

L'inverter NPC in azionamenti di MT per motori asincroni - DimacReD
L'inverter NPC in azionamenti di MT per motori asincroni - DimacReD
L'inverter NPC in azionamenti di MT per motori asincroni - DimacReD

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.4.2 Tecniche Vettoriali<br />
Se l‟azionamento elettrico richiede elevate prestazioni d<strong>in</strong>amiche, si utilizza un controllo <strong>di</strong> tipo<br />
vettoriale a orientamento <strong>di</strong> campo oppure quello che va sotto il nome <strong>di</strong> DTC (controllo <strong>di</strong>retto <strong>di</strong><br />
coppia). Il controllo gestisce e governa il regime d<strong>in</strong>amico del motore basandosi sul modello<br />
equivalente bifase a collettore della macch<strong>in</strong>a as<strong>in</strong>crona. In questi <strong>azionamenti</strong> le grandezze<br />
primarie <strong>di</strong> controllo sul motore elettrico sono la coppia e il flusso, <strong>di</strong> statore, <strong>di</strong> rotore o <strong>di</strong> mutua a<br />
seconda degli schemi <strong>di</strong> controllo. La necessità <strong>di</strong> controllare contemporaneamente due grandezze è<br />
dettata dalla natura stessa della macch<strong>in</strong>a as<strong>in</strong>crona poiché la corrente assorbita dallo statore è al<br />
tempo stesso responsabile del flusso e della coppia.<br />
Il controllo a orientamento <strong>di</strong> campo<br />
L‟azionamento misura le grandezze elettriche con cui è alimentato il motore <strong>per</strong> stimare la<br />
posizione angolare del campo magnetico rotante generato dalle correnti rotoriche. Una volta<br />
<strong>in</strong><strong>di</strong>viduato l‟orientamento del campo rotorico, attraverso l‟uso <strong>di</strong> algoritmi vengono generate le<br />
correnti statoriche necessarie a far funzionare il motore con la coppia richiesta. Il controllo richiede<br />
qu<strong>in</strong><strong>di</strong> la conoscenza accurata dei parametri del motore. Questi servono aff<strong>in</strong>ché il modello del<br />
motore possa fornire <strong>in</strong> tempo reale quelle grandezze utili al controllo, ma non <strong>di</strong>sponibili dai<br />
sensori.<br />
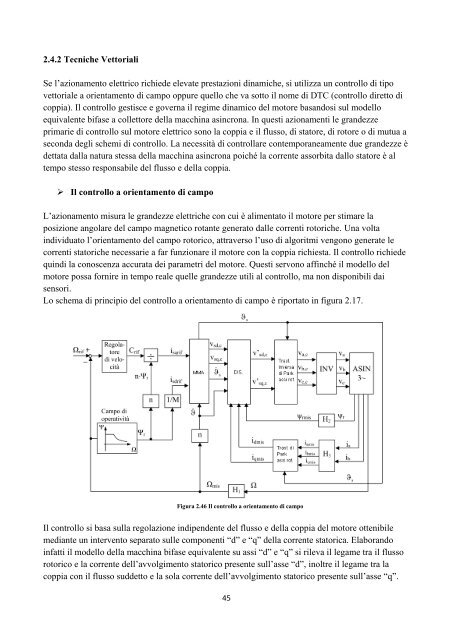
Lo schema <strong>di</strong> pr<strong>in</strong>cipio del controllo a orientamento <strong>di</strong> campo è riportato <strong>in</strong> figura 2.17.<br />
Figura 2.46 Il controllo a orientamento <strong>di</strong> campo<br />
Il controllo si basa sulla regolazione <strong>in</strong><strong>di</strong>pendente del flusso e della coppia del motore ottenibile<br />
me<strong>di</strong>ante un <strong>in</strong>tervento separato sulle componenti “d” e “q” della corrente statorica. Elaborando<br />
<strong>in</strong>fatti il modello della macch<strong>in</strong>a bifase equivalente su assi “d” e “q” si rileva il legame tra il flusso<br />
rotorico e la corrente dell‟avvolgimento statorico presente sull‟asse “d”, <strong>in</strong>oltre il legame tra la<br />
coppia con il flusso suddetto e la sola corrente dell‟avvolgimento statorico presente sull‟asse “q”.<br />
45