Dispense Metodi Matematici per le Applicazioni - Dipartimento di ...
Dispense Metodi Matematici per le Applicazioni - Dipartimento di ...
Dispense Metodi Matematici per le Applicazioni - Dipartimento di ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Università degli Stu<strong>di</strong><br />
<strong>di</strong> Firenze<br />
<strong>Dipartimento</strong> <strong>di</strong> Matematica<br />
“Ulisse Dini”<br />
Appunti del corso<br />
<strong>Meto<strong>di</strong></strong> <strong>Matematici</strong><br />
<strong>per</strong> <strong>le</strong> <strong>Applicazioni</strong><br />
Luigi Bar<strong>le</strong>tti<br />
<strong>Dipartimento</strong> <strong>di</strong> Matematica “Ulisse Dini”<br />
Università degli Stu<strong>di</strong> <strong>di</strong> Firenze<br />
Anno Accademico 2010/2011<br />
Disponibi<strong>le</strong> on-line all’in<strong>di</strong>rizzo: www.math.unifi.it/users/bar<strong>le</strong>tti/<br />
Tutti i <strong>di</strong>ritti riservati. Sono vietate la riproduzione e la <strong>di</strong>ffusione, anche parziali, senza<br />
l’esplicita autorizzazione da parte dell’autore.
In<strong>di</strong>ce<br />
1 Serie <strong>di</strong> Fourier 1<br />
1.1 Serie <strong>di</strong> Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
1.2 Corda vibrante con estremi fissi . . . . . . . . . . . . . . . . . . . 10<br />
1.3 Prob<strong>le</strong>ma del “tamburo rettangolare” . . . . . . . . . . . . . . . 16<br />
2 Prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong> 21<br />
2.1 Prob<strong>le</strong>ma del tamburo circolare . . . . . . . . . . . . . . . . . . . 21<br />
2.2 Una classe <strong>di</strong> prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong> . . . . . . . . . . . . . 27<br />
2.3 Armoniche Sferiche . . . . . . . . . . . . . . . . . . . . . . . . . . 32<br />
2.4 Il modello quantistico dell’atomo d’idrogeno . . . . . . . . . . . . 37<br />
3 Trasformate <strong>di</strong> Fourier 42<br />
3.1 Trasformata <strong>di</strong> Fourier <strong>di</strong> funzioni integrabili . . . . . . . . . . . 42<br />
3.2 Teoremi <strong>di</strong> inversione . . . . . . . . . . . . . . . . . . . . . . . . . 50<br />
3.3 Trasformata <strong>di</strong> Fourier <strong>di</strong> funzioni L 2 . . . . . . . . . . . . . . . . 55<br />
3.4 Soluzione <strong>di</strong> equazioni al<strong>le</strong> derivate parziali . . . . . . . . . . . . 58<br />
3.4.1 Equazioni del trasporto e dal calore . . . . . . . . . . . . 58<br />
3.4.2 Equazione del<strong>le</strong> onde . . . . . . . . . . . . . . . . . . . . . 59<br />
4 Distribuzioni 62<br />
4.1 Distribuzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
4.2 Derivazione <strong>di</strong> <strong>di</strong>stribuzioni . . . . . . . . . . . . . . . . . . . . . 65<br />
4.3 Trasformata <strong>di</strong> Fourier <strong>di</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate . . . . . . . . . 68<br />
4.4 Soluzione dell’equazione <strong>di</strong> Poisson . . . . . . . . . . . . . . . . . 77<br />
4.5 Soluzione dell’equazione del<strong>le</strong> onde in R 3 e in R 2 . . . . . . . . . 79<br />
4.6 Distribuzione delta <strong>per</strong>io<strong>di</strong>ca . . . . . . . . . . . . . . . . . . . . 82<br />
5 Semigruppi 85<br />
5.1 Semigruppi <strong>di</strong> o<strong>per</strong>atori . . . . . . . . . . . . . . . . . . . . . . . 85<br />
5.2 Gruppo generato da un o<strong>per</strong>atore limitato . . . . . . . . . . . . . 88<br />
5.3 Cenni sul caso del generatore non-limitato . . . . . . . . . . . . . 90<br />
5.4 Sorgenti e <strong>per</strong>turbazioni . . . . . . . . . . . . . . . . . . . . . . . 95<br />
5.5 Equazione <strong>di</strong> trasporto con collisioni . . . . . . . . . . . . . . . . 100<br />
A Richiami su spazi lineari e spazi L p 106<br />
ii
INDICE<br />
iii<br />
B Esercizi 111<br />
Bibliografia 117
Capitolo 1<br />
Serie <strong>di</strong> Fourier<br />
1.1 Serie <strong>di</strong> Fourier<br />
Consideriamo una funzione f : R → C che sia 2π-<strong>per</strong>io<strong>di</strong>ca, ovvero ta<strong>le</strong> che<br />
f(x+2π) = f(x), <strong>per</strong> ogni x ∈ R.<br />
Stu<strong>di</strong>eremo la possibilità <strong>di</strong> sviluppare ta<strong>le</strong> funzione in una serie del tipo<br />
f(x) =<br />
n∈Zf ∑ n e inx . (1.1)<br />
La (1.1) <strong>per</strong> il momento si deve intendere soltanto come un’espressione forma<strong>le</strong><br />
il cui significato preciso si delineerà attraverso i risultati che <strong>di</strong>mostreremo in<br />
seguito. Osserviamo innanzitutto che dall’identità<br />
∫<br />
1 π<br />
e inx dx =<br />
2π −π<br />
{<br />
1, se n = 0<br />
0, se n ∈ Z\{0}<br />
(1.2)<br />
segue, almeno formalmente,<br />
f n = 1<br />
2π<br />
∫ π<br />
−π<br />
f(x)e −inx dx. (1.3)<br />
Notiamo che, se f ∈ L 1 (−π,π) i numeri comp<strong>le</strong>ssi f n sono ben definiti e prendono<br />
il nome <strong>di</strong> coefficienti <strong>di</strong> Fourier (CdF) <strong>di</strong> f. Anche se i CdF <strong>di</strong> f sono<br />
ben definiti, la serie a secondo membro della (1.1), che <strong>di</strong>remo serie <strong>di</strong> Fourier<br />
(SdF) <strong>di</strong> f, non è necessariamente convergente.<br />
Osservazione 1.1 Supponiamo che f assuma solamente valori reali. In questo<br />
caso si ha<br />
f n = f −n<br />
<strong>per</strong> cui possiamo scrivere<br />
∑ ∞∑<br />
f n e inx (<br />
= f 0 + fn e inx +f −n e −inx) ∞∑<br />
= f 0 + 2Re ( f n e inx)<br />
n∈Z<br />
n=1<br />
1<br />
n=1
CAPITOLO 1. SERIE DI FOURIER 2<br />
= f 0 +<br />
∞∑<br />
2(Ref n cos(nx)−Imf n sin(nx)).<br />
n=1<br />
Si ottiene così la serie <strong>di</strong> Fourier rea<strong>le</strong><br />
dove<br />
f(x) = f 0 +<br />
∞∑<br />
a n cos(nx)+b n sin(nx), (1.4)<br />
n=1<br />
f 0 = 1 ∫ π<br />
f(x)dx,<br />
2π −π<br />
a n = 2Ref n = 1 π<br />
b n = −2Imf n = 1 π<br />
∫ π<br />
−π<br />
∫ π<br />
−π<br />
f(x) cos(nx)dx, n ≥ 1,<br />
f(x) sin(nx)dx, n ≥ 1.<br />
(1.5)<br />
Ogni risultato <strong>di</strong>mostrato <strong>per</strong> la SdF comp<strong>le</strong>ssa varrà in particolare <strong>per</strong> la SdF<br />
rea<strong>le</strong>.<br />
Per prima cosa ci occupiamo della convergenza puntua<strong>le</strong>.<br />
Lemma 1.2 (Disuguaglianza <strong>di</strong> Bessel) Se f ∈ L 2 (−π,π) si ha<br />
∑<br />
n∈Z<br />
In particolare, lim n→±∞ f n = 0.<br />
|f n | 2 ≤ 1<br />
2π<br />
∫ π<br />
−π<br />
|f(x)| 2 dx. (1.6)<br />
Dimostrazione Per ogni N = 0,1,2,... e <strong>per</strong> ogni x ∈ R poniamo<br />
s N (x) :=<br />
N∑<br />
n=−N<br />
f n e inx . (1.7)<br />
Utilizzando la relazione (1.2) e la definizione (1.3), possiamo scrivere<br />
=<br />
∫ π<br />
−π<br />
0 ≤<br />
∫ π<br />
−π<br />
∫ π<br />
|f(x)| 2 dx+ |s N (x)| 2 dx−<br />
−π<br />
∫ π<br />
N∑<br />
= |f(x)| 2 dx+2π<br />
−π<br />
=<br />
∫ π<br />
−π<br />
|f(x)−s N (x)| 2 dx<br />
∫ π<br />
−π<br />
n=−N<br />
|f(x)| 2 dx−2π<br />
Dunque <strong>per</strong> ogni N = 0,1,2,... si ha<br />
N∑<br />
n=−N<br />
∫ π<br />
f(x)s N (x)dx− f(x)s N (x)dx<br />
−π<br />
} {|f n | 2 −f n f n −f n f n<br />
N∑<br />
n=−N<br />
|f n | 2 .<br />
|f n | 2 ≤ 1 ∫ π<br />
|f(x)| 2 dx,<br />
2π −π
CAPITOLO 1. SERIE DI FOURIER 3<br />
da cui segue la tesi passando al limite <strong>per</strong> N → ∞.<br />
□<br />
Dimostriamo ora che la proprietà <strong>di</strong> deca<strong>di</strong>mento dei coefficienti <strong>di</strong> Fourier <strong>per</strong><br />
n → ∞ va<strong>le</strong> più in genera<strong>le</strong> <strong>per</strong> <strong>le</strong> funzioni <strong>di</strong> classe L 1 .<br />
Corollario 1.3 (Lemma <strong>di</strong> Riemann-Lebesgue <strong>per</strong> <strong>le</strong> serie <strong>di</strong> Fourier)<br />
Se f ∈ L 1 (−π,π) si ha lim n→±∞ f n = 0.<br />
Dimostrazione PoichéC0 ∞ (−π,π) èdensoinL 1 (−π,π) (TeoremaA.8), fissato<br />
ǫ > 0 esiste ϕ ∈ C0 ∞(−π,π) ta<strong>le</strong> che ∫ π<br />
|f(x)−ϕ(x)|dx ≤ ǫ. Possiamo <strong>per</strong>ciò<br />
−π<br />
scrivere<br />
∫ π<br />
∫ π<br />
∫ π<br />
∣ f(x)e −inx dx∣ ≤ ∣ (f −ϕ)(x)e −inx ∣<br />
dx∣+<br />
∣ ϕ(x)e −inx dx∣<br />
−π<br />
≤<br />
∫ π<br />
−π<br />
−π<br />
|f(x)−ϕ(x)|dx+ ∣<br />
∫ π<br />
−π<br />
−π<br />
ϕ(x)e −inx ∣<br />
dx∣.<br />
Poiché la tesi va<strong>le</strong> <strong>per</strong> ϕ (che sta in L 2 (−π,π)), l’ultimo integra<strong>le</strong> (che è il<br />
coefficiente <strong>di</strong> Fourier <strong>di</strong> ϕ moltiplicato <strong>per</strong> 2π) è in modulo più piccolo <strong>di</strong> ǫ <strong>per</strong><br />
|n| sufficientemente grande. Per tali n si ha quin<strong>di</strong> | ∫ π<br />
−π f(x)e−inx dx| ≤ 2ǫ, da<br />
cui la tesi.<br />
□<br />
Consideriamo ora, <strong>per</strong> ogni N = 0,1,2,..., la seguente funzione<br />
D N (x) :=<br />
N∑<br />
n=−N<br />
e inx , x ∈ R, (1.8)<br />
detta nuc<strong>le</strong>o <strong>di</strong> Dirich<strong>le</strong>t. Il nuc<strong>le</strong>o <strong>di</strong> Dirich<strong>le</strong>t ci <strong>per</strong>mette <strong>di</strong> scrivere <strong>le</strong> somme<br />
parziali (1.7) in forma <strong>di</strong> convoluzione. Infatti si ha<br />
s N (x) =<br />
N∑<br />
n=−N<br />
∫ π<br />
= 1<br />
2π<br />
−π<br />
e inx<br />
2π<br />
∫ π<br />
−π<br />
f(y)e −iny dy<br />
f(y)D N (x−y)dy = 1<br />
2π<br />
∫ π<br />
−π<br />
f(x−y)D N (y)dy<br />
dove, all’ultimo passaggio, si è sfruttata la <strong>per</strong>io<strong>di</strong>cità <strong>di</strong> f e D N .<br />
Moltiplicando D N (x) <strong>per</strong> e ix −1 si ottiene<br />
(1.9)<br />
(e ix −1)D N (x) =<br />
e, moltiplicando <strong>per</strong> e −ix/2 ,<br />
ovvero<br />
N∑<br />
n=−N<br />
e i(n+1)x −e inx = e i(N+1)x −e −iNx<br />
(e ix/2 −e −ix/2 )D N (x) = e i(N+1/2)x −e −i(N+1/2)x ,<br />
D N (x) = sin(N + 1 2 )x<br />
sin x 2<br />
. (1.10)<br />
La rappresentazione del<strong>le</strong> somme parziali come convoluzione col nuc<strong>le</strong>o <strong>di</strong> Dirich<strong>le</strong>t<br />
ci <strong>per</strong>mette <strong>di</strong> <strong>di</strong>mostrare un importante risultato <strong>di</strong> convergenzapuntua<strong>le</strong><br />
della serie <strong>di</strong> Fourier.
CAPITOLO 1. SERIE DI FOURIER 4<br />
Teorema 1.4 Sia f : R → C una funzione 2π-<strong>per</strong>io<strong>di</strong>ca ta<strong>le</strong> che f ∈ L 1 (−π,π)<br />
e sia x ∈ R un punto dove esistono i limiti destro f + (x) e sinistro f − (x), ed<br />
esiste δ > 0 ta<strong>le</strong> che<br />
∫ δ<br />
0<br />
∫ δ<br />
0<br />
|f(x+h)−f + (x)|<br />
h<br />
|f(x−h)−f − (x)|<br />
h<br />
dh < ∞<br />
dh < ∞<br />
(1.11)<br />
(detta “con<strong>di</strong>zione del Dini”). Allora<br />
∑<br />
f n e inx = 1 [<br />
f + (x)+f − (x) ] . (1.12)<br />
2<br />
n∈Z<br />
In particolare, si vede facilmente che la serie <strong>di</strong> Fourier converge puntualmente<br />
a f nei punti in cui questa è Lipschitziana.<br />
∫<br />
Dimostrazione Dalla definizione (1.8) segue che 1 π<br />
2π −π D N(y)dy = 1 e,<br />
poiché D N è una funzione pari,<br />
1<br />
2π<br />
∫ π<br />
0<br />
D N (y)dy = 1<br />
2π<br />
∫ 0<br />
Dunque, usando la (1.10) e la (1.9), potremo scrivere<br />
= 1 π<br />
∫ 0<br />
−π<br />
= 1 π<br />
−π<br />
D N (y)dy = 1 2 .<br />
s N (x)− 1 [<br />
f + (x)+f − (x) ]<br />
2<br />
f(x−y)−f + (x)<br />
D N (y)dy + 1 ∫ π<br />
f(x−y)−f − (x)<br />
D N (y)dy<br />
2 π 2<br />
∫ π<br />
−π<br />
∫ π<br />
= 1 g x (y) sin ( N +<br />
π<br />
2) 1 ydy<br />
−π<br />
∫<br />
[<br />
gx (y)cos y 1 π<br />
[<br />
2]<br />
sinNydy + gx (y)sin y ]<br />
π<br />
2 cosNydy<br />
dove la funzione g x (y) è così definita:<br />
⎧<br />
f(x−y)−f + (x)<br />
⎪⎨ 2sin y , <strong>per</strong> y ∈ [−π,0),<br />
2<br />
g x (y) := 0, <strong>per</strong> y = 0,<br />
f(x−y)−f<br />
⎪⎩<br />
− (x)<br />
2sin y , <strong>per</strong> y ∈ (0,π).<br />
2<br />
Dalla con<strong>di</strong>zione del Dini segue che la funzione g x (y) è integrabi<strong>le</strong> nell’intorno<br />
dell’origine I = (−δ,δ). Inoltre g x (y) è <strong>di</strong> classe L 1 in (−π,π) \ I (essendo<br />
f ∈ L 1 (−π,π) e |sin y 2 | > 0 fuori da I). Dunque <strong>le</strong> funzioni g x(y)cos y 2 e<br />
g x (y)sin y 2 sono <strong>di</strong> classe L1 (−π,π) e quin<strong>di</strong> (Corollario 1.3) i loro CdF reali<br />
1<br />
π<br />
∫ π<br />
−π<br />
[<br />
gx (y)cos y 2]<br />
sinNydy,<br />
1<br />
π<br />
tendono a zero <strong>per</strong> N → ∞, da cui la tesi.<br />
0<br />
−π<br />
∫ π<br />
Dimostriamo ora un risultato <strong>di</strong> convergenza uniforme.<br />
−π<br />
[<br />
gx (y)sin y ]<br />
2 cosNydy,<br />
□
CAPITOLO 1. SERIE DI FOURIER 5<br />
Teorema 1.5 Sia f : R → C una funzione 2π-<strong>per</strong>io<strong>di</strong>ca, continua e regolare a<br />
tratti. 1 Allora ∑<br />
|f n | < ∞ (1.13)<br />
n∈Z<br />
e la serie <strong>di</strong> Fourier converge a f uniformemente su R.<br />
Dimostrazione La derivata f ′ <strong>di</strong> f è limitata con un numero finito <strong>di</strong> <strong>di</strong><br />
<strong>di</strong>scontinuità <strong>di</strong> prima specie <strong>per</strong> cui, in<strong>di</strong>cati con f n ′ i CdF <strong>di</strong> f′ , si <strong>di</strong>mostra<br />
facilmente che è possibi<strong>le</strong> integrare <strong>per</strong> parti in (1.3) ottenendo<br />
f n = i ∣ ∣∣<br />
π<br />
2nπ f(x)e−inx − i ∫ π<br />
f ′ (x)e −inx dx = − i<br />
−π 2nπ −π n f′ n.<br />
(<br />
Pertanto, utilizzando la <strong>di</strong>suguaglianza ab ≤ 1 2 a 2 +b 2) ,<br />
|f n | = |f′ n|<br />
n ≤ 1 (|f ′<br />
2<br />
n| 2 + 1 )<br />
n 2 .<br />
Poiché chiaramente f ′ ∈ L 2 (−π,π), <strong>per</strong> i coefficienti f n ′ va<strong>le</strong> la <strong>di</strong>suguaglianza<br />
<strong>di</strong> Bessel (1.6), <strong>per</strong> cui si ha<br />
∑<br />
|f n | ≤ ∑ 1<br />
(|f<br />
2<br />
n| ′ 2 + 1 )<br />
n 2 < +∞.<br />
n∈Z n∈Z<br />
Dunque la serie <strong>di</strong> Fourier <strong>di</strong> f risulta uniformemente convergente. Poiché in<br />
ogni punto x esistono finiti i limiti destro e sinistro <strong>di</strong> f ′ , si può verificare<br />
facilmente che la con<strong>di</strong>zione del Dini è sod<strong>di</strong>sfatta e possiamo concludere dal<br />
Teorema 1.4 che la serie <strong>di</strong> Fourier converge proprio a f. □<br />
Osservazione 1.6 Il precedente teorema va<strong>le</strong> nell’ipotesi più genera<strong>le</strong> che f :<br />
R → C sia 2π-<strong>per</strong>io<strong>di</strong>ca, assolutamente continua su R e ta<strong>le</strong> che f ′ ∈ L 2 (−π,π).<br />
Ricor<strong>di</strong>amo che una funzione f si <strong>di</strong>ce assolutamente continua (AC) su un intervallo<br />
[a,b] se <strong>per</strong> ogni ǫ > 0 esiste δ ta<strong>le</strong> che ∑ n<br />
i=1 |f(x i)−f(y i )| < ǫ <strong>per</strong> ogni<br />
col<strong>le</strong>zione finita <strong>di</strong> intervalli <strong>di</strong>sgiunti (x 1 ,y 1 ), (x 2 ,y 2 ), ..., (x n ,y n ) contenuti<br />
in [a,b] e tali che ∑ n<br />
i=1 y i−x i < δ. Si <strong>di</strong>ce poi che f è AC su R se è AC su ogni<br />
[a,b] ⊂ R.<br />
il risultato fondamenta<strong>le</strong> sul<strong>le</strong> funzioni AC è il seguente. Se f è AC su [a,b]<br />
allora f ′ esiste quasi ovunque con f ′ ∈ L 1 (a,b) e si ha f(y)−f(x) = ∫ y<br />
x f′ (t)dt,<br />
<strong>per</strong> ogni a ≤ x ≤ y ≤ b. Viceversa, se g ∈ L 1 (a,b), allora la funzione ∫ x<br />
a g(t)dt<br />
è AC su [a,b] e ha quasi ovunque <strong>per</strong> derivata g. Dunque si può sinteticamente<br />
<strong>di</strong>re che <strong>le</strong> funzioni assolutamente continue sono quel<strong>le</strong> <strong>per</strong> cui va<strong>le</strong> il teorema<br />
fondamenta<strong>le</strong> del calcolo (ve<strong>di</strong> [9]).<br />
1 Per funzione “regolare a tratti” in un intervallo [a,b] ⊂ R si intende che la funzione è<br />
derivabi<strong>le</strong> in [a,b] tranne che in un numero finito <strong>di</strong> punti, in cui <strong>per</strong>ò esistono finiti i limiti<br />
destro e sinistro della derivata. Inoltre, <strong>di</strong>ciamo che una funzione è regolare a tratti in R se<br />
lo è in ogni intervallo [a,b] ⊂ R.
CAPITOLO 1. SERIE DI FOURIER 6<br />
La <strong>di</strong>mostrazione del Teorema 1.5 in queste ipotesi è sostanzialmente identica a<br />
quella fornita sopra. L’unica cosa che cambia è la verifica della con<strong>di</strong>zione del<br />
Dini, che è un po’ più delicata: posto x = 0 <strong>per</strong> semplicità possiamo scrivere<br />
∫ δ<br />
0<br />
=<br />
|f(h)−f(0)|<br />
h<br />
∫ δ<br />
0<br />
dh ≤<br />
∫ δ ∫ h<br />
0<br />
0<br />
|f ′ (ξ)|<br />
h<br />
dξdh =<br />
∫ δ ∫ δ<br />
0<br />
ξ<br />
|f ′ (ξ)|<br />
h<br />
|f ′ (ξ)|log(δ/ξ)dξ ≤ ‖f ′ ‖ L2 (0,δ) ‖log(δ/ξ)‖ L 2 (0,δ) < ∞,<br />
dhdξ<br />
dove si è usata la <strong>di</strong>suguaglianza <strong>di</strong> Hölder (si lascia al <strong>le</strong>ttore la verifica del<br />
fatto che log(δ/ξ) ∈ L 2 (0,δ)). La verifica della con<strong>di</strong>zione del Dini da sinistra<br />
si fa allo stesso modo.<br />
Il successivo risultato riguarda la convergenza “in me<strong>di</strong>a quadratica”, cioè nella<br />
norma L 2 . Si tratta <strong>di</strong> una convergenza particolarmente “natura<strong>le</strong>” <strong>per</strong> la serie<br />
<strong>di</strong> Fourier in quanto, come sarà sottolineato più avanti, questo risultato ha una<br />
chiara interpretazione nell’ambito della teoria degli spazi <strong>di</strong> Hilbert.<br />
Teorema 1.7 Se f ∈ L 2 (−π,π) si ha che<br />
∫ π<br />
lim<br />
N→∞ −π<br />
e inoltre, se anche g ∈ L 2 (−π,π),<br />
1<br />
2π<br />
∫ π<br />
|f(x)−s N (x)| 2 dx = 0 (1.14)<br />
−πf(x)g(x)dx = ∑ n∈Z<br />
In particolare, prendendo g = f, si avrà<br />
1<br />
2π<br />
∫ π<br />
−π<br />
|f(x)| 2 dx = ∑ n∈Z<br />
formula nota come Teorema <strong>di</strong> Parseval.<br />
f n g n . (1.15)<br />
|f n | 2 , (1.16)<br />
Dimostrazione Ricor<strong>di</strong>amo che L 2 (−π,π) è uno spazio <strong>di</strong> Hilbert con il<br />
prodotto hermitiano<br />
〈f,g〉 :=<br />
∫ π<br />
−π<br />
f(x)g(x)dx, f,g ∈ L 2 (−π,π) (1.17)<br />
e la norma ‖f‖ 2<br />
= 〈f,f〉 1/2 = (∫ π<br />
−π |f(x)|2 dx ) 1/2<br />
. È noto che <strong>le</strong> funzioni <strong>di</strong><br />
classe C ∞ 0 (−π,π) formano un sottospazio denso <strong>di</strong> L2 (−π,π) (Teorema A.8)<br />
<strong>per</strong> cui, fissato ǫ > 0, esiste una funzione ϕ ∈ C ∞ 0 (−π,π) ta<strong>le</strong> che<br />
‖f −ϕ‖ 2<br />
≤ ǫ/3.<br />
È evidente che ϕ può essere estesa <strong>per</strong>io<strong>di</strong>camente a una funzione <strong>di</strong> classe<br />
C 1 (R). In base al teorema precedente, la serie <strong>di</strong> Fourier <strong>di</strong> ϕ converge a ϕ<br />
uniformemente su R (e quin<strong>di</strong> anche in norma L 2 su (−π,π)). Siano ϕ n i
CAPITOLO 1. SERIE DI FOURIER 7<br />
coefficienti <strong>di</strong> Fourier <strong>di</strong> ϕ e sia σ N (x) := ∑ N<br />
n=−N ϕ ne inx la corrispondente<br />
successione del<strong>le</strong> somme parziali. Per N sufficientemente grande si avrà dunque<br />
‖ϕ−σ N ‖ 2<br />
≤ ǫ/3.<br />
I coefficienti <strong>di</strong> Fourier e <strong>le</strong> somme parziali <strong>di</strong> f −ϕ sono dati, rispettivamente,<br />
da f n −ϕ n e da s N (x)−σ N (x). Poiché f−ϕ ∈ L 2 (−π,π), dalla <strong>di</strong>suguaglianza<br />
<strong>di</strong> Bessel segue<br />
‖s N −σ N ‖ 2<br />
≤<br />
(<br />
2π ∑ |f n −ϕ n | 2) 1/2<br />
≤ ‖f −ϕ‖2 ≤ ǫ/3.<br />
n∈Z<br />
Pertanto, usando la <strong>di</strong>suguaglianza triangolare, si ottiene<br />
‖f −s N ‖ 2<br />
≤ ‖f −ϕ‖ 2<br />
+‖ϕ−σ N ‖ 2<br />
+‖σ N −s N ‖ 2<br />
≤ ǫ,<br />
il che prova il risultato <strong>di</strong> convergenza (1.14). Per <strong>di</strong>mostrare la (1.15) osserviamo<br />
che<br />
cioè<br />
∫<br />
1 π<br />
s N (x)g(x)dx = 1<br />
2π −π 2π<br />
N∑<br />
n=−N<br />
1<br />
2π 〈s N,g〉 =<br />
∫ π<br />
f n e inx g(x)dx =<br />
N∑<br />
−π<br />
n=−N<br />
f n g n .<br />
N∑<br />
n=−N<br />
f n g n ,<br />
Ricordando che il prodotto Hermitiano in uno spazio <strong>di</strong> Hilbert è continuo,<br />
passando al limite <strong>per</strong> N → +∞ si ottiene la (1.15).<br />
□<br />
Come corollario imme<strong>di</strong>ato del precedente teorema si ha l’univocità dei coefficienti<br />
<strong>di</strong> Fourier <strong>per</strong> <strong>le</strong> funzioni L 2 .<br />
Corollario 1.8 Siano f e g due funzioni <strong>di</strong> classe L 2 (−π,π) con gli stessi<br />
coefficienti <strong>di</strong> Fourier. Allora f(x) = g(x) quasi ovunque.<br />
Dimostrazione Poiché i coefficienti <strong>di</strong> Fourier <strong>di</strong> h := f −g sono tutti nulli,<br />
dal teorema <strong>di</strong> Parseval segue che ‖h‖ 2<br />
= 0 e quin<strong>di</strong> h(x) = 0 quasi ovunque. □<br />
Osservazione 1.9 Se f assume solo valori reali, utilizzando <strong>le</strong> relazioni f n =<br />
1<br />
2 (a n −ib n ), f −n = 1 2 (a n +ib n ) (che seguono dalla definizione (1.5) <strong>di</strong> a n e b n )<br />
si ottiene il teorema <strong>di</strong> Parseval rea<strong>le</strong>:<br />
1<br />
2π<br />
∫ π<br />
−π<br />
|f(x)| 2 dx = f 2 0 +<br />
∞∑<br />
n=1<br />
a 2 n +b 2 n<br />
. (1.18)<br />
2<br />
Come abbiamo anticipato, il risultato del Teorema 1.7 ha un chiaro significato<br />
geometrico nell’ambito della teoria degli spazi <strong>di</strong> Hilbert.
CAPITOLO 1. SERIE DI FOURIER 8<br />
Corollario 1.10 Posto<br />
e n (x) := 1 √<br />
2π<br />
e inx , (1.19)<br />
l’insieme B := {e n | n ∈ Z} è una base ortonorma<strong>le</strong> dello spazio <strong>di</strong> Hilbert<br />
L 2 (−π,π), ovvero un sottoinsieme numerabi<strong>le</strong>, ortonorma<strong>le</strong> e comp<strong>le</strong>to. 2<br />
Dimostrazione L’ortonormalità <strong>di</strong> B segue dall’eq. (1.2) che implica<br />
〈e m ,e n 〉 = δ mn , m,n ∈ Z. (1.20)<br />
La comp<strong>le</strong>tezza <strong>di</strong> B segue dal Teorema 1.7, in quanto esso ci <strong>di</strong>ce che ogni<br />
funzione f ∈ L 2 (−π,π) può essere approssimata con precisione arbitraria da<br />
combinazioni lineari finite (<strong>le</strong> somme parziali s N ) del<strong>le</strong> funzioni e n . □<br />
Osservazione 1.11 Osseviamo che il CdF f n è proporziona<strong>le</strong> alla componente<br />
〈f,e n 〉 del “vettore” f nella “<strong>di</strong>rezione” e n :<br />
f n = 1 ∫ π<br />
f(x)e −inx dx = √ 1 〈f,e n 〉.<br />
2π −π 2π<br />
La serie <strong>di</strong> Fourier e il teorema <strong>di</strong> Parseval possono essere quin<strong>di</strong> scritti nella<br />
forma<br />
f = ∑ 〈f,e n 〉e n , ‖f‖ 2 2 = ∑ |〈f,e n 〉| 2 , (1.21)<br />
n∈Z<br />
n∈Z<br />
che va<strong>le</strong>, più in genera<strong>le</strong>, <strong>per</strong> qualunque base ortonorma<strong>le</strong> <strong>di</strong> L 2 (−π,π). Il<br />
teorema <strong>di</strong> Parseval, dunque, non è altro che il teorema <strong>di</strong> Pitagora in uno<br />
spazio a <strong>di</strong>mensione infinita.<br />
Una conseguenza imme<strong>di</strong>ata del Corollario 1.10 è la seguente.<br />
Corollario 1.12 L’applicazione<br />
f ↦→ √ 2π(...,f −1 ,f 0 ,f 1 ,...)<br />
che a f associa la successione dei suoi coefficienti <strong>di</strong> Fourier (moltiplicati <strong>per</strong><br />
√<br />
2π) definisce un isomorfismo isometrico F fra gli spazi <strong>di</strong> Hilbert L 2 (−π,π) e<br />
l 2 (Z,C).<br />
Dimostrazione La <strong>di</strong>mostrazione è lasciata <strong>per</strong> esercizio. Ricor<strong>di</strong>amo che<br />
l 2 (Z,C) è lo spazio <strong>di</strong> Hilbert del<strong>le</strong> successioni (...,a −1 ,a 0 ,a 1 ,...), con a n ∈ C<br />
<strong>per</strong> ogni n ∈ Z, tali che (∑ n∈Z |a n| 2) 1/2<br />
< +∞.<br />
□<br />
2 Per “comp<strong>le</strong>to” si intende che ogni vettore <strong>di</strong> L 2 (−π,π) è approssimabi<strong>le</strong> con precisione<br />
arbitraria tramite combinazioni lineari finite <strong>di</strong> e<strong>le</strong>menti <strong>di</strong> B.
CAPITOLO 1. SERIE DI FOURIER 9<br />
Derivazioni successive Per k = 0,1,2,..., in<strong>di</strong>chiamo con f n (k) i coefficienti<br />
<strong>di</strong> Fourier della derivata k-esima f (k) <strong>di</strong> f. Nel corso della <strong>di</strong>mostrazione del<br />
Teorema 1.5 abbiamo già visto che f n (1) = inf n . Ragionando <strong>per</strong> ricorrenza, se<br />
f ∈ C k (R), si otterrà la seguente formula<br />
f (k)<br />
n = (in) k f n (1.22)<br />
che <strong>le</strong>ga i CdF della f e quelli del<strong>le</strong> sue derivate. Osserviamo quin<strong>di</strong> che la<br />
derivazione <strong>di</strong> f si ri<strong>le</strong>gge sui CdF f n come moltiplicazione <strong>per</strong> in (questo significa,<br />
fra l’altro, che a una maggiore regolarità <strong>di</strong> f corrisponde una maggiore<br />
rapi<strong>di</strong>tà <strong>di</strong> convergenza della SdF). Intuitivamente, si può pensare l’o<strong>per</strong>atore<br />
lineare <strong>di</strong> derivazione d<br />
dx come rappresentato nella base {e n | n ∈ Z} dalla<br />
matrice <strong>di</strong>agona<strong>le</strong> (con infinite righe e infinite colonne)<br />
D nm = 〈 d<br />
dx e m,e n 〉 = inδ nm , n,m ∈ Z.<br />
Convoluzioni Se f e g sono due funzioni 2π-<strong>per</strong>io<strong>di</strong>che, <strong>di</strong> classe L 1 (−π,π),<br />
definiamo la convoluzione <strong>di</strong> f con g come la funzione<br />
(f ∗g)(x) =<br />
∫ π<br />
−π<br />
f(x−y)g(y)dy =<br />
∫ π<br />
−π<br />
f(y)g(x−y)dy = (g ∗f)(x). (1.23)<br />
Risulta che f ∗ g è ancora una funzione 2π-<strong>per</strong>io<strong>di</strong>ca <strong>di</strong> classe L 1 (−π,π). Si<br />
mostri <strong>per</strong> esercizio che i suoi coefficienti <strong>di</strong> Fourier sono dati da:<br />
(f ∗g) n = 2πf n g n .<br />
Dunque, a meno <strong>di</strong> un fattore 2π, l’n-esimo coefficiente della convoluzione <strong>di</strong> f<br />
con g è il prodotto dell’n-esimo coefficiente <strong>di</strong> f con l’n-esimo coefficiente <strong>di</strong> g.<br />
La Serie <strong>di</strong> Fourier come sviluppo <strong>di</strong> Laurent Osserviamo che la SdF<br />
(1.1) può essere riguardata come “traccia” sulla circonferenza unitaria nel piano<br />
comp<strong>le</strong>sso della serie <strong>di</strong> Laurent<br />
f(z) := ∑ n∈Zf n z n . (1.24)<br />
Poiché la parte ascendente della serie <strong>di</strong> Laurent, ∑ +∞<br />
n=0 f nz n , ha un raggio <strong>di</strong><br />
convergenza R, mentre la parte <strong>di</strong>scendente ∑ −∞<br />
n=−1 f nz n ha un “anti-raggio <strong>di</strong><br />
convergenza” r (cioè la serie converge <strong>per</strong> |z| > r e non converge <strong>per</strong> |z| < r),<br />
allora la serie <strong>di</strong> Laurent comp<strong>le</strong>ta avrà una corona circolare <strong>di</strong> convergenza.<br />
La serie <strong>di</strong> Fourier può convergere se r ≤ 1 ≤ R. Nel caso r < 1 < R si ha<br />
che ∑ n∈Z f ne inx ) è una funzione analitica (restrizione al cerchio unitario della<br />
funzione f(z), analitica nella corona circolare r < |z| < R).<br />
Funzioni 2l-<strong>per</strong>io<strong>di</strong>che Sia l > 0. Se f : R → C è 2l-<strong>per</strong>io<strong>di</strong>ca, allora<br />
g(x) := f ( l<br />
π x) è 2π-<strong>per</strong>io<strong>di</strong>ca. Lo sviluppo in SdF <strong>di</strong> g porta a uno sviluppo
CAPITOLO 1. SERIE DI FOURIER 10<br />
in serie <strong>di</strong> Fourier 2l-<strong>per</strong>io<strong>di</strong>ca <strong>di</strong> f:<br />
( π<br />
)<br />
f(x) = g<br />
l x = ∑ n∈Z<br />
f n := g n = 1<br />
2π<br />
= 1 2l<br />
∫ l<br />
−l<br />
∫ π<br />
−π<br />
f n e inπ l x (1.25)<br />
g(x)e −inx dx = 1 ∫ π<br />
( ) l<br />
f<br />
2π −π π x e −inx dx<br />
f(x)e −inπ l x dx.<br />
(1.26)<br />
È evidente che tutti i risultati <strong>di</strong>mostrati <strong>per</strong> la SdF 2π-<strong>per</strong>io<strong>di</strong>ca valgono più<br />
in genera<strong>le</strong> <strong>per</strong> la SdF 2l-<strong>per</strong>io<strong>di</strong>ca (a meno <strong>di</strong> evidenti mo<strong>di</strong>fiche al<strong>le</strong> costanti<br />
che compaiono nel<strong>le</strong> formu<strong>le</strong>).<br />
1.2 Corda vibrante con estremi fissi<br />
Come esempio fondamenta<strong>le</strong> <strong>di</strong> applicazione della serie <strong>di</strong> Fourier, stu<strong>di</strong>amo in<br />
dettaglio il prob<strong>le</strong>ma della corda vibrante con estremi fissi, ovvero l’equazione<br />
del<strong>le</strong> onde uni<strong>di</strong>mensiona<strong>le</strong> con con<strong>di</strong>zioni al contorno <strong>di</strong> Dirich<strong>le</strong>t e dati iniziali<br />
<strong>di</strong> Cauchy: ⎧⎪ ⎨<br />
⎪ ⎩<br />
u tt (x,t) = c 2 u xx (x,t), x ∈ (0,l), t > 0,<br />
u(0,t) = u(l,t) = 0, t ≥ 0,<br />
(1.27)<br />
u(x,0) = ϕ(x), x ∈ (0,l),<br />
u t (x,0) = ψ(x), x ∈ (0,l).<br />
Ta<strong>le</strong> sistema descrive il comportamento <strong>di</strong> un mezzo elastico uni<strong>di</strong>mensiona<strong>le</strong><br />
idea<strong>le</strong> e, in prima approssimazione, può essere usata <strong>per</strong> descrivere <strong>le</strong> vibrazioni<br />
<strong>di</strong> una corda, ad esempio quella <strong>di</strong> uno strumento musica<strong>le</strong>, al variare del tipo <strong>di</strong><br />
eccitazione inizia<strong>le</strong> (pizzicata, <strong>per</strong>cossa, ecc.). In questo caso u(x,t) rappresenta<br />
lo scostamento trasversa<strong>le</strong> della corda nel punto x all’istante t dalla posizione<br />
<strong>di</strong> riposo u(x,t) = 0.<br />
La nostra <strong>di</strong>scussione inizierà in modo “forma<strong>le</strong>”, nel senso che cercheremo <strong>di</strong><br />
ricavareun’espressionedellasoluzionesenzapreoccuparcidellasuaeffettivabuona<br />
definizione, né tantomeno della sua regolarità. La questione se l’espressione<br />
trovata sia effettivamente una soluzione del prob<strong>le</strong>ma, in senso rigoroso, sarà<br />
oggetto <strong>di</strong> una <strong>di</strong>scussione successiva.<br />
Per cominciare, tentiamo una soluzione a variabli separate, cioè del tipo<br />
u(x,t) = X(x)T(t).<br />
Sostituendo nella prima del<strong>le</strong> (1.27) otteniamo<br />
e, <strong>di</strong>videndo <strong>per</strong> c 2 X(x)T(t)<br />
X(x)T ′′ (t) = c 2 X ′′ (x)T(t)<br />
T ′′ (t)<br />
c 2 T(t) = X′′ (x)<br />
X(x) .
CAPITOLO 1. SERIE DI FOURIER 11<br />
Poiché al primo e al secondo membro <strong>di</strong> questa equazione ci sono, rispettivamente,<br />
una funzione della sola t e una funzione della sola x, l’unica possibilità<br />
affinché l’uguaglianza valga <strong>per</strong> ogni x e t è che <strong>le</strong> due espressioni siano costanti.<br />
Dovremo <strong>per</strong>ciò imporre la con<strong>di</strong>zione<br />
T ′′ (t)<br />
c 2 T(t) = X′′ (x)<br />
X(x) = µ (1.28)<br />
doveµèunacostante. Inoltre, lacon<strong>di</strong>zionealcontorno(lasecondadel<strong>le</strong>(1.27))<br />
sarà sicuramente sod<strong>di</strong>sfatta se X(0) = X(l) = 0. Siamo <strong>per</strong>ciò condotti a<br />
risolvere il prob<strong>le</strong>ma (detto <strong>di</strong> Sturm-Liouvil<strong>le</strong>) <strong>di</strong> trovare se esistono costanti µ<br />
e funzioni X tali che<br />
{<br />
X ′′ (x) = µX(x), x ∈ (0,l),<br />
(1.29)<br />
X(0) = X(l) = 0.<br />
Osservazione 1.13 Come vedremo un po’ meglio nel capitolo successivo, il<br />
prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong> (1.29) è interpretabi<strong>le</strong> come il prob<strong>le</strong>ma <strong>di</strong> trovare<br />
gli autovalori <strong>di</strong> un o<strong>per</strong>atore lineare (in questo caso la derivata seconda con<br />
con<strong>di</strong>zioni <strong>di</strong> Dirich<strong>le</strong>t) che agisce su un certo spazio <strong>di</strong> funzioni. Le costanti<br />
µ e <strong>le</strong> corrispondenti funzioni X (non identicamente nul<strong>le</strong>) che risolvono ta<strong>le</strong><br />
prob<strong>le</strong>ma saranno <strong>per</strong>ciò chiamate “autovalori” e “autofuzioni”. In particolare,<br />
l’insieme degli autovalori è chiamato spettro dell’o<strong>per</strong>atore.<br />
La soluzione genera<strong>le</strong> dell’equazione <strong>di</strong>fferenzia<strong>le</strong> X ′′ = µX è<br />
X(x) = ae λx +be −λx , µ = λ 2 , (1.30)<br />
dove a e b sono costanti arbitrarie (in genera<strong>le</strong> comp<strong>le</strong>sse). Imponendo la<br />
con<strong>di</strong>zione X(0) = X(l) = 0 otteniamo il sistema<br />
{<br />
a+b = 0<br />
ae λl +be −λl = 0.<br />
Ta<strong>le</strong> sistema ammette soluzioni che non siano quella bana<strong>le</strong> (a = b = 0), se e<br />
solo se ( ) 1 1<br />
det<br />
e λl e −λl = e −λl (1−e 2λl ) = 0,<br />
ovvero se e solo se<br />
λ = ik n = i nπ<br />
l , n ∈ Z.<br />
Sostituendo ik n <strong>per</strong> λ nella (1.30), e tenuto conto della con<strong>di</strong>zione a = −b, si<br />
ottiene, <strong>per</strong> ogni n ∈ Z fissato, la soluzione<br />
X n (x) = Asin(k n x),<br />
( nπ<br />
µ n = (ik n ) 2 = −<br />
l<br />
con A = 2ia costante arbitraria. Notiamo che <strong>per</strong> n = 0 la soluzione è identicamente<br />
nulla (e quin<strong>di</strong> non è un’autofunzione) e che −n e n danno la stessa<br />
) 2,
CAPITOLO 1. SERIE DI FOURIER 12<br />
soluzione. Prendendo A = 1 abbiamo così in<strong>di</strong>viduato la famiglia <strong>di</strong> coppie<br />
autofunzione-autovalore che risolvono il prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong> (1.29):<br />
X n (x) = sin(k n x), µ n = −k 2 n , k n = nπ l<br />
, n = 1,2,... (1.31)<br />
Adesso, tornando alla (1.28), <strong>per</strong> ogni µ = µ n , troviamo un’equazione <strong>per</strong> T(t),<br />
T ′′ (t) = µ n c 2 T(t) = −(ck n ) 2 T(t),<br />
che, non imponendo ulteriori con<strong>di</strong>zioni, ha la soluzione generica<br />
T n (t) = Acos(ω n t)+Bsin(ω n t), (1.32)<br />
dove si è posto ω n = ck n = cnπ/l, con A e B costanti arbitrarie. Dunque, in<br />
definitiva, <strong>per</strong> ogni n intero positivo, abbiamo trovato una soluzione a variabili<br />
separate<br />
u n (x,t) = X n (x)T n (t) = A n cos(ω n t)sin(k n x)+B n sin(ω n t)sin(k n x), (1.33)<br />
con A n e B n costanti arbitrarie. È chiaro che ogni u n, <strong>per</strong> costruzione, sod<strong>di</strong>sfa<br />
l’equazionedel<strong>le</strong> onde e sod<strong>di</strong>sfa <strong>le</strong> con<strong>di</strong>zionial contorno<strong>di</strong> Dirich<strong>le</strong>t, e lo stesso<br />
si può <strong>di</strong>re <strong>per</strong> ogni combinazione lineare finita del<strong>le</strong> u n . Tuttavia, in genera<strong>le</strong>,<br />
talisoluzioninonsod<strong>di</strong>sfano<strong>le</strong>con<strong>di</strong>zioniiniziali(omegliosod<strong>di</strong>sfanocon<strong>di</strong>zioni<br />
iniziali molto speciali, cioè combinazioni lineari finite <strong>di</strong> seni e coseni). Ma la<br />
teoria della serie <strong>di</strong> Fourier ci <strong>di</strong>ce che ogni funzione definita su un intervallo<br />
(purché sufficientemente regolare) è una combinazione lineare infinita <strong>di</strong> seni<br />
e coseni! Perciò l’idea è quella <strong>di</strong> cercare la soluzione più genera<strong>le</strong> del nostro<br />
prob<strong>le</strong>ma come combinazione lineare infinita del<strong>le</strong> u n :<br />
u(x,t) =<br />
∞∑<br />
A n sin(k n x)cos(ω n t)+B n sin(k n x)sin(ω n t). (1.34)<br />
n=1<br />
Se vogliamo che u sod<strong>di</strong>sfi i dati iniziali, otteniamo <strong>le</strong> con<strong>di</strong>zioni<br />
∞∑<br />
A n sin(k n x) = ϕ(x),<br />
n=1<br />
∞∑<br />
ω n B n sin(k n x) = ψ(x),<br />
n=1<br />
x ∈ (0,l).<br />
Possiamo interpretare queste equazioni come sviluppi in serie <strong>di</strong> Fourier del<strong>le</strong><br />
funzioni ϕ e ψ estese in modo <strong>di</strong>spari (<strong>per</strong>ché sono sviluppi in soli seni) nell’intervallo<br />
[−l,l]. Dunque, <strong>le</strong> con<strong>di</strong>zioni iniziali sono (almeno formalmente)<br />
sod<strong>di</strong>sfatte se A n e ω n B n sono i coefficienti <strong>di</strong> Fourier del<strong>le</strong> funzioni ϕ e ψ,<br />
intese come prolungamento <strong>di</strong>spari, ovvero<br />
A n = 1 l<br />
∫ l<br />
B n = 1<br />
lω n<br />
∫ l<br />
−lϕ(x)sin(k n x)dx = 2 l<br />
−l<br />
∫ l<br />
0<br />
ϕ(x)sin(k n x)dx (1.35)<br />
ψ(x)sin(k n x)dx = 2 ∫ l<br />
ψ(x)sin(k n x)dx. (1.36)<br />
lω n<br />
0
CAPITOLO 1. SERIE DI FOURIER 13<br />
Con ta<strong>le</strong> scelta dei coefficienti A n e B n , la (1.34) è la nostra soluzione forma<strong>le</strong><br />
del prob<strong>le</strong>ma (1.27).<br />
Prima <strong>di</strong> <strong>di</strong>scuterne il significato fisico, preoccupiamoci ora <strong>di</strong> <strong>di</strong>mostrare sotto<br />
quali con<strong>di</strong>zioni la soluzione trovata è effettivamente una soluzione in senso<br />
rigoroso.<br />
Osservazione 1.14 Nonostanteche il prob<strong>le</strong>ma(1.27)siaformulato<strong>per</strong> istanti<br />
successivi a quello inizia<strong>le</strong> (t ≥ 0) <strong>di</strong>mostreremo che la soluzione è in realtà ben<br />
definita <strong>per</strong> tutti i tempi t ∈ R. Ciò poteva essere preve<strong>di</strong>bi<strong>le</strong> osservando che,<br />
cambiando t in −t, il prob<strong>le</strong>ma (1.27) resta invariato (salvo prendere il dato<br />
−ψ al posto <strong>di</strong> ψ). In altre paro<strong>le</strong>, <strong>le</strong> proprietà matematiche del prob<strong>le</strong>ma non<br />
<strong>di</strong>pendono dalla <strong>di</strong>rezione del tempo.<br />
Teorema 1.15 Se ϕ ∈ C 2 [0,l] e ψ ∈ C 1 [0,l], con ϕ ′′ e ψ ′ regolari a tratti, 3 e<br />
se ϕ(0) = ϕ(l) = ϕ ′′ (0) = ϕ ′′ (l) = ψ(0) = ψ(l) = 0, allora la funzione u(x,t)<br />
definita da (1.34), (1.35), (1.36), è soluzione regolare (cioè <strong>di</strong> classe C 2 ([0,l]×<br />
R)) del prob<strong>le</strong>ma (1.27).<br />
Dimostrazione Consideriamo ϕ e ψ estese in modo <strong>di</strong>spari sull’intervallo<br />
(−l,l). Come si può facilmente verificare, <strong>le</strong> ipotesi del teorema assicurano che<br />
<strong>le</strong> estensioni 2l-<strong>per</strong>io<strong>di</strong>che <strong>di</strong> ϕ, ϕ ′ , ϕ ′′ ψ e ψ ′ a tutto R sono continue e regolari<br />
a tratti. Dunque possiamo applicare il Teorema 1.5, in particolare, al<strong>le</strong> funzioni<br />
ϕ, ϕ ′′ , ψ e ψ ′ <strong>per</strong> cui, in<strong>di</strong>cati con ϕ n , ϕ ′′ n , ψ ne ψ n ′ i CdF <strong>di</strong> tali funzioni si ha<br />
∞∑ ∞∑ ∞∑ ∞∑<br />
|ϕ n | < ∞, |ϕ ′′ n| < ∞, |ψ n | < ∞, |ψ n| ′ < ∞.<br />
n=1<br />
n=1<br />
n=1<br />
Ora, poiché A n = ϕ n e ω n B n = ψ n , si ha chiaramente<br />
n=1<br />
|u n (x,t)| ≤ |A n |+|B n | = |ϕ n |+| ψ n<br />
|,<br />
ω n ∣ ∂ 2 u n ∣∣∣<br />
∣ ∂x 2 (x,t) ≤ |knA 2 n |+|knB 2 n | = |ϕ ′′ n|+ 1 c |ψ′ n|,<br />
∣<br />
∂ 2 u n<br />
∂t 2 (x,t) ∣ ∣∣∣<br />
≤ |ω 2 nA n |+|ω 2 nB n | = |c 2 ϕ ′′ n|+|cψ ′ n|,<br />
<strong>per</strong> ogni x ∈ [0,l] e t ∈ R. Poiché, come abbiamo appena visto, i membri <strong>di</strong><br />
destra <strong>di</strong> queste <strong>di</strong>suguaglianze sono i termini <strong>di</strong> serie convergenti, si ha che la<br />
serie del<strong>le</strong> u n (x,t) e del<strong>le</strong> sue derivate del secondo or<strong>di</strong>ne sono uniformemente<br />
convergenti. Pertanto va<strong>le</strong> il teorema <strong>di</strong> derivazione <strong>per</strong> serie e possiamo concludere<br />
che u ∈ C 2 ([0,l]×R) con u tt = c 2 u xx . Inoltre, chiaramente, valgono <strong>le</strong><br />
con<strong>di</strong>zioni iniziali e quel<strong>le</strong> al contorno.<br />
□<br />
Osservazione 1.16 Se si suppone meno regolarità sui dati iniziali, la serie che<br />
definisce u potrà essereancoraconvergentema non averela regolaritànecessaria<br />
<strong>per</strong> poter derivare in senso classico. Si otterranno <strong>per</strong>ciò soluzioni in un qualche<br />
senso generalizzato (p.es. soluzioni deboli [7]).<br />
3 Ve<strong>di</strong> nota a pag. 5.
CAPITOLO 1. SERIE DI FOURIER 14<br />
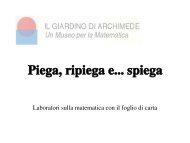
n = 1 n = 2<br />
n = 3 n = 4<br />
Figura 1.1: Profili del<strong>le</strong> prime quattro armoniche della corda vibrante con estremi<br />
fissi. Sono evidenziati i punti nodali.<br />
Per capire meglio il significato fisico della soluzione (1.34), osserviamo che essa<br />
è data dalla sovrapposizione <strong>di</strong> infinite funzioni u n , che sono dette armoniche.<br />
Riscriviamo l’armonica u n nel modo seguente:<br />
u n (x,t) = α n sin(ω n t+γ n )sin(k n x), (1.37)<br />
dove abbiamo introdotto l’ampiezza α n e la fase γ n date da<br />
α n = √ A 2 n +B2 n , cosγ n =<br />
B<br />
√ n<br />
.<br />
A<br />
2 n +Bn<br />
2<br />
Osserviamoquin<strong>di</strong> cheu n si comportacome un’onda stazionaria, ovveroun profilo<br />
costante sin(k n x) modulato armonicamente nel tempo dall’ampiezza oscillante<br />
α n sin(ω n t+γ n ). In particolare, osserviamo che, durante l’oscillazione, i<br />
punti in cui si annulla il fattore sin(k n x) rimangono fermi. Tali punti sono detti<br />
punti nodali e si ottengono risolvendo k n x = qπ con q ∈ Z e x ∈ (0,l). Risulta<br />
<strong>per</strong>ciò che l’n-esima armonica ha esattamente n−1 punti nodali, dati da<br />
x = ql<br />
n ,<br />
q = 1,2,...n−1<br />
(si veda la figura 1.1). Il fattore α n sin(ω n t+γ n ) oscilla con frequenza<br />
ν n = ω n<br />
2π = nc<br />
2l = n √ σ<br />
2l ρ ,<br />
dove si è usata la relazione c =<br />
√<br />
σ<br />
ρ<br />
, in cui σ è la tensione della corda e ρ la<br />
sua densità (lineare). Dunque u n corrisponde a un “suono” <strong>di</strong> frequenza ν n ,
CAPITOLO 1. SERIE DI FOURIER 15<br />
detto suono armonico. Il più basso dei suoni armonici è quello dell’armonica<br />
fondamenta<strong>le</strong> u 1 , che vibra con frequenza<br />
ν 1 = 1 2l<br />
e che sostanzialmente determina l’altezza del suono prodotto dalla corda vibrante.<br />
Semplificando un po’ <strong>le</strong> cose, possiamo <strong>di</strong>re che la sovrapposizione del<strong>le</strong><br />
<strong>di</strong>verse armoniche che vanno a formare u (ce ne sono infinite ma <strong>di</strong> fatto solo <strong>le</strong><br />
prime unità, massimo decine, sono importanti) contribuiscono a determinare il<br />
timbro del suono. 4 Per quanto riguarda l’intensità, questa è <strong>le</strong>gata all’energia<br />
della vibrazione:<br />
E(t) = 1 2<br />
∫ l<br />
0<br />
√ σ<br />
ρ<br />
[<br />
ρu<br />
2<br />
t (x,t)+σu 2 x (x,t)] dx (1.38)<br />
in cui si <strong>di</strong>stinguono una parte <strong>di</strong> energia cinetica e una parte <strong>di</strong> energia potenzia<strong>le</strong><br />
elastica. Ora, poiché<br />
∞∑<br />
u t (x,t) = ω n α n cos(ω n t+γ n )sin(k n x),<br />
u x (x,t) =<br />
n=1<br />
∞∑<br />
k n α n sin(ω n t+γ n )cos(k n x),<br />
n=1<br />
possono essere interpretati come sviluppi in serie <strong>di</strong> Fourier <strong>di</strong> una funzione<br />
<strong>di</strong>spari e una pari su [−l,l], <strong>per</strong> il teorema <strong>di</strong> Parseval rea<strong>le</strong> (1.18) si ha<br />
∫ l<br />
0<br />
∫ l<br />
0<br />
u 2 t (x,t)dx = 1 2<br />
u 2 x(x,t)dx = 1 2<br />
∫ l<br />
−l<br />
∫ l<br />
−l<br />
u 2 t (x,t)dx = ∞ ∑<br />
u 2 x(x,t)dx =<br />
n=1<br />
∞∑<br />
n=1<br />
l<br />
2 (ω nα n ) 2 cos 2 (ω n t+γ n ),<br />
l<br />
2 (k nα n ) 2 sin 2 (ω n t+γ n ).<br />
Pertanto, ricordando che σ = c 2 ρ, si ottiene<br />
E(t) = σ ∫ l<br />
[ ] u<br />
2<br />
t (x,t)<br />
2 c 2 +u 2 x(x,t) dx = σl ∞∑<br />
(k n α n ) 2 = σl<br />
4 4<br />
0<br />
n=1<br />
∞∑<br />
kn(A 2 2 n +Bn).<br />
2<br />
Osserviamo che E(t) = E(0) := E <strong>per</strong> ogni t, e dunque si ha la conservazione<br />
dell’energia. Infine, ricordando che A n = ϕ n e ω n B n = ψ n , dove ϕ n e ψ n sono<br />
i coefficienti <strong>di</strong> Fourier del prolungamento <strong>di</strong>spari <strong>di</strong> ϕ e ψ a (−l,l), si può<br />
scrivere l’energia in funzione <strong>di</strong> tali coefficienti:<br />
E =<br />
∞∑<br />
n=1<br />
n=1<br />
l ( ∑<br />
ρψ<br />
2<br />
4 n +σknϕ 2 2 n) ∞ lρ (<br />
= ψ<br />
2<br />
4 n +ωnϕ 2 2 )<br />
n . (1.39)<br />
n=1<br />
Esercizio 1.17 Utilizzando la conservazione dell’energia enunciare e <strong>di</strong>mostrare<br />
un risultato <strong>di</strong> unicità <strong>per</strong> la soluzione del prob<strong>le</strong>ma della corda vibrante.<br />
4 In realtà il timbro caratteristico <strong>di</strong> uno strumento <strong>di</strong>pende da molti altri fattori, come<br />
ad esempio l’attacco, il rilascio e, più in genera<strong>le</strong>, l’evoluzione tempora<strong>le</strong> della forma d’onda.<br />
Teniamo sempre presente che il sistema (1.27) è una descrizione molto semplificata della realtà<br />
(in particolare non prevede effetti <strong>di</strong>ssipativi, <strong>per</strong> cui il suono si estenderebbe indefinitamente<br />
nel tempo).
CAPITOLO 1. SERIE DI FOURIER 16<br />
1.3 Prob<strong>le</strong>ma del “tamburo rettangolare”<br />
Consideriamo una membrana elastica idea<strong>le</strong> <strong>di</strong> forma rettangolare, con lati <strong>di</strong><br />
lunghezza a e b, vincolata a rimanere fissa sul bordo. Posto<br />
R = {(x,y) ∈ R 2 | 0 < x < a, 0 < y < b},<br />
<strong>le</strong> vibrazioni <strong>di</strong> ta<strong>le</strong> membrana (“tamburo rettangolare”) sono descritte dal<br />
seguente sistema:<br />
⎧<br />
u tt (x,y,t) = c 2 (u xx +u yy )(x,y,t), (x,y) ∈ R, t > 0,<br />
⎪⎨ u(x,y,t) = 0, (x,y) ∈ ∂R, t ≥ 0,<br />
(1.40)<br />
u(x,y,0) = ϕ(x,y), (x,y) ∈ R,<br />
⎪⎩<br />
u t (x,y,0) = ψ(x,y), (x,y) ∈ R,<br />
dove ϕ e ψ sono opportuni dati iniziali. Risolviamo il prob<strong>le</strong>ma <strong>per</strong> separazione<br />
<strong>di</strong> variabili, come nell’esempio precedente. Se cerchiamo una soluzione della<br />
forma<br />
u(x,y,t) = X(x)Y(y)T(t),<br />
dalla prima del<strong>le</strong> (1.40) otteniamo<br />
X(x)Y(y)T ′′ (t) = c 2 [X ′′ (x)Y(y)T(t)+X(x)Y ′′ (y)T(t)]<br />
e, analogamente al caso precedente, <strong>di</strong>videndo <strong>per</strong> c 2 X(x)Y(y)T(t) si ottiene la<br />
con<strong>di</strong>zione<br />
T ′′ (t)<br />
c 2 T(t) = X′′ (x)<br />
X(x) + Y ′′ (x)<br />
Y(y) = µ.<br />
con µ costante. Ancora, dall’uguaglianza X′′ (x)<br />
X(x)<br />
= µ − Y ′′ (x)<br />
Y(y)<br />
deduciamo che<br />
dovrà esistere un’altra costante η <strong>per</strong> cui<br />
X ′′ (x)<br />
X(x) = µ− Y ′′ (x)<br />
Y(y) = η.<br />
Osserviamo inoltre che la con<strong>di</strong>zione al contorno risulterà sod<strong>di</strong>sfatta se<br />
X(0) = X(a) = Y(0) = Y(b) = 0.<br />
Ci troviamo <strong>per</strong>ciò <strong>di</strong> fronte a una coppia <strong>di</strong> prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong>:<br />
{<br />
X ′′ (x) = ηX(x), x ∈ (0,a),<br />
X(0) = X(a) = 0,<br />
{<br />
Y ′′ (y) = γY(y), y ∈ (0,b),<br />
Y(0) = Y(b) = 0,<br />
(1.41)<br />
dove γ = µ −η. Come abbiamo già visto nel risolvere il prob<strong>le</strong>ma della corda<br />
vibrante, entrambi questi prob<strong>le</strong>mi hanno una famiglia numerabi<strong>le</strong> <strong>di</strong> soluzioni<br />
(coppie autofunzione-autovalore) date da<br />
X m (x) = sin(k a mx), η m = −(k a m) 2 , k a m = mπ<br />
a , m = 1,2,...<br />
Y n (x) = sin(k b ny), γ n = −(k b n) 2 , k b n = nπ<br />
b , n = 1,2,... (1.42)
CAPITOLO 1. SERIE DI FOURIER 17<br />
Per ogni scelta <strong>di</strong> m e n si ha <strong>per</strong>ciò<br />
[ (mπ ) 2 ( nπ<br />
µ = µ mn = η m +γ n = − +<br />
a b<br />
e la corrispondente equazione <strong>per</strong> T(t) è<br />
T ′′ (t) = −ωmnT(t),<br />
2<br />
) 2<br />
]<br />
(1.43)<br />
dove √ (mπ ) 2 ( nπ<br />
) 2<br />
√<br />
ω mn = c + = c (k<br />
a b<br />
m) a 2 +(kn) b 2 .<br />
Ta<strong>le</strong> equazione ha soluzione genera<strong>le</strong><br />
T mn (t) = Acos(ω mn t)+Bsin(ω mn t),<br />
con A e B costantiarbitrarie. Si è <strong>per</strong>ciòtrovatala soluzione a variabiliseparate<br />
u mn (x,y,t) = X m (x)Y n (y)T mn (t)<br />
= [A mn cos(ω mn t)+B mn sin(ω mn t)]sin(kmx)sin(k a ny)<br />
b (1.44)<br />
= α mn sin(ω mn t+γ mn )sin(km a x)sin(kb n y),<br />
con A mn , B mn costanti arbitrarie e<br />
α mn = √ A 2 mn +B2 mn , cosγ mn =<br />
B mn<br />
√ .<br />
A<br />
2 mn +Bmn<br />
2<br />
Sempre procedendo come nel caso della corda vibrante, cerchiamo la soluzione<br />
genera<strong>le</strong> del prob<strong>le</strong>ma (1.40) come somma <strong>di</strong> infinite “armoniche” u mn :<br />
u(x,y,t) =<br />
∞∑<br />
m,n=1<br />
Imponendo il dato inizia<strong>le</strong> otteniamo <strong>le</strong> con<strong>di</strong>zioni<br />
∞∑<br />
m,n=1<br />
∞∑<br />
m,n=1<br />
A mn sin(km a x)sin(kb ny) = ϕ(x,y),<br />
u mn (x,y,t). (1.45)<br />
ω mn B mn sin(k a m x)sin(kb n y) = ψ(x,y). (1.46)<br />
Per andare avanti occorre fare una piccola <strong>di</strong>gressione sullo sviluppo in serie <strong>di</strong><br />
Fourier <strong>di</strong> una funzione <strong>di</strong> due variabili definita nel rettangolo [−a,a]×[−b,b]:<br />
f(x,y), −a ≤ x ≤ a, −b ≤ y ≤ b.<br />
Per ogni y fissata, la funzione f(x,y) (vista come funzione della sola x) può<br />
essere sviluppata (almeno formalmente) in serie <strong>di</strong> Fourier:<br />
f(x,y) = ∑ m∈Z<br />
f m (y)e imπ a x , f m (y) = 1<br />
2a<br />
∫ a<br />
−a<br />
mπ −i<br />
f(x,y)e a x dx.
CAPITOLO 1. SERIE DI FOURIER 18<br />
I coefficienti <strong>di</strong> Fourier f m (y), che sono ovviamente funzioni <strong>di</strong> y ∈ [−b,b],<br />
possono essere a loro volta sviluppati in serie <strong>di</strong> Fourier:<br />
f m (y) = ∑ n∈Z<br />
f mn e i nπ<br />
b y ,<br />
f mn = 1 2b<br />
∫ b<br />
−b<br />
nπ −i<br />
f m (y)e a y dy.<br />
In definitiva si ha <strong>per</strong>ciò lo sviluppo <strong>di</strong> f in “serie <strong>di</strong> Fourier doppia”<br />
f(x,y) = ∑<br />
f mn e i(ka m x+kby) n<br />
,<br />
f mn = 1<br />
4ab<br />
m,n∈Z<br />
∫ a ∫ b<br />
−a<br />
−b<br />
f(x,y)e −i(ka m x+kb n y) dxdy.<br />
(1.47)<br />
dove, come precedentemente definito, km a = mπ<br />
a , kb n = nπ b<br />
. Senza preoccuparci<br />
<strong>di</strong> scrivere un’espressione genera<strong>le</strong> <strong>per</strong> il caso rea<strong>le</strong>, limitiamoci ad osservare che<br />
se f è rea<strong>le</strong> e <strong>di</strong>spari (cioè f(−x,y) = f(x,−y) = −f(x,y)) allora lo sviluppo<br />
(1.47) si può scrivere<br />
f(x,y) =<br />
a mn = 1 ab<br />
= 4 ab<br />
∞∑<br />
m,n=1<br />
∫ a ∫ b<br />
−a −b<br />
∫ a ∫ b<br />
0<br />
a mn sin(k a m x)sin(kb n y)<br />
0<br />
f(x,y)sin(k a m x)sin(kb n y)dxdy<br />
f(x,y)sin(k a mx)sin(k b ny)dxdy.<br />
(1.48)<br />
Tornando al nostro prob<strong>le</strong>ma, se confrontiamo (1.46) con (1.48), possiamo riconoscere<br />
in (1.46) lo sviluppo in serie <strong>di</strong> Fourier doppia dei prolungamenti <strong>di</strong>spari<br />
<strong>di</strong> ϕ e ψ al rettangolo [−a,a]×[−b,b]. Quin<strong>di</strong> <strong>le</strong> con<strong>di</strong>zioni iniziali sono (formalmente)<br />
sod<strong>di</strong>sfatte se <strong>le</strong> costanti arbitrarie A mn e ω mn B mn sono i coefficienti<br />
dello sviluppo in serie <strong>di</strong> Fourier doppia del<strong>le</strong> funzioni <strong>di</strong>spari ϕ e ψ, ovvero<br />
A mn = 4 ab<br />
∫ a ∫ b<br />
0<br />
B mn = 1<br />
ω mn<br />
4<br />
ab<br />
ϕ(x,y)sin(k a mx)sin(k b ny)dxdy. (1.49)<br />
0<br />
∫ a ∫ b<br />
0<br />
0<br />
ψ(x,y)sin(km a x)sin(kb ny)dxdy. (1.50)<br />
Con ta<strong>le</strong> scelta dei coefficienti A mn e B mn , la (1.45) è la soluzione forma<strong>le</strong><br />
del prob<strong>le</strong>ma (1.40). Naturalmente si possono <strong>di</strong>mostrare <strong>per</strong> questa soluzione<br />
risultati rigorosi analoghi al Teorema 1.15.<br />
Per quanto riguarda l’interpretazione fisica, valgono considerazioni analoghe a<br />
quel<strong>le</strong> svolte <strong>per</strong> la corda vibrante. Notiamo, in particolare, che <strong>le</strong> armoniche<br />
u mn consistono in una modulazione, <strong>di</strong> frequenza tempora<strong>le</strong> ω mn /2π, del<br />
profilo sin(km a x)sin(kb ny). In questo caso i punti che rimangono fissi durante<br />
l’oscillazione (corrispondenti all’annullarsi del fattore sin(kmx) a o del fattore<br />
sin(kny)) b formanodel<strong>le</strong> linee nodali paral<strong>le</strong><strong>le</strong> agli assicartesiani. Perl’esattezza,<br />
l’armonica u mn ha m−1 linee nodali paral<strong>le</strong><strong>le</strong> all’asse y, <strong>di</strong> equazioni<br />
x = qa m ,<br />
q = 1,2,...m−1,
CAPITOLO 1. SERIE DI FOURIER 19<br />
Figura 1.2: Rappresentazione dei profili spaziali <strong>di</strong> alcune armoniche del tamburo<br />
rettangolare (in questo esempio b = a/2). Le tonalità <strong>di</strong> grigio corrispondono a <strong>di</strong>verse<br />
altezze della membrana e sono evidenziate <strong>le</strong> linee nodali.<br />
e n−1 linee nodali paral<strong>le</strong><strong>le</strong> all’asse x, <strong>di</strong> equazioni<br />
(si veda la figura 1.2).<br />
y = qb<br />
n ,<br />
q = 1,2,...n−1,<br />
Osservazione 1.18 Nell’esempio precedente abbiamo incontrato la serie <strong>di</strong><br />
Fourier doppia (1.47). Naturalmente si può scrivere, più in genera<strong>le</strong>, lo sviluppo<br />
in serie <strong>di</strong> Fourier <strong>di</strong> una funzione f, <strong>di</strong> N variabili, definita nel rettangolo<br />
R = [−l 1 ,l 1 ]×[−l 2 ,l 2 ]×···[−l N ,l N ]<br />
(ed eventualmente estesa <strong>per</strong>io<strong>di</strong>camente al <strong>di</strong> fuori <strong>di</strong> esso). Generalizzando la<br />
(1.47), la forma <strong>di</strong> ta<strong>le</strong> sviluppo (serie <strong>di</strong> Fourier multipla) è la seguente:<br />
f(x) = ∑<br />
∫<br />
f n e ikn·x 1<br />
, f n = f(x)e −ikn·x dx (1.51)<br />
mis(R)<br />
n∈Z N R<br />
dove<br />
x = (x 1 ,x 2 ,...,x N ), n = (n 1 ,n 2 ,...,n N ) k n =<br />
(<br />
n1 π<br />
l 1<br />
, n 2π<br />
l 2<br />
,..., n Nπ<br />
l N<br />
)<br />
.
CAPITOLO 1. SERIE DI FOURIER 20<br />
Per la serie <strong>di</strong> Fourier multipla valgono risultati analoghi a quelli <strong>di</strong>mostrati nel<br />
caso uni<strong>di</strong>mensiona<strong>le</strong>. 5<br />
5 Ancora più in genera<strong>le</strong>, si può estendere la serie <strong>di</strong> Fourier anche a funzioni definite su in<br />
insieme <strong>di</strong> tipo LR, dove R è il rettangolo sopra definito e L è una qualunque trasformazione<br />
lineare con determinante non nullo.
Capitolo 2<br />
Prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong><br />
e funzioni speciali<br />
2.1 Prob<strong>le</strong>ma del tamburo circolare<br />
Consideriamo il prob<strong>le</strong>ma <strong>di</strong> stu<strong>di</strong>are <strong>le</strong> oscillazioni <strong>di</strong> una membrana elastica <strong>di</strong><br />
forma circolare vincolata a rimanere fissa sul bordo, stu<strong>di</strong>amo cioè il prob<strong>le</strong>ma<br />
del “tamburo circolare” <strong>di</strong> raggio r. Posto<br />
D = {(x,y) ∈ R 2 | x 2 +y 2 < r 2 },<br />
il prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong> da risolvere, analogo al prob<strong>le</strong>ma (1.40) ma in una<br />
<strong>di</strong>versa geometria, è<br />
⎧<br />
u tt (x,y,t) = c 2 (u xx +u yy )(x,y,t), (x,y) ∈ D, t > 0,<br />
⎪⎨ u(x,y,t) = 0, (x,y) ∈ ∂D, t ≥ 0,<br />
(2.1)<br />
u(x,y,0) = ϕ(x,y), (x,y) ∈ D,<br />
⎪⎩<br />
u t (x,y,0) = ψ(x,y), (x,y) ∈ D,<br />
dove ϕ e ψ sono i dati iniziali. La tecnica <strong>di</strong> separazione del<strong>le</strong> variabili, rispetto<br />
al<strong>le</strong> variabili x e y, risulta prob<strong>le</strong>matica <strong>per</strong>ché la con<strong>di</strong>zione al bordo è, <strong>per</strong><br />
così <strong>di</strong>re, “non fattorizzabi<strong>le</strong>”. Possiamo <strong>per</strong>ò provare a usare la separazione <strong>di</strong><br />
variabili rispetto al<strong>le</strong> coor<strong>di</strong>nate polari<br />
{<br />
x = ρcosθ,<br />
ρ > 0, 0 ≤ θ < 2π,<br />
y = ρsinθ,<br />
in cui la con<strong>di</strong>zione al bordo si esprimerè tramite la sola ρ. Posto ˜f(ρ,θ) =<br />
f(ρcosθ,ρsinθ) e ricordando l’epressione dell’o<strong>per</strong>atore Laplaciano in coor<strong>di</strong>-<br />
21
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 22<br />
nate polari, il prob<strong>le</strong>ma si trasforma in<br />
⎧<br />
ũ tt (ρ,θ,t) = c 2( ũ ρρ + 1 ρ ũρ + 1 )<br />
ρ 2 ũθθ (ρ,θ,t), 0 < ρ < r, 0 < θ < 2π, t > 0,<br />
⎪⎨ ũ(r,θ,t) = 0, 0 ≤ θ < 2π, t ≥ 0,<br />
ũ(ρ,θ,0) = ˜ϕ(ρ,θ), 0 < ρ ≤ r, 0 ≤ θ < 2π,<br />
⎪⎩<br />
ũ t (ρ,θ,0) = ˜ψ(ρ,θ), 0 < ρ ≤ r, 0 ≤ θ < 2π,<br />
(2.2)<br />
Come negli esempi visti nel capitolo precedente, cerchiamo una soluzione a<br />
variabili separate:<br />
ũ(ρ,θ,t) = R(ρ)H(θ)T(t),<br />
da cui (omettendo l’in<strong>di</strong>cazione del<strong>le</strong> variabili in<strong>di</strong>pendenti) la con<strong>di</strong>zione<br />
RHT ′′ = c<br />
(R 2 ′′ HT + 1 ρ R′ HT + 1 )<br />
ρ 2 RH′′ T .<br />
Dividendo <strong>per</strong> c 2 RHT e separando il termine che <strong>di</strong>pende solo da t si ottiene<br />
T ′′<br />
c 2 T = R′′<br />
R + R′<br />
ρR + H′′<br />
ρ 2 H<br />
= −µ. (2.3)<br />
con µ costante (il segno meno è <strong>per</strong> la successiva convenienza <strong>di</strong> scrittura).<br />
Moltiplicando <strong>per</strong> ρ 2 e separando il termine che <strong>di</strong>pende solo da θ si ottiene<br />
altresì<br />
ρ 2 R ′′<br />
R + ρR′<br />
R +ρ2 µ = − H′′<br />
H = ν,<br />
dove ν è un’altra costante. Tenuto conto che la con<strong>di</strong>zione al bordo del <strong>di</strong>sco è<br />
sod<strong>di</strong>sfatta se R(r) = 0 e che la variabi<strong>le</strong> θ è da considerarsi <strong>per</strong>io<strong>di</strong>ca, siamo<br />
condotti alla coppia <strong>di</strong> prob<strong>le</strong>mi <strong>di</strong> tipo Sturm-Liouvil<strong>le</strong><br />
{ {<br />
H ′′ = −νH, ρ 2 R ′′ +ρR ′ +(ρ 2 µ−ν)R = 0,<br />
(2.4)<br />
H(θ) = H(θ +2π), R(r) = 0.<br />
Occupiamoci <strong>per</strong> prima del prob<strong>le</strong>ma <strong>per</strong> H. La soluzione generica dell’equazione<br />
H ′′ = −νH è<br />
H(θ) = ae λθ +be −λθ ,<br />
λ = √ −ν,<br />
con a e b costanti arbitrarie. Posto λ = α + iβ, con α,β ∈ R si vede che la<br />
soluzione può essere <strong>per</strong>io<strong>di</strong>ca solo se α = 0. Con α = 0 si ha una soluzione <strong>di</strong><br />
<strong>per</strong>iodo 2π/|β|. Pertanto, se vogliamo che la soluzione sia 2π-<strong>per</strong>io<strong>di</strong>ca, bisogna<br />
che β sia un numero intero e dunque λ = λ m = im, con m ∈ Z. Si ha quin<strong>di</strong> la<br />
famiglia <strong>di</strong> coppie autofunzione-autovalore<br />
H m (θ) = e imθ , ν m = −λ 2 m = m2 , m ∈ Z (2.5)<br />
(che corrispondeallabase <strong>di</strong> Fourieranalizzatanel precedentecapitolo). Fissato<br />
dunque ν = ν m = m 2 , stu<strong>di</strong>amo il prob<strong>le</strong>ma <strong>per</strong> R<br />
{<br />
ρ 2 R ′′ +ρR ′ +(ρ 2 µ−m 2 )R = 0,<br />
R(r) = 0.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 23<br />
Conviene cambiare variabi<strong>le</strong>, ponendo<br />
ξ = √ µρ, g(ξ) = R(ξ/ √ µ),<br />
e definire N := |m|. Si ottiene così la seguente equazione <strong>di</strong>fferenzia<strong>le</strong> <strong>per</strong> g<br />
ξ 2 g ′′ (ξ)+ξg ′ (ξ)+ ( ξ 2 −N 2) g(ξ) = 0, (2.6)<br />
dettaequazione <strong>di</strong> Bessel <strong>di</strong> or<strong>di</strong>ne N. Proviamoarisolverel’equazione<strong>di</strong>Bessel<br />
<strong>per</strong> serie: ponendo g(ξ) = ∑ ∞<br />
k=0 c kξ k si ha<br />
∞∑<br />
∞∑ ∞∑ ∑<br />
∞<br />
k(k −1)c k ξ k + kc k ξ k + c k−2 ξ k −N 2 c k ξ k = 0<br />
k=2<br />
k=1<br />
<strong>per</strong> cui, uguagliando i coefficienti del<strong>le</strong> uguali potenze <strong>di</strong> ξ, si ottengono <strong>le</strong><br />
relazioni ricorsive<br />
⎧<br />
⎪⎨<br />
N 2 c 0 = 0,<br />
(1−N 2 )c 1 = 0,<br />
⎪⎩<br />
(k 2 −N 2 )c k +c k−2 = 0, k ≥ 2.<br />
Notiamo che i c k sono tutti nulli fino a k = N − 1 (infatti solo <strong>per</strong> k = N<br />
l’equazione ricorsiva è compatibi<strong>le</strong> con c k ≠ 0) e dunque<br />
Conviene quin<strong>di</strong> definire<br />
k=2<br />
c 0 = c 1 = ··· = c N−1 = 0.<br />
a j := c N+j , j = 0,1,2,...<br />
<strong>per</strong> cui a 0 non è necessariamente nullo e la serie <strong>di</strong> potenze <strong>di</strong> g <strong>di</strong>venta<br />
∑<br />
∞<br />
g(ξ) = ξ N a j ξ j .<br />
Inoltre, (k 2 −N 2 )c k +c k−2 scritta <strong>per</strong> k = N +j, con j ≥ 0, <strong>di</strong>venta<br />
e dunque<br />
j=0<br />
[(N +j) 2 −N 2 ]c N+j +c N+j−2 = 0,<br />
• <strong>per</strong> j = 0 si ottiene 0a 0 = 0, <strong>per</strong>ciò a 0 è arbitrario;<br />
• <strong>per</strong> j = 1 si ottiene (1+2N)a 1 = 0, <strong>per</strong>ciò a 1 = 0;<br />
• <strong>per</strong> j ≥ 2 si ottiene la formula ricorsiva<br />
a j = − a j−2<br />
j(j +2N) .<br />
k=0
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 24<br />
Osserviamo che gli a j con j <strong>di</strong>spari sono tutti nulli: a 1 = a 3 = a 5 = ··· = 0.<br />
Posto j = 2k, si ha<br />
a 2k = − a 2(k−1)<br />
4k(k +N) ,<br />
da cui<br />
e, scegliendo<br />
otteniamo<br />
Si ha così<br />
g(ξ) =<br />
a 2k = (−1) k a 0 N!<br />
4 k k!(k +N)! .<br />
a 2k =<br />
∞∑<br />
k=0<br />
a 0 = 1<br />
2 N N! ,<br />
(−1) k<br />
2 2k+N k!(k +N)! .<br />
(−1) k ( ) 2k+N ξ<br />
=: J N (ξ). (2.7)<br />
k!(k +N)! 2<br />
Notiamo che la serie <strong>di</strong> potenze converge su tutto R a una funzione analitica<br />
J N detta funzione <strong>di</strong> Bessel <strong>di</strong> prima specie <strong>di</strong> or<strong>di</strong>ne N.<br />
Torniamo quin<strong>di</strong> alla funzione ra<strong>di</strong>a<strong>le</strong> R. Abbiamo trovato che<br />
R(ρ) = g( √ µρ) = J |m| ( √ µρ)<br />
ma dobbiamo ancora imporre la con<strong>di</strong>zione R(r) = 0. Risulta che J N , ha una<br />
successione infinita <strong>di</strong> zeri che numeriamo a partire dal primo zero strettamente<br />
positivo 1 0 < ξ N 0 < ξN 1 < ξN 2 < ...<br />
(ve<strong>di</strong> figura 2.1). Dunque la con<strong>di</strong>zione R(r) = 0 è sod<strong>di</strong>sfatta se e solo se<br />
√ µr = ξ<br />
|m|<br />
n , ovvero<br />
µ = kmn 2 , k mn := ξ|m| n<br />
r ,<br />
<strong>per</strong> un certo n = 0,1,2,.... Abbiamo dunque trovato la famiglia <strong>di</strong> coppie<br />
autovalore-autofunzione<br />
µ mn = k 2 mn , R mn(ρ) = J |m| (k mn ρ), m ∈ Z, n = 0,1,2,... (2.8)<br />
Fissati m ed n, dalla (2.3) si ottiene l’equazione <strong>per</strong> T(t)<br />
T ′′ = −c 2 k 2 mn T<br />
che ha soluzione generica T mn (t) = Acos(ω mn t) + Bsin(ω mn t), con A e B<br />
costanti comp<strong>le</strong>sse, dove si è posto<br />
ω mn = ck mn = cξ|m| n<br />
r<br />
1 Per N ≥ 1 c’è sempre uno zero anche nell’origine, che non contiamo.<br />
.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 25<br />
1<br />
N = 0<br />
N = 1<br />
N = 2<br />
0.5<br />
0<br />
−0.5<br />
0 2 4 6 8 10 12 14 16<br />
Figura 2.1: Plot del<strong>le</strong> prime tre funzioni <strong>di</strong> Bessel, J 0, J 1 e J 2.<br />
Così, analogamente al caso della corda vibrante e del tamburo rettangolare, abbiamo<br />
trovato <strong>le</strong> soluzioni a variabiliseparate, ovvero<strong>le</strong> armoniche, del tamburo<br />
circolare,<br />
dove si è posto<br />
ũ mn (ρ,θ,t) = [A mn cos(ω mn t)+B mn sin(ω mn t)]W mn (ρ,θ).<br />
W mn (ρ,θ) := J |m| (k mn ρ)e imθ , (2.9)<br />
che chiameremo funzioni cilindriche. Cerchiamo la soluzione del prob<strong>le</strong>ma (2.1)<br />
come somma <strong>di</strong> infinite armoniche,<br />
ũ(ρ,θ,t) = ∑ ∞∑<br />
[A mn cos(ω mn t)+B mn sin(ω mn t)]W mn (ρ,θ), (2.10)<br />
m∈Z n=0<br />
<strong>per</strong> cui <strong>le</strong> con<strong>di</strong>zioni iniziali <strong>di</strong>ventano<br />
∑ ∞∑<br />
A mn W mn (ρ,θ) = ˜ϕ(ρ,θ),<br />
m∈Z n=0<br />
∑<br />
m∈Z n=0<br />
∞∑<br />
ω mn B mn W mn (ρ,θ) = ˜ψ(ρ,θ).<br />
(2.11)<br />
Si presenta quin<strong>di</strong> l’esigenza <strong>di</strong> sviluppare funzioni definite su (ρ,θ) ∈ (0,r) ×<br />
(0,2π)inunaserie<strong>di</strong>funzionicilindriche. Sipuò<strong>di</strong>mostrarecheva<strong>le</strong>laproprietà<br />
<strong>di</strong> ortogonalità<br />
∫ 2π ∫ r<br />
0<br />
0<br />
W mn (ρ,θ)W m ′ n ′(ρ,θ)ρdρdθ = C(N,n)δ mm ′δ nn ′, (2.12)<br />
dove la costante <strong>di</strong> normalizzazione C(|m|,n) risulta essere<br />
C(N,n) = πr 2[ J ′ N(<br />
ξ<br />
N<br />
n<br />
)] 2. (2.13)
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 26<br />
Pertanto lo sviluppo (forma<strong>le</strong>) in serie <strong>di</strong> funzioni cilindriche è così fatto:<br />
f(ρ,θ) = ∑ m∈Z<br />
f mn =<br />
1<br />
C(|m|,n)<br />
∞∑<br />
f mn W mn (ρ,θ),<br />
n=0<br />
∫ 2π ∫ r<br />
0<br />
0<br />
f(ρ,θ)W mn (ρ,θ)ρdρdθ.<br />
(2.14)<br />
Per questo tipo <strong>di</strong> sviluppo valgono risultati analoghi a quelli visti <strong>per</strong> <strong>le</strong> serie<br />
<strong>di</strong> Fourier (si veda [5] e più avanti in questo capitolo).<br />
Osservazione 2.1 Losviluppo(2.14)èunosviluppocomp<strong>le</strong>sso. Analogamente<br />
a quanto fatto <strong>per</strong> <strong>le</strong> serie <strong>di</strong> Fourier, se f è una funzione a valori reali, si può<br />
scrivere lo sviluppo <strong>di</strong> f in serie <strong>di</strong> funzioni cilindriche reali. Si lascia al <strong>le</strong>ttore<br />
<strong>per</strong> esercizio la verifica che ta<strong>le</strong> sviluppo ha la seguente forma:<br />
f(ρ,θ) =<br />
∞∑<br />
m=0n=0<br />
∞∑<br />
a mn [f] cos(mθ)J m (k mn ρ)+b mn [f] sin(mθ)J m (k mn ρ)<br />
a mn [f] =<br />
{<br />
f0n , se m = 0,<br />
2Ref mn , se m ≥ 1,<br />
b mn [f] = −2Imf mn .<br />
(2.15)<br />
Figura 2.2: Alcune funzioni cilin<strong>di</strong>riche reali <strong>di</strong> tipo cos(mθ)J m(k mnρ). Le corrispondenti<br />
funzioni <strong>di</strong> tipo sin(mθ)J m(k mnρ) si ottengono semplicemente con una rotazione<br />
π<br />
<strong>di</strong> attorno al’asse del <strong>di</strong>sco. L’interpretazione dei grafici è la stessa della figura 1.2.<br />
2m<br />
Notare <strong>le</strong> linee nodali ra<strong>di</strong>ali e quel<strong>le</strong> angolari.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 27<br />
Dunque, <strong>le</strong> con<strong>di</strong>zioni iniziali (2.11) fissano <strong>le</strong> costanti A mn B mn che, con <strong>le</strong><br />
notazioni appena introdotte, sono date da<br />
A mn = ˜ϕ mn , B mn = 1<br />
ω mn<br />
˜ψmn .<br />
Pertanto, sostituendo i due sviluppi comp<strong>le</strong>ssi nella (2.10) con i corrispondenti<br />
sviluppi reali, si ottiene la formula fina<strong>le</strong> <strong>per</strong> la soluzione:<br />
ũ(ρ,θ,t) =<br />
+<br />
∞∑<br />
m,n=0<br />
∞∑<br />
m,n=0<br />
cos(ω mn t)[a mn [˜ϕ] cos(mθ)+b mn [˜ϕ] sin(mθ)]J m (k mn ρ)<br />
sin(ω mn t)<br />
[<br />
]<br />
a mn [˜ψ] cos(mθ)+b mn [˜ψ] sin(mθ) J m (k mn ρ)<br />
ω mn<br />
(2.16)<br />
Notiamo che la soluzione si scompone in una sovrapposizione<strong>di</strong> onde stazionare<br />
il cui profilo spazia<strong>le</strong> è dato dal<strong>le</strong> funzioni cilindriche reali<br />
cos(mθ)J m (k mn ρ), sin(mθ)J m (k mn ρ), m,n = 0,1,2,...<br />
Osserviamo che (<strong>per</strong> entrambi i tipi <strong>di</strong> funzione) si hanno esattamente m no<strong>di</strong><br />
angolari, che <strong>per</strong> m ≠ 0 sono dati da<br />
θ = qπ m (<strong>per</strong> il seno), θ = qπ m + π<br />
2m<br />
e n no<strong>di</strong> ra<strong>di</strong>ali<br />
(ve<strong>di</strong> figura 2.2).<br />
ρ = ξn q<br />
k mn<br />
,<br />
(<strong>per</strong> il coseno), q = 1,2,...,m,<br />
q = 0,1,...,n−1<br />
2.2 Una classe <strong>di</strong> prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong><br />
Come abbiamo visto dagli esempi fin qui considerati, il metodo <strong>di</strong> separazione<br />
del<strong>le</strong> variabili <strong>per</strong> la soluzione <strong>di</strong> equazioni al<strong>le</strong> derivate parziali conduce spesso<br />
a un prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong>, al<strong>le</strong> derivate or<strong>di</strong>narie, del seguente tipo (detto<br />
prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong>): determinare u : (a,b) → C e µ ∈ C che sod<strong>di</strong>sfino<br />
⎧ [ (<br />
1 d ⎪⎨ p(x) d ) ]<br />
ρ(x) dx dx u(x) −q(x)u(x) +µu(x) = 0, a < x < b,<br />
(2.17)<br />
⎪⎩<br />
+ opportune con<strong>di</strong>zioni lineari in x = a e x = b,<br />
dove ρ, p e q sono funzioni assegnate. Se esistono una costante µ ∈ C e una<br />
funzione u non identicamente nulla <strong>per</strong> cui va<strong>le</strong> la (2.17), si <strong>di</strong>ce allora che u è<br />
un’autofunzione, relativa all’autovalore µ, dell’o<strong>per</strong>atore <strong>di</strong> Sturm-Liouvil<strong>le</strong><br />
A = 1<br />
ρ(x)<br />
[<br />
− d<br />
dx<br />
(<br />
p(x) d<br />
dx<br />
)<br />
+q(x)<br />
]<br />
(+ con<strong>di</strong>zioni in a e b).
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 28<br />
Il motivo <strong>di</strong> ta<strong>le</strong> terminologia deriva dal fatto che l’eq. (2.17) si può riscrivere,<br />
almeno formalmente,<br />
Au = µu,<br />
e dunque è interpretabi<strong>le</strong>come prob<strong>le</strong>maagli autovalori(in un opportuno spazio<br />
vettoria<strong>le</strong> a <strong>di</strong>mensione infinita) <strong>per</strong> l’o<strong>per</strong>atore lineare A.<br />
Ci sono <strong>di</strong>verse categorie<strong>di</strong> prob<strong>le</strong>mi <strong>di</strong> questo tipo, a seconda del<strong>le</strong> varie ipotesi<br />
sul<strong>le</strong> funzioni ρ, p q e sul<strong>le</strong> con<strong>di</strong>zioni al contorno. Un risultato piutosto genera<strong>le</strong><br />
(che ci limitiamo ad enunciare, senza <strong>di</strong>mostrazione) è il seguente.<br />
Teorema 2.2 Supponiamo p, p ′ , q, ρ reali e continue in [a,b], con p > 0 e<br />
ρ > 0 in (a,b), e consideriamo il prob<strong>le</strong>ma (2.17) con <strong>le</strong> seguenti con<strong>di</strong>zioni<br />
negli estremi:<br />
⎧<br />
⎨α 1 u(a)+α 2 u ′ (a) = 0, se p(a) ≠ 0, β 1 u(b)+β 2 u ′ (b) = 0, se p(b) ≠ 0,<br />
⎩<br />
lim<br />
x→a +u(x)<br />
< ∞, se<br />
p(a) = 0, ⎧<br />
⎨<br />
⎩<br />
lim<br />
x→b−u(x) < ∞, se p(b) = 0,<br />
(2.18)<br />
dove α 1 ,α 2 ,β 1 ,β 2 sono costanti reali tali che (α 1 ,α 2 ) ≠ (0,0) e (β 1 ,β 2 ) ≠ (0,0).<br />
Allora si ha:<br />
(i) il prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong> (2.17) con <strong>le</strong> con<strong>di</strong>zioni al contorno (2.18)<br />
ha un’infinità numerabi<strong>le</strong> <strong>di</strong> soluzioni regolari {(u n ,µ n ) | n = 0,1,2,...};<br />
(ii) gli autovalori µ n sono reali, <strong>di</strong>stinti e formano una successione crescente<br />
µ 0 < µ 1 < µ 2 < ··· tendente a +∞;<br />
(iii) <strong>le</strong> autofunzioni u n formano una base ortogona<strong>le</strong> (che si può sempre supporre<br />
ortonorma<strong>le</strong>) dello spazio <strong>di</strong> Hilbert (comp<strong>le</strong>sso) L 2 ((a,b),ρ(x)dx),<br />
<strong>per</strong>tanto, se f appartiene a ta<strong>le</strong> spazio, la serie<br />
∞∑<br />
f n u n (x), f n =<br />
n=0<br />
converge a f in L 2 ((a,b),ρ(x)dx);<br />
∫ b<br />
a<br />
f(x)u n (x)ρ(x)dx (2.19)<br />
(iv) l’autofunzione u n (n = 0,1,2,...) è rea<strong>le</strong> e ha esattamente n zeri isolati<br />
nell’intervallo (a,b);<br />
(v) se f è continua e regolare a tratti, e inoltre sod<strong>di</strong>sfa <strong>le</strong> con<strong>di</strong>zioni al contorno<br />
(2.18), allora la serie (2.19) converge assolutamente e uniformemente<br />
a f.<br />
La <strong>di</strong>mostrazione <strong>di</strong> questo teorema si può trovare in [5] e [13]. Cerchiamo<br />
comunque <strong>di</strong> capire in maniera intuitiva il significato <strong>di</strong> questi risultati e della<br />
particolare forma dell’o<strong>per</strong>atore <strong>di</strong> Sturm-Liouvil<strong>le</strong> A. Riguar<strong>di</strong>amo A come<br />
o<strong>per</strong>atore lineare su un opportuno sottospazio D(A) dello spazio <strong>di</strong> Hilbert X =<br />
L 2 ((a,b),ρ(x)dx):<br />
D(A) = {u ∈ X |u ′′ ∈ X e u sod<strong>di</strong>sfa <strong>le</strong> c.c. (2.18)}.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 29<br />
Ricordando che il prodotto hermitiano in X è dato da<br />
〈u,v〉 =<br />
∫ b<br />
a<br />
u(x)v(x)ρ(x)dx,<br />
possiamo scrivere, sfruttando ripetutamente l’integrazione <strong>per</strong> parti,<br />
〈Au,v〉 =<br />
∫ b<br />
a<br />
∫<br />
[−(pu ′ ) ′ v +quv]dx = −pu ′ v∣ b b<br />
+ [pu ′ v ′ +quv]dx<br />
a<br />
= −pu ′ v∣ b ∣ ∫<br />
∣∣<br />
b b<br />
a +puv′ + [−u(pv ′ ) ′ +quv] dx.<br />
a<br />
Ma, <strong>per</strong> ipotesi, u e v stanno entrambe in D(A) e dunque entrambe sod<strong>di</strong>sfano<br />
<strong>le</strong> con<strong>di</strong>zioni agli estremi (2.18) (con <strong>le</strong> stesse costanti α i e β i ), <strong>le</strong> quali fanno sì<br />
che il termine <strong>di</strong> bordo p(uv ′ −u ′ v) ∣ ∣ b a si annulla sia in a che in b.2 Si ha <strong>per</strong>ciò<br />
〈Au,v〉 =<br />
∫ b<br />
a<br />
[−u(pv ′ ) ′ +quv] dx =<br />
a<br />
∫ b<br />
a<br />
a<br />
[ ]<br />
−u(pv) ′ +uqv dx = 〈u,Av〉<br />
La relazione 〈Au,v〉 = 〈u,Av〉 appena trovata ci <strong>di</strong>ce che A è un o<strong>per</strong>atore<br />
hermitiano, in analogia con <strong>le</strong> matrici hermitiane del caso a <strong>di</strong>mensione finita.<br />
Dunque, i precedenti enunciati (i), (ii) e (iii) ci <strong>di</strong>cono che va<strong>le</strong> un risultato analogoal<br />
teoremaspettra<strong>le</strong> a <strong>di</strong>mensione finita: l’o<strong>per</strong>atorehermitiano Aammette<br />
una base ortonorma<strong>le</strong> formata da autovettori con autovalori reali.<br />
Osservazione 2.3 Lecon<strong>di</strong>zionialcontorno“miste”in (2.18)hannocomecaso<br />
particolare <strong>le</strong> con<strong>di</strong>zioni <strong>di</strong> Dirich<strong>le</strong>t omogenee (caso α 2 = β 2 = 0) e quel<strong>le</strong> <strong>di</strong><br />
Neumann omogenee (caso α 1 = β 1 = 0). Per questi casi valgono proprietà<br />
supp<strong>le</strong>mentari ad esempio la seguente:<br />
q(x)<br />
µ 0 ≥ ω := inf<br />
x∈(a,b) ρ(x) . (2.20)<br />
Infatti, <strong>per</strong> con<strong>di</strong>zioni <strong>di</strong> Neumann o <strong>di</strong> Dirich<strong>le</strong>t, una singola integrazione <strong>per</strong><br />
parti ci <strong>per</strong>mette <strong>di</strong> scrivere<br />
〈Au,u〉 =<br />
∫ b<br />
a<br />
(pu ′ u ′ +quu)dx =<br />
∫ b<br />
e quin<strong>di</strong> se u = u n è un’autofunzione si ha<br />
a<br />
(p|u ′ | 2 +q|u| 2) ∫ b<br />
dx ≥ q m |u| 2 ρdx<br />
〈Au n ,u n 〉 = µ n ‖u n ‖ 2 ≥ ω‖u n ‖ 2 ,<br />
da cui segue la (2.20). Notiamo, in particolare, che se q ≥ 0 gli autovalori sono<br />
non-negativi e va<strong>le</strong> la proprietà 〈Au,u〉 ≥ 0, <strong>per</strong> cui A è quello che si chiama un<br />
o<strong>per</strong>atore semidefinito positivo.<br />
2 In particolare, in un estremo in cui il prob<strong>le</strong>ma è singolare si avrà che anche u ′ è limitata<br />
<strong>per</strong>ché la con<strong>di</strong>zione u ′′ ∈ X implica che u ′ (x) = ∫ x<br />
x u ′′ (y)dy < ∞ <strong>per</strong> ogni a ≥ x ≥ b.<br />
0<br />
Pertanto l’annullarsi <strong>di</strong> p al bordo comporta l’annularsi <strong>di</strong> tutto il prodotto p(uv ′ −u ′ v).<br />
a
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 30<br />
Osservazione 2.4 IlTeorema2.2può essereestesoin varimo<strong>di</strong> affinchétutte o<br />
alcune del<strong>le</strong> conclusioni (i)-(v) continuino a va<strong>le</strong>re sotto con<strong>di</strong>zioni più generali.<br />
Ad esempio, almeno <strong>per</strong> con<strong>di</strong>zioni <strong>di</strong> Dirich<strong>le</strong>t, l’ipotesi che q sia continua fino<br />
agli estremi dell’intervallo [a,b] può essere sostituita con l’ipotesi più debo<strong>le</strong> che<br />
(x−a)q(x) e (b−x)q(x) siano funzioni continue su [a,b] (ve<strong>di</strong> [5]).<br />
Le con<strong>di</strong>zioni miste agli estremi possono essere sostituite con con<strong>di</strong>zioni <strong>per</strong>io<strong>di</strong>che.<br />
In questo caso l’unicità dell’autovalore <strong>per</strong> ogni autofunzione non è<br />
più garantita. (ne abbiamo visto un esempio risolvendo il primo dei prob<strong>le</strong>mi<br />
(2.4): allo stesso autovalore m 2 corrispondono due autofunzioni, e imθ e e −imθ<br />
e <strong>di</strong> conseguenza ci sono una successione “ascendente” e una “<strong>di</strong>scendente” <strong>di</strong><br />
autofunzioni);<br />
Inoltre l’intervallo [a,b] può essere illimitato da una o da entrambe <strong>le</strong> parti (in<br />
altre paro<strong>le</strong>, possiamo considerare −∞ ≤ a < b ≤ +∞). In questo caso si deve<br />
richiedere<br />
√<br />
lim ρ(x)u(x) = 0<br />
|x|→∞<br />
(e inoltre ci vogliono opportune ipotesi sul comportamento <strong>di</strong> q all’infinito).<br />
Infine si possono considerare prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong> in cui <strong>le</strong> funzioni p, q<br />
e ρ non sono regolari ma sod<strong>di</strong>sfano solamente ipotesi <strong>di</strong> integrabilità.<br />
Per queste e altre estensioni si può consultare la dettagliata monografia [15].<br />
Ve<strong>di</strong>amo ora alcuni esempi <strong>di</strong> particolare interesse.<br />
Esempio 2.5 Consideriamo il prob<strong>le</strong>ma <strong>di</strong> S-L (già incontrato nel risolvere il<br />
prob<strong>le</strong>ma della corda vibrante con estremi fissi):<br />
⎧<br />
⎪⎨<br />
d 2<br />
dx2u(x)+µu(x) = 0, 0<br />
⎪⎩<br />
u(0) = u(l) = 0.<br />
< x < l<br />
Si ha in questo caso a = 0, b = l, ρ ≡ 1, p ≡ 1, q ≡ 0. Le soluzioni sono<br />
u n (x) = sin nπx ( nπ<br />
) 2,<br />
l , µ n = n = 1,2,...<br />
l<br />
(2.21)<br />
Esempio 2.6 Consideriamo il prob<strong>le</strong>ma <strong>di</strong> S-L incontrato nel risolvere il prob<strong>le</strong>ma<br />
del tamburo circolare: 3<br />
⎧<br />
⎪⎨<br />
d 2<br />
1 d<br />
dx 2u(x)+ xdx ⎪⎩<br />
u(0) < ∞, u(r) = 0<br />
ν2<br />
u(x)−<br />
x2u(x)+µu(x) = 0, 0 < x < r,<br />
(2.22)<br />
(ν è un intero non-negativo fissato). Si ha in questo caso a = 0, b = r, ρ(x) = x,<br />
p(x) = x, q(x) = ν2<br />
x<br />
. Le soluzioni sono:<br />
u n (x) = J ν<br />
( ξ<br />
ν<br />
n x<br />
r<br />
) ( ) ξ<br />
ν 2<br />
, µ n = n<br />
, n = 0,1,2,...<br />
r<br />
3 Osserviamo che, cercando una soluzione in serie <strong>di</strong> potenze, avevamo implicitamente<br />
imposto la con<strong>di</strong>zione <strong>di</strong> finitezza in in x = 0.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 31<br />
dove J ν è la funzione <strong>di</strong> Bessel <strong>di</strong> prima specie <strong>di</strong> or<strong>di</strong>ne ν e ξ ν n sono i suoi<br />
zeri positivi.<br />
Più in genera<strong>le</strong>, l’equazione <strong>di</strong>fferenzia<strong>le</strong> <strong>di</strong> Bessel<br />
1 d ν2<br />
dx 2u(x)+ u(x)−<br />
xdx x 2u(x)+µu(x) = 0<br />
ammette una soluzione generica del tipo<br />
d 2<br />
u(x) = αJ ν (x)+βN ν (x)<br />
dove α e β sono costanti arbitrarie e N ν è la cosiddetta funzione <strong>di</strong> Neumann<br />
(o funzione <strong>di</strong> Bessel <strong>di</strong> seconda specie) <strong>di</strong> or<strong>di</strong>ne ν. Le funzioni <strong>di</strong> Neumann<br />
sono singolari in x = 0 ed è <strong>per</strong> questo che il prob<strong>le</strong>ma (2.22) ha soluzioni solo<br />
del tipo J ν (cioè con β = 0). Soluzioni del tipo u(x) = αJ ν (x) + βN ν (x) si<br />
incontrano risolvendo il prob<strong>le</strong>ma “regolare” dato dall’equazione <strong>di</strong> Bessel su<br />
un intervallo [r min ,r max ] con r min > 0.<br />
Esempio 2.7 Consideriamo ora il prob<strong>le</strong>ma <strong>di</strong> S-L:<br />
⎧ (<br />
1 d ⎪⎨ sinθ d )u(θ)− m2<br />
sinθ dθ dθ sin 2 u(θ)+µu(θ) = 0, 0 < θ < π,<br />
θ<br />
⎪⎩<br />
u(0) < ∞, u(π) < ∞<br />
(2.23)<br />
(m ≥ 0 è un qualunque intero non-negativo fissato). Si ha in questo caso a = 0,<br />
b = π, ρ(θ) = sinθ, p(θ) = sinθ, q(θ) = m2<br />
sinθ<br />
. Le soluzioni sono:<br />
u l (θ) = P m l (cosθ), µ m l = l(l+1), l = m, m+1, m+2,...<br />
dove <strong>le</strong> funzioni P m l<br />
(x) sono definite da:<br />
Pl m (x) = (1−x2 m/2 dm<br />
)<br />
dx m P l(x)<br />
e <strong>le</strong> funzioni P l (x) ≡ Pl 0 (x) sono definite da:<br />
d l<br />
P l (x) = 1<br />
2 l l! dx l(x2 −1) l ,<br />
cosicché risulta<br />
Pl m (x) = (1−x2 ) m/2 d m+l<br />
2 l l! dx m+l(x2 −1) l . (2.24)<br />
Le funzioni P l (x) si chiamano polinomi <strong>di</strong> Legendre mentre <strong>le</strong> Pl m (x) sono<br />
<strong>le</strong> funzioni <strong>di</strong> Legendre associate. Queste sod<strong>di</strong>sfano la seguente relazione <strong>di</strong><br />
ortogonalità<br />
∫ 1<br />
−1<br />
Pl m (x)Pl m (x)dx = 2 (l+m)!<br />
′<br />
2l+1 (l−m)! δ ll ′, l,l′ ≥ m, (2.25)<br />
<strong>per</strong> ogni m ≥ 0 fissato. Notiamo che, essendo<br />
∫ 1<br />
−1<br />
P m l (x)Pm l ′ (x)dx = ∫ π<br />
0<br />
Pl m (cosθ)Pm l ′ (cosθ) sinθdθ,<br />
la (2.25) si può correttamente interpretare come relazione <strong>di</strong> ortogonalità nello<br />
spazio <strong>di</strong> Hilbert L 2 ((0,π),sinθdθ).
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 32<br />
Esempio 2.8 Consideriamo il prob<strong>le</strong>ma <strong>di</strong> S-L:<br />
⎧<br />
⎪⎨ d 2<br />
dx 2u(x)−x2 u(x)+µu(x) = 0, x ∈ R,<br />
⎪⎩<br />
u(x) → 0 <strong>per</strong> x → ±∞.<br />
(2.26)<br />
Si ha in questo caso a = −∞, b = +∞, ρ ≡ 1, p ≡ 1, q = x 2 . Le soluzioni sono:<br />
u n (x) = e −x2 /2 H n (x), µ n = 2n+1, n = 0,1,2,... (2.27)<br />
dove <strong>le</strong> funzioni H n (x) sono i polinomi <strong>di</strong> Hermite, definiti da<br />
d n<br />
dx n e−x2 = (−1) n H n (x)e −x2<br />
(cioè sono, a meno del segno, i fattori polinomiali nel<strong>le</strong> derivate <strong>di</strong> e −x2 ). Si ha,<br />
ad esempio, H 0 = 1, H 1 (x) = 2x, H 2 (x) = 4x 2 −2.<br />
Esempio 2.9 Consideriamo infine il prob<strong>le</strong>ma <strong>di</strong> S-L:<br />
⎧ (<br />
d ⎪⎨ x d ) ( ) x<br />
u(x)−<br />
dx dx 4 + s2<br />
u(x)+µu(x) = 0, x > 0,<br />
4x<br />
⎪⎩<br />
u(0) < ∞ e u(x) → 0 <strong>per</strong> x → +∞<br />
(2.28)<br />
(s è un intero non-negativo fissato). Si ha in questo caso a = 0, b = +∞, ρ ≡ 1,<br />
p(x) = x, q(x) = x 4 + s2<br />
4x<br />
. Le soluzioni sono:<br />
u n,s (x) = c s nx s/2 e −x/2 L s n(x) µ s n = n+ s+1 , n ≥ 0, (2.29)<br />
2<br />
dove c s n è un fattore <strong>di</strong> normalizzazione, dato da<br />
e <strong>le</strong> funzioni L s n(x) sono definite da<br />
c s n = √ n!(n+s)!(2n+s+1), (2.30)<br />
L s n(x) = ex<br />
x s d n<br />
dx n (<br />
e −x x n+s) . (2.31)<br />
Queste ultime risultano essere dei polinomi. Quelli <strong>di</strong> tipo L 0 n sono i polinomi<br />
<strong>di</strong> Laguerre mentre in genera<strong>le</strong> gli L s n sono detti polinomi <strong>di</strong> Laguerre<br />
generalizzati (o “associati”).<br />
2.3 Armoniche Sferiche<br />
Possiamo interpretare lo sviluppo in serie <strong>di</strong> Fourier come lo sviluppo <strong>di</strong> una<br />
funzione definita sulla circonferenza unitaria S 1 :<br />
f(θ) = ∑ n∈Zf n e inθ .
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 33<br />
Analogamente, lo sviluppo in serie <strong>di</strong> Fourier su un rettangolo lo possiamo<br />
interpretare come lo sviluppo <strong>di</strong> una funzione definita sul toro bi<strong>di</strong>mensiona<strong>le</strong><br />
T 2 :<br />
f(θ,ϕ) = ∑<br />
f mn e i(mθ+nϕ)<br />
m,n∈Z<br />
e, più in genera<strong>le</strong>, la serie <strong>di</strong> Fourier n-<strong>di</strong>mensiona<strong>le</strong> (1.51) corrisponderà allo<br />
sviluppo <strong>di</strong> funzioni definite sul toro T n . Vogliamo ora vedere l’analogo dello<br />
sviluppo <strong>di</strong> Fourier <strong>per</strong> funzioni definite sulla sfera unitaria S 2 . Poiché <strong>le</strong><br />
funzioni e inθ sono autofunzioni dell’o<strong>per</strong>atore derivata seconda su S 1 (<strong>di</strong>fatti<br />
d 2<br />
dθ 2 e inθ = −n 2 e inθ e e in(θ+2π) = e inθ ), l’idea è quella <strong>di</strong> andare a cercare <strong>le</strong><br />
autofunzioni della “derivata seconda” sulla sfera, ovvero dell’o<strong>per</strong>atore Laplaciano<br />
sferico. Per introdurre in maniera appropriata ta<strong>le</strong> o<strong>per</strong>atore, ricor<strong>di</strong>amo<br />
il sistema del<strong>le</strong> coor<strong>di</strong>nate polari <strong>di</strong> R 3 :<br />
ϕ<br />
z<br />
θ<br />
ρ<br />
y<br />
x = ρ sinθ cosϕ<br />
y = ρ sinθ sinϕ<br />
z = ρ cosθ<br />
θ ∈ (0,π) = angolo polare,<br />
ϕ ∈ (−π,π) = angolo azimuta<strong>le</strong>,<br />
x<br />
determinante Jacobiano = ρ 2 sinθ<br />
L’o<strong>per</strong>atore Laplaciano (tri<strong>di</strong>mensiona<strong>le</strong>) espresso in tali coor<strong>di</strong>nate è dato da<br />
˜∆ = 1 (<br />
∂<br />
ρ 2 ρ 2 ∂ )<br />
+<br />
∂ρ ∂ρ<br />
1<br />
ρ 2 sinθ<br />
(<br />
∂<br />
sinθ ∂ )<br />
+<br />
∂θ ∂θ<br />
1<br />
ρ 2 sin 2 θ<br />
∂ 2<br />
∂ϕ 2 . (2.32)<br />
Se lo facciamo agire su una funzione definita su S 2 (sempre interpretabi<strong>le</strong> come<br />
una funzione definita su R 3 che non <strong>di</strong>pende da ρ e che restringiamo a ρ = 1),<br />
otteniamo il Laplaciano sferico (o o<strong>per</strong>atore <strong>di</strong> Laplace-Beltrami 4 sulla sfera):<br />
∆ S2 = 1<br />
sinθ<br />
(<br />
∂<br />
sinθ ∂ )<br />
+ 1<br />
∂θ ∂θ sin 2 θ<br />
∂ 2<br />
∂ϕ 2 . (2.33)<br />
Cerchiamo allora gli autovalori e <strong>le</strong> autofunzioni <strong>di</strong> ∆ S2 , o meglio <strong>di</strong> −∆ S2 ,<br />
risolvendo il prob<strong>le</strong>ma<br />
{<br />
∆S2 u(θ,ϕ)+µu(θ,ϕ) = 0, 0 < θ < π, ϕ ∈ R,<br />
(2.34)<br />
u(θ,ϕ) = u(θ,ϕ+2π).<br />
4 In genera<strong>le</strong>, l’o<strong>per</strong>atore <strong>di</strong> Laplace-Beltrami su una varietà Riemanniana (corrispondente<br />
al “Laplaciano” sulla varietà) è definito, in un sistema <strong>di</strong> coor<strong>di</strong>nate locali, come<br />
∆ LB f = √ 1 (√ )<br />
∂ i |g|g ij ∂ j f , |g| := |detg ij |.<br />
|g|
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 34<br />
Se tentiamo una soluzione a variabili separate, u(θ,ϕ) = Θ(θ)Φ(ϕ), otteniamo<br />
(<br />
1 d<br />
sinθ dΘ )<br />
Φ+ Θ d 2 Φ<br />
sinθ dθ dθ sin 2 +µΘΦ = 0,<br />
θ dϕ2 e quin<strong>di</strong> (usando gli apici <strong>per</strong> denotare <strong>le</strong> derivate)<br />
(sinθΘ ′ ) ′<br />
Θsinθ<br />
il che implica che esiste η ∈ C ta<strong>le</strong> che<br />
+ 1 Φ ′′<br />
sin 2 +µ = 0,<br />
θ Φ<br />
sinθ<br />
Θ (sinθΘ′ ) ′ +sin 2 θµ = − Φ′′<br />
Φ = η.<br />
Il prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong> <strong>per</strong> Φ, tenuto conto del fatto che ϕ è una coor<strong>di</strong>nata<br />
<strong>per</strong>io<strong>di</strong>ca, è<br />
{ Φ ′′ +ηΦ = 0<br />
che, come già sappiamo, ha soluzioni<br />
Φ(ϕ) = Φ(ϕ+2π),<br />
Φ m (ϕ) = e imϕ , η m = m 2 , m ∈ Z. (2.35)<br />
Una volta fissato η = η m = m 2 , il prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong> <strong>per</strong> Θ è<br />
(<br />
1 d<br />
sinθ dΘ ) )<br />
+<br />
(µ− m2<br />
sinθ dθ dθ sin 2 Θ = 0,<br />
θ<br />
<strong>per</strong> il qua<strong>le</strong> cerchiamo soluzioni limitate in θ = 0 e θ = π. Siamo <strong>per</strong>ciò <strong>di</strong><br />
fronte al prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong> considerato nell’esempio 2.7, <strong>per</strong> il qua<strong>le</strong><br />
sappiamo che la soluzione è data dal<strong>le</strong> funzioni <strong>di</strong> Legendre<br />
Θ m l<br />
(θ) = P|m|<br />
l<br />
(cosθ), µ = l(l+1), l ≥ |m|.<br />
Le soluzioni trovate <strong>per</strong> separazione <strong>di</strong> variabili sono dunque<br />
⎧<br />
⎨u lm (θ,ϕ) = Θ m l (θ)Φ m(ϕ) = P |m|<br />
l<br />
(cosθ)e imϕ<br />
⎩µ lm = l(l+1), m ∈ Z, l ≥ |m|.<br />
(2.36)<br />
e sono dette armoniche sferiche. Notiamo che, fissato l ≥ 0, ci sono 2l+1<br />
<strong>di</strong>verse armoniche sferiche u lm .<br />
Ricordando <strong>le</strong> relazioni <strong>di</strong> ortogonalità (2.25) del<strong>le</strong> funzioni <strong>di</strong> Legendre e (1.2)<br />
del<strong>le</strong> funzioni e imϕ , si possono normalizzare <strong>le</strong> funzioni u lm e ridefinire <strong>le</strong> armoniche<br />
sferiche come<br />
<strong>per</strong> cui si ha<br />
∫ π<br />
0<br />
Y m l (θ,ϕ) =<br />
√<br />
2l+1(l−m)!<br />
4π (l+m)! P|m| l<br />
(cosθ)e imϕ , (2.37)<br />
∫ π [<br />
]<br />
dθ dϕ Yl m (θ,ϕ)Ym′ l<br />
(θ,ϕ) sinθ = δ ′ ll ′ δ mm ′, (2.38)<br />
−π
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 35<br />
<strong>per</strong> m,m ′ ∈ Z e l ≥ |m|, l ′ ≥ |m ′ |. Osservando che dσ = sinθdθdϕ è l’e<strong>le</strong>mento<br />
<strong>di</strong> su<strong>per</strong>ficie della sfera <strong>di</strong> raggio 1, possiamo riscrivere la precedente equazione<br />
come relazione <strong>di</strong> ortonormalità nello spazio <strong>di</strong> Hilbert L 2 (S 2 ,C):<br />
∫<br />
Yl m Yl m′ dσ = δ ′ ll ′ δ mm ′ , (2.39)<br />
S 2<br />
Vogliamo ora sviluppare una funzione f definita sulla sfera S 2 , <strong>per</strong> la qua<strong>le</strong><br />
utilizzeremo la rappresentazione in coor<strong>di</strong>nate sferiche f(θ,ϕ), in una serie <strong>di</strong><br />
armoniche sferiche:<br />
f(θ,ϕ) = ∑ m∈Z<br />
∑<br />
l≥|m|<br />
f lm Y m l (θ,ϕ) = +∞ ∑<br />
l∑<br />
l=0 m=−l<br />
f lm Y m l<br />
(θ,ϕ). (2.40)<br />
Se f ∈ L 2 (S 2 ,C) possiamo trovare i coefficienti f lm moltiplicando <strong>per</strong> Yl m entrambi<br />
i membri della (2.40) e integrando su S 2 in dσ. Usando la (2.39) si<br />
ottiene<br />
∫<br />
f lm = Yl m f dσ<br />
S 2<br />
ovvero, più esplicitamente,<br />
f lm =<br />
∫ π<br />
0<br />
∫ π<br />
]<br />
dθ dϕ<br />
[Yl m(θ,ϕ)f(θ,ϕ) sinθ . (2.41)<br />
−π<br />
Come sempre siamo interessati a mettere meglio a fuoco il caso in cui f assume<br />
valori reali. In tal caso, osservando che<br />
si potrà scrivere<br />
∑ ∑<br />
m∈Z<br />
f l−m = f lm ,<br />
Y −m<br />
l<br />
= Y m l ,<br />
∑ (<br />
flm Yl m )<br />
+f lm Yl<br />
m<br />
lm Yl l≥|m|f m = ∑ l0 Yl l≥0f 0 + ∑ m≥1 l≥m<br />
= ∑ f l0 Yl 0 +2 ∑ ∑<br />
Re(f lm Yl m )<br />
l≥0 m≥1 l≥m<br />
e <strong>per</strong>ciò, posto<br />
{<br />
fl0 , se m = 0,<br />
a lm =<br />
2Ref lm , se m ≥ 1,<br />
b lm =<br />
{<br />
0, se m = 0,<br />
−2Imf lm , se m ≥ 1,<br />
(2.42)<br />
si avrà lo sviluppo in armoniche sferiche reali:<br />
f(θ,ϕ) = ∑ ∑ [<br />
alm Yl m (θ,ϕ)+b lmY −m<br />
l<br />
(θ,ϕ) ] , (2.43)<br />
m≥0 l≥m<br />
dove<br />
Y m<br />
l = Re(Y m l ) =<br />
Y −m<br />
l<br />
√<br />
= Im(Y m l ) = √<br />
2l+1(l−m)!<br />
4π (l+m)! Pm l (cosθ) cos(mϕ), m ≥ 0<br />
(2.44)<br />
2l+1(l−m)!<br />
4π (l+m)! Pm l (cosθ) sin(mϕ), m ≥ 1.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 36<br />
Figura 2.3: Alcune armoniche sferiche rappresentate me<strong>di</strong>ante toni <strong>di</strong> grigio sulla<br />
sfera. Si notino meri<strong>di</strong>ani e paral<strong>le</strong>li nodali e si ricor<strong>di</strong> che <strong>le</strong> figure con m negativo<br />
π<br />
si ottengono dal<strong>le</strong> corrispondenti con m positivo tramite una rotazione <strong>di</strong> attorno 2m<br />
al’asse polare.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 37<br />
Osservazione 2.10 Comegiàosservatonella<strong>di</strong>scussionesultamburocircolare,<br />
<strong>le</strong> funzioni cos(mϕ) e sin(mϕ) hanno m zeri in [0,π) più altri m a <strong>di</strong>stanza<br />
π. Dunque l’armonica sferica Yl<br />
m ha 2m meri<strong>di</strong>ani nodali opposti (ovvero m<br />
cerchi massimi nodali). D’altra parte, come sappiamo dalla teoria genera<strong>le</strong> dei<br />
prob<strong>le</strong>mi <strong>di</strong> Sturm-Liouvil<strong>le</strong>, <strong>per</strong> ogni m ≥ 0 fissato, <strong>le</strong> funzioni <strong>di</strong> Legendre<br />
Pl m (cosθ), l = m,m + 1,m + 2,..., hanno esattamente l − m zeri in (0,π)<br />
(nel caso del<strong>le</strong> funzioni <strong>di</strong> Legendre tali zeri sono sempre simmetrici rispetto a<br />
θ = π/2 in quanto Pl m(x) = ±Pm m<br />
l (−x)). Ne consegue che l’armonica sferica Yl<br />
ha l−m paral<strong>le</strong>li nodali. Paral<strong>le</strong>li e meri<strong>di</strong>ani nodali delimitano sulla su<strong>per</strong>ficie<br />
della sfera max{2m,1}×(l−m+1) zone a segno alterno (ve<strong>di</strong> figura 2.3).<br />
Osservazione 2.11 Un risultato uti<strong>le</strong> nel<strong>le</strong> applicazioni è il Teorema <strong>di</strong> ad<strong>di</strong>zione<br />
del<strong>le</strong> armoniche sferiche: se due vettori <strong>di</strong> coor<strong>di</strong>nate polari (ρ,θ,ϕ) e<br />
(ρ ′ ,θ ′ ,ϕ ′ ) formano fra loro un angolo 5 γ, allora si ha<br />
P l (cosγ) = 4π<br />
2l+1<br />
l∑<br />
m=−l<br />
Y m l (θ′ ,ϕ ′ )Y m l<br />
(θ,ϕ). (2.45)<br />
2.4 Il modello quantistico dell’atomo d’idrogeno<br />
Ricor<strong>di</strong>amo alcuni postulati fondamentali della meccanica quantistica.<br />
1. Lo stato <strong>di</strong> una particella è descritto da una funzione d’onda<br />
ψ ∈ L 2 (R 3 ,C), ‖ψ‖ 2<br />
= 1;<br />
2. ilmoduloquadrato|ψ(x)| 2 dellafunzioned’ondaèladensità<strong>di</strong> probabilità<br />
<strong>di</strong> trovare la particella nella posizione x;<br />
3. i possibili valori E dell’energia della particella si trovano risolvendo l’equazione<br />
<strong>di</strong> Schrö<strong>di</strong>nger stazionaria<br />
Hψ = Eψ, (2.46)<br />
ovvero ricercando autovalori e autovettori dell’o<strong>per</strong>atore H, detto Hamiltoniana<br />
(quantistica) del sistema; gli autovettori ψ E relativi all’autovalore<br />
E (detti “autostati”) sono stati stazionari in cui l’energia del sistema<br />
assume con certezza il valore E;<br />
4. l’Hamiltoniana quantistica si ottiene da quella classica con la sostituzione<br />
p −→ −i∇,<br />
(dove = h/2π e h è la costante <strong>di</strong> Planck, h ≈ 6.63×10 −34 Js); dunque,<br />
se l’Hamiltoniana classica ha la forma p2<br />
2m<br />
+V(x), si ha<br />
H = − 2<br />
2m ∆+V.<br />
5 Risulta che cosγ = cosθcosθ ′ +sinθsinθ ′ cos(ϕ−ϕ ′ ).
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 38<br />
Il modello quantistico dell’atomo <strong>di</strong> idrogeno, ovvero <strong>di</strong> un e<strong>le</strong>ttrone nel campo<br />
e<strong>le</strong>ttrico generato da una carica positiva puntiforme posta nell’origine, si ottiene<br />
considerando il potenzia<strong>le</strong> Coulombiano attrattivo<br />
ovvero l’Hamiltoniana quantistica<br />
V(x) = − e2<br />
4πǫ 0 |x|<br />
H = − 2<br />
∆−<br />
e2<br />
2m e 4πǫ 0 |x| ,<br />
dove m e è la massa dell’e<strong>le</strong>ttrone. I possibili livelli energetici dell’atomo d’idrogeno<br />
si trovano dunque risolvendo il prob<strong>le</strong>ma agli autovalori<br />
dove <strong>per</strong> brevità si è posto<br />
−c∆ψ(x)− α<br />
|x| ψ(x) = Eψ(x), ψ ∈ L2 (R 3 ,C). (2.47)<br />
c := 2<br />
2m e<br />
,<br />
α := e2<br />
4πǫ 0<br />
.<br />
Data la simmetria del prob<strong>le</strong>ma conviene passare al<strong>le</strong> cooor<strong>di</strong>nate polari, <strong>per</strong><br />
cui la precedente equazione <strong>di</strong>venta<br />
[ ( c ∂<br />
ρ 2 ρ 2 ∂ ) (<br />
c ∂<br />
+<br />
∂ρ ∂ρ ρ 2 sinθ ∂ )<br />
c ∂ 2<br />
+<br />
sinθ ∂θ ∂θ ρ 2 sin 2 θ ∂ϕ 2 + α ]<br />
ρ +E ˜ψ = 0<br />
ovvero, ricordando la definizione del Laplaciano sferico (2.33),<br />
[ ( c ∂<br />
ρ 2 ρ 2 ∂ )<br />
+ c<br />
∂ρ ∂ρ ρ 2 ∆ S 2<br />
+ α ]<br />
ρ +E ˜ψ = 0. (2.48)<br />
Cerchiamo una soluzione a variabili separate, della forma<br />
˜ψ(ρ,θ,ϕ) = R(ρ)S(θ,ϕ).<br />
Sostituendo nella precedente equazione si ottiene<br />
da cui, moltiplicando <strong>per</strong><br />
c<br />
ρ 2 (ρ2 R ′ ) ′ S + cR<br />
ρ 2 ∆ S 2<br />
S +<br />
(ρ 2 R ′ ) ′<br />
( α<br />
ρ +E )<br />
RS = 0<br />
ρ 2<br />
cRS<br />
, si ha che deve esistere µ ∈ C ta<strong>le</strong> che<br />
R + ρ c (α+Eρ) = −∆ S 2<br />
S<br />
S<br />
= µ. (2.49)<br />
Come sappiamo, l’equazione −∆ S2 S = µS ha come soluzioni <strong>le</strong> armoniche<br />
sferiche:<br />
µ = µ lm = l(l+1), S(θ,ϕ) = Y m l (θ,ϕ), m ∈ Z, l ≥ |m|.<br />
Fissati l e m, dunque, il prob<strong>le</strong>ma <strong>per</strong> la parte ra<strong>di</strong>a<strong>le</strong> <strong>di</strong>venta<br />
[ ρ<br />
]<br />
ρ 2 R ′′ +2ρR ′ +<br />
c (α+Eρ)−l(l+1) R = 0 (2.50)
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 39<br />
e, posto g(ρ) = √ ρR(ρ) si ottiene <strong>per</strong> g(ρ) l’equazione<br />
[ ρ<br />
ρ 2 g ′′ +ρg ′ +<br />
c<br />
]<br />
(2l+1)2<br />
(α+Eρ)− g = 0.<br />
4<br />
Supponiamoora<strong>di</strong>restringerelaricercadel<strong>le</strong>soluzionialcasoE < 0(inanalogia<br />
col caso classico dove <strong>le</strong> soluzioni del prob<strong>le</strong>ma <strong>di</strong> Kep<strong>le</strong>ro con energia E < 0<br />
sono orbite chiuse). Allora col cambio <strong>di</strong> variabi<strong>le</strong><br />
ξ = 2 √ (<br />
−E/c ρ, g(ρ) = f 2 √ )<br />
−E/c ρ ,<br />
si ottiene <strong>per</strong> f(ξ) l’equazione<br />
[<br />
ξ 2 f ′′ +ξf ′ +<br />
Dividendo <strong>per</strong> ξ e ponendo<br />
si ottiene infine<br />
[<br />
ξf ′′ +f ′ + λ−<br />
αξ<br />
2 √ −cE − ξ2<br />
4 − (2l+1)2<br />
4<br />
α<br />
λ =<br />
2 √ −cE<br />
( ξ<br />
4 + (2l+1)2<br />
4ξ<br />
]<br />
f = 0.<br />
)]<br />
f = 0, (2.51)<br />
che è un’equazione <strong>di</strong> Laguerre con s = 2l+1 (ve<strong>di</strong> Esempio 2.9). Sappiamo<br />
allora che gli autovalori sono dati da<br />
λ = n r + s+1<br />
2<br />
Esprimendo E in funzione <strong>di</strong> λ si ottiene<br />
da cui, posto<br />
= n r +l+1, n r = 0,1,2,....<br />
α 2<br />
E = −<br />
4c(n r +l+1) 2<br />
n = n r +l+1,<br />
e ricordando <strong>le</strong> definizioni <strong>di</strong> c e α, si ottengono i possibili livelli energetici<br />
dell’atomo d’idrogeno:<br />
E n = − e4 m e<br />
32π 2 ǫ 2 0 2 1<br />
n 2 = − e4 m e<br />
8ǫ 2 0 h2 1<br />
n 2 , n = 1,2,3,....<br />
Risulta che il fattore e4 m e<br />
8ǫ 2 0 h2 va<strong>le</strong> all’incirca 13.6eV. Ora, si può <strong>di</strong>mosrare che<br />
gli stati e<strong>le</strong>ttronici <strong>di</strong> energia E ≥ 0 corrispondono a stati in cui l’e<strong>le</strong>ttrone non<br />
è più <strong>le</strong>gato al protone. Pertanto l’energia <strong>di</strong> 13.6eV è la cosiddetta energia <strong>di</strong><br />
ionizzazione dell’atomo d’idrogeno. Il valore trovato teoricamente corrisponde<br />
<strong>per</strong>fettamente al valore trovato <strong>per</strong> via s<strong>per</strong>imenta<strong>le</strong>. Anche <strong>le</strong> misure del<strong>le</strong><br />
energie <strong>di</strong> transizione fra un livello e l’altro (lo spettro dell’idrogeno) hanno un<br />
ottimo accordo con i dati s<strong>per</strong>imentali.
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 40<br />
Peridentificare<strong>le</strong>autofunzionira<strong>di</strong>aliconvieneutlizzaregliin<strong>di</strong>cinel,piuttosto<br />
che n r e l. Sappiamo quin<strong>di</strong> dall’Esempio 2.9 che tali autofunzioni si possono<br />
esprimere esplicitamente in termini <strong>di</strong> polinomi <strong>di</strong> Laguerre:<br />
f n,l (ξ) = c 2l+1<br />
n r<br />
ξ 2l+1<br />
2 e −ξ/2 L 2l+1<br />
n r<br />
(ξ) = c 2l+1<br />
n−l−1 ξ 2l+1<br />
2 e −ξ/2 L 2l+1<br />
n−l−1 (ξ).<br />
Quin<strong>di</strong>, ponendo<br />
κ n := 2 √ −E n /c = α<br />
2cn = e2 m e<br />
4πǫ 0 2 n ,<br />
e risostituendo g(ρ) = f(2 √ E n /cρ) = f(κ n ρ) e R(ρ) = ρ −1/2 g(ρ), possiamo<br />
scrivere<br />
R n,l (ρ) = ρ −1/2 f n,l (κ n ρ) = c 2l+1<br />
n−l−1 κ2l+1 2<br />
n ρ l e −κnρ/2 L 2l+1<br />
n−l−1 (κ nρ). (2.52)<br />
Leautofunzionicomp<strong>le</strong>te,detteancheorbitalidell’atomo<strong>di</strong>idrogeno,sonoinfine<br />
date da<br />
˜ψ n,l,m (ρ,θ,ϕ) = R n,l (ρ)Y m l (θ,ϕ). (2.53)<br />
Gli in<strong>di</strong>ci che abbiamo utilizzato <strong>per</strong> identificare gli orbitali sono i cosiddetti<br />
• numero quantico principa<strong>le</strong>: n = n r +l+1 = 1,2,3,...,<br />
• numero quantico orbita<strong>le</strong>: l = 0,1,2,...,n−1,<br />
• numero quantico magnetico: −l ≤ m ≤ l<br />
(n r si chiama numero quantico ra<strong>di</strong>a<strong>le</strong>). Notiamo che <strong>per</strong> ogni n fissato ci sono<br />
n−1<br />
∑<br />
n−1<br />
∑<br />
(2l+1) = 2 l+n = 2 n(n−1)<br />
2<br />
l=0<br />
l=0<br />
+n = n 2<br />
orbitali che hanno la stessa energia E n . In termini più matematici, l’autospazio<br />
relativo all’autovalore E n ha <strong>di</strong>mensione n 2 .<br />
Un orbita<strong>le</strong> caratterizzato dai numeri quantici n, l e m (oppure da n r , l e<br />
m) presenta certe su<strong>per</strong>fici nodali in cui la funzione d’onda si annulla e che<br />
possiamo dedurre dalla <strong>di</strong>scussione già effettuata sul<strong>le</strong> armoniche sferiche (<strong>per</strong><br />
quanto riguarda la parte angolare) e dal punto (iv) del teorema 2.2 (<strong>per</strong> quanto<br />
riguarda la parte ra<strong>di</strong>a<strong>le</strong>). In particolare, avremo l−|m| coni nodali (su<strong>per</strong>fici<br />
con θ costante, che <strong>per</strong> θ = 0 sono piani orizzontali e che <strong>per</strong> θ ≠ 0 si presentano<br />
sempre a due falde simmetriche), |m| piani verticali nodali (su<strong>per</strong>fici con ϕ<br />
mod π costante) e n r (cioè n−l−1) sfere nodali (su<strong>per</strong>fici con ρ costante).<br />
Osservazione 2.12 Tipicamente, il numero quantico principa<strong>le</strong> è detto anche<br />
“livello energetico” e il numero quantico orbita<strong>le</strong> viene identificato da <strong>le</strong>ttere:<br />
“s” <strong>per</strong> l = 0, “p” <strong>per</strong> l = 1, “d” <strong>per</strong> l = 2, “f” <strong>per</strong> l = 3, “g” <strong>per</strong> l =<br />
4. Per caratterizzare comp<strong>le</strong>tamente un orbita<strong>le</strong> si introduce, piuttosto che<br />
l’in<strong>di</strong>cazione del numero quantico magnetico m, una particolare notazione che<br />
identifica <strong>le</strong> su<strong>per</strong>fici nodali angolari (che naturalmente <strong>di</strong>pendono da m). Ad
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE 41<br />
esempio, gli orbitali 2p x , 2p y e 2p z hanno n = 2, l = 1 e sono caratterizzati,<br />
rispettivamente, daipiani nodali x = 0, y = 0ez = 0 (corrispondentia m = −1,<br />
m = 1 e m = 0). L’orbita<strong>le</strong> 3d x 2 −y2 ha n = 3, l = 2 ed è caratterizzato dalla<br />
coppia <strong>di</strong> piani nodali x 2 −y 2 = 0 (ovvero x = y e x = −y), corrispondente a<br />
m = 2. L’orbita<strong>le</strong> 3d 2z 2 −x 2 −y 2 (<strong>di</strong> solito abbreviato in 3d z2) ha n = 3, l = 2<br />
e presenta il cono noda<strong>le</strong> descritto dall’equazione 2z 2 − x 2 − y 2 = 0 (ovvero<br />
cosθ = 1/ √ 3), corrispondente a m = 0.<br />
Per una piacevo<strong>le</strong> ed accurata gal<strong>le</strong>ria <strong>di</strong> orbitali atomici (e mo<strong>le</strong>colari) si può<br />
visitare il sito web www.shef.ac.uk/chemistry/orbitron/ (The Orbitron: a<br />
gal<strong>le</strong>ry of atomic and mo<strong>le</strong>cular orbitals). 6<br />
6 Sarà bene ricordare che quanto detto finora riguarda, a rigore, solamente l’atomo <strong>di</strong><br />
idrogeno. La descrizione resta inoltre valida anche <strong>per</strong> l’e<strong>le</strong>ttrone più esterno degli e<strong>le</strong>menti<br />
cosiddetti alcalini (la prima colonna a sinistra nella tavola <strong>per</strong>io<strong>di</strong>ca). Più in genera<strong>le</strong>, gli<br />
orbitali degli atomi con più e<strong>le</strong>ttroni hanno una struttura, in prima approssimazione, simi<strong>le</strong> a<br />
quella appena descritta (<strong>per</strong> cui si può parlare ancora <strong>di</strong> orbitali <strong>di</strong> tipo “s”, “p” ecc.) ma con<br />
una <strong>di</strong>fferenza fondamenta<strong>le</strong>: l’interazione coulombiana fra gli e<strong>le</strong>ttroni fa sì che orbitali che<br />
sarebbero energeticamente equiva<strong>le</strong>nti nel caso dell’idrogeno non lo siano più <strong>per</strong> atomi più<br />
complicati. È <strong>per</strong> questo motivo che gli orbitali degli atomi della tavola <strong>per</strong>io<strong>di</strong>ca hanno un<br />
particolare “or<strong>di</strong>ne <strong>di</strong> riempimento”, che segue la crescita dell’energia propria degli orbitali<br />
stessi.
Capitolo 3<br />
Trasformate <strong>di</strong> Fourier<br />
3.1 Trasformata <strong>di</strong> Fourier <strong>di</strong> funzioni integrabili<br />
Consideriamo il seguente prob<strong>le</strong>ma ai valori iniziali <strong>per</strong> l’equazione del<strong>le</strong> onde:<br />
⎧<br />
u tt (x,t) = c 2 u xx (x,t), x ∈ R, t > 0,<br />
⎪⎨ u(x,0) = ϕ(x), x ∈ R,<br />
(3.1)<br />
u t (x,0) = ψ(x), x ∈ R,<br />
⎪⎩ lim u(x,t) < ∞, t ≥ 0.<br />
|x|→∞<br />
Osserviamo che, a <strong>di</strong>fferenza dei prob<strong>le</strong>mi stu<strong>di</strong>ati finora, questo è posto sull’intera<br />
retta rea<strong>le</strong>, e <strong>le</strong> usuali con<strong>di</strong>zioni al contorno <strong>di</strong> Dirich<strong>le</strong>t o Neumann sono<br />
state sostituite dalla con<strong>di</strong>zione <strong>di</strong> finitezza della soluzione. Proviamo tuttavia<br />
a cercare come al solito una soluzione a variabili separate u(x,t) = X(x)T(t),<br />
che ci porta alla con<strong>di</strong>zione<br />
T ′′<br />
c 2 T = X′′<br />
X = µ ∈ C<br />
e al seguente prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong> <strong>per</strong> la X:<br />
⎧<br />
⎨X ′′ (x) = µX(x), x ∈ R<br />
⎩ lim X(x) < ∞. (3.2)<br />
|x|→∞<br />
Posto µ = λ 2 , la soluzione genera<strong>le</strong> dell’equazione X ′′ (x) = µX(x) è<br />
X(x) = ae λx +be −λx<br />
che non ha soluzioni limitate se Reλ ≠ 0. Dunque λ dev’essere del tipo λ = ik<br />
con k ∈ R. Si <strong>per</strong>viene <strong>per</strong>ciò alla conclusione che i µ ammissibili sono dati da<br />
µ = −k 2 , k ∈ R,<br />
42
CAPITOLO 3. TRASFORMATE DI FOURIER 43<br />
e <strong>le</strong> corrispondenti soluzioni del prob<strong>le</strong>ma <strong>di</strong> Sturm-Liouvil<strong>le</strong> sono<br />
X k (x) = ae ikx +be −ikx , k ∈ R, a, b ∈ C.<br />
Risolvendoanchel’equazione<strong>di</strong>fferenzia<strong>le</strong><strong>per</strong>T siottienelafamiglia<strong>di</strong>soluzioni<br />
a variabili separate<br />
u k (x,t) = [ a(k)e ikx +b(k)e −ikx] cos(ckt)+ [ c(k)e ikx +d(k)e −ikx] sin(ckt).<br />
Notiamo che l’evidente <strong>di</strong>fferenza col caso dell’intervallo finito consiste nel fatto<br />
cheadessolafamiglia<strong>di</strong>soluzioni<strong>di</strong>pendedall’in<strong>di</strong>cecontinuok chehasostituito<br />
l’in<strong>di</strong>ce <strong>di</strong>screto n. Si può pensare quin<strong>di</strong> <strong>di</strong> scrivere la soluzione genera<strong>le</strong>,<br />
almeno formalmente, come integra<strong>le</strong> su k ∈ R del<strong>le</strong> soluzioni u k :<br />
u(x,t) =<br />
∫ +∞<br />
−∞<br />
u k (x,t)dk =<br />
∫ +∞<br />
−∞<br />
[<br />
A(k)e ikx cos(ckt)+B(k)e ikx sin(ckt) ] dk,<br />
dove A(k) = a(k)+b(−k) e B(k) = c(k)−d(−k), <strong>per</strong> cui, affinché i dati iniziali<br />
siano sod<strong>di</strong>sfatti, ci ritroviamo con <strong>le</strong> con<strong>di</strong>zioni<br />
∫ +∞<br />
−∞<br />
A(k)e ikx dk = ϕ(x),<br />
∫ +∞<br />
−∞<br />
ckB(k)e ikx dk = ψ(x).<br />
Ci si trova quin<strong>di</strong> <strong>di</strong> fronte al seguente prob<strong>le</strong>ma genera<strong>le</strong>: data una funzione<br />
f(x), x ∈ R, determinare, se possibi<strong>le</strong>, una funzione F(k), k ∈ R, ta<strong>le</strong> che<br />
∫ +∞<br />
−∞<br />
F(k)e ikx dk = f(x). (3.3)<br />
Questo prob<strong>le</strong>ma è analogo a quello che ci eravamo posti all’inizio della <strong>di</strong>scussione<br />
sul<strong>le</strong> serie <strong>di</strong> Fourier, quando ci chiedevamo se fosse possibi<strong>le</strong> sviluppare<br />
una funzione <strong>per</strong>io<strong>di</strong>ca in una serie del tipo (1.1). Difatti, la (3.3) si può considerare<br />
la versione continua della serie <strong>di</strong> Fourier (1.1): la serie è <strong>di</strong>ventata un<br />
integra<strong>le</strong>, l’in<strong>di</strong>ce n è <strong>di</strong>ventato una variabi<strong>le</strong> continua 1 e i coefficienti <strong>di</strong> Fourier<br />
sono <strong>di</strong>venuti una funzione, F(k), detta trasformata <strong>di</strong> Fourier <strong>di</strong> f.<br />
Per analogia con i coefficienti <strong>di</strong> Fourier ci aspettiamo quin<strong>di</strong> che (a meno <strong>di</strong><br />
fattori <strong>di</strong> normalizzazione) la trasformata <strong>di</strong> Fourier abbia la forma<br />
F(k) =<br />
∫ +∞<br />
−∞<br />
f(x)e −ikx dx.<br />
Partendo da queste motivazioni, passiamo a introdurre e stu<strong>di</strong>are <strong>le</strong> trasformate<br />
<strong>di</strong> Fourier in un quadro rigoroso.<br />
1 Più esattamente, confrontando la (3.3) con la serie<strong>di</strong> Fourier 2l-<strong>per</strong>io<strong>di</strong>ca (1.25), siosserva<br />
che è la variabi<strong>le</strong> <strong>di</strong>screta k n = nπ/l a essere <strong>di</strong>ventata la variabi<strong>le</strong> continua k <strong>per</strong> l → ∞. I<br />
punti k n, <strong>per</strong> n ∈ Z, costituiscono il cosiddetto reticolo reciproco del reticolo <strong>per</strong>io<strong>di</strong>co 2ml,<br />
m ∈ Z. Se si interpreta la serie <strong>di</strong> Fourier come una sovrapposizione <strong>di</strong> oscillazioni e<strong>le</strong>mentari<br />
<strong>di</strong> frequenze k n/2π, possiamo interpretare la (3.3) come una sovrapposizione <strong>di</strong> oscillazioni<br />
e<strong>le</strong>mentari <strong>le</strong> cui frequenze k/2π variano in un continuo.
CAPITOLO 3. TRASFORMATE DI FOURIER 44<br />
Definizione 3.1 Si chiama trasformata <strong>di</strong> Fourier <strong>di</strong> f ∈ L 1 (R N ) la funzione<br />
∫<br />
1<br />
ˆf(k) := f(x)e −ik·x dx, k ∈ R N . (3.4)<br />
(2π) N/2 R n<br />
Osserviamo subito che ˆf(k) è ben definita, anzi, è limitata su R N , <strong>di</strong>fatti<br />
∫<br />
1<br />
|ˆf(k)| ≤ |f(x)|dx = c<br />
(2π) N/2 N ‖f‖ 1<br />
, (3.5)<br />
R n<br />
dove, <strong>per</strong> como<strong>di</strong>tà, abbiamo posto<br />
c N :=<br />
1<br />
. (3.6)<br />
(2π)<br />
N/2<br />
Possiamo <strong>di</strong>re, in altre paro<strong>le</strong>, che la trasformazione <strong>di</strong> Fourier f ↦→ ˆf è un’applicazione<br />
continua da L 1 (R N ) in L ∞ (R N ). Ve<strong>di</strong>amo <strong>di</strong> <strong>di</strong>mostrare qualcosa <strong>di</strong><br />
più.<br />
Lemma 3.2 (<strong>di</strong> Riemann-Lebesgue) Se f ∈ L 1 (R) si ha lim ˆf(k) = 0. 2<br />
|k|→+∞<br />
Dimostrazione Fissato ǫ > 0, <strong>per</strong> il Teorema A.8 esiste g ∈ C ∞ 0 (R) ta<strong>le</strong> che<br />
‖f −g‖ 1<br />
< ǫ. Usando la (3.5) (e la linearità della trasformazione <strong>di</strong> Fourier)<br />
potremo scrivere<br />
|ˆf(k)| ≤ |ĝ(k)|+|ˆf(k)−ĝ(k)| ≤ |ĝ(k)|+c 1 ‖f −g‖ 1<br />
≤ |ĝ(k)|+c 1 ǫ.<br />
Sia ρ > 0 ta<strong>le</strong> che il supporto <strong>di</strong> g è contenuto in (−ρ,ρ). Utilizzando l’integrazione<br />
<strong>per</strong> parti si ottiene:<br />
∣∫ ρ<br />
∣∫ ρ<br />
∣∣<br />
|ĝ(k)| = c 1 g(x)e −ikx ∣∣<br />
dx∣ = c 1<br />
−ρ<br />
≤ c 1<br />
|k|<br />
∫ +∞<br />
−∞<br />
−ρ<br />
|g ′ (x)|dx ≤ c 1‖g ′ ‖ 1<br />
,<br />
|k|<br />
g ′ (x) e−ikx<br />
ik dx ∣ ∣∣<br />
Per |k| sufficientemente grande quest’ultima quantità potrà essere resa più piccola<br />
<strong>di</strong> ǫ e si avrà <strong>per</strong>ciò |ˆf(k)| ≤ (c 1 +1)ǫ.<br />
□<br />
Proposizione 3.3 Se f ∈ L 1 (R N ) allora ˆf ∈ C(R N ) e lim ˆf(k) = 0.<br />
|k|→+∞<br />
Dimostrazione La continuità segue dal teorema della convergenza dominata<br />
osservando che<br />
ˆf(k)− ˆf(k 0 ) = c N<br />
∫R n f(x) ( e −ik·x −e −ik0·x) dx,<br />
e che, <strong>per</strong> ogni x ∈ R N , si ha lim k→ko f(x) ( e −ik·x −e −ik0·x) = 0 con<br />
|f(x) ( e −ik·x −e −ik0·x) | ≤ 2|f(x)|.<br />
2 Notare l’analogia con il <strong>le</strong>mma <strong>di</strong> Riemann-Lebesgue <strong>per</strong> <strong>le</strong> serie <strong>di</strong> Fourier (Corollario<br />
1.3).
CAPITOLO 3. TRASFORMATE DI FOURIER 45<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
−0.4<br />
−20 −15 −10 −5 0 5 10 15 20<br />
Figura 3.1: Grafico della funzione sincx.<br />
Per N = 1 la proprietà <strong>di</strong> deca<strong>di</strong>mento all’infinito è il <strong>le</strong>mma <strong>di</strong> Riemann-<br />
Lebesgue. Per N ≥ 1, se |k| → ∞, esisterà almeno una <strong>di</strong>rezione j ta<strong>le</strong> che<br />
|k j | → ∞. Per il Teorema <strong>di</strong> Fubini possiamo scrivere<br />
∫<br />
ˆf(k) = c N f(x)e ik·x dx j<br />
}dx 1···dx j ···dx N .<br />
R N−1 {∫ +∞<br />
−∞<br />
Per il <strong>le</strong>mma <strong>di</strong> Riemann-Lebesgue la funzione integranda ∫ +∞<br />
f(x)eik·x<br />
−∞<br />
dx j<br />
tende a 0 e inoltre è limitata dalla funzione integrabi<strong>le</strong> ∫ +∞<br />
−∞ |f(x)|dx j. Dunque<br />
si può applicare il Teorema della convergenza dominata e concludere che ˆf(k)<br />
tende a 0 <strong>per</strong> |k| → ∞.<br />
□<br />
Esempio 3.4 Fissatoα > 0, con un calcolo<strong>di</strong>retto si ottiene che la trasformata<br />
<strong>di</strong> Fourier della funzione<br />
{<br />
1, <strong>per</strong> −α ≤ x ≤ α,<br />
f(x) =<br />
0, altrimenti.<br />
è<br />
ˆf(k) =<br />
dove sincx := sinx<br />
x<br />
(ve<strong>di</strong> Figura 3.1)<br />
√<br />
2 sin(αk)<br />
√ = α√ 2<br />
√ sinc(αk),<br />
π k π<br />
Esercizio 3.5 Dimostrare <strong>le</strong> seguenti proprietà della trasformata <strong>di</strong> Fourier ˆf<br />
<strong>di</strong> f ∈ L 1 (R N ):<br />
1. se f è rea<strong>le</strong>, allora ˆf(k) = ˆf(−k);<br />
2. se f è rea<strong>le</strong> pari allora ˆf è rea<strong>le</strong> pari, e se f è rea<strong>le</strong> <strong>di</strong>spari allora ˆf è<br />
immaginaria <strong>di</strong>spari;
CAPITOLO 3. TRASFORMATE DI FOURIER 46<br />
3. fissato a ∈ R, e posto (T a f)(x) := f(x−a), si ha<br />
̂T a f(k) = e −ik·a ˆf(k). (3.7)<br />
Proposizione 3.6 Sia f ∈ L 1 (R). Se x n f ∈ L 1 (R), allora ˆf è derivabi<strong>le</strong> n<br />
volte e<br />
(<br />
̂x n f = i d ) n<br />
ˆf . (3.8)<br />
dk<br />
Se f ∈ C n (R), con f (m) ∈ L 1 (R) <strong>per</strong> ogni 0 ≤ m ≤ n, allora<br />
<strong>per</strong> ogni 0 ≤ m ≤ n.<br />
̂d m f<br />
dx m = (ik)m ˆf, (3.9)<br />
Dimostrazione Dimostriamo entrambe <strong>le</strong> proposizioni nel caso n = 1, dopo<strong>di</strong>ché<br />
il caso genera<strong>le</strong> segue facilmente <strong>per</strong> induzione su n. Per <strong>di</strong>mostrare<br />
la (3.8) osserviamo che | ∂<br />
∂k f(x)e−ikx | = |−ixf(x)e −ikx | = |xf(x)|, con |xf(x)|<br />
integrabi<strong>le</strong>, e dunque si può derivare sotto il segno <strong>di</strong> integra<strong>le</strong> 3 ottenendo<br />
d<br />
dk<br />
−∞<br />
∫ +∞<br />
−∞<br />
f(x)e −ikx dx = −i<br />
∫ +∞<br />
−∞<br />
xf(x)e −ikx dx,<br />
che ci dà la (3.8) (<strong>per</strong> n = 1).<br />
df<br />
Per <strong>di</strong>mostrare la (3.9) osserviamo che, poiché <strong>per</strong> ipotesi<br />
dx ∈ L1 (R), si può<br />
scrivere ∫ +∞<br />
∫<br />
df<br />
R<br />
df<br />
dx (x)e−ikx dx = lim<br />
R→+∞ −R dx (x)e−ikx dx.<br />
Inoltre poiché, sempre <strong>per</strong> ipotesi, f ∈ C 1 (R), si può integrare <strong>per</strong> parti:<br />
∫ R<br />
−R<br />
df<br />
dx (x)e−ikx dx = f(x)e −ikx ∣ ∣∣<br />
x=R<br />
x=−R +ik ∫ R<br />
−R<br />
f(x)e −ikx dx.<br />
Supponiamo <strong>per</strong> un momento che f(x) abbia limite <strong>per</strong> x → ±∞: poiché f è<br />
integrabi<strong>le</strong> ta<strong>le</strong> limite dev’essere 0 e si ha <strong>per</strong>ciò, passando al limite <strong>per</strong> R → ∞,<br />
∫ +∞<br />
−∞<br />
df<br />
dx (x)e−ikx dx = ik<br />
∫ +∞<br />
−∞<br />
f(x)e −ikx dx,<br />
ovvero la (3.9) (<strong>per</strong> n = 1). Resta quin<strong>di</strong> solo da <strong>di</strong>mostrare che il limite<br />
x → ±∞ <strong>di</strong> f(x) esiste. Ma df<br />
dx<br />
∈ C(R), e dunque si può scrivere<br />
f(x) = f(0)+<br />
∫ x<br />
0<br />
df<br />
dx (x′ )dx ′ .<br />
3 Ricor<strong>di</strong>amo il seguente teorema: se g : R 2 → R, g = g(x,k), è integrabi<strong>le</strong> rispetto a x <strong>per</strong><br />
ogni k, derivabi<strong>le</strong> rispetto a k <strong>per</strong> ogni x e inoltre | ∂ g(x,k)| ≤ γ(x) con γ integrabi<strong>le</strong>, allora<br />
∂k<br />
∫ ∫<br />
d ∂<br />
g(x,k)dx =<br />
dk ∂k g(x,k)dx
CAPITOLO 3. TRASFORMATE DI FOURIER 47<br />
Essendo df<br />
dx ∈ ∫ x L1 (R) si ha che lim x→±∞ 0<br />
lim x→±∞ f(x) esiste.<br />
df<br />
dx (x′ )dx ′ esiste e <strong>per</strong>ciò anche<br />
□<br />
Utilizzando il teorema <strong>di</strong> Fubini si può estendere il precedente risultato al caso<br />
N-<strong>di</strong>mensiona<strong>le</strong>. A questo scopo ricor<strong>di</strong>amo la notazione “multi-in<strong>di</strong>ce”. Un<br />
multi-in<strong>di</strong>ce è una N-upla <strong>di</strong> interi non-negativi α = (α 1 ,α 2 ,...,α N ). L’or<strong>di</strong>ne<br />
del multi-in<strong>di</strong>ce è<br />
|α| := α 1 +α 2 +···+α N .<br />
Se x = (x 1 ,x 2 ,...,x N ) ∈ R N si pone<br />
x α := x α1<br />
1 xα2 2 ···xαN N<br />
e, se f : R N → C ha derivate fino all’or<strong>di</strong>ne |α|, si pone<br />
∇ α ∂ |α| f<br />
f := .<br />
∂x α1<br />
1 ∂xα2 2 ···∂xαN N<br />
Teorema 3.7 Sia f ∈ L 1 (R N ). Se |x| n f(x) ∈ L 1 (R N ), allora ˆf ha derivate<br />
fino all’or<strong>di</strong>ne n e, <strong>per</strong> ogni multi-in<strong>di</strong>ce α con |α| ≤ n, si ha<br />
̂x α f = (i∇) α ˆf . (3.10)<br />
Se f ∈ C n (R N ), e <strong>le</strong> derivate <strong>di</strong> f fino all’or<strong>di</strong>ne n stanno in L 1 (R N ) allora,<br />
<strong>per</strong> ogni multi-in<strong>di</strong>ce α con |α| ≤ n, si ha<br />
̂∇ α f = (ik) α ˆf. (3.11)<br />
Osserviamo dunque che la trasformazione <strong>di</strong> Fourier ha la fondamenta<strong>le</strong> proprietà<br />
<strong>di</strong> trasformare derivazioni in moltiplicazioni <strong>per</strong> polinomi e viceversa. 4 Il<br />
contenuto <strong>di</strong> questi risultati si può riassumere nel<strong>le</strong> semplici rego<strong>le</strong> mnemoniche:<br />
x↦−→i∇<br />
ˆ<br />
∇↦−→ik.<br />
ˆ<br />
A questo punto è opportuno introdurre uno spazio funziona<strong>le</strong> molto importante<br />
<strong>per</strong> la teoria del<strong>le</strong> trasformate <strong>di</strong> Fourier.<br />
Definizione 3.8 Lo spazio <strong>di</strong> Schwartz S(R N ) è lo spazio vettoria<strong>le</strong> del<strong>le</strong> funzioni<br />
f ∈ C ∞ (R N ) tali che, <strong>per</strong> ogni coppia <strong>di</strong> multi-in<strong>di</strong>ci α e β, esiste M αβ ≥ 0<br />
ta<strong>le</strong> che<br />
|x α ∇ β f(x)| ≤ M αβ<br />
<strong>per</strong> ogni x ∈ R N .<br />
Osserviamo che <strong>le</strong> funzioni <strong>di</strong> Schwartz sono funzioni C ∞ tali che esse e tutte<br />
<strong>le</strong> loro derivate decadono all’infinito più rapidamente dell’inverso <strong>di</strong> qualunque<br />
polinomio. Di conseguenza si ha<br />
Osservamo anche che<br />
C ∞ 0 (RN ) ⊂ S(R N ) ⊂ L 1 (R N ).<br />
4 Si noti l’analogia con la proprietà (1.22) dei coefficienti <strong>di</strong> Fourier.
CAPITOLO 3. TRASFORMATE DI FOURIER 48<br />
(i) lo spazio <strong>di</strong> Schwartz è chiuso <strong>per</strong> moltiplicazione tra funzioni; in altre<br />
paro<strong>le</strong>, se f,g ∈ S(R N ) si ha fg ∈ S(R N ).<br />
(ii) lospazio<strong>di</strong>Schwartzèchiuso<strong>per</strong>derivazioniemoltiplicazioni<strong>per</strong>polinomi<br />
ovvero,se f ∈ S(R N ) eαèun qualunque multi-in<strong>di</strong>ce, si ha∇ α f ∈ S(R N )<br />
e x α f ∈ S(R N ).<br />
Sullo spazio <strong>di</strong> Schwartz definiamo una particolare nozione <strong>di</strong> convergenza. 5<br />
Definizione 3.9 Sia {f n } una successione <strong>di</strong> funzioni <strong>di</strong> Schwartz. Diciamo<br />
che f n converge in S(R N ) a f ∈ S(R N ) se <strong>per</strong> ogni coppia <strong>di</strong> multi-in<strong>di</strong>ci α e<br />
β si ha che<br />
lim<br />
n→∞ xα ∇ β f n (x) = x α ∇ β f(x)<br />
uniformemente rispetto a x.<br />
Proposizione 3.10 a) Se f ∈ S(R N ) allora ˆf ∈ S(R N ).<br />
b) La trasformazione <strong>di</strong> Fourier è continua sullo spazio <strong>di</strong> Schwartz, ovvero<br />
se f n → f in S(R N ) (definizione 3.9) allora ˆf n → ˆf in S(R N ).<br />
Dimostrazione a) Osserviamo innanzitutto che <strong>le</strong> ipotesi del Teorema 3.7<br />
sono sod<strong>di</strong>fatte da ogni funzione <strong>di</strong> Schwartz <strong>per</strong> ogni or<strong>di</strong>ne n. Dunque, Se<br />
f ∈ S(R N ) e se α e β sono due multi-in<strong>di</strong>ci qualunque, utilizzando (3.10) e<br />
(3.11) si potrà scrivere<br />
k α ∇ β ˆf = k α [(−ix) β f]̂= (−i) |α|+|β| [∇ α x β f]̂.<br />
Poiché, come sopra osservato, S(R N ) è chiuso sotto l’applicazione <strong>di</strong> ∇ α e x β ,<br />
allora ∇ α x β f è anch’essa una funzione <strong>di</strong> Schwartz e si ha, in particolare, che<br />
∇ α x β f ∈ L 1 (R N ). Dunque<br />
|k α ∇ β ˆf(k)| ≤ cN ‖∇ α x β f‖ 1<br />
=: M αβ<br />
e <strong>per</strong>ciò ˆf ∈ S(R N ).<br />
b) Sia ora f n → f una successione convergente in S(R N ) (definizione 3.9).<br />
Per linearità basterà considerare il caso f = 0. Fissati due multi-in<strong>di</strong>ci α e β,<br />
dobbiamodunque<strong>di</strong>mostrarechek α ∇ β ˆf n (k) → 0uniformemente. Conpassaggi<br />
analoghi ai precedenti si ottiene<br />
e d’altra parte possiamo scrivere<br />
|k α ∇ β ˆfn (k)| ≤ c N ‖∇ α x β f n ‖ 1<br />
∫<br />
‖∇ α x β (|x| 2N +1)|∇ α x β f n (x)|<br />
f n ‖ 1<br />
=<br />
R N |x| 2N dx.<br />
+1<br />
∫<br />
1<br />
≤<br />
R N |x| 2N dx sup |(|x| 2N +1)∇ α x β f n (x)|.<br />
+1 x∈R N<br />
5 Si potrebbe far vedere che questa è la nozione <strong>di</strong> convergenza associata ad una certa<br />
topologia su S(R N ).
CAPITOLO 3. TRASFORMATE DI FOURIER 49<br />
L’integra<strong>le</strong> ∫ 1<br />
R dx è finito e, <strong>per</strong> l’ipotesi <strong>di</strong> convergenza f N |x| 2N +1 n → 0 in<br />
S(R N ), si ha<br />
lim sup |(|x| 2N +1)∇ α x β f n (x)| = 0<br />
n→∞<br />
x∈R N<br />
(<strong>per</strong>ché(|x| 2N +1)∇ α x β f n sipuòovviamentescriverecomesomma<strong>di</strong>unnumero<br />
finito <strong>di</strong> espressioni del tipo x γ ∇ δ f). Pertanto lim n→∞ ‖∇ α x β f n ‖ 1<br />
= 0, il che<br />
<strong>di</strong>mostra che k α ∇ β ˆf n (k) → 0 uniformemente.<br />
□<br />
Esempio 3.11 Calcoliamo la trasformata <strong>di</strong> Fourier della funzione φ(x) =<br />
e −αx2 /2 , con α > 0. Osserviamo che φ è caratterizzata dall’essere l’unica<br />
soluzione del prob<strong>le</strong>ma <strong>di</strong> Cauchy<br />
φ ′ (x)+αxφ(x) = 0, φ(0) = 1.<br />
Utilizzando <strong>le</strong> rego<strong>le</strong> x↦→i ˆ<br />
d<br />
dk , d<br />
dx ↦→ik, ˆ la trasformata ˆφ sod<strong>di</strong>sfa<br />
ˆφ ′ (k)+ 1 α k ˆφ(k) = 0,<br />
con la con<strong>di</strong>zione inizia<strong>le</strong><br />
φ(0) = √ 1 ∫ +∞<br />
2π<br />
−∞<br />
e −αx2 /2 dx = 1 √<br />
2π<br />
√<br />
2<br />
α<br />
∫ +∞<br />
−∞<br />
e −y2 dy = √ 1<br />
√<br />
2 √ 1 π = √α . 2π α<br />
Perciò si ottiene il risultato 6 ˆφ(k) =<br />
1 √α e −k2 /2α . (3.12)<br />
L’estensione della (3.12) al caso N-<strong>di</strong>mensiona<strong>le</strong><br />
φ N (x) = e −α|x|2 /2 , x ∈ R N ,<br />
è una semplice applicazione del teorema <strong>di</strong> Fubini; essendo infatti<br />
N∏<br />
φ N (x)e −ik·x = φ 1 (x j )e −ikjxj ,<br />
j=1<br />
si ottiene<br />
̂φ N (k) =<br />
N∏<br />
j=1<br />
̂φ 1 (k j ) = 1<br />
α N/2 e−|k|2 /2α . (3.13)<br />
Osserviamo che che <strong>per</strong> α = 1 si trova ˆφ = φ, ovvero che la funzione e −|x|2 /2 è<br />
un punto fisso <strong>per</strong> la trasformazione <strong>di</strong> Fourier.<br />
6 In alternativa si poteva anche fare un calcolo <strong>di</strong>retto della trasformata, utilizzando<br />
l’integra<strong>le</strong> notevo<strong>le</strong><br />
∫ +∞ √ π<br />
e −(aξ+bξ2) dξ =<br />
−∞ b ea2 /4b , a,b ∈ C, Re(b) ≥ 0.
CAPITOLO 3. TRASFORMATE DI FOURIER 50<br />
Abbiamo visto alcune proprietà notevoli della trasformazione <strong>di</strong> Fourier, in particolare<br />
quella <strong>di</strong> trasformare derivazioni in moltiplicazioni <strong>per</strong> polinomi, e viceversa.<br />
Ora ve<strong>di</strong>amo un’altra interessante proprietà: quella <strong>di</strong> trasformare<br />
convoluzioni in prodotti e viceversa. La convoluzione f ∗ g <strong>di</strong> due funzioni<br />
f : R N → C e g : R N → C è formalmente definita da<br />
∫ ∫<br />
(f ∗g)(x) := f(x−y)g(y)dy = f(y)g(x−y)dy. (3.14)<br />
R N R N<br />
Proposizione 3.12 Se f,g ∈ L 1 (R N ), allora f ∗g ∈ L 1 (R N ), con ‖f ∗g‖ 1<br />
≤<br />
‖f‖ 1<br />
‖g‖ 1<br />
, e<br />
c N ̂f ∗g = ˆf ĝ. (3.15)<br />
Dimostrazione Cominciamo col <strong>di</strong>mostrare che f ∗g ∈ L 1 (R N ):<br />
∣∫<br />
∣∣∣ ‖f ∗g‖ 1<br />
= f(x−y)g(y)dy<br />
∣<br />
∫R dx<br />
N R N<br />
≤<br />
∫R N ∫<br />
R N |f(x−y)||g(y)|dy = ‖f‖ 1<br />
‖g‖ 1<br />
< +∞.<br />
dove, l’ultima uguaglianza è dovuta al teorema <strong>di</strong> Tonelli (Teorema A.9). Si ha<br />
poi:<br />
∫ ∫<br />
(̂f ∗g)(k) = c N f(x−y)g(y)dy e −ik·x dx<br />
R N R<br />
∫<br />
N<br />
= c N<br />
R N ∫<br />
R N f(x−y)g(y)dy e −ik·(x−y) e −ik·y dx<br />
∫ ∫<br />
∗<br />
= c N f(x−y)e −ik·(x−y) dx g(y)e −ik·y dy = c −1 ˆf(k)ĝ(k). N<br />
R N R N<br />
Osseviamo che l’uguaglianza contrassegnata con l’asterisco è dovuta al teorema<br />
<strong>di</strong> Fubini, essendo la funzione f(x−y)g(y)e −ik·(x−y) e −ik·y sommabi<strong>le</strong> su R 2N<br />
(come sopra <strong>di</strong>mostrato).<br />
□<br />
Il “viceversa” <strong>di</strong> questo risultato lo vedremo un po’ più avanti (proposizione<br />
3.20).<br />
Esercizio 3.13 Dimostrare che l’o<strong>per</strong>azione <strong>di</strong> convoluzione fra funzioni L 1 (R N )<br />
è associativa.<br />
3.2 Teoremi <strong>di</strong> inversione<br />
All’inizio <strong>di</strong> questocapitoloabbiamointrodottoempiricamentela trasformata<strong>di</strong><br />
Fourier come una funzione F(k) che ci <strong>per</strong>mette <strong>di</strong> esprimere una funzione f(x)<br />
me<strong>di</strong>ante la formula (3.3). Dimostreremo ora che la trasformata <strong>di</strong> Fourier ˆf(k)<br />
è effettivamente la funzione che assolve questo compito: <strong>di</strong>mostreremo cioè che<br />
è possibi<strong>le</strong> ricostruire una funzione f(x) “antitrasformando” la sua trasformata<br />
ˆf(k). I teoremi <strong>di</strong> inversione della trasformazione <strong>di</strong> Fourier servono quin<strong>di</strong> a<br />
dare un senso alla formula (3.3), esattamente come i teoremi <strong>di</strong> convergenza
CAPITOLO 3. TRASFORMATE DI FOURIER 51<br />
della serie <strong>di</strong> Fourier servono a dare un senso allo sviluppo (1.1). Analogamente<br />
al caso della serie <strong>di</strong> Fourier, non esiste un solo teorema <strong>di</strong> inversione ma una<br />
molteplicità <strong>di</strong> risultati che <strong>di</strong>pendono dalla regolarità della funzione f. Anche<br />
in questo caso ci limiteremo a presentare solo alcuni dei risultati più importanti.<br />
Lemma 3.14 (Approssimazione dell’identità) Sia ϕ continua e limitata<br />
su R N e sia f σ : R N → R una famiglia <strong>di</strong> funzioni integrabili, <strong>di</strong>pendenti dal<br />
parametro σ > 0, tali che<br />
(1) f σ ≥ 0, <strong>per</strong> ogni σ > 0;<br />
(2) ∫ f<br />
R N σ (x)dx = 1, <strong>per</strong> ogni σ > 0;<br />
∫<br />
(3) lim σ→0 +<br />
|x|>R f σ(x)dx = 0, <strong>per</strong> ogni R > 0.<br />
Allora si ha<br />
∫<br />
lim f σ (x−y)ϕ(y)dy = ϕ(x). (3.16)<br />
σ→0 + R N<br />
Dimostrazione Scriviamo, <strong>per</strong> un generico R > 0,<br />
∫<br />
∫<br />
f σ (x−y)ϕ(y)dy = f σ (y)ϕ(x−y)dy =<br />
R N R N<br />
∫ ∫<br />
∫<br />
f σ (y)ϕ(x)dy+ f σ (y)[ϕ(x−y)−ϕ(x)] dy+ f σ (y)ϕ(x−y)dy<br />
|y|≤R<br />
|y|≤R<br />
|y|>R<br />
Fissatoǫ > 0,<strong>per</strong>lacontinuità<strong>di</strong>ϕinx, esisteR > 0ta<strong>le</strong>che|ϕ(x−y)−ϕ(x)| ≤<br />
ǫ/3 <strong>per</strong> ogni |y| ≤ R e <strong>per</strong>ciò, con questa scelta <strong>di</strong> R, si ha<br />
∫<br />
∣ f σ (y)[ϕ(x−y)−ϕ(x)] dy∣ ≤ ǫ 3<br />
|y|≤R<br />
dove si è sfruttata anche la proprietà (2). Poiché inoltre ϕ è limitata, grazie alla<br />
proprietà (3) esisterà σ 1 ta<strong>le</strong> che<br />
∫<br />
∣ f σ (y)ϕ(x−y)dy∣ ≤ ǫ 3 , <strong>per</strong> ogni 0 < σ < σ 1.<br />
|y|>R<br />
Infine, <strong>per</strong> <strong>le</strong> proprietà (2) e (3), esisterà σ 2 < σ 1 ta<strong>le</strong> che<br />
∫<br />
∫<br />
∣<br />
∣1− f σ (y)dy∣ = ∣ f σ (y)dy∣ ≤ ǫ 3 , <strong>per</strong> ogni 0 < σ < σ 2.<br />
|y|≤R<br />
|y|>R<br />
Si ha dunque che, <strong>per</strong> ogni fissato ǫ > 0 esiste σ sufficientemente piccolo ta<strong>le</strong><br />
che ∣∫<br />
∫<br />
∣∣ ∣<br />
f σ (x−y)ϕ(y)dy −ϕ(x) ∣ ≤ |ϕ(x)| ∣1− f σ (y)dy∣<br />
R N |y|≤R<br />
∫<br />
∫<br />
∣<br />
+ ∣ f σ (y)[ϕ(x−y)−ϕ(x)] dy∣+<br />
∣ f σ (y)ϕ(x−y)dy∣ < ǫ,<br />
|y|≤R<br />
il che <strong>di</strong>mostra il limite (3.16).<br />
|y|>R<br />
Una famiglia <strong>di</strong> funzioni con <strong>le</strong> proprietà (1), (2) e (3) del <strong>le</strong>mma precedente è<br />
detta approssimazione dell’identità.<br />
□
CAPITOLO 3. TRASFORMATE DI FOURIER 52<br />
Lemma 3.15 La famiglia <strong>di</strong> curve gaussiane<br />
g σ (x) :=<br />
è un’approssimazione dell’identità.<br />
1<br />
(2πσ 2 ) N/2 e−|x|2 /2σ 2 , σ > 0. (3.17)<br />
Dimostrazione La proprietà (1) è evidente. Utilizzando il teorema <strong>di</strong> Fubini<br />
e l’integra<strong>le</strong> notevo<strong>le</strong> ∫ +∞<br />
−∞ e−ξ2 dξ = √ π si ottiene<br />
∫<br />
R N e −|x|2 /2σ 2 dx =<br />
N∏<br />
i=1<br />
∫ +∞<br />
−∞<br />
e −x2 i /2σ2 dx i =<br />
N∏ √ +∞<br />
2σ 2∫<br />
e −ξ2 dξ = (2πσ 2 ) N/2<br />
e <strong>per</strong>ciò ∫ +∞<br />
−∞ g σ(x)dξ = 1 (proprietà (2)). Infine, <strong>per</strong> <strong>di</strong>mostrare la proprietà<br />
(3) basta osservare che, <strong>per</strong> ogni fissato R > 0, si ha<br />
∫<br />
1<br />
g σ (x)dx = e −|z|2 /2 dz,<br />
|x|>R<br />
i=1<br />
(2π) N/2 ∫|z|>R/σ<br />
−∞<br />
che chiaramente tende a 0 <strong>per</strong> σ → 0 + .<br />
□<br />
Possiamo ora <strong>di</strong>mostrare il primo teorema <strong>di</strong> inversione, che riguarda <strong>le</strong> funzioni<br />
<strong>di</strong> Schwartz. Ricor<strong>di</strong>amo che se f ∈ S(R N ) allora ˆf ∈ S(R N ).<br />
Teorema 3.16 Se f ∈ S(R N ) si ha<br />
f(x) = c N<br />
∫R N ˆf(k)e ik·x dk (3.18)<br />
<strong>per</strong> ogni x ∈ R N .<br />
Dimostrazione Per ogni x ∈ R n e <strong>per</strong> ogni α > 0, la funzione<br />
(k,y) ↦→ c 2 N ei(x−y)·k f(y)e −α2 |k| 2 /2<br />
è integrabi<strong>le</strong> su R 2N e <strong>per</strong>ciò possiamo applicare il teorema <strong>di</strong> Fubini ed eseguire<br />
l’integra<strong>le</strong> su R 2N <strong>di</strong> ta<strong>le</strong> funzione in due mo<strong>di</strong>: rispetto a y e poi rispetto a k<br />
e viceversa. Si ottiene così l’uguaglianza<br />
∫<br />
∫<br />
c N<br />
ˆf(k)e ik·x e −α2 |k| 2 /2 dk = c [e ̂ ]<br />
N −α2 |k| 2 /2<br />
(y −x)f(y)dy.<br />
R N<br />
Come abbiamo visto nell’esempio 3.11, la trasformata <strong>di</strong> e −α2 |k| 2 è data da<br />
R N<br />
e quin<strong>di</strong><br />
[<br />
e<br />
−α ̂ ] 2 |k| 2 /2<br />
(x) = 1 /2α 2<br />
α N e−|x|2 = c −1<br />
N g α(x)<br />
∫<br />
c N<br />
ˆf(k)e<br />
∫R ik·x e −α2 |k| 2 /2 dk = g α (x−y)f(y)dy.<br />
N R N
CAPITOLO 3. TRASFORMATE DI FOURIER 53<br />
Passando al limite <strong>per</strong> α → 0 + (con il teorema della convergenza dominata) e<br />
utilizzando i due <strong>le</strong>mmi precedenti si ottiene<br />
c N<br />
∫R N ˆf(k)e ik·x dk = f(x).<br />
Introduciamo la notazione F : S(R N ) → S(R N ), F : f ↦→ ˆf <strong>per</strong> in<strong>di</strong>care la<br />
trasformazione <strong>di</strong> Fourier sullo spazio <strong>di</strong> Schwartz. Posto<br />
(F ∗ f)(x) := c N<br />
∫R N f(k)e ik·x dk (3.19)<br />
il teorema precedente ci <strong>di</strong>ce che F ∗ F = I. Inoltre, posto<br />
(Jf)(x) := f(−x) (3.20)<br />
e osservato che F e F ∗ sono <strong>le</strong>gate dalla semplice relazione<br />
si ha anche<br />
F ∗ = FJ = JF , (3.21)<br />
FF ∗ = F J F = F ∗ F<br />
e quin<strong>di</strong> FF ∗ = I. Pertanto F è una corrispondenza biunivoca <strong>di</strong> S(R N ) in sé<br />
e F ∗ è la sua inversa:<br />
F ∗ = F −1 . (3.22)<br />
La trasformazione F ∗ prende il nome <strong>di</strong> trasformazione <strong>di</strong> Fourier inversa e la<br />
funzione F ∗ f è detta antitrasformata <strong>di</strong> f.<br />
Esercizio 3.17 Verificare che<br />
F 2 = J, F 3 = F ∗ , F 4 = I (3.23)<br />
(analogamente al ciclo dell’unità immaginaria: i 2 = −1, i 3 = −i, i 4 = 1).<br />
Enunciamo ora, senza <strong>di</strong>mostrazione, due ulteriori teoremi <strong>di</strong> inversione. Il primo<br />
ci <strong>di</strong>ce che la (3.18) va<strong>le</strong> (quasi ovunque) anche <strong>per</strong> funzioni L 1 , nell’ipotesi<br />
che anche ˆf sia una funzione L 1 .<br />
Teorema 3.18 Se f e ˆf stanno entrambe in L 1 (R N ) allora va<strong>le</strong> la (3.18) <strong>per</strong><br />
quasi ogni x ∈ R N .<br />
Corollario 3.19 Se f ∈ L 1 (R N ) e ˆf ∈ S(R N ), allora f ∈ S(R N ) (nel senso<br />
che f è ugua<strong>le</strong> quasi ovunque a una funzione <strong>di</strong> Schwartz).<br />
Dimostrazione Poiché ˆf ∈ S(R N ), si ha F ∗ ˆf ∈ S(R N ). Ma <strong>per</strong> il Teorema<br />
3.18 si ha che F ∗ ˆf = f quasi ovunque. □<br />
Come prima applicazione <strong>di</strong> questi risultati <strong>di</strong>mostriamo un altro teorema sul<strong>le</strong><br />
convoluzioni, che è un il viceversa della Proposizione 3.12, almeno <strong>per</strong> funzioni<br />
<strong>di</strong> Schwartz.<br />
□
CAPITOLO 3. TRASFORMATE DI FOURIER 54<br />
Proposizione 3.20 Se f, g ∈ S(R N ), allora f ∗g ∈ S(R N ) e<br />
̂fg = c N ˆf ∗ĝ. (3.24)<br />
Dimostrazione Dalla Proposizione 3.12 otteniamo che ̂f ∗g = c −1<br />
N ˆf ĝ ∈<br />
S(R N ), e dunque f ∗ g ∈ S(R N ) <strong>per</strong> il corollario precedente. Inoltre, poiché<br />
(come si può facilmente verificare) la (3.15) va<strong>le</strong> anche <strong>per</strong> <strong>le</strong> antitrasformate,<br />
c N F ∗ (f ∗g) = F ∗ f F ∗ g,<br />
riscrivendoquesta identità <strong>per</strong> ˆf e ĝ al posto <strong>di</strong> f e g si ottiene c N F ∗ (ˆf∗ĝ) = fg<br />
e da questa, applicando F ad ambo i membri, si ottiene la (3.24). □<br />
Un altro teorema <strong>di</strong> inversione che enunciamo senza <strong>di</strong>mostrazione è l’analogo<br />
del teorema <strong>di</strong> convergenza puntua<strong>le</strong> 1.4 visto <strong>per</strong> <strong>le</strong> serie <strong>di</strong> Fourier (anche la<br />
<strong>di</strong>mostrazione è simi<strong>le</strong>) e va<strong>le</strong> solo nel caso uni<strong>di</strong>mensiona<strong>le</strong>.<br />
Teorema 3.21 Se f appartiene a L 1 (R) ed è regolare a tratti 7 allora esiste il<br />
limite ∫ +R ∫ +∞<br />
lim ˆf(k)e ikx dk =: v.p. ˆf(k)e ikx dk (3.25)<br />
R→+∞ −R<br />
−∞<br />
(detto “valore principa<strong>le</strong>” dell’integra<strong>le</strong>) e si ha<br />
∫<br />
1 +∞<br />
√ v.p. ˆf(k)e ikx dk = f+ (x)+f − (x)<br />
2π −∞<br />
2<br />
(3.26)<br />
<strong>per</strong> ogni x ∈ R (dove f + (x) e f − (x) in<strong>di</strong>cano i limiti destro e sinistro <strong>di</strong> f nel<br />
punto x).<br />
Osserviamo che se ˆf ∈ L 1 (R) allora v.p. ∫ +∞<br />
−∞ ˆf(k)e ikx dk = ∫ +∞<br />
−∞ ˆf(k)e ikx dk.<br />
Osservazione 3.22 Riscriviamo la fomula <strong>di</strong> inversione (3.18) esplicitamente<br />
f(x) = 1 ∫ ∫<br />
(2π) N e ik·x f(y)e −ik·y dydk.<br />
R N R N<br />
Notiamo che non si può applicare il teorema <strong>di</strong> Fubini: questo non è l’integra<strong>le</strong><br />
su R 2N della funzione f(k)e −ik·y e ik·x (<strong>per</strong>ché questa non è sommabi<strong>le</strong>) e<br />
quin<strong>di</strong> gli integrali vanno fatti nell’or<strong>di</strong>ne in<strong>di</strong>cato. Tuttavia, se potessimo applicare<br />
il teorema <strong>di</strong> Fubini invertendo l’or<strong>di</strong>ne del<strong>le</strong> integrazioni si otterrebbe<br />
l’espressione:<br />
f(x) = 1 ∫ ∫<br />
(2π) N e ik·(x−y) dkf(y)dy<br />
R N R N<br />
da cui si vede che la “funzione”<br />
δ(x) = 1<br />
(2π) N ∫<br />
R N e ik·x dk<br />
7 Ve<strong>di</strong> nota a pag. 5. Attenzione: qui non si richiede la continuità <strong>di</strong> f.
CAPITOLO 3. TRASFORMATE DI FOURIER 55<br />
ha la proprietà <strong>di</strong> una “delta <strong>di</strong> Dirac”, ovvero la sua convoluzione con una<br />
funzione riproduce la funzione stessa:<br />
∫<br />
R N δ(x−y)f(y)dy = f(x).<br />
Queste considerazionisarannoinquadratecorrettamentenell’ambito della teoria<br />
del<strong>le</strong> <strong>di</strong>stribuzioni che vedremo nel prossimo capitolo.<br />
3.3 Trasformata <strong>di</strong> Fourier <strong>di</strong> funzioni L 2<br />
Anche nella teoria del<strong>le</strong> trasformate <strong>di</strong> Fourier, come in quella del<strong>le</strong> serie, lo<br />
spazio L 2 è il vero protagonista. Il motivo risulta chiaro dal risultato seguente<br />
che è, <strong>per</strong> <strong>le</strong> trasformate, l’analogo del teorema <strong>di</strong> Parseval (eq. (1.16)) <strong>per</strong> <strong>le</strong><br />
serie.<br />
Lemma 3.23 Se f,g ∈ S(R N ), allora 〈f,g〉 = 〈ˆf,ĝ〉. In particolare, ‖f‖ 2<br />
=<br />
‖ˆf‖ 2<br />
.<br />
Dimostrazione Il <strong>le</strong>mmaèunasempliceconseguenzadel teorema<strong>di</strong>inversione<br />
3.16 e del teorema <strong>di</strong> Fubini. Si ha infatti:<br />
∫<br />
〈f,g〉 = f(x)g(x)dx = c N<br />
ˆf(k)e<br />
∫R<br />
∫R ik·x dkg(x)dx<br />
N N R<br />
∫ ∫ ∫<br />
N<br />
= c N<br />
ˆf(k) g(x)e ik·x dx dk = ˆf(k)ĝ(x)dx = 〈ˆf,ĝ〉<br />
R N R N R N<br />
Questo semplice ma importante risultato ci <strong>per</strong>mette <strong>di</strong> estendere la trasformazione<br />
<strong>di</strong> Fourier a tutte <strong>le</strong> funzioni L 2 .<br />
Teorema 3.24 La trasformazione <strong>di</strong> Fourier F : S(R N ) → S(R N ), f ↦→ ˆf, si<br />
estende in modo unico ad una isometria <strong>di</strong> L 2 (R N ) in sé.<br />
Dimostrazione Sia f ∈ L 2 (R N ). Allora, poiché S(R N ) è denso in L 2 (R N ),<br />
esiste una successione <strong>di</strong> funzioni f n ∈ S(R N ) ta<strong>le</strong> che f n → f nello spazio<br />
L 2 (R N ). Poiché la successione f n è convergente, allora sarà anche <strong>di</strong> Cauchy<br />
in L 2 (R N ), cioè <strong>per</strong> ogni ǫ > 0 esisterà n ǫ ta<strong>le</strong> che ‖f n −f m ‖ 2<br />
< ǫ <strong>per</strong> ogni<br />
n,m ≥ n ǫ . Ma <strong>per</strong> il teorema precedente si ha<br />
‖f n −f m ‖ 2<br />
= ‖ˆf n − ˆf m ‖ 2<br />
e quin<strong>di</strong> anche ˆf n è una successione <strong>di</strong> Cauchy in L 2 (R N ). Poiché lo spazio<br />
L 2 (R N ) è comp<strong>le</strong>to, esisterà un e<strong>le</strong>mento <strong>di</strong> L 2 (R N ), che chiameremo Ff, ta<strong>le</strong><br />
che<br />
lim<br />
n→+∞ ‖ˆf n −Ff‖ 2<br />
= 0.<br />
Dunque, ad ogni f ∈ L 2 (R N ) possiamo associare, con il proce<strong>di</strong>mento al limite<br />
appena descritto, un e<strong>le</strong>mento Ff ∈ L 2 (R N ): ta<strong>le</strong> e<strong>le</strong>mento sarà, <strong>per</strong> definizione,<br />
la trasformata <strong>di</strong> Fourier <strong>di</strong> f e l’applicazione F : L 2 (R N ) → L 2 (R N ),<br />
f ↦→ Ff, sarà detta trasformazione <strong>di</strong> Fourier. Si può verificare facilmente che:<br />
□
CAPITOLO 3. TRASFORMATE DI FOURIER 56<br />
• la definizione <strong>di</strong> Ff non <strong>di</strong>pende dalla successione approssimante scelta;<br />
• F è lineare;<br />
• F è un’isometria, ovvero 〈f,g〉 = 〈Ff,Fg〉 <strong>per</strong> ogni f,g ∈ L 2 (R N ) (Teorema<br />
<strong>di</strong> Plancherel);<br />
• F è invertibi<strong>le</strong>; 8<br />
• se F ′ : L 2 (R N ) → L 2 (R N ) è una trasformazionelineare e continua ta<strong>le</strong> che<br />
F ′ |S(R N ) = F |S(R N ), allora F ′ = F (in questo senso l’estensione è unica).<br />
Il seguente teorema assicura la consistenza della precedente definizione con la<br />
definizione (3.4) nel caso <strong>di</strong> funzioni che sono L 2 e anche L 1 . Ove sia possibi<strong>le</strong><br />
applicare entrambe <strong>le</strong> definizioni, denotiamo con Ff la trasformata <strong>di</strong> Fourier<br />
in L 2 definita dal precedente teorema e con ˆf la trasformata <strong>di</strong> Fourier in senso<br />
L 1 , ovvero definita dall’integra<strong>le</strong> (3.4).<br />
Lemma 3.25 Se f ∈ L 2 (R N ) ha supporto compatto, allora (Ff)(k) = ˆf(k)<br />
<strong>per</strong> q.o. k ∈ R N .<br />
Dimostrazione Sia Ω un a<strong>per</strong>to limitato contenente il supporto <strong>di</strong> f e sia g n<br />
una successione <strong>di</strong> funzioni in C0 ∞ (Ω) che approssimano f in L 2 (Ω) (e quin<strong>di</strong><br />
anche in L 2 (R N )). Allora, ricordando l’osservazione A.6, f ∈ L 1 (Ω) e g n → f<br />
in senso L 1 , il che implica (<strong>per</strong> la (3.5)) che ĝ n (x) → ˆf(k) uniformemente in Ω.<br />
Dunque, essendo Ω limitato, ĝ n → ˆf in L 2 . Ma, <strong>per</strong> definizione, ĝ n → Ff in<br />
L 2 e quin<strong>di</strong> Ff = ˆf quasi ovunque.<br />
□<br />
□<br />
Teorema 3.26 Se f ∈ L 2 ∩L 1 (R N ), allora (Ff)(k) = ˆf(k) <strong>per</strong> q.o. k ∈ R N .<br />
Dimostrazione Per ogni R > 0 sia<br />
{<br />
f(x), se |x| ≤ R,<br />
f R (x) =<br />
0, se |x| > R.<br />
Per il precedente Lemma si ha ˆf R = Ff R q.o. in R N . Dal teorema della convergenza<br />
dominata segue che, <strong>per</strong> R → ∞, f R converge a f sia in norma L 1 che<br />
in norma L 2 . Di conseguenza:<br />
(i) <strong>per</strong> la (3.5) si ha che ˆf R (k) → ˆf(k) uniformemente;<br />
(ii) <strong>per</strong>il <strong>le</strong>mma precedentee<strong>per</strong>la continuità<strong>di</strong> F siha che ˆf R = Ff R → Ff<br />
in senso L 2 .<br />
8 Si può dedurre da linearità e isometricità, il che è faci<strong>le</strong> a <strong>di</strong>mensione finita ma richiede un<br />
po’ più <strong>di</strong> lavoro in <strong>di</strong>mensione infinita. Altrimenti basta estendere F ∗ da S(R N ) a L 2 (R N ),<br />
con la stessa procedura, dopo<strong>di</strong>ché è faci<strong>le</strong> mostrare che F ∗ è l’inversa <strong>di</strong> F.
CAPITOLO 3. TRASFORMATE DI FOURIER 57<br />
Si può <strong>di</strong>mostrare (si veda [9] Teorema 3.12) che allora esiste una sottosuccessione<br />
ˆf Rn che converge a Ff puntualmente quasi ovunque. Ma, <strong>per</strong> il punto<br />
(i), ogni sottosuccessione <strong>di</strong> ˆfR converge puntualmente a ˆf e dunque possiamo<br />
concludere che Ff = ˆf quasi ovunque.<br />
□<br />
Notiamo che come altra conseguenza del Lemma 3.25 va<strong>le</strong> il seguente risultato.<br />
Corollario 3.27 Se f ∈ L 2 (R N ) si ha<br />
∫<br />
(Ff)(k) = lim<br />
R→∞<br />
|x|≤R<br />
dove il limite è da intendrsi nella norma L 2 .<br />
e −ik·x f(x)dx, (3.27)<br />
Dimostrazione Per il Lemma 3.25 si ha ˆf R = Ff R e, <strong>per</strong> la continuità <strong>di</strong> F,<br />
si ha ˆf R → Ff in L 2 (R N ) <strong>per</strong> R → ∞. Scrivendo esplicitamente questo limite<br />
si ottiene la (3.27).<br />
□<br />
Una volta visto che <strong>le</strong> trasformate in senso L 1 e in senso L 2 coincidono <strong>per</strong><br />
funzioni che stannoin entranbigli spazi, si usaadottarelanotazione ˆf anche<strong>per</strong><br />
funzioni L 2 , tenendo <strong>per</strong>ò presente che <strong>per</strong> tali funzioni, in genera<strong>le</strong>, l’integra<strong>le</strong><br />
(3.4) non ha senso (mentre ha senso il limite (3.27)).<br />
Esempio 3.28 La trasformata della funzione<br />
{<br />
1, <strong>per</strong> −1 ≤ x ≤ 1,<br />
rect(x) :=<br />
0, altrimenti.<br />
√ √<br />
2<br />
è<br />
π sinc(k) = 2 sink<br />
π k<br />
(ve<strong>di</strong> Esempio 3.4). Questo è un esempio <strong>di</strong> funzione<br />
L 1 (R) la cui trasformata non sta in L 1 (R) poiché, infatti, si ha<br />
∫ +∞<br />
sink<br />
∣ k ∣dk = +∞.<br />
−∞<br />
Naturalmente, essendo rect ∈ L 2 (R), la sua trasformata deve stare in L 2 (R), e<br />
infatti risulta ∫ +∞<br />
sink<br />
2<br />
∣<br />
−∞ k ∣ dk < +∞.<br />
Questosignificacheallafunzionesinc nonpuòessereapplicatalatrasformazione<br />
(o l’anti-trasformazione) <strong>di</strong> Fourier in senso L 1 mentre può essere applicata<br />
quella in senso L 2 . Chiaramente, essendo la trasformazione biunivoca su L 2 (R),<br />
risulterà F ∗ (sinc) = √ π<br />
2<br />
rect e ta<strong>le</strong> formula va interpretata come<br />
lim<br />
R→∞<br />
∫ R<br />
−R<br />
ikx sink<br />
e dk = πrect(x), (3.28)<br />
k<br />
dove il limite è inteso in L 2 (R) (Corollario 3.27). Per <strong>di</strong> più, essendo rect ∈<br />
L 1 (R) e regolare a tratti, possiamo applicare il Teorema 3.21 e concludere che<br />
il limite (3.28) può essere inteso anche in senso puntua<strong>le</strong>, almeno nei punti in<br />
cui rect è continua. In particolare, <strong>per</strong> x = 0 si otterrà il limite notevo<strong>le</strong><br />
lim<br />
R→∞<br />
∫ R<br />
−R<br />
sink<br />
k<br />
dk = π. (3.29)
CAPITOLO 3. TRASFORMATE DI FOURIER 58<br />
3.4 Soluzione <strong>di</strong> equazioni al<strong>le</strong> derivate parziali<br />
Ve<strong>di</strong>amo ora alcuni esempi <strong>di</strong> utilizzo del<strong>le</strong> trasformate <strong>di</strong> Fourier <strong>per</strong> risolvere<br />
equazioni al<strong>le</strong> derivate parziali. Poiché la trasformazione <strong>di</strong> Fourier agisce su<br />
funzionidefinitesuR N , sinoteràcheilmetodoèadattoaprob<strong>le</strong>miilcuidominio<br />
spazia<strong>le</strong> è l’intero R N .<br />
3.4.1 Equazioni del trasporto e dal calore<br />
Consideriamo il prob<strong>le</strong>ma ai valori iniziali <strong>per</strong> l’equazione del trasporto<br />
{<br />
ut (x,t)+v ·∇u(x,t) = 0, x ∈ R, t > 0,<br />
u(x,0) = ϕ(x), x ∈ R,<br />
(3.30)<br />
dove v ∈ R N è un vettore fissato e ϕ è un dato inizia<strong>le</strong> fissato. Sia û(k,t)<br />
la trasformata <strong>di</strong> u(x,t) rispetto a x. Il corrispondente prob<strong>le</strong>ma <strong>per</strong> û è il<br />
seguente: {ût (k,t)+iv ·kû(k,t) = 0, k ∈ R, t > 0,<br />
û(k,0) = ˆϕ(k), k ∈ R,<br />
e dunque (ricordando la proprietà (3.7))<br />
û(k,t) = e −itv·kˆϕ(k) = ̂T tv ϕ(k).<br />
Antitrasformando, si trova <strong>per</strong>ciò<br />
u(x,t) = ϕ(x−vt). (3.31)<br />
Consideriamo ora il prob<strong>le</strong>ma ai valori iniziali <strong>per</strong> l’equazione del calore<br />
{<br />
ut (x,t) = c∆u(x,t), x ∈ R N , t > 0,<br />
u(x,0) = ϕ(x), x ∈ R N ,<br />
(3.32)<br />
dove c > 0 è una costante fissata e ϕ è un dato inizia<strong>le</strong> fissato. Come sopra, sia<br />
û(k,t) la trasformata <strong>di</strong> u(x,t) rispetto a x; <strong>per</strong> û il prob<strong>le</strong>ma <strong>di</strong>venta<br />
{ût (k,t) = −c|k| 2 û(k,t), k ∈ R, t > 0,<br />
e dunque<br />
û(k,0) = ˆϕ(k), k ∈ R,<br />
û(k,t) = e −ct|k|2 ˆϕ(k).<br />
Per antitrasformare occorre ricordare la (3.24) (che va<strong>le</strong> anche <strong>per</strong> l’antitrasformata),<br />
<strong>per</strong> cui si ha (con qualche abuso <strong>di</strong> notazione)<br />
)<br />
u(x,t) = c N<br />
((F ∗ e −ct|k|2 )∗ϕ (x)<br />
L’antitrasformata F ∗ e −ct|k|2 <strong>di</strong> e −ct|k|2 si calcola facilmente usando la (3.13)<br />
(con α = 2ct) e F ∗ = JF:<br />
F ∗ e −ct|k|2 = JFe −ct|k|2 =<br />
1<br />
(2ct) N/2e−|x|2 /4ct .
CAPITOLO 3. TRASFORMATE DI FOURIER 59<br />
Dunque<br />
che scriviamo<br />
u(x,t) =<br />
=<br />
∫<br />
c N<br />
(2ct) N/2<br />
∫<br />
1<br />
(4πct) N/2<br />
dove (ricordando anche la definizione (3.17))<br />
R N e −|x−y|2 /4ct ϕ(y)dy<br />
R N e −|x−y|2 /4ct ϕ(y)dy<br />
∫<br />
u(x,t) = Γ(x−y,t)ϕ(y)dy, (3.33)<br />
R N<br />
Γ(x,t) =<br />
1 /4ct<br />
(4πct) N/2 e−|x|2 = g √ 2ct<br />
(x) (3.34)<br />
è detta soluzione fondamenta<strong>le</strong> dell’equazione del calore.<br />
3.4.2 Equazione del<strong>le</strong> onde<br />
Consideriamo il prob<strong>le</strong>ma ai valori iniziali <strong>per</strong> l’equazione del<strong>le</strong> onde<br />
⎧<br />
⎪⎨<br />
u tt (x,t) = c 2 ∆u(x,t), x ∈ R, t > 0,<br />
u(x,0) = ϕ(x), x ∈ R,<br />
⎪⎩<br />
u t (x,0) = ψ(x), x ∈ R<br />
(3.35)<br />
dove c > 0 è una costante fissata e ϕ , ψ sono i dati iniziali. Procedendo come<br />
negli esempi precedenti otteniamo il prob<strong>le</strong>ma <strong>per</strong> û(k,t)<br />
⎧<br />
û ⎪⎨ tt (k,t) = −c 2 |k| 2 û(k,t), k ∈ R, t > 0,<br />
û(k,0) = ˆϕ(k), k ∈ R,<br />
⎪⎩<br />
û t (k,0) = ˆψ(k), k ∈ R.<br />
La soluzione generica dell’equazione <strong>di</strong>fferenzia<strong>le</strong> è<br />
û(k,t) = A(k)e ic|k|t +B(k)e −ic|k|t . (3.36)<br />
Imponendo <strong>le</strong> con<strong>di</strong>zioni iniziali si ottiene<br />
⎧ (<br />
⎧<br />
⎪⎨ A(k)+B(k) = ˆϕ(k), A(k) = ⎪⎨<br />
1 ˆϕ(k)+ ˆψ(k)<br />
)<br />
,<br />
2 ic|k|<br />
⎪⎩ A(k)−B(k) = ˆψ(k)<br />
ic|k| , =⇒ (<br />
⎪⎩ B(k) = 1 ˆϕ(k)− ˆψ(k)<br />
)<br />
,<br />
2 ic|k|<br />
e dunque<br />
û(k,t) = ˆϕ(k) eic|k|t +e −ic|k|t<br />
2<br />
= ˆϕ(k) cos(c|k|t)+<br />
+ ˆψ(k) eic|k|t −e −ic|k|t<br />
2ic|k|<br />
sin(c|k|t) ˆψ(k) .<br />
c|k|<br />
(3.37)
CAPITOLO 3. TRASFORMATE DI FOURIER 60<br />
Adesso, <strong>per</strong> trovare la soluzione u(x,t), dovremmo applicare la trasformazione<br />
<strong>di</strong> Fourier inversa a quest’ultima espressione, il che implicherebbe antitrasformare<br />
<strong>le</strong> funzioni cos(c|k|t) e sin(c|k|t)<br />
|k|<br />
, che non sono né <strong>di</strong> classe L 1 né <strong>di</strong> classe<br />
L 2 . Ci troviamo <strong>per</strong>ciò in una <strong>di</strong>fficoltà che si potrà su<strong>per</strong>are solo con un’opportuna<br />
estensione del concetto <strong>di</strong> trasformazione <strong>di</strong> Fourier, estensione <strong>di</strong> cui<br />
ci occu<strong>per</strong>emo nel capitolo successivo (in particolare riprenderemo l’equazione<br />
del<strong>le</strong> onde nel paragrafo 4.5). Tuttavia, a <strong>di</strong>mensione N = 1 riusciamo ad eseguire<br />
l’antitrasformazione fin d’ora. Infatti, in questo caso, |k| è semplicemente<br />
il valore assoluto della variabi<strong>le</strong> scalare k e la (3.37) si puó riscrivere<br />
ovvero, ricordando la (3.7),<br />
û(k,t) = ˆϕ(k) eickt +e −ickt<br />
+<br />
2<br />
ˆψ(k) eickt −e −ickt<br />
2ick<br />
û(k,t) = 1 2<br />
= ˆϕ(k) eickt +e −ickt<br />
2<br />
+ ˆψ(k) 1 2<br />
[̂T −ct ϕ(k)+ ̂T +ct ϕ(k)]<br />
+ 1 2<br />
∫ t<br />
∫ t<br />
−t<br />
−t<br />
e icks ds<br />
̂T −cs ψ(k)ds.<br />
Pertanto otteniamo la soluzione dell’equazione del<strong>le</strong> onde uni<strong>di</strong>mensiona<strong>le</strong><br />
u(x,t) = 1 2 [ϕ(x+ct)+ϕ(x−ct)]+ 1 2<br />
nota come formula <strong>di</strong> D’A<strong>le</strong>mbert.<br />
= 1 2 [ϕ(x+ct)+ϕ(x−ct)]+ 1 2c<br />
∫ t<br />
ψ(x+cs)ds<br />
−t<br />
∫ x+ct<br />
x−ct<br />
ψ(y)dy,<br />
(3.38)<br />
Tornando ora al caso N-<strong>di</strong>mensiona<strong>le</strong>, analogamente a quanto fatto nel paragrafo<br />
1.2 <strong>per</strong> la corda vibrante <strong>di</strong> lunghezza finita, stu<strong>di</strong>amo l’energia 9 associata<br />
al sistema (3.35)<br />
E(t) = 1 (<br />
u<br />
2<br />
∫R 2 t(x,t)+c 2 |∇u(x,t)| 2) dx. (3.39)<br />
N<br />
Applicando il Teorema <strong>di</strong> Plancherel ‖f‖ 2<br />
= ‖ˆf‖ 2<br />
e la formula (3.37) possiamo<br />
scrivere ∫<br />
R N (<br />
|û 2 t (k,t)|+c2 |k| 2 |û(k,t)| 2) dk<br />
∫ ∣ ∣∣∣<br />
= |ck| 2 −ˆϕ(k) sin(c|k|t)+<br />
R N<br />
∫ ∣<br />
+ |ck|<br />
∣∣∣ˆϕ(k) 2 cos(c|k|t)+<br />
R N<br />
=<br />
ˆψ(k)<br />
cos(c|k|t)<br />
c|k|<br />
ˆψ(k)<br />
sin(c|k|t)<br />
c|k|<br />
2<br />
∣ dk<br />
2<br />
∣ dk<br />
|ck|<br />
(|ˆϕ(k)|<br />
∫R 2 2 + |ˆψ(k)| 2 )<br />
(<br />
N |ck| 2 dk = |ck|<br />
∫R 2 |ˆϕ(k)| 2 +|ˆψ(k)| 2) dk.<br />
N<br />
9 Per la precisione, E(t) definita in (3.39) è una quantità proporziona<strong>le</strong> all’energia.
CAPITOLO 3. TRASFORMATE DI FOURIER 61<br />
Dunque, come nel caso della corda vibrante finita, si ha E(t) = E(0) =: E,<br />
ovvero l’energia rimane costante nel tempo, e si ha<br />
E = 1 2<br />
∫R N (<br />
|ck| 2 |ˆϕ(k)| 2 +|ˆψ(k)| 2) dk (3.40)<br />
che è l’analogo dell’espressione (1.39) ottenuta <strong>per</strong> la corda vibrante finita.<br />
Un’altra rappresentazione dell’energia la otteniamo dalla forma (3.36) della soluzione<br />
trasformata. Poiché u è rea<strong>le</strong>, si deve avere û(k,t) = û(−k,t), da cui<br />
segue<br />
A(k)e −ic|k|t +B(k)e ic|k|t = A(−k)e ic|k|t +B(−k)e −ic|k|t<br />
(<strong>per</strong> ogni t ∈ R), il che implica<br />
A(k) = B(−k).<br />
Dunque, poiché<br />
{<br />
ˆϕ = A+B,<br />
ˆψ = i|ck|(A−B),<br />
=⇒<br />
{<br />
|ϕ| 2 = [ AA+BB +2Re(AB) ] ,<br />
|ψ| 2 = |ck| 2[ AA+BB −2Re(AB) ] ,<br />
si ha<br />
E = 1 (<br />
|ck|<br />
2<br />
∫R 2 |ˆϕ(k)| 2 +|ˆψ(k)| 2) dk = 1 ∫<br />
|ck| 2( AA+BB ) (k)dk<br />
2<br />
N R N<br />
= 1 ∫<br />
|ck| 2( |A(k)| 2 +|A(−k)| 2) ∫<br />
dk = |ck| 2 |A(k)| 2 dk,<br />
2 R N R N<br />
che esprime l’energia in funzione del solo coefficiente A(k).
Capitolo 4<br />
Distribuzioni<br />
4.1 Distribuzioni<br />
Le <strong>di</strong>stribuzioni, dette anche funzioni generalizzate, sono state usate <strong>di</strong> fatto<br />
dai fisici (Heaviside, Dirac) fin dall’inizio del secolo scorso e furono teorizzate<br />
rigorosamente da Laurent Schwartz (Parigi 1915-2002) verso la fine degli anni<br />
’40. La teoria matematica rigorosa definisce <strong>le</strong> <strong>di</strong>stribuzioni come funzionali su<br />
uno spazio <strong>di</strong> funzioni molto regolari, dette “funzioni test”.<br />
Definizione 4.1 Sia Ω un a<strong>per</strong>to non vuoto <strong>di</strong> R N . Definiamo lo spazio del<strong>le</strong><br />
funzioni test su Ω come<br />
D(Ω) := {ϕ ∈ C ∞ | supp(ϕ) ⊂ K, K ⊂ Ω compatto} = C ∞ 0 (Ω).<br />
Una successione <strong>di</strong> funzioni test {ϕ n } ⊂ D(Ω) converge a una funzione test<br />
ϕ ∈ D(Ω) se<br />
1. esiste K ⊂ Ω compatto ta<strong>le</strong> che supp(ϕ n −ϕ) ⊂ K <strong>per</strong> ogni n;<br />
2. <strong>per</strong> ogni multi-ini<strong>di</strong>ce α si ha ∇ α ϕ n (x) → ∇ α ϕ(x) uniformemente. □<br />
Osserviamo che, come spazio vettoria<strong>le</strong>, lo spazio del<strong>le</strong> funzioni test è ugua<strong>le</strong> a<br />
C0 ∞ (Ω) ma ha in più una nozione <strong>di</strong> convergenza.1<br />
Esercizio 4.2 Dimostrare che la funzione<br />
{<br />
0, se |x| ≥ 1,<br />
ξ(x) :=<br />
e 1<br />
x 2 −1 , se |x| < 1,<br />
è una funzione test su R.<br />
Definizione 4.3 Una <strong>di</strong>stribuzione su Ω è un funziona<strong>le</strong> lineare e continuo su<br />
D(Ω) ovvero una funzione f : D(Ω) → C ta<strong>le</strong> che<br />
1 Ta<strong>le</strong> nozione <strong>di</strong> convergenza si può far <strong>di</strong>scendere da una precisa topologia su D(Ω) che<br />
rende D(Ω) uno spazio vettoria<strong>le</strong> topologico comp<strong>le</strong>to ma non-metrizzabi<strong>le</strong> (cioè non esiste<br />
nessuna norma che induca ta<strong>le</strong> topologia, si veda a questo proposito [10]). Tuttavia a noi non<br />
interesserà approfon<strong>di</strong>re questo aspetto.<br />
62
CAPITOLO 4. DISTRIBUZIONI 63<br />
1. f(aϕ+bψ) = af(ϕ)+bf(ψ) <strong>per</strong> ogni ϕ,ψ ∈ D(Ω) e a,b ∈ C;<br />
2. se ϕ n → ϕ in D(Ω), allora f(ϕ n ) → f(ϕ) in C. □<br />
L’insieme del<strong>le</strong> <strong>di</strong>stribuzioni su Ω è in<strong>di</strong>cato con D ′ (Ω) e spesso l’azione <strong>di</strong><br />
f ∈ D ′ (Ω) su ϕ ∈ D(Ω) si in<strong>di</strong>ca con 〈f,ϕ〉.<br />
Esercizio 4.4 Dimostrare che D ′ (Ω) con <strong>le</strong> o<strong>per</strong>azioni<br />
1. 〈f 1 +f 2 ,ϕ〉 := 〈f 1 ,ϕ〉+〈f 2 ,ϕ〉, <strong>per</strong> ogni f 1 ,f 2 ∈ D ′ (Ω) e ϕ ∈ D(Ω);<br />
2. 〈αf,ϕ〉 := α〈f,ϕ〉, <strong>per</strong> ogni f ∈ D ′ (Ω), α ∈ C e ϕ ∈ D(Ω);<br />
è uno spazio vettoria<strong>le</strong>. 2<br />
Esempio 4.5 (Distribuzioni regolari) Sia u ∈ L 1 loc (Ω) (cioè u ∈ L1 (K) <strong>per</strong><br />
ogni K ⊂ Ω compatto). Definiamo<br />
∫<br />
f u (ϕ) := u(x)ϕ(x)dx, ϕ ∈ D(Ω). (4.1)<br />
Ω<br />
Osserviamo che l’integra<strong>le</strong> esiste in quanto u è integrabi<strong>le</strong> sul supporto <strong>di</strong> ϕ e ϕ<br />
è limitata. Dunque la funzione f u : D(Ω) → C è ben definita ed è chiaramente<br />
lineare. Inoltre è continua poiché, se ϕ n è una successione convergente a ϕ in<br />
D(Ω), <strong>per</strong> definizione esiste un compatto K che contiene il supporto <strong>di</strong> ϕ−ϕ n<br />
e inoltre ϕ n → ϕ uniformemente. Quin<strong>di</strong><br />
∫<br />
|f u (ϕ)−f u (ϕ n )| ≤ ‖ϕ−ϕ n ‖ ∞<br />
|u(x)|dx → 0<br />
<strong>per</strong> n → ∞. Abbiamo così <strong>di</strong>mostrato che f u ∈ D ′ (Ω).<br />
Definizione 4.6 Una <strong>di</strong>stribuzione f ta<strong>le</strong> che f = f u , <strong>per</strong> una qualche u ∈<br />
L 1 loc<br />
(Ω), si <strong>di</strong>ce regolare.<br />
Si verifica facilmente che <strong>le</strong> <strong>di</strong>stribuzioni regolari su Ω formano un sottospazio<br />
<strong>di</strong> D ′ (Ω). Ta<strong>le</strong> sottospazio si identifica naturalmente con L 1 loc (Ω) <strong>per</strong> cui si<br />
<strong>di</strong>ce che “<strong>le</strong> <strong>di</strong>stribuzioni contengono <strong>le</strong> funzioni” (almeno quel<strong>le</strong> localmente<br />
integrabili). Notiamoaltresìche<strong>le</strong>stessefunzioni test sipossonoidentificarecon<br />
<strong>di</strong>stribuzioni regolari e dunque possiamo identificare D(Ω) con un sottospazio<br />
<strong>di</strong> D ′ (Ω) e scrivere<br />
D(Ω) ⊂ D ′ (Ω). (4.2)<br />
Osservazione 4.7 In realtà non dovremmo identificare una <strong>di</strong>stribuzione regolare<br />
con una singola funzione u ma con l’intera classe <strong>di</strong> equiva<strong>le</strong>nza del<strong>le</strong><br />
funzioni che <strong>di</strong>fferiscono da u su insiemi <strong>di</strong> misura nulla (è chiaro infatti che f u<br />
<strong>di</strong>pende solo dalla classe <strong>di</strong> equiva<strong>le</strong>nza <strong>di</strong> u).<br />
Le <strong>di</strong>stribuzioni non regolari si <strong>di</strong>cono singolari. La più ce<strong>le</strong>bre <strong>di</strong>stribuzione<br />
singolare è la delta <strong>di</strong> Dirac, presentata nel seguente esempio.<br />
2 È quello che si chiama il dua<strong>le</strong> dello spazio D(Ω). In genera<strong>le</strong>, lo spazio V ′ dei funzionali<br />
lineari continui su un certo spazio vettoria<strong>le</strong> topologico V è detto “dua<strong>le</strong>” <strong>di</strong> V.<br />
K
CAPITOLO 4. DISTRIBUZIONI 64<br />
Esempio 4.8 (Distribuzione delta <strong>di</strong> Dirac) Definiamo<br />
δ(ϕ) := ϕ(0), ϕ ∈ D(R N ). (4.3)<br />
È chiaro che δ : D(R N ) → C è ben definita e lineare. Inoltre è continua, poiché<br />
seϕ n → ϕinD(R N )sihasenz’altroϕ n (0) → ϕ(0). Quin<strong>di</strong>δ èuna<strong>di</strong>stribuzione<br />
su R N .<br />
Proposizione 4.9 La <strong>di</strong>stribuzione δ non è regolare, ovvero non esiste nessuna<br />
funzione u ∈ L 1 loc (RN ) ta<strong>le</strong> che δ = f u .<br />
Dimostrazione Se ta<strong>le</strong> funzione u esistesse si avrebbe<br />
∫<br />
ϕ(0) = u(x)ϕ(x)dx, ϕ ∈ D(R N ).<br />
R N<br />
Consideriamo <strong>le</strong> funzioni test<br />
ϕ n (x) := ξ(n|x|), x ∈ R N , n = 1,2,...<br />
dove ξ è la funzione definita nell’esercizio 4.2. Si averbbe allora<br />
∫ ∣ ∫<br />
1<br />
|ϕ n (0)| = ∣ u(x)e<br />
n 2 |x| 2 −1 ∣∣ dx ≤ |u(x)|dx<br />
|x|≤ 1 n<br />
|x|≤ 1 n<br />
e dunque ϕ n (0) → 0 <strong>per</strong> l’assoluta continuità dell’integra<strong>le</strong> <strong>di</strong> Lebesgue. D’altra<br />
parte ϕ n (0) = 1/e <strong>per</strong> cui si ha una contrad<strong>di</strong>zione.<br />
□<br />
Osservazione 4.10 Nella <strong>le</strong>tteratura fisica e ingegneristica si usa <strong>di</strong> solito una<br />
notazione non rigorosa (ma spesso efficace) che tratta la delta <strong>di</strong> Dirac come se<br />
fosse una <strong>di</strong>stribuzione regolare (cioè una funzione), scrivendo <strong>per</strong>ciò<br />
∫<br />
ϕ(0) = δ(x)ϕ(x)dx.<br />
R N<br />
anziché, più correttamente, ϕ(0) = δ(ϕ) oppure ϕ(0) = 〈δ,ϕ〉.<br />
Definizione 4.11 Si <strong>di</strong>ce che una successione <strong>di</strong> <strong>di</strong>stribuzioni f n ∈ D ′ (Ω)<br />
converge a f ∈ D ′ (Ω) se 〈f n ,ϕ〉 → 〈f,ϕ〉 <strong>per</strong> ogni ϕ ∈ D(R N ).<br />
Esempio 4.12 Consideriamo <strong>le</strong> funzioni Gaussiane g σ , definite in (3.17), che<br />
possiamo identificare come <strong>di</strong>stribuzioni regolari. Abbiamo già osservato in<br />
precedenza che <strong>le</strong> g σ sono un’approssimazione dell’identità. Pertanto possiamo<br />
applicare il Lemma 3.14 e la formula (3.16), ottenendo<br />
∫<br />
lim g σ (x)ϕ(x)dx = ϕ(0).<br />
σ→0 + R N<br />
Considerando g σ come una <strong>di</strong>stribuzione regolare, questa formula può essere<br />
interpretata nella teoria del<strong>le</strong> <strong>di</strong>stribuzioni come<br />
lim<br />
σ→0 + 〈g σ ,ϕ〉 = 〈δ,ϕ〉, (4.4)<br />
ovvero come il fatto che <strong>le</strong> gaussiane g σ convergono alla <strong>di</strong>stribuzione delta <strong>di</strong><br />
Dirac.
CAPITOLO 4. DISTRIBUZIONI 65<br />
Il precedente esempio si può ovviamente generalizzare a qulunque approssimazione<br />
dell’identità.<br />
Proposizione 4.13 Se f σ è un’approssimazione dell’identità, nel senso del<br />
Lemma 3.14, allora f σ → δ in D ′ (R N ).<br />
4.2 Derivazione <strong>di</strong> <strong>di</strong>stribuzioni<br />
Consideriamo u ∈ C 1 (R), <strong>per</strong> cui u e u ′ possono essere interpretate come <strong>di</strong>stribuzioni<br />
regolari, f u ,f u ′ ∈ D ′ (R). Se ϕ ∈ D(R), sia (a,b) un intervallo che<br />
contiene supp(ϕ). Usando l’integrazione <strong>per</strong> parti si ha 3<br />
= −<br />
∫<br />
〈f u ′,ϕ〉 =<br />
∫ b<br />
a<br />
R<br />
u ′ (x)ϕ(x)dx =<br />
∫<br />
u(x)ϕ ′ (x)dx = −<br />
Ω<br />
∫ b<br />
a<br />
u ′ (x)ϕ(x)dx<br />
u(x)ϕ ′ (x)dx = −〈f u ,ϕ ′ 〉.<br />
Notiamo che l’ultima espressione ha senso <strong>per</strong> qualunque <strong>di</strong>stribuzione e dunque<br />
l’idea è quella <strong>di</strong> prenderla come definizione <strong>per</strong> la derivata del<strong>le</strong> <strong>di</strong>stribuzioni.<br />
Definizione 4.14 Sia Ω ⊂ R e sia f ∈ D ′ (Ω). La derivata della <strong>di</strong>stribuzione<br />
f è la <strong>di</strong>stribuzione f ′ definita da<br />
〈f ′ ,ϕ〉 := −〈f,ϕ ′ 〉, ϕ ∈ D(Ω). (4.5)<br />
Verifichiamo che f ′ è effettivamente una <strong>di</strong>stribuzione: è chiaramente lineare e<br />
inoltre è continua poiché se ϕ n → ϕ in D(Ω), allora anche ϕ ′ n → ϕ′ in D(Ω),<br />
<strong>per</strong> cui 〈f,ϕ ′ n〉 → 〈f,ϕ ′ 〉 e dunque 〈f ′ ,ϕ n 〉 → 〈f ′ ,ϕ〉.<br />
Piùingenera<strong>le</strong>,<strong>per</strong>k ≥ 0, definiamoladerivatak-esimaf (k) tramitelarelazione<br />
〈f (k) ,ϕ〉 := (−1) k 〈f,ϕ (k) 〉, ϕ ∈ D(Ω),<br />
e, ancora più in genera<strong>le</strong>, se Ω ⊂ R N , f ∈ D ′ (Ω) e α è un multi-in<strong>di</strong>ce, ∇ α f è<br />
definita da<br />
〈∇ α f,ϕ〉 := (−1) |α| 〈f,∇ α ϕ〉, ϕ ∈ D(Ω). (4.6)<br />
Osserviamo quin<strong>di</strong> che <strong>le</strong> <strong>di</strong>stribuzioni hanno sempre derivate <strong>di</strong> qualunque<br />
or<strong>di</strong>ne, <strong>per</strong> definizione.<br />
Esempio 4.15 Sia δ la <strong>di</strong>stribuzione delta <strong>di</strong> Dirac uni<strong>di</strong>mensiona<strong>le</strong>; allora δ ′<br />
è la <strong>di</strong>stribuzione<br />
〈δ ′ ,ϕ〉 = −〈δ,ϕ ′ 〉 = −ϕ ′ (0), ϕ ∈ D(R).<br />
Più in genera<strong>le</strong>, se δ è la delta <strong>di</strong> Dirac N-<strong>di</strong>mensiona<strong>le</strong> e α è un multi-in<strong>di</strong>ce<br />
〈∇ α δ,ϕ〉 = (−1) |α| 〈δ,∇ α ϕ〉 = (−1) |α| ∇ α ϕ(0), ϕ ∈ D(R N ). (4.7)<br />
3 Il ragionamento si può estendere al caso <strong>di</strong> un qualunque a<strong>per</strong>to Ω ⊂ R osservando che,<br />
comunque, il supporto <strong>di</strong> ϕ ∈ D(Ω) si può racchiudere in un numero finito <strong>di</strong> intervalli chiusi,<br />
limitati e con interno non-vuoto.
CAPITOLO 4. DISTRIBUZIONI 66<br />
Se f u è una <strong>di</strong>stribuzione regolare (supponiamola uni<strong>di</strong>mensiona<strong>le</strong> <strong>per</strong> semplicità),<br />
<strong>di</strong>stinguiamo tre casi:<br />
1. f ′ u non è una <strong>di</strong>stribuzione regolare: in questo caso f ′ u è semplicemente la<br />
derivata <strong>di</strong>stribuziona<strong>le</strong> <strong>di</strong> f u ;<br />
2. u è <strong>di</strong> classe C 1 : in questo caso (come abbiamo visto integrando <strong>per</strong> parti)<br />
f u ′ = f u ′, einquestosensoladerivata<strong>di</strong>stribuziona<strong>le</strong>“coincide”conquella<br />
classica;<br />
3. u non è necessariamente <strong>di</strong> classe C 1 , ma f ′ u è una dstribuzione regolare:<br />
dunqueesiste v ∈ L 1 loc (R) ta<strong>le</strong>chef′ u = f v: ta<strong>le</strong> funzionev èdetta derivata<br />
debo<strong>le</strong> <strong>di</strong> u (e si continua a in<strong>di</strong>carla con u ′ ).<br />
Osserviamo quin<strong>di</strong> che abbiamo introdotto un concetto <strong>di</strong> derivazione (<strong>di</strong> una<br />
norma<strong>le</strong> funzione, non <strong>di</strong> una <strong>di</strong>stribuzione) più debo<strong>le</strong>, cioè più genera<strong>le</strong>, <strong>di</strong><br />
quello tra<strong>di</strong>ziona<strong>le</strong>. Ta<strong>le</strong> definizione può benissimo essere data anche svincolandosi<br />
dalla toria del<strong>le</strong> <strong>di</strong>stribuzioni:<br />
Definizione 4.16 Sia Ω ⊂ R N a<strong>per</strong>to e sia u ∈ L 1 loc (Ω). Se esiste v ∈ L1 loc (Ω)<br />
ta<strong>le</strong> che ∫ ∫<br />
u(x)ϕ ′ (x)dx = − v(x)ϕ(x)dx, ϕ ∈ C0 ∞ (Ω),<br />
Ω<br />
Ω<br />
ta<strong>le</strong> v è detta derivata debo<strong>le</strong> <strong>di</strong> u.<br />
Esempio 4.17 Consideriamo la funzione<br />
{<br />
x, se x ≥ 0,<br />
u(x) :=<br />
0, se x < 0.<br />
Per ogni ϕ ∈ D(R) si ha<br />
∫ +∞<br />
−∞<br />
u(x)ϕ ′ (x)dx =<br />
= −<br />
∫ +∞<br />
∫ +∞<br />
dove H è la funzione <strong>di</strong> Heaviside<br />
0<br />
0<br />
xϕ ′ ∣<br />
(x)dx = xϕ(x)<br />
ϕ(x)dx = −<br />
∫ +∞<br />
−∞<br />
∣ +∞<br />
0<br />
−<br />
H(x)ϕ(x)dx,<br />
∫ +∞<br />
0<br />
ϕ(x)dx<br />
H(x) :=<br />
{<br />
1, se x ≥ 0,<br />
0, se x < 0.<br />
(4.8)<br />
Perciò u ha derivata debo<strong>le</strong> e ta<strong>le</strong> derivata è H. Ora facciamo la derivata <strong>di</strong> H:<br />
∫ +∞<br />
−∞<br />
H(x)ϕ ′ (x)dx =<br />
∫ +∞<br />
0<br />
ϕ ′ (x)dx = −ϕ(0) = −〈δ,ϕ〉.<br />
Dunque H, come <strong>di</strong>stribuzione, ha <strong>per</strong> derivata la delta <strong>di</strong> Dirac; tuttavia H,<br />
come funzione, non ha derivata debo<strong>le</strong> in quanto δ non è una <strong>di</strong>stribuzione<br />
regolare.
CAPITOLO 4. DISTRIBUZIONI 67<br />
Proposizione 4.18 Se f n → f in D ′ (Ω), allora ∇ α f n → ∇ α f in D ′ (Ω) <strong>per</strong><br />
ogni multi-in<strong>di</strong>ce α.<br />
Dimostrazione Per ogni ϕ ∈ D(Ω) si ha<br />
〈∇ α f n ,ϕ〉 = (−1) |α| 〈f n ,∇ α ϕ〉 → (−1) |α| 〈f,∇ α ϕ〉 = 〈∇ α f,ϕ〉,<br />
il che prova l’asserto.<br />
□<br />
Quin<strong>di</strong> possiamo <strong>di</strong>re, ad esempio, che ∇ α g σ → ∇ α δ <strong>per</strong> σ → 0 + (dove g σ è,<br />
come la solito, la Gaussiana).<br />
La definizione <strong>di</strong> derivata <strong>di</strong> una <strong>di</strong>stribuzione è stata data “scaricando” l’o<strong>per</strong>azione<br />
<strong>di</strong> derivazione sul<strong>le</strong> funzioni test, ovvero tramite quella che si chiama<br />
una identità aggiunta. Supponiamo che T rappresenti una certa o<strong>per</strong>azione che<br />
ha senso <strong>per</strong> <strong>le</strong> normali funzioni (o almeno <strong>per</strong> un sottoinsieme <strong>di</strong> esse) e che<br />
vogliamo estendere al<strong>le</strong> <strong>di</strong>stribuzioni. Se riusciamo a in<strong>di</strong>viduare S ta<strong>le</strong> che, <strong>per</strong><br />
ogni ϕ funzione test, valga<br />
∫ ∫<br />
(Tu)(x)ϕ(x)dx = u(x)(Sϕ)(x)dx<br />
Ω<br />
(detta appunto “identità aggiunta”), allora si può provare a definire Tf, <strong>per</strong><br />
ogni <strong>di</strong>stribuzione f, ponendo<br />
Ω<br />
〈Tf,ϕ〉 := 〈f,Sϕ〉.<br />
La con<strong>di</strong>zione <strong>per</strong> poter far ciò è che Sϕ sia ancora una funzione test. Nel caso<br />
dell’o<strong>per</strong>azione <strong>di</strong> derivazione T = ∇ α e S = (−1) |α| ∇ α .<br />
Un altro esempio <strong>di</strong> definizione che si basa su un’identità aggiunta è dato dalla<br />
traslazione <strong>di</strong> una <strong>di</strong>stribuzione. La traslazione <strong>di</strong> una funzione è un’o<strong>per</strong>azione<br />
“puntua<strong>le</strong>”,<br />
(T a u)(x) = u(x−a),<br />
che ovviamente non può essere trasferita così com’è al<strong>le</strong> <strong>di</strong>stribuzioni. Tuttavia,<br />
se u ∈ L 1 loc (RN ) e a ∈ R N , si ha<br />
∫ ∫<br />
u(x−a)ϕ(x)dx = u(x)ϕ(x+a)dx,<br />
R N R N<br />
che è un’identità aggiunta. Osservando che T −a ϕ ∈ D(R N ), possiamo definire<br />
la traslata <strong>di</strong> una qualunque <strong>di</strong>stribuzione f ∈ D ′ (R N ) come<br />
Se ad esempio trasliamo la δ otteniamo<br />
〈T a f,ϕ〉 := 〈f,T −a ϕ〉, ϕ ∈ D(R N ). (4.9)<br />
〈T a δ,ϕ〉 = 〈δ,T −a ϕ〉 = ϕ(a).<br />
La delta <strong>di</strong> Dirac traslata <strong>di</strong> a (si <strong>di</strong>ce più spesso “centrata” in a) si in<strong>di</strong>ca con<br />
δ a . Utilizzando la notazione <strong>di</strong> tipo “pseudofunzione” <strong>per</strong> la δ (osservazione<br />
4.10), l’azione della delta traslata si scrive così:<br />
∫<br />
R N δ(x−a)ϕ(x)dx = ϕ(a).
CAPITOLO 4. DISTRIBUZIONI 68<br />
Osserviamo quin<strong>di</strong> che il valore <strong>di</strong> ϕ nel punto a si ottiene come “convoluzione”<br />
<strong>di</strong> ϕ con δ (la formula <strong>di</strong> convoluzione con la delta sarà introdotta da un punto<br />
<strong>di</strong> vista rigoroso più avanti).<br />
Un altro esempio <strong>di</strong> definizione tramite identità aggiunta è l’o<strong>per</strong>azione <strong>di</strong><br />
moltiplicazione <strong>di</strong> una <strong>di</strong>stribuzione f <strong>per</strong> una funzione ϑ : Ω → C. Poiché<br />
chiaramente si ha<br />
∫ ∫<br />
(ϑu)(x)ϕ(x)dx = u(x)(ϑϕ)(x)dx,<br />
Ω<br />
Ω<br />
possiamo pensare <strong>di</strong> definire, <strong>per</strong> ogni f ∈ D ′ (Ω),<br />
〈ϑf,ϕ〉 = 〈f,ϑϕ〉, ϕ ∈ D(Ω). (4.10)<br />
Tuttavia bisogna stare attenti che ϑ sia ta<strong>le</strong> che ϑϕ ∈ D(Ω) <strong>per</strong> ogni ϕ ∈ D(Ω).<br />
Si <strong>di</strong>mostra facilmente che se ϑ è una funzione C ∞ , allora ϑf ∈ D(Ω) e la (4.10)<br />
definisce effettivamente una <strong>di</strong>stribuzione.<br />
Esercizio 4.19 Dimostrare che T a f e ϑf sopra definite (con ϑ ∈ C ∞ (Ω)) sono<br />
<strong>di</strong>stribuzioni.<br />
Proposizione 4.20 Sia ϑ ∈ C ∞ (Ω) e sia x 0 ∈ Ω uno zero <strong>di</strong> ϑ <strong>di</strong> molteplicità<br />
n + 1 (ovvero ϑ e tutte <strong>le</strong> sue derivate fino all’or<strong>di</strong>ne n si annullano in x 0 ).<br />
Allora l’equazione<br />
ϑf = 0<br />
ammette <strong>le</strong> soluzioni <strong>di</strong>stribuzionali<br />
f = ∑<br />
|α|≤n<br />
con d α coefficienti comp<strong>le</strong>ssi arbitrari.<br />
d α ∇ α δ x0 ,<br />
Dimostrazione Verifichiamo che ∇ α δ x0 è soluzione se |α| ≤ n. Per ogni<br />
funzione test ϕ, dal<strong>le</strong> definizioni (4.7) e (4.10) otteniamo<br />
〈ϑ∇ α δ x0 ,ϕ〉 = 〈∇ α δ x0 ,ϑϕ〉 = (−1) |α| ∇ α (ϑϕ)(x 0 ).<br />
D’altra parte<br />
∇ α (ϑϕ)(x 0 ) = ∑ γ≤α<br />
( α<br />
γ)<br />
∇ γ ϑ(x 0 )∇ α−γ ϕ(x 0 )<br />
che è ugua<strong>le</strong> a zero <strong>per</strong> ipotesi.<br />
□<br />
4.3 Trasformata <strong>di</strong> Fourier <strong>di</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate<br />
Consideriamo la seguente proprietà della trasformazione <strong>di</strong> Fourier (la cui <strong>di</strong>mostrazione<br />
è lasciata <strong>per</strong> esercizio).
CAPITOLO 4. DISTRIBUZIONI 69<br />
Proposizione 4.21 Se u,ϕ ∈ L 1 (R N ), allora ûϕ, uˆϕ ∈ L 1 (R N ) e va<strong>le</strong> l’identità<br />
∫ ∫<br />
û(x)ϕ(x)dx = u(x) ˆϕ(x)dx. (4.11)<br />
R N R N<br />
Seguendo l’idea della definizione data <strong>per</strong> “identità aggiunta”,vista nel paragrafo<br />
precedente, la (4.11) sembra in<strong>di</strong>care la strada <strong>per</strong> definire la trasformata <strong>di</strong><br />
Fourier <strong>di</strong> una <strong>di</strong>stribuzione f me<strong>di</strong>ante la formula “〈ˆf,ϕ〉 = 〈f, ˆϕ〉”. Tuttavia<br />
si incontra subito una <strong>di</strong>fficoltà: se ϕ ∈ D(R N ), non è detto che ˆϕ stia ancora<br />
in D(R N ), 4 <strong>per</strong> cui non ha senso scrivere l’azione <strong>di</strong> f su ϕ. Lo spazio del<strong>le</strong><br />
funzioni test è troppo restrittivo (e <strong>di</strong> conseguenza quello del<strong>le</strong> <strong>di</strong>stribuzioni<br />
troppo largo) <strong>per</strong> poter definire la trasformata <strong>di</strong> Fourier <strong>di</strong> una <strong>di</strong>stribuzione.<br />
Un buono spazio <strong>di</strong> funzioni test <strong>per</strong> questo scopo deve essere invariante sotto<br />
trasformazione <strong>di</strong> Fourier. Ricordando i risultati del capitolo precedente, è<br />
natura<strong>le</strong> pensare <strong>di</strong> ricorrere al<strong>le</strong> funzioni <strong>di</strong> Schwartz.<br />
Nel capitolo precedente abbiamo definito lo spazio <strong>di</strong> Schwartz (definizione 3.8)<br />
e la convergenza in ta<strong>le</strong> spazio (definizione 3.9). Osserviamo che se ϕ n → ϕ in<br />
D(R N ), allora ϕ n → ϕ in S(R N ), poiché supp(ϕ n −ϕ) ⊂ K, con K compatto,<br />
e quin<strong>di</strong> |x α ∇ β (ϕ n −ϕ)| ≤ M α |∇ β (ϕ n −ϕ)|, e inoltre ∇ β ϕ n (x) → ∇ α ϕ(x)<br />
uniformemente (ricordare la definizione 4.1). Dunque non solo D(R N ) ⊂ S(R N )<br />
ma si può anche <strong>di</strong>re che l’inclusione è continua.<br />
Definizione 4.22 Una <strong>di</strong>stribuzione tem<strong>per</strong>ata (o “a crescita <strong>le</strong>nta”) su R N è<br />
un funziona<strong>le</strong> lineare e continuo su S(R N ) ovvero una funzione f : S(R N ) → C<br />
ta<strong>le</strong> che<br />
1. f(aϕ+bψ) = af(ϕ)+bf(ψ) <strong>per</strong> ogni ϕ,ψ ∈ S(R N ) e a,b ∈ C;<br />
2. se ϕ n → ϕ in S(R N ), allora f(ϕ n ) → f(ϕ) in C. □<br />
Lo spazio del<strong>le</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate si in<strong>di</strong>ca con S ′ (R N ) 5 . Anche in questo<br />
caso l’azione <strong>di</strong> f su ϕ si può in<strong>di</strong>care con 〈f,ϕ〉.<br />
Proposizione 4.23 Una <strong>di</strong>stribuzione tem<strong>per</strong>ata è una <strong>di</strong>stribuzione, cioè si<br />
ha S ′ (R N ) ⊂ D ′ (R N ).<br />
Dimostrazione Se f ∈ S ′ (R N ), chiaramente, f è un funziona<strong>le</strong> lineare su<br />
D(R N ) ⊂ S(R N ). Se, inoltre, ϕ n → ϕ in D(R N ) allora, come abbiamo detto, si<br />
haancheϕ n → ϕinS(R N ). Mapoichéf ∈ S ′ (R N ) si haallora〈f,ϕ n 〉 → 〈f,ϕ〉,<br />
e dunque f è continuo su D(R N ).<br />
□<br />
Possiamo riassumere quanto detto finora <strong>di</strong>cendo che valgono <strong>le</strong> relazioni<br />
D(R N ) ⊂ S(R N ) ⊂ S ′ (R N ) ⊂ D ′ (R N ). (4.12)<br />
Osserviamochela<strong>di</strong>stinzione<strong>di</strong>stribuzioniregolari/singolariètrasversa<strong>le</strong>rispetto<br />
alla<strong>di</strong>stinzione tem<strong>per</strong>ate/non-tem<strong>per</strong>ate. Ad esempio, e x2 èuna<strong>di</strong>stribuzione<br />
regolare ma non tem<strong>per</strong>ata , poiché ∫ +∞<br />
−∞ ex2 ϕ(x)dx non è necessariamente<br />
4 Anzi, si può <strong>di</strong>mostrare che non è possibi<strong>le</strong> che ϕ e ˆϕ stiano entrambe in D(R N ).<br />
5 Si tratta infatti del dua<strong>le</strong> dello spazio vettoria<strong>le</strong> topologico S(R N )
CAPITOLO 4. DISTRIBUZIONI 70<br />
convergenteseϕèunafunzione<strong>di</strong> Schwartz(siprendaadesempioϕ(x) = e −x2 ).<br />
Viceversa, ci sono <strong>di</strong>stribuzioni singolari che sono anche tem<strong>per</strong>ate (ad esempio<br />
la δ e tutte <strong>le</strong> sue derivate).<br />
Esercizio 4.24 Dimostrare che la <strong>di</strong>stribuzione f = ∑ ∞<br />
n=0 en δ n è singolare e<br />
non tem<strong>per</strong>ata.<br />
Ve<strong>di</strong>amo ora una con<strong>di</strong>zione sufficiente affinché una <strong>di</strong>stribuzione regolare sia<br />
tem<strong>per</strong>ata.<br />
Proposizione 4.25 Se u ∈ L 1 loc (RN ) è ta<strong>le</strong> che<br />
u(x)<br />
(<br />
1+|x|<br />
2 ) m ∈ L 1 (R N ),<br />
<strong>per</strong> un qualche m = 0,1,2,..., allora f u è una <strong>di</strong>stribuzione tem<strong>per</strong>ata.<br />
Dimostrazione Sia ϕ ∈ S(R N ). Possiamo scrivere<br />
∫<br />
∫<br />
∣ u(x)ϕ(x)dx<br />
∣ ≤ |u(x)|<br />
(<br />
2 ) (<br />
2 ) m<br />
m 1+|x| |ϕ(x)|dx<br />
R N 1+|x|<br />
R N<br />
≤ ‖ ( 1+|x| 2) m<br />
ϕ‖∞<br />
∫<br />
R N<br />
|u(x)|<br />
(<br />
1+|x|<br />
2 ) m dx < +∞<br />
e <strong>per</strong>ciò l’azione <strong>di</strong> f u è ben definita. Ve<strong>di</strong>amo la continuità (basterà far vedere<br />
che 〈f u ,ϕ n 〉 → 0 se ϕ n → 0 in S(R N )). Per una ta<strong>le</strong> successione ϕ n si ha<br />
(<br />
2 ) m<br />
1 + |x| ϕn (x) → 0 uniformemente (infatti ( 1 + |x| 2) m<br />
è un polinomio <strong>di</strong><br />
grado 2m in x 1 ,x 2 ,...x n ). Dunque, con gli stessi passaggi precedenti, si avrà<br />
∫<br />
∣ u(x)ϕ n (x)dx<br />
∣ ≤ ‖( 1+|x| 2) ∫<br />
m<br />
ϕn ‖ ∞<br />
R N<br />
R N<br />
|u(x)|<br />
(<br />
1+|x|<br />
2 ) m dx → 0<br />
<strong>per</strong> n → +∞.<br />
□<br />
Corollario 4.26 Se u ∈ L 1 loc (RN ) è ta<strong>le</strong> che<br />
u(x)<br />
lim<br />
|x|→∞ |x| M = 0<br />
<strong>per</strong> un qualche M = 0,1,2,..., allora f u è una <strong>di</strong>stribuzione tem<strong>per</strong>ata.<br />
Dimostrazione Esiste R > 0 ta<strong>le</strong> che |u(x)| ≤ |x| M <strong>per</strong> ogni |x| > R. Sicuramente<br />
esiste m sufficientemente grande affinché |x| M / ( 1+|x| 2) m<br />
, e quin<strong>di</strong><br />
a maggior ragione u(x)/ ( 1 + |x| 2) m<br />
, sia integrabi<strong>le</strong> in |x| > R. D’altra parte,<br />
u(x)/ ( 1+|x| 2) m<br />
è certamente integrabi<strong>le</strong> in |x| ≤ R. Pertanto si può applicare<br />
la proposizione precedente.<br />
□<br />
Le <strong>di</strong>stribuzioni tem<strong>per</strong>ate sono importanti <strong>per</strong>ché, come anticipato nella <strong>di</strong>scussione<br />
inizia<strong>le</strong>, se ne può definire la trasformata <strong>di</strong> Fourier. Osserviamo
CAPITOLO 4. DISTRIBUZIONI 71<br />
innanzitutto che se u ∈ L 1 (R N ) allora sia f u che fû sono <strong>di</strong>stribuzioni tem<strong>per</strong>ate.<br />
Infatti, u è una <strong>di</strong>stribuzione tem<strong>per</strong>ata <strong>per</strong> la proposizione 4.25 e û è una<br />
<strong>di</strong>stribuzione tem<strong>per</strong>ata <strong>per</strong> il corollario 4.26 e la proposizione 3.3. La formula<br />
(4.11) con u ∈ L 1 (R N ) e ϕ ∈ S(R N ) è stavolta una buona identità aggiunta (ricor<strong>di</strong>amo<br />
che ˆϕ ∈ S(R N ) <strong>per</strong> la proposizione 3.10a) che ci <strong>per</strong>mette <strong>di</strong> definire<br />
la trasformata <strong>di</strong> Fourier <strong>di</strong> una <strong>di</strong>stribuzione tem<strong>per</strong>ata.<br />
Definizione 4.27 Sia f ∈ S ′ (R N ). Definiamo la trasformata <strong>di</strong> Fourier ˆf<br />
come la <strong>di</strong>stribuzione tem<strong>per</strong>ata data da<br />
〈ˆf,ϕ〉 = 〈f, ˆϕ〉, ϕ ∈ S(R N ). (4.13)<br />
Naturalmentedobbiamoverificareche ˆf cosìdefinitaèdavverouna<strong>di</strong>stribuzione<br />
tem<strong>per</strong>ata:<br />
1. è ben definita (in quanto ˆϕ ∈ S(R N ) <strong>per</strong> la proposizione 3.10a) e lineare;<br />
2. se ϕ n → ϕ in S(R N ), allora ˆϕ n → ˆϕ (proposizione 3.10b) e dunque<br />
〈ˆf,ϕ n 〉 = 〈f, ˆϕ n 〉 → 〈f, ˆϕ〉 = 〈ˆf,ϕ〉,<br />
il che significa che ˆf è un funziona<strong>le</strong> continuo su S(R N ).<br />
Esten<strong>di</strong>amo la notazione F : S ′ (R N ) → S ′ (R N ), Ff := ˆf, <strong>per</strong> in<strong>di</strong>care la trasformazione<br />
<strong>di</strong> Fourier sullo spazio del<strong>le</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate. Se definiamo<br />
〈F ∗ f,ϕ〉 = 〈f,F ∗ ϕ〉, ϕ ∈ S(R N ),<br />
si vede facilmente, usando <strong>le</strong> analoghe proprietà della trasformazione <strong>di</strong> Fourier<br />
sul<strong>le</strong>funzioni<strong>di</strong>Schwartz,cheF ∗ Ff = FF ∗ f = f,<strong>per</strong>cuiF ∗ = F −1 e<strong>per</strong>tanto<br />
la trasformazione <strong>di</strong> Fourier sul<strong>le</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate è invertibi<strong>le</strong>.<br />
Si <strong>di</strong>mostra anche facilmente che F è continua (rispetto all’ovvia nozione <strong>di</strong><br />
convergenza del<strong>le</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate).<br />
Prima <strong>di</strong> passare agli esempi occorre definire la moltiplicazione <strong>di</strong> una <strong>di</strong>stribuzione<br />
tem<strong>per</strong>ata <strong>per</strong> una funzione.<br />
Definizione 4.28 Sia ϑ ∈ C ∞ (R N ) una funzione ta<strong>le</strong> che <strong>per</strong> ogni multi-in<strong>di</strong>ce<br />
α esitono M α ≥ 0 e m α = 0,1,2,... tali che<br />
|∇ α ϑ(x)| ≤ M α (1+|x| 2 ) mα , x ∈ R N .<br />
Se f ∈ S ′ (R N ) definiamo la <strong>di</strong>stribuzione tem<strong>per</strong>ata ϑf come<br />
〈ϑf,ϕ〉 = 〈f,ϑϕ〉, ϕ ∈ S(R N ).<br />
Esercizio 4.29 Dimostrare che ϑf è effettivamente una <strong>di</strong>stribuzione tem<strong>per</strong>ata.
CAPITOLO 4. DISTRIBUZIONI 72<br />
Esempio 4.30 (Trasformata <strong>di</strong> Fourier della delta <strong>di</strong> Dirac) Calcoliamo<br />
la trasformata <strong>di</strong> Fourier della <strong>di</strong>stribuzione δ. Per ogni ϕ ∈ S(R N ) si ha<br />
〈ˆδ,ϕ〉 = 〈δ, ˆϕ〉 = ˆϕ(0) = c N<br />
∫R N ϕ(x)dx.<br />
Perciò ˆδ è la <strong>di</strong>stribuzione regolare costante c N :<br />
Consideriamo ora la delta traslata δ a . Si ha:<br />
ˆδ = c N . (4.14)<br />
〈̂δ a ,ϕ〉 = 〈δ a , ˆϕ〉 = ˆϕ(a) = c N<br />
∫R N e −ix·a ϕ(x)dx,<br />
<strong>per</strong>ciò<br />
̂δ a = c N e −ix·a . (4.15)<br />
Esempio 4.31 (Trasformata <strong>di</strong> Fourier <strong>di</strong> e ix·a ) Poiché la trasformazione<br />
<strong>di</strong> Fourier è invertibi<strong>le</strong> su S ′ (R N ), possiamo usare la formula precedente <strong>per</strong><br />
ricavare la trasformatadella funzione e ix·a . Applicando F ∗ a entrambi i membri<br />
della (4.15) (e ricordando <strong>le</strong> relazioni (3.23)) si ottiene<br />
<strong>per</strong> cui<br />
δ a = c N F ∗ e −ix·a = c N FJe −ix·a = c N Fe ix·a ,<br />
̂ e ix·a = δ a /c N (4.16)<br />
(naturalmente la setssa conclusione poteva essere ottenuta anche con un calcolo<br />
<strong>di</strong>retto con la definizione (4.13), provare <strong>per</strong> esercizio). In particolare, la<br />
trasformata <strong>di</strong> Fourier della funzione costante 1 è<br />
̂1 = δ/c N . (4.17)<br />
Osserviamo che c N F e ik·x = δ x è la veste rigorosa del’uguaglianza<br />
∫<br />
1<br />
(2π) N e ik·(x−y) dx = δ(x−y)<br />
R N<br />
incontrata euristicamente nell’osservazione 3.22. Limitandoci al caso uni<strong>di</strong>mensiona<strong>le</strong><br />
osserviamo anche che, posto<br />
{<br />
1, se |x| ≤ R,<br />
χ R (x) =<br />
0, se |x| > R,<br />
si ha χ R → 1 in S ′ (R) (infatti 〈χ R ,ϕ〉 = ∫ R<br />
−R ϕ(x)dx → ∫ +∞<br />
ϕ(x)dx = 〈1,ϕ〉)<br />
−∞<br />
e <strong>per</strong>tanto ̂χ R → ˆ1 = √ 2πδ, cioè<br />
1<br />
2π<br />
∫ +R<br />
−R<br />
e ik·x dx = 1 π 2 sin(Rk)<br />
k<br />
→ δ.<br />
Dunque l’“integra<strong>le</strong>” 1<br />
2π<br />
∫ +∞<br />
−∞ eik·x dx = δ(x) si può vedere anche come limite<br />
(nel senso del<strong>le</strong> <strong>di</strong>stribuzioni) <strong>di</strong> integrali su |x| ≤ R (analoghe considerazioni si<br />
possono fare anche a <strong>di</strong>mensione N).
CAPITOLO 4. DISTRIBUZIONI 73<br />
Esempio 4.32 (Relazione fra serie e trasformata <strong>di</strong> Fourier) Supponiamo<br />
che f : R → C sia una funzione T-<strong>per</strong>io<strong>di</strong>ca e <strong>di</strong> classe L 1 (0,T) (e <strong>per</strong>ciò<br />
anche L 1 loc (R)). Utilizzando lo sviluppo in serie <strong>di</strong> Fourier <strong>di</strong> f<br />
f(x) = ∑ n∈Z<br />
f n e i2π T nx<br />
e la formula (4.16) si ottiene<br />
̂f = √ 2π ∑ n∈Zf n δ2nπ<br />
T . (4.18)<br />
Questa identità ci <strong>di</strong>ce che la trasformata <strong>di</strong> Fourier <strong>di</strong> una funzione <strong>per</strong>io<strong>di</strong>ca<br />
è “concentrata” nei punti (del cosiddetto “reticolo reciproco”) 2nπ/T, n ∈ Z.<br />
La serie <strong>di</strong> Fourier è interpretabi<strong>le</strong> come la formula <strong>di</strong> inversione <strong>di</strong> questa trasformata.<br />
Dunque la teoria del<strong>le</strong> <strong>di</strong>stribuzioni <strong>per</strong>mette <strong>di</strong> unificare la teoria<br />
<strong>di</strong> serie e trasformata <strong>di</strong> Fourier: la prima può essere interpretata come caso<br />
particolare della seconda quando <strong>le</strong> funzioni che si trasformano sono <strong>per</strong>io<strong>di</strong>che.<br />
Esempio 4.33 (Trasf. <strong>di</strong> Fourier della funzione <strong>di</strong> Heaviside) Consideriamo<br />
intanto la trasformata <strong>di</strong> Fourier della funzione segno (cfr. nota a pag. 114).<br />
Per ogni ϕ ∈ S(R) si ha<br />
〈ŝgn,ϕ〉 = 〈sgn, ˆϕ〉 = c 1<br />
∫ +∞<br />
−∞<br />
∫ R<br />
{∫ +∞<br />
= lim c 1 sgn(k)<br />
R→+∞ −R −∞<br />
∫ {<br />
+∞ ∫ R<br />
= lim<br />
R→+∞ c 1<br />
−∞<br />
2c 1<br />
= lim<br />
R→+∞ i<br />
ϕ(x)<br />
∫ +∞<br />
−∞<br />
{∫ +∞<br />
}<br />
sgn(k) ϕ(x)e −ik·x dx dk<br />
−∞<br />
}<br />
ϕ(x)e −ik·x dx dk<br />
sgn(k)e −ik·x dk<br />
−R<br />
ϕ(x) 1−cos(Rx)<br />
x<br />
dove si è dovuto introdurre il limite su R <strong>per</strong> poter applicare il teorema <strong>di</strong><br />
Fubini. Poiché ϕ è <strong>di</strong>fferenziabi<strong>le</strong>, possiamo scrivere<br />
ϕ(x) = ϕ(0)+xϕ 1 (x)<br />
con ϕ 1 continua (infatti ϕ(x) = ϕ(0) + xϕ ′ (0) + r(x) con r(x) infinitesimo <strong>di</strong><br />
or<strong>di</strong>ne su<strong>per</strong>iore a x). Introduciamo <strong>per</strong>ciò un α > 0 arbitrario e scriviamo<br />
∫<br />
|x|≤α<br />
∫ +∞<br />
−∞<br />
ϕ(x) 1−cos(Rx)<br />
x<br />
(ϕ(0)+xϕ 1 (x)) 1−cos(Rx)<br />
x<br />
( ∫<br />
dx =<br />
|x|≤α<br />
dx+<br />
+<br />
∫<br />
|x|>α<br />
∫<br />
|x|>α<br />
dx,<br />
}<br />
dx,<br />
)<br />
ϕ(x) 1−cos(Rx) dx =<br />
x<br />
ϕ(x)<br />
x dx− ∫<br />
|x|>α<br />
ϕ(x)<br />
x<br />
cos(Rx)dx.
CAPITOLO 4. DISTRIBUZIONI 74<br />
Poiché la funzione 1−cos(Rx)<br />
x<br />
è integrabi<strong>le</strong> e <strong>di</strong>spari si ha<br />
∫<br />
(ϕ(0)+xϕ 1 (x)) 1−cos(Rx) ∫<br />
dx = ϕ 1 (x)dx−<br />
x<br />
|x|≤α<br />
|x|≤α<br />
∫<br />
|x|≤α<br />
ϕ 1 (x)cos(Rx)dx.<br />
Il primo integra<strong>le</strong> può essere reso piccolo a piacere prendendo α abbastanza<br />
piccolo (in<strong>di</strong>pendentemente da R). Il secondo tende a zero <strong>per</strong> R → ∞ <strong>per</strong> il<br />
<strong>le</strong>mma <strong>di</strong> Riemann-Lebesgue (Lemma 3.2). Per lo stesso motivo (osservando<br />
che ϕ(x)/x è integrabi<strong>le</strong> <strong>per</strong> |x| > α) si ha che<br />
lim<br />
∫<br />
R→+∞<br />
|x|>α<br />
ϕ(x)<br />
x<br />
cos(Rx)dx = 0.<br />
In definitiva si ha<br />
lim<br />
R→+∞<br />
∫ +∞<br />
−∞<br />
ϕ(x) 1−cos(Rx)<br />
x<br />
dx =<br />
∫<br />
|x|≤α<br />
ϕ 1 (x)dx+<br />
∫<br />
|x|>α<br />
ϕ(x)<br />
x dx<br />
e, facendo tendere α a 0 si ottiene<br />
2c 1<br />
〈ŝgn,ϕ〉 = lim<br />
α→0 i<br />
∫<br />
|x|>α<br />
ϕ(x)<br />
x<br />
dx. (4.19)<br />
Possiamo dunque affermare che il membro <strong>di</strong> destra <strong>di</strong> questa equazione è una<br />
<strong>di</strong>stribuzione (tem<strong>per</strong>ata) che è data da un’integrazione nel senso del “valore<br />
principa<strong>le</strong>”. Chiamiamo v.p. 1 x<br />
la <strong>di</strong>stribuzione singolare6<br />
〈v.p. 1 ∫<br />
ϕ(x)<br />
,ϕ〉 := lim<br />
x α→0<br />
|x|>α x dx.<br />
e scriviamo <strong>per</strong>ciò<br />
ŝgn = 2c 1<br />
i<br />
v.p. 1 x = 2<br />
i √ 2π v.p.1 x . (4.20)<br />
Per calcolarela trasformatadella funzione <strong>di</strong> Heaviside (definizione (4.8)), basta<br />
osservare che<br />
H(x) = sgn(x)+1<br />
2<br />
e quin<strong>di</strong>, ricordando la (4.17),<br />
Ĥ = ŝgn+ˆ1<br />
2<br />
= c 1<br />
i v.p.1 x + δ √ ( ) π 1<br />
=<br />
2c 1 2 iπ v.p.1 x +δ . (4.21)<br />
Capita frequentemente che venga omessa la notazione “v.p.” <strong>per</strong> cui si parla<br />
della “<strong>di</strong>stribuzione 1 x ” intendendo v.p.1 x .<br />
6 Che v.p. 1 sia una <strong>di</strong>stribuzione segue dal fatto che, a meno <strong>di</strong> una costante moltiplicativa,<br />
x<br />
è la trasformata <strong>di</strong> Fourier <strong>di</strong> una <strong>di</strong>stribuzione tem<strong>per</strong>ata; naturalmente si può fare anche<br />
una <strong>di</strong>mostrazione <strong>di</strong>retta (provare <strong>per</strong> esercizio). Che v.p. 1 sia singolare segue dal fatto che<br />
x<br />
se v.p. 1 x = fu allora risulta u(x) = 1/x quasi ovunque, ma 1/x /∈ L1 loc (R).
CAPITOLO 4. DISTRIBUZIONI 75<br />
A suo tempo abbiamo visto il comportamento della trasformazione <strong>di</strong> Fourier<br />
rispetto alla derivazione (proposizione 3.7). Ve<strong>di</strong>amo se formu<strong>le</strong> analoghe valgono<br />
anche <strong>per</strong> <strong>le</strong> <strong>di</strong>stribuzioni tem<strong>per</strong>ate. Cominciamo dal caso uni<strong>di</strong>mensiona<strong>le</strong>:<br />
se f ∈ S ′ (R) e D = d<br />
dx<br />
allora, <strong>per</strong> ogni ϕ ∈ S(R), si può scrivere<br />
〈̂Df,ϕ〉 = 〈Df, ˆϕ〉 = −〈f,Dˆϕ〉 = 〈f,îxϕ〉 = 〈ˆf,ixϕ〉 = 〈ixˆf,ϕ〉<br />
e dunque<br />
̂Df = ixˆf.<br />
Inoltre<br />
〈̂xf,ϕ〉 = 〈xf, ˆϕ〉 = 〈f,xˆϕ〉 = 〈f, ̂−iDϕ〉 = 〈ˆf,−iDϕ〉 = 〈iDˆf,ϕ〉<br />
e dunque<br />
̂xf = iDˆf.<br />
Dunque ritroviamo <strong>per</strong> <strong>le</strong> <strong>di</strong>stribuzioni <strong>le</strong> stesse formu<strong>le</strong> trovate <strong>per</strong> <strong>le</strong> funzioni.<br />
Più in genera<strong>le</strong> è faci<strong>le</strong> <strong>di</strong>mostrare il seguente risultato.<br />
Proposizione 4.34 Per ogni f ∈ S ′ (R N ) e <strong>per</strong> ogni multi-in<strong>di</strong>ce α si ha<br />
̂∇ α f = (ix) α ˆf, ̂xα f = (i∇) α ˆf. (4.22)<br />
Esempio 4.35 Ricordando gli esempi 4.30 e 4.31 si calcolano facilmente <strong>le</strong><br />
trasformate <strong>di</strong> Fourier:<br />
• del<strong>le</strong> derivate della delta <strong>di</strong> Dirac: ̂∇α δ = c N (ix) α<br />
• dei monomi: ̂x α = ̂x α 1 = (i∇) α̂1 = (i∇) α δ/c N .<br />
Ad esempio, la trasformata <strong>di</strong> un polinomio p(x) = p 0 +p 1 x+···+p m x m è una<br />
<strong>di</strong>stribuzione che dà una combinazione lineare <strong>di</strong> derivate nell’origine:<br />
〈ˆp,ϕ〉 = p(iD)ϕ(0)/c 1 = √ (<br />
)<br />
2π p 0 ϕ(0)+ip 1 ϕ ′ (0)+···+i m p m ϕ (m) (0) .<br />
Esercizio 4.36 Ricordando che H ′ = δ (Esempio 4.17), verificare che Ĥ′ =<br />
ˆδ = c 1 utilizzando (4.21) e (4.22).<br />
Un’altra importante caratteristica della trasformazione <strong>di</strong> Fourier sul<strong>le</strong> funzioni<br />
èquella<strong>di</strong><strong>le</strong>gareprodottieconvoluzioni(proposizioni3.12e3.20). Conclu<strong>di</strong>amo<br />
<strong>per</strong>ciò la nostra <strong>di</strong>scussione sul<strong>le</strong> <strong>di</strong>stribuzioni mostrando che ta<strong>le</strong> caratteristica<br />
continua a va<strong>le</strong>reanche <strong>per</strong> la trasformazione<strong>di</strong> Fourier<strong>di</strong> <strong>di</strong>stribuzioni. Poiché,<br />
<strong>per</strong> u, ψ e ϕ integrabili, va<strong>le</strong> l’identità aggiunta<br />
∫<br />
∫<br />
(u∗ψ)(x)ϕ(x)dx = u(y)ψ(x−y)dyϕ(x)dx<br />
R<br />
∫R N N R N<br />
∫ ∫<br />
∫<br />
= u(y) ψ(x−y)ϕ(x)dxdy = u(y)(Jψ ∗ϕ)(y)dy,<br />
R N R N R N<br />
possiamo allora dare la seguente definizione.
CAPITOLO 4. DISTRIBUZIONI 76<br />
Definizione 4.37 Sia f ∈ S ′ (R N ) una <strong>di</strong>stribuzione tem<strong>per</strong>ata e ψ ∈ S(R N )<br />
una funzione <strong>di</strong> Schwartz. Definiamo la convoluzione <strong>di</strong> f con ψ come la<br />
<strong>di</strong>stribuzione tem<strong>per</strong>ata f ∗ψ definita da<br />
dove ricor<strong>di</strong>amo che Jψ(x) = ψ(−x).<br />
〈f ∗ψ,ϕ〉 = 〈f,Jψ ∗ϕ〉, ϕ ∈ S(R N ), (4.23)<br />
Esercizio 4.38 Dimostrare che, effettivamente, f ∗ψ ∈ S ′ (R N ).<br />
Anche <strong>per</strong> <strong>le</strong> <strong>di</strong>stribuzioni va<strong>le</strong> un analogo della formula (3.15), ovvero la trasformazione<br />
<strong>di</strong> Fourier manda convoluzioni in prodotti. Infatti, ricordando <strong>le</strong><br />
identità (3.23) e (3.24), <strong>per</strong> ogni f ∈ S ′ (R N ) e ψ,ϕ ∈ S ′ (R N ) possiamo scrivere<br />
〈F(f ∗ψ),ϕ〉 = 〈f ∗ψ,Fϕ〉 = 〈f,Jψ ∗Fϕ〉 = 〈f,F 2 ψ ∗Fϕ〉<br />
= c −1<br />
N<br />
〈f,F(Fψϕ)〉 = c−1<br />
N<br />
〈Ff,Fψϕ)〉 = c−1<br />
N 〈FψFf,ϕ〉.<br />
Notiamo che nell’ultimo passaggio si è usata la definizione 4.28. Si ha dunque<br />
c N ̂f ∗ψ = ˆψ ˆf, f ∈ S ′ (R N ), ψ ∈ S(R N ). (4.24)<br />
Esercizio 4.39 Dimostrare che va<strong>le</strong> anche la formula inversa<br />
̂ψf = c N ˆf ∗ ˆψ, f ∈ S ′ (R N ), ψ ∈ S(R N ). (4.25)<br />
Osservazione 4.40 C’è un altro modo, più <strong>di</strong>retto, <strong>di</strong> vedere la convoluzione<br />
tra f e ψ. Se f fosse una norma<strong>le</strong> funzione potremmo scrivere<br />
∫ ∫<br />
(f ∗ψ)(x) = f(y)ψ(x−y)dy = f(y)(T x Jψ)(y)dy.<br />
R N R N<br />
Perciò possiamo pensare <strong>di</strong> definire la convoluzione tra f (<strong>di</strong>stribuzione) e ψ<br />
(funzione <strong>di</strong> Schwartz) come la funzione.<br />
(f ∗ψ)(x) = 〈f,T x Jψ〉, x ∈ R N (4.26)<br />
(notare che questa espressione ha senso <strong>per</strong> ogni f ∈ S ′ (R N ) e ψ ∈ S(R N )).<br />
Si può <strong>di</strong>mostrare che <strong>le</strong> due definizioni coincidono, ovvero che la <strong>di</strong>stribuzione<br />
tem<strong>per</strong>ata f ∗ ψ (definizione (4.23)) è regolare e coincide con la funzione (f ∗<br />
ψ)(x) (definizione (4.26)).<br />
Per la delta <strong>di</strong> Dirac si ottiene, usando la definizione (4.26),<br />
(δ ∗ψ)(x) = 〈δ,T x Jψ〉 = (T x Jψ)(y) |y=0 = ψ(x).<br />
Abbiamo <strong>per</strong>ciò <strong>di</strong>mostrato che la convoluzione <strong>di</strong> una funzione ψ ∈ S(R N ) con<br />
la δ restituisce la funzione stessa:<br />
δ ∗ψ = ψ (4.27)<br />
(provare <strong>per</strong> esercizio a ricavare la stessa formula utilizzando la definizione<br />
(4.23)). Si tratta della versione rigorosa della formula euristica<br />
∫<br />
R N δ(x−y)ψ(y)dy = ψ(x).
CAPITOLO 4. DISTRIBUZIONI 77<br />
4.4 Soluzione dell’equazione <strong>di</strong> Poisson<br />
Consideriamo l’equazione <strong>di</strong> Poisson in R 3<br />
∆u(x) = −q(x), x ∈ R 3 , (4.28)<br />
dove q è una funzione assegnata, sufficientemente regolare. Dal punto <strong>di</strong> vista<br />
fisico, ta<strong>le</strong> equazioneèsod<strong>di</strong>sfattadaun potenzia<strong>le</strong>e<strong>le</strong>ttostaticoogravitaziona<strong>le</strong><br />
u, in presenza <strong>di</strong> una <strong>di</strong>stribuzione q <strong>di</strong> cariche o masse. 7<br />
Usando formalmente la trasformazione <strong>di</strong> Fourier <strong>per</strong> risolvere la (4.28) otteniamo<br />
|k| 2 û(k) = ˆq(k), k ∈ R 3 , (4.29)<br />
da cui 8 û(k) = ˆq(k)/|k| 2<br />
e quin<strong>di</strong>, antitrasformando,<br />
u = c 3 F ∗ (1/|k| 2 )∗q. (4.30)<br />
Tuttavia, ricordando che ∫ f(|k|)dk = 4π ∫ +∞<br />
f(ρ)ρ 2 dρ, si ha<br />
R 3 0<br />
∫<br />
∫<br />
1 +∞<br />
R 3 |k| 2α dk = 4π 0<br />
1<br />
ρ 2(α−1)dρ,<br />
che non converge <strong>per</strong> nessun valore <strong>di</strong> α. Dunque la funzione 1/|k| 2 non sta né<br />
in L 1 (R 3 ) né in L 2 (R 3 ) (ma <strong>per</strong> α = 1 si vede chiaramente che sta in L 1 loc (R3 ))<br />
e quin<strong>di</strong> la sua trasformata <strong>di</strong> Fourier può essere intesa solo nel senso del<strong>le</strong> <strong>di</strong>stribuzioni<br />
tem<strong>per</strong>ate. Ve<strong>di</strong>amoallora<strong>di</strong> calcolareF ∗ (1/|k| 2 ) come<strong>di</strong>stribuzione<br />
tem<strong>per</strong>ata. Per ogni ϕ ∈ S(R 3 ) possiamo scrivere<br />
∫ ∫<br />
〈F ∗ (1/|k| 2 ),ϕ〉 = 〈1/|k| 2 ,F ∗ 1<br />
ϕ〉 = c 3<br />
R 3 |k| 2 e ik·x ϕ(x)dxdk<br />
R 3<br />
∫<br />
lim c 3<br />
R→∞ |k|
CAPITOLO 4. DISTRIBUZIONI 78<br />
<strong>di</strong>retta lungo la <strong>di</strong>rezione in<strong>di</strong>viduata da x. In questo riferimento |k| = ρ e<br />
k ·x = ρ|x|cosθ, e dunque<br />
∫<br />
e ik·x ∫ R ∫ π ∫ 2π<br />
|k| 2 dk = e iρ|x|cosθ sinθdφdθdρ<br />
dove si è posto<br />
|k|
CAPITOLO 4. DISTRIBUZIONI 79<br />
Osservazione 4.41 Se pren<strong>di</strong>amo q = δ otteniamo u = Φ ∗ δ = Φ. Dunque<br />
la soluzione fondamenta<strong>le</strong> Φ è la soluzione dell’equazione <strong>di</strong> Poisson quando<br />
la sorgente q è una delta <strong>di</strong> Dirac. Questo è coerente col fatto che, da un<br />
punto <strong>di</strong> vista fisico, Φ è proprio il potenzia<strong>le</strong> coulombiano generato da una<br />
carica puntiforme positiva posta nell’origine. La soluzione (4.33) si può dunque<br />
interpretare come il risultato della sovrapposizione dei potenziali coulombiani<br />
generati in ogni punto y dello spazio dalla carica infinitesima q(y)dy.<br />
Osservazione 4.42 Con un metodo simi<strong>le</strong> a quello appena visto nel caso N =<br />
3, si può risolvere l’equazione <strong>di</strong> Poisson anche in R N , con N ≥ 1, e risulta che<br />
la soluzione è data dalla convoluzione con la soluzione fondamenta<strong>le</strong><br />
⎧<br />
− 1 |x|, se N = 1,<br />
2<br />
⎪⎨<br />
Φ(x) = − 1 log|x|, se N = 2, (4.34)<br />
2π<br />
1<br />
⎪⎩<br />
(N −2)ω N |x| N−2, se N ≥ 3,<br />
dove ω N è la misura della su<strong>per</strong>ficie della sfera unitaria in R N , data dalla (A.4).<br />
4.5 Soluzione dell’equazione del<strong>le</strong> onde in R 3 e<br />
in R 2<br />
Ricor<strong>di</strong>amo che la soluzione dell’equazione del<strong>le</strong> onde in R N , con dati <strong>di</strong> Cauchy<br />
ϕ e ψ, ha la forma<br />
( ) sinc|k|t<br />
u(x,t) = c N F ∗ (cosc|k|t)∗ϕ+c N F ∗ ∗ψ. (4.35)<br />
c|k|<br />
Per scrivere esplicitamente la soluzione dobbiamo antitrasformare <strong>le</strong> funzioni<br />
cos(c|k|t)esin(c|k|t)/c|k|, ilchepuòesserefattosolonelsensodel<strong>le</strong><strong>di</strong>stribuzioni<br />
tem<strong>per</strong>ate (è chiaro che tali funzioni non sono né L 1 né L 2 ma sono <strong>di</strong>stribuzioni<br />
tem<strong>per</strong>ate).<br />
Cominciamo col caso N = 3. Per ogni R > 0 e ϕ ∈ S(R 3 ), definiamo la<br />
<strong>di</strong>stribuzione<br />
〈Σ R ,ϕ〉 = 1<br />
4πR<br />
∫∂B(0,R)<br />
2 ϕ(x)dσ = 1 ∫ 2π<br />
4πR 2 0<br />
∫ π<br />
0<br />
˜ϕ(R,θ,φ)R 2 sinθdθdφ,<br />
dove dσ in<strong>di</strong>ca l’e<strong>le</strong>mento <strong>di</strong> suprficie. Si verifica facilmente che Σ R è una <strong>di</strong>stribuzione<br />
tem<strong>per</strong>ata; ta<strong>le</strong> <strong>di</strong>stribuzione restituisce la me<strong>di</strong>a <strong>di</strong> ϕ sulla su<strong>per</strong>ficie<br />
della sfera <strong>di</strong> centro l’origine e raggio R, in<strong>di</strong>cata con B(0,R). Vogliamo ora<br />
calcolare la trasformata <strong>di</strong> Fourier <strong>di</strong> Σ R . Si ha<br />
〈̂Σ R ,ϕ〉 = 〈Σ R , ̂ϕ〉 = 1<br />
4πR<br />
∫∂B(0,R)<br />
2 ̂ϕ(k)dσ
CAPITOLO 4. DISTRIBUZIONI 80<br />
= c ∫<br />
3<br />
4πR<br />
∫∂B(0,R)<br />
2 ϕ(x)e −ik·x dxdσ = c ∫ ∫<br />
3<br />
R 4πR 2 ϕ(x) e −ik·x dσdx<br />
3 R 3 ∂B(0,R)<br />
(notiamo che, a <strong>di</strong>fferenza <strong>di</strong> quanto fatto nel paragrafo precedente, qui si è<br />
potuto applicare <strong>di</strong>rettamente il teorema <strong>di</strong> Fubini). Calcoliamo l’integra<strong>le</strong> più<br />
interno usandoun sistema<strong>di</strong> coor<strong>di</strong>natepolaricon assepolarelungo la<strong>di</strong>rezione<br />
<strong>di</strong> x:<br />
∫<br />
∂B(0,R)<br />
e −ik·x dσ =<br />
∫ 2π ∫ π<br />
0<br />
0<br />
e −iR|x|cosθ R 2 sinθdθdφ = 4πR2<br />
R|x|<br />
sinR|x|<br />
e <strong>per</strong>ciò otteniamo<br />
〈̂Σ R ,ϕ〉 = c 3<br />
∫<br />
ϕ(x) sinR|x|<br />
R R|x|<br />
3<br />
dx<br />
e quin<strong>di</strong> ̂Σ R è la <strong>di</strong>stribuzione tem<strong>per</strong>ata regolare<br />
Invertendo la trasformazione si ottiene<br />
e dunque<br />
F ∗ ( sinc|k|t<br />
c|k|<br />
)<br />
sinR|x|<br />
̂Σ R (x) = c 3 .<br />
R|x|<br />
F ∗ ( sinR|x|<br />
R|x|<br />
)<br />
= 1 Σ R<br />
c 3<br />
( ) ( )<br />
sinc|k|t sinc|k||t|<br />
= tF ∗ = tF ∗ = t Σ c|t| ,<br />
c|k|t c|k||t| c 3<br />
che ci <strong>per</strong>mette <strong>di</strong> calcolare il secondo termine della (4.35):<br />
( ) sinc|k|t<br />
c 3 F ∗ ∗ψ = tΣ c|t| ∗ψ.<br />
c|k|<br />
Cosa significa questa formula? Si tratta della convoluzione della <strong>di</strong>stribuzione<br />
tem<strong>per</strong>ata tΣ c|t| con la funzione ψ. Ricordando la (4.26), Σ R ∗ψ è la funzione<br />
(Σ R ∗ψ)(x) = 〈Σ R ,T x Jψ〉 = 1<br />
4πR<br />
∫∂B(0,R)<br />
2 (Jψ)(y −x)dσ y<br />
= 1<br />
4πR<br />
∫∂B(0,R)<br />
2 ψ(x−y)dσ y = 1<br />
4πR<br />
∫∂B(x,R)<br />
2 ψ(y)dσ y ,<br />
ovverola me<strong>di</strong>a <strong>di</strong> ψ sulla su<strong>per</strong>ficie della sfera <strong>di</strong> raggio R e centro x. Possiamo<br />
<strong>per</strong>tanto scrivere<br />
( ) sinc|k|t<br />
c 3 F ∗ ∗ψ(x) = 1 ∫<br />
c|k| 4πc 2 ψ(y)dσ.<br />
t ∂B(x,c|t|)<br />
Per comp<strong>le</strong>tare la soluzione basta osservare che<br />
c 3 F ∗ (cosc|k|t)∗ϕ = ∂ ∂t c 3F ∗ ( sinc|k|t<br />
c|k|<br />
)<br />
∗ϕ
CAPITOLO 4. DISTRIBUZIONI 81<br />
<strong>per</strong> cui si ottiene la soluzione comp<strong>le</strong>ta<br />
(<br />
u(x,t) = ∂ ∫ )<br />
1<br />
∂t 4πc 2 ϕ(y)dσ<br />
t<br />
∂B(x,c|t|)<br />
+ 1 ∫<br />
4πc 2 ψ(y)dσ. (4.36)<br />
t ∂B(x,c|t|)<br />
Per ottenere la soluzione nel caso N = 2 utilizziamo il cosiddetto “metodo della<br />
<strong>di</strong>scesa”: siano ϕ(x 1 ,x 2 ) e ψ(x 1 ,x 2 ) i dati iniziali <strong>per</strong> il prob<strong>le</strong>ma in <strong>di</strong>mensione<br />
2 e interpretiamolicome dati <strong>per</strong> il prob<strong>le</strong>main <strong>di</strong>mensione 3, in<strong>di</strong>pendenti dalla<br />
terza coor<strong>di</strong>nata x 3 . Scriviamo quin<strong>di</strong> la soluzione (4.36): se ta<strong>le</strong> soluzione è<br />
in<strong>di</strong>pendente da x 3 , allora essa (come si può facilmente <strong>di</strong>mostrare) è soluzione<br />
del prob<strong>le</strong>ma bi<strong>di</strong>mensiona<strong>le</strong>.<br />
Con questa strategia in mente, scriviamo dunque la (4.36) <strong>per</strong> ϕ = ϕ(x 1 ,x 2 ) e<br />
ψ = ψ(x 1 ,x 2 ). Utilizzando <strong>le</strong> coor<strong>di</strong>nate polari si ha<br />
u(x,t) =<br />
(<br />
∂ t<br />
∂t 4π<br />
+ t<br />
4π<br />
∫ 2π ∫ π<br />
0 0<br />
∫ 2π ∫ π<br />
0<br />
0<br />
)<br />
ϕ(x 1 +c|t|sinθ cosφ, x 2 +c|t|sinθ sinφ) sinθdθdφ<br />
ψ(x 1 +c|t|sinθ cosφ, x 2 +c|t|sinθ sinφ) sinθdθdφ,<br />
(4.37)<br />
che è effettivamente in<strong>di</strong>pendente da x 3 e <strong>per</strong>ciò è (almeno formalmente) la<br />
soluzione dell’equazione del<strong>le</strong> onde a <strong>di</strong>mensione 2. Per esprimere la soluzione<br />
in una forma più semplice osserviamoche, al variare<strong>di</strong> θ in [0,π/2] e φ in [0,2π],<br />
<strong>le</strong> variabili {<br />
ξ1 = c|t|sinθ cosφ<br />
ξ 2 = c|t|sinθ sinφ<br />
descrivono il <strong>di</strong>sco {ξ ∈ R 2 | |ξ| ≤ c|t|} mentre, se θ varia in [0,π], lo descrivono<br />
due volte (infatti ξ 1 e ξ 2 sono <strong>le</strong> proiezioni sul <strong>di</strong>sco nel piano (x 1 ,x 2 ) dei punti<br />
descritti sulla sfera |ξ| ≤ c|t| dal<strong>le</strong> coor<strong>di</strong>nate sferiche). La matrice Jacobiana<br />
della trasformazione è<br />
( )<br />
∂(ξ 1 ,ξ 2 ) cosθ cosφ −sinθ sinφ<br />
∂(θ,φ) = c|t| cosθ sinφ sinθ cosφ,<br />
<strong>per</strong> cui<br />
det ∂(ξ 1,ξ 2 )<br />
∂(θ,φ) = (ct)2 cosθ sinθ,<br />
det ∂(θ,φ)<br />
∂(ξ 1 ,ξ 2 ) = 1<br />
(ct) 2 cosθ sinθ .<br />
Utilizzando questo cambio <strong>di</strong> variabili nella (4.37), osservando che ξ 2 1 + ξ2 2 =<br />
(ct) 2 sin 2 θ, e ricordando che il <strong>di</strong>sco unitario è <strong>per</strong>corso due volte dalla variabi<strong>le</strong><br />
ξ = (ξ 1 ,ξ 2 ), si ottiene<br />
u(x,t) = ∂ ∂t<br />
∫<br />
|ξ|≤c|t|<br />
dove, naturalmente, x = (x 1 ,x 2 ).<br />
ϕ(x+ξ) dξ<br />
√<br />
(ct) 2 −|ξ| 2 2πc<br />
∫|ξ|≤c|t|<br />
+ ψ(x+ξ) dξ<br />
√<br />
(ct) 2 −|ξ| 2 2πc , (4.38)
CAPITOLO 4. DISTRIBUZIONI 82<br />
Notiamo la <strong>di</strong>fferenza qualitativa tra la soluzione tri<strong>di</strong>mensiona<strong>le</strong> e qualla bi<strong>di</strong>mensiona<strong>le</strong>.<br />
Nel primo caso i dati iniziali si propagano lungo la su<strong>per</strong>ficie dei<br />
coni |x| = c|t|, e infatti la (4.36) <strong>di</strong>pende dall’integra<strong>le</strong> dei dati iniziali sulla su<strong>per</strong>cicie<br />
<strong>di</strong> {x ∈ R 3 | |x| = c|t|}. PerN = 2, invece, l’influenzadei dati si estende<br />
anche all’interno dei coni, e infatti la (4.38) <strong>di</strong>pende dall’integra<strong>le</strong> dei dati su<br />
tutto l’insieme {x ∈ R 2 | |x| ≤ c|t|} (la stessa cosa si può <strong>di</strong>re anche <strong>per</strong> la<br />
formula <strong>di</strong> D’A<strong>le</strong>mbert in <strong>di</strong>mensione 1 ma solo <strong>per</strong> quanto riguarda il dato ψ).<br />
Immaginiamouna <strong>per</strong>turbazione puntua<strong>le</strong> e istantanea, in un punto x all’istante<br />
t = 0, e un osservatore posto in un altro punto y. In <strong>di</strong>mensione 3 l’osservatore<br />
“sente” la <strong>per</strong>turbazione solo a quell’istante <strong>di</strong> tempo t 0 ta<strong>le</strong> che |y −x| = ct 0 ,<br />
essendo il segna<strong>le</strong> trasportato dal fronte d’onda sferico |y −x| = ct (è il cosiddetto<br />
principio <strong>di</strong> Huygens). A <strong>di</strong>mensione 2 il principio <strong>di</strong> Hyuygens non va<strong>le</strong>:<br />
l’osservatore sente la <strong>per</strong>turbazione a tutti i tempi t <strong>per</strong> cui |y −x| ≤ ct, ovvero<br />
a tutti gli istanti successivi a t 0 .<br />
La soluzione del prob<strong>le</strong>ma <strong>di</strong> Cauchy <strong>per</strong> l’equazione del<strong>le</strong> onde in R N si può<br />
ricavare esplicitamente <strong>per</strong> ogni N (cfr. ad esempio [3]) e si può vedere che il<br />
principio <strong>di</strong> Huygens va<strong>le</strong> solo <strong>per</strong> N <strong>di</strong>spari e maggiore o ugua<strong>le</strong> a 3.<br />
4.6 Distribuzione delta <strong>per</strong>io<strong>di</strong>ca<br />
Fissato T > 0, definiamo la <strong>di</strong>stribuzione<br />
δ T = ∑ m∈Zδ mT , (4.39)<br />
ovvero<br />
〈δ T ,ϕ〉 = ∑ m∈Zϕ(mT), ∀ ϕ ∈ D ′ (R).<br />
Si verifichi <strong>per</strong> esercizio che δ T è una <strong>di</strong>stribuzione tem<strong>per</strong>ata.<br />
Consideriamo ora, <strong>per</strong> ogni ϕ ∈ S(R), la <strong>per</strong>io<strong>di</strong>zzata <strong>di</strong> ϕ<br />
ϕ T (x) := ∑ m∈Zϕ(x+mT), x ∈ R. (4.40)<br />
Notiamo che ϕ T è T-<strong>per</strong>io<strong>di</strong>ca poiché<br />
ϕ T (x+T) = ∑ m∈Z<br />
ϕ(x+(m+1)T) = ∑ m∈Zϕ(x+mT) = ϕ T (x).<br />
Se supp(ϕ) ⊂ (a,a+T), <strong>per</strong> un certo a, allora ϕ T è semplicemente l’estensione<br />
<strong>per</strong>io<strong>di</strong>ca <strong>di</strong> ϕ a tutto R (notare che in questo caso un solo termine della serie<br />
che definisce ϕ T (x) è non nullo). Notiamo anche che si può esprimere ϕ T come<br />
l’azione su ϕ della traslata in x della delta <strong>per</strong>io<strong>di</strong>ca:<br />
ϕ T (x) = 〈δx T ,ϕ〉. (4.41)<br />
Poiché ϕ T è T-<strong>per</strong>io<strong>di</strong>ca, possiamo scrivere la sua serie <strong>di</strong> Fourier<br />
ϕ T (x) = ∑ n∈Zϕ T n e i 2π T nx ,
CAPITOLO 4. DISTRIBUZIONI 83<br />
dove i coefficienti <strong>di</strong> Fourier sono dati da<br />
ϕ T n = 1 T<br />
∫ T/2<br />
−T/2ϕ T (y)e −i2π T ny dy = ∑ m∈Z<br />
−∞<br />
∫<br />
1 T/2<br />
ϕ(y +mT)e −i2π T ny dy<br />
T −T/2<br />
= ∑ ∫<br />
1 T/2+mT<br />
ϕ(z)e −i2π T n(z−mT) dy = ∑ ∫<br />
1 T/2+mT<br />
T<br />
m∈Z<br />
−T/2+mT<br />
T<br />
m∈Z<br />
−T/2+mT<br />
= 1 ∫ +∞<br />
√ ( ) 2π 2πn<br />
ϕ(z)e −i2π T nz dz = ˆϕ .<br />
T<br />
T T<br />
ϕ(z)e −i 2π T nz dy<br />
Notiamo che nel caso particolare in cui supp(ϕ) ⊂ (a,a + T) si ha ϕ T n = ϕ n<br />
ovvero, come ci dovevamo aspettare, i coefficienti <strong>di</strong> Fourier della ϕ T coincidono<br />
con quelli della ϕ. La serie <strong>di</strong> Fourier della ϕ T è dunque data da<br />
ϕ T (x) = ∑ n∈Z<br />
1<br />
T<br />
∫ +∞<br />
−∞<br />
ϕ(y)e i2π T n(x−y) dy. (4.42)<br />
Confrontando questa espressione con la definizione ϕ T (x) = 〈δ T x,ϕ〉, si riconosce<br />
che la <strong>di</strong>stribuzione regolare<br />
∆ (N)<br />
x (y) := 1 T<br />
N∑<br />
n=−N<br />
e i2π T n(y−x)<br />
tende, nelsensodel<strong>le</strong> <strong>di</strong>stribuzioni, alla<strong>di</strong>stribuzioneδx T <strong>per</strong>N → ∞ (notareche<br />
lafunzione∆ (N)<br />
x (y) èsostanzialmenteilnuc<strong>le</strong>o<strong>di</strong>Dirich<strong>le</strong>t(1.8)). Inparticolare,<br />
<strong>per</strong> x = 0, si ottiene<br />
1 ∑<br />
e i2π T ny = δ T , (4.43)<br />
T<br />
n∈Z<br />
che naturalmente va intesa come limite <strong>di</strong>stribuziona<strong>le</strong> <strong>di</strong> <strong>di</strong>stribuzioni regolari<br />
(funzioni <strong>di</strong> y). Possiamo interpretare questa relazione come lo sviluppo in serie<br />
<strong>di</strong> Fourier della delta <strong>per</strong>io<strong>di</strong>ca, che è una “serie <strong>di</strong> Fourier” con coefficienti<br />
costanti (tutti uguali a 1/T).<br />
Osservazione 4.43 Utilizzando la notazione <strong>di</strong> tipo “pseudofunzione” <strong>per</strong> la<br />
delta, la (4.39) si scrive<br />
δ T (x) = ∑ m∈Zδ(x−mT)<br />
e la (4.43)<br />
Si ottiene così la formula<br />
1<br />
T<br />
1<br />
T<br />
∑<br />
∑<br />
e i2π T nx = δ T (x).<br />
n∈Z<br />
n∈Ze i2π T nx = ∑ m∈Z<br />
δ(x−mT), (4.44)<br />
dal<strong>le</strong> importanti applicazioni come, ad esempio, lo stu<strong>di</strong>o della <strong>di</strong>ffrazione a<br />
raggi X da parte dei cristalli.
CAPITOLO 4. DISTRIBUZIONI 84<br />
Osservazione 4.44 Usando (4.15), (4.41) e (4.43), la trasformata <strong>di</strong> Fourier<br />
della <strong>di</strong>stribuzione tem<strong>per</strong>ata δ T è data da<br />
̂δ T = ∑ ̂δ mT = 1<br />
√<br />
∑ 2π<br />
√ e −imTx =<br />
m∈Z 2π T δ2π/T .<br />
m∈Z
Capitolo 5<br />
Semigruppi <strong>di</strong> o<strong>per</strong>atori e<br />
prob<strong>le</strong>mi <strong>di</strong> evoluzione<br />
5.1 Semigruppi <strong>di</strong> o<strong>per</strong>atori<br />
Definizione 5.1 Sia X uno spazio <strong>di</strong> Banach e A : X → X un’applicazione<br />
lineare (più comunemente detta “o<strong>per</strong>atore” lineare). L’o<strong>per</strong>atore A si <strong>di</strong>ce<br />
limitato se esiste M ≥ 0 ta<strong>le</strong> che<br />
‖Au‖ X<br />
≤ M ‖u‖ X<br />
, u ∈ X. (5.1)<br />
Lo spazio vettoria<strong>le</strong> degli o<strong>per</strong>atori lineari e limitati su X si in<strong>di</strong>ca con B(X).<br />
La seguente Proposizione ci <strong>di</strong>ce che la limitatezza è equiva<strong>le</strong>nte alla continuità.<br />
Proposizione 5.2 Sia X uno spazio <strong>di</strong> Banach e A : X → X un o<strong>per</strong>atore<br />
lineare. Le seguenti proprietà sono equiva<strong>le</strong>nti:<br />
(a) A ∈ B(X);<br />
(b) A è continuo;<br />
(c) A è continuo in un punto u 0 ∈ X.<br />
Dimostrazione Le implicazioni (a) ⇒ (b) e (b) ⇒ (c) sono evidenti; <strong>di</strong>mostriamo<br />
quin<strong>di</strong> che (c) ⇒ (a).<br />
Se <strong>per</strong> assurdo A /∈ B(X), allora <strong>per</strong> ogni M ≥ 0 esiste u ∈ X ta<strong>le</strong> che<br />
‖Au‖ > M‖u‖ Quin<strong>di</strong> è possibi<strong>le</strong> costruire una successione u n ∈ X ta<strong>le</strong> che<br />
‖Au n ‖ > n‖u n ‖, ∀ n ∈ N.<br />
Posto<br />
si avrebbe quin<strong>di</strong><br />
w n = u n<br />
n‖u n ‖ +u 0<br />
‖w n −u 0 ‖ = 1 n ,<br />
‖Aw n −Au 0 ‖ = Au n<br />
n‖u n ‖ > 1<br />
85
CAPITOLO 5. SEMIGRUPPI 86<br />
e quin<strong>di</strong> <strong>per</strong> n → ∞ si avrebbe w n → u 0 ma Aw n ↛ A 0 , contrad<strong>di</strong>cendo la<br />
continuità <strong>di</strong> A in u 0 .<br />
□<br />
Definizione 5.3 Se A ∈ B(X) si definisce<br />
‖A‖ B(X)<br />
= inf{M ≥ 0 | ‖Au‖ X<br />
≤ M ‖u‖ X<br />
, ∀u ∈ X}. (5.2)<br />
Si <strong>di</strong>mostra facilmente che ‖Au‖ B(X) è una norma su B(X). Notiamo che <strong>per</strong><br />
ogni u ∈ X va<strong>le</strong> la <strong>di</strong>suguaglianza<br />
che scriveremo più brevemente<br />
‖Au‖ X<br />
≤ ‖A‖ B(X)<br />
‖u‖ X<br />
, (5.3)<br />
‖Au‖ ≤ ‖A‖‖u‖<br />
qualora non ci sia possibilità <strong>di</strong> equivoco. Dalla continuità <strong>di</strong> A ∈ B(X) e dal<br />
fatto che X è comp<strong>le</strong>to segue che B(X) (con la norma ‖·‖ B(X)<br />
) è uno spazio<br />
<strong>di</strong> Banach. In realtà si può <strong>di</strong>re qualcosa <strong>di</strong> più poiché B(X) è un’algebra (non<br />
commutativa) rispetto all’o<strong>per</strong>azione <strong>di</strong> composizione<br />
(A◦B)u = A(Bu), A,B ∈ B(X), u ∈ X (5.4)<br />
(che d’ora in poi denoteremo semplicemente con AB). L’algebra ha un’unità<br />
che è l’o<strong>per</strong>atore identità I ∈ B(X), definito da<br />
Iu = u ∀u ∈ X.<br />
Se A,B ∈ B(X), si vede facilmente (esercizio) che<br />
‖AB‖ ≤ ‖A‖‖B‖, (5.5)<br />
il che implica che l’o<strong>per</strong>azione<strong>di</strong> composizione è continuain B(X). Si <strong>di</strong>ce allora<br />
che B(X) è un’algebra <strong>di</strong> Banach (con unità). 1<br />
Definizione 5.4 Sia X uno spazio <strong>di</strong> Banach e R + = [0,+∞). Un semigruppo<br />
fortemente continuo (o C 0 -semigruppo) su X è un’applicazione S : R + → B(X)<br />
ta<strong>le</strong> che<br />
1) S(0) = I;<br />
2) S(t+s) = S(t)S(s), <strong>per</strong> ogni t,s ≥ 0;<br />
3) lim t→0 + ‖S(t)u−u‖ X<br />
= 0, <strong>per</strong> ogni u ∈ X.<br />
1 A <strong>di</strong>mensione finita (X = C N ) tutti gli o<strong>per</strong>atori lineari sono limitati e B(X) è l’algebra<br />
del<strong>le</strong> matrici N ×N.
CAPITOLO 5. SEMIGRUPPI 87<br />
Notiamo che si tratta <strong>di</strong> un omomorfismo del semigruppo con unità (R + ,+) nel<br />
semigruppo con unità (B(X),◦). Il semigruppo (B(X),◦) non è commutativo,<br />
ma il sotto-semigruppo {S(t) | t ≥ 0}, immagine <strong>di</strong> (R + ,+) tramite S, lo è. La<br />
proprietà 3 è quella che si chiama continuità forte. Notiamo che la continuità<br />
forte è più debo<strong>le</strong> della continuità nella norma B(X), ovvero<br />
lim<br />
t→0 +‖S(t)−I‖ B(X) = 0,<br />
che è detta continuità uniforme <strong>di</strong> S(t).<br />
Proposizione 5.5 Se S è un C 0 -semigruppo, allora esistono M ≥ 0 e ω ∈ R<br />
tali che<br />
‖S(t)‖ ≤ M e ωt (5.6)<br />
<strong>per</strong> ogni t ≥ 0.<br />
Omettiamo la <strong>di</strong>mostrazione della proposizione 5.5. Dimostriamo invece il risultato<br />
successivo: la continuità forte in t = 0 (proprietà 3) implica la continuità<br />
forte a ogni t ≥ 0.<br />
Proposizione 5.6 Se S è un C 0 -semigruppo e t 0 > 0, allora<br />
<strong>per</strong> ogni u ∈ X.<br />
lim ‖S(t)u−S(t 0 )u‖<br />
t→t X<br />
= 0<br />
0<br />
Dimostrazione Per ogni u ∈ X, usando <strong>le</strong> proprietà 1-3, possiamo scrivere<br />
lim<br />
h→0 +‖S(t 0 +h)u−S(t 0 )u‖ = lim<br />
h→0 +‖S(h)S(t 0)u−S(t 0 )u‖ = 0<br />
e inoltre (usando anche la proposizione precedente)<br />
lim<br />
h→0 + ‖S(t 0 −h)u−S(t 0 )u‖ = lim<br />
h→0 + ‖S(t 0 −h)(S(h)u−u)‖<br />
≤ lim<br />
h→0 +Me(t0−h)ω ‖S(h)u−u‖ = 0.<br />
Abbiamo <strong>per</strong>ciò <strong>di</strong>mostrato la continuità forte da destra e da sinistra in t 0 . □<br />
Definizione 5.7 Sia X uno spazio <strong>di</strong> Banach. Un gruppo fortemente continuo<br />
(o C 0 -gruppo) su X è un’applicazione S : R → B(X) ta<strong>le</strong> che<br />
1) S(0) = I;<br />
2) S(t+s) = S(t)S(s), <strong>per</strong> ogni t,s ∈ R;<br />
3) lim t→0 ‖S(t)u−u‖ X<br />
= 0, <strong>per</strong> ogni u ∈ X.<br />
Si tratta <strong>per</strong>ciò <strong>di</strong> un omomorfismodel gruppo (R,+) nel gruppo degli o<strong>per</strong>atori<br />
limitati invertibili. 2 Osserviamo che S(−t) = S(t) −1 . È imme<strong>di</strong>ato convincersi<br />
che la restrizione <strong>di</strong> un C 0 -gruppo alla semiretta R + è un C 0 -semigruppo.<br />
2 Un o<strong>per</strong>atore A ∈ B(X) si <strong>di</strong>ce invertibi<strong>le</strong> se esiste B ∈ B(X) ta<strong>le</strong> che AB = BA = I.<br />
Ta<strong>le</strong> B è detto inverso <strong>di</strong> A e viene denotato con A −1 .
CAPITOLO 5. SEMIGRUPPI 88<br />
5.2 Gruppo generato da un o<strong>per</strong>atore limitato<br />
Teorema 5.8 Sia X uno spazio <strong>di</strong> Banach e A ∈ B(X). Posto<br />
S(t) :=<br />
∞∑<br />
k=0<br />
t k<br />
k! Ak , t ∈ R, (5.7)<br />
risulta che S : R → B(X) è un gruppo uniformemente continuo, cioè<br />
lim ‖S(t)−I‖<br />
t→0<br />
B(X)<br />
= 0. (5.8)<br />
Dimostrazione La serie ∑ ∞<br />
k=0 tk<br />
k! Ak converge totalmente in B(X), <strong>di</strong>fatti:<br />
∞∑<br />
∥ ∥ tk ∥∥ ∑<br />
∞<br />
k! Ak ≤<br />
k=0<br />
k=0<br />
|t| k<br />
k!<br />
‖A‖ k = e |t|‖A‖<br />
e dunque S(t) ∈ B(X) <strong>per</strong> ogni t ∈ R. Dimostriamo che valgono <strong>le</strong> proprietà <strong>di</strong><br />
gruppo S(0) = I e S(t+s) = S(t)S(s), t,s ∈ R.<br />
La prima proprietà è evidente in quanto <strong>per</strong> t = 0 la serie che definisce S si<br />
riduce al primo termine.<br />
Per <strong>di</strong>mostrare la seconda proprietà in<strong>di</strong>chiamo con S n (t) la somma parzia<strong>le</strong><br />
fino al termine n-esimo. Si ha<br />
n∑ (t+s) k n∑ k∑<br />
( k t<br />
S n (t+s) = A k =<br />
k! r) r s k−r<br />
A k =<br />
k!<br />
n∑<br />
r=0 k=r<br />
k=0<br />
n∑<br />
( k t<br />
r) r s k−r<br />
A k =<br />
k!<br />
e, d’altra parte,<br />
k=0 r=0<br />
n∑<br />
n−r<br />
∑<br />
( ) l+r t r s l<br />
r (l+r)! Al+r =<br />
r=0 l=0<br />
S n (t)S n (s) =<br />
n∑<br />
n∑<br />
r=0 l=0<br />
<strong>per</strong> cui la <strong>di</strong>fferenza fra S n (t)S n (s) e S n (t+s) è<br />
S n (t)S n (s)−S n (t+s) =<br />
=<br />
n∑<br />
n+r<br />
∑<br />
r=1 k=n+1<br />
n∑<br />
n∑<br />
r=1 l=n−r+1<br />
t r s k−r<br />
r!(k −r)! Ak =<br />
t r sl<br />
Ar<br />
r! l! Al ,<br />
t r sl<br />
Ar<br />
r! l! Al =<br />
2n∑<br />
n∑<br />
k=n+1 r=k−n<br />
n∑<br />
n∑<br />
n−r<br />
∑<br />
r=0 l=0<br />
n∑<br />
r=1 l=n−r+1<br />
t r s k−r<br />
r!(k −r)! Ak ,<br />
t r sl<br />
Ar<br />
r! l! Al<br />
t r s l<br />
r!l! A(r+l)<br />
dove la vali<strong>di</strong>tà dell’ultima uguaglianza si può facilmente verificare nella figura<br />
5.1. Dunque<br />
≤<br />
2n∑<br />
k∑<br />
k=n+1 r=0<br />
‖S n (t)S n (s)−S n (t+s)‖ ≤<br />
|t| r |s| k−r<br />
r!(k −r)! ‖A‖k =<br />
2n∑<br />
k=n+1<br />
2n∑<br />
n∑<br />
k=n+1 r=k−n<br />
(|t|+|s|) k<br />
‖A‖ k ≤<br />
k!<br />
|t| r |s| k−r<br />
r!(k −r)! ‖A‖k<br />
∞∑<br />
k=n+1<br />
(|t|+|s|) k<br />
‖A‖ k .<br />
k!
CAPITOLO 5. SEMIGRUPPI 89<br />
k<br />
2n<br />
k = n+r<br />
n+1<br />
1 n<br />
r<br />
Figura 5.1: La somma ∑ n<br />
∑ n+r<br />
r=1 k=n+1<br />
corrisponde ai punti racchiusi dal triangolo<br />
ombreggiato. Fissando prima k e facedo variare r è faci<strong>le</strong> verificare che ta<strong>le</strong> somma è<br />
equiva<strong>le</strong>nte a ∑ 2n n<br />
k=n+1∑<br />
r=k−n .<br />
L’ultimo termine della <strong>di</strong>suguaglianza, che è il resto <strong>di</strong> una serie esponenzia<strong>le</strong>,<br />
tende a zero <strong>per</strong> n → ∞, il che <strong>di</strong>mostra S(t+s) = S(t)S(s).<br />
Dimostriamo ora la (5.8). Per t → 0 si ha<br />
‖S(t)−I‖ =<br />
∥<br />
∞∑<br />
k=1<br />
Dunque, <strong>per</strong> ogni u ∈ X si ha<br />
t k ∥ ∥∥<br />
∑ ∞<br />
k! Ak ≤<br />
k=1<br />
|t| k<br />
k!<br />
‖A‖ k = e |t|‖A‖ −1 → 0,<br />
‖S(t)u−u‖ = ‖(S(t)−I)u‖ ≤ ‖S(t)−I‖‖u‖ → 0<br />
<strong>per</strong> t → 0.<br />
□<br />
Il gruppo S(t) che abbiamo appena costruito, si <strong>di</strong>ce generato da A. Si tratta <strong>di</strong><br />
un gruppo uniformemente continuo e quin<strong>di</strong>, come giàosservato, è in particolare<br />
un C 0 -gruppo.<br />
Teorema 5.9 Sia A ∈ B(X) e sia S(t) il gruppo generato da A. Per ogni<br />
u 0 ∈ X, la funzione u : R → X,<br />
u(t) := S(t)u 0 , t ∈ R,<br />
è derivabi<strong>le</strong> e sod<strong>di</strong>sfa il “prob<strong>le</strong>ma <strong>di</strong> Cauchy”<br />
⎧<br />
⎪⎨<br />
d<br />
u(t) = Au(t), t ∈ R,<br />
dt<br />
⎪⎩<br />
u(0) = u 0 .<br />
(5.9)<br />
Dimostrazione Consideriamo la serie del<strong>le</strong> derivate<br />
d t k<br />
dt k! Ak = tk−1<br />
(k −1)! Ak = A tk−1<br />
(k −1)! Ak−1 .
CAPITOLO 5. SEMIGRUPPI 90<br />
Poiché<br />
∥<br />
∥A tk−1<br />
(k −1)! Ak−1 ∥ ∥∥ ≤ ‖A‖<br />
|t| k−1<br />
(k −1)! ‖A‖k−1<br />
si ha che la serie del<strong>le</strong> derivate è totalmente convergente in B(X) e che questa<br />
convergenzaèuniforme rispetto a t in intervalli limitati. Poichéva<strong>le</strong> un teorema<br />
<strong>di</strong> derivazione termine a termine negli spazi <strong>di</strong> Banach <strong>per</strong> serie uniformemente<br />
totalmente convergenti (la <strong>di</strong>mostrazione è identica a quella <strong>per</strong> <strong>le</strong> funzioni a<br />
valori reali), si avrà che S : R → B(X) è derivabi<strong>le</strong>, con<br />
d<br />
∞<br />
dt S(t) = ∑ d t k<br />
dt k! Ak = A<br />
k=0<br />
∞∑<br />
k=1<br />
t k−1<br />
(k −1)! Ak−1 = AS(t) = S(t)A.<br />
Ora, <strong>per</strong> h → 0, si ha<br />
∥[ ] ∥ u(t+h)−u(t)<br />
∥∥∥<br />
∥ −Au(t)<br />
S(t+h)−S(t) ∥∥∥<br />
h ∥ = −AS(t) u 0<br />
h<br />
≤<br />
S(t+h)−S(t)<br />
∥ −AS(t)<br />
h ∥ ‖u 0‖ → 0<br />
e dunque u : R → X è derivabi<strong>le</strong> con d dt u(t) = Au(t). Inoltre u(0) = S(0)u 0 =<br />
Iu 0 = u 0 . Dunque u(t) è soluzione <strong>di</strong> (5.9) (osserviamo che u ∈ C 1 (R,X)). □<br />
Per <strong>le</strong> evidenti analogie con la funzione esponenzia<strong>le</strong>, il gruppo generato da<br />
A ∈ B(X) si in<strong>di</strong>ca con e tA .<br />
Esercizio 5.10 Un esempio con X = C 2 . Sia (α 1 ,α 2 ,α 3 ) ∈ R 3 e sia<br />
( )<br />
α3 α<br />
A = 1 −iα 2<br />
.<br />
α 1 +iα 2 −α 3<br />
Calcolare e tA .<br />
5.3 Cenni sul caso del generatore non-limitato<br />
Su uno spazio <strong>di</strong> Banach X possono agire o<strong>per</strong>atori lineari che non sono limitati<br />
(se X ha <strong>di</strong>mensione finita, <strong>per</strong>ò, tutti gli o<strong>per</strong>atori lineari sono limitati). In<br />
genera<strong>le</strong>, un o<strong>per</strong>atore lineare in uno spazio <strong>di</strong> Banach X è un’applicazione<br />
lineareA : D(A) → X, doveD(A) èun sottospaziolineare<strong>di</strong>X detto dominio <strong>di</strong><br />
A. Adesempio,glio<strong>per</strong>atori<strong>di</strong>tipo<strong>di</strong>fferenzia<strong>le</strong>sonogeneralmentenon-limitati,<br />
come mostra il seguente esempio.<br />
Esempio 5.11 Sia X = C([−1,1]) (con la norma del sup) e poniamo<br />
Au := u ′ , ∀ u ∈ D(A) := C 1 ([−1,1])<br />
Dimostriamo che ta<strong>le</strong> o<strong>per</strong>atore non è limitato, cioè non esiste alcun M ≥ 0<br />
ta<strong>le</strong> che ‖Au‖ ∞<br />
≤ M‖u‖ ∞<br />
<strong>per</strong> ogni u ∈ D(A). Consideriamo la successione<br />
u n ∈ D(A)<br />
u n (x) = √ x 2 +1/n,
CAPITOLO 5. SEMIGRUPPI 91<br />
È faci<strong>le</strong> verificare che u n (x) → |x| uniformemente (cioè nella norma <strong>di</strong> X). Se<br />
A fosse limitato allora Au n = u ′ n sarebbe una successione <strong>di</strong> Cauchy in X e<br />
quin<strong>di</strong> convergerebbe uniformemente a una funzione continua, mentre il limite<br />
<strong>di</strong> u ′ n (x) è una funzione <strong>di</strong>scontinua.<br />
Nel<strong>le</strong> applicazioni, il caso del generatore A non limitato è ben più tipico <strong>di</strong><br />
quello del generatore limitato. I prob<strong>le</strong>mi visti negli esempi (trasporto, calore,<br />
onde) hanno tutti generatorinon limitati. Vogliamo oramostrare, senza pretesa<br />
<strong>di</strong> essere esaurienti, come la teoria esposta nel paragrafo precedente può essere<br />
estesa a questo caso più genera<strong>le</strong> e più significativo.<br />
Ricor<strong>di</strong>amo che <strong>per</strong> il gruppo generato da un o<strong>per</strong>atore limitato A ∈ B(X)<br />
abbiamo <strong>di</strong>mostrato che d dt etA u = Ae tA u, <strong>per</strong> cui<br />
Au = d dt etA u∣ .<br />
t=0<br />
Questa osservazione motiva la seguente definizione.<br />
Definizione 5.12 Sia X uno spazio <strong>di</strong> Banach e S : R + → B(X) un C 0 -<br />
semigruppo. Definiamo il seguente o<strong>per</strong>atore lineare:<br />
{<br />
}<br />
D(A) := u ∈ X<br />
∣ lim S(t)u−u<br />
esiste in X ,<br />
t→0 + t<br />
(5.10)<br />
S(t)u−u<br />
Au := lim , u ∈ D(A).<br />
t→0 + t<br />
Ta<strong>le</strong> o<strong>per</strong>atore è detto generatore (infinitesimo) <strong>di</strong> S.<br />
Si può <strong>di</strong>mostare che un semigruppo S(t) è comp<strong>le</strong>tamente identificato dal generatore<br />
cioè che, se due C 0 -semigruppi S 1 ed S 2 hanno lo stesso generatore A,<br />
allora S 1 ≡ S 2 .<br />
Se ilgeneratoreA èun o<strong>per</strong>atorelimitato, allorarisultacheS puòessereestesoa<br />
un gruppo, che èproprioil gruppoe tA definitodallaserieesponenzia<strong>le</strong>(5.7). Nel<br />
caso più genera<strong>le</strong>, poiché il semigruppo è identificato dal generatore, possiamo<br />
continuare ad adottare la scrittura e tA (con t ≥ 0), tenendo <strong>per</strong>ò presente che,<br />
in genera<strong>le</strong>, non va<strong>le</strong> lo sviluppo in serie esponenzia<strong>le</strong>, né si può estendere il<br />
semigruppo a un gruppo.<br />
Il col<strong>le</strong>gamento fra questi concetti e il prob<strong>le</strong>ma <strong>di</strong> evoluzione è fornito dalla<br />
seguente generalizzazione del Teorema 5.9 (<strong>per</strong> la <strong>di</strong>mostrazione si può trovare<br />
in [22, 23, 24].<br />
Teorema 5.13 Sia A : D(A) → X generatore <strong>di</strong> un C 0 -semigruppo e tA . Per<br />
ogni u 0 ∈ D(A), si ha<br />
e tA u 0 ∈ D(A),<br />
d<br />
dt etA u 0 = Ae tA u 0 = e tA Au 0 , (5.11)
CAPITOLO 5. SEMIGRUPPI 92<br />
e dunque la funzione u : R + → X, u(t) := e tA u 0 , t ≥ 0, è soluzione (regolare)<br />
del prob<strong>le</strong>ma <strong>di</strong> Cauchy<br />
⎧<br />
⎪⎨<br />
d<br />
u(t) = Au(t), t > 0,<br />
dt (5.12)<br />
⎪⎩<br />
u(0) = u 0 ∈ D(A).<br />
Osservazione 5.14 Se u 0 /∈ D(A), la funzione u(t) = e tA u 0 , ha ancora senso<br />
(poiché e tA è un o<strong>per</strong>atore limitato che agisce su qualsiasi u 0 ∈ X) ma non è<br />
soluzione in senso stretto del prob<strong>le</strong>ma <strong>di</strong> evoluzione (5.12) (poiché non è detto<br />
che valgano <strong>le</strong> proprietà (5.11)). Essa è detta soluzione “mild” del prob<strong>le</strong>ma<br />
(5.12).<br />
Osservazione 5.15 Eventuali con<strong>di</strong>zioni al contorno lineari sono incorporate<br />
nella definizione del dominio D(A). Consideriamo ad esempio il seguente<br />
prob<strong>le</strong>ma <strong>di</strong> <strong>di</strong>ffusione uni<strong>di</strong>mensiona<strong>le</strong> con con<strong>di</strong>zioni al bordo <strong>di</strong> Dirich<strong>le</strong>t:<br />
⎧<br />
u t (x,t) = u xx (x,t), x ∈ (0,1), t > 0,<br />
⎪⎨<br />
u(0,t) = u(1,t) = 0, t ≥ 0,<br />
⎪⎩<br />
u(x,0) = u 0 (x), x ∈ [0,1].<br />
Il prob<strong>le</strong>ma <strong>di</strong> Cauchy ad esso associato, ambientato <strong>per</strong> esempio nello spazio<br />
<strong>di</strong> Banach X = C([0,1]), è del tipo (5.12), con<br />
D(A) := { u ∈ C 2 ([0,1]) | u(0) = u(1) = 0 }<br />
Au := u ′′ ,<br />
u ∈ D(A).<br />
Se u 0 ∈ D(A) e A genera semigruppo allora, come abbiamo detto, la soluzione<br />
u(t) sta in D(A) <strong>per</strong> ogni t ≥ 0 e quin<strong>di</strong>, in particolare, sod<strong>di</strong>sfa <strong>le</strong> con<strong>di</strong>zioni<br />
al contorno.<br />
Esiste un teorema fondamenta<strong>le</strong>, il Teorema <strong>di</strong> Hil<strong>le</strong> e Yosida, che fornisce<br />
un insieme <strong>di</strong> con<strong>di</strong>zioni necessario e sufficiente affinché un o<strong>per</strong>atore lineare<br />
A : D(A) → X sia generatore <strong>di</strong> un C 0 -semigruppo e tA . Nella pratica applicativa<br />
il punto <strong>di</strong> partenza è il prob<strong>le</strong>ma <strong>di</strong> evoluzione, rappresentato dall’o<strong>per</strong>atore<br />
A, e l’analisi del prob<strong>le</strong>ma consiste nel <strong>di</strong>mostrare che A è generatore <strong>di</strong> semigruppo<br />
e, possibilmente, costruire il semigruppo stesso (ovvero la soluzione).<br />
Nel caso <strong>di</strong> A limitato la situazione è molto semplice: A genera un gruppo la<br />
cui costruzione esplicita è fornita dalla serie esponenzia<strong>le</strong> (5.7). Nel caso <strong>di</strong> A<br />
non limitato, possiamo applicare il Teorema <strong>di</strong> Hil<strong>le</strong> e Yosida <strong>per</strong> <strong>di</strong>mostrare<br />
che A è un generatore, e quin<strong>di</strong> che il prob<strong>le</strong>ma <strong>di</strong> evoluzione è ben posto. Tuttavia<br />
possiamo ancora chiederci: esiste una formula costruttiva in questo caso?<br />
La serie esponenzia<strong>le</strong> non ha più senso (se non in circostanze molto particolari);<br />
basti pensare che <strong>le</strong> potenze <strong>di</strong> A non sono in genera<strong>le</strong> ben definite. Ma<br />
pensiamo <strong>per</strong> un attimo alla semplice funzione esponenzia<strong>le</strong> comp<strong>le</strong>ssa e ta , con
CAPITOLO 5. SEMIGRUPPI 93<br />
a ∈ C. Sappiamo bene che essa può essere rappresentata sia in termini <strong>di</strong> serie<br />
esponenzia<strong>le</strong>, sia come limite<br />
(<br />
e ta = lim 1− ta ) −n<br />
.<br />
n→+∞ n<br />
Questa rappresentazione risulta essere la chiave <strong>per</strong> costruire il semigruppo<br />
con generatore non limitato: si tratta <strong>di</strong> dare un senso alla corrispondente<br />
espressione in cui a è sostituito dall’o<strong>per</strong>atore A, ovvero<br />
(<br />
e tA = lim I − t ) −n<br />
n→+∞ n A , t ≥ 0, (5.13)<br />
dove ( I − t n A) −n<br />
può essere naturalmente interpretato come<br />
[ (I<br />
−<br />
t<br />
n A) −1 ] n<br />
.<br />
Basta ora scrivere<br />
(<br />
I − t ) [ −1 t<br />
( n<br />
) ] −1<br />
n A =<br />
n t I −A = n ( n<br />
) −1<br />
t t I −A<br />
<strong>per</strong> rendersi conto che l’espressione (5.13) ha senso se n tI −A è invertibi<strong>le</strong> e<br />
( n<br />
t I −A ) −1<br />
∈ B(X),<br />
almeno da un certo n in poi.<br />
Definizione 5.16 Sia A : D(A) ⊂ X → X un o<strong>per</strong>atore lineare. Definiamo<br />
insieme risolvente <strong>di</strong> A il sottoinsieme <strong>di</strong> C<br />
{<br />
}<br />
ρ(A) = λ ∈ C∣ λI −A è invertibi<strong>le</strong> e (λI −A) −1 ∈ B(X) .<br />
Se λ ∈ ρ(A), l’o<strong>per</strong>atore imitato R(λ) = (λI −A) −1 è detto o<strong>per</strong>atorerisolvente<br />
<strong>di</strong> A. L’insieme σ(A) = C\ρ(A) è detto spettro <strong>di</strong> A.<br />
L’analisi dell’insieme risolvente <strong>di</strong>venta quin<strong>di</strong> un ingre<strong>di</strong>ente fondamenta<strong>le</strong> <strong>per</strong><br />
<strong>di</strong>mostrare la vali<strong>di</strong>tà della formula (5.13) e quin<strong>di</strong> la generazione<strong>di</strong> semigruppo<br />
da parte <strong>di</strong> A. In particolare, una del<strong>le</strong> con<strong>di</strong>zioni del Teorema <strong>di</strong> Hil<strong>le</strong>-Yosida<br />
è che ρ(A) contenga una semiretta rea<strong>le</strong> del tipo (ω,+∞) <strong>per</strong> cui, <strong>per</strong> ogni<br />
t ≥ 0, esisterà n t ta<strong>le</strong> che n/t ⊂ ρ(A) <strong>per</strong> ogni n ≥ n t e, <strong>di</strong> conseguenza,<br />
( n<br />
t I −A) −1<br />
∈ B(X).<br />
3<br />
Esempio 5.17 Cerchiamo l’insieme risolvente dell’o<strong>per</strong>atore Laplaciano ∆ sullo<br />
spazio L 2 (R N ), con dominio<br />
D(∆) = H 2 = { u ∈ L 2 (R N )| ∇ α u ∈ L 2 (R N ), ∀ |α| ≤ 2 } (5.14)<br />
(dove ∇ in<strong>di</strong>ca il gra<strong>di</strong>ente <strong>di</strong>stribuziona<strong>le</strong>).<br />
3 Affinché A generi un gruppo, occorrerà che esistano due numeri reali ω + e ω − tali che<br />
(−∞,ω − )∪(ω + ,+∞) ⊂ ρ(A).
CAPITOLO 5. SEMIGRUPPI 94<br />
Come prima cosa osserviamo che, usando la (4.22), il dominio <strong>di</strong> ∆ può essere<br />
caratterizzato anche in termini <strong>di</strong> trasformate <strong>di</strong> Fourier:<br />
D(∆) = { u ∈ L 2 (R N )| k α û ∈ L 2 (R N ), ∀ |α| ≤ 2 } .<br />
Analizzarel’insiemerisolventesignifica<strong>di</strong>scuterel’invertibiliàdell’o<strong>per</strong>atoreλI−<br />
∆ e <strong>le</strong> proprietà dell’o<strong>per</strong>atore inverso. Consideriamo quin<strong>di</strong> l’equazione<br />
(λI −∆)u = g, (5.15)<br />
dove g ∈ L 2 (R N ) è fissato e, affinché l’equazione stessa abbia senso, la soluzione<br />
u va cercata in D(∆). In trasformata <strong>di</strong> Fourier l’equazione <strong>di</strong>venta<br />
che ha soluzione forma<strong>le</strong><br />
(λ+|k| 2 )û(k) = ĝ(k),<br />
û(k) = ĝ(k)<br />
2. (5.16)<br />
λ+|k|<br />
Si tratta ora <strong>di</strong> vedere quand’è che questa formula fornisce effettivamente (l’espressione<br />
in trasformata <strong>di</strong> Fourier de) la soluzione del prob<strong>le</strong>ma (5.15). Osserviamo<br />
che se λ è rea<strong>le</strong> negativo o nullo, ha una singolarità in |k| 2 = −λ<br />
1<br />
λ+|k| 2<br />
ed è faci<strong>le</strong> produrre esempi <strong>di</strong> funzioni g ∈ L 2 (R N ĝ(k)<br />
) tali che /∈ L 2 (R N ).<br />
λ+|k| 2<br />
Poiché la solubilità dell’equazione (5.15) <strong>per</strong> ogni funzione g in L 2 (R N ) è con<strong>di</strong>zione<br />
necessaria affinché (λI − ∆) −1 ∈ B ( L 2 (R N ) ) , possiamo affermare che<br />
(−∞,0] ⊄ ρ(∆) (ovvero (−∞,0] ⊂ σ(∆)). Se invece λ ∉ (−∞,0], chiaramente<br />
esiste una costante C > 0 ta<strong>le</strong> che<br />
∣ k α ∣∣∣∣ ∣λ+|k| 2 < C,<br />
<strong>per</strong> ogni multi-in<strong>di</strong>ce α con |α| ≤ 2. Dunque la funzione u la cui trasformata <strong>di</strong><br />
Fourier è definita dalla (5.16) appartiene a D(∆) e possiamo <strong>di</strong>re che<br />
Inoltre,<br />
‖u‖ 2 2 = ‖û‖2 2 = ∫<br />
u = (λI −∆) −1 g.<br />
R N |ĝ(k)| 2<br />
|λ+|k| 2 | 2dk ≤ C2 ‖g‖ 2 2 ,<br />
il che <strong>di</strong>mostra che (λI −∆) −1 ∈ B ( L 2 (R N ) ) , e possiamo concludere che λ ∈<br />
ρ(∆). In definitiva, abbiamo <strong>di</strong>mostrato che<br />
ρ(∆) = C\(−∞,0].<br />
Esempio 5.18 Ripren<strong>di</strong>amo il precedente esempio e <strong>di</strong>mostriamo che ∆ è il<br />
generatore del semigruppo del calore<br />
∫<br />
1<br />
[S(t)u](x) = e −|x−y|2 /4t u(y)dy<br />
(4πt) N/2 R N
CAPITOLO 5. SEMIGRUPPI 95<br />
(cfr. (3.33)). Dobbiamo <strong>di</strong>mostrare che il limite<br />
S(t)u−u<br />
lim<br />
t→0 + t<br />
esiste (in L 2 (R N )) se e solo se u ∈ D(∆), e che ta<strong>le</strong> limite è ugua<strong>le</strong> a ∆u.<br />
Conviene anche in questo caso guardare <strong>le</strong> cose attraverso la trasformazione <strong>di</strong><br />
Fourier, <strong>per</strong> cui si ha<br />
( ) (<br />
S(t)u−u e −t|k|2 −1<br />
F −∆u (k) = +|k|<br />
)û(k).<br />
2<br />
t<br />
t<br />
Osservando che<br />
e −t|k|2 = 1−t|k| 2 +R 1 (t)<br />
e ricordando l’espressione del resto n-esimo nello sviluppo <strong>di</strong> Taylor in t 0 <strong>di</strong> una<br />
funzione f(t) <strong>di</strong> classe C n+1 in un intorno <strong>di</strong> t 0 ,<br />
R n (t) = 1 n!<br />
∫ t<br />
potremo scrivere<br />
∣ e −t|k|2 −1 ∣∣∣∣ +|k| 2 = 1 ∣ t t |R 1(t)| = 1 t<br />
e, <strong>per</strong>tanto,<br />
t 0<br />
(t−τ) n f (n+1) (τ)dτ,<br />
∫ t<br />
0<br />
(t−τ)|k| 4 e −t|k|2 dτ<br />
∫ t<br />
≤ |k| 4 e −t|k|2 dτ = |k| 2 (1−e −t|k|2 ) ≤ |k| 2<br />
0<br />
∫R N ∣ ∣∣∣∣<br />
(<br />
e −t|k|2 −1<br />
t<br />
2 ∫ ∣ +|k|<br />
)û(k)<br />
2 ∣∣|k|2û(k)<br />
dk ≤ ∣ 2 dk.<br />
∣ R N<br />
Questa <strong>di</strong>suguaglianza ci <strong>per</strong>mette <strong>di</strong> utilizzare il Teorema della convergenza<br />
dominata <strong>per</strong> concludere che, se u ∈ D(∆),<br />
∥ ∥∥∥ S(t)u−u<br />
lim −∆u<br />
t→0 + t ∥ = 0.<br />
2<br />
Viceversa, supponiamo che esista in L 2 (R N ) il limite<br />
e −t|k|2 −1<br />
ˆv = lim û.<br />
t→0 + t<br />
Poiché d’altra parte lim t→0 + e−t|k|2 −1<br />
t<br />
û(k) = −|k| 2 û(k) (puntualmente), i risultati<br />
standard sugli spazi L p (si veda ad esempio [6]) ci <strong>di</strong>cono che ˆv(k) =<br />
−|k| 2 û(k) quasi ovunque. Ma allora |k| 2 û ∈ L 2 (R N ), ovvero 4 u ∈ D(∆). Abbiamo<br />
così <strong>di</strong>mostrato (cfr. Definizione 5.12) che ∆ è il generatore <strong>di</strong> S(t) e<br />
scriveremo <strong>per</strong>ciò S(t) = e t∆ .<br />
4 Non è <strong>di</strong>ffici<strong>le</strong> infatti <strong>di</strong>mostrare che u ∈ H 2 se e solo se u ∈ L 2 e |k| 2 û ∈ L 2 . Basta infatti<br />
<strong>di</strong>mostrare che esistono due costanti c 1 > 0 e c 2 > 0 tali che c 1 (1+|k| 2 ) ≤ |k α | ≤ c 2 (1+|k| 2 )<br />
<strong>per</strong> ogni multi-in<strong>di</strong>ce α con |α| ≤ 2 (si veda anche [7]).
CAPITOLO 5. SEMIGRUPPI 96<br />
5.4 Sorgenti e <strong>per</strong>turbazioni<br />
Consideriamo ora un prob<strong>le</strong>ma <strong>di</strong> Cauchy con un termine <strong>di</strong> “sorgente”:<br />
⎧<br />
⎪⎨<br />
d<br />
u(t) = Au(t)+q(t), t > 0,<br />
dt<br />
⎪⎩<br />
u(0) = u 0 ∈ D(A),<br />
(5.17)<br />
dove q : R + → X è una funzione assegnata. Supponiamo che A sia generatore<br />
<strong>di</strong> un C 0 -semigruppo: sappiamo allora che, se q ≡ 0, la soluzione del prob<strong>le</strong>ma<br />
è data da u(t) = e tA u 0 . Proce<strong>di</strong>amo ora formalmente <strong>per</strong> trovare una soluzione<br />
del prob<strong>le</strong>ma (5.17) comp<strong>le</strong>to. Supponiamo che u(t) sia soluzione e poniamo<br />
v(s) = e (t−s)A u(s), 0 ≤ s ≤ t.<br />
Si può <strong>di</strong>mostrare facilmente che va<strong>le</strong> la regola “<strong>di</strong> Leibnitz”<br />
d<br />
dt etA u(t) = detA tA du(t)<br />
u(t)+e<br />
dt dt<br />
e quin<strong>di</strong>, ricordando anche la proprietà (5.11), potremo scrivere<br />
d<br />
ds v(s) = −Ae(t−s)A u(s)+e (t−s)A d ds u(s)<br />
= −Ae (t−s)A u(s)+e (t−s)A [Au(s)+q(s)] = e (t−s)A q(s).<br />
Integrando fra 0 e t si ottiene<br />
v(s)−v(0) =<br />
ovvero, ricordando la definizione <strong>di</strong> v,<br />
u(t) = e tA u 0 +<br />
∫ t<br />
0<br />
∫ t<br />
0<br />
e (t−s)A q(s)ds<br />
e (t−s)A q(s)ds. (5.18)<br />
Si può <strong>di</strong>mostrare che, sotto opportune ipotesi <strong>di</strong> regolarità 5 , questa formula<br />
(che non èaltrochelaversioneneglispazi<strong>di</strong> Banachdella“formula<strong>di</strong> variazione<br />
del<strong>le</strong> costanti”) ci fornisce la soluzione regolare del prob<strong>le</strong>ma (5.17).<br />
Passiamo ora a considerare il prob<strong>le</strong>ma “<strong>per</strong>turbato”<br />
⎧<br />
⎪⎨<br />
d<br />
u(t) = (A+B)u(t), t > 0,<br />
dt<br />
⎪⎩<br />
u(0) = u 0 ∈ D(A),<br />
(5.19)<br />
dove A è generatore <strong>di</strong> semigruppo e B ∈ B(X). 6 Cominciamo a trattare il caso<br />
più semplice, quello in cui A e B commutano, ovvero<br />
ABu = BAu<br />
<strong>per</strong> ogni u ∈ D(A) ta<strong>le</strong> che Bu ∈ D(A).<br />
5 Ad esempio, oltre a u 0 ∈ D(A), si può richiedere q ∈ C 1 (R + ,X). Se si richiede solamente<br />
u 0 ∈ X e q ∈ L 1 loc (R+ ,X), la (5.18) è, <strong>per</strong> definizione, la soluzione mild del prob<strong>le</strong>ma.<br />
6 Si possono considerare anche <strong>per</strong>turbazioni non-limitate ma sono ben più <strong>di</strong>fficili da<br />
trattare [21, 23, 1].
CAPITOLO 5. SEMIGRUPPI 97<br />
Proposizione 5.19 Se A e B commutano, allora e t(A+B) = e tA e tB .<br />
Dimostrazione Dimostriamo la proposizione nel caso semplice in cui A ∈<br />
B(X), <strong>per</strong> cui la formula esponenzia<strong>le</strong> (5.7) va<strong>le</strong> <strong>per</strong> i tre gruppi e tA , e tB ,<br />
e t(A+B) . Poiché, se AB = BA (e solo in questo caso), si può scrivere la formula<br />
del binomio <strong>di</strong> Newton <strong>per</strong> gli o<strong>per</strong>atori,<br />
(A+B) k =<br />
k∑<br />
j=0<br />
( k<br />
j)<br />
A k−j B j ,<br />
allora la <strong>di</strong>mostrazione dell’uguaglianza e t(A+B) = e tA e tB è identica alla <strong>di</strong>mostrazione<br />
dell’uguaglianza e (s+t)A = e sA e tA nella <strong>di</strong>mostrazione del Teorema 5.8<br />
(scambiandoopportunamenteiruolidel<strong>le</strong>variabilitesconquellideglio<strong>per</strong>atori<br />
A e B).<br />
□<br />
Nel caso commutativo, abbiamo dunque una semplice rappresentazione del semigruppo<br />
generato da A+B in termini <strong>di</strong> quelli generati separatamente da A e<br />
da B. In genera<strong>le</strong>, se A e B non commutano, il semigruppo generato da A+B<br />
non è ricavabi<strong>le</strong> in modo semplice e <strong>di</strong> solito si ricorre all’approccio cosiddetto<br />
“<strong>per</strong>turbativo” che illustriamo qui <strong>di</strong> seguito.<br />
Per provare a risolvere il prob<strong>le</strong>ma (5.19) consideriamo il termine Bu(t) come se<br />
fosse un termine “<strong>di</strong> sorgente” e usiamo la (5.18). Si ottiene allora un’equazione<br />
integra<strong>le</strong> <strong>per</strong> u(t):<br />
u(t) = e tA u 0 +<br />
∫ t<br />
0<br />
e (t−s)A Bu(s)ds (5.20)<br />
(detta talvolta formula <strong>di</strong> Duhamel) che possiamo risolvere col metodo del<strong>le</strong><br />
“approssimazioni successive”, ovvero come il limite della successione u (n) (t),<br />
ottenuta <strong>per</strong> sostituzione ricorsiva della u(s) nell’equazione integra<strong>le</strong> (5.20):<br />
⎧<br />
⎪⎨ u (0) (t) = e tA u 0<br />
∫ t<br />
(5.21)<br />
⎪⎩ u (n+1) (t) = e tA u 0 + e (t−s)A Bu (n) (s)ds, n ≥ 0.<br />
0<br />
Prima <strong>di</strong> <strong>di</strong>mostrare che ta<strong>le</strong> successione ha limite, e che il limite è soluzione<br />
della (5.20), osserviamo che scrivendo esplicitamente <strong>le</strong> sostituzioni ricorsive si<br />
ottiene l’espressione della soluzione u(t) sotto forma <strong>di</strong> serie<br />
u(t) = e tA u 0<br />
+<br />
+<br />
+<br />
∫ t<br />
e (t−s1)A Be s1A u 0 ds 1<br />
0<br />
∫ t ∫ s1<br />
0 0<br />
∫ t ∫ s1<br />
∫ s2<br />
+···<br />
0 0 0<br />
e (t−s1)A Be (s1−s2)A Be s2A u 0 ds 1 ds 2<br />
e (t−s1)A Be (s1−s2)A Be (s1−s3)A Be s3A u 0 ds 1 ds 2 ds 3<br />
(5.22)
CAPITOLO 5. SEMIGRUPPI 98<br />
detta serie <strong>di</strong> Dyson-Phillips. L’utilità della formula (5.22) è chiara: anche<br />
quando conosciamo un’espressione esplicita <strong>di</strong> e tA (e quin<strong>di</strong> del prob<strong>le</strong>ma non<strong>per</strong>turbato)<br />
è in genera<strong>le</strong> impossibi<strong>le</strong> avere un’espressione esplicita della soluzione<br />
del prob<strong>le</strong>ma <strong>per</strong>turbato; la serie <strong>di</strong> Dyson-Phillips ci fornisce <strong>per</strong>ò la<br />
possibiltà <strong>di</strong> esprimere ta<strong>le</strong> soluzione in termi espliciti con un grado <strong>di</strong> approssimazione<br />
(in linea <strong>di</strong> principio) arbitrario.<br />
Dimostriamo ora la convergenza del<strong>le</strong> approssimazioni successive.<br />
Lemma 5.20 Sia Y uno spazio <strong>di</strong> Banach e V ∈ B(Y) un o<strong>per</strong>atore limitato<br />
ta<strong>le</strong> che ∑ ∞<br />
n=0 ‖V n ‖ < ∞. Allora I −V è invertibi<strong>le</strong>, con (I −V) −1 ∈ B(Y).<br />
Dimostrazione Per il teorema <strong>di</strong> tota<strong>le</strong> convergenza (si veda ad esempio [8]<br />
Cap. 2) si ha che ∑ ∞<br />
n=0 V n convergein B(Y). Poichéinoltre, <strong>per</strong> ogni N fissato,<br />
si può scrivere<br />
N∑<br />
V n (I −V) =<br />
n=0<br />
N∑<br />
(I −V)V n =<br />
n=0<br />
passando al limite <strong>per</strong> N → ∞ si ottiene<br />
n=0<br />
N∑<br />
n=0<br />
N+1<br />
∑<br />
V n − V n +I,<br />
n=0<br />
∞∑ ∞∑<br />
V n (I −V) = (I −V)V n = I,<br />
n=0<br />
e dunque ∑ ∞<br />
n=0 V n = (I −V) −1 . □<br />
Teorema 5.21 Siano X uno spazio <strong>di</strong> Banach, A : D(A) → X un generatore <strong>di</strong><br />
semigruppo e B ∈ B(X). Allora, <strong>per</strong> ogni u 0 ∈ X, la successione u (n) (t) definita<br />
da (5.21) converge a una funzione continua u : R + → X che è soluzione unica<br />
dell’equazione integra<strong>le</strong> (5.20).<br />
Dimostrazione Fissiamo T > 0 arbitrario e consideriamo lo spazio <strong>di</strong> Banach<br />
Y = C([0,T],X), del<strong>le</strong> funzioni u : [0,T] → X continue, con la norma<br />
‖u‖ Y<br />
= sup ‖u(t)‖ X<br />
.<br />
t∈[0,T]<br />
Consideriamo inoltre l’o<strong>per</strong>atore lineare V su Y così definito:<br />
(Vu)(t) =<br />
∫ t<br />
0<br />
e (t−s)A Bu(s)ds.<br />
Ricordando la Proposizione 5.5 possiamo scrivere, <strong>per</strong> ogni u ∈ Y,<br />
∫ t<br />
‖Vu‖ Y<br />
= sup<br />
∥ e (t−s)A Bu(s)ds<br />
∥ ≤ TMe ωT ‖B‖‖u‖ Y<br />
X<br />
t∈[0,T]<br />
0<br />
e dunque V ∈ B(Y). Osserviamo che, posto g(t) = e tA u 0 , l’equazione integra<strong>le</strong><br />
(5.20), <strong>le</strong> approssimazioni successive (5.21) e la serie <strong>di</strong> Dyson-Phillips (5.22)<br />
possono essere interpretate nello spazio Y come, rispettivamente, l’equazione<br />
u = g +Vu, (5.23)
CAPITOLO 5. SEMIGRUPPI 99<br />
la successione ricorsiva<br />
{u (0) = g<br />
u (n+1) = Vu (n) , n ≥ 0.<br />
(5.24)<br />
e la serie<br />
u =<br />
∞∑<br />
V n g. (5.25)<br />
n=0<br />
È dunque chiaro che, se <strong>di</strong>mostriamo che V sod<strong>di</strong>sfa <strong>le</strong> ipotesi del Lemma 5.20,<br />
l’equazione (5.23) ha soluzione unica data da<br />
u = (I −V) −1 g =<br />
∞∑<br />
V n g<br />
ilchesignificache(almeno<strong>per</strong>t ∈ [0,T])l’equazioneintegra<strong>le</strong>(5.20)haun’unica<br />
soluzione continua, data dalla serie <strong>di</strong> Dyson-Phillips. Essendo T arbitrario si<br />
sarà così <strong>di</strong>mostrato che la soluzione esiste (ed è unica e continua) <strong>per</strong> tutti i<br />
tempi t ≥ 0. Il prob<strong>le</strong>ma si riduce quin<strong>di</strong> a <strong>di</strong>mostrare che la serie ∑ ∞<br />
n=0 ‖V n ‖<br />
è convergente (dove naturalmente ‖V n ‖ è la norma <strong>di</strong> V n in B(Y)). A questo<br />
scopo osserviamo che, <strong>per</strong> ogni t ∈ [0,T] e <strong>per</strong> ogni u ∈ Y, si ha<br />
∫ t<br />
∫ t<br />
‖(Vu)(t)‖ X<br />
=<br />
∥ e (t−s)A Bu(s)ds<br />
∥ ≤ α ‖u(s)‖ X<br />
ds ≤ tα‖u‖ Y<br />
X<br />
(dove si è posto α = Me Tω ‖B‖), e dunque<br />
∥<br />
∥(V 2 u)(t) ∥ ∥<br />
X<br />
≤ α<br />
0<br />
∫ t<br />
0<br />
n=0<br />
∫ t<br />
‖(Vu)(s)‖ X<br />
ds ≤ α 2 ‖u‖ Y<br />
sds = α 2 t 2<br />
‖u‖ Y<br />
2<br />
e così via. Per induzione si può facilmente <strong>di</strong>mostrare che<br />
‖(V n u)(t)‖ X<br />
≤ (αt)n<br />
n!<br />
0<br />
‖u‖ Y<br />
,<br />
da cui, passando al sup su t ∈ [0,T], si ricava subito<br />
0<br />
Pertanto<br />
n=0<br />
e il teorema è così <strong>di</strong>mostrato.<br />
‖V n ‖ ≤ (αT)n .<br />
n!<br />
∞∑ ∞∑<br />
‖V n (αT) n<br />
‖ ≤ = e αT < ∞<br />
n!<br />
n=0<br />
□<br />
Per concludere questo paragrafo menzioniamo un altro risultato che fornisce<br />
un <strong>di</strong>verso metodo <strong>di</strong> approssimazione della soluzione del prob<strong>le</strong>ma <strong>per</strong>turbato.<br />
Ta<strong>le</strong>risultatoèlaformula <strong>di</strong> Trotter (5.26)checi<strong>di</strong>ceinsostanzachel’azionedel<br />
semigruppo e t(A+B) può essere approssimata <strong>di</strong>videndo l’intervallo tempora<strong>le</strong><br />
[0,t] in n parti uguali, su ciascuna del<strong>le</strong> quali si fanno agire separatamente e<br />
alternativamenteiduesemigruppie tA ed e tB . Pern → ∞ siottieneesattamente<br />
l’azione <strong>di</strong> e t(A+B) .
CAPITOLO 5. SEMIGRUPPI 100<br />
Teorema 5.22 Siano X uno spazio <strong>di</strong> Banach, A : D(A) → X un generatore<br />
<strong>di</strong> semigruppo e B ∈ B(X). Supponiamo che <strong>per</strong> e tA valga la stima (5.6) con<br />
M = 1. Allora, <strong>per</strong> ogni u 0 ∈ X e t ≥ 0, si ha<br />
(<br />
e t(A+B) u 0 = lim e t n A e t B) n<br />
n u0 (5.26)<br />
n→∞<br />
La <strong>di</strong>mostrazione del Teorema 5.22 si può trovare (sotto ipotesi più generali) in<br />
[23] e [24]. La formula <strong>di</strong> Trotter trova un’importante applicazione nel campo<br />
dell’analisi numerica, fornendo una giustificazione teorica del cosiddetto splitstep<br />
method.<br />
5.5 Equazione <strong>di</strong> trasporto con collisioni<br />
In questo paragrafovogliamo applicare la teoria dei semigruppi (e in particolare<br />
la serie <strong>di</strong> Dyson-Phillips) allo stu<strong>di</strong>o della equazione del trasporto, che descrive<br />
la <strong>di</strong>namica <strong>di</strong> un insieme statistico <strong>di</strong> particel<strong>le</strong> interagenti con l’ambiente<br />
circostante. Ta<strong>le</strong> equazione, nel<strong>le</strong> sue numerose varianti, è usata in importanti<br />
applicazioni tra cui l’ingegneria nuc<strong>le</strong>are (<strong>di</strong>namica dei neutroni in un reattore),<br />
l’astrofisica e la geofisica (passaggio <strong>di</strong> fotoni attraverso nubi interstellari o<br />
atmosfere planetarie) e l’ingegneria e<strong>le</strong>ttronica (<strong>di</strong>namica degli e<strong>le</strong>ttroni in un<br />
semiconduttore).<br />
Mostriamo brevemente come si può ricavare l’equazione del trasporto nella sua<br />
forma più basilare, rimandando al libro <strong>di</strong> Duderstadt e Martin [26] i <strong>le</strong>ttori interessati<br />
a maggiori approfon<strong>di</strong>menti. Si consideri una popolazione <strong>di</strong> particel<strong>le</strong><br />
identiche descritte da una funzione <strong>di</strong> densità nello spazio del<strong>le</strong> fasi, f(x,v,t),<br />
<strong>per</strong> cui<br />
∫<br />
f(x,v,t)dxdv = numero <strong>di</strong> particel<strong>le</strong> che all’istante t<br />
R<br />
si trovano nella regione R ⊂ R 6 dello<br />
spazio del<strong>le</strong> fasi.<br />
In comp<strong>le</strong>ta assenza <strong>di</strong> interazioni <strong>le</strong> particel<strong>le</strong> si muoveranno <strong>per</strong> pura inerzia<br />
e dunque la loro densità si manterrà costante lungo <strong>le</strong> traiettorie nello spazio<br />
del<strong>le</strong> fasi corrispondenti al<strong>le</strong> equazioni <strong>di</strong> Newton<br />
Derivando f lungo tali traiettorie si otterrà <strong>per</strong>ciò<br />
ẋ(t) = v(t), ˙v(t) = 0. (5.27)<br />
0 = d dt f(x(t),v(t),t) = ẋ·∇ xf + ˙v ·∇ v f +f t = v ·∇ x f +f t ,<br />
da cui segue l’equazione <strong>di</strong> trasporto “libero”<br />
f t (x,v,t) = −v ·∇ x f(x,v,t) (5.28)<br />
(che è esattamente la (3.30), già stu<strong>di</strong>ata nel capitolo 3). Supponiamo ora<br />
che <strong>le</strong> particel<strong>le</strong> interagiscano con il mezzo circostante a causa <strong>di</strong> “urti” che
CAPITOLO 5. SEMIGRUPPI 101<br />
ne cambiano istantaneamente la velocità. La densità f non sarà più costante<br />
lungo <strong>le</strong> traiettorie (5.27) <strong>per</strong>ché ogni particella ha una certa probabilità <strong>di</strong><br />
subire un urto che ne mo<strong>di</strong>fica la velocità, e <strong>di</strong> essere così spostata da un punto<br />
a un altro dello spazio del<strong>le</strong> fasi (la x <strong>per</strong>ò rimane costante se supponiamo<br />
che l’urto sia localizzato). Per quantificare questo fenomeno, detto scattering,<br />
descriviamo ogni urto tramite una velocità pre-collisiona<strong>le</strong> v pre e una velocità<br />
post-collisiona<strong>le</strong> v post , e tramite la funzione<br />
k(v pre ,v post ) = probabilità <strong>per</strong> unità <strong>di</strong> tempo e <strong>per</strong><br />
unità <strong>di</strong> volume nello spazio del<strong>le</strong> velocità<br />
post-collisionali che una particella<br />
con velocità v pre subisca un urto e ne<br />
riemerga con una velocità v post .<br />
La funzione k(v pre ,v post ) è detta nuc<strong>le</strong>o <strong>di</strong> scattering. 7 Fissato dunque un punto<br />
(x,v) nello spazio del<strong>le</strong> fasi, in ta<strong>le</strong> punto avremo:<br />
• una variazione negativa <strong>di</strong> densità, −k(v,v ′ )f(x,v,t)dv ′ , dovuta al<strong>le</strong> particel<strong>le</strong><br />
che scompaiono <strong>per</strong> unità <strong>di</strong> tempo da (x,v) <strong>per</strong>ché la loro velocità<br />
era v ed è <strong>di</strong>ventata una certa v ′ contenuta in un volumetto dv ′<br />
(out-scattering);<br />
• una variazione positiva <strong>di</strong> densità, k(v ′ ,v)f(x,v ′ ,t)dv ′ , dovuta al<strong>le</strong> particel<strong>le</strong><br />
che compaiono <strong>per</strong> unità <strong>di</strong> tempo in (x,v) <strong>per</strong>ché la loro velocità era<br />
v ′ (contenuta in un dv ′ ) ed è <strong>di</strong>ventata v (in-scattering);<br />
Integrando su tutte <strong>le</strong> possibili velocità v ′ si ottiene il seguente bilancio lungo<br />
<strong>le</strong> traiettorie<br />
∫<br />
∫<br />
d<br />
dt f(x,v,t) = − k(v,v ′ )f(x,v,t)dv ′ + k(v ′ ,v)f(x,v ′ ,t)dv ′<br />
R 3 R<br />
∫<br />
3<br />
= −σ(v)f(x,v,t)+ k(v ′ ,v)f(x,v ′ ,t)dv ′<br />
R 3<br />
dove si è sottointeso x = x(t), v = v(t) e si è posto<br />
∫<br />
σ(v) = k(v,v ′ )dv ′ .<br />
R 3<br />
Si ottiene così la seguente equazione <strong>di</strong> trasporto collisiona<strong>le</strong> che supporremo,<br />
<strong>per</strong>semplicità, esserepostasututtolospaziodel<strong>le</strong>fasi(equin<strong>di</strong>senzacon<strong>di</strong>zioni<br />
al contorno) e che corre<strong>di</strong>amo <strong>di</strong> un dato inizia<strong>le</strong>:<br />
⎧<br />
∫<br />
⎨f t (x,v,t) = −v ·∇ x f(x,v,t)−σ(v)f(x,v,t)+ k(v ′ ,v)f(x,v ′ ,t)dv ′<br />
R<br />
⎩<br />
3 f(x,v,0) = f 0 (x,v), (x,v) ∈ R 6 , t ≥ 0.<br />
(5.29)<br />
7 Per semplicità stiamo supponendo che il mezzo circostante sia omogeneo <strong>per</strong> cui k non<br />
<strong>di</strong>pende da x.
CAPITOLO 5. SEMIGRUPPI 102<br />
Nel seguito supporremo che la funzione k(v ′ ,v) sia non negativa, integrabi<strong>le</strong><br />
rispetto a v ′ e ta<strong>le</strong> che<br />
∫<br />
σ(v) = k(v,v ′ )dv ′ ≤ σ ∞ , (5.30)<br />
R 3<br />
con σ ∞ costante non negativa.<br />
Vogliamo ora analizzare il prob<strong>le</strong>ma ai valori iniziali (5.29) me<strong>di</strong>ante la teoria<br />
dei semigruppi. Come prima cosa dobbiamo scegliere uno spazio <strong>di</strong> Banach in<br />
cui inquadrare il prob<strong>le</strong>ma. Dal momento che, <strong>per</strong> ogni t fissato, l’integra<strong>le</strong><br />
∫<br />
N(t) = f(x,v,t)dxdv<br />
R 6<br />
ha il significato fisico <strong>di</strong> numero tota<strong>le</strong> <strong>di</strong> particel<strong>le</strong> al tempo t, è chiaro che<br />
f(x,v,t) deve essere integrabi<strong>le</strong> rispetto a x e v <strong>per</strong> ogni t. La scelta natura<strong>le</strong><br />
cade quin<strong>di</strong> sullo spazio <strong>di</strong> Banach<br />
X = L 1 (R 6 ,R).<br />
Interpretiamo dunque (5.29) come il seguente prob<strong>le</strong>ma <strong>di</strong> evoluzione in X:<br />
⎧<br />
⎪⎨<br />
d<br />
f(t) = (A+B)f(t), t > 0,<br />
dt (5.31)<br />
⎪⎩<br />
f(0) = f 0 ∈ X,<br />
dove gli o<strong>per</strong>atori A e B sono definiti nel modo seguente:<br />
⎧<br />
⎨ (Af)(x,v) = −v ·∇ x f(x,v)+σ(v)f(x,v),<br />
⎩<br />
D(A) = {f ∈ X | v ·∇ x f ∈ X},<br />
⎧ ∫<br />
⎨ (Bf)(x,v) = k(v ′ ,v)f(x,v ′ )dv ′ ,<br />
R<br />
⎩<br />
3 D(B) = X.<br />
(5.32)<br />
(5.33)<br />
Ricavare (formalmente) il semigruppo generato da A significa risolvere il prob<strong>le</strong>ma<br />
{<br />
ft (x,v,t) = −v ·∇ x f(x,v,t)−σ(v)f(x,v,t)<br />
f(x,v,0) = f 0 (x,v), (x,v) ∈ R 6 , t ≥ 0,<br />
il che può essere fatto <strong>di</strong>rettamente oppure osservando che la funzione<br />
g(x,v,t) = e σ(v)t f(x,v,t)<br />
deve sod<strong>di</strong>sfare il prob<strong>le</strong>ma (3.30) (con dato inizia<strong>le</strong> g(x,v,0) = f 0 (x,v)). Dall’analisi<br />
svolta a suo tempo sappiamo che la soluzione è<br />
g(x,v,t) = f 0 (x−tv,v)<br />
e dunque<br />
f(x,v,t) = e −σ(v)t f 0 (x−tv,v).
CAPITOLO 5. SEMIGRUPPI 103<br />
Abbiamo <strong>per</strong>ciò in<strong>di</strong>viduato formalmente 8 l’azione del semigruppo (anzi, del<br />
gruppo) generato da A, che in<strong>di</strong>cheremo con T(t),<br />
(T(t)f)(x,v) = e −σ(v)t f(x−tv,v), f ∈ X. (5.34)<br />
Per quanto riguarda l’o<strong>per</strong>atore B, sfruttando il fatto che k è una funzione<br />
non-negativa e utilizzando la (5.30), si ha<br />
∣∫<br />
∣ ∣∣∣ ∣∣∣<br />
‖Bf‖ = k(v<br />
∫R ′ ,v)f(x,v ′ )dv ′ dxdv ≤<br />
6 R 3<br />
∫<br />
∫<br />
k(v<br />
∫R ′ ,v)|f(x,v ′ )|dv ′ dxdv = σ(v)|f(x,v)|dxdv ≤ σ ∞ ‖f‖ X<br />
6 R 3 R 6<br />
<strong>per</strong> ogni f ∈ X. Dunque Bf è effettivamente definito <strong>per</strong> ogni f ∈ X e inoltre<br />
B ∈ B(x), con ‖B‖ ≤ σ ∞ .<br />
Siamo <strong>per</strong>ciò nel<strong>le</strong> ipotesi del Teorema 5.21 e possiamo concludere che la soluzione<br />
del prob<strong>le</strong>ma <strong>di</strong> trasporto (5.31) (o meglio, della sua versione integra<strong>le</strong>) è<br />
data dalla serie <strong>di</strong> Dyson-Phillips<br />
f(t) = T(t)f 0<br />
+<br />
+<br />
∫ t<br />
T(t−s 1 )BT(s 1 )f 0 ds 1<br />
0<br />
∫ t ∫ s1<br />
+···<br />
0 0<br />
T(t−s 1 )BT(s 1 −s 2 )BT(s 2 )f 0 ds 1 ds 2<br />
(5.35)<br />
È interessante notare che i termini <strong>di</strong> questa serie hanno un significato fisico<br />
ben preciso. Fissiamo infatti un punto (x,v) nello spazio del<strong>le</strong> fasi e un istante<br />
<strong>di</strong> tempo t. Il primo termine della serie,<br />
(T(t)f 0 )(x,v) = e −σ(v)t f 0 (x−tv,v),<br />
è il contributo <strong>di</strong> tutte quel<strong>le</strong> particel<strong>le</strong> che sono arrivate nel punto x con velocità<br />
v senza aver subito urti: non avendo mai mo<strong>di</strong>ficato la loro velocità esse si<br />
trovavano nel punto x−vt all’istante inizia<strong>le</strong> (t = 0). Il fattore <strong>di</strong> attenuazione<br />
e −σ(v)t tiene conto del<strong>le</strong> altre particel<strong>le</strong> che si trovavano in x − vt all’istante<br />
inizia<strong>le</strong> e che invece hanno subito urti. Nella Figura 5.2 (a) abbiamo rappresentato<br />
questa situazione: la linea tratteggiata rappresenta la <strong>di</strong>namica “libera”<br />
e −σ(v)t f 0 (x−tv,v).<br />
Il secondo termine della serie, ∫ t<br />
0 T(t − s 1)BT(s 1 )f 0 ds 1 , rappresenta il contributo<br />
<strong>di</strong> quel<strong>le</strong> particel<strong>le</strong> che sono arrivate nel punto x con velocità v avendo<br />
subito un solo urto all’istante s 1 (contributo integrato si tutti i possibili istanti<br />
dell’urto, 0 ≤ s 1 ≤ t). Questa situazione è rappresentata graficamente nella<br />
Figura 5.2 (b): tali particel<strong>le</strong> hanno viaggiato <strong>per</strong> un tempo s 1 con velocità v ′ ,<br />
8 Per <strong>di</strong>mostrare rigorosamente che A è il generatore del gruppo definito dalla (5.34) si<br />
dovrebbe applicare la Definizione 5.12. In particolare, si dovrebbe <strong>di</strong>mostrare che il dominio<br />
D(A), definito nella (5.32), è proprio il dominio del generatore come definito nella (5.10).
CAPITOLO 5. SEMIGRUPPI 104<br />
s 1<br />
2<br />
v ′′ v<br />
t<br />
(x,t)<br />
s<br />
v ′ (c)<br />
(a)<br />
x−vt<br />
v<br />
t<br />
(x,t)<br />
(b)<br />
v ′<br />
x−v(t−s 1 )−v ′ s 1<br />
v<br />
t<br />
(x,t)<br />
s 1<br />
x−v(t−s 1 )−v ′ (s 1 −s 2 )−v ′′ s 2<br />
Figura 5.2: Interpretazione dei primi tre termini della serie <strong>di</strong> Dyson-Phillips (5.35)
CAPITOLO 5. SEMIGRUPPI 105<br />
hanno subito un urto all’istante s 1 che ha cambiato la loro velocità da v ′ a v,<br />
dopo<strong>di</strong>ché hanno viaggiato in<strong>di</strong>sturbate <strong>per</strong> un tempo t−s 1 . Dunque, queste<br />
particel<strong>le</strong> si trovavano nel punto x−v(t−s 1 )−v ′ s 1 all’istante inizia<strong>le</strong>. Le altre<br />
particel<strong>le</strong> che si trovavano nel medesimo punto all’istante inizia<strong>le</strong>, ma che<br />
hanno avuto storie <strong>di</strong>fferenti (ad esempio più <strong>di</strong> un urto, o un solo urto con<br />
velocità post-collisiona<strong>le</strong> <strong>di</strong>versa da v), sono sparite in ragione del solito fattore<br />
<strong>di</strong> attenuazione presente nella <strong>di</strong>namica libera.<br />
Analogamente, il termine successivo nella serie <strong>di</strong> Dyson-Phillips rappresenta il<br />
contributo del<strong>le</strong> particel<strong>le</strong> che hanno subito due urti (Figura 5.2 (c)), e così via<br />
nei termini successivi.
Appen<strong>di</strong>ce A<br />
Richiami su spazi lineari,<br />
spazi L p e integra<strong>le</strong> <strong>di</strong><br />
Lebesgue<br />
Riportiamo in questa appen<strong>di</strong>ce un brevissimo compen<strong>di</strong>o <strong>di</strong> definizioni e risultati<br />
sugli spazi lineari, e in particolare sugli spazi L p , utlizzati frequentemente<br />
in queste <strong>di</strong>spense.<br />
Definizione A.1 (Spazio vettoria<strong>le</strong> (o lineare) su C)<br />
cui sono definite <strong>le</strong> seguenti o<strong>per</strong>azioni:<br />
È un insieme V su<br />
somma (v,w) ∈ V×V ↦→ v+w ∈ V, ta<strong>le</strong> che (V,+) sia un gruppo commutativo<br />
(e<strong>le</strong>mento neutro 0, opposto −v)<br />
prodotto <strong>per</strong> scalare (α,v) ∈ C×V ↦→ αv ∈ V, ta<strong>le</strong> che:<br />
i) α(βv) = (αβ)v e 1v = v,<br />
ii) α(v +w) = αv +αw e (α+β)v = αv +βv.<br />
□<br />
Definizione A.2 (Spazio vettoria<strong>le</strong> topologico)<br />
topologico X ta<strong>le</strong> che:<br />
È uno spazio vettoria<strong>le</strong> e<br />
i) i punti sono chiusi,<br />
ii) <strong>le</strong> o<strong>per</strong>azioni <strong>di</strong> somma e <strong>di</strong> prodotto <strong>per</strong> scalare sono continue.<br />
□<br />
Definizione A.3 (Spazio vettoria<strong>le</strong> normato)<br />
con una funzione ‖·‖ : X → [0,+∞) ta<strong>le</strong> che:<br />
È uno spazio vettoria<strong>le</strong> X<br />
i) ‖v‖ = 0 se e solo se v = 0,<br />
ii) ‖v +w‖ ≤ ‖v‖+‖w‖, v,w ∈ X,<br />
iii) ‖αv‖ = |α|‖v‖, v ∈ X, α ∈ C.<br />
□<br />
106
APPENDICE A. RICHIAMI SU SPAZI LINEARI E SPAZI L P 107<br />
Uno spazio vettoria<strong>le</strong> normato è anche uno spazio metrico con la <strong>di</strong>stanza<br />
d(v,w) := ‖w−v‖<br />
e quin<strong>di</strong> è anche uno spazio topologico con la topologia “metrica”, in cui un<br />
sottoinsieme A ⊂ X è a<strong>per</strong>to se e solo se <strong>per</strong> ogni x 0 ∈ A esiste r > 0 ta<strong>le</strong> che<br />
{x ∈ X | d(x,x 0 ) < r} ⊂ A.<br />
Si <strong>di</strong>mostra facilmente che la topologia indotta dalla norma rende X uno spazio<br />
vettoria<strong>le</strong> topologico.<br />
Definizione A.4 (Spazio <strong>di</strong> Banach) È uno spazio vettoria<strong>le</strong> normato comp<strong>le</strong>to<br />
rispetto alla topologia indotta dalla norma [ricor<strong>di</strong>amo che uno spazio topologico<br />
X è comp<strong>le</strong>to se ogni successione <strong>di</strong> Cauchy in X converge a un qualche<br />
punto <strong>di</strong> X].<br />
Definizione A.5 (Spazio <strong>di</strong> Hilbert) È uno spazio <strong>di</strong> Banach X la cui norma<br />
è indotta da un prodotto Hermitiano 〈·,·〉 : X ×X → C, ta<strong>le</strong> che 1<br />
i) 〈v +w,u〉 = 〈v,u〉 + 〈w,u〉 e 〈αv,u〉 = α〈v,u〉 <strong>per</strong> ogni u,v,w ∈ X e<br />
α ∈ C,<br />
ii) 〈v,w〉 = 〈w,v〉, <strong>per</strong> ogni v,w ∈ X,<br />
iii) 〈v,v〉 ≥ 0 <strong>per</strong> ogni v ∈ X, e 〈v,v〉 = 0 se e solo se v = 0.<br />
La norma indotta è ‖v‖ := √ 〈v,v〉.<br />
Negli spazi <strong>di</strong> Hilbert va<strong>le</strong> la Disuguaglianza <strong>di</strong> Schwartz<br />
|〈v,w〉| ≤ ‖v‖‖w‖,<br />
che ci <strong>di</strong>ce, fra l’altro, che 〈·,·〉 è continuo rispetto alla topologia indotta da ‖·‖.<br />
Un esempio molto importante <strong>di</strong> spazi <strong>di</strong> Banach è quello degli spazi L p . Sia Ω<br />
un sottoinsieme a<strong>per</strong>to <strong>di</strong> R N e sia 1 ≤ p < +∞; definiamo:<br />
{<br />
∫ }<br />
L p (Ω) := f : Ω → C<br />
∣ f è misurabi<strong>le</strong> e |f(x)| p dx < ∞ / ∼<br />
dove<br />
Se f ∈ L p (Ω), definiamo<br />
f ∼ g ⇐⇒ mis{x ∈ Ω | f(x) ≠ g(x)} = 0.<br />
(∫<br />
‖f‖ p<br />
:= |f(x)| p dx<br />
Ω<br />
Ω<br />
) 1/p<br />
(f è un qualunque rappresentante della classe <strong>di</strong> equiva<strong>le</strong>nza). Si ha:<br />
1 In queste <strong>di</strong>spense utilizziamo la convenzione, più comune nella <strong>le</strong>tteratura matematica,<br />
della linearità a sinistra. Spesso, soprattutto nei testi <strong>di</strong> fisica, si usa la convenzione opposta.
APPENDICE A. RICHIAMI SU SPAZI LINEARI E SPAZI L P 108<br />
• ‖f‖ p<br />
≥ 0 (ovvio);<br />
• ‖f‖ p<br />
= 0 ⇔ f = 0 (<strong>per</strong>ché f = 0 significa “f = 0 q. o.”);<br />
• ‖f +g‖ p<br />
≤ ‖f‖ p<br />
+‖g‖ p<br />
(Teorema: Disuguaglianza <strong>di</strong> Minkowski);<br />
• ‖αf‖ p<br />
= |α|‖f‖ p<br />
(ovvio).<br />
Dunque ‖·‖ p è una norma su L p (Ω). Inoltre, si può <strong>di</strong>mostrare che, se {f n } ⊂<br />
L p (Ω) è una successione <strong>di</strong> Cauchy rispetto a ‖·‖ p<br />
, esiste f ∈ L p (Ω) ta<strong>le</strong> che<br />
‖f n −f‖ p<br />
→ 0; dunque L p (Ω) è uno spazio <strong>di</strong> Banach (questo risultato è noto<br />
anche come Teorema <strong>di</strong> Riesz-Fisher).<br />
Lo spazio L ∞ (Ω) è definito da<br />
L ∞ (Ω) := {f : Ω → C |f è misurabi<strong>le</strong> e esssup|f| < +∞}/ ∼<br />
con la norma<br />
{<br />
}<br />
‖f‖ ∞<br />
= esssup|f| := inf M ≥ 0∣ mis{x ∈ Ω : |f(x)| > M} = 0 .<br />
Si <strong>di</strong>mostra che anche L ∞ (Ω) è uno spazio <strong>di</strong> Banach.<br />
Un importante risultato sugli spazi L p è la <strong>di</strong>suguaglianza <strong>di</strong> Hölder: siano<br />
1 ≤ p,p ′ ≤ ∞ tali che<br />
1<br />
p + 1 p ′ = 1<br />
allora, se f ∈ L p (Ω) e g ∈ L p′ (Ω), si ha fg ∈ L 1 (Ω) e<br />
∫<br />
|f(x)g(x)|dx ≤ ‖f‖ p<br />
‖g‖ p ′.<br />
Ω<br />
(p e p′ si <strong>di</strong>cono esponenti coniugati);<br />
Osserviamo che p = 2 è coniugato <strong>di</strong> se stesso <strong>per</strong> cui se f,g ∈ L 2 (Ω), si ha<br />
fg ∈ L 1 (Ω). Si può <strong>per</strong>ciò definire 〈·,·〉 : L 2 (Ω)×L 2 (Ω) → C:<br />
∫<br />
〈f,g〉 := f(x)g(x)dx,<br />
Ω<br />
che risulta essere un prodotto Hermitiano. Si ha ovviamente che ‖f‖ 2<br />
= √ 〈f,f〉<br />
e che va<strong>le</strong> la <strong>di</strong>suguaglianza <strong>di</strong> Schwartz (è infatti data dalla <strong>di</strong>suguaglianza <strong>di</strong><br />
Hölder con p = p ′ = 2). Possiamo <strong>per</strong>ciò concludere che L 2 (Ω) è uno spazio <strong>di</strong><br />
Hilbert.<br />
Osservazione A.6 Osserviamo che se misΩ < ∞ e 1 ≤ p ≤ q ≤ ∞, allora<br />
L q (Ω) ⊂ L p (Ω). Infatti, se f ∈ L q (Ω), applicando la <strong>di</strong>suguaglianza <strong>di</strong> Hölder<br />
al<strong>le</strong> funzioni<br />
|f| p ∈ L q/p (Ω), 1 ∈ L (q/p)′ (Ω)<br />
possiamo scrivere<br />
∫<br />
Ω<br />
(∫ ) p/q (∫ 1−p/q<br />
|f(x)| p dx ≤ |f(x)| q dx 1dx)<br />
= ‖f‖ p q (misΩ)1−p/q < +∞,<br />
Ω<br />
Ω
APPENDICE A. RICHIAMI SU SPAZI LINEARI E SPAZI L P 109<br />
il che <strong>di</strong>mostra che f ∈ L p (Ω). Notiamo che abbiamo <strong>di</strong>mostrato anche che va<strong>le</strong><br />
la relazione fra <strong>le</strong> norme<br />
‖f‖ p<br />
≤ C‖f‖ q<br />
,<br />
(A.1)<br />
dove C = (misΩ) 1 p −1q è una costante che <strong>di</strong>pende solo da misΩ, da p e da q.<br />
Se invece misΩ = ∞, si possono trovare esempi <strong>di</strong> funzioni che stanno in L q (Ω)<br />
ma non in L p (Ω) [esercizio].<br />
Osservazione A.7 Tutto quello che abbiamo detto finora sugli spazi L p si<br />
potrebbe generalizzare sostituendo (Ω,dx) con uno spazio <strong>di</strong> misura qualunque<br />
(purché separabi<strong>le</strong>).<br />
Enunciamo un risultato spesso utilizzato in questo corso. La <strong>di</strong>mostrazione si<br />
può trovare, ad esempio, in [6].<br />
Teorema A.8 Sia Ω ⊂ R N un a<strong>per</strong>to. Allora C0 ∞ (Ω), lo spazio del<strong>le</strong> funzioni<br />
C ∞ a supporto compatto in Ω, è denso in L p (Ω), <strong>per</strong> ogni 1 ≤ p < ∞.<br />
Ricor<strong>di</strong>amo inoltre alcuni importanti risultati della teoria dell’integrazione secondo<br />
Lebesgue.<br />
Teorema A.9 (<strong>di</strong> Tonelli) Siano Ω 1 un a<strong>per</strong>to <strong>di</strong> R N e Ω 2 un a<strong>per</strong>to <strong>di</strong> R M .<br />
Sia F : Ω 1 ×Ω 2 → C misurabi<strong>le</strong> e non negativa. Allora <strong>le</strong> funzioni ∫ Ω 2<br />
F(·,y)dy<br />
e ∫ Ω 1<br />
F(x,·)dx sono misurabili e<br />
∫<br />
{∫ } {∫ }<br />
F(x,y)dxdy = F(x,y)dy dx = F(x,y)dx dy<br />
Ω 1×Ω 2<br />
∫Ω 1 Ω 2<br />
∫Ω 2 Ω 1<br />
(eventualmente = +∞).<br />
Teorema A.10 (<strong>di</strong> Fubini) Se F : Ω 1 ×Ω 2 → C è integrabi<strong>le</strong> allora ∫ Ω 2<br />
F(·,y)dy<br />
e ∫ Ω 1<br />
F(x,·)dx sono integrabili q.o. e valgono <strong>le</strong> uguaglianze precedenti.<br />
Teorema A.11 (della convergenza dominata) Sia Ω un a<strong>per</strong>to <strong>di</strong> R N e f n<br />
una successione <strong>di</strong> funzioni integrabili su Ω tali che<br />
i) lim<br />
n→∞ f n(x) = f(x) <strong>per</strong> q.o. x ∈ Ω;<br />
ii) esiste g integrabi<strong>le</strong> su Ω ta<strong>le</strong> che |f n (x)| ≤ g(x) q.o. in Ω, <strong>per</strong> ogni n ∈ N;<br />
allora f è integrabi<strong>le</strong> e<br />
∫ ∫<br />
lim f n (x)dx = f(x)dx.<br />
n→∞<br />
Ω Ω<br />
Infine, sarà uti<strong>le</strong> ricordare il sistema del<strong>le</strong> coor<strong>di</strong>nate polari in R N :<br />
⎧<br />
x 1 = ρcosθ 1<br />
⎪⎨<br />
x 2 = ρsinθ 1 cosθ 2<br />
···<br />
x N−1 = ρsinθ 1···sinθ N−2 cosθ N−1<br />
⎪⎩<br />
x N = ρsinθ 1···sinθ N−2 sinθ N−1<br />
(A.2)<br />
ρ > 0, 0 < θ i < π (1 ≤ i ≤ N −2), 0 < θ N−1 < 2π.
APPENDICE A. RICHIAMI SU SPAZI LINEARI E SPAZI L P 110<br />
Il determinante Jacobiano della trasformazione è<br />
ρ N−1 sin N−2 θ 1 sin N−3 θ 2···sinθ N−2 .<br />
(A.3)<br />
La misura della su<strong>per</strong>ficie della sfera unitaria S N−1 in R N è <strong>per</strong>ciò<br />
mis(S N−1 ) := ω N−1<br />
e risulta<br />
=<br />
∫ π<br />
0<br />
dθ 1···<br />
∫ π<br />
dove Γ(x) è la funzione Gamma <strong>di</strong> Eu<strong>le</strong>ro:<br />
Utilizzando <strong>le</strong> proprietà<br />
0<br />
Γ(x) =<br />
∫ 2π<br />
dθ N−2 dθ N−1 sin N−2 θ 1 sin N−3 θ 2···sinθ N−2<br />
0<br />
ω N−1 = 2πN/2<br />
Γ ( ), (A.4)<br />
N<br />
2<br />
∫ +∞<br />
0<br />
e −t t x−1 dt, x > 0. (A.5)<br />
Γ(x+1) = xΓ(x), Γ(1) = 1, Γ(1/2) = π 1/2 .<br />
si possono ricavare tutti i valori <strong>di</strong> ω N−1 :<br />
ω 0 = 2, ω 1 = 2π, ω 2 = 4π, ω 3 = 2π 2 , ···
Appen<strong>di</strong>ce B<br />
Esercizi<br />
1. Calcolare i coefficienti <strong>di</strong> Fourier della seguenti funzioni definite <strong>per</strong> x ∈<br />
(−π,π]: {<br />
α, se x ∈ (0,π],<br />
f 1 (x) =<br />
−α, se x ∈ (−π,0],<br />
{<br />
α, se x ∈ (0,π],<br />
f 2 (x) =<br />
0, se x ∈ (−π,0],<br />
f 3 (x) = x<br />
⎧<br />
⎪⎨ 1−| 2x −1|, se x ∈ (0,π],<br />
π<br />
f 4 (x) =<br />
⎪⎩<br />
| 2x +1|−1, se x ∈ (−π,0],<br />
π<br />
con α costante rea<strong>le</strong>.<br />
2. Siano f e g funzioni 2π-<strong>per</strong>io<strong>di</strong>che, integrabili su un <strong>per</strong>iodo. Calcolare i<br />
coefficienti <strong>di</strong> Fourier del prodotto fg (supponendo che sia integrabi<strong>le</strong>) e della<br />
convoluzione f ⋆g in in funzione dei coefficienti <strong>di</strong> Fourier f n e g n . <strong>di</strong> f e g.<br />
3. Risolvere il seguente prob<strong>le</strong>ma <strong>di</strong> <strong>di</strong>ffusione “nella sbarretta” con dati <strong>di</strong><br />
Dirich<strong>le</strong>t non-omogenei e <strong>di</strong>pendenti dal tempo:<br />
⎧<br />
u t (x,t) = cu xx (x,t), x ∈ (0,l), t > 0,<br />
⎪⎨ u(0,t) = α(t),<br />
u(l,t) = β(t),<br />
⎪⎩<br />
u(x,0) = ϕ(x).<br />
111
APPENDICE B. ESERCIZI 112<br />
4. Risolvere il seguente prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong>:<br />
⎧<br />
u tt (x,t)−c 2 u xx (x,t)+m 2 u(x,t) = 0, x ∈ (0,l), t ∈ R,<br />
⎪⎨ u(0,t) = u(l,0) = 0,<br />
u(x,0) = ϕ(x),<br />
⎪⎩<br />
u t (x,0) = ψ(x),<br />
con c ed m costanti assegnate.<br />
5. Risolvere il seguente prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong>:<br />
⎧<br />
⎪⎨<br />
u t (x,t)+u xxxx (x,t) = 0, x ∈ (0,π), t ∈ R,<br />
u(0,t) = u(π,0) = 0,<br />
⎪⎩<br />
u(x,0) = ϕ(x).<br />
6. Posto D = { x 2 +y 2 < r 2} , con r > 0, risolvere il prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong><br />
{<br />
uxx +u yy = 0, in D,<br />
u |∂D = f,<br />
con f assegnata su ∂D.<br />
7. Siano ω > 0 e c > 0 assegnati. Trovare <strong>le</strong> soluzioni del prob<strong>le</strong>ma<br />
{<br />
ut (x,t) = cu xx (x,t), x ∈ (0,+∞), t ∈ R<br />
u(0,t) = sin(ωt),<br />
che siano T-<strong>per</strong>io<strong>di</strong>che in t (con T = 2π/ω) e limitate.<br />
8. Calcolare la trasformata <strong>di</strong> Fourier del<strong>le</strong> seguenti funzioni:<br />
f(x) = e −α|x|<br />
f(x) =<br />
(con α > 0 fissato).<br />
{<br />
e −αx , se x ≥ 0,<br />
0, se x < 0,<br />
9. Calcolare i momenti della <strong>di</strong>stribuzione norma<strong>le</strong> a me<strong>di</strong>a nulla:<br />
∫<br />
1 +∞<br />
√ x r e −x2 /2σ 2 dx,<br />
2πσ<br />
2<br />
−∞
APPENDICE B. ESERCIZI 113<br />
con r ≥ 0 intero (e σ > 0 fissato).<br />
10. Calcolare la trasformata <strong>di</strong> Fourier del<strong>le</strong> funzione<br />
{<br />
1−|x|, se |x| ≤ 1,<br />
Λ(x) =<br />
0, se |x| > 1.<br />
11. Utilizzare il risultato del precedente esercizio <strong>per</strong> calcolare<br />
<strong>per</strong> ogni intero r ≥ 0.<br />
∫ +∞<br />
−∞<br />
x r Λ(x)dx<br />
12. Posto R = { (x,y) ∈ R 2 | 0 ≤ x ≤ π } , risolvere il seguente prob<strong>le</strong>ma <strong>di</strong><br />
<strong>di</strong>ffusione su R:<br />
⎧<br />
⎪⎨<br />
u t (x,y,t) = ∆u(x,y,t), (x,y) ∈ R, t > 0,<br />
u(0,y,t) = u(π,y,t) = 0,<br />
⎪⎩<br />
u(x,y,0) = ϕ(x,y).<br />
13. Risolvere il seguente prob<strong>le</strong>ma <strong>di</strong>fferenzia<strong>le</strong>:<br />
{<br />
ut (x,t) = au xx (x,t)+bu x (x,t)+cu(x,t), x ∈ R, t > 0,<br />
u(x,0) = ϕ(x),<br />
con a, b e c costanti assegnate.<br />
14. Risolvere il seguente prob<strong>le</strong>ma <strong>di</strong> <strong>di</strong>ffusione sulla retta con coefficiente <strong>di</strong><br />
<strong>di</strong>ffusione e sorgente <strong>di</strong>pendenti dal tempo:<br />
{<br />
ut (x,t) = a(t)u xx (x,t)+b(t), x ∈ R, t > 0,<br />
u(x,0) = ϕ(x).<br />
15. Risolvere il prob<strong>le</strong>ma integro-<strong>di</strong>fferenzia<strong>le</strong><br />
⎧ ∫ +∞<br />
⎪⎨ u t (x,t) = − u(x−y,t)u(y,t)dy, x ∈ R, t > 0,<br />
⎪⎩<br />
u(x,0) = δ(x),<br />
dove δ è la delta <strong>di</strong> Dirac.<br />
−∞
APPENDICE B. ESERCIZI 114<br />
16. Dimostrare che tutte <strong>le</strong> soluzioni dell’equazione <strong>di</strong>fferenzia<strong>le</strong><br />
u t (x,t) = i∆u(x,t), x ∈ R N , t > 0,<br />
hanno norma L 2 (rispetto a x) costante (rispetto a t).<br />
17. Consideriamo il cambio <strong>di</strong> coor<strong>di</strong>nate lineare in R N<br />
x ′ = Ax,<br />
A ∈ GL(N).<br />
Trovare come sono <strong>le</strong>gate <strong>le</strong> trasformate <strong>di</strong> Fourier nei due sistemi e utilizzare<br />
questo risultato <strong>per</strong> <strong>di</strong>mostrare che il Laplaciano è invariante <strong>per</strong> rotazioni.<br />
18. Calcolare<br />
lim<br />
ǫ→0<br />
ǫ<br />
ǫ 2 +x 2 .<br />
19. Sia g ∈ C 1 (R). Calcolare la derivata <strong>di</strong>stribuziona<strong>le</strong> della funzione<br />
u(x) = sgn(x)g(x), dove ricor<strong>di</strong>amo che la funzione “segno” è così definita:<br />
⎧ x<br />
⎨ , se x ≠ 0,<br />
sgn(x) = |x|<br />
⎩<br />
0, se x = 0,<br />
20. Sia g ∈ C 1 (R) ta<strong>le</strong> che g(0) = 0, g ′ (x) ≠ 0,∀ x ∈ R e lim |x|→∞ |g(x)| =<br />
+∞. Calcolare<br />
1<br />
lim √ e −g2 (x)/2σ 2 .<br />
σ→0 + 2πσ<br />
21. Sia g ∈ C 1 (R) ta<strong>le</strong> che g(x 0 ) = 0, g ′ (x) ≠ 0,∀ x ∈ R. Calcolare la derivata<br />
<strong>di</strong>stribuziona<strong>le</strong> <strong>di</strong> f(x) = H(g(x)) (dove H è la funzione <strong>di</strong> Heaviside).<br />
22. Dare un significato all’espressione δ(x 2 −1) (nel senso <strong>di</strong> “composizione”<br />
della “funzione” delta <strong>di</strong> Dirac con la funzione x 2 −1).<br />
23. SiaH lafunzione<strong>di</strong> Heavisideeϕ ∈ S(R) unafunzione testpari. Calcolare<br />
〈Ĥ,ϕ〉.<br />
24. Calcolare la trasformata <strong>di</strong> Fourier del<strong>le</strong> funzioni<br />
f(x,y) = e −x2 /2 cosy,<br />
g(x,y) = xe −y2 .
APPENDICE B. ESERCIZI 115<br />
25. Si consideri la <strong>di</strong>stribuzione f su R 2 così definita:<br />
〈f,ϕ〉 :=<br />
∫ +∞<br />
−∞<br />
1. Dimostrare che f è singolare;<br />
2. calcolarne il gra<strong>di</strong>ente <strong>di</strong>stribuziona<strong>le</strong>;<br />
3. calcolarne la trasformata <strong>di</strong> Fourier.<br />
ϕ(0,y)dy, ∀ ϕ ∈ D(R 2 ).<br />
26. Si consideri la <strong>di</strong>stribuzione f su R 2 così definita:<br />
〈f,ϕ〉 :=<br />
Calcolare ˆf.<br />
∫ +∞<br />
−∞<br />
ϕ(t,t)dt, ∀ ϕ ∈ D(R 2 ).<br />
27. Si consideri la <strong>di</strong>stribuzione f su R 2 così definita:<br />
〈f,ϕ〉 :=<br />
Calcolare ˆf.<br />
∫ 1<br />
0<br />
ϕ(x,0)dx, ∀ ϕ ∈ D(R 2 ).<br />
28. Risolvere il prob<strong>le</strong>ma integro-<strong>di</strong>fferenzia<strong>le</strong><br />
⎧ ∫ 1<br />
⎪⎨ u t (x,t) = xyu(y,t)dy, x ∈ [0,1], t ∈ R,<br />
0<br />
⎪⎩<br />
u(x,0) = ϕ(x).<br />
29. Sia p(x) una densità <strong>di</strong> probabilità su R. Risolvere il prob<strong>le</strong>ma integro<strong>di</strong>fferenzia<strong>le</strong><br />
⎧ ∫ +∞<br />
⎪⎨ u t (x,t) = p(x) u(y,t)dy −u(x,t), x ∈ R, t ∈ R,<br />
⎪⎩<br />
u(x,0) = ϕ(x).<br />
−∞<br />
30. Sia B ⃗ ∈ R 3 fissato. Risolvere<br />
⎧<br />
⎨ d<br />
dt ⃗v(t) = B ⃗ ∧⃗v(t), t ∈ R.<br />
⎩<br />
⃗v(0) =⃗v 0 .
APPENDICE B. ESERCIZI 116<br />
31. Sia ⃗ν un versore fissato in R N e sia Π la proiezione ortogona<strong>le</strong> sul<br />
sottospazio generato da ⃗ν. Calcolare e tΠ .<br />
32. Trovare il semigruppo associato al sistema <strong>di</strong> equazioni<br />
{<br />
ut = −iv x ,<br />
v t = iu x , x ∈ R, t ∈ R.<br />
33. Trovare i semigruppi associati al prob<strong>le</strong>ma della <strong>di</strong>ffusione nella sbarretta<br />
con con con<strong>di</strong>zioni <strong>di</strong> Dirich<strong>le</strong>t<br />
{<br />
ut (x,t) = c 2 u xx (x,t), x ∈ (0,l), t > 0,<br />
u(0,t) = u(l,t) = 0, t ≥ 0,<br />
e con con<strong>di</strong>zioni <strong>di</strong> Neumann<br />
{<br />
ut (x,t) = c 2 u xx (x,t), x ∈ (0,l), t > 0,<br />
u x (0,t) = u x (l,t) = 0, t ≥ 0,<br />
e utilizzarli <strong>per</strong> risolvere tali prob<strong>le</strong>mi in presenza <strong>di</strong> un termine <strong>di</strong> sorgente<br />
q(x,t) assegnato (ovvero <strong>per</strong> l’equazione u t (x,t) = c 2 u xx (x,t)+q(x,t)).<br />
34. Sia X = L 1 (R) e consideriamo l’o<strong>per</strong>atore lineare A : D(A) ⊂ X → X<br />
così definito:<br />
D(A) = {u ∈ X | u ′ ∈ X}<br />
Au = u ′ −αu, ∀ u ∈ D(A).<br />
(con α > 0 fissato). Trovare l’insieme risolvente <strong>di</strong> A.<br />
35. Sia X = C 0 ([0,+∞)) (lo spazio <strong>di</strong> Banach del<strong>le</strong> funzioni continue e<br />
limitate su [0,+∞) con la norma del sup). Consideriamo l’o<strong>per</strong>atore lineare<br />
A : D(A) ⊂ X → X così definito:<br />
D(A) = {u ∈ X | u ′ ∈ X e u(0) = 0}<br />
Au = −u ′ , ∀ u ∈ D(A).<br />
Trovare l’insieme risolvente <strong>di</strong> A. L’o<strong>per</strong>atore −A (definito sullo stesso dominio<br />
D(A)) può essere generatore <strong>di</strong> un semigruppo su X?
Bibliografia<br />
- Testi <strong>di</strong> carattere genera<strong>le</strong> sui meto<strong>di</strong> matematici -<br />
[1] M. Reed, B. Simon, Methods of Modern Mathematical Physics (4 volumi)<br />
Academic Press, 1972-1978.<br />
[2] G. Arfken, Mathematical methods for physicists, Academic press, 1985.<br />
[3] R. Dautray, J. L. Lions, Mathematical analysis and numerical methods for<br />
science and technology (6 volumi), Springer-Verlag, 1992.<br />
[4] J. Mathews, R. L. Walker, Mathematical methods of physics, Benjamin,<br />
1973.<br />
[5] A. Tichonov, A. Samarskij, Equazioni della fisica matematica, MIR, 1981.<br />
- Testi <strong>di</strong> riferimento <strong>di</strong> analisi -<br />
[6] H. Brezis, Analisi funziona<strong>le</strong> Liguori, 1986.<br />
[7] L.C. Evans, Partial <strong>di</strong>fferential equations, AmericanMathematicalSociety,<br />
1999.<br />
[8] E. Giusti, Analisi Matematica 2, Boringhieri, 1986.<br />
[9] W. Ru<strong>di</strong>n, Real and comp<strong>le</strong>x analysis, McGraw-Hill, 1987.<br />
[10] W. Ru<strong>di</strong>n, Functional analysis McGraw-Hill, 1991.<br />
- Specifici sul<strong>le</strong> serie <strong>di</strong> Fourier -<br />
[11] A. Kufner, J.Kad<strong>le</strong>k, Fourier series, Iliffe Books, 1971.<br />
[12] A. Zygmund, Trigonometric series, Second e<strong>di</strong>tion, Cambridge University<br />
Press, 1968.<br />
- Specifici sul<strong>le</strong> funzioni speciali -<br />
[13] M. A. Al-Gwaiz, Sturm-Liouvil<strong>le</strong> Theory and its applications, Springer,<br />
2008.<br />
[14] N. Lebedev, Special functions and their applications, Prentice-Hall, 1965.<br />
117
BIBLIOGRAFIA 118<br />
[15] A. Zettl, Sturm-Liouvil<strong>le</strong> Theory, “Mathematical Surveys and Monographs”<br />
Vol. 121, AMS, 2005.<br />
- Specifici sul<strong>le</strong> trasformate <strong>di</strong> Fourier -<br />
[16] R. Bracewell, The Fourier transform and its applications, McGraw-Hill,<br />
1986.<br />
- Teoria del<strong>le</strong> <strong>di</strong>stribuzioni -<br />
[17] I. M.Gelfand, G. E.Shilov, Generalized functions (Vol. 1), AcademicPress,<br />
1964.<br />
[18] L. Schwartz, Théorie des <strong>di</strong>stributions, Hermann, 1966.<br />
[19] R. Strichartz, A guide to <strong>di</strong>stribution theory and Fourier transforms, CRC<br />
Press, 1994.<br />
[20] A. Zemanian, Distribution theory and transform analysis, Dover, 1965.<br />
- Teoria dei semigruppi -<br />
[21] J. Banasiak, L. Arlotti, Perturbations of positive semigroups with<br />
applications, Springer Verlag, 2006.<br />
[22] A.Bel<strong>le</strong>ni-Morante,Applied semigroups and evolution equations, Clarendon<br />
Press, 1979.<br />
[23] K. J. Engel, R. Nagel, One-parameter semigroups for linear evolution<br />
equations, Springer Verlag, 2000.<br />
[24] A. Pazy, Semigroups of Linear O<strong>per</strong>ators and Applications to Partial<br />
Differential Equations, Springer Verlag, 1983.<br />
- <strong>Applicazioni</strong> -<br />
[25] B. H. Bransden, C. J. Joachain, Introduction to quantum mechanics,<br />
Longman, 1989.<br />
[26] J. S. Duderstadt, W. R. Martin, Transport Theory, Wi<strong>le</strong>y-Interscience,<br />
1979.<br />
[27] J. D. Jackson, E<strong>le</strong>ttro<strong>di</strong>namica classica, Zanichelli, 1984.<br />
- Letture comp<strong>le</strong>mentari -<br />
[28] V. I. Arnold, Lectures on partial <strong>di</strong>fferential equations, Springer. 2004 .<br />
- Siti web interessanti -<br />
[29] http://mathworld.wolfram.com/ (Wolfram Mathworld).<br />
[30] http://turnbull.dcs.st-and.ac.uk/history/ (The MacTutor history<br />
of mathematics archive).
BIBLIOGRAFIA 119<br />
[31] www.shef.ac.uk/chemistry/orbitron/ (The Orbitron: a gal<strong>le</strong>ry of<br />
atomic and mo<strong>le</strong>cular orbitals).