 − (l + 1 ]2 )2S(r) = 0, 0 < r < rr 2 0 ,d 2 Sdr + 1 [dS2 r dr − κ 2 + (l + 1 ]2 )2S(r) = 0, r > rr 2 0 , (C.14)dove λ = −κ 2 per κ > 0. Ovviamente, per r > r 0 la (C.14) è l’equazioneimmaginaria <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne l + 1 nella variabile κr. Siccome deve tendere2a zero se r → ∞, si trovaS(r) ∼ K l+1 (κr), r > r 0 , (C.15)2dove K ν (z) è la funzione <strong>di</strong> MacDonald <strong>di</strong> or<strong>di</strong>ne ν. Per ν, z > 0 la funzione<strong>di</strong> MacDonald K ν (z) è decrescente.Per 0 < r < r 0 la situazione è più complicata. Siccome S(0 + ) esiste, risultaper 0 < r < r 0⎧⎪⎨ J l+1 (r √ V 0 − κ 2 ), V 0 > κ 2 ,2S(r) ∼ r l+ 1 2 , V 0 = κ 2 ,(C.16)⎪⎩I l+12(r √ κ 2 − V 0 ), V 0 < κ 2 ,dove J ν (z) è la funzione <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne ν e I ν (z) è la funzione <strong>di</strong> Besselimaginaria <strong>di</strong> or<strong>di</strong>ne ν.171
Per trovare i stati limite richie<strong>di</strong>amo che la derivata logaritmica della S(cioè, S ′ /S) sia continua in r = r 0 . Grazie al deca<strong>di</strong>mento della funzione <strong>di</strong>MacDonald, si vede subito che S ′ (r)/S(r) ha un limite negativo se r → (r 0 ) + .D’altra parte, r l+ 1 2 e la funzione <strong>di</strong> Bessel immaginaria sono crescenti per r > 0,mentre la funzione <strong>di</strong> Bessel stessa è oscillatoria. Quin<strong>di</strong> gli stati limiti possonoesistere soltanto per V 0 > κ 2 . In tal casodoveK ′ (κrl+κr 1 0 )20K l+12S(r) ∼ J l+1 (r √ V 0 − κ 2 ), (C.17)2√(κr 0 ) = r √ J ′ (r0 V0 − κ 2 l+ 1 0 V0 − κ 2 )2√J l+1 (r 0 V0 − κ 2 ) . (C.18)2Le energie λ = −κ 2 corrispondenti agli stati limite si trovano dal numero finito<strong>di</strong> zeri della (C.18) per 0 < κ < √ V 0 ; ci sono zeri per soltanto un numero finito<strong>di</strong> l = 0, 1, 2, . . ..Per l = 0 abbiamoK 12√ π(z) =2z e−z , J 1 (w) =2Allora (C.18) si riduce all’identitàtan( √ V 0 r 2 0 − z 2 )√V0 r 2 0 − z 2 = − 11 + z ,√ π2w sin(w).dove z = κr 0 . Gli zeri z = κr 0 ∈ (0, r 0√V0 ) si ottengono graficamente.Per l = 0 si può ottenere i risultati in modo più semplice senza utilizzarele funzioni <strong>di</strong> Bessel. Partendo dall’equazione <strong>di</strong> Schrö<strong>di</strong>nger (C.10) per V (r)in (C.13), otteniamo per S(r) = rR(r){S ′′ (r) + (V 0 − κ 2 )S(r) = 0, 0 < r < r 0 ,S ′′ − κ 2 S(r) = 0, r > r 0 ,(C.19)dove ∫ ∞|S(r)| 2 dr < ∞, S(0) = 0 2 e S è <strong>di</strong> classe C 1 in r = r0 0 . Per r > r 0risulta S(r) ∼ e −κr . Quin<strong>di</strong> ci vuole (S ′ /S)(r 0 ) = −κ < 0.Se 0 ≤ V 0 < κ 2 , per 0 < r < r 0 risulta S(r) ∼ sinh(r √ κ 2 − V 0 ) [graziealla con<strong>di</strong>zione S(0) = 0] per 0 < r < r 0 e quin<strong>di</strong> è impossibile avere(S ′ /S)(r 0 ) < 0. Per κ = √ V 0 risulta S(r) ∼ r [grazie alla con<strong>di</strong>zione S(0) = 0]2 Una con<strong>di</strong>zione tecnica mai spiegata dal punto <strong>di</strong> vista fisico per costringere ad unasuccessione finita <strong>di</strong> autovalori.172
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5543210−1−2−3−41086420−2−4−6−8−5−100 1 2 3 4 5 6 7 8 9 10Figura C.1: Per l = 0 e per r 0√V0 = 5 (pannello sinistro) o 10 (pannellodestro) vengono calcolati graficamente i valori <strong>di</strong> z = κr 0 per cuil’equazione <strong>di</strong> Schrö<strong>di</strong>nger per la buca sferica ha stato limite.e quin<strong>di</strong> (S ′ /S)(r 0 ) = (1/r 0 ) > 0. Di conseguenza, siamo costretti a limitarcial caso 0 < κ < √ V 0 . In tal caso la con<strong>di</strong>zione S(0) = 0 conducea S(r) ∼ sin(r √ V 0 − κ 2 ) per 0 < r < r 0 . Dalla con<strong>di</strong>zione <strong>di</strong> derivabilitàcontinua in r = r 0 si trova√V0 − κ 2 cos(r 0√V0 − κ 2 )sin(r 0√V0 − κ 2 ) = −κ.Per stu<strong>di</strong>are quest’ultima equazione, poniamo ξ = r 0√V0 − κ 2 (che appartieneall’intervallo (0, r 0√V0 ) e scriviamo l’equazione nella forma√ξtan(ξ) = − √V 0 r0 2 − ξ 2 , 0 < ξ < r 0 V0 ,oppureξtan(ξ) = −√ V0 r0 2 − ξ , 0 < ξ < r 0√V0 .2Per n = 1, 2, 3, . . . e (n − 1)π < r 2 0√V0 ≤ (n + 1 )π ci sono n soluzioni ξ <strong>di</strong>2quest’equazione e quin<strong>di</strong> n stati limite.173
2 Oscillatore armonicoa. Utilizzando le coor<strong>di</strong>nate sferiche. In tal casoV (r) = 1 2 γr2 ,(C.20)dove γ > 0 è una costante. Ponendo c = √ γ/8 e R(r) = e −cr2 φ(r), la (C.11)si riduce all’equazione <strong>di</strong>fferenziale( ) ()2φ ′′ (r) +r − 4cr φ ′ (r) + k 2 l(l + 1)− 6c − φ(r) = 0. (C.21)r 2Sostituendo la serie <strong>di</strong> potenzeφ(r) = r α∞∑s=0c s r s ,dove α è un parametro da stabilire, troviamo∞∑[{(α + s)(α + s − 1) + 2(α + s) − l(l + 1)}c ss=0+ {(k 2 − 6c) − 4c(α + s − 2)}c s−2]r α+s−2 = 0,(C.22)dove c −1 = c −2 = 0. Supponendo che il coefficiente <strong>di</strong> r α−2 sia <strong>di</strong>verso da zero,si trovaα(α − 1) + 2α − l(l + 1) = 0,e quin<strong>di</strong> α = l oppure α = −(l + 1). La con<strong>di</strong>zione al contorno (C.12) ser → 0 + implica che α = l. In tal caso c 1 = 0 es(s + 2l + 1)c s + {(k 2 − 6c) − 4c(s + l − 2)}c s−2 = 0.Dunque c 1 = c 3 = c 5 = · · · = 0 ec s = 4c(s + l − 2) − (k2 − 6c)c s−2 ,s(s + 2l + 1)(C.23)dove s = 2, 4, 6, · · · . Il rapporto c s r 2 /c s−2 ∼ (4cr 2 /s) se s → +∞. Quin<strong>di</strong>scegliamo k 2 tale che c s = 0 per qualche s = 2, 4, 6, · · · , cioèk 2 = 4c(s + l − 2) + 6c, s = 2, 4, 6, · · · .Quin<strong>di</strong> abbiamo trovato gli autovalori e le autofunzioni{kl,n 2 = 2c(2n + 3), l = n, n − 2, n − 4, . . . , l = 0, 1, 2, · · · ,ψ l,n (r, θ, ϕ)=e −cr2 φ l,n (r)Yl m (θ, ϕ), m = −l, −l + 1, · · · , l,(C.24)174
dove φ l,n (r) = r l v l,n (r) e v l,n (r) è un polinomio in r 2 <strong>di</strong> grado n − l. Quelpolinomio sod<strong>di</strong>sfa l’equazioner 2 v ′′ (r) + 2r(l + 1 − 2cr 2 )v ′ (r) + 4c(n − l)r 2 v(r) = 0.Ponendo t = 2cr 2 e w(t) = v(r) [tali che rv ′ (r) = 2tw ′ (t) e r 2 v ′′ (r) = 4t 2 w ′′ (t)+2tw ′ (t)] otteniamo l’equazione <strong>di</strong>fferenzialetw ′′ (t) + (l + 3 2 − t)w′ (t) + 1 (n − l)w(t) = 0,2 (C.25)dove n − l = 0, 2, 4, . . . e w(t) è un polinomio in t <strong>di</strong> grado 1 (n − l).2b. Utilizzando le coor<strong>di</strong>nate cartesiane. Siccome V (r) = γ 2 r2 =γ2 (x2 + y 2 + z 2 ), l’equazione <strong>di</strong> Schrö<strong>di</strong>nger è anche separabile in coor<strong>di</strong>nateCartesiane. Infatti, scrivendo ψ(x, y, z) = X(x)Y (y)Z(z) otteniamo le treequazioni ( )X⎧⎪ ′′ (x) + kx 2 − γx2 X(x) = 0,2⎨ )(ky 2 − γy2⎪ ⎩Y ′′ (y) +Z ′′ (z) +2 (kz 2 − γz22Y (y) = 0,)Z(z) = 0,(C.26)dove k 2 = kx 2 + ky 2 + kz. 2 Stu<strong>di</strong>amo ora una delle equazioni in una variabile.Ponendo X(x) = e −cx2 φ(x) per c = √ γ/8, l’equazione X ′′ (x) + [kx 2 −(γx 2 /2)]X(x) = 0 si riduce all’equazioneφ ′′ (x) − 4cxφ ′ (x) + (k 2 x − 2c)φ(x) = 0.(C.27)Sostituendo φ(x) = x α ∑ ∞s=0 c sx s , otteniamo∞∑ [ ](α + s)(α + s − 1)cs + {(kx 2 − 2c) − 4c(α + s − 2)}c s−2 x α+s−2 = 0,s=0(C.28)dove c −1 = c −2 = 0. Scegliendo α = 0, troviamo c 1 = c 3 = c 5 = · · · = 0 ec s= 4c(s − 2) − (k2 x − 2c)c s−2 s(s − 1), s = 2, 4, 6, · · · ,risultando in polinomi in x <strong>di</strong> grado n = 0, 2, 4, · · · se k 2 x = 2c(2n + 1).Scegliendo α = 1, troviamo c 1 = c 3 = c 5 = · · · = 0 ec s= 4c(s − 1) − (k2 x − 2c), s = 2, 4, 6, · · · ,c s−2 s(s + 1)175
isultando in polinomi in x <strong>di</strong> grado n = 1, 3, 5, · · · se kx 2 = 2c(2n+1). Insiemetroviamo le seguenti soluzioni X n (x) = φ n (x)e −cx2 , dove φ n (x) è un polinomio<strong>di</strong> grado n = 0, 1, 2, 3, 4, · · · e kx 2 = 2c(2n + 1). Raccogliendo X, Y e Z risulta{k 2 = 2c(2n + 3), n = 0, 1, 2, 3, · · · ,ψ(x, y, z) = e −c(x2 +y 2 +z 2) (C.29)φ n1 (x)φ n2 (y)φ n3 (z),dove n = n 1 + n 2 + n 3 .c. Analisi dei polinomi. Sostituendo z = x √ 2c e v(z) = φ(x) si arrivaall’equazione <strong>di</strong>fferenziale <strong>di</strong> Hermite (II.86). Quin<strong>di</strong> i polinomi φ n (x) nella(C.29) sono proporzionali a H n (x √ 2c), dove H n è il polinomio <strong>di</strong> Hermite <strong>di</strong>grado n. Vale la relazione d’ortogonalità [ve<strong>di</strong> la (II.88)]∫ ∞−∞H n (x √ 2c)H m (x √ 2c)e −2cx2 dx = 2n (n!) √ π√2cδ n,m ,dove δ n,m è la delta <strong>di</strong> Kronecker.I polinomi w m (t) (m = n − l = 0, 1, 2, . . .) sod<strong>di</strong>sfano l’equazione <strong>di</strong>fferenzialetw ′′ m(t) + (l + 3 2 − t)w′ m(t) + mw m (t) = 0.Quest’ultima equazione coincide con l’equazione <strong>di</strong>fferenziale <strong>di</strong> Laguerre perα = l + 1 [ve<strong>di</strong> la (II.96)]. Quin<strong>di</strong> w 2 m(t) è proporzionale al polinomio <strong>di</strong>Laguerre L (l+ 1 2 )m (t). In altre parole,φ l,n (r) = cost.r l L (l+ 1 2 )n−l(2cr 2 ).Calcoliamo ora il numero N n <strong>di</strong> autofunzioni linearmente in<strong>di</strong>pendenti corrispondentiallo stesso livello <strong>di</strong> energia, cioè allo stesso intero n = 0, 1, 2, . . ..Dalla derivazione in coor<strong>di</strong>nate cartesiane segue che N n è uguale al numero <strong>di</strong>punti (n 1 , n 2 , n 3 ) con coor<strong>di</strong>nate intere non negative per cui n 1 + n 2 + n 3 = n.Dalla derivazione in coor<strong>di</strong>nate sferiche segue che⎧#{(n ⎪⎨ 1 , n 2 , n 3 ) ∈ Z + : n 1 + n 2 + n 3 = n} = 1 (n + 1)(n + 2),2∑N n = (2l + 1) = 1 (n + 1)(n + 2),2⎪⎩l=0,1,...,nn−l paridove ci ren<strong>di</strong>amo conto del fatto che ad ogni l = 0, 1, 2, 3, . . . corrispondono2l + 1 autofunzioni linearmente in<strong>di</strong>pendenti (corrispondenti ai valori <strong>di</strong> m =−l, −l + 1, . . . , l) con lo stesso livello <strong>di</strong> energia.176
3 Atomo d’idrogenoIn tal caso V (r) = −e 2 /r, dove e è la carica dell’elettrone. Ponendo λ =−κ 2 per κ > 0 (cioè, richiedendo che l’energia sia negativa), l’equazione <strong>di</strong>Schrö<strong>di</strong>nger (C.10) ha la seguente forma:S ′′ (r) +(−κ 2 + e2r)l(l + 1)− S(r) = 0,r 2(C.30)dove l = 0, 1, 2, · · · . Sostituendo S(r) = e −κr w(r) otteniamo( ew ′′ (r) − 2κw ′ 2(r) +r)l(l + 1)− w(r) = 0.r 2(C.31)Sostituendo ora w(r) = r α ∑ ∞s=0 c sr s si ottiene∞∑ [ ]{(α + s)(α + s − 1) − l(l + 1)}cs +{e 2 − 2κ(α + s − 1)}c s−1 r α+s−2 = 0.s=0(C.32)Osserviamo che il termine costante nella (C.32) coincide con (α−l−1)(α+l)c 0 .Scegliendo α = l + 1 (escludendo α = −l) otteniamoc sc s−1=2κ(s + l) − e2, s = 1, 2, 3, · · · . (C.33)s(s + 2l + 1)Per produrre soluzioni polinomiali richie<strong>di</strong>amo che κ = (e 2 /2n) per n =l + 1, l + 2, · · · . 3 In tal caso risulta c n−l = c n+1−l = · · · = 0; dunque w(r) =r l+1 v(r), dove v(r) è un polinomio in r <strong>di</strong> grado n − l − 1. In altre parole,⎧⎨κ 2 n = − e4, n = l + 1, l + 2, · · · ,4n2 ⎩ψ(r, θ, ϕ) = r l+1 e −e2r/2n v l,n−l−1 (r)Yl m (θ, ϕ), m = −l, −l + 1, · · · , l.(C.34)Ponendo w(r) = r l+1 v(r), t = 2κr, e 2 = 2κn e ṽ(t) = v(r), otteniamot ṽ ′′ (t) + (2l + 2 − t)ṽ ′ (t) + (n − l − 1)ṽ(t) = 0.(C.35)Sostituendo x ↦→ t, α ↦→ 2l + 1 e n ↦→ n − l − 1 nell’equazione <strong>di</strong>fferenziale<strong>di</strong> Laguerre si arriva alla (C.35). Dunque ṽ(t) è proporzionale a L (2l+1)n−l−1(t). In3 Si pone n = s + l, dove s = 1, 2, . . . e l = 0, 1, 2, . . .. Quin<strong>di</strong> n = 1, 2, 3, . . . e l =0, 1, . . . , n − 1.177
altre parole,⎧⎪⎨ E n = −κ 2 n = − e4, n = l + 1, l + 2, · · · ,4n2 ( )⎪⎩ ψ(r, θ, ϕ)=cost.r l+1 e −e2r/2n L (2l+1) e 2 rn−l−1Yl m (θ, ϕ), m = −l, −l + 1, · · · , l,n(C.36)dove n = 1, 2, 3, . . ., l = 0, 1, . . . , n − 1 e m = −l, −l + 1, . . . , l.Osserviamo che le energie E n = −(e 2 /2n 2 ) degli stati limite dell’idrogenovengono determinate dall’intero n ∈ N. Ad ogni n ∈ N corrispondono n − 1valori <strong>di</strong> l (l = 0, 1, . . . , n−1) e ad ogni tale l 2l+1 valori <strong>di</strong> m (m = −l, . . . , l).Quin<strong>di</strong> ad ogni n ∈ N corrispondono1 + 3 + 5 + 7 + · · · + (2n − 1) = n 2valori <strong>di</strong> (l, m) (l, m ∈ Z, |m| ≤ l < n). In altre parole, per E = −e 4 /4n 2l’equazione <strong>di</strong> Schrö<strong>di</strong>nger con potenziale V (r) = −(e 2 /r) ha n 2 soluzionilinearmente in<strong>di</strong>pendenti in L 2 (R 3 ).178
Appen<strong>di</strong>ce DTRASFORMATA <strong>DI</strong> FOURIER1 Trasformata <strong>di</strong> Fourier negli spazi L 1 e L 2 .Sia f : R n → C una funzione sommabile. Allora l’integrale (<strong>di</strong> Lebesgue)∫ˆf(ξ) def= F [f](ξ) = f(x)e −i(ξ,x) dx, ξ ∈ R n ,è assolutamente convergente e | ˆf(ξ)| ≤ ‖f‖ 1 , dove ‖f‖ 1 = ∫ |f(x)| dx è lanorma L 1 <strong>di</strong> f. In tal caso si definisce una funzioneξˆf↦→ F [f](ξ)su R n che si chiama la trasformata <strong>di</strong> Fourier della f. Dal teorema dellaconvergenza dominata 1 segue che F [f](ξ) è continua in ξ ∈ R n .Proposizione D.1 Sia f ∈ L 1 (R n ). Allora F [f](ξ) è continua in ξ ∈ R n etende a zero se |ξ| → +∞. 2Dimostrazione. La continuità <strong>di</strong> F [f](ξ) al variare <strong>di</strong> ξ segue dal teoremadella convergenza dominata (infatti, dal Lemma 6.9.1 in [6], Vol. 2). La secondaparte segue approssimando (Re f) ± e (Im f) ± da una successione crescente <strong>di</strong>funzioni semplici sommabili e applicando il teorema <strong>di</strong> Beppo-Levi. 3 ✷1 Teorema della convergenza dominata (<strong>di</strong> Lebesgue): Sia {f n } ∞ n=1 una successione <strong>di</strong>funzioni misurabili tali che f n (t) → f(t) per quasi ogni t, |f n (t)| ≤ g(t) per quasi ogni t e∫g(t) dt < +∞. Allora limn→∞∫fn (t) dt = ∫ f(t) dt.2 La seconda parte si chiama il Lemma <strong>di</strong> Riemann-Lebesgue.3 Teorema della convergenza monotona (<strong>di</strong> Beppo-Levi): Sia {f n } ∞ n=1 una successionecrescente <strong>di</strong> funzioni misurabili non negative tali che f n (t) → f(t) per quasi ogni t. Alloralim n→∞∫fn (t) dt = ∫ f(t) dt.179
Siano f, g ∈ L 1 (R n ). Inoltre, siano (·, ·) c il prodotto scalare complesso <strong>di</strong>L 2 (R n ) e (·, ·) quello reale. Allora F [f], F [g] ∈ L ∞ (R n ). In tal caso risulta perf, g ∈ L 1 (R n )∫ [∫](F [f], g) = f(x)e −i(x,ξ) dx g(ξ) dξ∫ [∫]= f(x) g(ξ)e −i(ξ,x) dξ dx = (f, F [g]); (D.1)∫ [∫](F [f], g) c = f(x)e −i(x,ξ) dx g(ξ)dξ∫=[∫f(x)]g(ξ)e i(ξ,x) dξ dx = (f, F [g](−ξ)) c ,(D.2)dove il secondo passaggio è giustificato grazie al teorema <strong>di</strong> Fubini. 4Siano f, g ∈ L 1 (R n ). Allora il teorema <strong>di</strong> Fubini <strong>di</strong>mostra che il prodotto<strong>di</strong> convoluzione∫∫(f ∗ g)(x) = f(y)g(x − y) dy = f(x − y)g(y) dyconduce ad una funzione f ∗ g ∈ L 1 (R n ). Dal teorema <strong>di</strong> Fubini segue chef ∗ g = g ∗ f,(f ∗ g) ∗ h = f ∗ (g ∗ h),dove f, g, h ∈ L 1 (R n ). Applicando la trasformazione z = x − y con y fissato siha∫ (∫)F [f ∗ g](ξ) = f(y)g(x − y) dy e −i(x,ξ) dx∫ (∫)= f(y)e −i(y,ξ) g(z)e −i(z,ξ) dy dz = F [f](ξ)F [g](ξ). (D.3)In altre parole, la trasformata <strong>di</strong> Fourier manda l’algebra L 1 (R n ) dove la moltiplicazioneè il prodotto <strong>di</strong> convoluzione, nell’algebra C(R n ) dove la moltiplicazioneè il prodotto algebrico usuale.Consideriamo ora la trasformata <strong>di</strong> Fourier su L 2 (R n ).Teorema D.2 (<strong>di</strong> Plancherel) Sia f ∈ L 1 (R n ) ∩ L 2 (R n ). Allora∫∫1|F [f](ξ)| 2 dξ = |f(x)| 2 dx.(2π) n(D.4)4 Sia f(t, s) una funzione misurabile <strong>di</strong> due variabili. Supponiamo che almeno uno degliintegrali ripetuti ∫ ( ∫ |f(t, s)| ds)dt e ∫ ( ∫ |f(t, s)| dt)ds sia convergente. Allora si puòscambiare l’or<strong>di</strong>ne <strong>di</strong> integrazione: ∫ ( ∫ f(t, s) ds)dt = ∫ ( ∫ f(t, s) dt)ds.180
Inoltre, F ammette un’estensione lineare ad L 2 (R n ) che sod<strong>di</strong>sfa la (D.4) perogni f ∈ L 2 (R n ) ed è un operatore invertibile su L 2 (R n ).Dimostrazione. Prima <strong>di</strong>amo la <strong>di</strong>mostrazione per n = 1.Sia f una funzione continua e regolare a tratti con supporto in (−π, π).Allora la serie <strong>di</strong> Fourier <strong>di</strong> f converge uniformemente ad f in x ∈ [−π, π](ve<strong>di</strong> [6], Teorema 2.5.2, Vol. 2):f(x) = a 02 + ∞∑n=1= a 02 + ∞∑n=1(a n cos(nx) + b n sen (nx))(an − ib n2e inx + a )n + ib ne −inx =2dove c n = (1/2π) ∫ π−π f(x)e−inx dx = (2π) −1 F [f](−n) e∫ π−π|f(x)| 2 dx = π= 2π(|a 0 | 22∞∑n=−∞+)∞∑(|a n | 2 + |b n | 2 )n=1|c n | 2 = 12π∞∑n=−∞∞∑n=−∞|F [f](−n)| 2 .c n e inx ,Siccome c n [e −ixt f] = (2π) −1 F [f](n + t) per ogni n ∈ Z, t ∈ R e |f(x)| 2 =|e −ixt f(x)| 2 , risulta∫ ∞−∞|f(x)| 2 dx =∫ 1 ∫ ∞0= 12π−∞∞∑n=−∞|f(x)| 2 dxdt∫ 10|F [f](n + t)| 2 dt = 1 ∫ ∞|F [f](ξ)| 2 dξ.2π −∞Se f ha supporto compatto in R, si scelga c > 0 tale che g(x) = c 1/2 f(cx)ha supporto in (−π, π). In tal caso∫ ∞−∞|f(x)| 2 dx =∫ ∞= 12π−∞∫ ∞|g(x)| 2 dx−∞|F [g](ξ)| 2 dξ = 12π∫ ∞−∞|F [f](ξ)| 2 dξ.Se f ∈ L 1 (R)∩L 2 (R), approssimiamo f da funzioni continue e regolari a tratticon supporto compatto e troviamo la stessa relazione.181
L’equazione (D.4) <strong>di</strong>mostra che F può essere estesa ad un operatore lineareF da L 2 (R) in L 2 (R) che sod<strong>di</strong>sfa (D.4). Infine, siccome F manda il sottospaziodenso L 1 (R) ∩ L 2 (R) <strong>di</strong> L 2 (R) nel sottospazio denso C(R) ∩ L 2 (R) <strong>di</strong> L 2 (R) el’immagine <strong>di</strong> F è chiuso, F è un operatore invertibile su L 2 (R).La generalizzazione ad n ∈ N segue applicando n trasformazioni <strong>di</strong> Fourieruni<strong>di</strong>mensionali in seguito.✷Corollario D.3 Sia f ∈ L 2 (R n ). Allora l’operatore inverso ha la formaF −1 [f](ξ) = 1(2π) F [f](−ξ) = 1 ∫f(x)e i(x,ξ) dx. (D.5)n (2π) nDimostrazione. Si ricor<strong>di</strong> che (·, ·) c è il prodotto scalare complesso inL 2 (R n ). Allora per f, g ∈ L 1 (R n ) ∩ L 2 (R n ) segue(F [f], g) c = (F [f], g) = (f, F [g]) = (f, F [g](−ξ)) c ,e questa relazione si generalizza per f, g ∈ L 2 (R n ). Dalla (D.4) segue che(f, g) c = (2π) −n (F [f], F [g]) c = (2π) −n (f, F [F [g]](−ξ)) c ,dove f, g ∈ L 2 (R n ). Siccome f, g sono arbitrarie, è valida la (D.5).Dal Corollario D.3 si vede subito che (2π) −n/2 F è un operatore lineare unitariosullo spazio <strong>di</strong> Hilbert complesso L 2 (R n ). L’applicazione dell’operatorelineare (2π) −n/2 F ad una funzione f ∈ L 2 (R n ) non ne cambia la norma L 2 .2 Funzioni Generalizzate <strong>di</strong> Crescita LentaUno dei meto<strong>di</strong> più efficaci <strong>di</strong> risoluzione dei problemi della fisica matematicaè il metodo delle trasformate <strong>di</strong> Fourier. Nel prossimo paragrafo sarà espostala teoria della trasformata <strong>di</strong> Fourier per le cosidette funzioni generalizzate<strong>di</strong> crescita lenta (<strong>di</strong>stribuzioni rinvenute). Per questa ragione bisogna primastu<strong>di</strong>are la classe delle funzioni generalizzate <strong>di</strong> crescita lenta.Riportiamo nell’insieme delle funzioni fondamentali S = S(R n ) tutte lefunzioni della classe C ∞ (R n ) decrescenti, per |x| → +∞, con tutte le derivatepiù rapidamente <strong>di</strong> ogni potenza non negativa <strong>di</strong> 1/|x|. Definiamo la convergenzain S come segue: la successione delle funzioni ϕ 1 , ϕ 2 , · · · , da S convergead una funzione ϕ ∈ S, cioè ϕ k → ϕ per k → ∞ in S, se, per tutti i valori deimoltiin<strong>di</strong>ci 5 α e β, si halim sup∣ x β D α ϕ k (x) − x β D α ϕ(x) ∣ = 0.k→∞ x∈R n5 Se x = (x 1 , · · · , x n ) ∈ R n , α = (α 1 , · · · , α n ) ∈ (N ∪ {0}) n e β = (β 1 , · · · , β n ) ∈(N ∪ {0}) n , allora x β = x β11 · · · xβn n e D α ϕ(x) = Dx α11Dx α22 · · · Dx αnnϕ(x). Secondo il teorema <strong>di</strong>Schwartz, l’or<strong>di</strong>ne <strong>di</strong> derivazione parziale non importa. Inoltre, |α| = α 1 + · · · + α n .182✷
Le operazioni <strong>di</strong> derivazione D β ϕ(x) e <strong>di</strong> sostituzione lineare non singolare<strong>di</strong> variabili ϕ(Ay + b) (dove det A ≠ 0) sono continue da S in S. Questo segue<strong>di</strong>rettamente dalla definizione <strong>di</strong> convergenza nello spazio S.D’altro canto, la moltiplicazione per una funzione infinitamente derivabilepuò far uscire all’esterno dell’insieme S, per esempio e −|x|2 e |x|2 = 1 /∈ S.Si <strong>di</strong>ce funzione generalizzata <strong>di</strong> crescita lenta ogni funzionale lineare continuosullo spazio S delle funzioni fondamentali. Denotiamo S ′ = S ′ (R n )l’insieme <strong>di</strong> tutte le funzioni generalizzate <strong>di</strong> crescita lenta. È evidente che S′è un insieme lineare. Definiamo come debole la convergenza <strong>di</strong> una successione<strong>di</strong> funzionali: una successione <strong>di</strong> funzioni generalizzate f 1 , f 2 , · · · , appartenentia S ′ , converge ad una funzione generalizzata f ∈ S ′ , cioè f k → f per k → ∞ inS ′ se, per qualunque ϕ ∈ S si ha (f k , ϕ) → (f, ϕ) per k → ∞. L’insieme lineareS ′ dotato <strong>di</strong> convergenza debole è detto spazio S ′ delle funzioni generalizzate<strong>di</strong> crescita lenta.Esempi <strong>di</strong> funzioni generalizzate <strong>di</strong> crescita lenta:(a) Se f(x) è una funzione localmente sommabile <strong>di</strong> crescita lenta all’infinito,cioè per un certo m ≥ 0,∫|f(x)|(1 + |x|) −m dx < +∞,questa funzione definisce un funzionale regolare f appartenente a S ′ inconformità con la regola∫(f, ϕ) = f(x)ϕ(x) dx, ϕ ∈ S.Ma non tutte le funzioni localmente sommabili definiscono una funzionegeneralizzata <strong>di</strong> crescita lenta, per esempio, e x /∈ S ′ (R). D’altro canto,non tutte le funzioni localmente sommabili appartenenti a S ′ sono <strong>di</strong>crescita lenta. Per esempio, la funzione (cos e x ) ′ = −e x sen e x non è <strong>di</strong>crescita lenta, eppure definisce una funzione generalizzata da S ′ me<strong>di</strong>antela formula∫((cos e x ) ′ , ϕ) = − (cos e x )ϕ ′ (x) dx, ϕ ∈ S.(b) La funzione Delta <strong>di</strong> Dirac è il funzionale linearef δ↦→ f(0), f ∈ S.(c) La derivata D α δ della funzione Delta <strong>di</strong> Dirac appartiene a S ′ . Infatti,il terzo membro dell’uguaglianza(D α δ, ϕ) = (−1) |α| (δ, D α ϕ) = (−1) |α| [D α ϕ](0)è un funzionale lineare continuo su S.183
(d) Se f ∈ S ′ , allora ogni derivata D α f ∈ S ′ . Infatti, visto che l’operazione<strong>di</strong> derivazione D α ϕ è continua da S in S, il secondo membrodell’uguaglianza(D α f, ϕ) = (−1) |α| (f, D α ϕ), ϕ ∈ S,è un funzionale lineare continuo su S.(e) Sia n = 1. Allora la funzione <strong>di</strong> Heaviside H, H(x) = 1 per x > 0 eH(x) = 0 per x < 0, induce il funzionale linearef H↦→∫ ∞In tal caso, per f ∈ S ′ e ϕ ∈ S risulta(H ′ , ϕ) = −(H, ϕ) = −Di conseguenza, H ′ = δ in S ′ .0f(x) dx, f ∈ S.∫ ∞3 Trasformata <strong>di</strong> Fourier in S ′0ϕ ′ (x) dx = ϕ(0) = (δ, ϕ).La proprietà rimarchevole della classe delle funzioni generalizzate <strong>di</strong> crescitalenta consiste nel fatto che l’operazione <strong>di</strong> trasformazione <strong>di</strong> Fourier non portafuori dai limiti <strong>di</strong> questa classe.Visto che le funzioni fondamentali appartenenti a S sono sommabili in R n ,su queste funzioni è definita l’operazione F <strong>di</strong> trasformazione <strong>di</strong> Fourier∫F [ϕ](ξ) = ϕ(x)e −i(ξ,x) dx, ϕ ∈ S.In questo caso la funzione F [ϕ](ξ) la quale rappresenta la trasformata <strong>di</strong> Fourierdella funzione ϕ, è limitata e continua in R n . La funzione fondamentaleϕ decresce all’infinito più rapidamente <strong>di</strong> qualunque potenza positiva <strong>di</strong>1/|x| e perciò la sua trasformata <strong>di</strong> Fourier può essere derivata sotto il segnod’integrale un numero <strong>di</strong> volte arbitrario:∫D α F [ϕ](ξ) = (−ix) α ϕ(x)e −i(ξ,x) dx = F [(−ix) α ϕ](ξ), (D.6)da cui segue che F [ϕ] ∈ C ∞ (R n ). Inoltre, possiede le stesse proprietà ogniderivata D α ϕ e quin<strong>di</strong>∫ (DF [D β ϕ](ξ) =β ϕ(x) ) ∫e −i(ξ,x) dx = (−1) |β| ϕ(x)D ( β e −i(ξ,x)) dx= (−1) |β| (−iξ) β F [ϕ](ξ) = (iξ) β F [ϕ](ξ). (D.7)184
Infine, dalle formule (D.6) e (D.7) si ottieneξ β D α F [ϕ](ξ) = ξ β F [(−ix) α ϕ](ξ) = (−i) |α|+|β| F [D β (x α ϕ)](ξ).(D.8)Dall’uguaglianza (D.8) segue che per tutti gli α, β i valori <strong>di</strong> ξ β D α F [ϕ](ξ)sono uniformemente limitati rispetto a ξ ∈ R n :∫|ξ β D α F [ϕ](ξ)| ≤ |D β (x α ϕ)| dx. (D.9)Ciò vuol <strong>di</strong>re che F [ϕ] ∈ S. Dunque, la trasformata <strong>di</strong> Fourier trasforma lospazio S in se stesso.Visto che la trasformata <strong>di</strong> Fourier F [ϕ] <strong>di</strong> una funzione ϕ appartenente aS è una funzione sommabile e continuamente derivabile su R n , allora, siccomeϕ ∈ L 2 (R n ), la funzione ϕ è espressa in termini della sua trasformata <strong>di</strong> FourierF [ϕ] me<strong>di</strong>ante l’operazione <strong>di</strong> trasformazione inversa <strong>di</strong> Fourier F −1 :doveF −1 [ψ](x) = 1(2π) n ∫= 1(2π) n ∫ϕ = F −1 [F [ϕ]] = F [F −1 [ϕ]],ψ(ξ)e i(ξ,x) dξ = 1(2π) n F [ψ](−x)ψ(−ξ)e −i(ξ,x) dξ = 1(2π) n F [ψ(−ξ)](x).(D.10)(D.11)Dalle formule (D.10) e (D.11) deriva che ogni funzione ϕ appartenente a Sè la trasformata <strong>di</strong> Fourier della funzione ψ = F −1 [ϕ] appartenente a S, conϕ = F [ψ], e se F [ϕ] = 0, anche ϕ = 0. 6 Ciò vuol <strong>di</strong>re che la trasformazione <strong>di</strong>Fourier F trasforma S in S ed inoltre in modo univoco.Lemma D.4 La trasformazione <strong>di</strong> Fourier F è continua da S in S.Dimostrazione. Supponiamo che ϕ k → 0 per k → +∞ in S. Allora,applicando la (D.9) alle funzioni ϕ k , si ottiene per tutti gli α e β∫|ξ β D α F [ϕ k ](ξ)| ≤ |D β (x α ϕ k )| dx∫≤ sup |D β (x α ϕ k )|(1 + |x|) n+1 dyx∈R n (1 + |y|) , n+1da cui segue chelim sup |ξ β D α F [ϕ k ](ξ)| = 0,k→∞ ξ∈R ncioè F [ϕ k ] → 0 per k → ∞ in S. Il lemma è <strong>di</strong>mostrato.6 Se f ∈ L 1 (R n ) e F [f] = 0, allora f = 0 quasi ovunque. Per mancanza <strong>di</strong> una descrizionedella classe delle trasformate <strong>di</strong> Fourier delle funzioni in L 1 (R n ), questa proprietà non si<strong>di</strong>mostra tanto facilmente.185✷
La trasformazione inversa <strong>di</strong> Fourier F −1 possiede proprietà analoghe.Assumiamo l’uguaglianza (D.1) come definizione <strong>di</strong> trasformata <strong>di</strong> FourierF [f] <strong>di</strong> qualunque funzione generalizzata <strong>di</strong> crescita lenta f:(F [f], ϕ) = (f, F [ϕ]), f ∈ S ′ , ϕ ∈ S. (D.12)Verifichiamo che il secondo membro <strong>di</strong> quest’uguaglianza definisce un funzionalelineare continuo su S, cioè che F [f] ∈ S ′ . Infatti, visto che F [ϕ] ∈ Sper tutte le ϕ ∈ S, ϕ ↦→ (f, F [ϕ]) è un funzionale (evidentemente, lineare)su S. Supponiamo che ϕ k → 0 per k → ∞ in S. Per la Proposizione D.1,F [ϕ k ] → 0 per k → ∞ in S e quin<strong>di</strong>, in virtù del fatto che f appartiene a S ′ ,si ha (f, F [ϕ k ]) → 0 per k → ∞, <strong>di</strong> modo che il funzionale ϕ ↦→ (f, F [ϕ]) ècontinuo su S. Dunque, l’operazione <strong>di</strong> trasformazione <strong>di</strong> Fourier F porta lospazio S ′ in S ′ .Inoltre, F è un’operazione lineare e continua da S ′ in S ′ . La linearità <strong>di</strong>F è evidente. Dimostriamo la sua continuità. Supponiamo che f k → 0 perk → ∞ in S ′ . In questo caso, in base alla (D.12), si ottiene per tutte le ϕ ∈ S(F [f k ], ϕ) = (f k , F [ϕ]) → 0, k → ∞.Ciò significa che F [f k ] → 0 per k → ∞ in S ′ , cioè l’operazione F è continuada S ′ in S ′ .Introduciamo in S ′ ancora un’operazione <strong>di</strong> trasformazione <strong>di</strong> Fourier chedenotiamo con F −1 :F −1 [f] = 1(2π) n F [f(−x)], f ∈ S′ . (D.13)Dimostriamo che l’operazione F −1 è un’operazione inversa <strong>di</strong> F , cioèF −1 [F [f]] = f, F [F −1 [f]] = f, f ∈ S ′ . (D.14)Infatti, dalle (D.10)-(D.13) per tutte le ϕ ∈ S, si ottengono le uguaglianze(F −1 [F [f]], ϕ) = 11(F [F [f](−ξ)], ϕ) = (F [f](−ξ), F [ϕ])(2π)n(2π)n= 1(2π) (F [f], F [ϕ](−ξ)) = (F [f], F −1 [ϕ]) = (f, F [F −1 [ϕ]])n= (f, ϕ) = (f, F −1 [F [ϕ]]) = (F −1 [f], F [ϕ]) = (F [F −1 [f]], ϕ),dove abbiamo utilizzato le corrispondenti proprietà in S al sesto ed al settimopassaggio. 7 Ora seguono le formule (D.14).7 Si noti che S ⊆ L 2 (R n ).186
Dalle formule (D.14) deriva che ogni funzione generalizzata f appartenentea S ′ è la trasformata <strong>di</strong> Fourier della funzione generalizzata g = F −1 [f] appartenentea S ′ , con f = F [g], e se F [f] = 0, si ha anche f = 0. Abbiamo,quin<strong>di</strong>, <strong>di</strong>mostrato che le trasformazioni <strong>di</strong> Fourier F e F −1 trasformano S ′ inS ′ in modo biunivoco e continuo.Supponiamo che f = f(x, y) ∈ S ′ (R n+m ) dove x ∈ R n ed y ∈ R m . Introduciamola trasformata <strong>di</strong> Fourier F x [f] rispetto alle variabili x = (x 1 , x 2 , · · · , x n ),ponendo per qualunque ϕ = ϕ(x, y) ∈ S(R n+m )Come nella Proposizione D.1, si stabilisce che∫F ξ [ϕ](x, y) =(F x [f], ϕ) = (f, F ξ [ϕ]). (D.15)ϕ(ξ, y)e −i(ξ,x) dξ ∈ S(R n+m )e l’operazione F ξ [ϕ] è continua da S(R n+m ) in S(R n+m ), <strong>di</strong> modo che la formula(D.15) definisce realmente una funzione generalizzata F x [f](ξ, y) appartenentea S ′ (R n+m ).Esempio. Dimostriamo cheF [δ(x − x 0 )] = e −i(ξ,x 0) .(D.16)Infatti,(F [δ(x − x 0 )], ϕ) = (δ(x − x 0 ), F [ϕ]) = F [ϕ](x 0 )∫= ϕ(ξ)e −i(ξ,x0) dξ = (e −i(ξ,x0) , ϕ), ϕ ∈ S.Ponendo nella (D.16) x 0 = 0, si ottieneF [δ] = 1,(D.17)da cui<strong>di</strong> modo cheδ = F −1 [1] = 1(2π) n F [1],F [1] = (2π) n δ(ξ).(D.18)187
3.1 Proprietà della trasformazione <strong>di</strong> Fourier(a) Derivazione della trasformata <strong>di</strong> Fourier. Se f ∈ S ′ , si haD α F [f] = F [(−ix) α f].Infatti, utilizzando la (D.7), si ottiene per tutte le ϕ ∈ S(D α F [f], ϕ) = (−1) |α| (F [f], D α ϕ) = (−1) |α| (f, F [D α ϕ])= (−1) |α| (f, (ix) α F [ϕ]) = ((−ix) α f, F [ϕ]) = (F [(−ix) α f], ϕ),da cui segue la formula (D.19).(D.19)In particolare, ponendo nella (D.19) f = 1 ed utilizzando la formula(D.18), abbiamoF [x α ](ξ) = i |α| D α F [1](ξ) = (2π) n i |α| D α δ(ξ).(b) Trasformata <strong>di</strong> Fourier della derivata. Se f ∈ S ′ , si haF [D β f] = (iξ) β F [f].Infatti, utilizzando la formula (D.6), si ottiene per tutte le ϕ ∈ S(F [D β f], ϕ) = (D β f, F [ϕ]) = (−1) |β| (f, D β F [ϕ])(D.20)(D.21)= (−1) |β| (f, F [(−iξ) β ϕ]) = (−1) |β| (F [f], (−iξ) β ϕ) = ((iξ) β F [f], ϕ),da cui segue la formula (D.21).(c) Trasformata <strong>di</strong> Fourier <strong>di</strong> una traslazione. Se f ∈ S ′ , si haInfatti, abbiamo per tutte le ϕ ∈ SF [f(x − x 0 )] = e −i(x 0,x) F [f].(F [f(x − x 0 )], ϕ) = (f(x − x 0 ), F [ϕ]) = (f, F [ϕ](x + x 0 ))= (f, F [ϕe −i(x 0,ξ) ]) = (F [f], e −i(x 0,ξ) ϕ) = (e −i(x 0,ξ) F [f], ϕ),da cui segue la formula (D.22).(d) Traslazione della trasformata <strong>di</strong> Fourier. Se f ∈ S ′ , si haF [f](ξ + ξ 0 ) = F [e i(ξ 0,x) f](ξ).Infatti, utilizzando la formula (D.22), si ottiene per tutte le ϕ ∈ S(F [f](ξ + ξ 0 ), ϕ) = (F [f], ϕ(ξ − ξ 0 )) = (f, F [ϕ(ξ − ξ 0 )])= (f, e i(ξ 0,x) F [ϕ]) = (e i(ξ 0,x) f, F [ϕ]) = (F [e i(ξ 0,x) f], ϕ),da cui segue la formula (D.23).188(D.22)(D.23)
(e) Trasformata <strong>di</strong> Fourier <strong>di</strong> similitu<strong>di</strong>ne (con riflessione). Se f ∈S ′ , per tutti i valori reali <strong>di</strong> c ≠ 0 si haF [f(cx)](ξ) = 1 ( ) ξ|c| F [f] , (D.24)n cpoichè per tutte le ϕ ∈ S abbiamo(F [f(cx)], ϕ) = (f(cx), F [ϕ]) = 1 ( ( x))f, F [ϕ]|c| n c= 1 ( ∫) ∫f, ϕ(ξ)e −i( x|c| n c ,ξ) dξ = (f, ϕ(cξ ′ )e −i(x,ξ′) dξ ′ ) = (f, F [ϕ(cξ)])= (F [f], ϕ(cξ)) = 1 ( ( ) ) ξF [f] , ϕ .|c| n c189
190
Appen<strong>di</strong>ce EINTEGRAZIONE SECONDOLEBESGUEL’integrale <strong>di</strong> Riemann non basta per stu<strong>di</strong>are la fisica matematica, grazie allesua pessime proprietà <strong>di</strong> convergenza. D’altra parte, l’integrale <strong>di</strong> Lebesguecopre tutte le applicazioni <strong>di</strong> fisica matematica ma non è facile da introdurre inpoco tempo. Fortunatamente lo stu<strong>di</strong>o degli insiemi <strong>di</strong> Borel e delle funzionimisurabili secondo Borel ci permette a generalizzare il concetto <strong>di</strong> integraleabbastanza ma a farlo in tempi ragionevoli.1 Insiemi <strong>di</strong> BorelUn sottoinsieme <strong>di</strong> R n è detto insieme <strong>di</strong> Borel se appartiene alla famiglia<strong>di</strong> sottoinsiemi <strong>di</strong> R n più piccola ottenuta dagli insiemi aperti applicando leseguenti operazioni: 1) unione finita o numerabile, 2) intersezione finita onumerabile, e 3) complementazione [cioè l’operazione B ↦→ R n \ B]. È chiaroche tutti i sottoinsiemi aperti e chiusi <strong>di</strong> R n sono <strong>di</strong> Borel. Per n = 1 gliintervalli [a, b) = ∩ ∞ n=1 (a − 1 , b) e (a, b] = n ∩∞ n=1 (a, b + 1 ) sono <strong>di</strong> Borel.nSiano a, b ∈ R n , dove a = (a 1 , . . . , a n ), b = (b 1 , . . . , b n ), a 1 < b 1 , . . .,a n < b n . Alloram([a, b)) = (b 1 − a 1 ) . . . (b n − a n )è la misura del pluriintervallo [a, b). Per un’unione finita o numerabile E <strong>di</strong>pluriintervalli due a due <strong>di</strong>sgiunti si definisce la sua misura m(E) come lasomma delle misure dei pluriintervalli, possibilmente con m(E) = +∞. Alloram([a, ∞)) = +∞, dove [a, +∞) = {x ∈ R n : x 1 > a 1 , . . . , x n > a n }. Siccometutte le palle B ε (a) = {x ∈ R n : ‖x − a‖ 2 < ε} sono unioni numerabili duea due <strong>di</strong>sgiunti <strong>di</strong> pluriintervalli, anche la misura <strong>di</strong> B ε (a) si può calcolare.191
Osservando ora che tutti gli aperti sono unioni finite o numerabili <strong>di</strong> palle, sipuò estendere la misura a qualsiasi sottoinsieme aperto <strong>di</strong> R n .Sia Σ la cosiddetta σ-algebra degli insiemi <strong>di</strong> Borel in R n , dove σ-algebravuol <strong>di</strong>re una famiglia <strong>di</strong> sottoinsiemi chiusa rispetta all’unione finita e numerabile,all’intersezione finita e numerabile e alla complementazione che contienel’insieme vuoto e R n stesso, insieme con la misura <strong>di</strong> Borel. Questa misura hale seguenti proprietà:1. m(∅) = 0 e m(R n ) = +∞,2. Se {B n } ∞ n=1 è una famiglia numerabile <strong>di</strong> insiemi <strong>di</strong> Borel due a due<strong>di</strong>sgiunti, allora ∪ ∞ n=1 B n è un insieme <strong>di</strong> Borel e( ∞)⋃∞∑m B n = m(B n ).n=1Di conseguenza, se {C n } ∞ n=1 è una successione crescente <strong>di</strong> insiemi <strong>di</strong> Borel,allora( ∞)⋃m C n = lim m(C n ).n→∞n=1Purtroppo la σ-algebra degli insiemi <strong>di</strong> Borel ha la proprietà che non tuttii sottoinsiemi degli insiemi <strong>di</strong> Borel <strong>di</strong> misura zero sono <strong>di</strong> Borel. Per questomotivo la σ-algebra <strong>di</strong> Borel viene estesa a quella <strong>di</strong> Lebesgue: Un sottoinsiemeA <strong>di</strong> R n si <strong>di</strong>ce misurabile (secondo Lebesgue) se esiste un insieme <strong>di</strong> Borel Btale che la cosiddetta <strong>di</strong>fferenza simmetrica A△B def= (A \ B) ∪ (B \ A) è unsottoinsieme <strong>di</strong> un insieme <strong>di</strong> Borel <strong>di</strong> misura zero. In tal caso si definiscecome la misura m(A) quella dell’insieme <strong>di</strong> Borel B. Si può <strong>di</strong>mostrare che gliinsiemi misurabili secondo Lebesgue costituiscono una σ-algebra con le seguentiproprietà:1. m(∅) = 0 e m(R n ) = +∞,2. Se {B n } ∞ n=1 è una famiglia numerabile <strong>di</strong> insiemi misurabili due a due<strong>di</strong>sgiunti, allora ∪ ∞ n=1 B n è un insieme misurabile e( ∞)⋃∞∑m B n = m(B n ).n=1Di conseguenza, se {C n } ∞ n=1 è una successione crescente <strong>di</strong> insiemi misurabili,allora( ∞)⋃m C n = lim m(C n ).n→∞n=1192n=1n=1
È molto <strong>di</strong>fficile in<strong>di</strong>viduare un sottoinsieme <strong>di</strong> R n che non è misurabile.Dall’assioma <strong>di</strong> scelta segue la sua esistenza. 1 Purtroppo esistono altri assiomidella teoria degli insiemi che conducono ad una situazione in cui ognisottoinsieme <strong>di</strong> R n è misurabile.2 Integrale <strong>di</strong> LebesgueSi <strong>di</strong>ce funzione semplice una funzione complessa ϕ definita in R n che hasoltanto un numero finito <strong>di</strong> valori e per cui tutti gli insiemi {x ∈ R n : ϕ(x) =c} sono misurabili <strong>di</strong> misura finita. Essendo λ 1 , . . . , λ m i valori <strong>di</strong>versi dellafunzione semplici ϕ, si ha{m∑ λ j , x ∈ E j ,ϕ(x) = λ j χ Ej =0, x ∈ R n \ ∪ m j=1 E j ,j=1dove E 1 , . . . , E m sono insiemi misurabili <strong>di</strong> misura finita <strong>di</strong>sgiunti due a due eχ E è la funzione caratteristica <strong>di</strong> E (cioè, χ E (x) = 1 se x ∈ E, e χ E (x) = 0 sex /∈ E). Come integrale <strong>di</strong> Lebesgue si definisce∫ϕ(x) dx def=m∑λ j m(E j ).Una funzione f : R n → C si <strong>di</strong>ce misurable se per ogni insieme <strong>di</strong> Borel Ein C l’immagine inversaj=1f −1 (E) = {x ∈ R n : f(x) ∈ E}è misurabile. In particolare, le funzioni continue f : R n → C sono misurabili.Le funzioni misurabili hanno le seguenti proprietà:1. Se f, g : R n → C sono misurabili, allora f + g e f − g sono misurabili.2. Se f : R n → C è misurabile e λ ∈ C, allora λf è misurabile.1 Dim: La relazione x ∼ y ⇐⇒ x − y ∈ Q è una relazione <strong>di</strong> equivalenza in [0, 1)che sud<strong>di</strong>vide [0, 1) in classi <strong>di</strong> equivalenza. Applicando l’Assioma <strong>di</strong> Scelta, sia E unsottoinsieme <strong>di</strong> [0, 1) che contiene esattamente un elemento <strong>di</strong> ogni classe <strong>di</strong> equivalenza.defAllora, per ogni q ∈ [0, 1) ∩ Q, E q = [(q + E) ∩ [0, 1)] ∪ [(q − 1 + E) ∩ [0, 1)] è un sottoinsieme<strong>di</strong> [0, 1) che contiene esattamente un elemento <strong>di</strong> ogni classe <strong>di</strong> equivalenza. Se E fossemisurable, lo sarebbe anche E q per ogni q ∈ [0, 1) ∩ Q. In tal caso la misura <strong>di</strong> E q non<strong>di</strong>penderebbe da q, mentre ∪ q∈[0,1)∩Q E q = [0, 1). Quin<strong>di</strong> sia l’ipotesi m(E) = 0 che quellam(E) > 0 condurebbe alla contrad<strong>di</strong>zione che m([0, 1)) ∈ {0, +∞}. Di conseguenza, E nonpuò essere misurabile.193
3. Se f, g : R n → C sono misurabili, allora fg è misurabile.4. Se f : R n → C e g : C → C sono misurabili, allora il prodotto <strong>di</strong>composizione g ◦ f : R n → C è misurabile.5. Se f, g : R n → R sono misurabili, allora max(f, g), min(f, g), |f| =max(f, −f), f + = max(f, 0) e f − = max(−f, 0) sono misurabili.6. Se f 1 , f 2 , . . . sono misurabili e f = lim n→∞ f n , allora f è misurabile.Definiamo ora l’integrale <strong>di</strong> Lebesgue per le funzioni misurabili non negative.Sia f : R n → R + misurabile e non negativa. Allora esiste una successionecrescente <strong>di</strong> funzioni semplici non negative {f n } ∞ n=1 tali che f(x) =lim n→∞ f n (x) per ogni x ∈ R n (tranne in un sottoinsieme <strong>di</strong> misura zero). Intal caso la successione degli integrali <strong>di</strong> Lebesgue ∫ f n (x) dx è crescente e ilsuo limite (che potrebbe essere uguale a +∞) si definisce come l’integrale <strong>di</strong>Lebesgue della f:∫∫f(x) dx = lim f n (x) dx.n→∞Nel seguente teorema i valori degli integrali possono essere uguali a +∞.Teorema E.1 (Beppo-Levi) Sia {f n } ∞ n=1 una successione crescente <strong>di</strong> funzionimisurabili non negative. Sia f(x) = lim n→∞ f n (x) per x ∈ R n . Allora∫limn→∞∫f n (x) dx =f(x) dx.Passiamo ora all’integrazione delle funzioni a valori reali. Sia f : R n → Rmisurabile. Poniamo f ± = max(±f, 0). Allora f ± : R n → R + sono misurabilie non negative e f + − f − = f. Poniamo ora∫def=f(x) dx⎧∫ f+ (x) dx − ∫ f − (x) dx se ambedue gli integrali sono finiti,⎪⎨+∞ se ∫ f + (x) dx = +∞ e ∫ f − (x) dx < +∞,−∞⎪⎩non esistentese ∫ f + (x) dx < +∞ e ∫ f − (x) dx = +∞,se ∫ f + (x) dx = ∫ f − (x) dx = +∞.194
Inoltre,∫|f(x)| dx⎧∫ f+ (x) dx + ∫ f − (x) dxdef=se ambedue gli integrali sono finiti,⎪⎨+∞ se ∫ f + (x) dx = +∞ e ∫ f − (x) dx < +∞,+∞ se ∫ f + (x) dx < +∞ e ∫ f − (x) dx = +∞,⎪⎩non definitose ∫ f + (x) dx = ∫ f − (x) dx = +∞.Una∫funzione misurabile f : R n → R si <strong>di</strong>ce sommabile se ambedue gli integralif± (x) dx sono finiti.Per definire gli integrali delle funzioni misurabili f : R n → C, si osserviprima che Re f : R n → R e Im f : R n → R sono misurabili. In tal caso, sesono definiti ambedue gli integrali ∫ Re f(x) dx e ∫ Im f(x) dx, allora∫f(x) dx def=∫∫Re f(x) dx + iIm f(x) dx.Una funzione misurabile f : R n → C si <strong>di</strong>ce sommabile se è finito l’integraledella funzione |f| = √ (Re f) 2 + (Im f) 2 .L’integrale <strong>di</strong> Lebesgue ha le seguenti proprietà:1. ∫ (f(x) ± g(x)) dx = ∫ f(x) dx ± ∫ g(x) dx.2. ∫ cf(x) dx = c ∫ f(x) dx,3. | ∫ f(x) dx| ≤ ∫ |f(x)| dx.4. Se {x ∈ R n : f(x) ≠ g(x)} ha misura zero, allora ∫ f(x) dx = ∫ g(x) dx.L’ultima proprietà è <strong>di</strong> estrema importanza per capire l’integrale <strong>di</strong> Lebesgue:Il suo valore non si cambia se la funzione viene mo<strong>di</strong>ficata su un insieme <strong>di</strong>misura zero. Due funzione f, g come nella proprietà 4 si <strong>di</strong>cono quasi uguali.Oppure: Si <strong>di</strong>ce che f(x) = g(x) quasi ovunque.Infine, se E è un sottoinsieme misurabile <strong>di</strong> R n , una funzione f : E → C si<strong>di</strong>ce misurabile se la sua estensione ˜f : R n → C definita da{f(x), x ∈ E,˜f(x) =0, x ∈ R n \ E,è misurabile. In tal caso ∫E∫f(x) dx def=˜f(x)χ E (x) dx,dove χ E (x) = 1 per x ∈ E e χ E (x) = 0 per x ∈ R n \ E.Discutiamo ora il seguente esempio illustrativo.195
Esempio E.2 Sia f : R + → R definita da⎧⎨sin(x)f(x) = x , x > 0,⎩1, x = 0.Allora la f è continua per x ≥ 0 e quin<strong>di</strong> misurabile.Riemann generalizzataVale l’integrale <strong>di</strong>∫ ∞0sin(x)x∫ Ndx def= limN→+∞0sin(x)xdx = π 2 .Purtroppo questo integrale non è un integrale <strong>di</strong> Lebesgue. Infatti,⎧⎨sin(x), 2(n − 1)π ≤ x ≤ (2n − 1)π,f + (x) = x⎩0, altrove;⎧⎨− sin(x) , (2n − 1)π ≤ x ≤ 2nπ,f − (x) = x⎩0, altrove,dove n = 1, 2, 3, . . .. Osservando che∫ (2n−1)π∫ 2nπsin(x) dx = − sin(x) dx = 1,2(n−1)π(2n−1)πsi vede facilmente che∫∫f + (x) dx ≥f − (x) dx ≥∞∑n=1∞∑n=11(2n − 1)π = +∞,12nπ = +∞.Quin<strong>di</strong> ∫ f(x) dx non esiste nel senso <strong>di</strong> Lebesgue.3 Alcuni Teoremi ImportantiIl seguente risultato riguarda lo scambio tra limite e integrazione.Teorema E.3 (della convergenza dominata, <strong>di</strong> Lebesgue) Sia {f n } ∞ n=1una successione <strong>di</strong> funzioni misurabili tali chea. lim n→∞ f n (x) = f(x) per quasi ogni x,196
. per n = 1, 2, 3, . . . si ha |f n (x)| ≤ g(x) per quasi ogni x, dove g èsommabile.Allora∫limn→∞∫f n (x) dx =f(x) dx.La seconda con<strong>di</strong>zione è assolutamente necessaria.Esempio E.4 Sia φ : R → R una funzione continua e non negativa tale che∫lim φ(x) = 0,x→±∞∞−∞φ(x) dx = 1.Ponendo f n (x) = φ(x − n), si vede facilmente che∫∫lim f n (x) dx = 1, lim f n(x) dx = 0.n→∞n→∞} {{ }} {{ }sempre uguale ad 1uguale a 0 q.o.Dunque non è consentita l’applicazione del Teorema della Convergenza Dominata.Esempio E.5 Sia φ : R → R + una funzione continua e non negativa tale cheφ(0) > 0,∫lim xφ(x) = 0,x→±∞∞−∞φ(x) dx = 1.Ponendo f n (x) = nφ(nx), si vede subito che f n (x) → 0 per x ≠ 0 e f n (0) →+∞. Quin<strong>di</strong>∫∫lim f n (x) dx = 1, lim f n(x) dx = 0.n→∞n→∞} {{ }} {{ }sempre uguale ad 1uguale a 0 q.o.Dunque non è consentita l’applicazione del Teorema della Convergenza Dominata.Il Teorema della Convergenza Dominata è fondamentale e ha molti corollari<strong>di</strong> importanza. Per esempio, sia f(·, ξ) : R n × Ω → C una funzione sommabileche depende in modo continuo dal parametro ξ ∈ Ω. Allora ∫ f(x, ξ) dxdepende in modo continuo da ξ ∈ Ω se esiste una funzione sommabileg : R n → C tale che |f(x, ξ)| ≤ g(x) per quasi ogni x ∈ R n e ogni ξ ∈ Ω. Infatti,scegliendo η ∈ Ω, basterebbe considerare una successione in {η n } ∞ n=1 in Ωconvergente ad η e la successione <strong>di</strong> funzioni f n (x) = f(x, η n ) per n = 1, 2, 3, . . .per <strong>di</strong>mostrare il corollario.L’ultimo risultato riguarda il cambio dell’or<strong>di</strong>ne <strong>di</strong> integrazione.197
Teorema E.6 (Fubini) Sia f : R n+m → C, scritta come funzione <strong>di</strong> z =(x, y) con x ∈ R n , y ∈ R m e z ∈ R n+m , misurabile e non negativa, oppuresommabile. Allora∫(∫f(z) dz =R∫R n+m n R m) (∫f(x, y) dy dx =∫R m R nIn particolare, la (D.1) vale nei seguenti casi:)f(x, y) dx dy. (E.1)1. almeno uno degli integrali ∫ ∫ |f(x, y)| dy dx e ∫ ∫ |f(x, y)| dx dy è finito.2. La f è non negativa quasi ovunque.198
Appen<strong>di</strong>ce FFUNZIONI ANALITICHENel presente corso faremo uso <strong>di</strong> alcune proprietà (da <strong>di</strong>scutere in questoparagrafo) delle funzioni analitiche.Sia f : G → C, dove G è un aperto in C. Allora f si <strong>di</strong>ce analitica seè derivabile rispetto alla variabile complessa z ∈ G e la sua derivata f ′ ècontinua. In altre parole, per ogni w ∈ G esiste un numero complesso f ′ (w)tale chef(z) = f(w) + (z − w) [f ′ (w) + ε(z)] ,dove |ε(z)| → 0 se |z − w| → 0 per z ∈ G; inoltre, la funzione f ′ : G →C è continua. Una funzione analitica è continua. Inoltre valgono le regoleper l’analiticità della somma, del prodotto e della composta <strong>di</strong> due funzionianalitiche analoghe quelle che valgono per le funzioni derivabili in una variabilereale.Sia f : G → C una funzione definita su un aperto G in C che è rappresentabilecome la somma <strong>di</strong> una serie <strong>di</strong> potenze avente raggio <strong>di</strong> convergenzapositiva in ogni punto w ∈ G. Ciòe, per ogni w ∈ G esistono coefficienti{a n (w)} ∞ n=0 ed un numero positivo R(w) tali chef(z) =∞∑a n (w)(z − w) n , |z − w| < R(w). (F.1)n=0In tal caso f è analitica indefinitamente derivabile:f (k) (z) =∞∑(n+k)(n+k −1) · · · (n+1)a n+k (w)(z −w) n , |z −w| < R(z 0 ),n=0mentre a n (w) = f (n) (w)/(n!). D’altra parte, una funzione analitica f : G → Csi può scrivere nella forma (F.1) per un opportuno R(w) > 0 per ogni w ∈ G.199
Sia f : G → C una funzione analitica su un aperto G in C. All’apertoG ⊂ C facciamo corrispondere un aperto ˜G ⊂ R 2 tale che (x, y) ∈ ˜G se e solose x + i y ∈ G. Ora definiamo u, v : ˜G → R dalla formulaf(x + iy) = u(x, y) + i v(x, y),(x, y) ∈ ˜G.Allora u, v : ˜G → R sono <strong>di</strong>fferenziabili (nel senso del corso <strong>di</strong> Analisi MatematicaIII), esiste un numero infinito <strong>di</strong> derivate parziali successive <strong>di</strong> u e vrispetto ad x ed y, e valgono le cosiddette equazioni <strong>di</strong> Cauchy-Riemann 1In tal caso, abbiamo∂u∂x = ∂v∂y ,∂u∂y = −∂v ∂x .(F.2)∂ 2 u∂x 2 + ∂2 u∂y 2 = ∂2 v∂x∂y − ∂2 v∂y∂x = 0,∂ 2 v∂x + ∂2 v2 ∂y = − ∂2 u2 ∂x∂y + ∂2 u∂y∂x= 0. (F.3)Usando l’uguaglianza (simbolica) (u + iv)(dx + i dy) = (u dx − v dy) + i(v dx +u dy), si vede facilmente (dalla (F.2)) che le forme <strong>di</strong>fferenziali u dx − v dy ev dx + u dy sono ambedue chiuse. Quin<strong>di</strong>, se ˜G (oppure G) è semplicementeconnesso, queste due forme <strong>di</strong>fferenziali sono esatte. Di conseguenza, se G èsemplicemente connesso e γ è una curva chiusa e rettificabile (cioè, <strong>di</strong> lunghezzaben definita e finita) in G, allora∫∫(u dx − v dy) = 0, (v dx + u dy) = 0,˜γdove ˜γ = {(x, y) ∈ R 2 : x + i y ∈ γ}. Ciò implica che∫∫∫f(z) dz = (u dx − v dy) + i (v dx + u dy) = 0. (F.4)γ˜γL’affermazione (F.4) si chiama il Teorema <strong>di</strong> Cauchy. È il risultato più importantedella teoria delle funzioni analitiche. Osserviamo che purtroppo il ragionamentoseguito non è una <strong>di</strong>mostrazione esaustiva e quin<strong>di</strong> completamenterigorosa.Enunciamo adesso due altri importanti teoremi (collegati al precedente).Teorema F.1 Sia {f n } ∞ n=1 una successione <strong>di</strong> funzioni analitiche sull’apertoG che converga ad una funzione f : G → C uniformemente in z ∈ K per unqualunque compatto K in G. Allora f è analitica.1 Se si specifica il valore della f nel punto a ∈ G, allora f(z) = 2u( 1 2 [z + a], 1 2i[z − a]) −f(a) = 2iv( 1 2 [z + a], 1 2i[z − a]) + f(a) per z ∈ G. Ve<strong>di</strong> [15].200˜γ˜γ
Teorema F.2 Sia {f n } ∞ n=1 una successione <strong>di</strong> funzioni analitiche sull’apertoG tale che la serie <strong>di</strong> funzioni∞∑f n (z)n=1converga uniformemente in z ∈ K per un qualunque compatto K in G. Allorala sua somma rappresenta una funione analitica su G.Discutiamo due risultati semplici ed importanti per le funzioni analitiche.Teorema F.3 Siano f, g : G → C due funzioni analitiche sull’aperto connessoG tali che f(z) = g(z) per ogni z ∈ E, dove E è un sottoinsieme <strong>di</strong> G conalmeno un punto <strong>di</strong> accumulazione all’interno <strong>di</strong> G. Allora f(z) = g(z) perogni z ∈ G.In particolare, applicando il Teorema F.3 per g(z) ≡ 0, si vede facilmenteche una funzione analitica f ≢ 0 ha un numero finito <strong>di</strong> zeri oppure i suoi zerisi accumulano sulla frontiera <strong>di</strong> G.Adesso enunciamo il fondamentale Teorema <strong>di</strong> Liouville.Teorema F.4 Sia f : C → C una funzione analitica definita sull’intero pianocomplesso. Allora f è non limitata oppure costante.La <strong>di</strong>mostrazione è abbastanza facile. Di seguito ne <strong>di</strong>amo lo schema qui.Sia f : C → C una funzione analitica e sia C R il cerchio <strong>di</strong> centro 0 e raggio Rin C con orientamento positivo. Allora (2πi) −1 ∫ C R(z −w) −1 dz = 1 per w ∈ Ccon |w| < R (lo si controlli!) implica 2 chef(w) = 1 ∫2πi C RCiò comporta [perché?] chef ′ (w) = 1 ∫2πi C Rf(z)dz, |w| < R.z − wf(z)dz, |w| < R.(z − w)2Di conseguenza, se |f(z)| ≤ M per z ∈ C, risulterebbe|f ′ (w)| ≤ 12π 2πR M(R − |w|) , R > |w|,22 Si scriva f(z) = f(w) + [f(z) − f(w)] e si osservi che [f(z) − f(w)]/(z − w) è analiticain z ∈ C. Poi si applichi il Teorema <strong>di</strong> Cauchy.201
e quin<strong>di</strong> f ′ (w) = 0. Siccome w ∈ C è arbitrario, f deve essere una funzionecostante. Come corollario si afferma che una funzione analitica f : C → C conlimite zero per |z| → +∞ deve annularsi in ogni z ∈ C.Definiamo ora le funzioni meromorfe e <strong>di</strong>scutiamo le loro singolarità. Inprimo luogo una funzione analitica f : G → C con f ≢ 0 ha un numerofinito o un’infinità numerabile <strong>di</strong> zeri. Un numero complesso z 0 si <strong>di</strong>ce zero<strong>di</strong> or<strong>di</strong>ne m per f se f(z) = (z − z 0 ) m g(z) per g : G → C una funzioneanalitica e g(z 0 ) ≠ 0. In altri termini, z 0 è uno zero <strong>di</strong> or<strong>di</strong>ne m se e solo sef(z 0 ) = f ′ (z 0 ) = · · · = f (m−1) (z 0 ) = 0 e f (m) (z 0 ) ≠ 0. Se G è un aperto in C,w ∈ G e f è analitica su G \ {w}, il punto w si <strong>di</strong>ce polo <strong>di</strong> or<strong>di</strong>ne m se esisteuna funzione analitica g : G → C con g(w) ≠ 0 tale che f(z) = g(z)/(z − w) mper z ∈ G \ {w}.Sia G un aperto in C. Una funzione f si <strong>di</strong>ce meromorfa su G se esiste unsottoinsieme finito oppure numerabile E <strong>di</strong> G senza punti <strong>di</strong> accumulazioneall’interno <strong>di</strong> G tale che f sia analitica in G \ E ed ogni punto <strong>di</strong> E sia un polodella f.Teorema F.5 (Principio dell’argomento) Sia f una funzione meromorfanell’aperto G. Sia γ una curva chiusa, semplice e rettificabile in G che nonpassa per i poli e per gli zeri <strong>di</strong> f, con un orientamento tale che il sottodominioΩ <strong>di</strong> G racchiuso da γ si trova alla sinistra <strong>di</strong> γ. Allora∫1 f ′ (z)2πi γ f(z) dz =n∑N(z k ) −k=1m∑P (p j ),dove z 1 , · · · , z n sono gli zeri in Ω, p 1 , · · · , p m sono i poli in Ω, N(z k ) è l’or<strong>di</strong>nedello zero z k e P (p j ) è l’or<strong>di</strong>ne del polo p j .j=1Dimostrazione.Posta∏ nk=1f(z) = g(z)(z − z k) N(z k)∏ mj=1 (z − p j) , P (p j)dove g(z) è una funzione meromorfa in G che non ha zeri nè poli in Ω, si haf ′ (z)f(z) =n∑k=1N(z k )z − z k−m∑j=1P (p j )+ g′ (z)z − p j g(z) ,dove g ′ (z)/g(z) è continua in Ω ∪ γ e analitica in Ω. Il teorema segue quin<strong>di</strong>dal Teorema <strong>di</strong> Cauchy.✷202
Corollario F.6 (Teorema <strong>di</strong> Rouché) Siano f, g funzioni meromorfe nell’apertoG. Sia γ una curva chiusa, semplice e rettificabile in G che non passaper i poli e per gli zeri <strong>di</strong> f e g, con un orientamento tale che il sottodominioΩ <strong>di</strong> G racchiuso da γ si trova alla sinistra <strong>di</strong> γ. Seallora|f(z) − g(z)| < |g(z)|, z ∈ γ, (F.5)Z f − P f = Z g − P g ,dove Z f e P f sono il numero degli zeri e dei poli della f in Ω e Z g e P g sonoil numero degli zeri e dei poli della g in Ω.Dimostrazione. L’ipotesi (F.5) implica che f/g manda γ nella palla {w ∈C : |w − 1| < 1}. In questa palla si può definire log(w) come funzione analiticatale che log(w) → 0 se w → 1. In tal caso, (log(f/g)) ′ = (f/g) ′ /(f/g) =(f ′ /f) − (g ′ /g). Quin<strong>di</strong>, utilizzando il Teorema <strong>di</strong> Cauchy e il Teorema F.5, siha0 = 1 ∫ ( )f ′ (z)2πi γ f(z) − g′ (z)dz = (Z f − P f ) − (Z g − P g ).g(z)✷Usando il Teorema <strong>di</strong> Rouché si trova facilmente una <strong>di</strong>mostrazione delTeorema Fondamentale dell’Algebra. Sia p(z) = z n + a 1 z n−1 + · · · + a n unpolinomio complesso <strong>di</strong> grado n e con coefficiente principale 1. Applichiamoil Teorema <strong>di</strong> Rouché per f(z) = p(z) e g(z) = z n . Siccome esiste R > 0 taleche ∣ ∣ ∣∣∣ f(z) ∣∣∣ g(z) − 1 ∣= ∣1 + a 1z + · · · + a ∣n ∣∣ < 1, |z| = R,z nsi può applicare il Teorema <strong>di</strong> Rouché per γ = {z ∈ C : |z| = R} e Ω = {z ∈C : |z| < R}. Abbiamo Z g = n e P f = P g = 0. Quin<strong>di</strong> Z f = n; <strong>di</strong> conseguenzap(z) ha n zeri nel dominio Ω = {z ∈ C : |z| < R}.Un’altra <strong>di</strong>mostrazione si basa sul Teorema <strong>di</strong> Liouville. Se p(z) è unpolinomio in z <strong>di</strong> grado n ∈ N senza zeri complessi, la funzione f(z) = 1/p(z)sarebbe una funzione analitica in tutto il piano complesso tale che f(z) → 0se |z| → ∞. Ciò implica che f(z) = 0 per ogni z ∈ C. Contrad<strong>di</strong>zione. Diconseguenza, p(z) ha almeno uno zero complesso.203
204
Appen<strong>di</strong>ce GAPPROSSIMAZIONE DAPOLINOMIIn quest’appen<strong>di</strong>ce <strong>di</strong>mostriamo il famoso teorema <strong>di</strong> Weierstrass sull’approssimazionedelle funzioni continue da polinomi. Noi seguiamo il testo <strong>di</strong> WalterRu<strong>di</strong>n [11, Teorema 8.24]. La <strong>di</strong>mostrazione fornita nell’appen<strong>di</strong>ce si deve aBernstein.Teorema G.1 [Weierstrass] Se f è una funzione complessa, continua in [a, b],allora esiste una successione <strong>di</strong> polinomi P n tale chelim P n(x) = f(x)n→∞uniformemente in x ∈ [a, b]. Se f è reale, si possono prendere i P n reali.Dimostrazione. Senza perdere la generalità supponiamo che [a, b] = [0, 1].Inoltre supponiamo che f(0) = f(1) = 0. Perchè, se il teorema è <strong>di</strong>mostratoin questo caso, si considerig(x) = f(x) − f(0) − x[f(1) − f(0)], 0 ≤ x ≤ 1.Allora g(0) = g(1) = 0 e, se g può essere ottenuto come limite <strong>di</strong> una successioneuniformemente convergente <strong>di</strong> polinomi, è chiaro che lo stesso vale perf, visto che f − g è un polinomio.Inoltre, per definizione, poniamo f(x) uguale a zero per x fuori da [0, 1].Allora f è uniformemente continua su tutta la retta reale.PoniamoQ n (x) = c n (1 − x 2 ) n , n ∈ N,dove c n è scelto in modo tale che∫ 1−1Q n (x) dx = 1, n ∈ N. (G.1)205
Abbiamo bisogno <strong>di</strong> alcune informazioni sull’or<strong>di</strong>ne <strong>di</strong> grandezza dei c n . Dalmomento che∫ 1−1(1 − x 2 ) n dx = 2dalla (G.1) segue che≥ 2∫ 10∫ √ 1/ n0(1 − x 2 ) n dx ≥ 2∫ 1/√ n0(1 − x 2 ) n dx(1 − nx 2 ) dx = 43 √ n > 1 √ n,c n < √ n.(G.2)Si può facilmente <strong>di</strong>mostrare la <strong>di</strong>suguaglianza (1−x 2 ) n ≥ 1−nx 2 che abbiamousato prima. 1Per ogni δ > 0, la (G.2) implicaQ n (x) ≤ √ n (1 − δ 2 ) n , δ ≤ |x| ≤ 1, (G.3)e quin<strong>di</strong> Q n → 0 uniformemente in δ ≤ |x| ≤ 1.Sia oraP n (x) =∫ 1−1f(x + t)Q n (t) dt, 0 ≤ x ≤ 1.Le ipotesi su f ci permettono a <strong>di</strong>mostrare, con un semplice cambio <strong>di</strong> variabile,cheP n (x) =∫ 1−x−xf(x + t)Q n (t) dt =∫ 10f(t)Q n (t − x) dt,e l’ultimo integrale è chiaramente un polinomio in x. Perciò la {P n } è unasuccessione <strong>di</strong> polinomi che sono reali se f è reale.Dato ε > 0, scegliamo δ > 0 tale che per |y − x| < δ si ha|f(y) − f(x)| < ε 2 .Sia M = sup |f(x)|. Servendoci dalla (G.1), della (G.3) e della relazioneQ n (x) ≥ 0, ve<strong>di</strong>amo che, per 0 ≤ x ≤ 1,∫ 1∫ 1|P n (x) − f(x)|=∣ [f(x + t) − f(x)]Q n (t) dt∣ ≤ |f(x + t) − f(x)|Q n (t) dt≤ 2M−1∫ −δ−1Q n (t) dt + ε 2∫ δ−δ≤ 4M √ n (1 − δ 2 ) n + ε 2 < ε−1Q n (t) dt + 2M∫ 1δQ n (t) dtper n abbastanza grande; il che conclude la <strong>di</strong>mostrazione del teorema.✷1 È un corollario della <strong>di</strong>suguaglianza <strong>di</strong> Bernouilli.206
Bibliografia[1] M. Abramowitz and I.A. Stegun, Handbook of Mathematical Functions,Dover Publ., New York, 1964.[2] R. Courant and D. Hilbert, Methoden der Mathematischen Physik, Vol. I,Springer, Berlin, 1967.[3] R. Courant and D. Hilbert, Methoden der Mathematischen Physik, Vol. II,Springer, Berlin, 1967.[4] J.B. Conway, Functions of One Complex Variable, Graduate Texts inMathematics 11, Springer, Berlin, 1975.[5] M.S.P. Eastham, The Spectral Theory of Perio<strong>di</strong>c Differential Equations,Scottish Academic Press, E<strong>di</strong>nburgh, 1973.[6] Enrico Giusti, Analisi Matematica 1-2 (due volumi), Bollati Boringhieri,Torino, 1989.[7] I.S. Gradshteyn and I.M. Ryzhik, Tables of Integrals, Series, and Products,Corrected and Enlarged E<strong>di</strong>tion, Academic Press, New York,1980.[8] N.N. Lebedev, Special Functions and their Applications, Dover Publ., NewYork, 1965.[9] A.I. Markushevich, Theory of Functions of a Complex Variable, Vols. 1-3,Chelsea Publ., New York, 1965.[10] R.G. Newton, Scattering of Waves and Particles, Springer, New York,1982; Dover, New York, 2002.[11] Walter Ru<strong>di</strong>n, Principles of Mathematical Analysis, Third ed., McGraw-Hill, New York, 1976. Esiste la traduzione italiana.[12] L. Schwartz, Théorie des Distributions, 2 vols., Hermann, Paris, 1966.207
[13] I.N. Sneddon, Special Functions of Mathematical Physics and Chemistry,Oliver and Boyd, E<strong>di</strong>nburgh and London, 1956.[14] Murray R. Spiegel, Vector Analysis, Schaum’s Outline Series, McGraw-Hill, New York 1959 (traduzione italiana: Analisi Vettoriale).[15] William T. Shaw, Recovering holomorphic functions from their real orimaginary parts without the Cauchy-Riemann equations, SIAM Review46(4), 717–728 (2004).[16] Gabor Szegő, Orthogonal Polynomials, American Mathematical SocietyColloquium Publications, Vol. 23, 1939; Reprinted 1991.[17] A.N. Tichonov e A.A. Samarskij, Equazioni della Fisica Matematica, Ed.Mir, Mosca, 1981.[18] D.A. Varshalovich, A.N. Moskalev, and V.K. Khersonskii, Quantum Theoryof Angular Momentum, World Scientific, Singapore, 1988; also: Nauka,Leningrad, 1975 (in Russian).[19] V.S. Vla<strong>di</strong>mirov, Equazioni della Fisica Matematica, Mir Italia-URSS,Mosca, 1987; anche Nauka, Mosca, 1981 [in Russo].[20] G.N. Watson, A Treatise on the Theory of Bessel Functions, Second Ed.,Cambridge University Press, London, 1962.[21] E.T. Whittaker and G.N. Watson, A Course of Modern Analysis, Fourthed., Cambridge Univ. Press, Cambridge, 1927.208