Stima di massima verosimiglianza di modelli ARMA
Stima di massima verosimiglianza di modelli ARMA
Stima di massima verosimiglianza di modelli ARMA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
dove si è posto x t = (x 1 , . . . , x t ) ′ .Prima <strong>di</strong> mostrare con esempi concreti l’utilizzo <strong>di</strong> tale fattorizzazione si rammentaal lettore la seguente proprietà delle normale multivariata per poi applicarlaal caso <strong>di</strong> serie storiche generate da processi gaussiani.Proprietà 1 (Normale con<strong>di</strong>zionata). Sia X un vettore casuale normale e si partizioniX, e il relativo vettore <strong>di</strong> me<strong>di</strong>e µ e la matrice <strong>di</strong> covarianza Σ comesegue[ ] ([ ] [ ])X1 µ1 Σ11 Σ∼ N ,12.X 2 µ 2 Σ 21 Σ 22La variabile casuale con<strong>di</strong>zionata X 2 |X 1 si <strong>di</strong>stribuisce come una normale conme<strong>di</strong>aE(X 2 |X 1 ) = µ 2 + Σ 21 Σ −111 (X 1 − µ 1 ), (7)e varianzaVar(X 2 |X 1 ) = Σ 22 − Σ 21 Σ −111 Σ 12. (8)Il valore della densità della prima osservazione è dato dalla <strong>di</strong>stribuzionemarginale del processo <strong>ARMA</strong> calcolata nel punto x 1 , cioè è data dalla densitàN ( µ, γ(0) ) in x 1 . Il valore delle densità con<strong>di</strong>zionata <strong>di</strong> X t+1 |X 1 , . . . , X t pert = 1, . . . , n − 1 è dato dalla normale con me<strong>di</strong>ae varianzaµ t+1|t = µ + γ ′ tΓ −1t (x t − µ)v t+1|t = γ(0) − γ ′ tΓ t γ t ,dove γ t = ( γ(1), . . . , γ(t) ) ′ , Γt = { γ(i − j) } te γ(k) è la funzione <strong>di</strong> autocovarianzadel processo <strong>ARMA</strong>. Il lettore avrà notato che anche queste formulei,j=1coinvolgono inverse <strong>di</strong> matrici <strong>di</strong> <strong>di</strong>mensioni potenzialmente molto gran<strong>di</strong>, tuttaviaesistono algoritmi (algoritmo <strong>di</strong> Durbin-Levinson, algoritmo delle innovazioni efiltro <strong>di</strong> Kalman) che riducono significativamente i conti. Il filtro <strong>di</strong> Kalman verràesposto più avanti nel corso.La funzione <strong>di</strong> log-<strong>verosimiglianza</strong> gaussiana è quin<strong>di</strong> data da{− 1 n∑n log(2π) + log v2t|t−1 + (x }t − µ t|t−1 ) 2v t|t−1t=1dove si è posto µ 1|0 = µ e v 1|0 = γ(0).Funzione <strong>di</strong> <strong>verosimiglianza</strong> <strong>di</strong> un AR(1)SiaX t = κ + φX t−1 + ε tun processo AR(1) stazionario gaussiano. Come noto, la me<strong>di</strong>a <strong>di</strong> X t è µ = κ/(1−φ) e la sua varianza γ(0) = σ 2 /(1 − φ 2 ), dove σ 2 è la varianza del white noise ε t .4
Proprietà 2 (Distribuzione asintotica delle stime ML <strong>di</strong> un modello <strong>ARMA</strong>). Sia{x 1 , . . . , x n } una serie storica generata da un processo <strong>ARMA</strong> stazionario, causalee invertibile e sia ˆβ n il vettore delle stime ML (o ML con<strong>di</strong>zionata) dei parametriveri β 0 = (κ, φ 1 , . . . , φ p , θ 1 , . . . , θ q ). Allora√ n(ˆβn − β 0)→ d N ( 0, I(β 0 ) −1) ,dove I(β 0 ) è la metrice <strong>di</strong> informazione <strong>di</strong> Fisher.Se il processo <strong>ARMA</strong> è a me<strong>di</strong>a nulla, cioè κ = 0 e β 0 =(φ 1 , . . . , φ p , θ 1 , . . . , θ q ), allora la matrice d’informazione <strong>di</strong> Fisher è data daI(β 0 ) = σ −2 Γ p,q ,dove Γ p,q è una matrice (p + q × p + q) con forma[ ]Γφφ ΓΓ p,q =φθ.Γ θφ Γ θθ• Γ φφ è la matrice (p × p) contenente le autocovarianze del processoautoregressivo φ(B)Y t = ε t .• Γ θθ è la matrice (q × q) contenente le autocovarianze del processoautoregressivo θ(B)Z t = ε t .• Γ φθ = {γ yz (i − j)} è la matrice (p × q) contenente le cross-covarianze delprocesso Y t con il processo Z t : γ yz (h) = E[Y t+h Z t ].Proprietà delle stime <strong>di</strong> un AR(1) a me<strong>di</strong>a nullaDato che γ(0) = σ 2 /(1 − φ 2 ), allora σ 2 Γ −11,0 = (1 − φ) da cuiˆφ n ≈ N(φ, (1 − φ 2 )/n).Proprietà delle stime <strong>di</strong> un MA(1) a me<strong>di</strong>a nullaIl processo da prendere in considerazione è una AR(1) con i parametri del MA(1):Z t = −θZ t−1 + ε t . Tale processo ha varianza pari a σ 2 /(1 − θ 2 ) e quin<strong>di</strong> lavarianza asintotica <strong>di</strong> ˆθ n è (1 − θ 2 ) eˆθ n ≈ N(θ, (1 − θ 2 )/n).Proprietà delle stime <strong>di</strong> un <strong>ARMA</strong>(1,1) a me<strong>di</strong>a nullaI due processi rilevanti sono y t = φy t−1 + ε t e z t = −θz t−1 + ε t , le cui varianzesono state calcolate nei due precedenti esempi. Per completare la matrice <strong>di</strong>covarianza asintotica è necessarioγ yz (0) = E[Y t Z t ] = E[(φY t−1 + ε t )(−θZ t−1 + ε t )] = φθγ yz (0) + σ 26
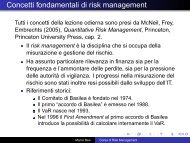
da cui γ yz (0) = σ 2 /(1 + φθ). La matrice <strong>di</strong> covarianza asintotica è quin<strong>di</strong>[ (1 − φ 2 ) −1 (1 + φθ) −1(1 + φθ) −1 (1 − θ 2 ) −1 ] −1===[1(1 − θ 2 ) −1 −(1 + φθ) −1 ](1 − φ 2 ) −1 (1 − θ 2 ) −1 − (1 + φθ) −2 −(1 + φθ) −1 (1 − φ 2 ) −1 =[1 (1 − φ 2 )(1 + φθ) 2 ]−(1 − φ)(1 − θ)(1 + φθ)(φ + θ) 2 −(1 − φ)(1 − θ)(1 + φθ) (1 − θ 2 )(1 + φθ) 2 .Purtroppo le proprietà per campioni finiti degli stimatori dei parametri dei <strong>modelli</strong><strong>ARMA</strong> sono virtualmente impossibili da derivare analiticamente. Tuttavia ènoto che le stime dei parametri autoregressivi sono <strong>di</strong>storte in maniera tale che lera<strong>di</strong>ci inverse dell’equazione caratteristica tendono a essere me<strong>di</strong>amente più piccoledelle ra<strong>di</strong>ci vere. La <strong>di</strong>storsione cresce con il crescere delle ra<strong>di</strong>ci inverse, e puòessere notevole quando i valori delle ra<strong>di</strong>ci sono prossimi all’unità.Per esempio, per un AR(1) con me<strong>di</strong>a nulla e coefficiente autoregressivoφ = 0.9, la <strong>di</strong>storsione è circa −0.07 per un campione <strong>di</strong> 20 osservazioni e scendea circa −0.02 per un campione <strong>di</strong> 100 osservazioni. La <strong>di</strong>storsione aumentanotevolmente quando si stima anche la costante: −0.20 per un campione <strong>di</strong> 20osservazioni e −0.04 per un campione <strong>di</strong> 100 osservazioni. Quando φ = 0.99 ela costante viene stimata si ha una <strong>di</strong>storsione <strong>di</strong> −0.23 per n = 20 e −0.05 pern = 100.Per quanto riguarda la forma della <strong>di</strong>stribuzione <strong>di</strong> ˆφ n per campioni finiti, siguar<strong>di</strong> la figura 1; è evidente l’asimmetria negativa (positiva quando φ < 0).4.03.53.02.52.01.51.00.5Approx.Monte CarloApprox.asintotica0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3Figura 1: Approssimazioni asintotica e Monte Carlo della <strong>di</strong>stribuzione <strong>di</strong> ˆφ n pern = 20.7