Ruote dentate - Corsi di Laurea a Distanza - Politecnico di Torino
Ruote dentate - Corsi di Laurea a Distanza - Politecnico di Torino
Ruote dentate - Corsi di Laurea a Distanza - Politecnico di Torino

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
CONDIZ. TAGLIO<br />
<strong>Politecnico</strong> <strong>di</strong> <strong>Torino</strong><br />
CeTeM<br />
Elementi Costruttivi delle Macchine<br />
Dispense integrative sulle ruote<br />
<strong>dentate</strong><br />
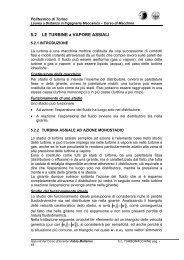
Poniamoci in con<strong>di</strong>zioni limite: troncatura esterna della dentiera utensile (linea parallela a<br />
linea <strong>di</strong> riferimento passanti per estremi del tratto rettilineo del fianco del coltello) passanti<br />
per T1, e <strong>di</strong>stanti K’m0 da linea primitiva della dentiera utensile. Si osservi la figura: è<br />
2<br />
m<br />
⎛Z 0<br />
1sin α ⎞ 0<br />
HC = Km ' 0 = TO 1 sinα0;<br />
ma TC 1 = OC 1 sinα0 = Z1<br />
sinα0<br />
e quin<strong>di</strong>: K'm0 = ⎜ ⎟m0,<br />
2<br />
⎝ 2 ⎠<br />
2K' per cui è (con<strong>di</strong>zione limite) Z1<br />
= . 2<br />
sin α0<br />
2<br />
Per ruote <strong>di</strong> serie: K'=1→<br />
Z1min<br />
= ed essendo α0=20°, Z1 17 (17.09726). Volendo<br />
2<br />
sin α<br />
© <strong>Politecnico</strong> <strong>di</strong> <strong>Torino</strong> Pagina 11 <strong>di</strong> 19<br />
Data ultima revisione 26/11/03 Autore: Giovanni Roccati<br />
0<br />
comunque tagliare ruote con z1 < z1minserie<br />
, senza interferenza al piede del dente, da<br />
Z<br />
2K' sin α<br />
= , ricavo ' ( 1 )<br />
1 2<br />
0<br />
2<br />
sin α0<br />
z1<br />
z1<br />
K = − X1 = Z1<br />
= e quin<strong>di</strong> X1<br />
= 1−<br />
.<br />
2 z1minserie<br />
z1minserie<br />
SCELTA COEFFICIENTI SPOSTAMENTO X1, X2<br />
PRESCRIZIONI: Verifica norme DIN (Giovannozzi, COSTRUZIONI DI MACCHINE, Vol II,<br />
Cap. I)..<br />
Diagrammi <strong>di</strong> Henriot (testo Trattato Teorico e pratico degli Ingranaggi).<br />
zi<br />
Formule Merrit (BSS) ( ziv<br />
= ) :<br />
3<br />
cos β