บทที่ 3. Central Force Motion - ภาควิชาฟิสิกส์ - มหาวิทยาลัยขอนแก่น
บทที่ 3. Central Force Motion - ภาควิชาฟิสิกส์ - มหาวิทยาลัยขอนแก่น
บทที่ 3. Central Force Motion - ภาควิชาฟิสิกส์ - มหาวิทยาลัยขอนแก่น

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-1<br />
θ<br />
เนือหา<br />
<strong>3.</strong>1 Center of Mass และ Reduced Mass<br />
<strong>3.</strong>2 สมการของ <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
<strong>3.</strong>3 Kepler's Problem<br />
<strong>3.</strong>4 Orbit Dynamics<br />
<strong>3.</strong>5 บทสรุป<br />
<strong>3.</strong>6 ปัญหาท้ายบท<br />
3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
ปรากฏการณ์การเคลืNอนทีNของดาวเคราะห์ นับเป็นความสําเร็จอย่างหนึ Nงของวิชากลศาสตร์ ทีN<br />
สามารถวิเคราะห์และทํานายการโคจรของดวงดาวได้อย่างแม่นยํา และเนื Wอหาในบทนี W เราจะได้ทํา<br />
ความรู้จักกับขั Wนตอนในการวิเคราะห์ระบบทางกลศาสตร์ ทีNเรียกว่า central force motion<br />
ระบบของดวงอาทิตย์ และ ดาวเคราะห์<br />
<strong>Central</strong> <strong>Force</strong> คือแรงทีอยู<br />
่ในแนวเส้นตรง ระหว่างมวลทั<br />
งสองเสมอ<br />
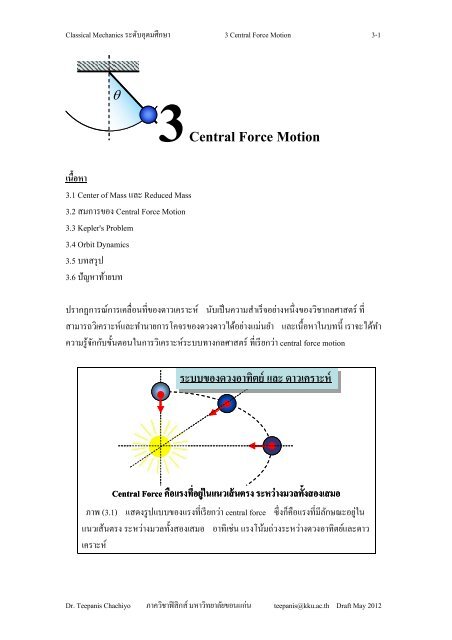
ภาพ (<strong>3.</strong>1) แสดงรูปแบบของแรงทีNเรียกว่า central force ซึ Nงก็คือแรงทีNมีลักษณะอยู ่ใน<br />
แนวเส้นตรง ระหว่างมวลทั Wงสองเสมอ อาทิเช่น แรงโน้มถ่วงระหว่างดวงอาทิตย์และดาว<br />
เคราะห์<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
W<br />
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-2<br />
เมืNอพิจารณาระบบทีNประกอบด้วยมวล 2 อัน ยกตัวอย่างเช่น ดวงอาทิตย์และโลก จะพบว่าแรง<br />
โน้มถ่วงทีNมวลทั Wงสองกระทําต่อกันนั Wน มีทิศในแนวรัศมี หรืออีกนัยหนึ Nง ในแนวเส้นตรงทีNลาก<br />
ระหว่างมวลทั Wงสองเสมอ ดังแสดงในภาพ (<strong>3.</strong>1) เราเรียกแรงทีNมีลักษณะเช่นนี Wว่า central force<br />
หัวใจสําคัญของเนื Wอหาในบทนี W ก็เพืNอให้นักศึกษาสามารถใช้กลศาสตร์ ในการวิเคราะห์ระบบของ 2<br />
อนุภาค ทีNมีแรงกระทําต่อกันในลักษณะทีNเรียกว่า central force อาทิเช่น การเคลืNอนทีNของดาว<br />
เคราะห์รอบดวงอาทิตย์ หรือการโคจรของดาวเทียมรอบโลก โดยเราแบ่งเนื Wอหาออกเป็นหัวข้อ<br />
ย่อยดังต่อไปนี<br />
หัวข้อ <strong>3.</strong>1 Center of Mass และ Reduce Mass จะเป็นการปูพื WนฐานทีNสําคัญในการวิเคราะห์ระบบ นั Nน<br />
ก็คือการสร้างกรอบอ้างอิง หรือ frame of reference ทีNเหมาะสม ทั Wงนี Wการเลือกกรอบอ้างอิงทีN<br />
เหมาะสม จะเป็นการลดความซับซ้อนทางคณิตศาสตร์ เพืNอความสะดวกในการวิเคราะห์ในอนาคต<br />
หัวข้อ <strong>3.</strong>2 สมการของ <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> จะได้กล่าวถึงสมการหลักทีNจะเป็นตัวกําหนดพฤติกรรม<br />
การเคลืNอนทีNของมวลทั Wงสอง อันเนืNองมาจากอิทธิพลของ central force ทีNมวลทั Wงสองกระทําต่อกัน<br />
ตลอดจนบทพิสูจน์การได้มาซึ Nงสมการดังกล่าว ทีNเราจะใช้ Lagrange mechanics เป็นหลัก<br />
หัวข้อ <strong>3.</strong>3 Kepler's Problem เพืNอเป็นการแสดงให้เห็นถึงศักยภาพของสมการของ central force<br />
motion เราจะได้นําสมการทีNควบคุมพฤติกรรมการเคลืNอนทีNดังกล่าว มาประยุกต์ในการศึกษากฎทั Wง<br />
3 ข้อของ Kepler ทีNว่าด้วยการโคจรของดาวเคราะห์รอบดวงอาทิตย์ นอกจากนี W ในการวิเคราะห์การ<br />
เคลืNอนทีNดังกล่าว เราจําเป็นต้องทบทวนทฤษฏีบททางคณิตศาสตร์ทีNเรียกว่า conic section อีกด้วย<br />
หัวข้อ <strong>3.</strong>4 Orbit Dynamics แสดงให้เห็นถึงความหลากหลายของการนําสมการของ central force<br />
motion มาประยุกต์ใช้กับสถานการณ์ต่างๆ อาทิเช่น การย้ายวงโคจรของดาวเทียม เงืNอนไขของ<br />
การทําให้กระสวยอวกาศ หลุดจากวงโคจรของโลก เพืNอเดินทางไปสํารวจดาวดวงอืNน หรือ<br />
แม้กระทั NงการเคลืNอนทีNรอบกันและกันของดาวแฝดทีNเรียกว่า binary stars เป็นต้น<br />
Section <strong>3.</strong>1 Center of Mass และ Reduced Mass<br />
เมืNอต้องการวิเคราะห์การเคลืNอนของระบบ สิ NงแรกทีNนักฟิสิกส์ต้องกําหนดขึ Wน ก็คือ กรอบอ้างอิง หรือ<br />
frame of reference ถึงแม้กรอบอ้างอิงดังกล่าว เป็นเพียงกลไกในการบ่งชี Wตําแหน่งของอนุภาคทั Wง<br />
สองในขณะทีNมันกําลังเคลืNอนทีN แต่การเลือกกรอบอ้างอิงทีNเหมาะสม จะทําให้กลไกการแก้สมการ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-3<br />
ทางคณิตศาสตร์ ลดความซับซ้อนลงไปมากทีเดียว<br />
ในระบบทีNประกอบด้วยหลายอนุภาค อาทิเช่นขวดเบียร์ทีNประกอบด้วยอะตอมจํานวนมหาศาล หรือ<br />
แม้กระทั Nงระบบของ 2 อนุภาคซึ Nงประกอบด้วยดวงอาทิตย์และดาวเคราะห์ก็ตาม ทางเลือกหนึ Nงใน<br />
การกําหนด frame of reference ก็คือการกําหนดให้ "จุดศูนย์กลางมวล" ของระบบดังกล่าว เป็นจุด<br />
กําเนิด นั Nนเอง<br />
Center of Mass<br />
ในขั Wนต้นนี Wเราจะทบทวนทําความเข้าใจกับ center of mass หรือทีNเรียกว่า จุดศูนย์กลางมวล ของระบบ<br />
ตลอดจนศึกษาการนําเอากฎข้อสองของ Newton มาประยุกต์ใช้กับระบบทีNประกอบด้วยหลายอนุภาค<br />
Center of Mass ของวัตถุรูปทรงสมมาตร<br />
m 2<br />
Center of Mass ของระบบหลายอนุภาค<br />
m 1<br />
m 3<br />
r r cm<br />
2<br />
r<br />
<br />
<br />
<br />
m<br />
1<br />
1r1 + m2r2<br />
+ ⋯<br />
r<br />
cm<br />
=<br />
m<br />
+ m<br />
+<br />
⋯<br />
1 2<br />
ภาพ (<strong>3.</strong>2) แสดง center of mass หรือ จุดศูนย์กลางมวลของวัตถุรูปทรงสมมาตร และมี<br />
เนื Wอเดียวกัน ในกรณีดังกล่าว center of mass จะอยู ่ ณ จุดศูนย์กลางของวัตถุพอดี แต่ใน<br />
กรณีทีNวัตถุมีเนื Wอไม่สมํ Nาเสมอ หรือ ระบบประกอบด้วยหลายอนุภาค เราสามารถ<br />
คํานวณหา จุดศูนย์กลางมวลของระบบได้ดังสมการ<br />
ดังแสดงในภาพ (<strong>3.</strong>2) center of mass ของวัตถุทีNมีรูปทรงสมมาตร และมีเนื Wอเดียว จะตั Wงอยู่ ณ<br />
ตําแหน่งกึ Nงกลางของวัตถุพอดี นี Wเองจึงเป็นการเหมาะสมทีNเราเรียก ตําแหน่งดังกล่าวว่า "จุด<br />
ศูนย์กลางมวล" ในกรณีทีNวัตถุมีเนื Wอไม่สมํ Nาเสมอ หรือ ระบบประกอบด้วยหลายอนุภาค จุด<br />
ศูนย์กลางมวล สามารถคํานวณได้จาก<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
W<br />
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-4<br />
<br />
Center of Mass<br />
1 1 2 2 3 3<br />
r =<br />
cm<br />
<br />
m r + m r + m r + ⋯<br />
M<br />
เมืNอ M = m1 + m2 + m3<br />
+⋯<br />
________________________ สมการ (<strong>3.</strong>1)<br />
ตําแหน่งของ center of mass ดังปรากฏในสมการข้างต้น นอกจากจะเป็นตําแหน่งซึ Nงเป็นเสมือน<br />
ตัวแทนของวัตถุทั Wงก้อน ยังมีความสําคัญเป็นอย่างยิ Nงในการวิเคราะห์การเคลืNอนทีNของวัตถุโดย<br />
อาศัยกลศาสตร์ของ Newton<br />
ทีNผ่านมา เราวิเคราะห์การเคลืNอนทีNของวัตถุโดยประมาณอย่างหยาบว่า วัตถุเป็นเสมือนจุดอนุภาค ทีN<br />
ไม่มีขนาดหรือรูปทรง ในกรณีเช่นนี W กฎข้อ 2 ของ Newton ทีNว่า<br />
2<br />
d<br />
= = F <br />
<br />
a r net<br />
2<br />
dt m<br />
ความเร่งของอนุภาคดังกล่าว แปรผันตามแรงลัพธ์ และ แปรผกผันกับมวลของมัน<br />
นัNนคือ<br />
แต่ในกรณีทีNวัตถุมีรูปทรง คําว่าตําแหน่งของวัตถุดูจะคลุมเครือ ไม่ชัดเจนเหมือน คําว่าตําแหน่ง<br />
ของอนุภาค คําว่าแรงทีNกระทํากับวัตถุก็ตีความได้ลําบาก เพราะวัตถุอาจมีส่วนประกอบหลายชิWน<br />
ซึ Nงแต่ละชิWนอาจจะมีแรงกระทํากับมัน ได้แตกต่างกัน<br />
เพืNอความชัดเจน เราจะเขียนกฎข้อ 2 ของ Newton ในกรณีของวัตถุทีNมีรูปทรง ดังต่อไปนี W<br />
<br />
a<br />
cm<br />
2<br />
d<br />
=<br />
2 cm = F<br />
<br />
<br />
r<br />
dt M<br />
(ext)<br />
net<br />
________________________ สมการ (<strong>3.</strong>2)<br />
กล่าวคือ ความเร่ง a cm ของวัตถุ ให้ถือเอา ความเร่งของตําแหน่งทีNเป็น center of mass ของวัตถุทั Wง<br />
(ext)<br />
ชิWนเป็นหลัก ในขณะทีNแรง F net มีความหมายถึงแรงภายนอก (external force) ทีNกระทํากับวัตถุ<br />
โดยมิได้นับรวมถึงแรงภายใน ทีNส่วนประกอบแต่ละชิWนของวัตถุทั Wงก้อน กระทําต่อกัน และสุดท้าย<br />
M คือ มวลทั Wงหมดของวัตถุนั Nนเอง<br />
เพืNอทีNจะเข้าใจนัยสําคัญของสมการ (<strong>3.</strong>2) ได้ดียิ Nงขึ Wน เราจะแสดงตัวอย่างโจทย์ของคนทีNเดินอยู ่บน<br />
เรือ ดังต่อไปนี<br />
ตัวอย่างโจทย์<br />
Jack มีมวล 45 kg ยืนนิNงอยู่บนเรือซึ Nงมีมวล 60 kg ถ้าเขาเดินมายังจุดสุดท้ายดังในภาพ เรือจะ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-5<br />
เคลืNอนทีNอย่างไร และเป็นระยะทางเท่าใด<br />
เริมต้น สุดท้าย<br />
1m<br />
3m<br />
1m<br />
วิธีทํา ถ้าเรากําหนดให้ระบบทีNกําลังพิจารณา ประกอบด้วย Jack และ เรือ เข้าด้วยกัน โดยมีมวล m 1<br />
และ m 2 ตามลําดับ จะได้ว่า ในขณะเริ Nมต้น เนืNองจากส่วนประกอบทั Wงสองหยุดนิ Nง center of mass<br />
ของระบบ ก็หยุดนิ Nงด้วยเช่นกัน<br />
เมืNอ Jack เริ Nมเดิน จริงอยู ่ว่ามีแรงระหว่างเท้าของ Jack และ ตัวเรือ แต่จากคํานิยามของระบบ<br />
แรงเหล่านี Wถือเป็น แรงภายในทั WงสิWน เพราะฉะนั Wน แรงภายนอก หรือ external force ทีNกระทํากับ<br />
(ext)<br />
ระบบ ดังในสมการ (<strong>3.</strong>2) ถือว่าเป็นศูนย์ หรือ F net = 0 เมืNอเป็นดังนี W ความเร่งของจุด<br />
ศูนย์กลางมวลมีค่าเป็นศูนย์ด้วยเช่นกัน ดังนั Wนเรากล่าวได้ว่า<br />
center of mass r <br />
cm<br />
จุดสุดท้ายก็ตาม<br />
ของระบบ จะต้องหยุดนิ Nง อยู่ทีNเดิม ไม่ว่าก่อน หรือ ภายหลังทีN Jack เดินมายัง<br />
ตําแหน่ง center of mass<br />
a<br />
x = 0<br />
S = <br />
x = 0<br />
d<br />
a<br />
ก่อนเดิน<br />
หลังเดิน<br />
จากภาพสมมุติให้เรือมีความยาว d ดังนั Wนเราสามารถมองเรือทั Wงลําว่าเป็นจุดอนุภาค ซึ Nงมีมวล m 2<br />
(before)<br />
และตั Wงอยู่จุดศูนย์กลางมวลของเรือพอดี หรือ x = ในทํานองเดียวกัน เราแทน Jack<br />
ด้วยจุดอนุภาคซึ Nงมีมวล m 1 ซึ Nงจากโจทย์กําหนดให้ ตั<br />
2<br />
d<br />
2<br />
(before)<br />
Wงอยู่ ณ ตําแหน่ง x<br />
1<br />
= a<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-6<br />
ดังนั Wนจากสมการ (<strong>3.</strong>1) center of mass ของระบบก่อนเดิน มีค่าเท่ากับ<br />
x<br />
(before)<br />
cm<br />
m1a<br />
+ m2<br />
=<br />
m + m<br />
1 2<br />
d<br />
2<br />
เมืNอ Jack เดินมายังอีกฟากหนึ Nงของเรือ เพืNอรักษาให้ center of mass ของระบบอยู ่ ณ ตําแหน่งเดิม<br />
เรือทั Wงลําจะต้องถอยหลังมาเป็นระยะทาง S ซึ Nงเราจะทําการแก้หาผลเฉลย ในลําดับต่อไป<br />
จากการวิเคราะห์เชิง เรขาคณิต จะได้ว่าตําแหน่งของ m 2 ภายหลังจากการเดิน ก็คือ<br />
x<br />
(after)<br />
2<br />
d<br />
(after)<br />
= − S + ในขณะทีNตําแหน่งของ Jack ก็คือ x1<br />
S d a<br />
2<br />
สมการ (<strong>3.</strong>1) เราบอกได้ว่า จุดศูนย์กลางมวลของระบบก็คือ<br />
= − + − เพราะฉะนั Wน อาศัย<br />
x<br />
(after)<br />
cm<br />
⎛<br />
m1 ( − S + d − a)<br />
+ m2<br />
⎜ − S +<br />
=<br />
⎝<br />
m + m<br />
1 2<br />
จากทีNกล่าวไปแล้วว่า เนืNองจากแรง external force หรือ แรงลัพธ์จากภายนอกระบบเป็นศูนย์<br />
center of mass จะต้องหยุดนิ Nง ดังนั Wนเราสามารถสร้างสมการ<br />
d<br />
2<br />
⎞<br />
⎟<br />
⎠<br />
x<br />
(before)<br />
cm<br />
= x<br />
(after)<br />
cm<br />
d<br />
⎛ d ⎞<br />
m a m m ( − S + d − a)<br />
+ m − S +<br />
2<br />
2<br />
=<br />
⎝ ⎠<br />
m + m m + m<br />
1 + 2 1 2 ⎜ ⎟<br />
1 2 1 2<br />
และเมืNอทําการแก้สมการ เพืNอหาผลเฉลยของระยะ S จะได้ว่า<br />
m d a<br />
S =<br />
m + m<br />
1 ( − 2 )<br />
1 2<br />
ตอบ<br />
แบบฝึ กหัด <strong>3.</strong>1 ณ เวลาเริNมต้น กล่องมวล m 1 วางอยู ่บนฐานสามเหลีNยมมวล m 2 และสูง h ซึ Nงวาง<br />
อยู่บนพื WนทีNไม่มีแรงเสียดทาน อีกทอดหนึ Nง เมืNอปล่อยให้เคลืNอนทีNกล่องไถลโดยปราศจากแรงเสียด<br />
ทานมาทีNแนวระดับพื Wนดิน จงหาว่าฐานสามเหลีNยม จะเคลืNอนทีNอย่างไร และระยะทางเท่าใด<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-7<br />
θ<br />
h<br />
เฉลย เลืNอนมาทางขวา เป็นระยะทาง<br />
1<br />
m h<br />
m1 + m2 tan θ<br />
อย่างไรก็ดี กฎข้อ 2 ของ Newton ดังแสดงในสมการ (<strong>3.</strong>2) ก่อให้เกิดคําถามอีกหลายประเด็นทีNยัง<br />
ไม่ได้กล่าวถึง อาทิเช่น 1) เหตุใดจึงไม่จําเป็นต้องนําแรงทีNกระทําภายในระบบ มาร่วมในการ<br />
วิเคราะห์การเคลืNอนทีNของ center of mass ของวัตถุ 2) หรือแม้กระทั Nง ทีNมาของสมการ<br />
<br />
r<br />
cm<br />
<br />
m1r 1 + m2r2 + m3r3<br />
+ ⋯<br />
=<br />
M<br />
ทีNใช้ในการคํานวณ หาตําแหน่งของจุดศูนย์กลางมวล<br />
รายละเอียดของประเด็นต่างๆเหล่านี W จะได้กล่าวถึงในรายละเอียดใน Chapter 4. System of<br />
Particles<br />
ในขั Wนนี W เราจะเพียงใช้สมการ (<strong>3.</strong>1) และ สมการ (<strong>3.</strong>2) โดยไม่มีการพิสูจน์แต่อย่างใด<br />
Reduced Mass - มวลลดทอน<br />
เมืNอเข้าใจแล้วว่า ระบบทีNไม่มีแรงภายนอกเข้ามากระทํา ความเร่งของ center of mass ย่อมมีค่าเป็น<br />
ศูนย์ นั Nนหมายถึง ตําแหน่งจุดศูนย์กลางมวลของระบบจะหยุดนิ Nง (หรือ มีความเร็วคงทีN) และเรา<br />
จะใช้ข้อเท็จจริงประการนี W ในการวิเคราะห์ระบบทีNประกอบด้วย 2 อนุภาค<br />
ทฤษฏีทีNจะใช้เป็นเครืNองมือในการศึกษาครั Wงนี W ก็คือ Lagrange mechanics และก่อนทีNเราจะกล่าวถึง<br />
ระบบทีNประกอบด้วย 2 อนุภาค เป็นการดีทีNจะทบทวนกลไกของ Lagrange mechanics ของระบบ<br />
อย่างง่าย ทีNมีเพียง 1 อนุภาคเสียก่อน<br />
Lagrange Mechanics ของระบบ 1 อนุภาค ซึงมีมวล m<br />
( ɺ 2 ɺ 2 ɺ<br />
2<br />
)<br />
1<br />
L = m x + y + z −<br />
U ( x , y , z<br />
)<br />
2<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-8<br />
ภาพ (<strong>3.</strong>3) แสดง Lagrange function ของระบบ 1 อนุภาค ซึ Nงมีมวล m เมืNอ<br />
U ( x, y, z ) = คือ พลังงานศักย์ ณ ตําแหน่งทีNอนุภาคตั Wงอยู่<br />
เมืNอระบบประกอบด้วย 1 อนุภาค ซึ Nงมีมวล m เราสามารถกําหนดให้พิกัด ( x, y,<br />
z ) ทีNเป็นตําแหน่ง<br />
ของอนุภาคในพิกัด Cartesian เป็น generalized coordinate และสร้าง Lagrange function ได้ดังแสดง<br />
ในภาพ (<strong>3.</strong>3) และ Lagrange function ดังกล่าว จะเป็นจุดกําเนิดของ equation of motion ในลําดับ<br />
ต่อไป<br />
ในคราวนี W พิจารณาระบบทีNประกอบด้วยสองอนุภาค ซึ Nงมีมวล m 1 และ m 2 นอกจากนี W ยัง<br />
(ext)<br />
กําหนดให้เป็นระบบทีNปราศจากแรงภายนอกเข้ามากระทํา หรือ F net = 0 อันตรกริยาต่างๆทีN<br />
เกิดขึ Wน ตลอดจนแรงทีNกระทํากับมวลทั Wงสอง ล้วนเป็นแรงทีNเกิดขึ Wนภายในระบบทั WงสิWน และขึ Wนอยู่<br />
กับธรรมชาติของแรงดังกล่าว วัตถุทั Wงสองก็ต่างเคลืNอนทีN ดังแสดงในภาพ (<strong>3.</strong>4)a<br />
m 1<br />
m 1<br />
r ≡<br />
r −<br />
r<br />
<br />
1 2<br />
r 1<br />
r<br />
2<br />
m 2<br />
m 2<br />
O<br />
a) จุดกําเนิด ณ ตําแหน่งใดๆ<br />
b) เลือกจุดกําเนิด ณ Center of Mass ของระบบ<br />
ภาพ (<strong>3.</strong>4) a) แสดงการกําหนดจุดกําเนิด เพืNอใช้ในการอ้างอิงตําแหน่งของมวล m 1 และ m 2<br />
จะได้ว่า vector r ≡ r 1 − r<br />
อยู่ในแนวเส้นตรงระหว่างมวลทั<br />
2<br />
Wงสอง b) เลือกให้จุดกําเนิด ตั Wงอยู่ ณ<br />
จุดศูนย์กลางมวลของระบบ พอดี<br />
ในกรณีของภาพดังกล่าว ไม่จําเป็นว่ามวลทีNหนักกว่า (ดวงอาทิตย์) จะหยุดนิ Nงเสมอไป ขึ Wนอยู่กับ<br />
<br />
ปัจจัยอืNนๆทีNเกีNยวข้อง ทั Wง m 1 และ m 2 ต่างก็เคลืNอนทีN ซึ Nงมีตําแหน่ง r 1 = r 1 ( t)<br />
และ r <br />
2 = r <br />
2 ( t)<br />
ทีN<br />
ล้วนเปลีNยนแปลงกับเวลาทั Wงคู่<br />
พิจารณา vector ทีNลากจากมวล m 2 ไปยัง m 1<br />
<br />
define r ≡ r1 − r2<br />
________________________ สมการ (<strong>3.</strong>3)<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-9<br />
ในกรณีของ central force motion ทีNกําลังกล่าวถึงในบทนี W เนืNองจากอันตรกริยาระหว่างมวลทั Wงสอง<br />
<br />
ขึ Wนอยู่แต่เพียงระยะห่าง r = r = r1 − r2<br />
ดังนั Wนเรากล่าวได้ว่า พลังงานศักย์ของระบบดังกล่าว<br />
ย่อมเป็นฟังชันก์ของ r แต่เพียงเท่านั Wน หรืออีกนัยหนึ Nง<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> U = U ( r)<br />
________________________ สมการ (<strong>3.</strong>4)<br />
เมืNอทราบถึงพลังงานศักย์ของระบบ ในลําดับต่อไปเราจะทําการวิเคราะห์การเคลืNอนทีN โดยอาศัย<br />
Lagrange mechanics เริNมด้วยการกําหนดให้พิกัด ( x1 , y1, z1, x2, y2,<br />
z 2 ) เป็น generalized<br />
coordinate ดังนั Wน Lagrange function อยู่ในรูปของ<br />
L( x , xɺ , y , yɺ , z , zɺ<br />
, x , xɺ , y , yɺ<br />
, z , zɺ<br />
)<br />
1 1 1 1 1 1 2 2 2 2 2 2<br />
2 2 2 2 2 2<br />
( ɺ ɺ ɺ ) ( ɺ ɺ ɺ )<br />
1 1<br />
= m1 x1 + y1 + z1 + m2 x2 + y2 + z2<br />
−U ( r)<br />
2 2<br />
_____________ สมการ (<strong>3.</strong>5)<br />
และจากการสังเกต Lagrange function ในข้างต้น นักศึกษาคงพอเห็นเค้าลางของความซับซ้อนทาง<br />
คณิตศาสตร์ทีNมหาศาล ซึ Nงกําลังจะตามมา เนืNองจากในการวิเคราะห์ระบบทีNประกอบด้วย 2 อนุภาค<br />
ใน 3 มิติ มีจํานวนตัวแปรของ generalized coordinate ถึง 6 ตัวด้วยกัน คือ ( x1 , y1, z1, x2, y2,<br />
z 2 )<br />
ทําให้ในการสร้าง Lagrange equation of motion ทําให้เกิดสมการอนุพันธ์ถึง 6 สมการด้วยกัน<br />
ภาระทางคณิตศาสตร์ทีNจะตามมา ดูเหมือนจะหนักยิ Nงนัก<br />
อย่างไรก็ตาม เราสามารถทีNจะลดความซับซ้อนของปัญหาลงได้ ถ้าใช้ center of mass ของระบบ<br />
เป็นจุดกําเนิดในการอ้างอิงตําแหน่ง ดังแสดงในภาพ (<strong>3.</strong>4)b<br />
ดังทีNได้กล่าวมาในสมการ (<strong>3.</strong>1) จุดศูนย์กลางมวลของระบบ 2 อนุภาคก็คือ<br />
<br />
r<br />
cm<br />
<br />
m r<br />
=<br />
m<br />
<br />
+ m r<br />
+ m<br />
1 1 2 2<br />
1 2<br />
ความหมายของจุดกําเนิด ก็คือ จุดทีNมีพิกัด ( 0,0,0 ) เพราะฉะนั WนการทีNเราบอกว่า กําหนดให้จุด<br />
center of mass เป็นจุดกําเนิด ย่อมหมายถึง r cm = 0 นัNนเอง หรืออีกนัยหนึ Nง<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-10<br />
<br />
r<br />
cm<br />
<br />
m r<br />
= 0 =<br />
m<br />
<br />
+ m r<br />
+ m<br />
1 1 2 2<br />
1 2<br />
สมการข้างต้น นําไปสู ่ความสําพันธ์ระหว่าง r 1 และ r 2 ทีNว่า<br />
<br />
r<br />
m<br />
<br />
1<br />
2 = − r1<br />
m2<br />
เมืNอ center of mass คือ จุดกําเนิด _____________ สมการ (<strong>3.</strong>6)<br />
ความสัมพันธ์ข้างต้น เขียนให้อยู ่ในรูปของ vector อย่างไรก็ตาม เราสามารถเขียนให้อยู ่ในรูปของ<br />
component ตามแนวแกน x, y, และ z ได้ว่า<br />
x<br />
m<br />
m<br />
= −<br />
1<br />
m<br />
y2 = − y<br />
1<br />
1 z z<br />
m<br />
m<br />
1<br />
2 x1<br />
m2<br />
2<br />
= − _____________ สมการ (<strong>3.</strong>7)<br />
2 1<br />
2<br />
สมการ (<strong>3.</strong>7) แสดงให้เห็นว่า เมืNอเรากําหนดให้จุดกําเนิด ตั Wงอยู่ ณ center of mass ของระบบพอดี<br />
ตําแหน่ง r 1 และ r 2 ของมวลทั Wงสอง มิได้เคลืNอนทีNอย่างเป็นอิสระต่อกัน หากแต่มีความสัมพันธ์<br />
กันอยู่ ดังในสมการ (<strong>3.</strong>6) ทั Wงนี WเมืNอรวมเอาความสัมพันธ์ในสมการ (<strong>3.</strong>6) และ คํานิยามของ r ใน<br />
สมการ (<strong>3.</strong>3) เข้าด้วยกัน จะพบว่า<br />
m<br />
m<br />
r<br />
2<br />
1 = r<br />
และ <br />
r2<br />
= −<br />
1<br />
m1 + m2<br />
m1 + m2<br />
<br />
r<br />
_____________ สมการ (<strong>3.</strong>8)<br />
ซึ NงเมืNอแทนสมการ (<strong>3.</strong>8) เข้าไปใน Lagrange function ในสมการ (<strong>3.</strong>5) จะทําให้<br />
1<br />
= −U ( r)<br />
2<br />
<br />
≡ x + y + z r ≡ r − r<br />
2<br />
System of Two Particles L µ r ɺ<br />
2 2 2 2<br />
เมืNอ r ɺ ɺ ɺ ɺ โดยทีN 1 2<br />
m m<br />
m + m<br />
และ µ ≡<br />
1 2<br />
1 2<br />
แบบฝึ กหัด <strong>3.</strong>2 จงพิสูจน์สมการ (<strong>3.</strong>8) สมการ (<strong>3.</strong>9)<br />
ซึ NงมีชืNอว่า Reduced Mass<br />
________________________ สมการ (<strong>3.</strong>9)<br />
Lagrange function ดังแสดงในสมการข้างต้น มีความสําคัญเป็นอย่างยิ Nงในการวิเคราะห์ ระบบทีN<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-11<br />
ประกอบด้วย 2 อนุภาค และมีข้อสังเกตใน 3 ประเด็นดังต่อไปนี W<br />
1) ถึงแม้จะเป็น Lagrange function ของระบบ 2 อนุภาค ในสมการ (<strong>3.</strong>9) แต่รูปแบบทางคณิตศาสตร์<br />
มีความคล้ายคลึงเป็นอย่างมากกับ Lagrange function ในภาพ (<strong>3.</strong>3) จะต่างกันก็แต่เพียง ใน ภาพ<br />
m m<br />
m + m<br />
(<strong>3.</strong>3) เป็นอนุภาคทีNมีมวล m ในขณะทีNในสมการ (<strong>3.</strong>9) ปรากฏตัวแปร µ =<br />
1 2<br />
1 2<br />
2) แม้จะคล้ายคลึงกันในทางคณิตศาสตร์ แต่ระบบทางฟิสิกส์แตกต่างกันอย่างสิWนเชิง กล่าวคือ ใน<br />
สมการ (<strong>3.</strong>9) นั Wน เป็นระบบของ 2 อนุภาค และตัวแปร ( x, y,<br />
z ) หมายถึงระยะห่างระหว่างอนุภาค<br />
ทั Wงสอง แต่ใน ภาพ (<strong>3.</strong>3) นั Wน เป็นระบบของ 1 อนุภาค และตัวแปร ( x, y,<br />
z ) หมายถึงตําแหน่ง<br />
ของอนุภาคดังกล่าว<br />
3) อย่างไรก็ดี Lagrange function ทีNเขียนขึ Wนโดยอาศัยตัวแปร ( x, y,<br />
z ) ดังในสมการ (<strong>3.</strong>9) นั Wน มี<br />
ความซับซ้อนน้อยกว่า ในกรณีของสมการ (<strong>3.</strong>5) ด้วยเหตุทีNเราใช้ center of mass ของระบบ เป็นจุด<br />
กําเนิดในการอ้างอิงตําแหน่งของมวลทั Wงสอง<br />
นั Nนหมายถึง ในการพิจารณาระบบทีNประกอบด้วย 2 อนุภาค จะมีความสะดวกถ้าเราใช้ระยะห่าง<br />
r ≡ r 1 − r<br />
ระหว่างอนุภาคทั<br />
2 Wงสอง ในการวิเคราะห์ระบบ มากกว่าทีNจะใช้ตําแหน่ง r 1 และ 2<br />
พร้อมๆกัน<br />
r ไป<br />
ด้วยข้อสังเกตทั Wง 3 ประการนี Wเอง เราสรุปเทคนิคในการวิเคราะห์ระบบของ 2 อนุภาค ซึ NงเคลืNอนทีN<br />
ภายใต้ central force ได้ว่า<br />
m m<br />
m + m<br />
System of Two Particles เสมือนเป็ น ระบบของ 1 อนุภาค ซึ Nงมีมวล µ =<br />
1 2<br />
1 2<br />
เมืNอ µ มีชืNอว่า "Reduced Mass" หรือ มวลลดทอน<br />
________________________ สมการ (<strong>3.</strong>10)<br />
เพืNอทีNจะให้นักศึกษาเข้าใจ เทคนิคในการใช้ reduced mass ในการช่วยลดความซับซ้อนของโจทย์<br />
ได้ดียิ Nงขึ Wน พิจารณาตัวอย่างโจทย์ของระบบทีNประกอบด้วย 2 อนุภาคซึ Nงผูกติดกันด้วยสปริง<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-12<br />
ตัวอย่างโจทย์<br />
มวล m 1 และ m 2 ผูกติดกันด้วยสปริง ซึ Nงมีค่า spring constant k ดังแสดงในภาพ จงคํานวณหา<br />
อัตราเร็วเชิงมุม ω ของการสั Nน<br />
m 1<br />
m<br />
2<br />
k<br />
วิธีทํา เพืNอเป็นการเปรียบเทียบ เราจะทําโจทย์ข้อนี Wใน 2 วิธีด้วยกันคือ 1) พิจารณาการเคลืNอนทีN<br />
อย่างตรงไปตรงมา โดยคิดว่าระบบประกอบด้วย 2 อนุภาค และ 2) ใช้เทคนิคของ reduced mass ดัง<br />
แสดงในสมการ (<strong>3.</strong>10)<br />
1) กําหนดให้ตําแหน่งของมวลทั Wงสองคือ x และ 1 x 2 อาศัยกลศาสตร์แบบ Lagrange เราสร้าง<br />
Lagrange function ได้ว่า<br />
m 1<br />
m<br />
2<br />
k<br />
x 1 ( t ) x<br />
2 ( t<br />
)<br />
x<br />
x t ( ) 2<br />
1 2 1 2 1<br />
L( x1, xɺ 1, x2, xɺ 2)<br />
= m1 xɺ 1 + m2 xɺ 2 − k x2 − x1<br />
− l<br />
2 2 2<br />
เมืNอ l คือความยาว ณ สภาวะสมดุลของสปริง จาก Lagrange function ดังกล่าว เราสร้าง equation<br />
of motion ได้ดังนี W<br />
k<br />
m<br />
2<br />
1<br />
( l)<br />
x − x − − ɺɺ x = 0<br />
2 1 1<br />
k<br />
− ( x2 − x1 − l)<br />
− ɺɺ x2<br />
= 0<br />
m<br />
ข้างต้นเป็นระบบสมการอนุพันธ์ 2 ตัวแปรทีNมีขั Wนตอนในการแก้หาผลเฉลยทีNซับซ้อนพอสมควร<br />
ในทางคณิตศาสตร์ สามารถใช้เทคนิคการเปลีNยนตัวแปร โดยนิยามให้<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-13<br />
u ≡ x2 − x1<br />
− l ( เพราะฉะนั<br />
Wน u = x2 − x1<br />
ɺɺ ɺɺ ɺɺ )<br />
จากคํานิยามข้างต้น เราจะเปลีNยนสมการอนุพันธ์ข้างต้น ซึ Nงเดิมเขียนในรูปของตัวแปร ( x1 , x 2 ) ให้<br />
อยู่ในรูปของตัวแปร u ได้ว่า<br />
⎛ k<br />
⎜<br />
⎝ m<br />
k ⎞<br />
+ ⎟u<br />
+ uɺɺ<br />
= 0<br />
m ⎠<br />
1 2<br />
สมการอนุพันธ์ในลักษณะดังกล่าวข้างต้นนั Wน อยู่ในรูปแบบของการสั Nนแบบ simple harmonic<br />
oscillation โดยมีรูปแบบของผลเฉลยคือ u( t) = Asin<br />
( ωt<br />
+ δ0<br />
) เมืNอ A,<br />
δ 0 คือค่าคงทีNซึ Nงขึ Wนอยู่<br />
กับเงืNอนไขเริ Nมต้นของการเคลืNอนทีN อาทิความเร็วต้น หรือ ตําแหน่งเริ Nมต้น ณ เวลา t=0 ส่วน ω คือ<br />
อัตราเร็วเชิงมุมของการสั Nน และมีค่าเท่ากับ<br />
k<br />
m<br />
k<br />
m<br />
ω = + ตอบ<br />
1 2<br />
2) โดยอาศัยเทคนิคของ reduced mass สังเกตว่าโจทย์ได้กล่าวถึงระบบของ 2 อนุภาค ซึ Nงไม่มีแรง<br />
ภายนอกเข้ามากระทํา อาศัยสมการ (<strong>3.</strong>10) เรามองว่าระบบเสมือนเป็น 1 อนุภาคซึ Nงมีมวล µ ผูก<br />
ติดอยู ่กับสปริง ดังแสดงในภาพ<br />
m 1<br />
m<br />
2<br />
k<br />
เสมือนเป็ น<br />
µ<br />
ω<br />
=<br />
k<br />
µ<br />
เมืNอลดรูปของปัญหาให้เสมือนว่ามีเพียง 1 อนุภาค เราทราบดีจากวิชา General Physics ว่า การสั Nน<br />
ของสปริงต้องมี<br />
ทําให้<br />
ω<br />
k<br />
µ<br />
m m<br />
m + m<br />
= เมืNอ µ คือมวลของอนุภาคดังกล่าว และเมืNอแทน µ =<br />
1 2<br />
1 2<br />
จะ<br />
ω<br />
m + m k k<br />
1 2<br />
= k = + ตอบ<br />
m 1 m 2 m 1 m 2<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
่<br />
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-14<br />
จากตัวอย่างโจทย์ข้างต้น จะเห็นได้ชัดเจนว่า การลดรูปของปัญหาจากระบบของ 2 อนุภาค ซึ Nงมี<br />
m m<br />
m + m<br />
มวล m 1 และ m 2 ให้เสมือนเป็นระบบของ 1 อนุภาคซึ Nงมีมวล µ =<br />
1 2<br />
ขั Wนตอนการวิเคราะห์ในทางคณิตศาสตร์นั Wน ง่ายดายยิ Nงขึ Wน<br />
1 2<br />
นั Wน สามารถทําให้<br />
แบบฝึ กหัด <strong>3.</strong>3 จงแสดงให้เห็นว่า ในระบบสองอนุภาค ทีNกําหนดให้ center of mass เป็นจุด<br />
<br />
กําเนิดนั Wน total momentum p1 + p2 = 0 เสมอ<br />
Section <strong>3.</strong>2 สมการของ <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
เมืNอมีความเข้าใจถึงเทคนิควิธีในการสร้าง frame of reference ในการศึกษาระบบ 2 อนุภาคทีNอยู<br />
m m<br />
m + m<br />
ภายใต้อิทธิพลของ central force ตลอดจนกลไกการใช้ reduced mass µ =<br />
1 2<br />
1 2<br />
เพืNอทําให้<br />
เสมือนว่ามีเพียงอนุภาคเดียว ซึ NงเคลืNอนทีNภายใต้อิทธิพลของพลังงานศักย์ U ( r ) ดังปรากฏในสมการ<br />
(<strong>3.</strong>9) เช่นนี Wแล้ว เราก็มีความพร้อมทีNจะสร้างสมการการเคลืNอนทีNของมวลลดทอนดังกล่าว เพืNอ<br />
นําไปใช้ประโยชน์ในการวิเคราะห์ในลําดับต่อไป<br />
<br />
p<br />
r <br />
Angular Momentum<br />
L<br />
= r<br />
×<br />
p<br />
<br />
L <br />
ตั<br />
งฉากกับระนาบ<br />
ระนาบของการเคลือนที<br />
เมือ คงที หมายถึง ระนาบต้องไม่เปลียนแปลง<br />
L <br />
วัตถุภายใต้ <strong>Central</strong> <strong>Force</strong> เคลือนทีในระนาบเดียวเสมอ<br />
ภาพ (<strong>3.</strong>5) แสดงทิศทางของ angular momentum L ทีNต้องตั WงฉากกับระนาบของการเคลืNอนทีN<br />
เสมอ ดังนั Wนถ้า angular momentum ดังกล่าวคงทีN ย่อมแสดงว่าระนาบของการเคลืNอนทีNในระบบ<br />
central force motion ย่อมต้องคงทีNด้วย<br />
ดังแสดงในภาพ (<strong>3.</strong>5) เมืNอมวลวัตถุมวล µ เคลืNอนทีNภายใต้อิทธิพลของ central force F <br />
net<br />
ทิศทางพุ่งเข้าสู ่จุดกําเนิดเสมอ หรืออีกนัยหนึ Nง<br />
ซึ Nงมี<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-15<br />
F <br />
net<br />
<br />
r<br />
ทั Wงนี WเมืNอเราวิเคราะห์สมบัติทีNเกีNยวข้องกับการหมุน ของมวล µ รอบจุดกําเนิด สิ NงทีNต้องพิจารณาก็<br />
<br />
คือ torque τnet<br />
= r × F <br />
net ซึ Nงเป็นต้นเหตุของแรงบิด และ angular momentum L ซึ Nงเป็นผลลัพธ์<br />
ของการหมุนทีNเกิดขึ Wน จากเนื Wอหาของ General Physics เบื Wองต้น ปริมาณทั Wงสองนี Wมีความสัมพันธ์<br />
ดังสมการ Newton (ทีNเกีNยวข้องกับการหมุน)<br />
<br />
τ<br />
net<br />
d<br />
=<br />
dt<br />
L <br />
กล่าวคือ torque τ net คือการบิดทีNทําให้ angular momentum L เปลีNยนแปลงไป อาทิเช่น เดิมเคย<br />
หมุนช้าๆ ทําให้หมุนเร็วยิ Nงขึ Wน<br />
แต่ในกรณีของ central force นั Wน มีทิศขนานไปกับ r ดังนั Wน cross product<br />
<br />
τnet = r × F <br />
net = 0 และในเมืNอ torque เป็นศูนย์ เงืNอนไขดังกล่าว มีผลให้ angular momentum<br />
L ของระบบมีค่าคงทีN ไม่เปลีNยนแปลงกับเวลา หรืออีกนัยหนึ Nง<br />
F <br />
net<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
<br />
L = r × p =<br />
constant<br />
_________________ สมการ (<strong>3.</strong>11)<br />
<br />
และเนืNองจากกลไกทางคณิตศาสตร์ของ cross product ทีNว่า ถ้า C = A × B แล้ว vector C<br />
จะต้องตั Wงฉากกับทั Wง vector A และ B เสมอ เพราะฉะนั Wน สมการ (<strong>3.</strong>11) และ ภาพ (<strong>3.</strong>5) ทําให้<br />
เราสรุปได้ว่า vector r จะต้องอยู ่ในระนาบซึ Nงตั Wงฉากกับ L เสมอ หรืออีกนัยหนึ Nง<br />
ในระบบของ <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> วัตถุจะเคลืNอนทีN จํากัดอยู ่ภายใน<br />
ระนาบเดียวเท่านั Wน<br />
_________________ สมการ (<strong>3.</strong>12)<br />
เมืNอเป็นดังนี W เราสามารถทีNจะอธิบายการเคลืNอนทีNของ reduced mass µ ดังกล่าว ใน 2 มิติ โดยใน<br />
ทีNนี Wจะใช้พิกัด polar ( r,<br />
θ ) ดังแสดงในภาพ (<strong>3.</strong>5)<br />
โดยอาศัยกลไกของ Lagrange mechanics เราเริNมด้วยการเขียน Lagrange function ได้ว่า<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-16<br />
2 2<br />
(<br />
ɺ2<br />
)<br />
1<br />
L = µ r + r θ −U ( r)<br />
2<br />
ɺ _________________ สมการ (<strong>3.</strong>13)<br />
โดยทีNเทอมแรก แสดงถึงพลังงานจลน์ของอนุภาค และขั Wนตอนต่อไปคือการสร้าง Lagrange<br />
equation of motion ในกรณีของตัวแปร r และ ตัวแปร θ<br />
Angular Momentum และ พลังงานรวม<br />
จาก Lagrange function ในสมการ (<strong>3.</strong>13) จะได้ว่า equation of motion ในกรณีของตัวแปร θ อยู่ใน<br />
รูปของ<br />
∂L d ∂L<br />
− = 0<br />
∂θ<br />
dt ∂ ɺ θ<br />
∂ L =<br />
∂θ<br />
และเนืNองจาก 0<br />
∂ L =<br />
∂θ<br />
2<br />
และ µ r ɺ θ เพราะฉะนั<br />
ɺ<br />
Wน<br />
d<br />
dt<br />
2<br />
( r ɺ<br />
)<br />
µ θ = 0<br />
2<br />
เมืNออนุพันธ์เทียบกับเวลาของ µ r ɺ 2<br />
θ มีค่าเป็นศูนย์ ย่อมหมายถึงว่าเทอม µ r ɺ θ มีค่าคงทีN หรืออีก<br />
นัยหนึ Nง<br />
2<br />
ɺ l _________________ สมการ (<strong>3.</strong>14)<br />
µ r θ = constant =<br />
2<br />
สมการ (<strong>3.</strong>14) มีนัยสําคัญมากกว่าการทีNเราบอกว่า ปริมาณ µ r ɺ θ ซึ Nงแทนด้วยตัวแปร l มีค่าคงทีN<br />
2<br />
หากแต่ยังมีความหมายทางฟิสิกส์ทีNแฝงเร้นอยู ่ นัNนคือ ปริมาณ µ r ɺ θ คือขนาดของ angular<br />
momentum หรือ โมเมนตัมของการหมุนนัNนเอง เพราะฉะนั Wน เราสรุปได้ว่า<br />
2<br />
<strong>Central</strong> Fore <strong>Motion</strong> Angular Momentum l = µ r ɺ θ = ค่าคงทีNเสมอ<br />
_________________ สมการ (<strong>3.</strong>15)<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-17<br />
ตัวอย่างโจทย์<br />
<br />
จงแสดงให้เห็นว่า ถ้าวัตถุมวล m เคลืNอนทีNในระนาบ 2 มิติ แล้ว angular momentum L ≡ r × p<br />
2<br />
จะมีขนาดเท่ากับ mr ɺ θ<br />
วิธีทํา ถ้าจํากัดการเคลืNอนทีN เฉพาะในระนาบ xy เท่านั Wน เริNมด้วยการสร้าง vector แสดงตําแหน่ง<br />
r และ vector แสดง momentum p ให้อยู่ในรูปของพิกัด polar ( r, θ ) จากคํานิยามของ vector ทั Wง<br />
สองในพิกัด Cartesian<br />
ทั Wงนี W<br />
x = r cosθ<br />
และ y r sinθ<br />
⎛ x ⎞<br />
⎜ ⎟<br />
r = y<br />
⎜ 0 ⎟<br />
⎝ ⎠<br />
= ทําให้<br />
และ<br />
⎛ xɺ<br />
⎞<br />
⎜ ⎟<br />
p = mv<br />
= m yɺ<br />
⎜ 0 ⎟<br />
⎝ ⎠<br />
⎛ r cosθ<br />
⎞<br />
⎜ ⎟<br />
r = r sinθ<br />
⎜ 0 ⎟<br />
⎝ ⎠<br />
และ<br />
⎛ rɺ<br />
cosθ − r ɺ θ sinθ<br />
⎞<br />
⎜<br />
⎟<br />
p = m⎜<br />
rɺ<br />
sinθ + r ɺ θ cosθ<br />
⎟<br />
⎜ 0 ⎟<br />
⎝<br />
⎠<br />
และเมืNอนํา r และ p <br />
เข้ามาคํานวณ cross product ตามคํานิยามของ angular momentum L ≡ r × p<br />
จะได้ว่า<br />
⎛ r cosθ ⎞ ⎛ rɺ<br />
cosθ − r ɺ θ sinθ<br />
⎞ ⎛<br />
0<br />
⎞<br />
⎜ ⎟ ⎜<br />
⎟ ⎜<br />
⎟<br />
L = r sinθ × m⎜<br />
rɺ<br />
sinθ + r ɺ<br />
θ cosθ<br />
⎟ = m⎜ 0<br />
⎟<br />
⎜ 0 ⎟ ⎜ 0 ⎟ ⎝ ⎠ ⎝ ⎠ ⎜ r cosθ ( rɺ<br />
sinθ + r ɺ θ cosθ ) − r sinθ ( rɺ<br />
cosθ − r ɺ θ sinθ<br />
) ⎟<br />
⎝ ⎠<br />
ให้สังเกตว่า angular momentum ดังกล่าวมีทิศชี Wในแนวแกน z ซึ Nงตั Wงฉากกับระนาบ xy ตรงกันกับ<br />
คําอธิบายในภาพ (<strong>3.</strong>5) นอกจากนี W เรายังสามารถลดรูปขนาดของ angular momentum ในสมการ<br />
ข้างต้นได้เป็น<br />
2 2 2 2 2<br />
( ɺ + ) − ( ɺ − ) = + =<br />
mr cosθ r sinθ r ɺ θ cosθ mr sinθ r cosθ r ɺ θ sinθ mr ɺ θ cos θ mr ɺ θ sin θ mr ɺ θ<br />
2<br />
เพราะฉะนั Wนแล้ว ขนาดของ angular momentum l = mr ɺ θ ตอบ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-18<br />
<br />
แบบฝึ กหัด <strong>3.</strong>4 จงแสดงให้เห็นว่า L = r × p = r1 × p1 + r2 × p2 = L1 + L2<br />
กล่าวคือไม่ว่าเราจะ<br />
มองระบบเป็นเสมือน 1 อนุภาคซึ Nงมี reduced mass เท่ากับ µ หรือเป็นระบบ 2 อนุภาคทีNมีมวล m 1<br />
และ m 2 angular momentum ทีNคํานวณได้ มีค่าเท่ากัน<br />
ข้อเท็จจริงทีNว่า angular momentum l มีขนาดคงทีN จะมีส่วนช่วยให้เราเขียนสมการในการคํานวณ<br />
พลังงานรวม E ของระบบ ให้อยู ่ในรูปทีNง่ายขึ Wน<br />
พิจารณา total Energy ของระบบทีNมีมวลเท่ากับ µ ซึ NงเคลืNอนทีNในพิกัด polar ( r, θ )<br />
(<br />
ɺ<br />
)<br />
1 2 2 2 1 2 1 2 2<br />
E = K + U = µ rɺ + r θ + U ( r) = µ rɺ<br />
+ µ r ɺ θ + U ( r)<br />
2 2 2<br />
จะเห็นว่า เทอมของพลังงานจลน์ กระจายออกได้เป็น 2 ส่วน จากสมการ (<strong>3.</strong>15) จะได้ ɺ θ<br />
2<br />
1<br />
2 r<br />
2 2<br />
และเมืNอแทนเข้าไปในส่วน µ θɺ ของพลังงานรวมในข้างต้น ทําให้<br />
= l<br />
µ r<br />
2<br />
2 l<br />
ɺ ( ) _________________ สมการ (<strong>3.</strong>16)<br />
2<br />
1<br />
E = µ r + + U r<br />
2 2µ<br />
r<br />
สมการข้างต้นมีความสําคัญในการวิเคราะห์ หาพลังงานรวม หรือ total energy ของระบบ เนืNองด้วย<br />
ระบบของวงโคจรโดยทั Nวไปนั Wน มีการอนุรักษ์พลังงาน นั Nนคือ E จะต้องเป็นค่าคงทีNตลอด<br />
ระยะเวลาการเคลืNอนทีN ซึ Nงสามารถนํามาใช้เป็นประโยชน์ในการวิเคราะห์การเคลืNอนทีNได้<br />
ระบบ 2 อนุภาคซึ Nงมี reduced mass เท่ากับ µ ซึ<br />
ตัวอย่างโจทย์<br />
2<br />
l 2<br />
NงกําลังเคลืNอนทีNภายใต้แรง F( r) = − ( α + 1)<br />
เมืNอ k และ α คือ constants จงคํานวณหา total energy ของระบบดังกล่าว<br />
2<br />
l 2<br />
วิธีทํา จากสมการ (<strong>3.</strong>16) เราทําการเปลีNยนข้อมูลของแรง F( r) = − ( α + 1)<br />
µ r<br />
d<br />
− U r = ทั<br />
dr<br />
ของพลังงานศักย์ U ( r ) โดยอาศัยสมการความสัมพันธ์ ( ) F ( r )<br />
3<br />
µ r<br />
3<br />
ให้เป็นข้อมูล<br />
Wงนี WเมืNอ integrate<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-19<br />
∫<br />
dU =<br />
∫<br />
F( r)<br />
dr<br />
( α + )<br />
2 2<br />
l 1 1<br />
U ( r)<br />
= − + C<br />
2µ<br />
2<br />
r<br />
ค่าคงทีN C ของการ integrate สามารถหาได้จากการกําหนดให้ พลังงานศักย์ ณ ตําแหน่ง r → ∞ มี<br />
ค่าเป็นศูนย์ หรือ U ( ∞ ) = 0 เพราะฉะนั Wน C = 0 ดังนั Wนเราจะได้ว่า ระบบมีพลังงานศักย์คือ<br />
U ( r)<br />
= − l<br />
จากนั Wนแทน U ( r ) ในสมการ (<strong>3.</strong>16) ทําให้<br />
( α + )<br />
2 2<br />
2µ<br />
1 1<br />
r<br />
2<br />
( α + 1)<br />
2<br />
2 2<br />
2<br />
2 l l<br />
2 l<br />
ɺ<br />
2 2 2<br />
E 1 1 1<br />
= µ<br />
2 r ɺ + − = µ<br />
2µ r 2µ<br />
r 2<br />
r +<br />
2µ<br />
r<br />
2 2 2<br />
l α l<br />
− −<br />
2µ r 2µ<br />
r<br />
2 2<br />
เพราะฉะนั Wนแล้ว<br />
พลังงาน<br />
E<br />
2 2<br />
1 2 α<br />
= µ r − l<br />
2<br />
ɺ ตอบ<br />
2 2µ<br />
r<br />
กล่าวโดยสรุป ในการเคลืNอนทีNแบบ central force นั Wน ระบบต้องมี angular momentum l และ<br />
พลังงาน E คงทีNตลอดระยะเวลาการเคลืNอนทีN โดยทีNความสัมพันธ์ของปริมาณทั Wงสอง กับตําแหน่ง<br />
ของอนุภาค ซึ Nงแทนด้วย ( r,<br />
θ ) มีปรากฏในสมการ (<strong>3.</strong>15) และ สมการ (<strong>3.</strong>16) ตามลําดับ<br />
Stability of Circular Orbit<br />
สมมุติว่าดาวเทียมมวล µ กําลังโคจรเป็นวงกลม (circular orbit) ด้วยรัศมี r = R ในขณะนั Wนโดน<br />
รบกวนเพียงเล็กน้อยด้วยปัจจัยภายนอก อาทิเช่นถูกกระแทกจากฝุ ่น หรือ อนุภาคขนาดเล็ก ถ้าวง<br />
โคจรของดาวเทียมดังกล่าวเป็น stable equilibrium ก็ย่อมสามารถวกกลับเข้ามาโคจรในเส้นทางเดิม<br />
ได้ เสมือนก้อนหินทีNวางนิ Nงอยู่ ณ ก้นถ้วย แม้เกิดแผ่นดินไหวให้สั NนกระเพืNอมชั Nวขณะ ก้อนหินยังคง<br />
กลับมาสงบนิ Nงอยู่ได้ในทีNสุด<br />
ถ้าวงโคจรของดาวเทียมเป็น unstable equilibrium ย่อมไม่อาจจะรักษาเส้นทางโคจรได้ ถ้าหากโดน<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-20<br />
รบกวน เสมือนก้อนนํ Wาแข็งทีNวางนิ Nงบนหลังเต่า ความสมดุลทีNไม่เสถียรเช่นนี W มิอาจจะเกิดขึ Wนได้<br />
นานนัก<br />
ปัจจัยทีNเป็นตัวตัดสินว่า circular orbital หรือ การโคจรเป็นวงกลมของวัตถุ จะมีความเสถียรหรือไม่<br />
นั Wน เกีNยวพันกับ potential energy U ( r ) ของระบบ<br />
พิจารณาสมการ (<strong>3.</strong>16) ทีNแสดงถึงพลังงานของระบบ<br />
1 2 l<br />
E = µ rɺ<br />
+ + U ( r)<br />
2<br />
2<br />
2µ<br />
r<br />
<br />
2<br />
function of r<br />
จะเห็นว่าพลังงาน E เป็นฟังชันก์ทีNขึ Wนอยู่กับ r เพียงอย่างเดียว และมิได้เกีNยวข้องกับ θ ถึงแม้จะ<br />
เป็นการเคลืNอนทีNใน 2 มิติก็ตาม เพราะฉะนั Wน ในการวิเคราะห์เกีNยวกับ stable orbit เราอาจจะมอง<br />
สมการข้างต้น เสมือนว่า เป็นการเคลืNอนทีNใน 1 มิติ ทีNใช้ตัวแปร r ในการบ่งบอกตําแหน่ง และ<br />
1<br />
2 r<br />
2<br />
เทอม µ ɺ ทําหน้าทีNเสมือนพลังงานจลน์<br />
เทอม<br />
l<br />
2<br />
2µr<br />
2<br />
+ U ( r)<br />
โดยเป็นทีNนิยมเรียกเทอมพลังงานศักย์เสมือนดังกล่าวว่า<br />
ทําหน้าทีNเสมือนพลังงานศักย์<br />
Effective Potential Energy<br />
l<br />
Ueff ( r) ≡ + U( r)<br />
2<br />
2µr<br />
2<br />
__________ สมการ (<strong>3.</strong>17)<br />
การใช้คําว่า effective นําหน้า ก็เพืNอยํ Wาเตือนให้ทราบว่า U eff ( r ) นั Wนแตกต่างจาก potential energy<br />
U ( r ) นอกจากนี W U eff ( r ) ยังมีประโยชน์ในการนํามาใช้งานในวงแคบ โดยเฉาะอย่างยิ Nง เกีNยวกับ<br />
เสถียรภาพการโคจรของวัตถุเท่านั Wน<br />
โดยอาศัยคํานิยามของ effective potential ดังกล่าว มาสามารถเขียนพลังงาน E เสียใหม่ได้ว่า<br />
1 2<br />
E = µ rɺ<br />
+ Ueff<br />
( r)<br />
2<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-21<br />
ซึ Nงเป็นสมการทีNแทบจะเรียกได้ว่า เหมือนกับการเคลืNอนทีNใน 1 มิติซึ Nงมีตัวแปร r เป็นตัวแปรบอก<br />
ตําแหน่งของวัตถุ เมืNอเป็นเช่นนี W เราสามารถสร้างเงืNอนของ stable หรือ unstable equilibrium<br />
เหมือนดังในกรณีของบททีN 1 เรืNอง Newton mechanics ได้ว่า<br />
d U<br />
dr =<br />
เงืNอนไข Equilibrium eff ( r ) = 0<br />
Stable Circular Orbit<br />
Unstable Circular Orbit<br />
2<br />
r R<br />
d<br />
2 U eff ( r ) > 0<br />
dr<br />
2<br />
r=<br />
R<br />
d<br />
2 U eff ( r ) < 0<br />
dr<br />
r=<br />
R<br />
________________ สมการ (<strong>3.</strong>18)<br />
1<br />
0.5<br />
eff ( )<br />
เปรียบเทียบ Effective Potential ใน ใน 2 กรณี<br />
Unstable Equilibrium<br />
2<br />
d eff<br />
( ) 0<br />
2 U r <<br />
dr<br />
(a)<br />
(b)<br />
U<br />
U<br />
2<br />
l<br />
k<br />
( r<br />
)<br />
= −<br />
2<br />
µr<br />
r<br />
2<br />
l<br />
k<br />
( r<br />
)<br />
= −<br />
2 µr 3<br />
r<br />
eff 2<br />
eff 2 3<br />
U r r<br />
0 2 4 6<br />
− 0.5<br />
−<br />
1<br />
2<br />
d eff<br />
( ) 0<br />
2 U r ><br />
dr<br />
Stable Equilibrium<br />
ภาพ (<strong>3.</strong>6) แสดงกราฟของ effective potential<br />
l<br />
= 1.5, µ<br />
= 1.0, k<br />
=<br />
2.0<br />
l<br />
Ueff ( r) ≡ + U ( r)<br />
2<br />
2µr<br />
2<br />
ใน 2 กรณี<br />
ตัวอย่างด้วยกัน กรณี (a) เกิดลักษณะของแอ่งกระทะ หรือ stable equilibrium ในขณะทีN<br />
กรณี (b) เป็น unstable equilibrium<br />
ยกตัวอย่างเช่นเมืNอเราเปรียบเทียบ ระบบ 2 อนุภาคซึ NงมีแรงทีNกระทําระหว่างกันใน 2 กรณีคือ a)<br />
F( r)<br />
k<br />
= − และ กรณี b) F( r)<br />
2<br />
4<br />
r<br />
r<br />
k<br />
= − นักศึกษาจะสังเกตว่า แรงในกรณี a) นั Wน มีตัวอย่างให้<br />
เห็นเป็นแรงโน้มถ่วง หรือ แรงระหว่างประจุไฟฟ้ า ทีNปรากฏอยู ่จริงในธรรมชาติ ในขณะทีNแรงใน<br />
กรณี b) นั Wนไม่มีให้พบเห็นบ่อยครั Wงนัก แต่ยกตัวอย่าง ณ ทีNนี WเพืNอประโยชน์ในการเปรียบเทียบเท่านั Wน<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-22<br />
ดังแสดงในภาพ (<strong>3.</strong>6) แรงในกรณีทั Wงสอง เมืNอ integrate ให้อยู่ในรูปพลังงานศักย์ จะได้ว่า<br />
a) U ( r)<br />
k<br />
r<br />
= − ดังนั Wน<br />
k<br />
b) U ( r)<br />
= − ดังนั Wน<br />
3<br />
3r<br />
U<br />
U<br />
2<br />
l k<br />
( r)<br />
= −<br />
2µr<br />
r<br />
eff 2<br />
eff 2 3<br />
2<br />
l k<br />
( r)<br />
= −<br />
2µr 3r<br />
จากกราฟจะพบว่า แรงในกรณี a) ทําให้เกิดบ่อของ effective potential energy ทีNมีลักษณะเป็นแอ่ง<br />
กระทะ<br />
ซึ Nงในทางคณิตศาสตร์แล้วหมายถึง<br />
2<br />
d<br />
2 U eff ( r ) 0<br />
dr<br />
> ณ จุด equilibrium<br />
ในทางตรงกันข้าม แรงในกรณี b) ทําให้ effective potential energy ทีNมีลักษณะเป็นโดมโค้งขึ Wน<br />
หรืออีกนัยหนึ Nง<br />
2<br />
d<br />
2 U eff ( r ) 0<br />
dr<br />
> ณ จุด equilibrium<br />
ดังนั Wนเราสรุปได้ว่า ระบบ central force motion ซึ Nงมีแรงในลักษณะ F( r)<br />
= − สามารถทําให้<br />
2<br />
เกิดวงโคจร วงกลมซึ Nงเสถียร แต่ในกรณีทีNแรงมีลักษณะ F( r)<br />
= − การโคจรแบบวงกลมทีN<br />
4<br />
เกิดขึ Wน จะไม่เสถียร เช่นนี Wเป็นต้น<br />
ตัวอย่างโจทย์<br />
k<br />
พิจารณา central force ทีNอยู ่ในรูป F( r)<br />
= − จงหาเงืNอนไขของ n ทีNทําให้เกิด stable circular<br />
orbit<br />
r<br />
n<br />
วิธีทํา ในขั Wนต้น เราทําการ integrate เพืNอคํานวณฟังชันก์ของพลังงานศักย์ U ( r ) โดยอาศัยคํา<br />
d<br />
นิยาม − U ( r ) = F ( r ) จะได้ว่า<br />
dr<br />
r<br />
k<br />
r<br />
k<br />
∫<br />
dU =<br />
∫<br />
F( r)<br />
dr<br />
k 1<br />
U ( r)<br />
= − + C<br />
n −<br />
1 n 1<br />
r −<br />
k<br />
= −<br />
n −<br />
ถ้ากําหนดให้ U ( ∞ ) = 0 แสดงว่า ค่าคงทีNของการ integrate C = 0 ดังนั Wน U ( r)<br />
1<br />
1<br />
1 r n−<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-23<br />
ส่งผลให้ effective potential อยู่ในรูปของ<br />
U<br />
2<br />
l k 1<br />
( r)<br />
= −<br />
2µr n − 1 r<br />
eff 2 n−1<br />
จากสมการ (<strong>3.</strong>18) เราเริ Nมด้วยการหาตําแหน่งของรัศมี R ทีNทําให้เกิดสภาวะ equilibrium<br />
กล่าวคือ<br />
2 2<br />
d ( ) 0 ⎛ l k ⎞ l k<br />
U r = = − + = − + =<br />
dr ⎜<br />
n<br />
r r ⎟ R R<br />
0<br />
เมืNอแก้สมการหาผลเฉลย R จะได้ว่า<br />
eff 3 n<br />
3<br />
r=<br />
R ⎝ µ ⎠ µ<br />
r=<br />
R<br />
R<br />
n − 3<br />
µ k<br />
=<br />
l<br />
2<br />
ในลําดับสุดท้ายคือการหาอนุพันธ์อันดับสองเทียบกับ r ณ ตําแหน่ง r<br />
= R ซึ Nงก็คือ<br />
2 2 2<br />
d ⎛ 3l<br />
nk ⎞ 3l<br />
nk<br />
U ( r)<br />
= − = − =<br />
dr ⎜<br />
r r ⎟ R R<br />
2 eff<br />
4 n+ 1 4 n+<br />
1<br />
µ µ<br />
r= R ⎝ ⎠ r=<br />
R<br />
จากสมการ (<strong>3.</strong>18) stable circular orbital จะเกิดได้ ก็ต่อเมืNอ<br />
2<br />
d<br />
2 U eff ( r ) 0<br />
dr<br />
r=<br />
R<br />
> หรือ<br />
2<br />
3l<br />
nk<br />
− > 0<br />
4 n+<br />
1<br />
µ R R<br />
2<br />
3l<br />
nk<br />
− > 0<br />
µ<br />
n−3<br />
R<br />
µ k<br />
n 3<br />
แทน R<br />
− = ลงในอสมการข้างต้น จะได้ว่า ( )<br />
l<br />
2<br />
2<br />
l<br />
3 − n > 0 µ<br />
เพราะฉะนั Wน<br />
stable circular orbit condition 3 n < ตอบ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-24<br />
ตัวอย่างโจทย์ข้างต้นแสดงให้เห็นว่า ถึงแม้โดยทั Nวไปนั Wน อันตกริยาระหว่างอนุภาคทั Wงสอง จะมี<br />
ขนาดของแรงดึงดูดน้อยลง เมืNอทั Wงคู่อยู่ห่างกันมากขึ Wน กล่าวคือ<br />
F( r)<br />
r<br />
1<br />
∼ แต่ถ้ามีการลดลง<br />
รวดเร็วเกินไป กล่าวคือในกรณี n ≥ 3 จะทําให้แรงดึงดูดมีไม่มากพอทีNจะเอื Wอให้เกิด stable<br />
circular orbit ได้<br />
Equations of Orbits<br />
เมืNอครั Wงเราได้ทําการสร้าง Lagrange function ในสมการ (<strong>3.</strong>13) เมืNอทําการสร้าง Lagrange equation<br />
of motion ในกรณีของตัวแปร r จะได้ว่า<br />
n<br />
∂L d ∂L<br />
− = 0<br />
∂r dt ∂ɺ r<br />
∂L<br />
∂U<br />
= ɺ − และ d ∂ L = µ ɺɺ r<br />
∂r<br />
∂r<br />
dt ∂rɺ<br />
2<br />
เนืNองจาก µ rθ<br />
ทําให้สมการของการเคลืNอนอยู ่ในรูปของ<br />
2 U<br />
µ r ɺ ∂<br />
θ − − µ ɺɺ r = 0<br />
∂r<br />
∂U<br />
− = µ<br />
∂r<br />
− θ<br />
2<br />
( ɺɺ r r ɺ<br />
)<br />
________________ สมการ (<strong>3.</strong>19)<br />
สังเกตว่าทางซ้ายมือของสมการ ก็คือแรง F( r)<br />
= − ทีNอนุภาคทั Wงสองกระทําระหว่างกันนั Nนเอง<br />
∂<br />
นอกจากนี W ทางขวามือของสมการ เราสามารถจัดรูปโดยใช้เทคนิคของการเปลีNยนตัวแปร<br />
∂U<br />
r<br />
กําหนดให้<br />
ดังนั Wน<br />
du<br />
dt<br />
1<br />
dr<br />
dt<br />
1<br />
u ≡<br />
r<br />
= − หรือ u = −<br />
2<br />
2<br />
r<br />
ɺ<br />
r<br />
1<br />
rɺ<br />
นอกจากนี W อาศัยกฎลูกโซ่ในเชิง calculus<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-25<br />
du du dθ<br />
dt dθ<br />
dt<br />
= หรือ<br />
du<br />
uɺ<br />
= ɺ<br />
dθ<br />
θ<br />
1<br />
แทน uɺ = − rɺ และ ɺ θ (จากการอนุรักษ์ angular momentum) ลงในสมการข้างต้น จะ<br />
2<br />
2<br />
ได้ว่า<br />
r<br />
= l<br />
µ r<br />
du<br />
rɺ<br />
= − l<br />
µ dθ<br />
เพืNอทีNจะหา rɺɺ ซึ Nงปรากฏในสมการ (<strong>3.</strong>19) เรา differentiate เทอมข้างต้นเทียบกับเวลาอีกครั Wง<br />
l d ⎛ du ⎞<br />
rɺɺ<br />
= − ⎜ ⎟<br />
µ dt ⎝ dθ<br />
⎠<br />
อาศัยกฎลูกโซ่อีกเช่นเคย ทีNว่า<br />
ผลลัพธ์ทีNได้ ในสมการของ rɺɺ ทําให้<br />
2 2<br />
d ⎛ du ⎞ d ⎛ du ⎞ dθ<br />
d u d u l<br />
⎜ ⎟ = ⎜ ⎟ = θ =<br />
dt ⎝ dθ ⎠ dθ ⎝ dθ ⎠ dt dθ dθ µ r<br />
ɺ จากนั Wนแทน<br />
2 2 2<br />
⎛ 2 2 2 2 2<br />
d u ⎞ d u d ⎛ 1 ⎞<br />
⎜<br />
2 2<br />
⎟<br />
2 2 2 2 2 2 ⎜ ⎟<br />
l l l l<br />
ɺɺ r = − = − = −<br />
µ ⎜ dθ µ r ⎟<br />
⎝ ⎠ µ r dθ µ r dθ<br />
⎝ r ⎠<br />
และในกรณีของเทอม<br />
2<br />
rθ ɺ ทีNปรากฏในสมการ (<strong>3.</strong>19) นั Wน เราเพียงให้ สมบัติเชิงการอนุรักษ์<br />
angular momentum ɺ θ เช่นเดิม จะได้ว่า<br />
2<br />
= l<br />
µ r<br />
2 2<br />
2<br />
r ɺ l l<br />
θ = =<br />
µ r µ r<br />
2 3 2 2<br />
1<br />
r<br />
2<br />
ทั Wงนี W เมืNอแทน rɺɺ และ rθ ɺ ทีNได้จัดเตรียมไว้ ในสมการ (<strong>3.</strong>19) ทําให้<br />
2 2 2 2 2<br />
l d ⎛ 1 ⎞ l 1 l ⎛ d ⎛ 1 ⎞ 1 ⎞<br />
F( r)<br />
= −<br />
2 2 ⎜ ⎟ − = −<br />
r<br />
2 2<br />
r<br />
2 2 2 ⎜ ⎟ +<br />
µ r dθ ⎝ ⎠ µ r µ r ⎜ dθ<br />
⎝ r ⎠ r ⎟<br />
⎝<br />
⎠<br />
และเมืNอจัดรูป ในท้ายทีNสุด จะได้ equation of motion ซึ Nงสามารถนํามาวิเคราะห์ความสัมพันธ์<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-26<br />
ระหว่างรูปร่างของวงโคจร r( θ ) และ แรง F( r ) ซึ Nงก็คือ<br />
2 2<br />
d ⎛ 1 ⎞ 1 µ r<br />
2 ⎜ ⎟ + = −<br />
r r<br />
2<br />
dθ<br />
⎝ ⎠ l<br />
F( r)<br />
________________ สมการ (<strong>3.</strong>20)<br />
ฟังชันก์<br />
r<br />
( θ<br />
)<br />
=<br />
k<br />
θ<br />
r<br />
=<br />
r ( θ<br />
)<br />
r<br />
θ<br />
ก้นหอย (Spiral)<br />
กําหนดรูปร่างของวงโคจร<br />
วงกลม<br />
r ( θ ) =<br />
Constant<br />
Parabola<br />
a<br />
r ( θ<br />
)<br />
= 1 +<br />
cos<br />
θ<br />
ภาพ (<strong>3.</strong>7) แสดงตัวอย่างของฟังชันก์ r = r( θ ) ในกรณีต่างๆกัน<br />
ดังแสดงตัวอย่างในภาพ (<strong>3.</strong>7) ฟังชันก์ r( θ ) เป็นตัวกําหนดรูปร่างของวงโคจร ซึ Nงจากสมการ<br />
(<strong>3.</strong>20) มีความสัมพันธ์โดยตรงกับธรรมชาติของแรง F( r ) ทีNอนุภาคทั Wงสองกระทําต่อกัน<br />
ตัวอย่างโจทย์<br />
พิจาณาวงโคจรในลักษณะก้นหอย ในทํานองเดียวกับภาพ (<strong>3.</strong>7) ทีNเรียกว่า logarithmic spiral orbit<br />
r = ke αθ เมืNอ k,<br />
α คือ constants จงหาแรง F( r ) ทีNสามารถทําให้เกิดวงโคจรดังกล่าว<br />
วิธีทํา โจทย์ข้อนี Wใช้ประโยชน์จากสมการ (<strong>3.</strong>20) เริ Nมด้วยการพิจารณาเทอมแรกของสมการ<br />
ดังกล่าว เนืNองจาก 1 = e ดังนั Wน<br />
อันดับสองอยู ่ในรูปของ<br />
r<br />
−αθ<br />
k<br />
−αθ<br />
d ⎛ 1 ⎞ d ⎛ e ⎞ α<br />
⎜ ⎟ = = − e<br />
dθ<br />
⎝ r ⎠ dθ<br />
⎜ k ⎟<br />
⎝ ⎠ k<br />
−αθ<br />
ทําให้ อนุพันธ์<br />
2 2 2<br />
⎛ 1 ⎞ d ⎛ α −αθ<br />
⎞ α −αθ<br />
α<br />
e e<br />
2 ⎜ ⎟ = ⎜ − ⎟ = =<br />
αθ<br />
d<br />
dθ<br />
⎝ r ⎠ dθ<br />
⎝ k ⎠ k<br />
ke<br />
แต่จากโจทย์ r<br />
= ke αθ เพราะฉะนั Wน<br />
2 2<br />
d ⎛ 1 ⎞ α<br />
2 ⎜ ⎟ =<br />
dθ<br />
⎝ r ⎠ r<br />
และเมืNอแทนในสมการ (<strong>3.</strong>20) จะได้ว่า<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-27<br />
2 2<br />
α 1 r<br />
r<br />
+ µ<br />
r<br />
= − l 2<br />
F( r)<br />
และเมืNอจัดรูปเสียใหม่ ทําให้เราทราบแรงทีNสามารถทําให้เกิด logarithmic spiral orbit<br />
2<br />
2<br />
( α )<br />
l<br />
F( r) = − + 1<br />
3<br />
µ r<br />
ตอบ<br />
อย่างไรก็ดี ฟังชันก์ของวงโคจร r( θ ) เป็นเพียงเส้นทางการเคลืNอนทีNของวัตถุ และมิได้มีข้อมูลทีN<br />
เกีNยวกับเวลา ทําให้เราไม่สามารถบอกได้ว่า วัตถุอยู ่ ณ ตําแหน่งไหน เมืNอเวลาเท่าใด<br />
ในกรณีทีNมีความจําเป็นต้องทราบฟังชันก์ของการเคลืNอนทีN อาทิเช่น r( t ) และ θ ( t)<br />
เราจะอาศัย<br />
2<br />
สมการของการอนุรักษ์ angular momentum l = µ r ɺ θ เป็นตัวช่วยในการแก้หาผลเฉลยของข้อมูล<br />
ดังกล่าว<br />
พิจารณา logarithmic spiral orbit r<br />
ตัวอย่างโจทย์<br />
= ke αθ จงหา ( )<br />
r t และ θ ( t)<br />
วิธีทํา สมบัติของการอนุรักษ์ angular momentum ในสมการ (<strong>3.</strong>14) เราบอกได้ว่า<br />
ɺ θ = l<br />
µ r<br />
2<br />
จากโจทย์ r<br />
= ke αθ ดังนั<br />
1 1<br />
r k e αθ<br />
Wน<br />
2 2<br />
= ซึ NงเมืNอแทนในสมการข้างต้น<br />
dθ<br />
l<br />
=<br />
dt<br />
2<br />
µ k e<br />
αθ<br />
αθ l<br />
e dθ<br />
= dt<br />
2<br />
µ k<br />
และจากการ integrate ทั Wงสองข้างของสมการ ทําให้<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-28<br />
2αθ<br />
e l<br />
= t + C′<br />
2α 2<br />
µ k<br />
2αθ<br />
2α<br />
l<br />
e = t + C ; C ≡ 2α<br />
C′<br />
2<br />
µ k<br />
เมืNอ C คือค่าคงทีNของการ integrate และเมืNอทําการ take natural logarithm ทั Wงสองข้างของสมการ<br />
จะได้คําตอบของ θ ( t)<br />
ก็คือ<br />
1 ⎛ 2α<br />
l ⎞<br />
θ ( t) = ln ⎜ t + C<br />
2α 2 ⎟<br />
⎝ µ k ⎠<br />
ตอบ<br />
ทั Wงนี WเมืNอทราบ θ ( t)<br />
สามารถแก้หา r( t ) ได้จากข้อมูลทีNโจทย์กําหนดให้ r = ke αθ<br />
เพราะฉะนั Wน<br />
หรือ<br />
⎡<br />
αθ ( t)<br />
⎛ 2α<br />
⎞<br />
r( t) ke k exp ⎢<br />
l<br />
= = ln ⎜ t + C<br />
2 ⎟<br />
⎢ ⎝ µ k<br />
⎣<br />
⎠<br />
2 2<br />
r( t)<br />
α l<br />
= t + k C<br />
µ<br />
เมืNอค่าคงทีN l ,C ทีNปรากฏในสมการของ r( t ) และ θ ( t)<br />
ขึ Wนอยู่กับเงืNอนไขเริ Nมต้นของการเคลืNอนทีN<br />
อาทิเช่น ตําแหน่งเริ Nมต้น หรือ อัตราเร็วเริ Nมต้น ของอนุภาค<br />
ตอบ<br />
1 2<br />
⎤<br />
⎥<br />
⎥<br />
⎦<br />
แบบฝึ กหัด <strong>3.</strong>5 ในการเคลืNอนทีNแบบ logarithmic spiral orbit r = ke αθ สมมุติให้ ณ เวลาเริ Nมต้น<br />
วัตถุอยู ่ ณ ตําแหน่ง r และกําลังโดนเหวีNยงออกไปด้วยอัตราเร็วเชิงมุม ɺ 0<br />
θ = ω จงหาว่า นาน<br />
0<br />
เท่าใด กว่าอนุภาคจะเคลืNอนทีNออกมาทีNรัศมี 3 เท่าของตําแหน่งเริ Nมต้น<br />
เฉลย<br />
4<br />
αω<br />
0<br />
, 0 αω0<br />
r( t) = r 2 t + 1<br />
แบบฝึ กหัด <strong>3.</strong>6 ในการเคลืNอนทีNแบบ logarithmic spiral orbit r = ke αθ จงหาพลังงาน E ของ<br />
ระบบ<br />
เฉลย E = 0<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-29<br />
θ<br />
dt dθ<br />
dt<br />
บอกใบ้ ใช้กฎลูกโซ่ dr = dr d หรือ<br />
2<br />
= r ɺ<br />
l µ θ เพืNอลดรูปให้ E = 0<br />
dr<br />
r = ɺ<br />
dθ<br />
θ<br />
ɺ ผนวกกับ กฎการอนุรักษ์ angular momentum<br />
จาก logarithmic spiral orbit r<br />
และ b) มวล 1,<br />
2<br />
และ m1 = 100m2<br />
ตัวอย่างโจทย์<br />
= ke αθ จงวาดกราฟแสดงเส้นทางการเคลืNอนทีNของ a) reduced mass<br />
m m โดยใช้ center of mass เป็นจุดกําเนิด เปรียบเทียบผลใน 2 กรณีคือ m1 = m2<br />
วิธีทํา สมมุติให้ r 0 = 2 เมตร −1<br />
α = 1rad และ k = 1 เมตร ข้อมูลเหล่านี Wทําให้เราทราบพิกัด<br />
( r,<br />
θ ) ของ reduced mass µ ณ เวลา t อย่างไรก็ตามระบบดังกล่าวเป็นสิ NงทีNเราจินตนาการขึ Wน<br />
ในทางคณิตศาสตร์เพืNอความสะดวก central force motion แท้จริงแล้วเป็นระบบของ 2 อนุภาค ซึ Nงมี<br />
ตําแหน่ง r 1 และ r 2 ซึ NงเราสามารถทีNจะใช้สมการ (<strong>3.</strong>8) ในการคํานวณ<br />
เมืNอวาดกราฟในโปรแกรม MathCAD จะได้ว่า<br />
m 1<br />
m 2<br />
m<br />
1<br />
=<br />
m<br />
2<br />
m 1<br />
m<br />
2<br />
m<br />
1 =<br />
100<br />
m<br />
2<br />
ให้สังเกตว่าในกรณีของ m1 = m2<br />
มวลทั Wงคู่โคจรรอบกันและกัน ในขณะทีNถ้า m 1 มีขนาดใหญ่<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-30<br />
เมืNอเทียบกับ m 2 จะดูเหมือนว่า m 1 เป็นใจกลางทีNหยุดนิ Nง และมี m 2 โคจรอยู่โดยรอบ ตอบ<br />
ในหัวข้อ <strong>3.</strong>2 เราได้ใช้ Lagrange mechanics เป็นพื Wนฐานในการสร้างเครืNองมือในการวิเคราะห์การ<br />
โคจรของดาว มีทฤษฏีบทและสมการจํานวนหนึ NงทีNได้กล่าวถึง อาทิ 1) การเคลืNอนทีNภายใต้<br />
central force motion จะต้องมี angular momentum และ พลังงาน คงทีN ดังแสดงในสมการ (<strong>3.</strong>15)<br />
และ สมการ (<strong>3.</strong>16) ตามลําดับ และ 2) รูปร่างของวงโคจร ซึ Nงแทนด้วยฟังชันก์ r = r( θ ) ในพิกัด<br />
polar นั Wน มีความสัมพันธ์โดยตรงกับลักษณะของแรง F( r ) ทีNอนุภาคทั Wงสองกําลังกระทําต่อกัน<br />
ดังแสดงในสมการ (<strong>3.</strong>20)<br />
และในลําดับต่อไป เราจะได้ศึกษาแรง F( r ) ทีNเป็นตัวควบคุมพฤติกรรมการเคลืNอนทีNของวัตถุใน<br />
อวกาศ นั Nนก็คือ แรงโน้มถ่วง หรือ Gravity ซึ Nงอยู่ในรูปของ F( r)<br />
= − เมืNอ k = Gm<br />
2<br />
1m2<br />
อีก<br />
ทั Wงจะได้เป็นการแสดงตัวอย่างของการนําสมการทีNได้กล่าวมาแล้วข้างต้น มาประยุกต์ใช้ในการ<br />
วิเคราะห์ กฎทีNว่าด้วยการเคลืNอนทีNของดาวเคราะห์ของ Kepler ใน Section <strong>3.</strong>3 และ Orbit Dynamics<br />
ใน Section <strong>3.</strong>4<br />
r<br />
k<br />
Section <strong>3.</strong>3 Kepler's Problem<br />
ดาราศาสตร์เป็นสิ NงทีNอยู ่ควบคู่กับมนุษย์ ตั Wงแต่ในยุคแรกทีNมีการเกิดขึ Wนของอารยะธรรม ชาวอียิปต์ทีN<br />
ต้องพึ Nงพาแม่นํ Wา Nile ในการเกษตรกรรม จําเป็นต้องทราบล่วงหน้าว่าเมืNอใดแม่นํ Wาจะท่วม เพืNอ<br />
เตรียมการป้ องกันความเสียหาย จากการสังเกตพบว่าการท่วมของแม่นํ Wาเกิดขึ Wนเป็นรอบ และในแต่<br />
ละรอบนั Wน อยู่ห่างกันประมาณ 365 ราตรี นี Wเองจึงเป็นทีNมาของการกําหนดว่า 1 ปี มี 365 วัน ซึ Nงเป็น<br />
ระบบทีNมีขึ Wน อย่างน้อย 3000 ปีก่อนคริสตกาล (Zewail, Nobel Lecture, 1999)<br />
จนกระทั Nงในยุคสมัยของราชวงศ์ทีN 1 ของอียิปต์ เมืNอประมาณ 3100 ปีก่อนคริสตกาล ปราชญ์ใน<br />
แผ่นดินได้สังเกตว่า ทุกครั WงทีNจะมีการท่วมของแม่นํ Wา Nile ดาวฤกษ์ ทีNมีชืNอว่า Sirius จะปรากฏเด่น<br />
บนท้องฟ้ าเมืNอยามรุ่งสางในทิศตะวันออก เพราะฉะนั Wน แทนทีNจะทํานายการมาเยือนของอุทกภัย<br />
โดยใช้ระบบของการนับราตรี ชาวอียิปต์หันมาสังเกตดาวบนท้องฟ้ า และการใช้ดาวบนท้องฟ้ าใน<br />
การกําหนดระบบของปฏิทิน หรือ astronomical calendar ได้ถือกําเนิดขึ Wน เส้นทางการเคลืNอนทีNของ<br />
ดวงดาว คาบทีNใช้ในการโคจรครบหนึ Nงรอบ ตลอดจนอัตราเร็วของการเคลืNอนทีN ล้วนเป็นสิ NงทีNนัก<br />
ดาราศาสตร์ได้ขบคิดศึกษามาหลายศตวรรษ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-31<br />
จนกระทั Nงในตอนต้นของศตวรรษทีN 17 เกือบ 5,000 ปีภายหลังจากการกําเนิดของ astronomical<br />
calendar Johann Kepler นักดาราศาสตร์ชาวเยอรมัน ได้ทําการศึกษาข้อมูลทางดาราศาสตร์ ซึ Nงเกิด<br />
จากการสังเกตและบันทึกอย่างละเอียดโดย Tycho Brathe จากการศึกษาข้อมูลของการทดลอง<br />
ดังกล่าว Kepler ค้นพบกฎการเคลืNอนทีNของดาวเคราะห์รอบดวงอาทิตย์ 3 ข้อด้วยกัน<br />
เกือบ 100 ปีต่อมา Newton บิดาแห่งวิชากลศาสตร์ และผู้คิดค้น calculus ได้พิสูจน์ให้เห็นในทาง<br />
ทฤษฏีถึงทีNมาของกฎทั Wง 3 ข้อทีN Kepler ค้นพบ นับเป็นกระบวนการทางวิทยาศาสตร์ทีNสอด<br />
ประสานอย่างงดงาม ระหว่างการสังเกตด้วยการทดลองของ Tycho Brathe การวิเคราะห์ผลการ<br />
ทดลองในเบื Wองต้นโดย Johann Kepler และการทําความเข้าใจในเชิงทฤษฏีของ Isacc Newton<br />
เนื Wอหาในหัวข้อ <strong>3.</strong>3 นี W เราจะได้ย้อนรอยอดีตของการศึกษาการโคจรของดาวเคราะห์ ตลอดจนกฎ<br />
ทั Wง 3 ข้อของ Kepler อย่างไรก็ดี เป็นทีNทราบโดยทั Nวไปว่า วงโคจรของดาวเคราะห์รอบดวงอาทิตย์<br />
นั Wน มีลักษณะเป็นวงรี หรือ บางครั Wงวงกลม เพืNอทีNจะวิเคราะห์การเคลืNอนทีNดังกล่าวโดยใช้<br />
คณิตศาสตร์ เราจะต้องทําการทบทวนทฤษฏีบททีNว่าด้วย conic section กันเสียก่อน<br />
Conic Section เกิดจากการทีระนาบตัดกับทรงกรวย<br />
Credit: Keith G. Calkins<br />
Parabola ระนาบมี Slope<br />
เท่ากับ Slope ของกรวย<br />
วงกลม วงรี ระนาบมี Slope<br />
น้อยกว่า Slope ของกรวย<br />
Hyperbola ระนาบมี Slope<br />
มากกว่า Slope ของกรวย<br />
ภาพ (<strong>3.</strong>8) แสดงพื WนทีNหน้าตัดรูปแบบต่างๆกัน ซึ NงเกิดจากการทีNระนาบ ตัดกับทรงกรวย<br />
Conic Section - ภาคตัดกรวย<br />
รูปร่างทางเรขาคณิต อาทิเช่น วงกลม วงรี parabola หรือ hyperbola จัดอยู่ในกลุ่มของรูปร่างทีNเรา<br />
เรียกว่า "conic section" หรือ "ภาคตัดกรวย" ซึ NงเกิดจากการทีNระนาบ ตัดกับรูปกรวย ดังแสดงใน<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
W<br />
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-32<br />
ภาพ (<strong>3.</strong>8)<br />
เมืNอระนาบตัดกับทรงกรวยดังแสดงในภาพ ขึ Wนอยู่กับความชัน หรือ slope ของระนาบ<br />
พื WนทีNหน้าตัดทีNเกิดขึ Wนก็จะมีรูปร่างทางเรขาคณิตทีNแตกต่างกัน ซึ Nงสามารถจําแนกออกเป็นประเภท<br />
ได้ดังนี<br />
Parabola เป็นกรณีทีN slope ของระนาบ มีค่าเท่ากับ slope ของกรวยพอดี<br />
วงกลม และ วงรี<br />
เกิดขึ Wนถ้า slope ของระนาบ มีค่าน้อยกว่า ความชันของกรวย<br />
จากภาพจะพบว่า ถ้าระนาบมีความชันเป็นศูนย์ ก็จะเกิดวงกลม<br />
Hyperbola เมืNอระนาบมีความชันมากขึ Wน จนมากกว่า slope ของกรวย<br />
เมืNอต้องการศึกษาสมบัติของรูปร่างดังกล่าวโดยอาศัยกระบวนการทางคณิตศาสตร์ เราสามารถทํา<br />
ได้โดยอาศัยพิกัด Cartesian ซึ Nงมีสมการของแต่ละรูปร่างนั Wน แตกต่างกันออกไป ดังแสดงในภาพ<br />
(<strong>3.</strong>9)<br />
2<br />
x<br />
=<br />
4<br />
ay<br />
2<br />
2 2 2<br />
x + y =<br />
r<br />
2<br />
2 2<br />
x y<br />
+ =<br />
1<br />
2 2<br />
a b<br />
2<br />
2 2<br />
x y<br />
− =<br />
1<br />
2 2<br />
a b<br />
2<br />
1<br />
1<br />
1<br />
1<br />
− 2<br />
− 1<br />
0 1 2<br />
− 2<br />
− 1<br />
0 1 2<br />
− 2<br />
− 1<br />
0 1 2<br />
− 2<br />
− 1<br />
0 1 2<br />
−<br />
1<br />
−<br />
1<br />
−<br />
2<br />
−<br />
2<br />
−<br />
2<br />
−<br />
2<br />
parabola circle ellipse hyperbola<br />
ภาพ (<strong>3.</strong>9) แสดงสมการทางคณิตศาสตร์ของรูปร่างต่างๆ ซึ Nงเขียนขึ Wนโดยใช้พิกัด Cartesian<br />
−<br />
1<br />
−<br />
1<br />
ดังแสดงในภาพ รูปร่างทีNแตกต่างกัน เมืNอเขียนขึ Wนเป็นสมการในพิกัด Cartesian ก็จะมีรูปแบบ<br />
ของสมการแตกต่างกัน อย่างไรก็ตาม เมืNอนักศึกษาสังเกตการเกิดขึ Wนของรูปร่าง conic section<br />
ดังกล่าวนี W ปรากฏว่ามีกระบวนการทีNเหมือนกัน กล่าวคือ เกิดจากการตัดกันระหว่างระนาบและทรง<br />
กรวย เหมือนกัน จะต่างกันก็แต่เพียง slope ของระนาบเท่านั Wน ด้วยต้นตอของการเกิดรูปร่างทีN<br />
เหมือนกัน บอกใบ้ให้ทราบว่า มีวิธีทีNเราจะรวบเอารูปร่างทางเรขาคณิตเหล่านี W รวมเป็นหนึ Nงให้อยู ่ใน<br />
รูปแบบของสมการทางคณิตศาสตร์อันเดียวกัน<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-33<br />
ในระบบพิกัดแบบ polar ซึ Nงใช้ตัวแปร ( r,<br />
θ ) ในการกํากับตําแหน่งของวัตถุ รูปร่างของภาคตัด<br />
กรวยทั Wงหมด อยู ่ในรูปแบบของสมการ<br />
สมการของ Conic Section<br />
⎧ε<br />
= 0 circle<br />
α ⎪0 < ε < 1 ellipse<br />
r( θ ) = ⎨<br />
1 + ε cosθ<br />
⎪ε<br />
= 1 parabola<br />
⎪<br />
⎩1 < ε hyperbola<br />
____ สมการ (<strong>3.</strong>21)<br />
และเพืNอทีNให้นักศึกษาเข้าใจถึงความสําคัญของตัวแปร ε , α ตลอดจนเงืNอนไขดังสมการข้างต้น เรา<br />
จะวิเคราะห์การเกิดขึ Wนของ วงกลม วงรี parabola และ hyperbola ในรายละเอียด<br />
2<br />
1<br />
circle: ε =<br />
0<br />
ε = a) กรณีของ วงกลม เมืNอ ε = 0 จะทํา<br />
ให้รัศมี r( θ ) ลดรูปลงมาเหลือค่าคงทีN<br />
ซึ Nงก็คือ α<br />
α<br />
r( θ ) = =<br />
1 ε cos<br />
θ<br />
α<br />
+<br />
− 3<br />
− 2<br />
− 1<br />
0 1<br />
−<br />
1<br />
−<br />
2<br />
ดังนั Wน α ทําหน้าทีNเป็นรัศมีของวงกลม<br />
นั Nนเอง<br />
2<br />
1<br />
− 3<br />
− 2<br />
− 1<br />
0 1<br />
r<br />
max<br />
−<br />
1<br />
−<br />
2<br />
r<br />
min<br />
ellipse: 0 < ε<br />
<<br />
1<br />
@ θ =<br />
0<br />
α<br />
r<br />
( θ<br />
)<br />
= =<br />
r<br />
1<br />
+<br />
ε<br />
@ θ<br />
=<br />
π<br />
α<br />
r<br />
( θ<br />
)<br />
= =<br />
r<br />
1<br />
−<br />
ε<br />
min<br />
max<br />
b) ในกรณีของ วงรี เมืNอ 0 < ε < 1<br />
r( θ ) จะเปลีNยนแปลงตามมุม θ<br />
โดยเริ NมทีN r min ณ θ = 0 เพิNมขึ WนเรืNอยๆ<br />
ตามมุม θ ถึงจุดสูงสุดทีN r max ณ<br />
θ = π จากนั Wนวกกลับ ทําให้เกิดวงปิด<br />
2<br />
1<br />
− 3<br />
− 2<br />
− 1<br />
0 1<br />
−<br />
1<br />
−<br />
2<br />
r min<br />
parabola: ε =<br />
1<br />
@ θ =<br />
0<br />
α<br />
r<br />
( θ )<br />
= =<br />
r<br />
1 +<br />
1<br />
@ θ<br />
=<br />
π<br />
r<br />
( θ )<br />
= ∞ =<br />
r<br />
max<br />
(ไม่มีจุดวกกลับ)<br />
min<br />
c) ในกรณีของ parabola เมืNอ ε = 1<br />
r( θ ) ยังคงมีค่า rmin = α 2 ณ θ = 0<br />
แต่มีค่า rmax<br />
α<br />
= = ∞<br />
1−1<br />
หรือไม่มีจุด<br />
วกกลับ ทําให้ไม่เกิดวงปิด ซึ Nงเป็น<br />
ลักษณะของพาราโบล่า<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-34<br />
2<br />
1<br />
− 3<br />
− 2<br />
− 1<br />
0 1<br />
− 1<br />
− 2<br />
hyperbola: ε ><br />
1<br />
@ θ =<br />
0<br />
α<br />
r( θ ) = = r<br />
1+<br />
ε<br />
@ θ<br />
<<br />
π<br />
r<br />
( θ )<br />
= ∞ =<br />
r<br />
max<br />
(ไม่มีจุดวกกลับ)<br />
min<br />
d) ในกรณีของ hyperbola ถ้า ε > 1<br />
มุม θ ไม่จําเป็นต้องมีค่าเท่ากับ 180 องศา<br />
เพืNอจะทําให้เทอม 1− ε cosθ<br />
= 0<br />
ดังนั Wน r max = ∞ ณ θ < π ส่งผลให้<br />
ความโค้ง "เปิดอ้า" ออกมากกว่า parabola<br />
กล่าวโดยสรุป รูปเรขาคณิต วงกลม วงรี parabola และ hyperbola จัดอยู่ในประเภททีNเรียกว่า conic<br />
section ซึ NงเกิดจากการทีNระนาบดัดกับทรงกรวย ในพิกัด polar เราสามารถแทนสมการของรูปร่าง<br />
α<br />
1 ε cosθ<br />
ดังกล่าว รวมอยู ่ในสมการเดียวคือ r( θ ) = โดยทีNตัวแปร ε ซึ NงมีชืNอในทางคณิตศาสตร์<br />
+<br />
ว่า "eccentricity" เป็นตัวกําหนดชนิดของรูปร่างทีNเกิดขึ Wน ดังแสดงในภาพ (<strong>3.</strong>10)<br />
2<br />
1<br />
α<br />
r<br />
( θ<br />
)<br />
= 1 + ε cos θ<br />
ellipse<br />
circle<br />
− 3<br />
− 2<br />
− 1<br />
0 1<br />
− 1<br />
parabola<br />
hyperbola<br />
− 2<br />
ชนิดของ conic section<br />
ε<br />
= 0 circle<br />
0 < ε<br />
< 1 ellipse<br />
ε<br />
=<br />
1 parabola<br />
1 <<br />
ε<br />
hyperbola<br />
ภาพ (<strong>3.</strong>10) แสดงชนิดของ conic section โดยมีจุดกําเนิดเป็น จุดโฟกัส<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-35<br />
ตัวอย่างโจทย์<br />
r max<br />
r min<br />
จุดกําเนิด (Focus)<br />
b = semi-minor axis<br />
aε<br />
a = semi-major axis<br />
ภาพ (<strong>3.</strong>11) แสดงวงรี โดยมีจุดโฟกัสเป็นจุดกําเนิด<br />
วงรีประกอบด้วย 2 แกน คือ a) major axis หรือ แกนหลัก และ b) minor axis หรือ แกนรอง ใน<br />
การอธิบายถึงขนาดของมัน เรามักใช้ตัวแปร a และ b เรียกว่า semi-major axis และ semi-minor<br />
axis ซึ Nงหมายถึง ความยาวกึ Nงหนึ Nงของแกนหลัก และ กึ Nงหนึ Nงของแกนรอง ตามลําดับ ดังแสดงใน<br />
ภาพ จงพิสูจน์ว่า<br />
Ellipse semi-major axis a = ___________ สมการ (<strong>3.</strong>22)<br />
−<br />
2<br />
วิธีทํา จากสมการ (<strong>3.</strong>21) ในกรณีของวงรี 0 < ε < 1 นั Wน<br />
1<br />
α<br />
ε<br />
α<br />
r = rmin<br />
= ณ θ = 0<br />
1 + ε<br />
α<br />
r = rmax<br />
= ณ θ = π<br />
1 − ε<br />
และจากคํานิยามของ semi-major axis ในภาพข้างต้น ระยะ 2a = rmin + rmax<br />
ดังนั<br />
Wน<br />
หรือ<br />
α α ⎛ 1 1 ⎞ ⎛ 2 ⎞ 2<br />
2a = r min + r max = + = α ⎜ + ⎟ = α = α<br />
1+ ε 1− ε ⎝1+ ε 1− ε ⎠<br />
⎜ ( 1 ε )( 1 ε ) ⎟<br />
⎝ + − ⎠ 1−ε<br />
2<br />
a<br />
1<br />
α<br />
=<br />
−<br />
ตอบ<br />
ε<br />
2<br />
แบบฝึ กหัด <strong>3.</strong>7 ในกรณีของวงรี จะแสดงให้เห็นว่า<br />
Ellipse semi-minor axis b = αa<br />
___________ สมการ (<strong>3.</strong>23)<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-36<br />
แบบฝึ กหัด <strong>3.</strong>8 ในกรณีของวงรี จะแสดงให้เห็นว่า<br />
Ellipse Area A = π ab ___________ สมการ (<strong>3.</strong>24)<br />
บอกใบ้ ทําการ integrate ในพิกัด Cartesian ผนวกกับสูตร<br />
∫<br />
1 ⎛<br />
dx a − x = x a − x + a<br />
2 ⎜<br />
⎝<br />
2 2 2 2 2 −1<br />
sin<br />
x ⎞<br />
a ⎟<br />
⎠<br />
1st Law of Kepler<br />
Kepler ภายหลังจากการศึกษาข้อมูลการเคลืNอนทีNของดาว ซึ Nงรวบรวมไว้โดย Tycho Brahe ได้เสนอ<br />
กฎของการเคลืNอนทีNของดาวเคราะห์ไว้ทั Wงหมด 3 ข้อ โดย 2 ข้อแรกในปี ค.ศ. 1609 และ ข้อ<br />
สุดท้ายในปี ค.ศ. 1619 และมีใจความสําคัญก็คือ<br />
Kepler's Law<br />
I. Law of Orbits ดาวเคราะห์เคลืNอนทีNเป็นวงรี โดยมีดวงอาทิตย์เป็นจุดโฟกัส<br />
___________ สมการ (<strong>3.</strong>25)<br />
เพืNอแสดงให้เห็นว่า กฎข้อแรกของ Kepler นั Wน สอดคล้องกับสมการการเคลืNอนทีNของ central force<br />
motion ทีNผ่านมาใน Section <strong>3.</strong>2 เราพิจารณาสมการทีNแสดงความสัมพันธ์ระหว่าง เส้นทางการ<br />
เคลืNอนทีN r( θ ) และแรง F( r ) ดังแสดงในสมการ (<strong>3.</strong>20)<br />
2<br />
d ⎛ 1 ⎞ 1 µ k<br />
2 ⎜ ⎟ + =<br />
r r<br />
2<br />
dθ<br />
⎝ ⎠ l<br />
___________________ สมการ (<strong>3.</strong>26)<br />
k<br />
= − ซึ<br />
r<br />
ทั Wงนี WเมืNอแทน F( r)<br />
2<br />
Nงเป็นลักษณะของแรงโน้มถ่วง ( k = Gm1m<br />
2) จะได้ทางขวามือของ<br />
สมการข้างต้น สมการ (<strong>3.</strong>26) เป็นตัวกําหนดพฤติกรรมการเคลืNอนทีNของระบบ ภายใต้แรงโน้มถ่วง<br />
ซึ Nงมีผลเฉลยของสมการคือฟังชันก์ r( θ )<br />
ในลําดับต่อไปเราต้องการทดสอบว่า ถ้า r( θ ) อยู่ในรูปของวงรีดังสมการ (<strong>3.</strong>21) แล้วจะสามารถ<br />
ทําให้สมการ (<strong>3.</strong>26) เป็นจริงได้หรือไม่<br />
α<br />
1 ε cosθ<br />
เริNมด้วยการแทน r( θ ) = ในทางซ้ายมือของสมการ (<strong>3.</strong>26)<br />
+<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-37<br />
Left Hand Side: L.H.S. =<br />
2 2<br />
d ⎛ 1 ⎞ 1 d ⎛1+ ε cosθ ⎞ 1+<br />
ε cosθ<br />
2 ⎜ ⎟ + =<br />
r r<br />
2 ⎜ ⎟ +<br />
dθ<br />
⎝ ⎠ dθ<br />
⎝ α ⎠ α<br />
0 − ε cosθ 1+<br />
ε cosθ<br />
= +<br />
α α<br />
2<br />
d ⎛ 1 ⎞ 1 1<br />
2 ⎜ ⎟ + =<br />
dθ<br />
⎝ r ⎠ r α<br />
ซึ Nงเป็นค่าคงทีN ในขณะทีNทางขวามือของสมการ (<strong>3.</strong>26) อยู ่ในรูปของ<br />
µk<br />
Right Hand Side: R.H.S. =<br />
2<br />
l<br />
และก็เป็นค่าคงทีNอีกเช่นกัน จะเห็นว่าสมการ (<strong>3.</strong>26) มีโอกาสเป็นจริงได้ ด้วยเงืNอนไข<br />
1 µ k<br />
α = 2<br />
l<br />
หรือ<br />
2<br />
α µk<br />
= l ___________________ สมการ (<strong>3.</strong>27)<br />
ในเมืNอฟังชันก์ r( θ )<br />
= α<br />
ซึ<br />
1 + ε cosθ<br />
Nงเป็นสมการการเคลืNอนทีNในลักษณะของ conic section ทําให้<br />
สมการ (<strong>3.</strong>26) เป็นจริงได้ ย่อมแสดงว่ามันเป็น ผลเฉลยของสมการ และบ่งบอกถึงเส้นทางการ<br />
เคลืNอนทีNในกรณีของแรงโน้มถ่วง<br />
จากบทพิสูจน์ข้างต้น เส้นทางการโคจรของดาวเคราะห์ หรือ วัตถุในท้องฟ้ า จริงอยู ่อาจจะอยู ่ใน<br />
รูปของวงรี ดังทีNกฎข้อ 1 ของ Kepler กล่าวไว้ อย่างไรก็ตาม รูปร่างของวงโคจรทีNสามารถอธิบายได้<br />
ด้วยสมการ r( θ )<br />
= α<br />
นั<br />
1 + ε cosθ<br />
ขึ Wนอยู่กับเงืNอนไขของตัวแปร α และทีNสําคัญ ε<br />
Wน ยังสามารถเป็น circle, parabola, หรือ hyperbola ได้อีกด้วย<br />
จากสมการ (<strong>3.</strong>27) เราได้ทราบความสัมพันธ์ระหว่าง α กับ angular momentum ของระบบ และเรา<br />
สามารถหาความสัมพันธ์ระหว่าง eccentricity ε กับพลังงานของระบบได้ดังนี W<br />
Eccentricity<br />
2El<br />
ε = 1+<br />
µ k<br />
2<br />
2<br />
___________________ สมการ (<strong>3.</strong>28)<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-38<br />
สมการข้างต้นมีความสําคัญอย่างยิ Nงในการวิเคราะห์หารูปร่างของวงโคจร ว่าเกีNยวพันกับ angular<br />
momentum l และ พลังงานของระบบ E เช่นใด<br />
แบบฝึ กหัด <strong>3.</strong>9 พิสูจน์สมการ (<strong>3.</strong>28)<br />
บอกใบ้ หา E ของระบบ ณ ตําแหน่ง<br />
ดังนั Wนเราสรุปได้ว่า<br />
r = r ซึ<br />
min<br />
Nงเป็นจุดวกกลับพอดี ดังนั Wน r ɺ = 0 ณ จุด θ = 0<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> ภายใต้อิทธิพลของแรงโน้มถ่วง F( r)<br />
= −<br />
2<br />
α<br />
1 ε cosθ<br />
มีเส้นทางของวงโคจร r( θ ) = โดยทีN<br />
+<br />
2<br />
α µk<br />
r<br />
k<br />
= l และ<br />
2El<br />
ε = 1+<br />
µ k<br />
___________________ สมการ (<strong>3.</strong>29)<br />
แบบฝึ กหัด <strong>3.</strong>10 คํานวณพลังงาน E ของระบบ ในกรณีของวงโคจรรูปวงกลม<br />
เฉลย<br />
µ k<br />
E = −<br />
2 l<br />
2<br />
2<br />
ขณะดาวเคราะห์เคลือนที ภายในหนึงหน่วยเวลา dt<br />
มันกวาดได้พืนที<br />
dA<br />
(a)<br />
2<br />
2<br />
dA<br />
dt<br />
dA<br />
2 nd Law of Kepler: มีค่าคงทีเสมอ<br />
(จุดโฟกัส)<br />
dA<br />
(b)<br />
ภาพ (<strong>3.</strong>12) แสดงลักษณะของพื WนทีN dA ทีNเกิดขึ Wน ในขณะดาวเคราะห์โคจร<br />
2nd Law of Kepler<br />
กฎข้อ 2 ของ Kepler เกีNยวข้องกับอัตราเร็วของการเคลืNอนทีN ในขณะทีNดาวเคราะห์อยู ่ในวงโคจรทีNมี<br />
ลักษณะเป็นวงรี ยกตัวอย่างเช่น ในกรณีของโลกซึ Nงกําลังโคจรรอบดวงอาทิตย์ดังแสดงในภาพ (<strong>3.</strong>12)<br />
ในขณะทีNกําลังเคลืNอนทีNในระนาบ ณ ตําแหน่ง (a) วัตถุจะสามารถกวาดได้พื WนทีN dA จากการศึกษา<br />
Kepler พบว่า พื WนทีNซึ Nงดาวเคราะห์กวาดได้ ต่อหนึ Nงหน่วยเวลา มีค่าคงทีNเสมอ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-39<br />
Kepler's Law<br />
II. Law of Areal Velocity<br />
พื WนทีN ซึ Nงดาวเคราะห์กวาดได้ ต่อหนึ Nงหน่วยเวลา มีค่าคงทีNเสมอ<br />
___________________ สมการ (<strong>3.</strong>30)<br />
กฎข้อ 2 ของ Kepler ทําให้เราสามารถอธิบายได้ว่า เพราะเหตุใดเวลาทีNดาวหางโคจรเข้ามาใกล้ดวง<br />
อาทิตย์ มันจะมีอัตราเร็วสูงกว่าในขณะทีNมันอยู ่ไกลจากดวงอาทิตย์<br />
ดังแสดงในภาพ (<strong>3.</strong>12) จุด (a) ในขณะทีNอยู ่ไกลจากดวงอาทิตย์ รัศมีของการโคจรมีค่ามาก และมี<br />
พื WนทีN ทีNกวาดได้เท่ากับ dA<br />
เมืNอดาวหางเข้าใกล้ดวงอาทิตย์ ณ จุด (b) ดังแสดงในภาพ เนืNองจากรัศมีของการโคจรมีค่าน้อย<br />
พื WนทีN ทีNกวาดได้มีแนวโน้มจะน้อยลง เพืNอบังคับให้พื WนทีN dA มีค่าเท่าเดิม เป็นไปตามกฎข้อ 2 ของ<br />
Kepler ดาวหางจะต้องเคลืNอนทีNในแนวเส้นโค้ง ให้เป็นระยะทางไกลกว่าเดิม<br />
เมืNอดาวหาง ณ จุด (b) ต้องเดินทางเป็นระยะทางไกลกว่า เมืNอเปรียบเทียบกับจุด (a) ภายในระยะเวลา<br />
เท่าๆกัน เราบอกได้ว่า อัตราเร็วของดาวหางจะสูงขึ WนเมืNอเคลืNอนทีNเข้ามาใกล้ดวงอาทิตย์<br />
dθ<br />
r ( θ<br />
)<br />
rdθ<br />
โดยอาศัยกฎการอนุรักษ์ angular momentum เราสามารถพิสูจน์กฎข้อ 2 ของ Kepler ได้อย่างง่ายดาย<br />
พิจารณาการโคจรเป็นรูปวงรี ดังแสดงในภาพข้างต้น<br />
ภายในเวลา dt วัตถุเคลืNอนทีNเป็นระยะสั Wนๆ และมีมุมกวาด dθ ส่งผลให้เกิดเป็นพื WนทีNรูป<br />
สามเหลีNยม ซึ Nงมีขนาดเท่ากับ<br />
1<br />
2<br />
1<br />
2 r dθ<br />
2<br />
dA = x ฐาน x สูง =<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-40<br />
เมืNอนํา dt หารทั Wงสองข้างของสมการข้างต้น ทําให้<br />
dA<br />
dt<br />
1 dθ<br />
1<br />
2 dt 2<br />
2 2<br />
= r = r ɺ<br />
θ<br />
2<br />
นอกจากนี Wเราทราบว่า angular momentum = µ r ɺ 2<br />
l θ หรือ r ɺ θ เพราะฉะนั Wนแล้ว พื WนทีN<br />
ทีNกวาดได้ ต่อหนึ Nงหน่วยเวลา ก็คือ<br />
= l<br />
µ<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
dA l<br />
= = constant<br />
dt 2µ<br />
___________________ สมการ (<strong>3.</strong>31)<br />
3rd Law of Kepler<br />
โลกโคจรรอบดวงอาทิตย์ 1 รอบ ใช้เวลา 1 ปี ระยะเวลาดังกล่าวนี Wเอง คือคาบของการเคลืNอนทีNของ<br />
วัตถุครบ 1 รอบ แทนด้วยสัญลักษณ์ τ นักศึกษาคงจะพอเดาได้ว่า คาบของการเคลืNอนทีNนั Wน ควร<br />
จะสัมพันธ์อยู ่กับรัศมีของการโคจร กล่าวคือ ดาวเคราะห์ทีNโคจรอยู ่ใกล้ดวงอาทิตย์ อาทิ ดาวพุธ<br />
ดาวศุกร์ หรือ แม้กระทั Nงโลก ควรจะมีคาบ τ น้อยกว่าดาวทีNอยู ่ห่างออกไป อาทิเช่น ดาวยูเรนัส<br />
โคจรรอบดวงอาทิตย์ 1 รอบใช้เวลาถึง 84.07 ปี<br />
Kepler เป็นคนแรกทีNสามารถอธิบายสมการทางคณิตศาสตร์ ทีNโยงความสัมพันธ์ ระหว่าง period ของ<br />
การเคลืNอนทีN τ และ semi-major axis ของการโคจร a ได้สําเร็จ และเสนอเป็นกฎข้อ 3 ของ<br />
Kepler ในปี ค.ศ. 1619 หรือ 10 ปีให้หลังนับจากทีNเขาเสนอกฎ 2 ข้อแรก<br />
Kepler's Law<br />
2 3<br />
III. Law of Period คาบยกกําลังสอง แปรผันตรงกับ semi-mjor axis กําลังสาม หรือ τ ∼ a<br />
___________________ สมการ (<strong>3.</strong>32)<br />
แบบฝึ กหัด <strong>3.</strong>11 ในการโคจรเป็นวงกลมเนืNองจากแรงโน้มถ่วงรอบจุดโฟกัส ถ้าอยู่ห่างจากจุด<br />
โฟกัสออกไป 9 เท่า จะใช้เวลาโคจรครบ 1 รอบนานขึ Wนเท่าใด<br />
เฉลย ใช้เวลานานขึ Wน 27 เท่า<br />
ด้วยข้อจํากัดทางทฤษฏีในยุคของ Kepler ซึ Nงเป็นเวลาเกือบ 100 ปี ก่อนทีNจะมีกลศาสตร์ Newton<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-41<br />
หรือ calculus เป็นเรืNองน่าทึ NงทีN Kepler สามารถวิเคราะห์ข้อมูล จนสามารถมองเห็นความสัมพันธ์<br />
ดังในสมการ (<strong>3.</strong>32)<br />
โดยอาศัยการศึกษาเรืNอง central force motion เราผู้ได้มีโอกาสศึกษาเกีNยวกับกลศาสตร์ ตลอดจน<br />
calculus มาพอสมควร ย่อมถือว่าได้เปรียบ Kepler เมืNอกว่า 400 ปีก่อน มากมายนัก<br />
จากสมการ (<strong>3.</strong>31) เราทราบว่าพื WนทีN dA ทีNวัตถุกวาดไปได้ภายในเวลาสั Wนๆ อยู่ในรูปของ<br />
dA = l dt<br />
2µ<br />
ทั Wงนี WเมืNอทําการ integrate ทั Wงสองข้างของสมการ<br />
dA = l l<br />
dt = dt<br />
2µ 2µ<br />
∫ ∫ ∫<br />
จะเห็นว่า ∫ dA ก็คือพื WนทีNทั Wงหมดของวงรี ซึ Nงจากสมการ (<strong>3.</strong>24) ในแบบฝึกหัด A = π ab<br />
ในขณะทีN ∫ dt ก็คือเวลาทั Wงหมดในการโคจร ซึ Nงก็คือ คาบ τ นัNนเอง เพราะฉะนั Wนแล้ว<br />
π ab<br />
= l τ<br />
2µ<br />
เมืNอแทน b = αa<br />
ดังปรากฏในสมการ (<strong>3.</strong>23) และ<br />
2<br />
α µk<br />
= l ดังปรากฏในสมการ (<strong>3.</strong>29) จะได้<br />
ว่า<br />
π a<br />
2<br />
l l<br />
a = τ<br />
µ k 2µ<br />
ทําการยกกําลังสองทั Wงสองข้าง และจัดรูป จะนําไปสู ่สมการทีNอธิบายกฎข้อ 3 ของ Kepler กล่าวคือ<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
2<br />
2 4π µ 3<br />
τ = a ___________________ สมการ (<strong>3.</strong>33)<br />
k<br />
แบบฝึ กหัด <strong>3.</strong>12 ดาว 2 ดวงโคจรรอบกันและกันในลักษณะวงกลม โดยมีคาบเท่ากับ τ จงแสดง<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-42<br />
ให้เห็นว่า ระยะห่างระหว่างดาวทั Wงสองคือ<br />
m<br />
+ m<br />
3 2<br />
Binary Stars a = G<br />
1 2<br />
τ ___________________ สมการ (<strong>3.</strong>34)<br />
4π<br />
2<br />
ภาพ (<strong>3.</strong>13) แสดงข้อมูลของดาวเคราะห์ (คัดลอกมาจาก Marion และ Thornton, "Classical<br />
Dynamics of Particles and System")<br />
แบบฝึ กหัด <strong>3.</strong>13 จากข้อมูลทีNแสดงในภาพ (<strong>3.</strong>13) วาดกราฟแสดงความสัมพันธ์ ระหว่าง<br />
3<br />
a (ใน<br />
2<br />
แนวนอน) และ τ (ในแนวตั Wง) ซึ Nงจะได้กราฟเส้นตรง ทีNมีความชันโดยประมาณคือ<br />
2<br />
4π<br />
GM<br />
M ⊙ คือมวลของดวงอาทิตย์ อภิปรายว่าเหตุใด โดยประมาณแล้ว เราไม่จําเป็นต้องนํามวลของดาว<br />
เคราะห์มาวิเคราะห์ร่วมด้วย<br />
⊙<br />
เมืNอ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-43<br />
การเดินทางของยานอวกาศ STARDUST ในการเก็บตัวอย่างจากดาวหาง<br />
Collect Sample<br />
STARDUST<br />
Reentry<br />
Wild 2<br />
Earth<br />
Research<br />
Jupiter<br />
Credit: Jet Propulsion Laboratory<br />
ภาพ (<strong>3.</strong>14) แสดงวงโคจรในช่วงแรกของยานอวกาศ STARDUST เปรียบเทียบกับของดาวหาง<br />
Wild 2 เพืNอจะเคลืNอนทีNเข้าสู่วงโคจรของ Wild 2 ตัวยานอวกาศต้องมีการจุดเชื Wอเพลิง เพืNอเพิNม<br />
พลังงานของมัน ทุกอย่างจะต้องคํานวณไว้ล่วงหน้าอย่างแม่นยํา ก่อนเหตุการณ์จริง<br />
Section <strong>3.</strong>4 Orbit Dynamics<br />
การ "ขับ" กระสวยอวกาศเพืNอเดินทางระหว่างดาวเคราะห์ หรือ การพุ่งเฉียดดาวหางเพืNอเก็บตัวอย่าง<br />
ของแก็ส นั Wนลําบากกว่ากับขับรถยนต์หลายเท่าตัว ประการแรกเชื WอเพลิงทีNบรรจุอยู่มีจํากัด<br />
เพราะฉะนั Wนการเลี Wยว หรือ การเปลีNยนเส้นทางโคจรแต่ละครั Wง จําเป็นต้องมีการคํานวณอย่างละเอียด<br />
เพืNอให้ถึงทีNหมายโดยใช้พลังงานน้อยทีNสุด ประการทีNสอง การเคลืNอนทีNใช้เวลานาน และใช้เวลา<br />
ส่วนใหญ่ปล่อยให้กระสวยอวกาศเคลืNอนทีNตามกฎทางฟิสิกส์ ในขณะทีNการขับรถ เราจําเป็นต้อง<br />
เลี Wยวซ้ายหรือแซงขวาอยู ่บ่อยครั Wง<br />
orbit dynamics เป็นหัวข้อทีNเกีNยวข้องกับการควบคุม หรือ เปลีNยนแปลงวงโคจรของวัตถุในอวกาศ<br />
และมีศักยภาพในการนําไปประยุกต์ใช้ประโยชน์อย่างมหาศาล ทั WงทีNเกีNยวกับดาวเทียม การสํารวจ<br />
อวกาศ และ การบิน ยกตัวอย่างเช่น "project stardust"<br />
NASA ซึ Nงเป็นองค์กรการสํารวจอวกาศของประเทศสหรัฐ ได้ลงทุนกว่า 150$ ล้านเหรียญ ใน<br />
โครงการทีNจะส่งกระสวยอวกาศออกไปเก็บตัวอย่างของแก็สและฝุ ่นละอองทีNอยู ่โดยรอบดาวหาง<br />
และนํากลับมาศึกษาบนผิวโลก โดยให้ชืNอโครงการนี Wว่า project stardust<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-44<br />
ดังแสดงในภาพ (<strong>3.</strong>14) เป็นแผนเส้นทางการโคจรทีNเริ Nมวางไว้ในปี ค.ศ. 1992 โดยทีNยานอวกาศ<br />
ทะยานออกจากโลกเมืNอวันทีN 7 กุมภาพันธ์ 1999 เพืNอเก็บตัวอย่างสารประเภทคาร์บอนของดาวหาง<br />
Comet Wild 2 จากนั Wนวนรอบดวงอาทิตย์ 3 รอบ และเดินทางกลับมายังผิวโลกเมืNอ เดือน<br />
มกราคม ค.ศ. 2004 นับรวมเป็นเวลากว่า 5 ปีของการเดินทาง<br />
และเนื Wอหาใน Section <strong>3.</strong>4 Orbit Dynamics เราจะได้มีโอกาสศึกษาเทคนิคอย่างง่ายของการควบคุม<br />
เส้นทางการบินในอวกาศ<br />
เราสามารถเปลีNยนวงโคจร โดยอาศัยแรงขับจากการจุดระเบิดไอพ่น ทําให้ความเร็วของดาวเทียม<br />
สูงขึ Wน หรือ ตํ Nาลง ขึ Wนอยู่กับทิศทางของแรงขับ เมืNอความเร็วเปลีNยนแปลง ส่งผลให้พลังงานของ<br />
มันมีค่าแตกต่างจากเดิมตามไปด้วย ดังนั Wน ในขั Wนต้นนี W เราจะเริ Nมศึกษาความสัมพันธ์ระหว่าง<br />
พลังงาน E ของการเคลืNอนทีN และ รูปร่างของวงโคจรทีNจะเกิดขึ Wน<br />
พลังงาน และ วงโคจร<br />
พิจารณาสมการของพลังงาน E ในระบบ central force motion<br />
2<br />
2 l<br />
ɺ ( ) ___________________ สมการ (<strong>3.</strong>35)<br />
2<br />
1<br />
E = µ r + + U r<br />
2 2µ<br />
r<br />
ในเมืNอ E มีค่าคงทีN ดังนั Wนถ้าเราสามารถคํานวณพลังงานดังกล่าว ณ จุดใดจุดหนึ Nงของวงโคจร มันก็<br />
ย่อมมีค่าเท่าเดิมในทุกๆตําแหน่งเช่นเดียวกัน ดังนั Wน พิจารณาในขณะทีNวัตถุเคลืNอนทีNเข้ามาใกล้จุด<br />
โฟกัสมากทีNสุด หรือ r = rmin<br />
ดังแสดงในภาพ (<strong>3.</strong>10) 1) สมมุติว่าวัตถุเริ NมเคลืNอนทีNเข้ามาใกล้ ในช่วงนี W รัศมี r จะมีค่าลดลง หรือ<br />
dr<br />
อีกนัยหนึ Nง 0<br />
dt < 2) เมืNอมาถึงยังตําแหน่ง r = rmin<br />
= วัตถุจะอยู ่ใกล้จุดโฟกัสทีNสุด 3)<br />
1 + ε<br />
dr<br />
จากนั Wนจะเริ NมเคลืNอนทีNออกห่าง ทําให้รัศมีเพิ Nมขึ WนเมืNอเวลาผ่านไป หรืออีกนัยหนึ Nง 0<br />
dt > โดยทีN<br />
ทั Wง 3 ขั Wนตอนสรุปโดยสังเขปได้ว่า<br />
α<br />
1) เคลืNอนเข้าใกล้<br />
dr<br />
0<br />
dt <<br />
2) ใกล้ทีNสุด ณ r<br />
α<br />
rmin<br />
= =<br />
1 + ε<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-45<br />
dr<br />
3) เริNมออกห่าง 0<br />
dt ><br />
จากกระบวนการข้างต้น จะพบว่า dr มีการเปลีNยนเครืNองหมาย จากน้อยกว่าศูนย์ มาเป็น มากกว่า<br />
dt<br />
dr<br />
ศูนย์ ดังนั Wน ณ ตําแหน่ง r = r จะได้ว่า อัตราเร็วในแนวรัศมี r ɺ 0<br />
min<br />
dt = =<br />
แบบฝึ กหัด <strong>3.</strong>14 จงพิสูจน์ว่า ณ ตําแหน่ง<br />
เท่านั Wน กล่าวคือ v = rθɺ<br />
r = r อัตราเร็วของวัตถุมีเฉพาะส่วนของการหมุน<br />
min<br />
ดังนั Wน เมืNอแทน r ɺ = 0 ณ ตําแหน่ง r rmin<br />
ถ่วง ในสมการ (<strong>3.</strong>35) จะทําให้<br />
α<br />
= = แทน U ( r)<br />
1 + ε<br />
k<br />
r<br />
= − ในกรณีของแรงโน้ม<br />
min<br />
l k<br />
E = 0 + −<br />
2 µr r<br />
2<br />
2<br />
min<br />
min<br />
2<br />
แต่จากสมการ (<strong>3.</strong>27) l = αµk ดังนั Wนพลังงาน E<br />
α<br />
1 ε<br />
จากนั Wนแทน rmin<br />
= จะได้ว่า +<br />
α µ k<br />
=<br />
2 r<br />
1+ ε ⎛1+<br />
ε ⎞ k<br />
E = k ⎜ − 1⎟<br />
= −<br />
α ⎝ 2 ⎠ 2<br />
k k ⎛ α ⎞<br />
− = ⎜ −1⎟<br />
r r 2r<br />
⎠<br />
µ min<br />
2 min min ⎝ min<br />
2<br />
( 1−<br />
ε )<br />
เนืNองจาก semi-major axis a สัมพันธ์อยู ่กับ eccentricity ε ดังในสมการ (<strong>3.</strong>22) เพราะฉะนั Wน<br />
พลังงาน E ลดรูปเหลือเพียง<br />
α<br />
E<br />
k<br />
2a<br />
= − ___________________ สมการ (<strong>3.</strong>36)<br />
ผลลัพธ์ข้างต้น มีความสําคัญอย่างยิ Nง ในการควบคุมกระสวยอวกาศ เพราะแสดงความสัมพันธ์<br />
ระหว่างพลังงานของมัน และ semi-major axis a ซึ NงเกีNยวข้องโดยตรงกันรูปร่างของวงโคจร ดังทีN<br />
ได้กล่าวไปแล้วในตอนต้นว่า เราสามารถควบคุมพลังงานโดยการจุดระเบิดเครืNองยนต์จรวด และ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-46<br />
อาศัยสมการ (<strong>3.</strong>36) เป็นการควบคุมเส้นทาง และ รูปร่างของการโคจรโดยปริยาย<br />
ตัวอย่างโจทย์<br />
บั Wงไฟมวล m อยู่ในวงโคจร ภายใต้สนามโน้มถ่วงทีNมีค่าคงทีN k โดยทีNวงโคจรเป็นวงกลมซึ Nงมีรัศมี<br />
r จากนั WนมีการจุดระเบิดเพืNอเร่งให้อัตราเร็วขึ Wนมากกว่าเดิม 2 เท่า จงหาลักษณะของวงโคจรใหม่<br />
1<br />
วิธีทํา จากโจทย์แสดงว่า พลังงานศักย์อยู ่ในรูปของ U ( r)<br />
= − และเมืNอวงโคจรเป็นวงกลม<br />
แสดงว่ารัศมี r มีค่าคงทีN หรือ rmin rmax r1<br />
k<br />
r<br />
= = ในการนําสมการ (<strong>3.</strong>36) มาใช้งาน เราต้องทราบ<br />
r + r 2r<br />
2 2<br />
min max<br />
semi-major axis a ของการเคลืNอนทีN และจากภาพ (<strong>3.</strong>11) a = =<br />
1<br />
ทําให้บั Wงไฟมี<br />
พลังงานก่อนการจุดระเบิดเท่ากับ<br />
E<br />
1<br />
= −<br />
k<br />
2r<br />
1<br />
และเราสามารถคํานวณหาอัตราเร็วในขณะนี Wได้ โดยพิจารณา E 1 ออกเป็นส่วนของพลังงานจลน์<br />
และพลังงานศักย์<br />
1 2 1 2 k<br />
E1 = mv 1 + U ( r) = mv1<br />
−<br />
2 2 r<br />
1<br />
กําหนดให้ E 1 ทั Wงสองสมการเท่ากัน และแก้หา v 1 จะได้ว่า<br />
k<br />
mr<br />
Circular Orbit v1<br />
= ________________ สมการ (<strong>3.</strong>37)<br />
จากนั Wนโจทย์กําหนดให้ มีการจุดระเบิด ทําให้อัตราเร็วเพิ Nมขึ Wนเป็น 2 เท่า เพราะฉะนั Wนแล้ว<br />
1<br />
v = 2v = 2<br />
2 1<br />
k<br />
mr<br />
1<br />
เมืNออัตราเร็วเปลีNยน พลังงานงานก็ย่อมเปลีNยนแปลง และจากสมการ (<strong>3.</strong>36) ทําให้ semi-major axis<br />
a ของวงโคจรแตกต่างออกไปจากเดิม พลังงานภายหลังการจุดระเบิดคือ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-47<br />
1 2 1<br />
2 v k ⎛<br />
2 4<br />
k ⎞<br />
E = m − = m⎜<br />
⎟ − k =<br />
k<br />
2 r1 2 ⎝ mr1 ⎠ r1 r1<br />
อาศัยสมการ (<strong>3.</strong>36) เราคํานวณ semi-major axis a 2 ได้ว่า<br />
a<br />
2<br />
k r<br />
= − = −<br />
1<br />
2E<br />
2<br />
2<br />
เมืNอ a 2 ทีNคํานวณได้ มีค่าติดลบ เราสามารถวิเคราะห์ลักษณะของวงโคจรได้โดยพิจารณา<br />
ความสัมพันธ์ระหว่าง semi-major axis a และ eccentricity ε ดังสมการ (<strong>3.</strong>22)<br />
α<br />
a =<br />
2<br />
1 −ε<br />
2<br />
การทีN a จะติดลบได้ ก็ต่อเมืNอ ε > 1 หรือ อีกนัยหนึ Nง ε > 1 ซึ Nงจากสมการ (<strong>3.</strong>21)<br />
ε > 1 เป็นวงโคจรแบบ hyperbola ภายหลังการจุดระเบิด ตอบ<br />
(b) วงโคจร hyperbola<br />
(a) วงกลม<br />
r 1<br />
ซึ Nงเราสรุปเป็น 3 ขั Wนตอนดังแสดงในภาพ<br />
1) บั Wงไฟโคจร ภายในวงโคจร (a)<br />
2) มีการจุดระเบิด ทําให้ค่า eccentricity ε > 1 และเปลีNยนรูปร่างของวงโคจร เป็น hyperbola<br />
3) โคจรตามแนวเส้น วงโคจร (b)<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-48<br />
Hohman Transfer - การเปลียนวงโคจร<br />
เชื Wอเพลิงเป็นข้อจํากัดอย่างยิ Nงในการเดินทางระหว่างเคราะห์ เพราะฉะนั WนการจุดระเบิดเครืNองยนต์<br />
ไอพ่นในแต่ละครั WงเพืNอเร่งให้ยานอวกาศมีความเร็วในทิศทางและขนาดทีNต้องการ จึงต้องทําด้วย<br />
ความระมัดระวังและแม่นยําทีNสุด ในปี 1925 Walter Hohmann นักวิจัยในสาขาการเดินทางอวกาศ<br />
ได้คิดค้นวิธีการเดินทางระหว่างดาวเคราะห์ ทีNใช้พลังงานน้อยทีNสุด ด้วยการจุดระเบิดเพียง 2 ครั Wง<br />
ซึ Nงกระบวนการดังกล่าวเรียกโดยทั Nวไปว่า "Hohman Transfer" (Marion and Thornton, "Classical<br />
Dynamics of Particles and Systems")<br />
2<br />
กระบวนการ Hohman Transfer<br />
v 2<br />
r 1<br />
r 1<br />
2<br />
โลก<br />
r<br />
v 1<br />
ดาวอังคาร<br />
r<br />
v HT<br />
ภาพ (<strong>3.</strong>15) แสดงกระบวนการ 3 ขั Wนตอนของ Hohman Transfer<br />
พิจารณาดาวเคราะห์ 2 ดวงทีNโคจรเป็นวงกลม ในระนาบเดียวกัน อาทิเช่น โลกและดาวอังคาร ดัง<br />
แสดงในภาพ (<strong>3.</strong>15) โดยทีNโลกและดาวอังคารมีรัศมี r 1 และ r 2 ตามลําดับ<br />
ก่อนทีNจะวิเคราะห์กระบวนการเดินทางระหว่างโลกและดาวอังคาร เราพิจารณาสมบัติของแต่ละวง<br />
โคจรเสียก่อน<br />
เพืNอทีNจะอยู่ในวงโคจรของโลก เราสามารถคํานวณพลังงานของยานอวกาศจากสมการ (<strong>3.</strong>36)<br />
E<br />
1<br />
= −<br />
k<br />
2r<br />
1<br />
ในสมการข้างต้น เนืNองจากเป็นวงกลม semi-major axis a1 = r1<br />
นัNนเอง และในทํานองเดียวกัน<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-49<br />
กับบั Wงไฟในตัวอย่างโจทย์ทีNผ่านมา เราสามารถคํานวณอัตราเร็วของยานอวกาศ ทีNต้องการอยู่ในวง<br />
โคจรของโลกได้ว่า<br />
วงโคจรของโลก v1<br />
=<br />
k<br />
mr<br />
1<br />
เมืNอ m คือมวลของยานอวกาศ และ ในทํานองเดียวกัน<br />
วงโคจรของดาวอังคาร v2<br />
=<br />
k<br />
mr<br />
2<br />
เมืNอทราบอัตราเร็วทีNยานอวกาศจะต้องมี ในการเคลืNอนทีNอยู ่ในวงโคจรเดียวกันกับโลก และ กับดาว<br />
อังคารแล้ว ในคราวนี Wเราเริ Nมพิจารณากระบวนการ Hohmann transfer ซึ Nงประกอบด้วย 3 ข้อดัง<br />
แสดงในภาพ (<strong>3.</strong>15)<br />
1) ยิงยานอวกาศเข้าสู ่วงโคจรของโลก ดังแสดงเป็นเส้นโค้งสีเขียว ในขั Wนแรกนี W ยานอวกาศ<br />
จะต้องมีอัตราเร็วเท่ากับ v 1<br />
2) ปรับเข้าสู ่วงโคจรรูปวงรี ซึ Nงมีทิศทางของแกนหลัก (major axis) หันออกด้านนอก ทําให้<br />
สามารถเคลืNอนออกห่างจากดวงอาทิตย์ได้ เรียกวงโคจรในลักษณะวงรีนี Wว่า Hohmann transfer orbit<br />
ซึ NงในทีNนี Wจะแทนด้วย subscript HT เราสามารถคํานวณอัตราเร็ว v HT ทีNยานอวกาศจะต้องมี ในการ<br />
เคลืNอนทีNในวงรีดังกล่าว โดยอาศัยสมการ (<strong>3.</strong>36) อีกเช่นกัน<br />
E<br />
HT<br />
k<br />
= −<br />
2a<br />
HT<br />
จากการวิเคราะห์เชิงเรขาคณิตจะพบว่า semi-major axis ของ วงรีดังกล่าวมีค่าเท่ากับ a =<br />
1 2<br />
เพราะฉะนั Wน พลังงานคือ<br />
HT<br />
r + r<br />
2<br />
E<br />
HT<br />
= − k<br />
r + r<br />
1 2<br />
ซึ NงเมืNอกระจายพลังงานรวมดังกล่าว ออกเป็นส่วนของพลังงานศักย์ และ พลังงานศักย์ จะได้ว่า<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
W<br />
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-50<br />
k 1 1<br />
E m U r m<br />
2 2<br />
HT = − = v HT + ( 1) = vHT<br />
−<br />
r1 + r2 2 2 r1<br />
k<br />
ในสมการข้างต้นจะเห็นว่า เป็นพลังงานศักย์ ณ รัศมี r 1 ก็เพราะในขณะทีNมีการจุดระเบิดเพืNอเปลีNยน<br />
เข้าสู ่วงรีนั Wน เรายังห่างจากดวงอาทิตย์เป็นระยะ r 1 อยู่นั Nนเอง<br />
ทั Wงนี W เมืNอแก้สมการหา v HT จะได้ว่า<br />
=<br />
k ⎛<br />
−<br />
⎝<br />
vHT<br />
2⎜1 mr1 1 + r2 r1<br />
1<br />
⎞<br />
⎟<br />
⎠<br />
________________ สมการ (<strong>3.</strong>38)<br />
สมการ (<strong>3.</strong>38) เป็นอัตราเร็วทีNยานอวกาศจะต้องมี เพืNอเข้าสู ่วงรี หรือ Hohman transfer orbit<br />
3) เมืNอเดินทางออกห่างจากดวงอาทิตย์ มาถึงระยะ r = r2<br />
ทําการยิงไอพ่นอีกครั Wงหนึ NงเพืNอปรับ<br />
อัตราเร็ว ให้มีขนาดเท่ากับ v 2 ก็จะเข้าสู ่วงโคจรของดาวอังคารดังต้องการ<br />
11<br />
ยกตัวอย่างเช่น เมืNอแทนรัศมี r 1 = 1.495× 10 เมตร และ r2 r 1 = 1.5237 จากข้อมูลทีNปรากฏ<br />
ในภาพ (<strong>3.</strong>13) นอกจากนี W<br />
k GmM ⊙<br />
= = GM<br />
m m<br />
อัตราเร็วในแต่ละขั Wนตอนของ Hohman transfer ดังต่อไปนี<br />
1) เข้าสู ่วงโคจรของโลก v1<br />
2) ขับเคลืNอนทีNเข้าสู ่วงรี<br />
3) ขับเคลืNอนเข้าสู ่วงโคจรดาวอังคาร v2<br />
⊙ เมืNอ M ⊙ คือมวลของดวงอาทิตย์ จะได้<br />
≅ 29.8km s<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012<br />
vHT<br />
≅ 32.7 km s<br />
≅ 24.1km s<br />
อย่างไรก็ตาม Hohman transfer ดังแสดงในภาพ (<strong>3.</strong>15) จะต้องมีการกําหนดช่วงเวลาทีNเหมาะสมใน<br />
การเข้าสู ่วงรี เพราะเมืNอยานอวกาศมาถึงยังวงโคจรของดาวอังคาร ยกตัวอย่างเช่นในขั WนตอนทีN 3<br />
ดาวอังคารจะต้องอยู ่ ณ ตําแหน่งดังกล่าวพอดี<br />
ตัวอย่างโจทย์<br />
จงคํานวณเวลาทีNยานอวกาศ เดินทางจากวงโคจรของโลก ไปยังดาวอังคาร โดยอาศัย Hohmann<br />
transfer orbit
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-51<br />
วิธีทํา จากฎข้อ 3 ของ Kepler เราสามารถคํานวณคาบทีNใช้ในการโคจรของวงรี ดังกล่าวได้ว่า<br />
2<br />
2 4π µ 3<br />
HT aHT<br />
τ =<br />
k<br />
ซึ Nงจากภาพ (<strong>3.</strong>15) a =<br />
1 2<br />
กําหนดให้ m คือมวลของยานอวกาศ และ M ⊙ คือมวลของ<br />
ดวงอาทิตย์ ดังนั Wน<br />
HT<br />
r + r<br />
2<br />
2 2<br />
4 4π<br />
mM⊙<br />
π µ =<br />
k<br />
( m + M⊙ ) G mM⊙ ( + ⊙ )<br />
มวลมากกว่ายานอวกาศ เราประมาณได้ว่า ( m + M ) ≅ M<br />
กฎข้อ 3 ของ Kepler ทีNว่า<br />
=<br />
⊙<br />
2<br />
4π<br />
m M G<br />
และเนืNองจาก ดวงอาทิตย์มี<br />
⊙ ทําให้ได้ความสัมพันธ์ในรูปของ<br />
τ<br />
2<br />
2 4π<br />
⎛ r1 + r2<br />
HT<br />
M⊙G<br />
⎝ 2<br />
⎞<br />
= ⎜ ⎟<br />
⎠<br />
3<br />
หรือ<br />
τ<br />
HT<br />
2π<br />
⎛ r1 + r2<br />
⎞<br />
= ⎜ ⎟<br />
M G ⎝ 2 ⎠<br />
⊙<br />
3 2<br />
เมืNอแทน<br />
G = 6.673×<br />
10<br />
−11<br />
m<br />
3<br />
kg ⋅s<br />
11<br />
( )<br />
r = × × จะได้ว่า<br />
2 1.5237 1.495 10 m<br />
2<br />
30<br />
11<br />
, M ⊙ = 1.989×<br />
10 kg ,<br />
r = × , แล<br />
1 1.495 10 m<br />
τ<br />
HT<br />
3 2<br />
2π<br />
⎛ r1 + r2<br />
⎞<br />
7<br />
= ⎜ ⎟ = 4.469×<br />
10 s<br />
M G ⎝ 2 ⎠<br />
⊙<br />
หรือ ประมาณ 517 วัน<br />
อย่างไรก็ตาม นี Wเป็นเวลาในการโคจรครบ 1 รอบ แต่ในกรณีของ Hohmann transfer orbit เรา<br />
เดินทางเฉพาะขาไป ดังนั Wน เวลาทีNใช้ในการเดินทางคือ ครึ Nงหนึ Nงของคาบพอดี เพราะฉะนั Wน<br />
เวลาทีNใช้เดินทาง เท่ากับ 259 วัน โดยประมาณ ตอบ<br />
Section <strong>3.</strong>5 บทสรุป<br />
ในการศึกษาการเคลืNอนทีNของระบบ 2 อนุภาค ซึ NงมีแรงทีNกระทําต่อกัน อยู่ในแนวเส้นตรงระหว่าง<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
W<br />
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-52<br />
อนุภาคทั Wงสอง หรือทีNเรียกว่า central force motion เริNมด้วยการพิจารณา center of mass หรือ จุด<br />
ศูนย์กลางมวลของระบบ<br />
<br />
Center of Mass<br />
1 1 2 2 3 3<br />
r =<br />
cm<br />
<br />
m r + m r + m r + ⋯<br />
M<br />
เมืNอ M = m1 + m2 + m3<br />
+⋯<br />
ซึ Nงจุดศูนย์กลางมวลดังกล่าว มีประโยชน์อย่างยิ Nงในการวิเคราะห์ระบบของวัตถุทีNมีรูปทรง และจาก<br />
กฎข้อ 2 ของ Newton จุดศูนย์กลางมวลของวัตถุทั Wงก้อนจะมีความเร่งก็ต่อเมืNอ มีแรงภายนอก มา<br />
กระทําเท่านั Wน หรืออีกนัยหนึ Nง<br />
<br />
a<br />
cm<br />
2<br />
d<br />
=<br />
2 cm = F<br />
<br />
<br />
r<br />
dt M<br />
(ext)<br />
net<br />
และเราได้นําหลักการดังกล่าว มาเป็นเครืNองมือในการศึกษาตัวอย่างโจทย์ในหลายกรณี อาทิเช่น Jack<br />
เดินบนท้องเรือ หรือกล่องไถลบนฐานสามเหลีNยมเป็นต้น<br />
ในแง่ของ central force motion เราได้ใช้ประโยชน์จาก center of mass โดยการกําหนดให้จุด<br />
ดังกล่าวเป็นจุดกําเนิดในการวิเคราะห์ระบบ 2 อนุภาค ทําให้รูปแบบทางคณิตศาสตร์ ดูเสมือนว่า<br />
เป็นระบบ 1 อนุภาคซึ Nงมีมวล µ เรียกโดยทั Nวไปว่า reduced mass ซึ Nงอาจจะเขียนโดยใช้ภาษาของ<br />
Lagrange mechanics ได้ว่า<br />
1<br />
= −U ( r)<br />
2<br />
≡ x + y + z r ≡ r − r<br />
<br />
2<br />
System of Two Particles L µ r ɺ<br />
2 2 2 2<br />
เมืNอ r ɺ ɺ ɺ ɺ โดยทีN 1 2<br />
m m<br />
m + m<br />
และ µ ≡<br />
1 2<br />
1 2<br />
ซึ NงมีชืNอว่า Reduced Mass<br />
จะสังเกตเห็นว่า ตัวแปร r ทีNกําลังกล่าวถึงในระบบเสมือนทีNดูคล้ายจะประกอบด้วย 1 อนุภาคนี<br />
มีความหมายเป็นระยะห่างระหว่างอนุภาค m 1 และ m 2 นัNนเอง<br />
อาศัยกฎเกณฑ์ของ Lagrange mechanics เราสามารถสรุปว่า reduced mass µ ดังกล่าวเคลืNอนทีNแต่<br />
เฉพาะในระนาบเดียวเท่านั Wน จึงเหมาะสมทีNเราจะใช้เพียง 2 ตัวแปร ( r,<br />
θ ) ในพิกัด polar ในการ<br />
อธิบายตําแหน่งของมวลดังกล่าว ซึ NงเมืNอพยายามสร้าง Lagrange equation of motion ทําให้เราได้<br />
ข้อสรุปหลายอย่างเกีNยวกับ central force motion กล่าวคือ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-53<br />
และ<br />
2<br />
Angular Momentum l = µ r ɺ θ = ค่าคงทีNเสมอ<br />
Total Energy<br />
1 2 l<br />
E = µ rɺ<br />
+ + U ( r)<br />
2<br />
2<br />
2µ<br />
r<br />
2<br />
ทั Wงนี W เราได้ยกตัวอย่างการนําสมการของพลังงาน E มาประยุกต์ใช้ในการวิเคราะห์หาเงืNอนไขของ<br />
stable circular orbit โดยนิยามให้<br />
ภายใต้เงืNอนไข<br />
Effective Potential Energy<br />
l<br />
Ueff ( r) ≡ + U( r)<br />
2<br />
2µr<br />
2<br />
d U<br />
dr =<br />
เงืNอนไข Equilibrium eff ( r ) = 0<br />
Stable Circular Orbit<br />
Unstable Circular Orbit<br />
2<br />
r R<br />
d<br />
2 U eff ( r ) > 0<br />
dr<br />
2<br />
r=<br />
R<br />
d<br />
2 U eff ( r ) < 0<br />
dr<br />
นอกจาก angular momentum l และพลังงาน E แล้ว ในกระบวนการของการสร้าง Lagrange<br />
equation of motion เรายังค้นพบสมการทีNโยงความสัมพันธ์ระหว่างแรง F( r ) ทีNอนุภาคทั Wงสอง<br />
กระทําต่อกัน และลักษณะวงโคจร r( θ ) ทีNเกิดขึ Wน<br />
r=<br />
R<br />
2 2<br />
d ⎛ 1 ⎞ 1 µ r<br />
2 ⎜ ⎟ + = −<br />
r r<br />
2<br />
dθ<br />
⎝ ⎠ l<br />
F( r)<br />
และอาศัยเซตของสมการดังกล่าวมาข้างต้น ทําให้เราสามารถทํานายการเคลืNอนทีNของ reduced mass<br />
µ ว่ามีรัศมี r = r( t)<br />
และ มุม θ = θ ( t)<br />
เปลีNยนแปลงกับเวลาอย่างไรได้สําเร็จ แม้ว่าสมการ<br />
ข้างต้นจะประยุกต์ใช้ได้กับแรง F( r ) ได้หลากหลาย แต่เราได้ทําการตีกรอบการพิจารณาเฉพาะ<br />
k<br />
แรงโน้มถ่วง F( r)<br />
= − และหันมาศึกษาในเรืNองกฎของ Kepler ซึ NงเกีNยวข้องกับการเคลืNอนทีNของ<br />
2<br />
ดาวเคราะห์ทั Wง 3 ข้อ<br />
r<br />
และในขั Wนนี Wเอง ทีNเราได้ทบทวนคณิตศาสตร์ทีNเกีNยวข้องกับ conic section หรือ ภาคตัดกรวย ซึ Nงก็คือ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-54<br />
เซตของรูปร่าง วงกลม วงรี parabola และ hyperbola ว่าสามารถเขียนเป็นสมการในพิกัด polar ได้ว่า<br />
สมการของ Conic Section<br />
⎧ε<br />
= 0 circle<br />
α ⎪0 < ε < 1 ellipse<br />
r( θ ) = ⎨<br />
1 + ε cosθ<br />
⎪ε<br />
= 1 parabola<br />
⎪<br />
⎩1 < ε hyperbola<br />
เมืNอ ε มีชืNอว่า eccentricity ทีNเป็นตัวกําหนดรูปร่างของ conic section และอาศัยสมการของการ<br />
เคลืNอนทีN ดังทีNกล่าวไว้ในตอนต้น เราได้ทําการวิเคราะห์ กฎข้อ 1 ของ Kepler ทีNมีใจความว่า<br />
Kepler's Law<br />
I. Law of Orbits ดาวเคราะห์เคลืNอนทีNเป็นวงรี โดยมีดวงอาทิตย์เป็นจุดโฟกัส<br />
ซึ NงเมืNอเราทําการพิสูจน์ โดยอาศัยกลไกของ Lagrange mechanics ทําให้ได้ข้อสรุปทีNคล้ายคลึง (แต่กิน<br />
ใจความกว้างขวางกว่า) กฎข้างต้น กล่าวคือ<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> ภายใต้อิทธิพลของแรงโน้มถ่วง F( r)<br />
= −<br />
2<br />
α<br />
1 ε cosθ<br />
มีเส้นทางของวงโคจร r( θ ) = โดยทีN<br />
+<br />
และเมืNอหันมาพิจารณา กฎข้อ 2 ของ Kepler ทีNว่า<br />
2<br />
α µk<br />
r<br />
k<br />
= l และ<br />
2El<br />
ε = 1+<br />
µ k<br />
Kepler's Law<br />
II. Law of Areal Velocity พื WนทีN ซึ Nงดาวเคราะห์กวาดได้ ต่อหนึ Nงหน่วยเวลา มีค่าคงทีNเสมอ<br />
ทําให้เราได้ข้อสรุป ในทํานองเดียวกัน<br />
2<br />
2<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
dA l<br />
= = constant<br />
dt 2µ<br />
ในท้ายทีNสุด กฎข้อ 3 ของ Kepler ทีNโยงความสัมพันธ์ระหว่างคาบของการโคจร และ ขนาดของวง<br />
โคจร ซึ Nงมีใจความสําคัญคือ<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-55<br />
Kepler's Law<br />
III. Law of Period<br />
คาบยกกําลังสอง แปรผันตรงกับ semi-mjor axis กําลังสาม หรือ<br />
2 3<br />
τ ∼ a<br />
และอีกเช่นเคย อาศัยสมการของ central force motion เราได้บทสรุปทีNมีความสมบูรณ์ของสมการ<br />
มากกว่า กล่าวคือ<br />
<strong>Central</strong> <strong>Force</strong> <strong>Motion</strong><br />
2<br />
2 4π µ 3<br />
τ =<br />
k<br />
a<br />
อย่างไรก็ตาม การนําสมการของ central force motion มาประยุกต์ใช้ให้เห็นจริง มิได้จํากัดอยู ่แต่เพียง<br />
การพิสูจน์กฎทั Wง 3 ข้อของ Kepler ดังทีNผ่านมาเท่านั Wน เรายังได้นํามาประยุกต์ในการศึกษาเรืNอง orbit<br />
dynamics ซึ NงเกีNยวข้องกับการควบคุม หรือ เปลีNยนแปลงวงโคจรของยานอวกาศ<br />
ในการขับเคลืNอนยานอวกาศ ทําได้โดยการยิงไอพ่นเพืNอปรับอัตราเร็ว และทําให้พลังงานของมัน<br />
เปลีNยนแปลง ส่งผลให้รูปร่างของวงโคจรแตกต่างไปจากเดิม โดยทีNความสัมพันธ์ระหว่าง<br />
พลังงานและวงโคจรก็คือ<br />
E = −<br />
เมืNอ a คือ semi-major axis ของวงโคจร และสมการเดียวนี Wเอง เป็นเครืNองมือให้เราสามารถ<br />
วิเคราะห์วงโคจรของบั Wงไฟในตัวอย่างโจทย์ ตลอดจนศึกษาการส่งยานอวกาศระหว่างวงโคจรของ<br />
โลกและดาวอังคารโดยใช้พลังงานน้อยทีNสุด หรือทีNเรียกว่า Hohmann transfer นั Nนเอง<br />
k<br />
2a<br />
Section <strong>3.</strong>6 ปัญหาท้ายบท<br />
แบบฝึ กหัด <strong>3.</strong>15<br />
ในอวกาศสมมุติให้มีเพียงดาวเคราะห์ 2 ดวงมีมวลเป็น m 1 และ m 2 เริNมจากจุดหยุดนิ Nง เป็น<br />
ระยะห่าง r 0 ด้วยแรงโน้มถ่วง ทั Wงคู่ดึงดูดกันและชนกันในทีNสุด ตําแหน่งของการชน อยู ่ห่างจาก<br />
ดาวเคราะห์ m 1 เท่าใด<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-56<br />
แบบฝึ กหัด <strong>3.</strong>16 คนด้านซ้ายมวล m 1 และด้านขวามวล m 2 ยืนหยุดนิ Nงห่างกันเป็นระยะ d บน<br />
พื WนทีNปราศจากแรงเสียดทาน จากนั Wนทั Wงสองเริ Nมดึงเชือก จุดทีNเคลืNอนทีNเข้ามาพบกัน อยู่ห่างจากจุดทีN<br />
คนทางซ้ายยืนอยู ่เดิมเท่าใด<br />
แบบฝึ กหัด <strong>3.</strong>17 จงแสดงให้เห็นว่า ในกรณีของวงรี จุดโฟกัส จะอยู ่ห่างจากจุดศูนย์กลางของวงรี<br />
เป็นระยะทาง aε ดังแสดงในภาพ (<strong>3.</strong>11)<br />
แบบฝึ กหัด <strong>3.</strong>18 ดาวมวล m 1 และ m 2 เริNมจากจุดหยุดนิ NงทีNระยะ r 0 ด้วยแรงโน้มถ่วง จึงพุ่งเข้า<br />
มาหากัน ในขณะทีNอยู ่ห่างกันเป็นระยะ r < r0<br />
มวลทั Wงสองมีความเร็วเท่าใด<br />
เฉลย v1 2<br />
2G<br />
⎛ 1 1 ⎞<br />
= m ⎜ − ⎟ M ⎝ r r 0 ⎠<br />
และ v2 1<br />
2G<br />
⎛ 1 1 ⎞<br />
= m ⎜ − ⎟ M ⎝ r r 0 ⎠<br />
เมืNอ M = m1 + m2<br />
แบบฝึ กหัด <strong>3.</strong>19 จากการวิเคราะห์ระบบของดาว 2 ดวง เมืNอลดรูปเหลือมวลลดทอน (reduced mass)<br />
ก้อนเดียว จะได้ว่า เส้นทางโคจรเป็นแบบก้นหอย ดังสมการ r = kθ จงหาแรงทีNอนุภาคทั Wงสอง<br />
กระทําต่อกัน และ พลังงานของระบบ<br />
เฉลย<br />
2 2<br />
l ⎛ 2k<br />
1 ⎞<br />
F( r)<br />
= − +<br />
µ ⎜ 5 3<br />
r r ⎟<br />
⎝ ⎠<br />
E<br />
2 2<br />
1 2 k<br />
= µ rɺ<br />
− l<br />
4<br />
2 2µ<br />
r<br />
แบบฝึ กหัด <strong>3.</strong>20 จากข้อทีNผ่านมา สมมุติให้ ณ เวลา t = 0 reduced mass อยู่ ณ รัศมี<br />
r 0 มุม θ 0 และกําลังโดนเหวีNยงด้วยอัตราเร็วเชิงมุม ɺ θ ( t = 0) = ω a) จงแสดงว่า 0<br />
r และ θ<br />
เปลีNยนแปลงกับเวลาอย่างไร b) ต้องรออีกนานเท่าใด กว่ารัศมีจะออกมาอยู ่ ณ 4 เท่าของรัศมีเดิม<br />
เฉลย a)<br />
⎛ ω0<br />
⎞<br />
r( t) = r0<br />
⎜3 t + 1⎟<br />
⎝ θ0<br />
⎠<br />
1<br />
3<br />
และ<br />
⎛ ω0<br />
⎞<br />
θ ( t) = θ0<br />
⎜3 t + 1⎟<br />
⎝ θ0<br />
⎠<br />
1<br />
3<br />
θ0<br />
และ b) ( 4 3 − 1)<br />
แบบฝึ กหัด <strong>3.</strong>21 เมืNอวิเคราะห์ดาวเคราะห์ขนาดเล็กมากมวล m โคจรรอบดาวฤกษ์ขนาดใหญ่มวล<br />
M ตามหลักการ ต้องมองว่าเป็น reduced mass µ เคลืNอนทีNเป็นวง r = r( θ ) แต่บางครั Wงโดย<br />
อนุโลมเรามองว่าเป็นมวล m โคจรรอบดาวฤกษ์<br />
3ω<br />
0<br />
สมมุติว่าดาวฤกษ์มีมวลเป็น 100 เท่าของดาวเคราะห์ จงหาว่ามวล m และ reduced mass µ<br />
ต่างกันกีNเปอร์เซ็นต์<br />
เฉลย 1%<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-57<br />
แบบฝึ กหัด <strong>3.</strong>22 วัตถุมวล m อยู่ในวงโคจร ภายใต้สนามโน้มถ่วงทีNมีค่าคงทีN k โดยทีNวงโคจร<br />
เป็นวงกลมซึ Nงมีรัศมี r 1 จะต้องเร่งให้อัตราเร็วเพิ Nมขึ Wนกว่าเดิมกีNเท่า จึงจะโคจรเป็นรูป parabola<br />
เฉลย 2 เท่า<br />
แบบฝึ กหัด <strong>3.</strong>23 ดาวเคราะห์มวล m โคจรเป็นวงกลมด้วยรัศมี R รอบดวงอาทิตย์มวล M ⊙ ถ้า<br />
สมมุติให้ M⊙ ≫ m และเมืNอเวลา t = 0 มุม θ = 0 พอดี จงแสดงให้เห็นว่า<br />
2π<br />
GM⊙<br />
θ ( t)<br />
= t = t<br />
τ<br />
3 2<br />
R<br />
แบบฝึ กหัด <strong>3.</strong>24 ดาวเคราะห์มวล m 1 และ m 2 โคจรเป็นวงกลมด้วยรัศมี R 1 และ R 2 รอบดวง<br />
อาทิตย์มวล M⊙ ≫ m1 , m2<br />
จงวาดภาพเพืNอแสดงให้เห็นว่า ดวงอาทิตย์ และ ดาวเคราะห์ทั Wงสอง<br />
จะอยู ่ในแนวเส้นตรงเดียวกันเมืNอ<br />
Alignment θ1 − θ2 = nπ<br />
เมืNอ n เป็นจํานวนเต็มคู่ - ดาวเคราะห์ทั Wงสองจะอยู ่ใกล้กันทีNสุด<br />
n เป็นจํานวนเต็มคีN - ดาวเคราะห์ทั Wงสองจะอยู ่ไกลกันทีNสุด<br />
แบบฝึ กหัด <strong>3.</strong>25 กาลครั Wงหนึ Nงมีระบบสุริยะในกาแลกซีไกลโพ้น มนุษย์อาศัยอยู ่บนดาวเคราะห์<br />
Krypton ซึ Nงโคจรรอบดวงอาทิตย์เป็นวงกลมใช้เวลา 1 ปี ณ รัศมีไกลออกไป λ เท่า ดาวเคราะห์<br />
ชืNอ Xenon โคจรเป็นวงกลมเช่นเดียวกัน<br />
ดาวตั<br />
งแถว แนวเดียวกัน ประจันหน้า<br />
ต่างก็ท้า เข้าประชิด ผิดวิสัย<br />
ในครานี มิอาจป้ อง ผองภัย<br />
จึงเตือนไว้ อีก ____ ปี จะมีมา<br />
วันหนึ Nง เกิดดวงอาทิตย์ ดาว Krypton และ ดาว Xenon มาเรียงตัวกัน เกิดอาเพศสงครามไปทั Nว ว่า<br />
แล้วพระอาจารย์จึงจับดวงเมือง และบันทึกในหลักศิลาเพืNอเตือนภัยให้เตรียมการป้ องกันเหตุการณ์ทีN<br />
จะเกิดซํ Wารอยในอนาคต จะเกิดเหตุการณ์เช่นนี WอีกกีNปี<br />
เฉลย<br />
n<br />
2<br />
2 −<br />
λ λ<br />
ปี n = 1<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012
Classical Mechanics ระดับอุดมศึกษา 3 <strong>Central</strong> <strong>Force</strong> <strong>Motion</strong> 3-58<br />
แบบฝึ กหัด <strong>3.</strong>26 โลกและดาวอังคาร จะโคจรเข้าใกล้กันมากทีNสุด ทุกๆ 780 วัน ซึ Nงเป็นคาบเวลาทีN<br />
เรียกโดยทั Nวไปว่า Earth-Mars Synodic Period จงใช้ข้อมูลในภาพ (<strong>3.</strong>13) เพืNอคํานวณระยะเวลา<br />
ดังกล่าว<br />
2<br />
× 365 ≅ 780<br />
2<br />
2 −<br />
1.5237 1.5237<br />
เฉลย ( )<br />
วัน<br />
Dr. Teepanis Chachiyo <strong>ภาควิชาฟิสิกส์</strong> <strong>มหาวิทยาลัยขอนแก่น</strong> teepanis@kku.ac.th Draft May 2012