I controlli automatici – Ia parte - Itisfocaccia.It
I controlli automatici – Ia parte - Itisfocaccia.It
I controlli automatici – Ia parte - Itisfocaccia.It

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1 <strong>–</strong> Generalità sui sistemi di controllo<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong><br />
Col termine processo nell’impiantistica chimica si intende un insieme di operazioni eseguite su una<br />
certa quantità di materia allo scopo di modificarne in tutto o in <strong>parte</strong> alcune proprietà<br />
(caratteristiche fisiche, composizione chimica, contenuto di energia, ecc.).<br />
Ogni processo può essere descritto da grandezze fisiche alcune delle quali rimangono costanti<br />
perché si riferiscono alla geometria o alle modalità costruttive delle apparecchiature impiegate,<br />
oppure rappresentano caratteristiche proprie del materiale utilizzato che non sono interessate da<br />
modifiche a causa del processo stesso.<br />
Altre grandezze, invece, possono cambiare il proprio valore nel corso del processo e pertanto<br />
costituiscono le cosiddette variabili di processo.<br />
Le variabili di processo possono essere distinte in tre gruppi:<br />
1. variabili di disturbo (loads): sono quelle grandezze il cui valore può cambiare per cause<br />
indipendenti dalla volontà di chi gestisce il processo e quindi in modo imprevedibile;<br />
2. variabili controllate: sono le grandezze la cui variazione (dovuta al cambiamento subito<br />
dalle variabili di disturbo) deve essere attentamente monitorata. Dal valore assunto da tali<br />
variabili dipende infatti l’efficacia del processo stesso in termini del raggiungimento degli<br />
obiettivi prefissati;<br />
3. variabili manipolate: rappresentano le grandezze su cui è possibile operare e che consentono<br />
(se modificate opportunamente) di riportare le variabili controllate al valore originario che<br />
esse avevano prima che si manifestasse il disturbo. Tale valore, fissato in base alle necessità<br />
che il processo deve soddisfare oppure ai limiti delle macchine utilizzate o, ancora, a<br />
considerazioni di convenienza economica, viene detto set-point.<br />
Un sistema di controllo automatico di un processo è un insieme di apparecchiature che ha lo scopo<br />
di mantenere una variabile controllata sul suo valore di set-point anche in presenza di disturbi. Esso<br />
è formato da tre elementi:<br />
1. strumento di misura: serve a definire, in ogni istante, il valore assunto dalla variabile<br />
controllata;<br />
2. controllore: confronta il valore letto dallo strumento di misura con quello impostato di setpoint<br />
e calcola quindi l’errore ε. Nel caso ε sia diverso da zero, il controllore agisce secondo<br />
una certa legge sul terzo elemento del sistema di controllo;<br />
3. elemento finale di controllo (organo finale di regolazione). È di norma formato da due parti,<br />
la prima delle quali (attuatore o servomotore) riceve il segnale dal controllore modificando<br />
quindi lo stato della seconda (quasi sempre una valvola di regolazione).<br />
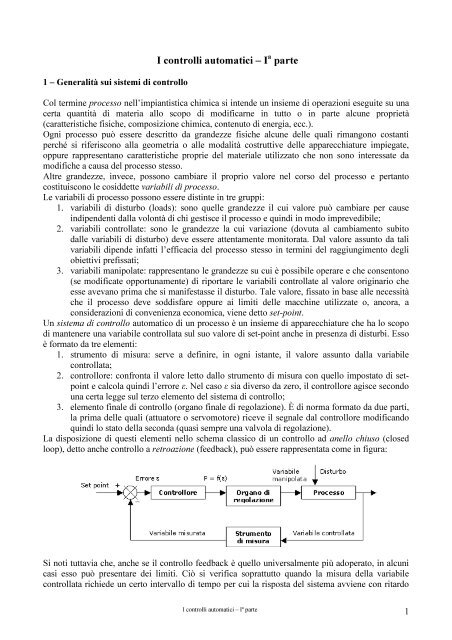
La disposizione di questi elementi nello schema classico di un controllo ad anello chiuso (closed<br />
loop), detto anche controllo a retroazione (feedback), può essere rappresentata come in figura:<br />
Si noti tuttavia che, anche se il controllo feedback è quello universalmente più adoperato, in alcuni<br />
casi esso può presentare dei limiti. Ciò si verifica soprattutto quando la misura della variabile<br />
controllata richiede un certo intervallo di tempo per cui la risposta del sistema avviene con ritardo<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 1
ispetto al disturbo. In tal caso può essere conveniente adoperare un controllo ad anello aperto<br />
(open loop) in cui questa volta ad essere misurata è la variabile di disturbo mentre il controllore<br />
agisce (tramite l’elemento finale) sempre sulla variabile manipolata.<br />
2 <strong>–</strong> Tipi di controllori<br />
I controllori possono essere classificati, in base all'azione che essi esplicano sull'organo di<br />
regolazione, in 5 categorie:<br />
a) controllori tutto <strong>–</strong> niente (On <strong>–</strong> Off)<br />
b) controllori di tipo proporzionale P<br />
c) controllori di tipo proporzionale-integrale PI<br />
d) controllori di tipo proporzionale-derivativo PD<br />
e) controllori di tipo proporzionale-integrale-derivativo PID<br />
2.1 <strong>–</strong> Controllori tutto-niente (On-Off)<br />
Sono gli strumenti più semplici e meno costosi. Essi azionano la valvola di regolazione (o attaccano<br />
una pompa o una resistenza elettrica) quando il valore della grandezza in regolazione scende sotto il<br />
valore voluto di una certa quantità. Chiudono poi la valvola quando la grandezza ha superato il<br />
valore desiderato sempre di una certa quantità. Si dice differenziale la differenza fra i due punti di<br />
intervento. Quanto più il differenziale è basso tanto più sono frequenti gli attacca e stacca, ma tanto<br />
minori sono gli scostamenti dal valore voluto. Ovviamente i vari interventi sollecitano le<br />
apparecchiature, per cui il differenziale deve avere un valore ragionevole. La taratura dello<br />
strumento consiste nella semplice regolazione del valore differenziale. Il controllo on-off non<br />
consentirà mai alla variabile controllata, in presenza di un disturbo permanente, di mantenere con<br />
continuità il valore di set-point ma le permetterà solo di oscillare, con ampiezza e periodo<br />
dipendenti dal differenziale impostato, intorno a tale valore.<br />
2.2 <strong>–</strong> Controllori ad azione proporzionale (P)<br />
Questi strumenti correggono la valvola di regolazione di una quantità proporzionale all'errore,<br />
inteso come differenza tra il valore impostato di set-point e quello misurato, secondo una legge del<br />
tipo:<br />
= s + P K p p<br />
⋅ε<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 2
dove ε è l’errore, p è il segnale in uscita dal controllore (normalmente una pressione), ps il segnale<br />
in condizioni stazionarie (ossia in assenza di errore), KP una costante chiamata guadagno<br />
proporzionale (proportional gain). All’aumentare del guadagno aumenta la sensibilità e la rapidità<br />
del controllore il cui intervento, a parità di disturbo, diventa più marcato. Tuttavia un valore troppo<br />
elevato per KP può determinare, in taluni casi, un comportamento oscillatorio, e quindi<br />
potenzialmente instabile, del sistema.<br />
Poiché l’azione del controllore proporzionale presuppone l’esistenza dell’errore, si verifica che, nel<br />
caso di un disturbo (e quindi di un errore) prolungato nel tempo, il sistema di controllo non è in<br />
grado di riportare la variabile controllata al valore di regime che essa aveva prima che si verificasse<br />
il disturbo. Il sistema porterà detta variabile su un valore prossimo a quello originario (tanto più<br />
vicino quanto maggiore è il KP) ma che non sarà mai lo stesso. Questo è il principale limite del<br />
controllo proporzionale, limite che può essere superato solo ricorrendo all’aggiunta dell’azione<br />
integrale a quella proporzionale. Occorre ora accennare al significato di banda proporzionale<br />
(proportional band), termine presente in molti testi sulla teoria dei <strong>controlli</strong> <strong>automatici</strong>.<br />
Dalla funzione di uscita di un controllore proporzionale:<br />
= s + P ⋅ε<br />
K p p<br />
ricaviamo:<br />
p = p + K ⋅ε<br />
= p + K ⋅ SP −VM<br />
max<br />
s<br />
P<br />
max<br />
s<br />
P<br />
( min )<br />
( SP −VM<br />
)<br />
pmin<br />
= ps<br />
+ K P ⋅ε<br />
min = ps<br />
+ K P ⋅<br />
max<br />
Dove SP è il valore di set point e VM è il valore misurato della variabile controllata.<br />
Sottraendo membro a membro:<br />
pmax − pmin<br />
= K P ⋅(<br />
VM max −VM<br />
min )<br />
Si definisce banda proporzionale BP di un controllore la differenza tra il massimo ed il minimo<br />
valore della variabile controllata capaci di modificare il segnale di uscita del controllore dal valore<br />
più elevato (per controllori pneumatici di solito 15 PSI, 1.05 bar) a quello più basso (3 PSI, 0.2 bar).<br />
Avremo quindi:<br />
∆p<br />
BP = ( VM max −VM<br />
min ) =<br />
K<br />
P<br />
ossia la banda proporzionale BP è inversamente proporzionale al guadagno KP. Il guadagno KP quindi<br />
determina sia la velocità di risposta del sistema di controllo che il range di valori della variabile controllata<br />
entro cui può agire la regolazione.<br />
Per capire ciò basta rappresentare su un grafico la pressione p in uscita dal controllore in funzione<br />
dell’errore ε. Stabiliti i valori massimo pmax e minimo pmin della pressione in uscita rispetto al valore<br />
di riferimento ps (pressione in uscita per valore della variabile controllata uguale al set-point,<br />
ovvero pressione corrispondente a errore nullo) tracciamo una retta che, passando per il valore di<br />
riferimento, unisce i due valori (pmax e pmin).<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 3
Possiamo individuare l’intervallo d’errore che il sistema è in grado di correggere. Poichè per un<br />
punto passano infinite rette, cambiando la retta cambia anche l’angolo α e, quindi, cambia anche la<br />
banda proporzionale. Infatti tg(α) = KP pertanto in base all’angolazione della retta è possibile<br />
stabilire un KP più o meno elevato.<br />
Ad ogni valore della variabile controllata entro la banda proporzionale, corrisponde un solo valore<br />
del segnale p in uscita dal controllore e quindi una sola posizione dell'elemento finale (valvola).<br />
All’esterno della banda proporzionale, invece, l’apertura della valvola si porta nelle posizioni limite<br />
di funzionamento (apertura 0% e 100%).<br />
Da quanto detto si deduce che:<br />
▫ Aumentando il guadagno KP miglioriamo la velocità di risposta, ma riduciamo la banda<br />
proporzionale;<br />
▫ Diminuendo il guadagno allarghiamo il campo degli errori su cui il regolatore può agire, a<br />
discapito della velocità di risposta.<br />
Maggiore è la velocità di reazione, minore è la capacità di rilevare gli errori.<br />
Spesso la banda proporzionale è espressa come percentuale BP% del campo di misura del<br />
regolatore (range dello strumento di misura), definita nel seguente modo:<br />
( VM max −VM<br />
min ) ∆p<br />
1<br />
BP % =<br />
⋅100<br />
= ⋅<br />
⋅<br />
V −V<br />
K V −V<br />
( ) ( ) 100<br />
fondo scala inizio scala<br />
P fondo scala inizio scala<br />
Dove Vfondo scala e Vinizio scala sono gli estremi sulla scala dello strumento di misura adoperato.<br />
Ad esempio se uno strumento ha un campo di misura da 0 a 100 e la relativa valvola di controllo<br />
viene spostata da un estremo (tutto chiuso) all'altro (tutto aperto) nel campo da 25 a 75, l'ampiezza<br />
della banda proporzionale è di:<br />
( 75 − 25)<br />
BP % = ⋅100<br />
= 50%<br />
( 100 − 0)<br />
Il valore di set point della variabile controllata si trova entro la banda proporzionale e di solito non<br />
lontano dal suo centro. È importante tenere presente che, a banda proporzionale uguale a zero (o, il<br />
che è lo stesso, a KP = ∞), lo strumento funziona come regolatore tutto-niente.<br />
2.3 <strong>–</strong> Controllori ad azione proporzionale-integrale (PI)<br />
Oltre all'azione proporzionale gli strumenti di precisione sono dotati di azione integrale. Questa<br />
agisce tenendo conto dell'errore e del tempo in cui è presente. L'azione integrale interviene quindi in<br />
misura proporzionale all’errore e alla durata di quest’ultimo (espressa come integrale dell’errore<br />
rispetto al tempo). I controllori pneumatici di tipo PI emettono un segnale:<br />
+ ⋅ + = p p K ε<br />
K<br />
s<br />
P<br />
I<br />
⋅<br />
t<br />
∫ ⋅ ε<br />
0<br />
dt<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 4
La costante KI è detta guadagno integrale. Poiché, in pratica, l’azione integrale si basa sulla somma<br />
degli errori passati e non si annulla quando l’errore si azzera, sarà inevitabile che la grandezza<br />
regolata superi il valore di set-point fino a che l’inversione nel segno dell’errore riporterà<br />
gradualmente tale grandezza nuovamente al valore di regime. Il comportamento del sistema diventa<br />
quindi oscillatorio e potenzialmente instabile.<br />
Si definisce overshoot il rapporto A/B tra la massima ampiezza raggiunta dall’oscillazione ed il<br />
valore di regime. Si denomina altresì decay ratio il rapporto C/A tra due picchi consecutivi<br />
raggiunti dal valore della grandezza controllata.<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 5
2.4 <strong>–</strong> Controllori ad azione proporzionale-derivativa (PD)<br />
L'azione derivativa, detta anche azione di anticipo perché tende a prevedere quale sarà l’errore nel<br />
futuro, interviene ogni qualvolta si ha una brusca variazione della grandezza sotto controllo e<br />
l'intervento è tanto più massiccio quanto più rapida è tale variazione. Anche questa azione, come<br />
quella proporzionale, si annulla quando l’errore scompare e quindi, in base a quanto detto per il<br />
controllo proporzionale, ha lo stesso limite di quest’ultimo ovvero non è in grado di riportare la<br />
variabile controllata al valore di set-point in presenza di disturbi prolungati nel tempo. I controllori<br />
PD emettono infatti un segnale che è proporzionale, oltre che all’errore, alla sua derivata:<br />
dε<br />
p = ps<br />
+ K P ⋅ε<br />
+ K D ⋅<br />
dt<br />
La costante KD è chiamata guadagno derivativo. L’aggiunta dell’azione derivativa rende la risposta<br />
del sistema più rapida tuttavia, in presenza di rumore di fondo (noise) nel segnale proveniente dallo<br />
strumento di misura, tale azione tende ad amplificare il rumore a meno che il segnale stesso non sia<br />
filtrato.<br />
2.5 <strong>–</strong> Controllori ad azione proporzionale-integrale-derivativa (PID)<br />
Infine, i controllori del tipo PID sono caratterizzati da un segnale del tipo:<br />
t<br />
dε<br />
p = ps<br />
+ K P ⋅ε<br />
+ K I ⋅∫<br />
ε ⋅dt<br />
+ K D ⋅<br />
dt<br />
0<br />
Pertanto il segnale dipende sia dal valore attuale che dalla storia dell’errore ed anche da come<br />
questo evolverà nel futuro.<br />
L’espressione su scritta, chiamata forma ideale del segnale, in molti testi di teoria dei <strong>controlli</strong><br />
<strong>automatici</strong> viene sostituita dalla cosiddetta forma standard:<br />
t<br />
K P<br />
dε<br />
p = ps<br />
+ K P ⋅ε<br />
+ ⋅ ε ⋅dt<br />
+ K P ⋅τ<br />
D<br />
τ ∫<br />
I<br />
dt<br />
0<br />
Cioè il guadagno derivativo KD e quello integrale KI vengono espressi in funzione del guadagno<br />
proporzionale KP e di altri due parametri, chiamati rispettivamente tempo derivativo τD ed integrale<br />
τI:<br />
K D<br />
K P τ D=<br />
τ I=<br />
K P<br />
K I<br />
Il motivo di questa apparentemente inutile complicazione risiede nel fatto che in questo modo i<br />
parametri suddetti acquistano un significato fisico maggiormente comprensibile. Infatti,<br />
raggruppando a fattore comune, abbiamo:<br />
t<br />
⎛ ⎡<br />
⎞<br />
⎜ ⎛ dε<br />
⎞ 1 ⎤<br />
p = p<br />
⎟<br />
s + K P ⋅<br />
⎜ ⎢⎜ε<br />
+ τ D ⎟ + ⋅∫<br />
ε ⋅dt⎥<br />
⎟<br />
⎝ ⎣⎝<br />
dt ⎠ τ I 0 ⎦⎠<br />
In altri termini il segnale di un controllore PID è proporzionale al valore che l’errore avrà<br />
(approssimativamente) tra τD secondi nel futuro sommato al valore (medio) che l’errore stesso<br />
assumerebbe se l’azione di controllo riuscisse ad eliminarlo in τI secondi a partire dall’istante in cui<br />
si è manifestato nel passato.<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 6
2.6 <strong>–</strong> Confronto tra i diversi tipi di controllori<br />
A causa di un qualunque disturbo nelle variabili di input di un processo la variabile controllata<br />
subirà degli scostamenti dal suo valore di set-point. In presenza di un disturbo permanente, ossia nel<br />
caso in cui la variabile di input subisca un'alterazione stabile nel tempo, ed in assenza di sistemi di<br />
controllo, il valore della variabile controllata subirà una modifica che lo porterà ad un nuovo stato<br />
di regime.<br />
Con la presenza di un sistema di controllo invece, dopo qualche tempo inizierà un'azione di detto<br />
sistema che cercherà di mantenere la variabile controllata vicino al valore che essa aveva prima<br />
dell'azione di disturbo. Con un controllo puramente proporzionale il sistema e' in grado di arrestare<br />
la crescita o il decremento della variabile controllata ma non di riportare questa variabile al valore<br />
che essa aveva prima che intervenisse l'azione disturbatrice. L'azione del sistema quindi consiste nel<br />
far sì che il nuovo valore di regime della variabile controllata sia minore (in valore assoluto) di<br />
quello che essa assumerebbe senza controllo.<br />
La differenza tra questo nuovo valore di regime e il valore originario viene detta offset. L'aggiunta<br />
dell'azione integrale migliora notevolmente le cose in quanto elimina l'offset, cioè la variabile<br />
controllata riassumerà alla fine il valore originario, tuttavia il sistema acquista un carattere<br />
fortemente pendolatorio, cioè la variabile inizia ad oscillare intorno al valore di set-point fino ad<br />
assestarsi, dopo un periodo più o meno lungo, su tale valore. L'azione derivativa, sommata a quelle<br />
integrale e proporzionale, migliora in maniera definitiva il comportamento del sistema. La<br />
variazione nei valori della variabile controllata si arresta subito e questa ritorna al punto di set-point<br />
senza quasi nessuna oscillazione. La scelta tra i vari tipi di sistemi di controllo dipende dalle loro<br />
particolari applicazioni. Se un offset è in qualche misura tollerabile, il sistema proporzionale sarà da<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 7
preferire per il suo costo contenuto. Se d'altra <strong>parte</strong> non è ammissibile alcun offset sarà giocoforza<br />
inserire nel sistema l'azione integrale, a cui si dovrà aggiungere quella derivativa nell'eventualità di<br />
eliminare anche oscillazioni eccessive.<br />
L'aggiunta di ogni modalità di controllo significa una spesa maggiore ed una maggiore difficoltà di<br />
definizione dei parametri del controllore, cioè difficoltà nella scelta dei valori di banda<br />
proporzionale e dei tempi di intervento dell'azione integrale e derivativa più convenienti. E' questa<br />
un'operazione alquanto difficile per la quale esistono regole matematiche ma per lo più si procede<br />
per tentativi successivi.<br />
Per avere inoltre uniformità di segnali che permettano di sostituire ad un apparecchio di una ditta<br />
l'analogo di un'altra occorre adottare strumenti unificati. Nella catena pneumatica si usano<br />
trasmettitori che emettono segnali 3-25 PSI. I ricevitori, che possono essere controllori o semplici<br />
registratori, operano ricevendo detto segnale. A loro volta i controllori emettono un segnale di<br />
comando della valvola variabile da 3 a 15 PSI. Analogamente alla catena pneumatica opera la<br />
catena elettronica, il segnale in questo caso è 4-20 mA. Sia in campo pneumatico che in quello<br />
elettronico non si <strong>parte</strong> da 0 ma rispettivamente da 3 PSI e 4 mA, questo per eliminare l'inizio scala<br />
che ha sempre difficoltà di linearità.<br />
3 <strong>–</strong> Modulatore (controllore) pneumatico<br />
I controllori possono essere costruiti utilizzando diverse tecnologie. Esistono infatti controllori<br />
elettronici (analogici e digitali), meccanici, pneumatici, oleodinamici.<br />
Alla base di tutti gli strumenti pneumatici si utilizza il sistema lamina-ugello. Esso e' detto<br />
modulatore pneumatico e il suo schema di funzionamento e' rappresentato nella figura.<br />
A fronte di un ugello posto all'estremità' di un piccolo tubetto e' posta la lamina che e' collegata al<br />
sistema di misura. A monte dell'ugello e' posta una strozzatura che ha lo scopo di variare la perdita<br />
di carico al variare della portata di aria che percorre il tubetto. Questa portata e' a sua volta funzione<br />
della distanza della lamina dall'ugello, distanza che e' legata al segnale dello strumento di misura.<br />
Un tubetto posto a valle della strozzatura e a monte all'ugello invia il segnale modulato all'utilizzo,<br />
ossia all’organo di regolazione. Tutto il sistema e' alimentato con la pressione standard di 20 PSI<br />
(1.4bar).<br />
Quando la lamina e' molto lontana dall'ugello la portata di aria e' molto forte per cui la perdita di<br />
carico nelle strozzatura e' elevata.<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 8
Al segnale andrà una pressione bassa e cioè 3 PSI. Viceversa avviene quando la lamina si avvicina<br />
al tubetto; la portata diviene bassa, la perdita di carico nella strozzatura si riduce e il segnale in<br />
uscita aumenta a 15 PSI. Negli apparecchi in commercio la variazione totale da 3 a 15 PSI avviene<br />
con uno spostamento piccolissimo della lamina (circa 0.02 mm). E' questo un grosso vantaggio<br />
perché a piccoli movimenti meccanici si uniscono forti variazioni di segnale. Il sistema per<br />
funzionare necessita di aria pulita e secca per evitare il deposito di goccioline che possono turbare il<br />
segnale.<br />
Il sistema sopra descritto e' il principio base della strumentazione pneumatica. Esso però deve<br />
essere integrato da meccanismi più complessi per poter dare origine, ad esempio, a strumenti<br />
proporzionali. Dati i piccolissimi spostamenti richiesti, infatti, il sistema semplice come descritto<br />
funzionerebbe solo "tutto o niente". Per avere uno strumento affidabile è necessario innanzitutto<br />
linearizzare la risposta, ossia renderla proporzionale al segnale in entrata. Per questo motivo si cerca<br />
di correggerla utilizzando meccanismi come quello mostrato in figura.<br />
Supponiamo che vi sia uno spostamento della lamina dovuto al fatto che la misura non è quella<br />
desiderata e ipotizziamo che durante tale spostamento la lamina si avvicini all'ugello. L'azione tende<br />
ovviamente a far aumentare la pressione in uscita. Osservando la figura, vediamo che la pressione<br />
in uscita tende ad allontanare la lamina in quanto il soffietto si dilata comprimendo la molla. Il<br />
movimento del soffietto modera quindi l'azione che avrebbe avuto il solo sistema lamina-ugello.<br />
Risulta che il segnale in uscita e' il medesimo presente nel soffietto contrastato dalla molla. Essendo<br />
la deformazione della molla lineare, il tutto agisce nel senso di linearizzare il segnale di uscita al<br />
variare dello spostamento di un estremo della lamina.<br />
4 <strong>–</strong> Valvole di regolazione<br />
L'organo finale di regolazione è di solito costituito da una valvola. Nel tipo pneumatico l'organo che<br />
provoca il movimento è un motore costituito da una membrana di gomma alloggiata in un<br />
opportuno serbatoio di forma circolare e collegata ad uno stelo che a sua volta sposta l'otturatore<br />
della valvola. Il movimento dello stelo è contrastato da una molla antagonista. La forza che agisce<br />
sulla membrana è data dal prodotto della pressione dell'aria per la superficie della membrana stessa.<br />
Siccome la superficie della membrana è costante, la spinta è direttamente proporzionale alla<br />
pressione dell'aria, ed essendo la molla comprimibile in modo rigorosamente proporzionale,<br />
l'otturatore si sposta proporzionalmente alla pressione di comando dello strumento regolatore<br />
(controllore). Quando ad esempio la pressione di comando è di 3 PSI la valvola comincia a chiudere<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 9
o ad aprire; a 9 PSI la valvola ha fatto metà corsa, ed è chiusa o aperta definitivamente a 15 PSI. Le<br />
valvole possono infatti essere o "normalmente aperte", nel senso che senza aria sono aperte e che<br />
l'aumento del segnale dello strumento provvede a chiuderle, o "normalmente chiuse" quando la<br />
molla le chiude e la pressione di comando tende ad aprirle. La scelta del tipo di azione dipende dal<br />
processo da regolare. Una valvola che immette ad esempio acido cloridrico in un serbatoio di<br />
neutralizzazione è bene che sia normalmente chiusa, in modo che in assenza di aria per una<br />
eventuale rottura non si abbia travaso non regolato di acido nel serbatoio. La scelta del diametro di<br />
passaggio della valvola deve essere calcolata rigorosamente. Di solito detto diametro deve essere<br />
minore di quello della tubazione in modo da concentrare nella valvola il massimo di perdite di<br />
carico e con ciò la possibilità di regolazione. Bisogna anche porre attenzione affinché la forza della<br />
membrana sia sufficiente ad azionare la valvola quando si è in presenza di forti salti di pressione.<br />
Nel caso ciò non si verifichi si deve ricorrere a servomotori maggiorati.<br />
In una valvola di regolazione, la relazione esistente tra il grado di apertura (la luce della sezione di<br />
passaggio determinata dal movimento dell’otturatore) e la portata del fluido, viene chiamata<br />
caratteristica della valvola. In base alla loro caratteristica, le valvole di regolazione si distinguono<br />
in 4 tipi:<br />
1. valvole ad apertura rapida;<br />
2. valvole a caratteristica lineare;<br />
3. valvole a caratteristica quadratica;<br />
4. valvole a caratteristica esponenziale o equipercentuale.<br />
La caratteristica di una valvola è ottenuta attraverso misure sperimentali in laboratorio ed è fornita<br />
dal costruttore sotto forma di diagramma in cui, sull’asse delle ascisse, è riportato il grado di<br />
apertura come rapporto percentuale del grado di apertura massimo e, su quello delle ordinate, la<br />
portata come rapporto percentuale della portata massima. Avremo pertanto 4 tipi di curve<br />
corrispondenti ai 4 tipi di valvole suddette:<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 10
La curva caratteristica, di cui sopra, rappresenta la cosiddetta caratteristica intrinseca della valvola,<br />
ossia descrive il comportamento della valvola quando in essa si concentra tutta la perdita di carico<br />
del circuito idraulico in cui è inserita, ossia quando la sua autorità vale 1. L’autorità di una valvola,<br />
infatti, è il rapporto tra la perdita di carico nella valvola e quella totale nell’intero circuito.<br />
Quando ciò non si verifica (il che avviene quasi sempre), ossia quando l’autorità della valvola<br />
scende al di sotto dell’unità, la curva caratteristica si modifica nel senso che valvole aventi<br />
caratteristica intrinseca quadratica o esponenziale assumono una caratteristica installata lineare,<br />
mentre valvole a caratteristica intrinseca lineare si comportano come valvole ad apertura rapida.<br />
È evidente che una valvola di regolazione che deve essere inserita in un sistema di controllo deve<br />
possedere una caratteristica installata che si avvicina il più possibile alla linearità, perché questo<br />
consente il maggior grado di precisione nella regolazione della portata e quindi nell’efficienza del<br />
controllo stesso.<br />
Supponendo di aver effettuato una scelta di questo tipo (valvola di regolazione a caratteristica<br />
installata lineare), potremo scrivere per le diverse parti del circuito di controllo:<br />
▫ controllore: p p = ∆p<br />
= K ⋅ε<br />
− s<br />
P<br />
▫ attuatore: A − As<br />
= ∆A<br />
= K A ⋅ ∆p<br />
▫ valvola: Q − Qs<br />
= KV<br />
⋅ ∆A<br />
= ( KV<br />
⋅ K A ⋅ K P ) ⋅ε<br />
dove coi simboli p, A e Q si sono indicate, rispettivamente, il segnale in uscita dal controllore,<br />
l’apertura della valvola e la portata del fluido che la attraversa, mentre coi simboli, ps, As e Qs le<br />
stesse variabili quando il sistema è a regime, ovvero in assenza di disturbi.<br />
Le grandezze KP, KA e KV rappresentano invece il guadagno proporzionale del controllore, la<br />
costante elastica della molla dell’attuatore (quella che muove lo stelo della valvola e quindi<br />
l’otturatore della stessa) e la costante di proporzionalità tra apertura e portata della valvola lineare<br />
selezionata. Il prodotto di queste costanti, ovvero KV ⋅ K A ⋅ K P , viene di norma indicato con il<br />
simbolo Kc e rappresenta il guadagno proporzionale del sistema costituito dall’insieme controllore +<br />
attuatore + valvola.<br />
I <strong>controlli</strong> <strong>automatici</strong> <strong>–</strong> I a <strong>parte</strong> 11