

Meccanismi con camme
Meccanismi con camme
Meccanismi con camme

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
0HFFDQLVPL FRQ FDPPH<br />
• 0HFFDQLVPL DWWL D WUDVIRUPDUH LO PRYLPHQWR<br />
o Moto rotatorio <strong>con</strong>tinuo in rotatorio alterno<br />
o Moto rotatorio <strong>con</strong>tinuo in moto alterno<br />
o Moto <strong>con</strong>tinuo in alterno (sagome)<br />
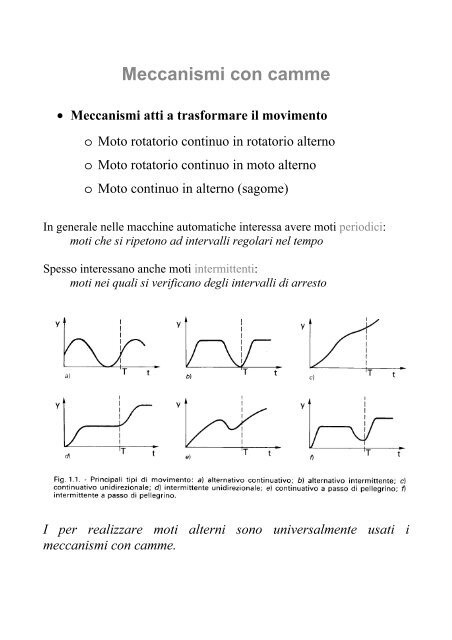
In generale nelle macchine automatiche interessa avere moti periodici:<br />
PRWL FKH VL ULSHWRQR DG LQWHUYDOOL UHJRODUL QHO WHPSR<br />
Spesso interessano anche moti intermittenti:<br />
PRWL QHL TXDOL VL YHULILFDQR GHJOL LQWHUYDOOL GL DUUHVWR<br />
, SHU UHDOL]]DUH PRWL DOWHUQL VRQR XQLYHUVDOPHQWH XVDWL L<br />
PHFFDQLVPL FRQ FDPPH
HJJL GL PRWR GHO FHGHQWH<br />
In genere è imposta la legge di moto del cedente<br />
\ \(W)<br />
oppure si impone una legge che lega la posizione del cedente <strong>con</strong><br />
la posizione angolare dell’albero (es. sistema camma-valvola)<br />
\ \(θ )<br />
θ Ω îW (Ω = velocità angolare albero)<br />
È anche frequente il caso in cui siano date soltanto alcune<br />
caratteristiche della legge (es. alzata valvola e fasi di apertura).<br />
• 9HORFLWj HG DFFHOHUD]LRQH GHO FHGHQWH FDVR JHQHUDOH<br />
G \ G \ Gθ<br />
G \<br />
\ ( W)<br />
= = = Ω<br />
G W Gθ<br />
G W Gθ<br />
2<br />
2<br />
G \ G ⎛ G \ ⎞ G Ω G \ G \ 2 G \<br />
\ ( W)<br />
= = ⎜<br />
⎟ Ω + = Ω + Ω<br />
2<br />
2<br />
G W G W ⎝ Gθ<br />
⎠ G W Gθ<br />
Gθ<br />
Gθ<br />
• 9HORFLWj HG DFFHOHUD]LRQH GHO FHGHQWH Ω FRVWDQWH<br />
2<br />
\ ( W)<br />
= Ω \ ′ ; \ ( W)<br />
= Ω \ ′<br />
2<br />
G \ G \<br />
\ ′<br />
= ; \ ′<br />
=<br />
Gθ<br />
Gθ<br />
dove 2
Fasi del moto<br />
• Si possono determinare in termini di posizione angolare<br />
• Si possono determinare in termini temporali<br />
In generale si hanno fasi di: salita (o alzata), discesa (o ritorno),<br />
riposo.
β=angolo di<br />
alzata
Analisi cinematica: meccanismi equivalenti<br />
Si può sostituire al meccanismo <strong>con</strong> camma un opportuno<br />
meccanismo equivalente composto da coppie elementari.<br />
La sostituzione ha un carattere “locale”.<br />
Esempio Figura a)<br />
• La camma ruota attorno ad O1<br />
• La camma è circolare <strong>con</strong> centro A non coincidente <strong>con</strong> O1<br />
• Le distanze AB, AO1 e BO2 restano costanti<br />
• Il quadrilatero articolato O1ABO2 (Figura b) rispetta le<br />
distanze descritte per il meccanismo camma-bilanciere<br />
• Il quadrilatero O1ABO2 è cinematicamente equivalente<br />
o Il moto di B resta lo stesso
Il procedimento si può generalizzare a meccanismi <strong>con</strong> profili<br />
generici, nel qual caso resta valido soltanto nella posizione<br />
analizzata.<br />
Esempio.<br />
• Due corpi incernierati in O1 e O2<br />
• I centri di curvatura dei profili nel punto di <strong>con</strong>tatto siano A e<br />
B.<br />
• Il quadrilatero O1ABO2 è cinematicamente equivalente al<br />
meccanismo originario<br />
• Velocità ed accelerazione angolare del cedente possono<br />
essere calcolate come la velocità e l’accelerazione dell’asta<br />
BO2<br />
• Il procedimento deve essere ripetuto per ogni posizione
MECCANISMI EQUIVALENTI













