Indice - Padis
Indice - Padis
Indice - Padis

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Indice</strong><br />
Introduzione vii<br />
1 Teoria dell’elasticità 1<br />
1.1 I materiali piezoelettrici . . . . . . . . . . . . . . . 2<br />
1.2 Il campo elasto-elettrico . . . . . . . . . . . . . . . 5<br />
1.2.1 Variabili meccaniche . . . . . . . . . . . . . 5<br />
1.2.2 Equazioni del moto . . . . . . . . . . . . . . 9<br />
1.2.3 Variabili elettriche . . . . . . . . . . . . . . 10<br />
1.2.4 Condizioni al contorno . . . . . . . . . . . . 12<br />
1.3 Legge di Hooke . . . . . . . . . . . . . . . . . . . . 14<br />
1.4 Equazioni costitutive di campo . . . . . . . . . . . 18<br />
1.5 Numero di costanti indipendenti nei sistemi cristal-<br />
lografici . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
2 Onde in mezzi elastici 24<br />
2.1 Equazione d’onda . . . . . . . . . . . . . . . . . . . 25<br />
2.1.1 Propagazione nei solidi . . . . . . . . . . . . 25<br />
2.1.2 Propagazione nei materiali piezoelettrici . . 28<br />
2.1.3 Propagazione nei fluidi . . . . . . . . . . . . 30
INDICE ii<br />
2.1.4 Attenuazione . . . . . . . . . . . . . . . . . 33<br />
3 Oscillazioni non lineari 37<br />
3.1 Oscillatore unidimensionale di Duffing . . . . . . . 38<br />
3.2 Risonanze armoniche e subarmoniche . . . . . . . . 46<br />
3.3 Onde in mezzi elastici non lineari . . . . . . . . . . 49<br />
3.4 Modello analitico per la generazione di armoniche<br />
frazionali . . . . . . . . . . . . . . . . . . . . . . . . 51<br />
3.4.1 Equazione di Mathieu . . . . . . . . . . . . 52<br />
3.4.2 Soglia della fondamentale per la generazione<br />
della subarmonica di ordine 1/2 . . . . . . . 59<br />
4 Risultati Sperimentali 64<br />
4.1 Strumentazione . . . . . . . . . . . . . . . . . . . . 64<br />
4.1.1 Descrizione della strumentazione . . . . . . 64<br />
4.2 Risultati sperimentali e confronto con i risultati<br />
teorici . . . . . . . . . . . . . . . . . . . . . . . . . 77<br />
4.2.1 I campioni piezoelettrici . . . . . . . . . . . 77<br />
4.2.2 Misure sperimentali relative al cilindro . . . 78<br />
4.2.3 Misure sperimentali relative alla piastrina . 94<br />
5 CONCLUSIONI e SVILUPPI FUTURI 104
Elenco delle figure<br />
1.1 Deformazioni in un elemento piezoelettrico. . . . . . 5<br />
1.2 Deformazione di un solido. . . . . . . . . . . . . . . 6<br />
1.3 Equilibrio meccanico di un volume interno ad un<br />
solido. . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
1.4 Curva tensione-deformazione del PZT-8 ([6]). . . . 17<br />
2.1 Vettori spostamento dell’onda quasi-longitudinale (A (1) )<br />
e delle onde quasi-trasversali (A (2) , A (3) ) nel caso<br />
di mezzo anisotropo. . . . . . . . . . . . . . . . . . 28<br />
2.2 Sistema di coordinate cilindriche associate al tubo<br />
piezoelettrico di raggio interno a, raggio esterno b<br />
ed altezza l. . . . . . . . . . . . . . . . . . . . . . . 36<br />
3.1 Oscillatore di Duffing. . . . . . . . . . . . . . . . . 39<br />
3.2 Risposta in frequenza dell’oscillatore di Duffing pri-<br />
vo di smorzamento. (a) Caso di molla dura. (b)<br />
Caso di molla soffice. . . . . . . . . . . . . . . . . . 43<br />
3.3 Risposta in frequenza dell’oscillatore di Duffing smorza-<br />
to. . . . . . . . . . . . . . . . . . . . . . . . . . . . 45<br />
4.1 Circuito equivalente di un elemento piezoelettrico. . 65
ELENCO DELLE FIGURE iv<br />
4.2 Schema a blocchi rappresentante la strumentazione<br />
impiegata nella misura dello spostamento radiale<br />
dei punti della superficie esterna dei provini. . . . . 70<br />
4.3 Interferometro acusto-ottico. . . . . . . . . . . . . . 73<br />
4.4 Tubi piezoelettrici. . . . . . . . . . . . . . . . . . . 77<br />
4.5 Impedenza del cilindro. . . . . . . . . . . . . . . . . 79<br />
4.6 Spostamenti relativi tra raggio laser e tubo piezoelet-<br />
trico. . . . . . . . . . . . . . . . . . . . . . . . . . . 82<br />
4.7 Spettro in frequenza del segnale rilevato (Cilindro,<br />
6 V, 16.9 kHz). . . . . . . . . . . . . . . . . . . . . 83<br />
4.8 Spettro in frequenza del segnale rilevato (Cilindro,<br />
14.5 V, 16.9 kHz). . . . . . . . . . . . . . . . . . . 83<br />
4.9 Livello di soglia [V] rispetto alla frequenza [kHz] del<br />
segnale di pilotaggio (Cilindro). . . . . . . . . . . . 85<br />
4.10 Livello di soglia [V] rispetto alla frequenza [kHz] del<br />
segnale di pilottagio (dettaglio del Cilindro). . . . . 85<br />
4.11 Andamento della soglia al variare della frequenza di<br />
pilotaggio per diversi punti lungo l’asse del cilindro. 86<br />
4.12 Andamento dell’ampiezza della fondamentale e delle<br />
subarmoniche rispetto all’ampiezza di pilotaggio (Cilin-<br />
dro). . . . . . . . . . . . . . . . . . . . . . . . . . . 87<br />
4.13 Andamento dell’ampiezza della fondamentale e delle<br />
subarmoniche lungo l’asse del cilindro. . . . . . . . 89
ELENCO DELLE FIGURE v<br />
4.14 Andamento dell’ampiezza della fondamentale e del-<br />
l’armonica di ordine 1/2 lungo l’asse del cilindro<br />
rispetto al livello di soglia (sotto soglia). . . . . . . 91<br />
4.15 Andamento dell’ampiezza della fondamentale e del-<br />
l’armonica di ordine 1/2 lungo l’asse del cilindro<br />
rispetto al livello di soglia (sopra soglia). . . . . . . 92<br />
4.16 Spettri in frequenza al variare della posizione di<br />
rilevazione del segnale (Cilindro). . . . . . . . . . . 92<br />
4.17 Spettri in frequenza al variare dell’ampiezza di pi-<br />
lotaggio di rilevazione del segnale (Cilindro). . . . . 93<br />
4.18 Impedenza della piastrina. . . . . . . . . . . . . . . 95<br />
4.19 Spettro in frequenza del segnale rilevato (Piastrina,<br />
5,8 V, 12.9 kHz). . . . . . . . . . . . . . . . . . . . 96<br />
4.20 Spettro in frequenza del segnale rilevato (Piastrina,<br />
53,4 V, 12.9 kHz). . . . . . . . . . . . . . . . . . . 96<br />
4.21 Livello di soglia [V] rispetto alla frequenza [kHz] del<br />
segnale di pilottagio (Piastrina). . . . . . . . . . . . 98<br />
4.22 Andamento della soglia al variare della frequenza di<br />
pilotaggio in corrispondenza del centro della piastrina. 98<br />
4.23 Andamento dell’ampiezza della fondamentale e delle<br />
subarmoniche rispetto all’ampiezza di pilotaggio (Pi-<br />
astrina). . . . . . . . . . . . . . . . . . . . . . . . . 99<br />
4.24 Andamento dell’ampiezza della fondamentale e delle<br />
subarmoniche rispetto alla posizione lungo l’asse mag-<br />
giore della piastrina. . . . . . . . . . . . . . . . . . 100
ELENCO DELLE FIGURE vi<br />
4.25 Spettri in frequenza al variare della posizione di<br />
rilevazione del segnale (Piastrina). . . . . . . . . . 102<br />
4.26 Spettri in frequenza al variare dell’ampiezza di pi-<br />
lotaggio di rilevazione del segnale (Piastrina). . . . 103<br />
5.1 Spazio delle Fasi sotto soglia. . . . . . . . . . . . . . 107<br />
5.2 Spazio delle Fasi all’avvicinarsi della soglia. . . . . 107<br />
5.3 Spazio delle Fasi sopra soglia. . . . . . . . . . . . . 108
INTRODUZIONE<br />
Le vibrazioni non lineari in un mezzo limitato, alla frequen-<br />
za corrispondente ai suoi modi propri, costituiscono un fenomeno<br />
complesso di interesse sia per chi studia le caratteristiche dei ma-<br />
teriali, sia per gli ingegneri meccanici o per i progettisti di dis-<br />
positivi elettronici, per lo scopo comune di valutare la risposta in<br />
dispositivi non lineari e di evitare effetti indesiderati nei sistemi<br />
che devono mantenere caratteristiche di linearità.<br />
La generazione di subarmoniche è l’effetto più sottile dell’an-<br />
armonicità, essendo un processo di soglia con elementi di impreve-<br />
dibilità legato allo stabilirsi di comportamento caotico in sistemi<br />
meccanici ed elettronici.<br />
Un semplice oscillatore non lineare monodimensionale eccita-<br />
to armonicamente alla sua frequenza fondamentale presenta nella<br />
risposta uno spettro in frequenza contenente una sequenza di sub-<br />
armoniche e ultrarmoniche: se il sistema è smorzato, le frequenze<br />
subarmoniche vengono generate quando l’ampiezza di oscillazione<br />
alla frequenza fondamentale supera un livello di soglia.
Inoltre, nei risonatori macroscopici la nonlinearità causa ac-<br />
coppiamento tra modi normali, e in tal modo si stabilisce un<br />
flusso netto di energia tra il modo alla frequenza fondamentale<br />
e oscillazioni a frequenze superiori e inferiori.<br />
In questa tesi è stato affrontato uno studio teorico e sperimen-<br />
tale della risposta di ceramiche piezoelettriche eccitate in regime<br />
di vibrazione non lineare. La geometria dei trasduttori esaminati<br />
è di due categorie: cilindrica circolare cava (tubi) e a lastra sot-<br />
tile (piastrina); il materiale di cui essi sono composti è ceramica<br />
piezoelettrica Navy type III, noto anche come PZT-8.<br />
Eccitando i campioni con una tensione sinusoidale a una fre-<br />
quenza pari a quella di un modo proprio, sono state effettuate<br />
misure del campo degli spostamenti superficiali. In regime non<br />
lineare, è stata messa in evidenza la presenza di una componente<br />
fondamentale di vibrazione e di armoniche superiori e, in partico-<br />
lare, inferiore. Inoltre è stato mostrato come all’aumentare della<br />
ampiezza di eccitazione si presenti uno spettro in frequenza quasi<br />
continuo, indice di una vibrazione di tipo caotico.<br />
Schema della Tesi<br />
La prima parte della presente tesi riporta alcuni elementi di<br />
teoria che sono stati utilizzati per l’elaborazione dei risultati spe-<br />
rimentali.<br />
Il primo capitolo presenta la teoria dell’elasticità sviluppata per
ELENCO DELLE FIGURE ix<br />
i materiali piezoelettrici: in esso sono ricavate le equazioni costi-<br />
tutive che governano il comportamento elastico di tali materiali.<br />
Nel secondo capitolo è affrontato, inizialmente, lo studio della<br />
propagazione ondosa libera in mezzi elastici, introducendo, suc-<br />
cessivamente, l’equazione d’onda per i solidi e per i fluidi.<br />
Nel terzo capitolo si introducono alcuni concetti sulle oscil-<br />
lazioni non lineari: riferendosi all’oscillatore di Duffing, viene data<br />
una giustificazione analitica della nascita di armoniche e subar-<br />
moniche in condizioni non lineari. Inoltre, dopo un’introduzione<br />
all’equazione di Mathieu, viene sviluppato un modello analitico<br />
che descrive il fenomeno della generazione delle armoniche frazion-<br />
ali, proprio basato sull’equazione di Mathieu.<br />
Nel quarto capitolo sono illustrati la catena di misura utilizzata<br />
nelle misure sperimentali e sono descritti i risultati sperimentali<br />
ottenuti nello studio delle vibrazioni non lineari in cui si verifica<br />
l’insorgenza di armoniche frazionali.<br />
Questi risultati sperimentali, che ottengono riscontro nel mo-<br />
dello analitico sviluppato, hanno consentito di dimostrare come il<br />
fenomeno della generazione delle armoniche frazionali sia a carat-<br />
tere ”locale”. Conseguenza della ”localizzazione” del fenomeno è<br />
anche l’indipendenza del processo e delle condizioni sotto cui si<br />
generano le armoniche frazionali dalla geometria dei campioni.
Capitolo 1<br />
Teoria dell’elasticità<br />
In questo capitolo sono presentati i principali risultati della<br />
teoria dell’elasticità, alcuni validi per un qualsiasi corpo continuo<br />
ed omogeneo, altri rivolti in particolare alla caratterizzazione dei<br />
materiali piezoelettrici, dei quali sono date alcune informazioni<br />
preliminari al paragrafo 1.1.<br />
In generale, la deformazione di un corpo è dovuta all’azione di<br />
forze esterne: se tali forze variano nel tempo, una perturbazione<br />
elastica si propaga nel materiale. L’aspetto della propagazione è<br />
affrontato con maggior dettaglio nel successivo capitolo. Di segui-<br />
to invece, si introducono nel paragrafo 1.2.1 le variabili meccaniche<br />
tensione e deformazione descritte dai relativi tensori; al paragrafo<br />
successivo si prendono in esame le condizioni per l’equilibrio di un<br />
volume solido interno al corpo per scrivere l’equazione del moto.<br />
Inoltre, per materiali piezoelettrici, è necessario tener conto<br />
delle variabili elettriche del campo: risulta lecita l’assunzione di<br />
approssimazione quasi-statica del campo elettromagnetico, di cui<br />
al paragrafo 1.2.3. Il problema assume la fisionomia della propaga-
1.1 I materiali piezoelettrici 2<br />
zione di una perturbazione elasto-elettrica, con l’interazione di<br />
grandezze meccaniche ed elettriche.<br />
Le equazioni costitutive sono presentate al paragrafo 1.3, in<br />
cui si ricava il legame tensione-deformazione (legge di Hooke),<br />
e al paragrafo 1.4, dove si specializza la trattazione ai materiali<br />
piezoelettrici. I legami tra le variabili di campo sono forniti da<br />
tensori che comprendono, nel caso più complesso, 41 costanti signi-<br />
ficative 1 . La simmetria dei cristalli interviene poi nella riduzione<br />
del numero di costanti indipendenti (par. 1.5).<br />
È opportuno sottolineare che le costanti elastiche qui considera-<br />
te assumono il valore relativo ad un processo adiabatico. Quando<br />
un corpo viene posto in vibrazione, a causa di effetti dissipativi in-<br />
terni, esso presenta una temperatura dipendente dal tempo e dallo<br />
spazio. Tuttavia, il trasferimento di calore per conduzione avviene<br />
con tempi molto più lunghi dei periodi di oscillazione in genere<br />
considerati, per cui diviene accettabile l’ipotesi di trasformazione<br />
adiabatica, riferendo a questa i valori delle costanti elastiche.<br />
1.1 I materiali piezoelettrici<br />
Il termine piezoelettricità indica la proprietà di alcuni cristalli<br />
di manifestare una polarizzazione elettrica se sollecitati da una<br />
deformazione meccanica, circostanza a cui si dà il nome di effetto<br />
piezoelettrico diretto. Viceversa, per effetto piezoelettrico inver-<br />
so si intende la situazione reciproca, in cui l’applicazione di una<br />
1 Si suddividono in 21 elastiche, 18 piezoelettrche, 6 dielettriche.
1.1 I materiali piezoelettrici 3<br />
polarizzazione elettrica è in grado di indurre nel materiale una<br />
deformazione meccanica. La totale invertibilità dei due effetti fa<br />
inserire la piezoelettricità tra i fenomeni fisici di tipo reversibile.<br />
Caratteristiche piezoelettriche si riscontrano in natura nei cri-<br />
stalli privi di un centro di simmetria (quarzo, sale di Rochelle). In<br />
realtà, l’effetto è stato evidenziato anche in cristalli monoatomi-<br />
ci come il tellurio (Te) ed il selenio (Se): in questi casi la po-<br />
larizzazione elettrica prodotta dalla deformazione è attribuita ad<br />
un cambiamento nella distribuzione della nube elettronica degli<br />
atomi.<br />
Attualmente i materiali più utilizzati nelle applicazioni sono<br />
di tipo artificiale: si tratta di ceramiche policristalline tra cui il<br />
titanato di bario (BaTiO3), il titanato di piombo (PbTiO3), lo<br />
zirconato di piombo (PbZrO3) e composti zirconio/titanio (cir-<br />
ca in rapporto di 53/47), le ultime tre comunemente indicate<br />
nella nomenclatura industriale con la sigla PZT (Piezoelectric<br />
lead Zirconium Titanate ceramics); specifici additivi possono in-<br />
oltre essere aggiunti per dare a ciascuna composizione le proprietà<br />
fisico-chimiche desiderate.<br />
Il processo tecnologico di fabbricazione delle ceramiche piezoe-<br />
lettriche prevede una prima lavorazione per sinterizzazione 2 : si<br />
giunge ad un solido composto da una moltitudine di domini fer-<br />
roelettrici orientati in modo casuale e conseguentemente incapaci<br />
2 Si tratta di un procedimento per cui da un miscuglio di polveri cristalline, si passa ad<br />
un solido di forma opportuna (barre, piastre, anelli, dischi, cilindri cavi, etc.) attraverso la<br />
compressione ed il riscaldamento in forno delle polveri.
1.1 I materiali piezoelettrici 4<br />
di infondere nel materiale proprietà piezoelettriche. Dopo aver<br />
disposto sulla superficie del solido elettrodi di argento per fusione<br />
o elettrodi di nickel per deposizione chimica, ad esempio, si passa<br />
all’applicazione di un elevato campo elettrico (pooling process),<br />
tipicamente 200 V/m a temperature di 100 ◦ C, che causa l’allinea-<br />
mento dei domini rendendo piezoelettrica la ceramica. La piezoe-<br />
lettricità, anche detta elettrostrizione nel caso delle ceramiche,<br />
permane all’annullarsi del campo elettrico ed a temperatura am-<br />
biente, ma viene perduta al di sopra della temperatura di Curie,<br />
generalmente tra i 200 e i 400 ◦ C, in relazione alla ceramica.<br />
La direzione di polarizzazione definisce, per convenzione, l’asse<br />
z di un sistema di coordinate ortogonali. Si è soliti utilizzare una<br />
notazione degli assi che sostituisce alle lettere x, y e z i numeri 1,<br />
2 e 3, utilizzando il 4, 5 e 6 per indicare le distorsioni intorno agli<br />
assi 1, 2 e 3 rispettivamente.<br />
Facendo riferimento all’effetto inverso, in figura 1.1 sono illu-<br />
strate le tipologie di deformazione che possono avvenire in un<br />
elemento piezoelettrico. Il caso (a) si riferisce ad un campione<br />
il cui asse di polarizzazione è parallelo alla direzione di un cam-<br />
po elettrico. Un campo applicato della stessa polarità del campo<br />
di polarizzazione causa elongazione lungo l’asse 3 e contrazione<br />
in tutte le direzioni perpendicolari. Un campo inverso provoca<br />
contrazione secondo l’asse 3 ed espansione nelle direzioni trasver-<br />
sali. Il caso (b) mostra invece la condizione con asse di polariz-<br />
zazione perpendicolare al campo elettrico. Le deformazioni che ne
1.2 Il campo elasto-elettrico 5<br />
3<br />
(+)<br />
Elettrodi<br />
(−)<br />
(−)<br />
(a) (b)<br />
(+)<br />
Figura 1.1: Deformazioni in un elemento piezoelettrico.<br />
scaturiscono sono di taglio e possono realizzarsi solo se l’elemento<br />
è vincolato rigidamente 3 .<br />
1.2 Il campo elasto-elettrico<br />
1.2.1 Variabili meccaniche<br />
Deformazioni<br />
La figura 1.2 mostra due punti M ed N appartenenti ad un<br />
corpo elastico sottoposto a deformazione ed individuati nel sis-<br />
tema di riferimento cartesiano Ox1x2x3 dai vettori posizione xM<br />
e xN. L’elemento infinitesimo di lunghezza dx sia soggetto ad<br />
una deformazione tale da trasferire M ed N in M ′ ed N ′ attraver-<br />
so gli spostamenti uM ed uN. Indicati i nuovi vettori posizione<br />
con x ′ M e x′ N , risultano definite le seguenti componenti del vettore<br />
3 Diversamente si avrebbe una violazione del principio di conservazione del momento della<br />
quantità di moto.<br />
3
1.2 Il campo elasto-elettrico 6<br />
x1<br />
spostamento:<br />
x3<br />
xN<br />
N<br />
dx<br />
M<br />
xM x ′ N<br />
x ′ M<br />
uM<br />
x2<br />
M ′<br />
uN<br />
dx ′<br />
Figura 1.2: Deformazione di un solido.<br />
uM,i(xj, t) = x ′ M,j(t) − xM,j<br />
N ′<br />
(1.1a)<br />
uN,i(xj + dxj, t) = uN,i(xj, t) + ∂uN,i<br />
dxj , (1.1b)<br />
∂xj<br />
nelle quali la variabile temporale t tiene conto del movimento lo-<br />
cale intorno la posizione di equilibrio di ciascun punto e gli indici<br />
i e j assumono i valori 1, 2 e 3. Il tensore del secondo ordine<br />
∂uN,i/∂xj che compare nella equazione (1.1b) prende il nome di<br />
gradiente di spostamento 4 ; il corpo subirà deformazione solo nel<br />
caso in cui il gradiente sia diverso da zero.<br />
In questa forma, tuttavia, il tensore non è adatto a descrivere<br />
deformazioni, in quanto risulterebbe non nullo anche in corrispon-<br />
denza di una rotazione rigida. Il problema può essere risolto de-<br />
componendo ∂ui/∂xj [1] in una parte antisimmetrica Ωij e in una<br />
4 Nelle relazioni successive si ometterà l’indicazione del pedice N.
1.2 Il campo elasto-elettrico 7<br />
simmetrica Sij<br />
Ωij(xj, t) = 1<br />
<br />
∂ui<br />
−<br />
2 ∂xj<br />
∂uj<br />
<br />
∂xi<br />
(1.2)<br />
Sij(xj, t) = 1<br />
<br />
∂ui<br />
+<br />
2 ∂xj<br />
∂uj<br />
<br />
.<br />
∂xi<br />
(1.3)<br />
Lo spostamento descritto dalla (1.1b) diventa:<br />
ui(xj + dxj, t) = ui(xj, t) + Sijdxj + Ωijdxj , (1.4)<br />
in cui i termini del secondo membro tengono conto rispettivamente<br />
di una traslazione, di una deformazione, di una rotazione locale<br />
del corpo.<br />
Nella successiva scrittura delle equazioni di campo (1.35) e<br />
(1.38) il tensore Ωij non sarà considerato: esso, infatti, porterebbe<br />
ad avere un termine inerziale trascurabile rispetto agli altri e quin-<br />
di non fondamentale per lo studio della propagazione delle onde<br />
elastiche.<br />
Indicato con dV un volume infinitesimo del corpo, si definisce<br />
dilatazione il rapporto S = (dV ′ −dV )/dV , che risulta esprimibile<br />
come:<br />
S = div u = ∂ui<br />
∂xi<br />
= Sii , (1.5)<br />
cioè, la variazione di volume S è uguale alla traccia Sii del tensore<br />
di deformazione.<br />
I termini Sij, con i = j, si riferiscono, invece, a spostamenti<br />
duj perpendicolari all’elemento dxi e corrispondono ad una defor-<br />
mazione di taglio responsabile della variazione dell’angolo tra due<br />
elementi infinitesimi inizialmente perpendicolari.
1.2 Il campo elasto-elettrico 8<br />
x1<br />
x3<br />
fdV<br />
Figura 1.3: Equilibrio meccanico di un volume interno ad un solido.<br />
Tensioni<br />
n<br />
ds<br />
La deformazione di un solido è dovuta all’azione di forze es-<br />
terne: queste possono essere forze superficiali di contatto o forze<br />
di volume (gravitazionali, elettromagnetiche, etc.). L’equilibrio<br />
meccanico sarà garantito solo se nel corpo nascono forze interne<br />
di reazione.<br />
Considerato un elemento di superficie arbitrario, interno al soli-<br />
do e di area ds su cui agisce una forza dF (Figura 1.3), si definisce<br />
il vettore tensione meccanica T come forza per unità di area<br />
dF /ds; la sua intensità e direzione dipendono dall’orientamen-<br />
to dell’elemento ds, per cui introdotto il versore n = (n1, n2, n3)<br />
normale a ds si può scrivere:<br />
T (n) = lim<br />
ds→0<br />
x2<br />
<br />
dF<br />
ds<br />
s<br />
dV<br />
V<br />
pds<br />
. (1.6)<br />
Si prenda in esame un volume V interno al solido; siano pi ed fi<br />
le componenti delle forze di superficie e di volume. La risultante
1.2 Il campo elasto-elettrico 9<br />
F delle forze applicate al volume V è la somma della tensione<br />
T (n) sulla superficie s, che racchiude V , e delle forze di volume<br />
agenti all’interno di V :<br />
<br />
Fi =<br />
s<br />
<br />
Ti(n)ds +<br />
V<br />
fidV = 0 . (1.7)<br />
L’applicazione del teorema della divergenza consente di scrivere:<br />
<br />
V<br />
<br />
fidV = −<br />
V<br />
<br />
∂Tik<br />
dV = − Tiknkds<br />
∂xk<br />
s<br />
(1.8)<br />
e sostituendo nella (1.7) si ottiene:<br />
Ti(n) = Tiknk . (1.9)<br />
Quest’ultima esprime la tensione meccanica attraverso le nove<br />
componenti Tik appartenenti al tensore delle tensioni di rango<br />
due ed espresse in [N/m 2 ].<br />
1.2.2 Equazioni del moto<br />
La conoscenza del tensore delle tensioni consente di scrivere le<br />
equazioni di equilibrio dinamico per un volume interno al solido.<br />
Sostituendo l’integrale di superficie della (1.7) con l’integrale<br />
di volume fornito dall’ultima uguaglianza della (1.8), la risultante<br />
delle forze agenti sul volume V diventa:<br />
<br />
Fi =<br />
V<br />
<br />
∂Tik<br />
∂xk<br />
<br />
+ fi dV = 0 . (1.10)<br />
L’applicazione della seconda equazione della dinamica porta quin-<br />
di alla:<br />
∂Tik<br />
∂xk<br />
+ fi = ρ ∂2ui , (1.11)<br />
∂t2
1.2 Il campo elasto-elettrico 10<br />
la quale va sotto il nome di equazione elastodinamica del moto per<br />
un mezzo solido continuo.<br />
Si prenda ora in considerazione un piccolo volume dV soggetto<br />
ad una rotazione θk intorno all’asse coordinato Oxk. L’equazione<br />
di equilibrio alla rotazione [1] si riduce 5 alla<br />
Tji − Tij + Gk = 0 , (1.12)<br />
avendo indicato con Gk il momento delle forze esterne per unità<br />
di volume.<br />
Nel caso in cui Gk sia nullo, la (1.12) fornisce la relazione<br />
Tji = Tij , (1.13)<br />
che esprime la simmetria del tensore delle tensioni, le cui compo-<br />
nenti indipendenti si riducono quindi a sei.<br />
A rigore, per lo studio dei cristalli polari sottoposti ad un cam-<br />
po elettrico sarebbero necessarie tutte le componenti del tensore;<br />
tuttavia, la torsione è piccola rispetto alle deformazioni prodotte<br />
dalle tensioni normali e di taglio e, nella pratica, la simmetria del<br />
tensore è assunta anche quando non direttamente verificata.<br />
1.2.3 Variabili elettriche<br />
Nei paragrafi precedenti, lo stato meccanico del solido è sta-<br />
to descritto mediante i tensori di deformazione e delle tensioni:<br />
queste quantità variabili nel tempo e nello spazio costituiscono il<br />
campo elastico.<br />
5 Nella semplificazione si considera che il momento di inerzia Ik → 0 per dV → 0.
1.2 Il campo elasto-elettrico 11<br />
Nei materiali piezoelettrici l’interdipendenza delle variabili mec-<br />
caniche ed elettriche implica accoppiamento tra le onde elastiche<br />
ed elettromagnetiche. Contributi dovuti al campo elettrico inter-<br />
vengono nelle equazioni dinamiche e termini relativi alla defor-<br />
mazione vanno considerati nelle equazioni elettromagnetiche.<br />
Teoricamente la distribuzione del campo può essere trovata<br />
solo risolvendo simultaneamente le equazioni dinamiche e quelle<br />
di Maxwell, ottenendo soluzioni rappresentate da onde ”elasto-<br />
elettromagnetiche”: in particolare, tre onde elastiche accompa-<br />
gnate da un campo elettrico e due elettromagnetiche seguite da<br />
una deformazione meccanica.<br />
Il problema può essere semplificato, essendo la velocità delle<br />
onde elastiche molto minore della velocità delle onde elettromagne-<br />
tiche 6 : questo va imputato al fatto che il campo elastico coinvolge<br />
spostamento di materia, con un trasferimento di deformazioni e<br />
tensioni da un punto ad un altro molto lento rispetto alla velocità<br />
di propagazione del campo elettrico. Di conseguenza, i campi elet-<br />
trico e magnetico associati alle vibrazioni meccaniche, propagan-<br />
tisi con la velocità della perturbazione elastica diventano trascur-<br />
abili. Diventa lecita l’approssimazione di considerare il campo<br />
elettromagnetico associato al campo elastico, di tipo quasi-statico<br />
e, le equazioni di Maxwell forniscono<br />
∇ × E = − ∂B<br />
∂t<br />
0 , (1.14)<br />
in cui B è il campo magnetico ed E è il campo elettrico derivabile,<br />
6 c = (10 4 ÷ 10 5 )V , c: velocità onde elettromagnetiche, V : velocità onde elastiche.
1.2 Il campo elasto-elettrico 12<br />
come in elettrostatica, dal potenziale scalare Φ secondo la<br />
Ei = − ∂Φ<br />
. (1.15)<br />
∂xi<br />
L’energia magnetica prodotta dalla deformazione è trascura-<br />
bile se paragonata alla quotaparte elettrica, così come, nel caso<br />
dell’onda elettromagnetica, l’energia elastica lo è rispetto a quella<br />
elettromagnetica.<br />
Da tali considerazioni ne deriva che l’interazione tra le tre onde<br />
elastiche e le due elettromagnetiche è debole e, conseguentemente,<br />
i fenomeni di propagazione ad esse associati possono essere trattati<br />
separatamente.<br />
Insieme al campo elettrico, l’altra variabile necessaria alla de-<br />
scrizione dei solidi piezoelettrici è il vettore spostamento elettrico<br />
D; esso segue l’equazione di Poisson<br />
∂Dj<br />
∂xj<br />
dove ρe è la densità volumica di cariche.<br />
= ρe , (1.16)<br />
Per materiali conduttori, infine, dovrà essere verificata l’equazio-<br />
ne di conservazione della carica<br />
∂Ji<br />
∂xi<br />
+ ∂ρe<br />
∂t<br />
= 0 , (1.17)<br />
avendo indicato con Ji la densità di corrente di conduzione per<br />
unità di area.<br />
1.2.4 Condizioni al contorno<br />
Quando siano riferite ad un mezzo di dimensioni finite, le solu-<br />
zioni delle precedenti equazioni devono soddisfare opportune con-
1.2 Il campo elasto-elettrico 13<br />
dizioni al contorno tra il materiale in esame e quello ad esso<br />
adiacente.<br />
Se i due materiali sono solidi rigidamente a contatto, lo sposta-<br />
mento deve essere continuo in tutti i punti del contorno di sepa-<br />
razione, per cui<br />
u (1)<br />
i<br />
= u(2)<br />
i , (1.18)<br />
dove l’apice (2) è riferito al materiale in contatto con la superficie<br />
del mezzo piezoelettrico (1). Per il caso particolare di contatto<br />
solido-fluido, la precedente condizione si applica alla sola compo-<br />
nente normale dello spostamento, in quanto il fluido è libero di<br />
muoversi in direzioni parallele alla superficie.<br />
Scrivendo l’equilibrio per ogni punto della superficie del solido<br />
[1], si giunge inoltre all’espressione<br />
T (1)<br />
i<br />
− T (2)<br />
i = pi . (1.19)<br />
Essendo pi la forza esterna di superficie per unità di area; in as-<br />
senza di quest’ultima, la tensione Ti è continua. Se il mezzo (2) si<br />
riduce al vuoto, allora<br />
T (1)<br />
i<br />
(1)<br />
= T ij nj = 0 , (1.20)<br />
cioè la tensione meccanica è nulla in corrispondenza di superficie<br />
libera.<br />
Le condizioni elettriche, in virtù dell’approssimazione quasi-<br />
statica (paragrafo 1.2.3), sono quelle che si riferiscono al campo<br />
elettrostatico. Sulla superficie di separazione tra i due mezzi, si ha
1.3 Legge di Hooke 14<br />
conservazione della componente tangenziale del campo elettrico e<br />
del potenziale scalare:<br />
E (2)<br />
t = E (1)<br />
t<br />
(1.21)<br />
Φ (2) = Φ (1) . (1.22)<br />
La componente normale dello spostamento elettrico rispetta la<br />
condizione<br />
con σ densità superficiale di carica libera.<br />
D (2)<br />
n − D (1)<br />
n = σ , (1.23)<br />
Infine, la densità di corrente di conduzione richiede che:<br />
1.3 Legge di Hooke<br />
J (1)<br />
n − J (2)<br />
n = dσ<br />
. (1.24)<br />
dt<br />
Al paragrafo 1.2.1 si è visto come l’equilibrio meccanico di un<br />
solido soggetto a deformazione sia garantito dalla nascita di ten-<br />
sioni interne di reazione; è intuibile l’esistenza di una relazione che<br />
leghi tensione e deformazione.<br />
In generale, si può distinguere tra materiali duttili e materiali<br />
fragili; i primi, al nascere della sollecitazione, sono caratterizzati<br />
da un legame tensione-deformazione di tipo lineare (campo elas-<br />
tico), quindi con andamento discostantesi dalla linearità all’au-<br />
mentare del carico (campo plastico), per poi giungere al collasso<br />
in corrispondenza della tensione di rottura; i secondi, invece, pre-<br />
sentano il solo campo elastico e il superamento di tale limite li<br />
porta direttamente a rottura.
1.3 Legge di Hooke 15<br />
In campo elastico, al cessare della sollecitazione si ha un re-<br />
cupero totale della deformazione. Raggiunto il campo plasti-<br />
co, la deformazione elastica è ancora recuperata all’annullarsi del<br />
carico, ma sarà presente anche una quotaparte di deformazione<br />
permanente.<br />
Si consideri un materiale elastico e si sviluppi in serie di Taylor<br />
intorno al valore Skl = 0 il tensore delle tensioni:<br />
Tij(Skl) = Tij(0) + ∂Tij<br />
<br />
<br />
Skl<br />
∂Skl<br />
+<br />
Skl=0<br />
+ 1 ∂<br />
2<br />
2 <br />
Tij <br />
SklSmn + . . . ; (1.25)<br />
∂Skl∂Smn<br />
<br />
Skl=0,Smn=0<br />
nell’ipotesi di piccole deformazioni, quando cioè il gradiente di<br />
spostamento assume valori di 10 −4 o 10 −3 , tale sviluppo può essere<br />
arrestato al primo ordine ed essendo Tij(0) = 0 si ottiene<br />
in cui<br />
Tij = cijklSkl , (1.26)<br />
<br />
<br />
<br />
cijkl = ∂Tij<br />
∂Skl<br />
<br />
Skl=0<br />
. (1.27)<br />
L’equazione (1.26) è nota come legge di Hooke e costituisce la<br />
relazione di proporzionalità tra tensioni e deformazioni attraverso<br />
le 81 componenti cijkl del tensore di rigidità, espresse in newton<br />
al metro quadrato.<br />
La simmetria dei tensori Tij e Skl consente di scambiare la<br />
coppia di indici ij e la coppia kl, per cui<br />
cijkl = cjikl cijkl = cijlk (1.28)<br />
ed il numero di costanti indipendenti si riduce da 81 a 36.
1.3 Legge di Hooke 16<br />
Facendo uso nella (1.26) dell’espressione (1.3) del tensore sim-<br />
metrico Skl, la legge di Hooke può essere riscritta in termini di<br />
spostamenti come:<br />
Tij = 1<br />
2 cijkl<br />
∂uk<br />
∂xl<br />
+ 1<br />
2 cijkl<br />
∂ul<br />
∂xk<br />
ed essendo cijkl = cijlk si ottiene in definitiva<br />
Tij = cijkl<br />
(1.29)<br />
∂ul<br />
. (1.30)<br />
∂xk<br />
È opportuno sostituire la notazione tensoriale che fa uso degli<br />
indici i, j, k, l, con quella matriciale; poste le seguenti corrispon-<br />
denze<br />
(11) ↔ 1 (22) ↔ 2 (33) ↔ 3<br />
(23) = (32) ↔ 4 (31) = (13) ↔ 5 (12) = (21) ↔ 6 ,<br />
(1.31)<br />
è sufficiente utilizzare due indici α e β con valori da 1 a 6, in modo<br />
che α sia associato a (ij) e β a (kl) 7 .<br />
Impiegando tale notazione, la legge di Hooke (1.26) può essere<br />
riscritta nella forma<br />
ma questo richiede che Sβ sia definito come<br />
Tα = cαβSβ, (1.32)<br />
S1 = S11, S2 = S22, S3 = S33, S4 = 2S23, S5 = 2S13, S6 = 2S12 .<br />
L’inversione della legge di Hooke consente di esprimere le de-<br />
formazioni in termini di tensioni:<br />
7 Ad esempio: cαβ = c14 = cijkl = c1123 = c1132.<br />
Sij = sijklTkl . (1.33)
1.3 Legge di Hooke 17<br />
Tensioni (10 9 Pa)<br />
0<br />
-50<br />
-100<br />
-150<br />
Scarico<br />
C<br />
Carico<br />
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0<br />
Deformazioni (%)<br />
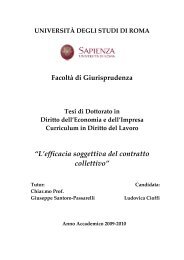
Figura 1.4: Curva tensione-deformazione del PZT-8 ([6]).<br />
Il legame tra le due grandezze è ora realizzato dalle componenti<br />
sijkl del tensore di elasticità, che gode delle stesse proprietà di<br />
simmetria del tensore cijkl. Facendo uso della simbologia (1.31) si<br />
avrà:<br />
Sα = sαβTβ . (1.34)<br />
Una tipica curva tensione-deformazione per materiali piezoelet-<br />
trici ceramici (PZT-8) è illustrata in figura 1.4. Essa è stata ot-<br />
tenuta da uno studio sperimentale [6] compiuto su dischi ceramici<br />
sottoposti a prove di compressione parallelamente all’asse di po-<br />
larizzazione. Sollecitando i provini in modo tale che il tasso di<br />
crescita della tensione fosse di 0.25·10 9 Pa/s in fase di carico e<br />
di 0.5·10 9 Pa/s in fase di scarico, è stata messa in evidenza la<br />
comparsa di un ciclo di isteresi. L’andamento iniziale della curva<br />
è circa lineare. All’aumentare del carico si ha un discostamento
1.4 Equazioni costitutive di campo 18<br />
dalla linearità con una riduzione del modulo elastico tangente 8 fin<br />
quando, procedendo ulteriormente nell’incremento di tensione, si<br />
giunge ad un valore critico in corrispondenza del punto di flesso C<br />
caratterizzato dalla minima rigidità. Si ha quindi un irrigidimento<br />
del materiale con un riavvicinamento alla linearità. Raggiunta la<br />
tensione massima e procedendo allo scarico del campione, si segue<br />
un ramo della curva differente dal percorso di andata. Al valore<br />
nullo di tensione si riscontra una deformazione residua.<br />
Da tale fenomenologia si deduce un comportamento del mate-<br />
riale contraddistinto da un graduale rilassamento elastico, seguito<br />
da un irrigidimento a partire dal punto C della curva di carico.<br />
Evidenti sono le caratteristiche di inelasticità dovute all’isteresi e<br />
quindi l’applicazione della legge di Hooke alle ceramiche piezoelet-<br />
triche andrà fatta rispettando rigorosamente l’ipotesi di piccole<br />
deformazioni. Diversamente, bisognerebbe utilizzare un modello<br />
teorico più complesso [6] che permetta di prendere in considera-<br />
zione i fenomeni descritti.<br />
1.4 Equazioni costitutive di campo<br />
Si è detto che nei materiali piezoelettrici alla propagazione delle<br />
grandezze elastiche si accompagna quella di un campo elettrico,<br />
che risultano così quantità tra loro accoppiate; dopo aver trattato,<br />
con la legge di Hooke, l’aspetto puramente meccanico, occorre<br />
8 Il modulo tangente indica la pendenza della curva tensione-deformazione.
1.4 Equazioni costitutive di campo 19<br />
introdurre equazioni che siano contemporaneamente funzione delle<br />
variabili di campo deformazione meccanica S e campo elettrico E.<br />
La prima equazione si riferisce allo spostamento elettrico Di ed<br />
assume la forma<br />
in cui il tensore e E ijk<br />
Di = ɛ S ijEj + e E ijkSjk , (1.35)<br />
di rango tre contiene le costanti piezoelettriche<br />
espresse in coulomb al metro quadrato e fornisce la variazione di<br />
Di rispetto Sij, quando si tenga costante il campo elettrico:<br />
e E ijk =<br />
<br />
∂Di<br />
∂Sjk<br />
E<br />
. (1.36)<br />
La simmetria del tensore Sjk consente di scambiare tra loro gli ulti-<br />
mi due indici del tensore e E ijk<br />
indipendenti passa così da 27 a 18.<br />
Il tensore ɛ S ij<br />
ed il numero di costanti piezoeletriche<br />
del secondo ordine è costituito dalle costanti dielet-<br />
triche (permittività) espresse in F/m e tiene conto della variazione<br />
dello spostamento dovuta al campo elettrico, in condizioni di de-<br />
formazione costante:<br />
ɛ S ij =<br />
<br />
∂Di<br />
∂Ej<br />
S<br />
. (1.37)<br />
La seconda equazione deriva da considerazioni termodinamiche<br />
[1] relative alla variazione di energia interna durante una trasfor-<br />
mazione reversibile cui sia soggetto il materiale piezoelettrico.<br />
Essa consente di esprimere la variabile tensione meccanica come<br />
Tjk = −e S ijkEi + c E jklmSlm . (1.38)<br />
I coefficienti di proporzionalità che compaiono nel secondo mem-<br />
bro della precedente, mostrano che un campo elettrico o una de-
1.5 Numero di costanti indipendenti nei sistemi cristallografici 20<br />
formazione sono capaci di produrre una tensione meccanica Tjk,<br />
rispettivamente in condizioni di deformazione o campo elettrico<br />
costante 9 :<br />
e S ijk = −<br />
∂Tjk<br />
<br />
∂Ei<br />
<br />
c E <br />
∂Tjk<br />
jklm =<br />
∂Slm<br />
S<br />
E<br />
(N/Vm) (1.39)<br />
(N/m 2 ) . (1.40)<br />
Facendo uso della notazione matriciale in accordo alle conven-<br />
zioni (1.31), le equazioni (1.35) e (1.38) possono essere riscritte<br />
come<br />
Di = ɛ S ijEj + e E iαSα<br />
(1.41a)<br />
Tα = c E αβSβ − e S iαEi ; (1.41b)<br />
esse rappresentano le equazioni costitutive che governano il com-<br />
portamento elastico e piezoelettrico, fornendo lo spostamento elet-<br />
trico e la tensione meccanica in termini delle variabili indipendenti<br />
campo elettrico e deformazione.<br />
1.5 Numero di costanti indipendenti nei siste-<br />
mi cristallografici<br />
In questo paragrafo ci si limiterà a riportare alcuni risultati<br />
notevoli relativi all’argomento in esame; una trattazione appro-<br />
fondita del problema può comunque trovarsi nei riferimenti bibli-<br />
ografici [1], [3], [4].<br />
La matrice 6 × 6 dei moduli elastici c E αβ<br />
presenta simmetria<br />
rispetto la diagonale principale, per cui il numero di costanti<br />
9 Nella simbologia si è omesso di indicare la costanza dell’entropia.
1.5 Numero di costanti indipendenti nei sistemi cristallografici 21<br />
indipendenti passa da 36 a 21:<br />
(c E <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
αβ) = <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
c11 c12 c13 c14 c15 c16<br />
c12 c22 c23 c24 c25 c26<br />
c13 c23 c33 c34 c35 c36<br />
c14 c24 c34 c44 c45 c46<br />
c15 c25 c35 c45 c55 c56<br />
c16 c26 c36 c46 c56 c66<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
triclino. (1.42)<br />
Ulteriori semplificazioni possono derivare dalla simmetria propria<br />
di ciascun sistema cristallografico. I casi estremi sono rappresen-<br />
tati dal sistema triclino, per il quale il numero di costanti rimane<br />
inalterato a 21 come nella matrice (1.42), e dai solidi isotropi,<br />
che, dotati di elevata simmetria 10 , sono caratterizzabili attraverso<br />
le due sole costanti elastiche, dette costanti di Lamè, λ e µ, tali<br />
che<br />
c11 = c22 = c33 = λ + 2µ<br />
c12 = c23 = c13 = λ<br />
c44 = c55 = c66 = c11−c12<br />
2<br />
e le restanti componenti della (1.42) nulle 11 :<br />
= µ,<br />
(1.43)<br />
10 Il tensore di rigidità per solidi isotropi è invariante rispetto a cambiamenti di assi,<br />
rotazioni e simmetrie rispetto un punto o un piano.<br />
11 In alternativa a λ e µ, si possono utilizzare il modulo di Young Y ed il coefficiente di<br />
Poisson ν.
1.5 Numero di costanti indipendenti nei sistemi cristallografici 22<br />
(c E αβ) =<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
c11 c12 c12 0 0 0<br />
c12 c11 c12 0 0 0<br />
c12 c12 c11 0 0 0<br />
0 0 0 c44 0 0<br />
0 0 0 0 c44 0<br />
0 0 0 0 0 c44<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
isotropo. (1.44)<br />
I rimanenti sistemi cristallini sono descrivibili da un numero di<br />
costanti che oscilla all’interno dei suddetti limiti. In particolare,<br />
si vogliono ancora citare i cristalli della classe 6mm appartenenti<br />
al sistema esagonale 12 , la cui matrice di rigidità presenta 5 com-<br />
ponenti indipendenti:<br />
(c E αβ) =<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
con c66 = (c11 − c12)/2.<br />
c11 c12 c13 0 0 0<br />
c12 c11 c13 0 0 0<br />
c13 c13 c33 0 0 0<br />
0 0 0 c44 0 0<br />
0 0 0 0 c44 0<br />
0 0 0 0 0 c66<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
classe 6mm, (1.45)<br />
Le matrici piezoelettriche e dielettriche dispongono, nel caso<br />
più generale di anisotropia (sistema triclino), rispettivamente di<br />
18 e 6 costanti significative. Facendo ancora riferimento alla classe<br />
12 Il sistema esagonale dispone di un asse principale cristallografico proveniente dalla<br />
combinazione di un asse diadico con uno triadico.
1.5 Numero di costanti indipendenti nei sistemi cristallografici 23<br />
6mm, la simmetria cristallografica riduce il numero di costanti in-<br />
dipendenti a 3 e 2, nell’ordine:<br />
(e E iα) =<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
0 0 0 0 e15 0<br />
0 0 0 e15 0 0<br />
e31 e31 e33 0 0 0<br />
(ɛ S ij) =<br />
<br />
<br />
<br />
<br />
ɛ11 0 0 <br />
<br />
<br />
<br />
<br />
0 ɛ11 0 <br />
<br />
<br />
<br />
<br />
0 0 ɛ33 <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
classe 6mm, (1.46)<br />
classe 6mm. (1.47)<br />
Si può dimostrare che le proprietà elasto-elettriche di un cristallo<br />
della classe 6mm sono invarianti per rotazioni intorno l’asse prin-<br />
cipale; i piani che contengono questo asse sono equivalenti tra loro<br />
e il materiale è trasversalmente isotropo.<br />
Nelle ceramiche piezoelettriche (PZT), tale isotropia si manife-<br />
sta perpendicolarmente alla direzione di polarizzazione e ciò rende<br />
possibile rappresentare le caratteristiche elastiche, piezoelettriche<br />
e dielettriche dei PZT (Tabella 1.1) attraverso le matrici proprie<br />
della classe 6mm.<br />
c11 c12 c13 c33 c44 c66 e15 e31 e33 ɛ11 ɛ33<br />
(10 10 N/m 2 ) (C/m 2 ) (10 −11 F/m)<br />
14.9 8.11 8.11 13.2 3.13 3.39 12.7 -5.2 15.1 650 560<br />
Tabella 1.1: Costanti elastiche, piezoelettriche e dielettriche della ceramica<br />
PZT-8.
Capitolo 2<br />
Onde in mezzi elastici<br />
Dopo aver introdotto nel precedente capitolo le equazioni fon-<br />
damentali della teoria dell’elasticità, si vuole ora procedere allo<br />
studio della propagazione di onde nei materiali.<br />
Al paragrafo 2.1 si considera il caso di propagazione libera<br />
introducendo l’equazione d’onda dapprima nella forma generale<br />
valida per i solidi, estesa poi al caso dei materiali piezoelettrici ed<br />
infine ricavata anche per i fluidi.<br />
Rimane ancora una precisazione circa l’ipotesi di corpo con-<br />
tinuo: essa richiede che la lunghezza d’onda sia molto maggiore<br />
delle distanze interatomiche nel materiale; quando infatti le due<br />
grandezze diventino comparabili, il mezzo non è più continuo<br />
rispetto alla scala di variazione spaziale delle variabili meccaniche,<br />
ed assume proprietà dispersive. Nota la velocità di propagazione,<br />
risulta fissato un limite superiore per la frequenza dell’onda oltre il<br />
quale la propagazione è impedita. Tuttavia, le comuni applicazioni<br />
dei risonatori piezoelettrici, anche quando avvengano alle più alte<br />
frequenze (10 GHz), permettono di ritenere verificata l’ipotesi di
2.1 Equazione d’onda 25<br />
corpo continuo senza necessità di imporre restrizioni alcune.<br />
2.1 Equazione d’onda<br />
2.1.1 Propagazione nei solidi<br />
Si consideri un solido localmente in moto per effetto di un di-<br />
sturbo propagantesi al suo interno. Nell’ipotesi semplificativa di<br />
assenza di forze di volume fi, l’equazione del moto (1.11) si riduce<br />
a<br />
ρ ∂2ui ∂t2 ∂Tik<br />
= .<br />
∂xk<br />
(2.1)<br />
Combinando la precedente con l’espressione del tensore delle ten-<br />
sioni Tik fornita dalla legge di Hooke nella forma (1.30), si giunge<br />
ad un’equazione nella sola incognita spostamento u:<br />
ρ ∂2 ui<br />
∂t<br />
2 = cijkl<br />
∂ 2 ul<br />
. (2.2)<br />
∂xj∂xk<br />
Quest’ultima rappresenta l’equazione delle onde valida in tre di-<br />
mensioni per un mezzo elastico lineare in assenza di forze ester-<br />
ne e di dissipazione, e costituisce un sistema di tre equazioni<br />
differenziali del secondo ordine nelle incognite ui.<br />
Una soluzione immediata è fornita da un’onda piana monocro-<br />
matica di ampiezza A, pulsazione ω e vettore d’onda k, esprimi-<br />
bile in forma complessa come<br />
u = Ae j(ωt−k·x)<br />
(2.3)<br />
che, sostituita nell’equazione (2.2), consente di eliminare la dipen-<br />
denza temporale e studiare il problema attraverso la cosiddetta
2.1 Equazione d’onda 26<br />
equazione di Christoffel [1]<br />
ρω 2 Ai = cijklkjkkAl , (2.4)<br />
la quale può essere scritta in forma migliore introducendo il ten-<br />
sore di Kronecker δil ed il tensore di Christoffel Γil = cijklkjkk:<br />
(ρω 2 δil − Γil)Al = 0 . (2.5)<br />
Il sistema omogeneo (2.5) mostra che la polarizzazione Al dell’on-<br />
da, indicante la direzione dello spostamento delle particelle costi-<br />
tuenti il mezzo 1 , è un autovettore del tensore Γil con autovalore<br />
γ = ρω 2 legato alla velocità di propagazione dell’onda o velocità<br />
di fase 2 V f = ω/k.<br />
Per una data direzione, ci sono in generale tre velocità di fase<br />
che sono le soluzioni dell’equazione secolare<br />
|ρω 2 δil − Γil| = 0 , (2.6)<br />
che esprime la relazione di dispersione fra la frequenza dell’onda<br />
ed il suo numero d’onda. Come detto, per ciascuna velocità, cioè<br />
per ciascun autovalore, esiste un corrispondente autovettore che<br />
fornisce la direzione di spostamento delle particelle. La simmetria<br />
del tensore di rigidità cijkl trasferisce la stessa proprietà al tensore<br />
Γil, che risulterà così dotato di autovalori reali e autovettori or-<br />
togonali. Da ciò si desume che tre onde piane con polarizzazioni<br />
1 Una convenzione alternativa considera come direzione di polarizzazione quella ortogonale<br />
allo spostamento delle particelle.<br />
2 La definizione indica la velocità con cui un ipotetico osservatore si deve muovere per<br />
vedere l’onda con la medesima fase in ogni istante.
2.1 Equazione d’onda 27<br />
ortogonali tra loro possono propagarsi nella stessa direzione con<br />
differenti velocità.<br />
Un’onda è detta dispersiva se la sua velocità di propagazione<br />
non è costante, ma dipende da k e quindi dalla frequenza. Questo<br />
deriva dal fatto che una soluzione generale dell’equazione d’onda è<br />
rappresentata dalla sovrapposizione di diverse onde di tipo (2.3),<br />
costituenti un pacchetto di onde. Se la velocità di fase non è la<br />
stessa per tutti i k, quindi ω = ck, dove c è una costante, allora le<br />
soluzioni con diversi vettori d’onda si propagano a velocità diverse,<br />
ossia si disperdono. La quantità importante per un pacchetto<br />
d’onde aventi diversi k diviene quindi la velocità di gruppo definita<br />
come V g = dω/dk.<br />
Per mezzi isotropi ogni direzione di propagazione è equivalente.<br />
Considerando ad esempio un’onda monocromatica u = Ae j(ωt−kx1)<br />
in moto lungo l’asse x1 di un sistema di riferimento ortogonale<br />
Ox1x2x3, l’equazione di Christoffel restituisce le tre relazioni<br />
<br />
ω<br />
2 A1 =<br />
k<br />
c11<br />
ρ A1<br />
(2.7a)<br />
<br />
ω<br />
2 A2 =<br />
k<br />
c44<br />
ρ A2<br />
<br />
ω<br />
2 A3 =<br />
k<br />
(2.7b)<br />
c44<br />
ρ A3 . (2.7c)<br />
La prima rappresenta un’onda polarizzata longitudinalmente in<br />
direzione x1 con velocità di fase VL = c11/ρ, le rimanenti si<br />
riferiscono a due onde trasversali polarizzate secondo gli assi x2<br />
ed x3 e che viaggiano alla medesima velocità VT = c44/ρ =<br />
(c11 − c12)/2ρ.
2.1 Equazione d’onda 28<br />
A (3)<br />
A (2)<br />
k<br />
A (1)<br />
Figura 2.1: Vettori spostamento dell’onda quasi-longitudinale (A (1) ) e delle<br />
onde quasi-trasversali (A (2) , A (3) ) nel caso di mezzo anisotropo.<br />
Nel caso di mezzi anisotropi la propagazione ha invece carattere<br />
direzionale. Il vettore spostamento u non è generalmente paral-<br />
lelo o perpendicolare alla direzione di propagazione individuata<br />
da k, come appare in figura 2.1. L’onda con polarizzazione più<br />
vicina a k è chiamata quasi-longitudinale, le altre due sono dette<br />
quasi-trasversali. Queste ultime, di solito, si propagano a velocità<br />
minore delle onde quasi-longitudinali.<br />
2.1.2 Propagazione nei materiali piezoelettrici<br />
Al paragrafo 1.2.3 si è detto che nello studio della propagazione<br />
delle onde elastiche nei materiali piezoelettrici il campo elettri-<br />
co può essere assunto di tipo quasi-statico e quindi derivato dal<br />
potenziale scalare Φ secondo la relazione Ek = −(∂Φ/∂xk). Sosti-<br />
tuendo tale relazione ed il tensore simmetrico di deformazione<br />
<br />
nell’equazione costitutiva (1.38), si ottiene<br />
Skl = 1<br />
2<br />
∂ul<br />
∂xk<br />
+ ∂uk<br />
∂xl<br />
Tij = c E ijkl<br />
∂ul<br />
∂xk<br />
+ e S kij<br />
∂Φ<br />
, (2.8)<br />
∂xk
2.1 Equazione d’onda 29<br />
che inserita nell’equazione del moto (2.1) in assenza di forze di<br />
volume, restituisce<br />
ρ ∂2 ui<br />
∂ 2 ul<br />
∂t2 = cEijkl ∂xj∂xk<br />
+ e S kij<br />
∂2Φ . (2.9)<br />
∂xj∂xk<br />
Effettuando le analoghe sostituzioni nell’equazione costitutiva<br />
(1.35), si giunge a<br />
Dj = e E jkl<br />
∂ul<br />
∂xk<br />
− ɛ S ∂Φ<br />
jk , (2.10)<br />
∂xk<br />
con lo spostamento elettrico Dj che deve soddisfare l’equazione di<br />
Poisson ∂Dj/∂xj = 0, per cui<br />
e E jkl<br />
∂2ul − ɛ<br />
∂xj∂xk<br />
S ∂<br />
jk<br />
2Φ = 0 . (2.11)<br />
∂xj∂xk<br />
Anche in questo caso si può pensare di ricercare una soluzione<br />
alle equazioni (2.9) e (2.11) nella forma di un’onda piana monocro-<br />
matica propagantesi secondo la direzione k, del tipo<br />
u = Ae j(ωt−k·x)<br />
e Φ = Φ0e j(ωt−k·x) , (2.12)<br />
le quali, per sostituzione, consentono di ricavare il sistema di<br />
equazioni accoppiate di campo<br />
⎧<br />
⎨<br />
⎩<br />
ρω 2 Ai = ΓilAl + γiΦ0<br />
γlAl − ɛΦ0 = 0<br />
in cui si sono definite le quantità<br />
, (2.13)<br />
Γil = c E ijklkjkk , γi = e E kijkjkk , ɛ = ɛ S jkkjkk .<br />
Dalla seconda equazione del sistema (2.13) si ricava Φ0 = γlAl/ɛ e<br />
sostituendo nella prima si ottiene l’equazione di Christoffel valida
2.1 Equazione d’onda 30<br />
per materiali piezoelettrici, e cioè<br />
<br />
ρω 2 <br />
−<br />
Γil + γiγl<br />
ɛ<br />
<br />
Al = 0 , (2.14)<br />
che ha come soluzioni tre onde piane elastiche propagantesi se-<br />
condo k, le cui velocità di fase V f = ω/k sono ricavabili dagli<br />
autovalori ¯γ = ρω 2 di un tensore simmetrico di rango due definito<br />
in questo caso come<br />
¯Γil = Γil + γiγl<br />
ɛ<br />
, (2.15)<br />
mentre le polarizzazioni Al, mutuamente ortogonali, sono date dai<br />
corrispondenti autovettori.<br />
L’influenza della piezoelettricità nell’equazione d’onda appare<br />
quindi esprimibile in termini di costanti elastiche modificate, di<br />
natura fittizia in quanto definite solo per onde piane e dipendenti<br />
dalla direzione di propagazione, del tipo<br />
¯cijkl = c E ijkl + (eE pij kp)(e E qkl kq)<br />
ɛ S jk kjkk<br />
che fanno assumere al tensore di Christoffel la forma ¯ Γil = ¯cijklkjkk.<br />
2.1.3 Propagazione nei fluidi<br />
Paragonata al caso dei solidi, la propagazione in un fluido com-<br />
pressibile, come ad esempio l’aria, può trattarsi in maniera più<br />
semplice impiegando un parametro di tipo scalare con cui sia pos-<br />
sibile caratterizzare l’ampiezza di oscillazione di una particella di<br />
fluido 3 .<br />
3 Col termine particella di fluido si indica un volume di materiale sufficientemente ampio<br />
da poter ignorare l’aspetto molecolare, ma molto più piccolo della lunghezza d’onda in modo<br />
da verificare l’ipotesi di mezzo continuo.<br />
,
2.1 Equazione d’onda 31<br />
Si consideri, in particolare, la propagazione tridimensionale in<br />
un fluido continuo, omogeneo, isotropo, perfettamente compres-<br />
sibile (elastico) e nel quale siano assenti fenomeni di dissipazione.<br />
Indicata con p(x, t) la pressione istantanea nel punto x, è conve-<br />
niente scegliere come variabile scalare associata all’onda acustica<br />
la sovrappressione δp(x, t), cioè la pressione locale riferita alla<br />
pressione di equilibrio p0(x):<br />
δp(x, t) = p(x, t) − p0(x) . (2.16)<br />
Sotto l’azione della sovrappressione δp, un elemento di superficie<br />
di area ds subisce uno spostamento u(x, t); indicato con n il ver-<br />
sore normale alla superficie, il volume spazzato è (u · n)ds, con<br />
una variazione pari a<br />
<br />
∆V = (u · n)ds (2.17)<br />
s<br />
e, facendo uso del teorema della divergenza, quest’ultima diviene<br />
<br />
<br />
∆V = (∇ · u)dV = S(x)dV , (2.18)<br />
V<br />
in cui S(x) = δ(dV )/dV è la dilatazione locale che fornisce il<br />
cambiamento relativo di volume di una particella di fluido come<br />
divergenza del vettore spostamento:<br />
V<br />
S(x) = ∇ · u . (2.19)<br />
In assenza di forze esterne applicate, scrivendo la seconda equa-<br />
zione della dinamica per un cubo elementare di volume fluido [1]<br />
si giunge all’equilibrio secondo gli assi ortogonali di un sistema di
2.1 Equazione d’onda 32<br />
riferimento Ox1x2x3, espresso da equazioni che legano la pressione<br />
p alle componenti ui dello spostamento e che assumono la forma<br />
ρ0 ∂2 u1<br />
∂t 2 = − ∂p<br />
∂x1 riferendosi, ad esempio, all’asse x1. Volendo sinte-<br />
tizzare le tre equazioni in un’unica espressione vettoriale, si può<br />
scrivere<br />
ρ0<br />
∂2u = −∇(δp) = −grad δp , (2.20)<br />
∂t2 ed applicando l’operatore divergenza ad entrambi i membri, si<br />
ottiene<br />
ρ0<br />
∂2S = −∆(δp) , (2.21)<br />
∂t2 nella quale si è tenuto conto del risultato (2.19) e si è indicato con<br />
∆ l’operatore Laplaciano 4 .<br />
La sovrappressione δp è in relazione al cambiamento di vo-<br />
lume attraverso il coefficiente di compressibilità χ, sufficiente a<br />
caratterizzare il comportamento elastico di un fluido non viscoso<br />
e definito come<br />
χ = − 1<br />
dV<br />
δ(dV )<br />
δp<br />
(1/Pa) . (2.22)<br />
Nel campo dell’acustica lineare, il coefficiente χ consente di espri-<br />
mere il legame tra dilatazione e sovrappressione interpretabile<br />
come l’equivalente della legge di Hooke per il caso dei fluidi:<br />
δp = − S<br />
. (2.23)<br />
χ<br />
Eliminando la dilatazione S tra le equazioni (2.21), (2.23), si<br />
giunge alla ricercata equazione d’onda, valida in campo lineare per<br />
4 ∆ = ∇ · ∇ = ∂ 2<br />
∂x 2 + ∂2<br />
∂y 2 + ∂2<br />
∂z 2 .
2.1 Equazione d’onda 33<br />
fluidi non viscosi in assenza di forze esterne applicate:<br />
∆(δp) = 1<br />
c2 ∂2 (δρ)<br />
∂t2 , (2.24)<br />
dove c = 1/ √ ρ0χ è la velocità di propagazione dell’onda, che as-<br />
sume valori dipendenti dalla trasformazione termodinamica segui-<br />
ta dal fluido.<br />
Un’onda viaggiante in un fluido presenta tipicamente polariz-<br />
zazione longitudinale, ovvero parallela al vettore d’onda k; ciò è<br />
connesso all’incapacità di un fluido non viscoso di trasmettere al<br />
suo interno sforzi di taglio e quindi di presentare moti trasversali;<br />
appare così giustificato l’impiego di una variabile scalare adatta a<br />
fornire l’unica soluzione dell’equazione d’onda (2.24).<br />
2.1.4 Attenuazione<br />
Finora si è ammesso che l’ampiezza di oscillazione dei punti<br />
investiti da un’onda piana armonica fosse ovunque la stessa. In<br />
realtà, in un mezzo reale, sono sempre presenti fenomeni dissi-<br />
pativi che convertono parte dell’energia di vibrazione in energia<br />
termica; di conseguenza l’ampiezza di oscillazione delle particelle<br />
e quindi l’ampiezza dell’onda si attenua con la distanza dalla sor-<br />
gente. Molteplici sono le forme di assorbimento dell’energia ela-<br />
stica che possono presentarsi nel mezzo: per i cristalli, se ne tiene<br />
conto inserendo un termine dissipativo nella legge di Hooke, che<br />
così diventa [1]<br />
∂Skl<br />
Tij = cijklSkl + ηijkl<br />
∂t<br />
(2.25)
2.1 Equazione d’onda 34<br />
e mostra come il tensore di attrito viscoso ηijkl, in unità newton<br />
al secondo al metro quadrato, determini col proprio contributo<br />
un ritardo temporale nella risposta del sistema. L’impiego della<br />
relazione generalizzata (2.25) fa comparire un termine aggiuntivo<br />
nell’equazione d’onda (2.2), che assume l’aspetto<br />
ρ ∂2 ui<br />
∂t<br />
2 = cijkl<br />
∂ 2 ul<br />
∂xj∂xk<br />
∂ 3 ul<br />
+ ηijkl . (2.26)<br />
∂xj∂xk∂t<br />
Analoghe considerazioni, applicate alla relazione (2.23), con-<br />
sentono di modificare l’equazione d’onda valida nel caso dei fluidi.<br />
Si introduce, inoltre, un coefficiente di assorbimento α, con di-<br />
mensioni fisiche pari all’inverso di una lunghezza, che permette di<br />
valutare l’attenuazione di ampiezza per mezzo di un’esponenziale<br />
decrescente con lo spazio percorso dall’onda, cioè<br />
Al(xi) = A0,l e −αxi , (2.27)<br />
avendo indicato con A0,l l’ampiezza dello spostamento di una par-<br />
ticella di fluido in corrispondenza della sorgente.<br />
Si riportano di seguito i principali effetti dissipativi che possono<br />
presentarsi in mezzi solidi e fluidi (si vedano i riferimenti [1], [7],<br />
[9]).<br />
• Le successive compressioni e decompressioni del mezzo du-<br />
rante la propagazione dell’onda causano rispettivamente ri-<br />
scaldamento e raffreddamento: se il mezzo fosse ideale, l’ener-<br />
gia vibrazionale trasformata in energia termica durante la<br />
compressione dovrebbe essere integralmente restituita durante<br />
la decompressione. La natura del fenomeno si presenta in
2.1 Equazione d’onda 35<br />
realtà diversamente sia per la conducibilità termica del flui-<br />
do sia per l’irraggiamento: energia termica fluisce dalle zone<br />
calde a quelle fredde sottraendosi all’onda. Il coefficiente di<br />
assorbimento dovuto alla conducibilità termica dipende dal<br />
quadrato della frequenza f ed è dato per onde longitudinali<br />
da [9]<br />
αc = 2π2 f 2<br />
V 3<br />
µ − 1<br />
K , (2.28)<br />
essendo V la velocità dell’onda, µ il rapporto tra il calore<br />
specifico a pressione costante cp e quello a volume costante<br />
cV , K il coefficiente di conducibilità termica.<br />
• I domini che costituiscono i materiali ferroelettrici (si veda il<br />
paragrafo 1.1) si comportano come regioni elementari ciascu-<br />
na con una propria polarizzazione elettrica. Quando un’onda<br />
ultrasonora attraversa una di tali regioni, il dominio è in-<br />
teressato da tensioni periodiche che causano un controeffetto<br />
elettrostrittivo e quindi un cambiamento nell’intensità di po-<br />
larizzazione. Ciò determina un’isteresi elettrica locale, con<br />
conseguente attenuazione dell’onda in virtù della conversione<br />
di energia meccanica in calore.<br />
• Anche nei fluidi il moto delle particelle investite dall’onda è<br />
ostacolato dalla viscosità: si ha per il coefficiente di assorbi-<br />
mento [7]<br />
αη = 8<br />
3<br />
cp<br />
π2f 2<br />
η , (2.29)<br />
V 2
2.1 Equazione d’onda 36<br />
θ<br />
O<br />
z<br />
θ<br />
r<br />
Figura 2.2: Sistema di coordinate cilindriche associate al tubo piezoelettrico<br />
di raggio interno a, raggio esterno b ed altezza l.<br />
con η coefficiente di viscosità. Il coefficiente αc nei fluidi è in<br />
genere minore di αη e spesso può essere trascurato.<br />
b<br />
a<br />
l
Capitolo 3<br />
Oscillazioni non lineari<br />
Definire un sistema fisico di tipo lineare, presuppone di specifi-<br />
care l’intervallo di variabilità dei parametri all’interno del quale il<br />
comportamento lineare è verificato. Ad esempio, la relazione tra<br />
forza di richiamo elastico ed elongazione di una molla è di tipo pro-<br />
porzionale solo rimanendo nel campo delle piccole deformazioni.<br />
Oltrepassato tale limite, la forza di richiamo cresce ad un tasso<br />
maggiore dell’elongazione nel caso delle cosidette molle dure e con<br />
un tasso minore nel caso di molle soffici. Nel paragrafo 3.1, si de-<br />
scrive il cosiddetto oscillatore di Duffing, le cui caratteristiche non<br />
lineari sono rappresentate da una dipendenza della forza elastica<br />
dal cubo dell’elongazione. Sono discusse alcune particolarità della<br />
curva di risposta in frequenza di un tale tipo di oscillatore.<br />
La non linearità arrichisce enormemente la varietà di compor-<br />
tamento che un sistema può presentare. Il paragrafo 3.2 riporta<br />
considerazioni sulle modalità di risposta dell’oscillatore di Duffing<br />
ad un segnale monocromatico in ingresso. A differenza del caso<br />
lineare, la risposta può differire da una semplice oscillazione al-
3.1 Oscillatore unidimensionale di Duffing 38<br />
la medesima frequenza della forzante. L’oscillatore non lineare è<br />
infatti capace di rispondere ad un segnale monocromatico in in-<br />
gresso, con delle oscillazioni le cui frequenze sono rispettivamente<br />
multipli interi o frazionari della frequenza di pilotaggio (risonanze<br />
armoniche e subarmoniche).<br />
Le equazioni d’onda presentate al capitolo 2, sono state rica-<br />
vate sfruttando l’approssimazione lineare: nello sviluppo (1.25)<br />
del tensore degli sforzi si sono trascurati i termini del tensore<br />
delle deformazioni di ordine superiore al primo, giungendo alla<br />
legge di Hooke da cui si è ottenuta l’equazione d’onda in cam-<br />
po lineare. Se il fenomeno vibratorio presenta caratteristiche non<br />
lineari è necessario considerare nello sviluppo del tensore anche<br />
i contributi di ordine superiore al primo. Questi vengono detti<br />
termini anarmonici, ad indicare che le soluzioni delle equazioni<br />
non sono più rappresentate dalla sovrapposizione di armoniche<br />
semplici. Il paragrafo 3.3 riporta alcune modifiche da apportare<br />
all’equazione d’onda per mezzi elastici non lineari.<br />
3.1 Oscillatore unidimensionale di Duffing<br />
Un esempio di sistema oscillatorio non lineare è riportato in<br />
figura 3.1a, in cui una massa m appesa ad un filo elastico AB viene<br />
posta in vibrazione lungo l’asse x per effetto di una sollecitazione<br />
esterna sinusoidale. Per semplicità si assuma lo schema di prin-<br />
cipio equivalente in figura 3.1b costituito da una massa, da una<br />
molla non lineare e da un eventuale elemento smorzatore.
3.1 Oscillatore unidimensionale di Duffing 39<br />
A<br />
m x ≡<br />
B<br />
Figura 3.1: Oscillatore di Duffing.<br />
In assenza di smorzamento, si trova [22] che l’equazione dif-<br />
ferenziale del moto ha la forma<br />
¨x + ω 2 x = ε[−ω 2 (αx + βx 3 ) + F0 cos Ωt] ε ≪ 1 (3.1)<br />
con ω frequenza naturale del sistema, ε parametro variabile molto<br />
più piccolo di 1, α e β parametri noti legati massa e costante<br />
elastica, εF0 ampiezza della forza armonica esterna (per unità di<br />
massa) e Ω frequenza di pilotaggio. L’equazione 3.1 è nota come<br />
equazione di Duffing per un sistema privo di smorzamento: la non<br />
linearità è dovuta alla forza di richiamo elastico che presenta un<br />
termine cubico con l’elongazione della molla.<br />
Si vogliono analizzare le soluzioni periodiche dell’equazione<br />
(3.1), in particolare la possibilità dell’esistenza di una soluzione<br />
di periodo T = 2π/Ω.<br />
È conveniente cambiare la scala temporale<br />
in modo tale che il periodo di oscillazione diventi 2π: si effettuino<br />
le sostituzioni Ωt = τ + φ, d/dt = Ωd/dτ, con τ nuova varia-<br />
x
3.1 Oscillatore unidimensionale di Duffing 40<br />
bile temporale e φ fase angolare incognita, che fanno assumere<br />
all’equazione del moto l’aspetto<br />
Ω 2 x ′′ + ω 2 x = ε[−ω 2 (αx + βx 3 ) + F0 cos(τ + φ)] , (3.2)<br />
avendo indicato la differenziazione rispetto τ con l’apice ′ . Sfrut-<br />
tando un metodo perturbativo [20], si ricerchi una soluzione alla<br />
nuova equazione nella forma di serie di potenze in ε per le variabili<br />
x(τ) e φ:<br />
x(τ) = x0(τ) + εx1(τ) + ε 2 x2(τ) + . . . (3.3a)<br />
φ = φ0 + εφ1 + ε 2 φ2 + . . . . (3.3b)<br />
Per prevenire la comparsa di termini secolari, cioè termini che<br />
crescono indefinitamente nel tempo, devono essere soddisfatte le<br />
condizioni di periodicità xi(τ + 2π) = xi(τ), con i = 1, 2, . . .. La<br />
presenza di una fase φ incognita consente inoltre di scegliere le con-<br />
dizioni iniziali nella forma conveniente x ′ i (0) = 0. Introducendo le<br />
relazioni (3.3a,b) nell’equazione (3.2) ed uguagliando i coefficienti<br />
che moltiplicano le potenze di ε di stesso ordine a sinistra e destra<br />
dell’uguale, si ottiene il sistema di equazioni<br />
⎧<br />
Ω<br />
⎪⎨<br />
2x ′′<br />
0 + ω2x0 = 0<br />
Ω2x ′′<br />
1 + ω2x1 = −ω2 (αx0 + βx3 0) + F0 cos(τ + φ0)<br />
⎪⎩<br />
Ω 2 x ′′<br />
2 + ω 2 x2 = −ω 2 (αx1 + 3βx 2 0x1) − F0φ1 sin(τ + φ0)<br />
. . . ,<br />
(3.4)<br />
che deve essere risolto in sequenza per i vari xi, nel rispetto delle<br />
condizioni di periodicità ed iniziali. Dalla prima equazione si trova
3.1 Oscillatore unidimensionale di Duffing 41<br />
che<br />
<br />
ω<br />
x0(τ) = A0 cos<br />
Ω τ<br />
<br />
, (3.5)<br />
con A0 costante da determinare; il rispetto della condizione di<br />
periodicità per i = 0 richiede ω = Ω. Sostituendo il risultato (3.5)<br />
nella seconda equazione del sistema, si procede all’individuazione<br />
del termine successivo, del tipo<br />
x1(τ) = A1 cos τ + 1<br />
32 βA3 0 cos 3τ . (3.6)<br />
In questo caso si trova che la condizione di periodicità con i = 1<br />
è soddisfatta solo se<br />
αA0 + 3<br />
4 βA30 ∓ F0<br />
= 0 (3.7)<br />
ω2 dove il segno che precede l’ultimo termine è negativo se φ0 = 0 e<br />
positivo se φ0 = π. Nel primo caso la risposta del primo ordine<br />
x0 è in fase con la forza esterna, mentre nel secondo caso x0 è in<br />
controfase con la sollecitazione; quest’ultima situazione tuttavia,<br />
è equivalente ad una risposta in fase con ampiezza negativa, per<br />
cui ci si può limitare a considerare nella relazione (3.7) il termine<br />
negativo corrispondente a sfasamento φ0 nullo. La stessa relazione<br />
determina univocamente il valore di A0 da inserire nella soluzione<br />
del primo ordine (3.5).<br />
Le risposte di ordine superiore (i > 1) si trovano iterando il<br />
procedimento per sostituzioni successive fin qui seguito; ad esem-<br />
pio per i = 2, il termine x2(τ) è fornito dalla terza equazione<br />
del sistema (3.4) facendo uso dei risultati già noti per x0 ed x1.
3.1 Oscillatore unidimensionale di Duffing 42<br />
La condizione di periodicità fornisce inoltre il valore di A1 (con<br />
φ1 = 0) da inserire nella risposta (3.6) del passo precedente.<br />
Seguendo il metodo illustrato, la soluzione approssimata al<br />
secondo ordine per l’equazione di Duffing (3.1) risulta essere<br />
x(t) = (A0 + εA1 + ε 2 A2) cos ωt +<br />
+ ε<br />
32 βA2 0[A0 + ε(3A1 + 1<br />
8 αA0 + 3<br />
16 βA3 0)] cos 3ωt +<br />
+ 1<br />
1024 β2 A 5 0 cos 5ωt , (3.8)<br />
avendo fatto uso della variabile indipendente originaria t. La fase<br />
φ per il sistema privo di smorzamento è nulla indipendentemente<br />
dall’ordine di approssimazione.<br />
È interessante analizzare la curva di risposta del sistema in<br />
esame per mettere in luce un tipico comportamento degli oscilla-<br />
tori non lineari. Si introduca la notazione<br />
ω 2 0 = (1 + εα)ω 2<br />
(3.9)<br />
per indicare la frequenza naturale ω0 del sistema linearizzato cor-<br />
rispondente al caso β = 0. Utilizzando tale espressione per elimi-<br />
nare α dall’equazione (3.7) in cui si assuma il segno meno e si<br />
consideri che ε è molto minore di uno, si giunge a<br />
ω 2 = ω 2 0(1 + 3<br />
4εβA2 0) − εF0<br />
. (3.10)<br />
A0<br />
Se si considera εβ noto, la relazione (3.10) consente di traccia-<br />
re la curva |A0| in funzione di ω espressa in termini di ω0, con<br />
εF0 assunto come parametro. La figura 3.2 riporta nel caso (a)<br />
la risposta di un oscillatore non smorzato la cui molla presenti la
3.1 Oscillatore unidimensionale di Duffing 43<br />
(a)<br />
(b)<br />
Figura 3.2: Risposta in frequenza dell’oscillatore di Duffing privo di<br />
smorzamento. (a) Caso di molla dura. (b) Caso di molla soffice.<br />
tendenza ad un irrigidimento all’aumentare dell’elongazione (mol-<br />
la dura con β > 0). Per β = 0 (oscillatore lineare) si osservano due<br />
rami di curva parametrici in εF0 che tendono asintoticamente alla<br />
retta verticale ω = ω0 corrispondente alla vibrazione libera con<br />
F0 = 0. Quando εβ > 0 l’oscillazione libera è rappresentata da<br />
un tratto di parabola che interseca l’asse ω in ω0. I rami di curva<br />
variabili con εF0 si dispongono superiormente ed inferiormente a<br />
tale parabola. L’effetto della non linearità consiste quindi in una<br />
flessione verso destra dell’asintoto verticale ω = ω0 e dei diversi<br />
rami che rappresentano le curve di risposta. Un comportamento
3.1 Oscillatore unidimensionale di Duffing 44<br />
analogo, ma con flessione verso sinistra, si riscontra nel caso (b)<br />
della stessa figura, che si riferisce ad un oscillatore la cui molla<br />
abbia rigidezza decrescente all’aumentare dell’elongazione (molla<br />
soffice con β < 0).<br />
In assenza di smorzamento un sistema massa-molla non lineare<br />
non presenta risonanza. Si indichi con T il punto in cui un asse<br />
verticale risulta tangente ad una particolare curva A0 e con ωT<br />
la corrispondente frequenza. Facendo riferimento ad una molla<br />
dura, il punto di tangenza si posiziona sul ramo di curva al di<br />
sotto della parabola rappresentante le oscillazioni libere. Un asse<br />
verticale per ω < ωT interseca il ramo di curva superiore alla<br />
parabola e fornisce l’unica soluzione al problema oscillatorio. Per<br />
ω > ωT le soluzioni possibili sono invece rappresentate da tre<br />
intersezioni: la teoria non lineare prevede quindi l’esistenza di<br />
tre distinte ampiezze di risposta per una data intensità F0 della<br />
forza eccitatrice. Caratteristica del problema rimane comunque<br />
l’assenza di un valore di frequenza che faccia divergere l’ampiezza<br />
ad infinito.<br />
Per un sistema smorzato, l’equazione di Duffing assume la<br />
forma<br />
¨x+ω 2 x = ε[−2ζω ˙x−ω 2 (αx+βx 3 )+F0 cos Ωt] ε ≪ 1 , (3.11)<br />
in cui si è indicato con ζ il coefficiente di smorzamento.<br />
Seguendo la stessa procedura sfruttata per il sistema non smorza-<br />
to, si conclude che x1 è periodica se le seguenti condizioni sono
3.1 Oscillatore unidimensionale di Duffing 45<br />
soddisfatte:<br />
2ζA0 − F0<br />
ω 2 sin φ0 = 0 (α + 3<br />
4 βA2 0)A0 − F0<br />
ω 2 cos φ0 = 0 (3.12)<br />
Dalle relazioni (3.12) si ottiene la fase approssimata all’ordine zero<br />
con espressione<br />
φ0 = tan −1 2ζ<br />
α + 3<br />
4βA2 (3.13)<br />
0<br />
e quindi l’effetto dello smorzamento è quello di introdurre un ri-<br />
tardo della risposta rispetto all’eccitazione. Inoltre, facendo uso<br />
della definizione (3.9) nelle medesime relazioni, si trova<br />
[ω 2 0(1 + 3<br />
4εβA20) − ω 2 ] 2 + (2εζω 2 0) 2 2 εF0<br />
= , (3.14)<br />
che può essere sfruttata per tracciare |A0| in funzione di ω, come<br />
riportato in figura 3.3 per un oscillatore dotato di molla dura.<br />
In presenza di smorzamento viscoso, sebbene la curva di risposta<br />
sia continua, nel senso che non presenta più due rami separati,<br />
rimane la possibilità di discontinuità nella risposta. Partendo da<br />
basse frequenze, si osserva che al crescere di ω anche l’ampiezza<br />
Figura 3.3: Risposta in frequenza dell’oscillatore di Duffing smorzato.<br />
A0
3.2 Risonanze armoniche e subarmoniche 46<br />
|A0| subisce un incremento fin quando si raggiunge il punto 1 nel<br />
quale la tangente alla curva è infinita e l’ampiezza subisce un salto<br />
improvviso al punto 2 con successvo decremento. Se invece si parte<br />
da un valore sufficientemente alto di frequenza e si procede verso<br />
frequenze più basse, l’ampiezza aumenta fino al punto 3, dove la<br />
tangente è ancora infinita e si verifica un salto della risposta al<br />
punto 4 dove ha inizio una risposta decrescente. La porzione di<br />
curva tra i punti 1 e 3 si riferisce ad una risposta di tipo instabile,<br />
che non può manifestarsi nel sistema. Mentre il salto 3-4 può avere<br />
luogo anche se il sistema non è smorzato, il salto 1-2 è tipico di<br />
sistemi con smorzamento viscoso. La stessa fenomenologia nella<br />
risposta ha luogo anche con molle soffici, ma i salti nell’ampiezza<br />
avvengono con direzioni invertite.<br />
3.2 Risonanze armoniche e subarmoniche<br />
Quando un sistema lineare è eccitato da una forzante armoni-<br />
ca, la sua risposta è armonica con la stessa frequenza dell’ecci-<br />
tazione. Si è visto che se un sistema non lineare, come quello<br />
descritto dall’equazione di Duffing, risponde periodicamente ad<br />
una forzante armonica, allora la frequenza fondamentale della<br />
soluzione è uguale alla frequenza naturale del sistema lineariz-<br />
zato ed a questa dovrà inoltre essere uguale la frequenza di ecci-<br />
tazione. Bisogna osservare comunque, che caratteristica comune<br />
ai sistemi non lineari è quella di presentare risonanze armoniche e<br />
subarmoniche, ovvero di essere capaci di rispondere ad un segnale
3.2 Risonanze armoniche e subarmoniche 47<br />
monocromatico in ingresso con delle oscillazioni le cui frequenze<br />
sono rispettivamente multipli interi o frazionari della frequenza di<br />
pilotaggio.<br />
Una semplice giustificazione della nascita di frequenze armoni-<br />
che può essere fornita considerando lo sviluppo in serie della rispo-<br />
sta x in funzione della sollecitazione F0:<br />
x(t) = aF (t) + bF 2 (t) + cF 3 (t) + . . . . (3.15)<br />
Assumendo per F l’espressione sinusoidale F (t) = F0 sin Ωt, dalla<br />
precedente, arrestata al terzo ordine, si ottiene<br />
x(t) = aF0 sin Ωt + bF 2 0 sin 2 Ωt + cF 3 0 sin 3 Ωt = (3.16)<br />
= aF0 sin Ωt + 1<br />
2 bF 2 0 (1 − cos 2Ωt) + 1<br />
4 cF 3 0 (3 sin Ωt − sin 3Ωt)<br />
che mostra la comparsa di frequenze doppie, triple o superiori della<br />
frequenza in ingresso, a seconda dell’ordine della non linearità<br />
condiderata.<br />
Anche la modalità di generazione delle risonanze subarmoniche<br />
può essere illustrata ricorrendo allo sviluppo (3.15), arrestato per<br />
brevità al secondo ordine. Sostituendo una sollecitazione costitui-<br />
ta da due frequenze distinte, del tipo<br />
ne risulta una risposta<br />
F (t) = F01 cos Ω1t + F02 cos Ω2t (3.17)<br />
x(t) = aF01 cos Ω1t + aF02 cos Ω2t +<br />
+ bF01F02 cos[(Ω1 + Ω2)t] + bF01F02 cos[(Ω1 − Ω2)t] +<br />
+ 1<br />
2 bF 2 01 + 1<br />
2 bF 2 02 + 1<br />
2 bF 2 01 cos 2Ω1t + 1<br />
2 bF 2 02 cos 2Ω2t , (3.18)
3.2 Risonanze armoniche e subarmoniche 48<br />
che mostra in aggiunta alle usuali componenti oscillanti alle fre-<br />
quenze di ingresso, anche le seconde armoniche e le frequenze<br />
somma e differenza di Ω1 ed Ω2.<br />
Si consideri come esempio notevole di risonanza subarmonica,<br />
una particolare soluzione dell’equazione di Duffing (3.1). La pre-<br />
senza di un termine non lineare di terzo grado in x, suggerisce<br />
di ricercare una soluzione periodica con frequenza fondamentale<br />
ω = Ω/3. Il problema è ancora affrontabile col metodo perturbati-<br />
vo di cui al paragrafo precedente. Servendosi dello sviluppo (3.3)<br />
in cui si faccia uso della variabile temporale t, si trova il seguente<br />
sistema di equazioni da risolvere per sostituzioni successive:<br />
⎧<br />
¨x0 +<br />
⎪⎨<br />
⎪⎩<br />
<br />
Ω 2<br />
3<br />
x0 = F0 cos Ωt<br />
¨x1 + <br />
Ω 2<br />
3<br />
x1 = − <br />
Ω 2<br />
3 (αx0 + βx3 0)<br />
¨x2 + <br />
Ω 2<br />
3<br />
x2 = − <br />
Ω 2<br />
3 (αx1 + 3βx2 (3.19)<br />
0x1)<br />
. . . ;<br />
la soluzione del primo ordine è del tipo<br />
x0(t) = A0 cos Ω<br />
3<br />
9F0<br />
t − cos Ωt , (3.20)<br />
8Ω2 in cui la costante A0 va determinata dalle condizioni di periodicità<br />
da associare alla seconda equazione del sistema: si trova<br />
A0 = 1<br />
<br />
9F0 1 9F0<br />
± −7<br />
2 8Ω2 2 8Ω2 2 − 16<br />
1/2 α<br />
, (3.21)<br />
3 β<br />
la quale mostra che affinchè A0 sia una quantità reale, ovvero pos-<br />
sa esistere la subarmonica, i termini sotto radice devono essere<br />
maggiori o uguali a zero. Tale richiesta si traduce in una con-<br />
dizione da imporre alla frequenza della forzante, che, sfruttando
3.3 Onde in mezzi elastici non lineari 49<br />
la relazione (3.9) con ω = Ω/3, viene espressa dalla disuguaglianza<br />
Ω 2 <br />
≥ 9 ω 2 0 + 21<br />
16 εβ<br />
<br />
2<br />
3F0<br />
. (3.22)<br />
8Ω<br />
Si può concludere che l’oscillatore di Duffing privo di smorzamen-<br />
to ammette una soluzione rappresentata da una subarmonica di<br />
frequenza fondamentale Ω/3 solo se è soddisfatta la condizione<br />
(3.22).<br />
3.3 Onde in mezzi elastici non lineari<br />
Il problema può essere affrontato facendo riferimento all’energia<br />
elastica per unità di volume immagazzinata da un solido deforma-<br />
to, legata al tensore di deformazione Sij dall’espressione<br />
V = 1<br />
2 cijklSijSkl + 1<br />
3! cijklmnSijSklSmn + . . . , (3.23)<br />
con i, j, k, l, m, n = 1, 2, 3. Arrestando lo sviluppo al primo ter-<br />
mine, i coefficienti di proporzionalità sono rappresentati dalle co-<br />
stanti elastiche della teoria lineare. I contributi di ordine superi-<br />
ore vengono invece considerati attraverso costanti che, riferite ad<br />
esempio al terzo ordine, sono individuate da sei indici variabili da<br />
1 a 3, oppure da tre indici da 1 a 6 secondo la notazione (1.31).<br />
In campo non lineare, l’espressione (1.3) del tensore di defor-<br />
mazione va riscritta con l’aggiunta di un termine misto:<br />
Sik = 1<br />
<br />
∂ui<br />
+<br />
2 ∂xk<br />
∂uk<br />
+<br />
∂xi<br />
∂ul<br />
<br />
∂ul<br />
. (3.24)<br />
∂xi ∂xk<br />
La sostituzione di tale espressione nell’energia elastica (3.23) per-<br />
mette di passare alla variabile spostamento u. Si può quindi
3.3 Onde in mezzi elastici non lineari 50<br />
ricavare il tensore delle tensioni dal differenziale<br />
Tik =<br />
∂V<br />
, (3.25)<br />
∂(∂ui/∂xk)<br />
che, inserito nell’equazione del moto (2.1), fornisce l’equazione<br />
d’onda cercata.<br />
Limitandosi al semplice caso di propagazione di un’onda piana<br />
longitudinale in un solido approssimabile ad un corpo monodi-<br />
mensionale, gli sviluppi suddetti portano al risultato<br />
∂2u ∂t2 = ∂2u ∂x2 <br />
c11<br />
ρ + 3c11<br />
<br />
+ 2c111 ∂u<br />
ρ ∂x<br />
(3.26)<br />
dove sono stati omessi gli indici, essendovi un’unica componente<br />
di interesse nella propagazione.<br />
In generale nella propagazione non lineare, un’onda inizial-<br />
mente sinusoidale è soggetta a distorsione man mano che procede,<br />
dato che porzioni diverse del profilo dell’onda viaggiano a dif-<br />
ferenti velocità. Le più alte velocità si destano in corrispondenza<br />
dei punti del profilo interessati da forti deformazioni.<br />
La distorsione è anche giustificata dalla variazione delle ampiezze<br />
dei contributi spettrali che costituiscono l’onda. Durante la<br />
propagazione si verifica cioè una crescita delle intensità delle ar-<br />
moniche superiori, con un trasferimento continuo di energia dalla<br />
fondamentale ad esse. Si consideri in proposito un’onda inizial-<br />
mente sinusoidale di vettore d’onda k0 e frequenza ω; dopo un<br />
tragitto di lunghezza x l’espressione dell’onda è<br />
u = A cos(kx − ωt), con k nuovo vettore d’onda. Imponendo che<br />
questa sia soluzione dell’equazione (3.26), si determina la velocità
3.4 Modello analitico per la generazione di armoniche frazionali 51<br />
di propagazione<br />
Vf = ω<br />
k <br />
c11<br />
ρ<br />
<br />
<br />
3 c111<br />
1 + k0A + sin(k0x − ωt)<br />
2 c11<br />
visibilmente diversa dal semplice valore V0 = c11/ρ riferito al<br />
caso lineare. Di conseguenza, anche il vettore d’onda viene modi-<br />
ficato in<br />
k = ω<br />
Vf<br />
=<br />
V0<br />
<br />
3 1 + k0A 2<br />
ω<br />
+ c111<br />
c11<br />
<br />
.<br />
sin(k0x − ωt)<br />
Rimane infine da notare che nell’espressione della velocità di<br />
propagazione, da cui è possibile ottenere la relazione di disper-<br />
sione, compare la dipendenza dall’ampiezza della sollecitazione,<br />
caratteristica questa tipica dei sistemi non lineari.<br />
3.4 Modello analitico per la generazione di ar-<br />
moniche frazionali<br />
Scopo di questa sezione è quello di fornire gli strumenti teorici<br />
e analitici necessari alla comprensione del fenomeno della gener-<br />
azione di vibrazioni subarmoniche.<br />
Dopo un’introduzione all’equazione di Mathieu, si mostrerà<br />
come essa possa essere utilizzata a questo fine, partendo dal sem-<br />
plice caso di un oscillatore nonlineare, descritto come un punto<br />
massa forzato all’oscillazione in un pozzo quantico di potenziale<br />
cubico.
3.4 Modello analitico per la generazione di armoniche frazionali 52<br />
3.4.1 Equazione di Mathieu<br />
Va sotto il nome di equazione di Mathieu un’equazione differen-<br />
ziale del tipo:<br />
d2x + (α + β cos(t)) x = 0 (3.27)<br />
dt2 che descrive il moto di un oscillatore forzato, in cui è presente<br />
un termine elastico periodico, β cos(t), che si comporta come una<br />
sorgente di energia e prende il nome di eccitazione parametrica.<br />
Per alcuni valori dei parametri α e β le soluzioni delle equazione<br />
3.27 possono essere illimitate.<br />
tica<br />
Infatti, l’equazione di Mathieu, avrà una soluzione caratteris-<br />
x(t) = e ρ1t p1(t) + e ρ2t p2(t) (3.28)<br />
dove ρ1 e ρ2 sono costanti complesse e coniugate e p1(t) e p2(t) sono<br />
funzioni di t. Come riportato in [22] , gli esponenti caratteristici<br />
sono legati ai numeri caratterisitici µ1 e µ2 (e ρT = µ) attraverso il<br />
determinante dell’equazione, e sono dati da:<br />
µ1, µ2 = 1<br />
<br />
φ ±<br />
2<br />
(φ 2 <br />
− 4)<br />
(3.29)<br />
dove φ = φ(α, β) non è nota esplicitamente. Si possono comunque<br />
fare alcune osservazioni.<br />
1) φ > 2, i numeri caratterisitici sono numeri reali distinti e<br />
positivi, e uno di loro (ad esempio µ1) supera l’unità; i corrispon-
3.4 Modello analitico per la generazione di armoniche frazionali 53<br />
denti esponenti caratteristici sono reali del tipo: ρ1 = σ > 0,<br />
ρ2 = −σ < 0. La soluzione generale acquisisce la forma [22] :<br />
x(t) = c1e σ1t p1(t) + c2e σ2t p2(t) (3.30)<br />
dove c1, c2 sono costanti e p1(t), p2(t) sono funzioni periodiche di<br />
periodo 2π. Quindi i valori del piano α, β per cui cui φ(α, β) ><br />
2 corrispondono a soluzioni illimitate ed è chiamata regione dei<br />
parametri instabile.<br />
2) φ = 2, quindi µ1 = µ2 = 1 e ρ1 = ρ2 = 0, conseguentemente<br />
[22] è presente una sola soluzione di periodo 2π.<br />
3) −2 < φ < 2, i numeri caratteristici µ1, µ2 sono complessi<br />
coniugati con modulo unitario |µ1| = |µ2| = 1, quindi gli esponenti<br />
caratteristici diventano ρ1 = iν e ρ2 = −iν, con ν reale. La<br />
soluzione generale acquisisce la forma:<br />
x(t) = c1e iνt p1(t) + c2e −iνt p2(t) (3.31)<br />
tutte le soluzioni per cui −2 < φ < 2 sono, quindi, limitate, Ques-<br />
ta è la regione dei parametri α, β, detta stabile; le soluzioni sono<br />
oscillanti, ma non periodicamente (oltre al periodo 2π è presente<br />
la frequenza ν).<br />
4) φ = −2, quindi µ1 = µ2 = 1 (ρ1 = ρ2 = 1<br />
2i), c’è una<br />
soluzione periodica di periodo 4π per tutti i valori di α, β, per cui<br />
φ(α, β) = −2.<br />
5) φ < −2, quindi µ1, µ2 sono reali e negativi e µ1µ2 = 1:
3.4 Modello analitico per la generazione di armoniche frazionali 54<br />
1 σ+i<br />
x(t) = c1e 2t 1 −σ−i<br />
p1(t) + c2e 2t p2(t) (3.32)<br />
dove σ > 0 e p1(t) e p2(t) sono funzioni periodiche di periodo 2π,<br />
forma alternativa è la seguente:<br />
x(t) = c1e σt q1(t) + c2e −σt q2(t) (3.33)<br />
con q1(t), q2(t) sono funzioni periodiche di periodo 4π.<br />
E’ evidente che, nel piano dei parametri dell’equazione di Math-<br />
ieu, α e β, esistono due curve (φ(α, β) = ±2) che separano le re-<br />
gioni dei paramateri dove esistono soluzioni non limitate (|φ(α, β)| ><br />
2) dalle regioni dove tutte le tutte le soluzioni sono limitate (|φ(α, β)| <<br />
2).<br />
Queste funzioni corrispondono a soluzioni dell’equazione di Math-<br />
ieu perodiche di periodo 2π (e quindi frequenza 1) o 4π (e quindi<br />
frequenza 1/2). Queste curve φ(α, β) = ±2 sono dette curve di<br />
transizione.<br />
Le soluzioni di periodo 2π possono essere trovate a partire dallo<br />
sviluppo in serie di Fourier complesse di x(t):<br />
x(t) =<br />
+∞<br />
n=−∞<br />
cne int<br />
sostituendo nell’equazione di Mathieu si ottiene:<br />
x(t) =<br />
+∞<br />
n=−∞<br />
(3.34)<br />
1<br />
2 βcn+1 + (α − n 2 )cn + 1<br />
2 βcn−1 e int = 0 (3.35)
3.4 Modello analitico per la generazione di armoniche frazionali 55<br />
per ogni valore di t. La 3.35 potrà essere soddisfatta solo se tutti<br />
i coefficienti sono nulli:<br />
1<br />
2 βcn+1 + (α − n 2 )cn + 1<br />
2 βcn−1 = 0 n = 0, ±1, ±2, ...<br />
(3.36)<br />
Questo insieme infinito di equazioni omogenee in cn ha soluzioni<br />
non banali se e solo se il determinante, di dimensioni infinite, dei<br />
coefficienti è nullo, per α = n 2<br />
<br />
<br />
<br />
<br />
. . . . . . <br />
<br />
<br />
<br />
<br />
. γ1 1 γ1 0 0 <br />
<br />
<br />
<br />
= 0 (3.37)<br />
<br />
<br />
. 0 γ0 1 γ0 0 <br />
<br />
<br />
<br />
. 0 0 γ1 1 γ1 <br />
dove γn = β/2(α − n 2 ) con n = 0, 1, 2, .... Questo corrisponde a<br />
φ(α, β) = 0e definisce le curve di transizione sul piano α, β.<br />
Analogamente per le soluzione periodiche 4π partendo dalla<br />
serie di Fourier:<br />
x(t) =<br />
+∞<br />
n=−∞<br />
1 i<br />
dne 2nt si ricava immediatamente il determinante dei coefficienti:<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
γ2 1 γ2 0 0 0<br />
0 γ1 1 γ1 0 0<br />
0 0 γ1 1 γ1 0<br />
0 0 0 γ2 1 γ2<br />
(3.38)<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
= 0 (3.39)
3.4 Modello analitico per la generazione di armoniche frazionali 56<br />
dove γ1 = β/2(α−1/41 2 ), γ2 = β/2(α−1/43 2 ) con α = 1/4(2m+<br />
1) 2 , per ogni valore di m, che corrisponde alle curve di transizione<br />
per le soluzioni periodiche di periodo 4π.<br />
Calcolo delle curve di transizione con il metodo perturbativo<br />
Per piccoli valori di β si può adottare il metodo perturbativo<br />
per stabilire le curve di transizione per il cosidetto diagramma di<br />
stabilità delle soluzioni delle equazione di Mathieu.<br />
sia<br />
Nell’equazione<br />
con corrispondente soluzione:<br />
¨x + (α + β cos(t)) x = 0 (3.40)<br />
α = α(β) = α0 + βα1 + ... (3.41)<br />
x(t) = x0(t) + βx1(t) + ... (3.42)<br />
dove le funzioni xn (n = 0, 1, ...) hanno periodo 2π o 4π.<br />
Sostituendo le 3.41 e 3.42 nella 3.40 si ricava:<br />
¨x0 + α0x0 = 0 (3.43)<br />
¨x1 + α0x = −(α1 cos(t))x0<br />
¨x2 + α0x2 = −x0α2 − (α1 + cos(t))x1<br />
(3.44)<br />
(3.45)
3.4 Modello analitico per la generazione di armoniche frazionali 57<br />
la 3.43 ha periodo minimo di 2π per α0 = n 2 e un periodo massimo<br />
di 4π se α0 = (n + 2) 2 , condizione che può essere unificata con:<br />
3.44<br />
α0 = 1<br />
4 n2<br />
n = 0, 1, ... (3.46)<br />
1) per n = 0 la 3.43 ha soluzione periodica x0(t) = a0, dalla<br />
d 2 x1<br />
dt 2 = −(α1 + cos(t))α0 (3.47)<br />
che ha soluzione periodica solo se α1 = 0, che è della forma:<br />
Mentre la 3.45 diventa:<br />
x1 = a0 cos(t) + a1<br />
(3.48)<br />
d 2 x2<br />
dt 2 = −a0α2 − 1<br />
2 a0 − 1<br />
2 a0 cos(2t) − a1 cos(t) (3.49)<br />
che ha soluzione periodica (di periodo 2π) solo se: a0α+1/2α0 = 0<br />
o se α2 = −1/2, quindi per piccoli valori di β:<br />
2) per n = 1 si α0 = 1/4 e<br />
la 3.44 diventa:<br />
α = − 1<br />
2 β2 + O(β 3 ) (3.50)<br />
<br />
1<br />
x0(t) = a0 cos<br />
2 t<br />
<br />
1<br />
+ b0 sin<br />
2 t<br />
<br />
(3.51)
3.4 Modello analitico per la generazione di armoniche frazionali 58<br />
−b0<br />
<br />
d2x1 1<br />
+<br />
dt2 4 x1<br />
<br />
= −a0 α1 − 1<br />
<br />
1<br />
cos<br />
2 2 t<br />
<br />
−<br />
α1 − 1<br />
<br />
1<br />
sin<br />
2 2 t<br />
<br />
− 1<br />
2 a0<br />
<br />
3<br />
cos<br />
2 t<br />
<br />
− 1<br />
2 b0<br />
<br />
3<br />
sin<br />
2 t<br />
<br />
(3.52)<br />
Ci sono soluzioni periodiche (di periodo 4π) solo se b0 = 0,<br />
α1 = −1/2 o se a0 = 0, α1 = 1/2. Per piccoli β:<br />
α = 1<br />
4<br />
1<br />
± β (3.53)<br />
2<br />
descriva la curva di transizione prossima al punto (α = 1/4, β = 0)<br />
del piano dei parametri.<br />
Equazione di Mathieu con smorzamento<br />
Si consideri l’equazioni opportunamente modificata con la pre-<br />
senza dello smorzamento:<br />
dove ν > 0, κ > 0, scrivendo:<br />
si ottiene nella 3.54<br />
d2x + κdx + (ν + β cos(t)) x = 0 (3.54)<br />
dt2 dt<br />
1 −<br />
x(t) = e 2κt η(t) (3.55)<br />
d2 <br />
η<br />
+ ν −<br />
dt2 1<br />
4 κ2 <br />
+ β cos(t) η = 0 (3.56)<br />
che si riconduce all’equazione di Mathieu imponendo:<br />
α = ν − 1<br />
4 κ2<br />
(3.57)
3.4 Modello analitico per la generazione di armoniche frazionali 59<br />
Quando α e β sono tali per cui le soluzioni di 3.56 sono limi-<br />
tate, anche le soluzioni di 3.54, per 3.55 sono limitate. Inoltre è<br />
consentito un margine di crescita esponenziale di η, pur rimanen-<br />
do limitate le soluzioni x(t). Quindi, le regioni di stabilità delle<br />
soluzioni dell’equazione 3.54 sono un’estensione delle regioni di<br />
stabilità dell’equazione di Mathieu, senza smorzamento.<br />
La prima regione di instabilità, per la 3.56, si verifica essere<br />
vicino a α = 1/4 (ν = 1/4(1 + κ 2 )), dalla sezione precedente è<br />
noto che sulle curve che limitano tale regione si ha una soluzione<br />
periodica di periodo 4π. Corrisponde, quindi, a φ = −2, dentro<br />
la regione si ha, quindi, φ < −2. Quindi, dalla 3.55, x(t) prende<br />
la forma:<br />
1<br />
(σ−<br />
x(t) = c1e 2iκ) 1<br />
(−σ−<br />
q1(t) + c2e 2iκ) q2(t) (3.58)<br />
con σ > 0 e q1(t), q2(t) di periodo 4π. Applicando il metodo<br />
perturbativo [22] si ricava la regione di stabilità:<br />
<br />
ν − 1<br />
2 −<br />
4<br />
1<br />
4 β2 1 − κ 2 > 0 (3.59)<br />
3.4.2 Soglia della fondamentale per la generazione della<br />
subarmonica di ordine 1/2<br />
Si consideri un semplice oscillatore nonlineare forzato alla vi-<br />
brazione in un pozzo di potenziale cubico [22] , che soddisfi la<br />
seguente equazione:
3.4 Modello analitico per la generazione di armoniche frazionali 60<br />
d2x + adx + bx(1 + cx) = F cos(ωt) (3.60)<br />
dt2 dt<br />
dove a, b, c e F sono costanti che descrivono rispettivamente:<br />
smorzamento, costante elastica, costante non lineare, ampiezza<br />
del pilotaggio.<br />
La presenza del termine quadratico dovuta alla non linearità,<br />
fa sì che si generino armoniche di ordine 2, cioè a frequenza pari<br />
a 2ω, nell’ipotesi più che probabile che si verifichi la presenza di<br />
una perturbazione a ω/2 (è sufficiente un solo fotone), a seguito<br />
dell’interazione con la componente fondamentale a ω, vengono<br />
generate componenti a ω, 2ω, 3/2ω e a ω/2. Quest’ultimo termine<br />
è proprio quello di interesse nel presente studio, la subarmonica<br />
frazionale di ordine 1/2.<br />
Inoltre, se accade che il termine a 1/2ω così generato, risul-<br />
ta in quantità maggiore di quello di perturbazione, si verifica<br />
una retroazione positiva, causando la generazione stabile e con-<br />
sistente della componente a 1/2ω. Proprio il valore del termine<br />
a 1/2ω che deve essere raggiunto dall’interazione costituisce la<br />
soglia per la generazione di subarmoniche frazionali. Risulta an-<br />
che che il pilotaggio a omega è in prossimità della risonanza del<br />
sistema vibrante, le probabilità per cui venga generato la subar-<br />
monica frazionale aumentano, aumentando l’energia di vibrazione<br />
che viene a trovarsi nel sistema.<br />
Tornando all’equazione 3.60 e considerando un termine di per-<br />
turbazione piccolo ξ = x − x ′ dove:
3.4 Modello analitico per la generazione di armoniche frazionali 61<br />
è la soluzione dell’equazione lineare:<br />
x ′ = U cos(ωt + φ) (3.61)<br />
d2x ′<br />
+ adx′<br />
dt2 dt + bx′ = F cos(ωt) (3.62)<br />
dove U = F [(ω 2 − ω 2 0) 2 + a 2 ω 2 ] −1/2 e φ = tan −1 [aω/(ω 2 − ω 2 0)]<br />
sono rispettivamente l’ampiezza e la fase della componente fonda-<br />
mentale e ω0 = b 1/2 . L’equazione 3.60 diventa, attraverso semplici<br />
sostituzioni:<br />
d2ξ + adξ<br />
dt2 dt + ξb(1 + 2cx′ ) + bcξ 2 + bcx ′2 = 0 (3.63)<br />
In questa equazione il penultimo termine può essere trascurato<br />
perché del secondo ordine rispetto a ξ, mentre l’ultimo termine<br />
può essere trascurato nello studio delle generazione delle subar-<br />
moniche ω/2, dato che x ′2 contiene solo il termine di ordine zero<br />
e la seconda armonica (2ω), non di interesse per l’attuale studio.<br />
Così, sostituendo nella equazione 3.63 l’espressione 3.61 per x ′ ,<br />
si ottiene l’equazione di Mathieu:<br />
d2ξ + adξ<br />
dt2 dt<br />
+ ξb(1 + 2cU cos(ωt + φ)) = 0 (3.64)<br />
come mostrato in [22] e nella sezione precedente, l’equazione<br />
3.64 può essere risolta da oscillazioni alle frequenza armoniche<br />
frazionali della frequenza circolare di eccitazione ω, nel caso in cui<br />
opportune condizioni siano verficate dai paramteri a, b e c. La
3.4 Modello analitico per la generazione di armoniche frazionali 62<br />
soglia di oscillazione della componente fondamentale Uth, per la<br />
frequenza dell’oscillazione della subarmonica di ordine 1/2, può<br />
essere facilmente calcolata risolvendo ricorsivamente l’equazione<br />
3.64 alla frequenza ω/2, cercando l’effetto di amplificazione.<br />
Si trova così [19]<br />
Uth = 1<br />
<br />
∆ω′4 ∆ω′3<br />
+<br />
c 16 2 +<br />
<br />
1 + a′2<br />
<br />
∆ω<br />
4<br />
′2 + a ′2 ∆ω ′ + a ′2<br />
1/2 (3.65)<br />
dove a ′ = a/ω0 e ∆ω ′ = (ω − 2ω0)/ω0. Nel caso in cui sia a = 0,<br />
condizione che si verifica per sistemi non dissipativi, si ricava un<br />
valore nullo per l’ampiezza di soglia che deve avere l’ampiezza di<br />
eccitazione, in corrispondenza della frequenza di pilotaggio ω =<br />
2ω0. Per valori di ω sufficientemente vicini a 2ω0, e per valori della<br />
dissipazione sufficientemente piccoli, si ricava dalla 3.65<br />
Uth = 1 ′2 ′2<br />
a + ∆ω<br />
c<br />
1/2 (3.66)<br />
che mostra un andamento parabolico rispetto a ∆ω ′ intorno al<br />
valore minimo a ′ /c a ∆ω ′ = 0: un massimo di efficienza nella<br />
generazione della subarmonica si trova per una frequenza di pi-<br />
lotaggio che sia due volte la frequenza circolare propria del sistema<br />
oscillante ω0.<br />
Nel caso qui descritto, comunque, dove devono essere consider-<br />
ate onde e non oscillatori, non c’è un valore massimo. In realtà,<br />
non ci sono forze di richiamo, vere e proprie, agenti sulle singole<br />
masse oscillanti, come il terzo termine nell’equazione 3.60; piut-
3.4 Modello analitico per la generazione di armoniche frazionali 63<br />
tosto, ciascun elemento della struttura vibrante è pilotato verso<br />
la sua posizione di equilibrio (x = 0) dalla stessa configurazione<br />
della deformazione dell’elemento adiacente, come nel caso in cui<br />
si consideri una equazione d’onda nella generica variabile z:<br />
∂2z ∂z<br />
+ γ<br />
dt2 dt<br />
+ κ<br />
ρ<br />
∂ 2 z<br />
= 0 (3.67)<br />
∂x2 dove κ è il valore proprio della costante elastica, γ è il termine<br />
di viscosità, ρ è la densità di massa del mezzo in cui avviene<br />
la propagazione. Quindi non si presenta nessuna frequenza di<br />
risonanza da considerare ω0 per le masse oscillanti; piuttosto, è<br />
la frequenza d’onda stessa che deve essere considerata come fre-<br />
quenza di risonanza locale. Conseguentemente la frequenza del<br />
modo risonante Ω0, all’interno della struttura, non ha influenza<br />
nella definizione della forza di richiamo. La frequenza del mo-<br />
do risonante risulta direttamente limitata alla frequenza di oscil-<br />
lazione, quindi la ”frequenza di risonanza locale” è la la frequenza<br />
di propagazione stessa, e nella 3.65 si deve porre ω = ω0, in tal<br />
modo sarà ∆ω ′ = −1.<br />
Il valore di soglia deve quindi essere calcolato dalla equazione<br />
3.65 e si riduce a [19]<br />
Uth = 1<br />
′2 a<br />
c 4<br />
1<br />
2 9<br />
+<br />
16<br />
(3.68)<br />
che è costante rispetto alla frequenza, nella zona dell’iperbole cor-<br />
rispondente ai valori misurati e mostrati nella sezione successiva.
Capitolo 4<br />
Risultati Sperimentali<br />
4.1 Strumentazione<br />
In questa sezione viene descritta la strumentazione utilizzata<br />
nelle misure sperimentali effettuate al fine di studiare il compor-<br />
tamento anarmonico di risonatori piezoelettrici ceramici di forma<br />
cilindrica circolare cava. Questi ultimi sono stati analizzati per<br />
quanto concerne la risposta in frequenza e il campo degli sposta-<br />
menti superficiali in regime di vibrazione non lineare. L’inter-<br />
esse è qui rivolto alle caratteristiche ed alle qualità metrologiche<br />
degli strumenti, fornendo alcune informazioni riguardo alle tec-<br />
niche sfruttate nei rilievi sperimentali. I risultati ottenuti sono<br />
invece riportati nel successivo capitolo.<br />
4.1.1 Descrizione della strumentazione<br />
Di seguito viene presentata la strumentazione impiegata, sud-<br />
dividendola in base alla tipologia di misura effettuata.
4.1 Strumentazione 65<br />
C0<br />
R L C<br />
Figura 4.1: Circuito equivalente di un elemento piezoelettrico.<br />
Misure di ammettenza<br />
L’identificazione dei modi propri di oscillazione di campioni<br />
piezoelettrici può essere effettuata analizzando il comportamento<br />
elettrico del sistema, che a tutti gli effetti costituisce un circuito<br />
dotato di propria resistenza, induttanza e capacità.<br />
I risonatori piezoelettrici, vibranti nella vicinanza di un modo<br />
proprio, possono essere rappresentati elettricamente da una serie<br />
RLC in parallelo con una capacità fissata C0 (Figura 4.1). Si riesce<br />
cioè a stabilire [3]<br />
un’analogia elettromeccanica tra il risonatore piezolettrico ed<br />
un circuito elettrico le cui costanti resistive, induttive e capacitive<br />
sono, nell’ordine, equivalenti alle grandezze meccaniche smorza-<br />
mento, massa ed elasticità. Si utilizza inoltre la capacità C0 per<br />
tener conto degli effetti dovuti agli elettrodi sulla superficie del<br />
piezoelettrico.<br />
La risposta in frequenza delle strutture piezoelettriche può pre-<br />
sentare caratteristiche imprevedibili dal punto di vista teorico, ed<br />
un calcolo analitico delle risonanze è spesso laborioso ([15]). La<br />
stessa indagine compiuta tramite il circuito equivalente è il più<br />
delle volte applicabile solo per la prima frequenza fondamentale
4.1 Strumentazione 66<br />
del sistema e restituisce risultati attendibili se gli altri modi sono<br />
sufficientemente distanti nello spettro.<br />
Diventa fondamentale ricorrere alla verifica sperimentale. In<br />
particolare, è stato utilizzato un’analizzatore HP4194A funzio-<br />
nante nella modalità di analizzatore di ammettenza (o impeden-<br />
za).<br />
Indicata con Z = R + jX (Ω) l’impedenza di un circuito elet-<br />
trico costituito da una resistenza R in serie a una reattanza X =<br />
ωL − 1/ωC, si chiama ammettenza l’inverso di Z<br />
Y = G − jB (Ω −1 ≡ S) , (4.1)<br />
in cui G = R/|Z| 2 è la conduttanza e B = X/|Z| 2 la suscettanza.<br />
Se V = V0e jωt è la tensione applicata ai capi del circuito, ne nasce<br />
una corrente I = V/Z = V Y = V0(G − jB)e jωt sfasata rispetto<br />
a V di ϕ = arctan X/R = arctan B/G e con ampiezza massima<br />
I0 = V0/|Z| = V0|Y |.<br />
L’analizzatore suddetto compie una misura indiretta dell’am-<br />
mettenza elettrica del provino piezoelettrico collegato allo stru-<br />
mento tramite un opportuno banco elettrico (HP45951A), i cui<br />
terminali possono fornire una tensione selezionabile dall’opera-<br />
tore. Si tratta cioè di un impedenzimetro in grado di eseguire una<br />
spazzolata in frequenza (sweep) nell’intervallo desiderato. I modi<br />
propri della struttura sono indicati da un picco nell’ammetten-<br />
za, in corrispondenza del quale lo strumento registra un massimo<br />
(locale) nella corrente che attraversa la struttura analizzata.<br />
Si riportano il campo di variabilità dei parametri impostabili
4.1 Strumentazione 67<br />
dall’operatore ed alcune specifiche dell’analizzatore HP4195A.<br />
⋄ Campo di frequenze 10 5 ÷5·10 11 Hz<br />
⋄ Campo di tensione ±40 V<br />
⋄ Campo di impedenza 30·10 −3 ÷ 30 · 10 3 Ω<br />
⋄ Risoluzione 10 mV<br />
⋄ Accuratezza ±(0.12%+12 mV)<br />
⋄ Impedenza di uscita 50 Ω<br />
Rilevamento del campo di spostamento dei punti della superficie della<br />
struttura vibrante<br />
La figura 4.2 riporta lo schema a blocchi della strumentazione<br />
adottata per misurare lo spostamento normale della superficie<br />
esterna di un campione piezoelettrico di forma tubolare. Gli stru-<br />
menti di cui si è fatto uso e le specifiche ad essi relative sono<br />
elencate di seguito:<br />
(a) Generatore di funzione HP3324A<br />
⋄ Campo di frequenze 10 −3 ÷ 210 · 10 15 Hz<br />
⋄ Risoluzione in frequenza 10 −3 Hz fino a 10 6 Hz<br />
⋄ Accuratezza in frequenza ±5 ppm del valore selezionato<br />
⋄ Campo di ampiezze 10 −3 ÷ 10 V (p-p)<br />
⋄ Risoluzione in ampiezza 4 digit<br />
⋄ Accuratezza in ampiezza ±0.2 dB tra +23.98÷-56.02<br />
dBm con 10 −3 ÷ 100 · 10 3 Hz<br />
⋄ Impedenza di uscita 50±1 Ω tra 0÷10 · 10 3 Hz
4.1 Strumentazione 68<br />
(b) Amplificatore di potenza ENI 240L<br />
⋄ Campo di frequenze 20·10 3 ÷ 10 · 10 9 Hz<br />
⋄ Guadagno 50 dB fisso<br />
⋄ Uscita lineare 40 W<br />
⋄ Distorsione armonica >28 dB sotto la<br />
⋄ Impedenza ingresso/uscita 50 Ω<br />
fondamentale a 40 W<br />
(c)-(d) Interferometro ottico Polytec OFV 353 con proces-<br />
sore di segnale Polytec OFV 2700<br />
⋄ Campo di misura ±75 · 10 −9 m<br />
⋄ Sensibilità 50·10 −9 m/V con carico di 50 Ω<br />
25·10 −9 m/V con carico >50 Ω<br />
⋄ Rapidità per un segnale a gradino in ingresso:<br />
−tempo di ritardo 100·10 −9 s<br />
−tempo di salita 25·10 −9 s<br />
−tempo di discesa 25·10 −9 s<br />
−sovraelongazione 10%<br />
(e) Lock-in EGεG INSTRUMENT 7220<br />
CANALE DEL SEGNALE (tensione in ingresso)<br />
⋄ Tensione 2·10 −9 ÷ 1 V<br />
⋄ Impedenza 100·10 9 Ω, 25·10 −12 F<br />
⋄ Riserva dinamica da 0 a 100 dB
4.1 Strumentazione 69<br />
CANALE DI RIFERIMENTO<br />
⋄ Campo di frequenze 0.5÷120 · 10 3 Hz<br />
⋄ Trigger seno (200·10 −3 V p-p)<br />
⋄ Impedenza 10 9 Ω, 25·10 −12<br />
⋄ Risoluzione di fase 0.001 gradi<br />
(f) Oscilloscopio TEKTRONIX TDS 340A<br />
⋄ Banda passante 100·10 9 Hz<br />
⋄ Freq. di campionamento 500·10 9 campioni/s<br />
⋄ Interv. temp. a divisione 5·10 −9 ÷ 5 s/div<br />
⋄ Accuratezza temporale ±(100 ppm ×Lett.+0.4·10 −9 ) s<br />
⋄ Interv. in amp. a div. (2 ÷ 10)·10 −3 V/div<br />
⋄ Accuratezza in amp. ±(3 mV+0.1 div×V/div),<br />
tra 100 mV/div e 1 V/div<br />
⋄ Impedenza di ingresso 10 9 Ω, 20·10 −12 F (parallelo)<br />
(g) Analizzatore di spettro HP4195A<br />
⋄ Campo di frequenze 10÷500 · 10 9 Hz<br />
⋄ Accuratezza in frequenza ±20 ppm<br />
⋄ Impedenza di ingresso 50 Ω<br />
⋄ Attenuazione 0÷50 dB a passi da 10 dB<br />
⋄ Campo di ampiezze -135÷20 dBm<br />
⋄ Accuratezza in ampiezza ±1.0 dB a 50·10 9 Hz<br />
Come si evince dallo schema, il segnale inviato al tubo piezoelet-<br />
trico è fornito dal generatore di segnale (a) e
4.1 Strumentazione 70<br />
Figura 4.2: Schema a blocchi rappresentante la strumentazione impiegata nella<br />
misura dello spostamento radiale dei punti della superficie esterna dei provini.
4.1 Strumentazione 71<br />
amplificato dall’amplificatore di potenza (b) a guadagno fisso<br />
di 50 dB. Tale amplificatore, oltre a consentire l’applicazione di<br />
potenze opportune al raggiungimento di un regime di vibrazione<br />
non lineare, svolge la funzione di adattare elettricamente l’impe-<br />
denza del provino piezoelettrico a quella del generatore di segnale.<br />
A fronte dei 50 Ω in uscita dal generatore, si possono avere<br />
valori di impedenza delle ceramiche dell’ordine dell’unità in cor-<br />
rispondenza alle risonanze. In assenza del blocco di amplificazione,<br />
il segnale inviato dal generatore sarebbe quasi interamente riflesso,<br />
consentendo un minimo trasferimento di potenza al provino e dan-<br />
neggiando il generatore stesso. Lavorando, inoltre, con impedenze<br />
così piccole, per raggiungere tensioni che portino la ceramica in<br />
regime non lineare bisognerebbe ricorrere all’applicazione di cor-<br />
renti superiori alle possibilità del generatore. L’impiego dell’am-<br />
plificatore (b) ha permesso quindi di disporre di un guadagno atto<br />
a raggiungere le potenze richieste e di risolvere i suddetti problemi<br />
di adattamento elettrico.<br />
Il rilevamento dello spostamento della superficie del tubo<br />
avviene impiegando un metodo acusto-ottico. L’interferometro (c)<br />
emette un fascio laser che incide ed è riflesso sulla superficie del<br />
provino; il segnale di ritorno dalla superficie viene quindi elaborato<br />
dal processore (d), secondo quanto riportato al paragrafo 4.1.1.<br />
È stata effettuata una scansione della superficie tenendo fisso<br />
lo spot del laser e muovendo il campione. Il tubo è stato poggiato<br />
di base in posizione verticale su un goniometro con il quale è stato
4.1 Strumentazione 72<br />
ruotato intorno al suo asse di simmetria; in questo modo si è ot-<br />
tenuta la scansione lungo una circonferenza. Per gli spostamenti<br />
lungo l’asse si sono sfruttate guide micrometriche centesimali, con<br />
cui si è ottenuta la traslazione del goniometro, e quindi del cilin-<br />
dro, in direzione verticale: ne è risultata la scansione lungo una<br />
direttrice del tubo.<br />
Il segnale processato in (d) è inviato nel lock-in (e), strumento<br />
su cui si leggono i valori dell’ampiezza e della fase dello spostamen-<br />
to. Il valore della fase è riferito al segnale emesso dal generatore,<br />
per cui è necessario il collegamento diretto dei blocchi (a) ed (e).<br />
Tramite l’analizzatore di spettro (h), si può invece ottenere<br />
l’informazione in frequenza del segnale processato. Lo spettro<br />
ottenuto, oltre a fornire le frequenze e le intensità delle diverse<br />
componenti presenti nel segnale, è anche indicativo dell’eventuale<br />
rumore di fondo presente nella misura. Nel caso in cui si faccia uso<br />
del lock-in (e), la presenza di rumore può essere invece evidenziata<br />
monitorando con l’oscilloscopio (f) il segnale ricevuto in (e).<br />
Principi di funzionamento dell’interferometro acusto-ottico<br />
Il sensore ottico di vibrazioni utilizza una tecnica di misura<br />
interferometrica. L’interferometria ottica consente la misura di<br />
spostamenti molto più piccoli della lunghezza d’onda della luce,<br />
sfruttando una relazione sinusoidale tra il segnale d’uscita<br />
dell’interferometro e la differenza dei cammini ottici percorsi da<br />
due raggi laser generati dalla stessa sorgente. Come sarà mostra-
4.1 Strumentazione 73<br />
ωL<br />
Sorgente<br />
laser<br />
(A)<br />
(2) (D)<br />
(1)<br />
Al processore di segnale<br />
(B) (C)<br />
(F)<br />
(E)<br />
Lente<br />
Figura 4.3: Interferometro acusto-ottico.<br />
d = d0 cos ωt<br />
to, l’intensità risultante dopo la ricombinazione dei raggi varia in<br />
maniera sinusoidale con la differenza di fase relativa. Tale dif-<br />
ferenza di fase è generata dallo spostamento della superficie in<br />
vibrazione che modula la lunghezza del percorso compiuto da uno<br />
dei due raggi.<br />
Un dispositivo che realizza il processo descritto, è l’interfero-<br />
metro Mach-Zehnder schematizzato in figura 4.3. La luce polar-<br />
izzata orizzontalmente e proveniente dalla sorgente laser di fre-<br />
quenza angolare ωL è ripartita in due raggi di uguale intensità da<br />
un divisore di fascio (A). Il primo (1) attraversa la cella di Bragg<br />
(B), che sposta la pulsazione ad un valore ωL + ωB (dove ωB = 70<br />
MHz), passa nel prisma (C) (polarizzato orizzontalmente) senza<br />
subire modifiche e arriva alla lamina ottica (E) di spessore λ/8,<br />
che ruota il piano di polarizzazione del raggio incidente sul divi-<br />
sore (C) di π/2. Una lente convergente lo focalizza sulla superficie<br />
in vibrazione. Il raggio riflesso torna quindi sulla lamina (E), dove
4.1 Strumentazione 74<br />
subisce un’ulteriore rotazione di π/2 del piano di polarizzazione 1<br />
(risultando, quindi, un percorso ottico totale pari a λ/4) prima<br />
di incidere sul prisma (C) dove si ricombina con il secondo rag-<br />
gio (2) 2 , che ha invece compiuto il suo cammino nel prisma (D)<br />
senza essere alterato. I raggi ricombinati vengono mandati ad un<br />
fotodiodo (F), che fornisce una corrente in uscita proporzionale<br />
all’intensità luminosa che lo colpisce.<br />
Al fine di valutare lo sfasamento introdotto dalla superficie<br />
in vibrazione, è necessario effettuare un confronto fra la fase del<br />
primo fascio e quella del secondo fascio, che ha subito una vari-<br />
azione dovuta proprio alla vibrazione. E’ necessario partire dal<br />
campo elettrico uscente dalla sorgente laser e considerare tutte le<br />
componenti di fase introdotte dal cammino ottico che compie:<br />
la cui intensità è:<br />
E = E0e iωLt<br />
I = E 2 = E · E ∗<br />
(4.2)<br />
(4.3)<br />
avendo indicato con E ∗ il complesso coniugato del campo elettrico<br />
E.<br />
Il campo elettrico del primo fascio, quando incide sul fotodiodo<br />
(F) è diventato:<br />
1 Le due rotazioni di π/2 hanno lo scopo di invertire la polarizzazione del raggio (1).<br />
2 Questo è possibile perchè (C) è un polarizzatore, altrimenti il fascio di ritorno dal<br />
campione lo attraverserebbe.
4.1 Strumentazione 75<br />
E1 = 1 iωLt<br />
E0e<br />
2<br />
dove il fattore 1/2 è dovuto al divisore di fascio (A).<br />
(4.4)<br />
Mentre il campo elettrico del secondo, fascio quello riflesso dalla<br />
superficie in vibrazione, quando incide sul fotodiodo (F) è espresso<br />
da:<br />
E2 = 1 i[(ωL+ωB)t+φ(t)]<br />
E0e<br />
2<br />
(4.5)<br />
dove il fattore 1/2 è dovuto al divisore di fascio (A), ωB è la<br />
pulsazione introdotta dalla cella di Bragg, che si comporta come<br />
in modulatore di frequenza, e φ(t) è la fase, variabile nel tempo,<br />
prodotta dallo spostamento superficiale.<br />
Sul fotodiodo (F) arriva, quindi, un campo totale:<br />
ET OT = E1 + E2<br />
(4.6)<br />
Dato che il fotodiodo (F) non risponde al campo elettrico,<br />
ma alla sua intentensità I, data dall’equazione 4.3, è necessario<br />
calcolarla:<br />
IT OT = (E1 + E2) · (E1 + E2) ∗<br />
che, sostituendo le equazione 4.4 e 4.5, diventa:<br />
da cui<br />
IT OT = 1<br />
4 E2 <br />
0 2 + 2 ei(ωBt+φ(t)) <br />
−i(ωBt+φ(t))<br />
+ e<br />
2<br />
(4.7)<br />
(4.8)
4.1 Strumentazione 76<br />
IT OT = 1<br />
2 E2 0[1 + cos(ωBt + φ(t))] (4.9)<br />
tale intensità di campo, una volta fatto passare il fascio risultante<br />
attraverso un filtro passa alto diventa:<br />
IT OT = 1<br />
2 E2 0 cos(ωBt + φ(t)) (4.10)<br />
tale fascio risultante viene ulteriormente processato moltiplican-<br />
dolo per la corrente di pilotaggio della cella di Bragg (I0 cos(ωBt+<br />
φ(t))), ottenendo:<br />
IT OT = α cos(ωBt + φ(t)) + β cos(φ(t)) (4.11)<br />
dove α e β sono costanti dipendenti da E0 e I0.<br />
Infine, il fascio risultante viene filtrato attraverso un passabas-<br />
so, ottenendo un’intensità legata alla variazione di fase introdotta<br />
dalla vibrazione sulla superficie su cui incide il fascio iniziale:<br />
IT OT = β cos[φ(t)] (4.12)<br />
Tutto ciò evidenzia come la funzione della cella di Bragg sia<br />
quella di rendere il segnale d’uscita sensibile a spostamenti della<br />
superficie in un verso o nell’altro. Infatti, senza la frequenza ωB,<br />
il segnale di uscita sarebbe quello fornito dall’equazione (4.12),<br />
dipendente tramite la funzione coseno alla fase ϕ(t): fasi uguali e<br />
di segno opposto quindi, avrebbero prodotto la stessa corrente di<br />
uscita.
4.2 Risultati sperimentali e confronto con i risultati teorici 77<br />
Figura 4.4: Tubi piezoelettrici.<br />
4.2 Risultati sperimentali e confronto con i risul-<br />
tati teorici<br />
4.2.1 I campioni piezoelettrici<br />
Le misure sono state effettuate su campioni di geometria cilin-<br />
drica a sezione circolare cava e su campioni a geometria di lastra<br />
sottile a sezione rettangolare (piastrine). Il materiale di cui sono<br />
costituiti è ceramica piezoelettrica in titanato zirconato di piombo<br />
di tipo Navy type III, anche indicato con la sigla PZT-8. La figura<br />
4.4 riporta un’immagine di tipici tubi piezoeletrrici.<br />
Le caratteristiche geometriche dei due campioni utilizzati sono<br />
elencate nelle tabelle 4.1 e 4.2.<br />
Il tubo è dotato di elettrodi di nickel applicati per deposizione<br />
elettrochimica sull’intera superficie interna ed esterna. I cavi elet-
4.2 Risultati sperimentali e confronto con i risultati teorici 78<br />
Cilindro<br />
Lunghezza assiale l (mm) 76±0.25<br />
Diametro esterno de (mm) 50±0.64<br />
Spessore s (mm) 5±0.51<br />
Spessore elettrodi (µm) 2.54<br />
Tabella 4.1: Dimensioni geometriche e tolleranze meccaniche del Cilindro<br />
piezoelettrico utilizzato, dichiarate da catalogo.<br />
Piastrina<br />
Lunghezza l1 (mm) 20.0±0.1<br />
Larghezza l2 (mm) 10.0±0.1<br />
Spessore s (mm) 1±0.11<br />
Spessore elettrodi (˚A) 3000<br />
Tabella 4.2: Dimensioni geometriche e tolleranze meccaniche della piastrina<br />
piezoelettrica utilizzata, dichiarate da catalogo.<br />
trici sono invece stati fissati tramite una vernice costituita da ar-<br />
gento metallico e da un solvente volatile a contatto con l’aria.<br />
L’asse di polarizzazione della ceramica è disposto in perpendico-<br />
lare alla superficie sia per il cilindro sia per la piastrna.<br />
Sulla piastrina gli elettrodi di alluminio sono depositati sull<br />
superfici maggiori per sputtering. I cavi elettrici sono fissati in<br />
maniera analoga al cilindro.<br />
4.2.2 Misure sperimentali relative al cilindro<br />
Per ambedue i campioni si sono effettuati le seguenti misure:<br />
• Misura dell’impedenza elettrica e meccanica, per la rilevazione<br />
della modo di vibrazione fondamentale della struttura;
4.2 Risultati sperimentali e confronto con i risultati teorici 79<br />
Impedenza [Ω]<br />
70<br />
50<br />
30<br />
10<br />
-10<br />
15 17 19 21 23<br />
Frequenza [kHz]<br />
Figura 4.5: Impedenza del cilindro.<br />
• Misura degli spettri del segnale rilevato sulla superficie in<br />
vibrazione mediante tecnica inteferometrica;<br />
• Misura dell’ampiezza di pilotaggio di soglia al variare della<br />
frequenza di pilotaggio;<br />
• Misura dell’ampiezza fondamentale di soglia al variare della<br />
frequenza di pilotaggio;<br />
• Misura e confronto delle ampiezze della fondamentale e delle<br />
armoniche frazionali al variare dell’ampiezza di pilotaggio;<br />
• Misura e confronto delle ampiezze della fondamentale e delle<br />
armoniche frazionali al variare della posizione lungo gli assi<br />
delle strutture.<br />
In figura 4.5 si riporta l’impedenza misurata sul cilindro cavo,<br />
descritto nel capitolo precedente.
4.2 Risultati sperimentali e confronto con i risultati teorici 80<br />
La figura evidenza la presenza di una risonanza alla frequenza<br />
di 16.9 kHz. A questa frequenza per il cilindro si presenta un<br />
modo d’oscillazione A1,0,0 che corrisponde al suo modo assiale.<br />
Come appare nel diagramma, i vari modi sono accomunati da<br />
una forma snella delle curve di risonanza, cioè da un alto valore<br />
del fattore meccanico. Questo è indice di un trascurabile smorza-<br />
mento interno della ceramica piezoelettrica. Le possibili fonti di<br />
dissipazione sono dovute, nelle applicazioni pratiche dei risonatori<br />
studiati, a cause esterne, quali vincoli di supporto o fluidi viscosi<br />
a contatto con la struttura.<br />
La snellezza della forma dei picchi determina curve di risposta,<br />
relative a ciascun modo, non sovrapposte tra loro. In questa con-<br />
dizione, i modi di vibrazione risultano disaccoppiati: eccitando il<br />
campione su una certa risonanza, esso risponderà con il solo modo<br />
di vibrazione relativo a quella frequenza. Non interverranno, in-<br />
vece, i modi di vibrazione caratteristici di altre risonanze. Finché<br />
si verifica questa condizione la vibrazione risulta essere in regime<br />
lineare.<br />
Bisogna osservare come gli spettri rilevati sperimentalmente<br />
varino in relazione alla tensione applicata al campione [21]: all’au-<br />
mentare della tensione (o potenza) applicata al campione piezoelet-<br />
trico analizzato, si verifica una traslazione dei picchi di risonanza<br />
verso frequenze più basse, con una diminuzione del fattore mec-<br />
canico relativo a ciascuna risposta. Il fenomeno è una chiara indi-<br />
cazione dell’instaurarsi nella struttura di un regime di vibrazione
4.2 Risultati sperimentali e confronto con i risultati teorici 81<br />
non lineare; si pensi, ad esempio, a quanto ricordato per l’oscilla-<br />
tore di Duffing (paragrafo 3.1) con molla soffice: la flessione verso<br />
sinistra della curva di risposta è un comportamento paragonabile<br />
allo spostamento del picco di risonanza verso frequenze più basse<br />
nel caso del tubo piezoelettrico.<br />
Verifica della presenza di vibrazioni subarmoniche di ordine 1/2<br />
Vengono dette vibrazioni subarmoniche o armoniche frazionali<br />
di ordine 1/2 le vibrazioni che si instaurano ad una frequenza pari<br />
alla metà (1/2) della frequenza dell’armonica frazionale.<br />
In questo paragrafo verrà mostrata la presenza di frequenze di<br />
vibrazione a frequenze pari a 1/2 della frequenza fondamentale.<br />
Al paragrafo 4.1.1 è stata descritta la catena di misura utilizza-<br />
ta nel rilievo del campo degli spostamenti dei punti della superficie<br />
del campione. Come detto, il tubo piezoelettrico è stato poggiato<br />
di base, in posizione verticale, su un supporto adatto a realizzare<br />
spostamenti in direzione verticale. Muovendo in tal maniera il<br />
campione, con il fascio laser incidente sulla superficie esterna si<br />
sono realizzate scansioni lungo le direttrici del campione. La figu-<br />
ra 4.6 schematizza gli spostamenti relativi tra raggio laser e tubo<br />
piezoelettrico.<br />
La figura 4.7 mostra, nel punto che si trova a mezza altezza<br />
dell’asse del cilindro, lo spettro del segnale rilevato quando agli<br />
elettrodi viene applicata una tensione alternata alla frequenza di<br />
risonanza di 16.9 kHz con ampiezza 6 V. Come previsto è pre-
4.2 Risultati sperimentali e confronto con i risultati teorici 82<br />
z<br />
Figura 4.6: Spostamenti relativi tra raggio laser e tubo piezoelettrico.<br />
sente una vibrazione abbastanza pronunciata alla frequenza fon-<br />
damentale, corrispondente alla frequenza di pilotaggio. Inoltre, si<br />
verifica, già a quest’ampiezza di eccitazione, la presenza di non<br />
linearità del secondo e terzo ordine con la presenza di frequenze<br />
di vibrazioni al doppio e triplo del valore della fondamentale.<br />
Le misure effettuate sono state indirizzate allo studio del regime<br />
di vibrazione non lineare dei risonatori. In particolare sono stati<br />
evidenziati i comportamenti tenuti dal campione al superamento<br />
della soglia di eccitazione di vibrazioni a frequenze 1/2 da parte<br />
della tensione di pilotaggio. Inoltre, a seguito del battimento<br />
tra la frequenza 1/2 e quella di pilotaggio (a 1) nasce anche una<br />
vibrazione a frequenza pari a 3/2 la frequenza di pilotaggio [17].<br />
Per il cilindro tale ampiezza di soglia risulta essere di 14.5
4.2 Risultati sperimentali e confronto con i risultati teorici 83<br />
Ampiezza [dBm]<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
10 20 30 40<br />
Frequenza<br />
Figura 4.7: Spettro in frequenza del segnale rilevato (Cilindro, 6 V, 16.9 kHz).<br />
Ampiezza [dBm]<br />
-20<br />
-40<br />
-60<br />
-80<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.8: Spettro in frequenza del segnale rilevato (Cilindro, 14.5 V, 16.9<br />
kHz).<br />
V. Come evidenziato dalla figura 4.8, che mostra lo spettro in<br />
frequenza della vibrazione rilevata dal sistema di misura al cen-<br />
tro dell’asse del cilindro, sono presenti due vibrazioni a frequenze<br />
rispettivamente 8.45 kHz (1/2 volte 16.9 kHz) e 25.35 kHz (3/2
4.2 Risultati sperimentali e confronto con i risultati teorici 84<br />
volte 16.9 kHz).<br />
Verifica del fenomeno della soglia e confronto con il modello analitico<br />
Uno degli aspetti che caratterizza i fenomeni di oscillazione a<br />
frequenze che siano frazione della fondamentale (armoniche frazion-<br />
ali), che come è stato illustrato nel paragrafo precedente prende<br />
il nome di oscillazione parametrica, è la presenza di un livello di<br />
soglia che deve essere raggiunto dall’ampiezza della fondamentale.<br />
Infatti la generazione delle vibrazioni a frequenze frazionali ri-<br />
portate nella figura 4.8 avviene al superamento di un valore pre-<br />
ciso di un’ampiezza di eccitazione, oltre il quale si sono presen-<br />
tate tali vibrazioni con ampiezze non trascurabili rispetto alla vi-<br />
brazione fondamentale. Questo è sintomatico della presenza di un<br />
fenomeno di soglia nella generazione delle armoniche frazionali.<br />
Nella figura 4.9 è riportato l’andamento dell’ampiezza di soglia<br />
della tensione di pilotaggio rispetto alla frequenza di pilotaggio<br />
del campione (l’unità di misura dell’ampiezza di soglia deve essere<br />
moltiplicata per il fattore di amplificazione, che risulta costante<br />
alle frequenze analizzate). L’ampiezza dell’armonica fondamen-<br />
tale è direttamente proporzionale all’ampiezza di pilotaggio, in<br />
modo lineare, almeno fino al raggiungimento del livelo di soglia.<br />
Si evidenzia come sia presenta un minimo in corrispondenza della<br />
frequenza di 16.9 kHz, cioé la frequenza del modo fondamentale.<br />
Questo è un comportamento tipico delle oscillazioni parametriche<br />
quali quelle descritte dall’equazione di Mathieu, analizzata nella
4.2 Risultati sperimentali e confronto con i risultati teorici 85<br />
Livello di Soglia dell’Ampiezza di Pilotaggio [V]<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
16.0 16.5 17.0 17.5 18.0 18.5 19.0<br />
Frequenza [kHz]<br />
Figura 4.9: Livello di soglia [V] rispetto alla frequenza [kHz] del segnale di<br />
pilotaggio (Cilindro).<br />
Livello di Soglia dell’Ampiezza di Pilotaggio [V]<br />
40<br />
30<br />
20<br />
10<br />
0<br />
16.6 16.7 16.8 16.9<br />
Frequenza [kHz]<br />
Figura 4.10: Livello di soglia [V] rispetto alla frequenza [kHz] del segnale di<br />
pilottagio (dettaglio del Cilindro).<br />
parte teorica del presente capitolo.<br />
La figura 4.10 mostra un dettaglio del comportamento del-<br />
l’ampiezza di soglia rispetto alla frequenza di eccitazione.<br />
Un’altro aspetto sperimentale che trova riscontro anche nel
4.2 Risultati sperimentali e confronto con i risultati teorici 86<br />
Ampiezza di Vibrazione [nm]<br />
12.2<br />
11.8<br />
11.4<br />
11.0<br />
16.4 16.5 16.6 16.7 16.8 16.9 17.0 17.1<br />
Frequenza [kHz]<br />
Centro<br />
5 mm dal Centro<br />
25 mm dal Centro<br />
Figura 4.11: Andamento della soglia al variare della frequenza di pilotaggio<br />
per diversi punti lungo l’asse del cilindro.<br />
modello analitico descritto in 3.4.2 riguarda l’indipendenza della<br />
solgia che deve assumere l’ampiezza di vibrazione fondamentale<br />
al variare della frequenza di pilotaggio (si veda l’equazione 3.68).<br />
Nella seguente figura 4.11 sono mostrate le curve rappresentan-<br />
ti l’ampiezza di soglia che la fondamentale deve superare al fine<br />
di generare le armoniche frazionali al variare della frequenza di<br />
pilotaggio. Inoltre sono anche riportate diverse curve per diversi<br />
punti lungo l’asse del cilindro. Ciò è una prima affermazione del<br />
carattere ”locale” dell’interazione non lineare per la generazione<br />
dell’armonica frazionale di ordine 1/2, in maniera coerente con<br />
l’equazione 3.68 [16].<br />
Risulta evidente l’indipendenza del fenomeno di soglia sia dal<br />
modo di vibrazione che si è instaurato (frequenza) sia dalla po-<br />
sizione lungo le superfici vibranti.
4.2 Risultati sperimentali e confronto con i risultati teorici 87<br />
Ampiezza [a. u.]<br />
60<br />
40<br />
20<br />
0<br />
A1/2<br />
A1<br />
A3/2<br />
5 10 15 20 25<br />
Ampiezza di Pilotaggio [mV]<br />
Figura 4.12: Andamento dell’ampiezza della fondamentale e delle subar-<br />
moniche rispetto all’ampiezza di pilotaggio (Cilindro).<br />
Verifica dell’andamento spaziale di armoniche e subarmoniche<br />
Uno degli aspetti singolari rilevati nel presente studio con-<br />
siste della dipendenza spaziale delle oscillazioni a frequenze pari<br />
a frazioni della frequenza fondamentale. Questo fenomeno di-<br />
mostra come la generazione delle armoniche frazionali sia legata<br />
al raggiungimento ”locale” di un’ampiezza di soglia da parte del-<br />
l’ampiezza dell’armonica fondamentale, direttamente proporzionale<br />
all’ampiezza di pilotaggio, che è il vero e proprio pilotaggio del<br />
fenomeno delle armoniche frazionali.<br />
A dimostrazione della ”localizzazione” del fenomeno di gener-<br />
azione dell’armonica fraziionale di ordine 1/2 (e conseguentemente<br />
di ordine 3/2,) sono riportate le figure 4.12 e 4.13.<br />
Nella prima è riportato l’andamento delle ampiezze dell’armon-<br />
ica fondamenentale e delle subarmonica di ordine 1/2 e 3/2, in fun-
4.2 Risultati sperimentali e confronto con i risultati teorici 88<br />
zione dell’ampiezza di pilotaggio. Le misure sono state effettuate<br />
con lo spot del fascio laser dell’interferomentro in posizione cor-<br />
rispondente al centro dell’asse del cilindro, dove l’ampiezza della<br />
fondamentale risulta massima [15], [18].<br />
Risulta evidente come all’aumentare dell’ampiezza di pilotaggio<br />
l’ampiezza della fondamentale cresca linearmente, fenomeno pre-<br />
visto anche in regime non lineare, ma prima del raggiungimento<br />
del valore di soglia, in cui risultano presenti armoniche di ordine<br />
superiore (secondo, terzo, ecc. ordine) [15], [18]. D’altra parte<br />
l’armonica frazionale di ordine 1/2, risulta inesistente, cioé non è<br />
ancora stata eccitata.<br />
Le armoniche frazionali risultano presenti solo al superamento<br />
da parte dell’ampiezza di pilotaggio di un valore di soglia (si veda<br />
il paragrafo 3.4.2 per i dettagli teorici), superato il quale queste<br />
ampiezze risultano bene evidenti e acquistano valori stabili pari<br />
al 30 − 40% dell’ampiezza della fondamentale. Inoltre, si verifi-<br />
ca un abbattimento dell’ampiezza della fondamentale di circa il<br />
30 − 35%, ciò è dovuto alla necessità di far fluire energia dalla<br />
fondamentale alle armoniche frazionali appena generate.<br />
La figura 4.13 mostra l’andamento dell’ampiezza della fonda-<br />
mentale e delle armoniche frazionali di ordine 1/2 e 3/2, al variare<br />
della posizione dello spot dell’interferometro lungo l’asse del cilin-<br />
dro. Il punto indicato a 0 mm corrisponde al punto più distante<br />
dal centro dell’asse, che si trova in corrispondenza del punto indi-<br />
cato a 36 mm. E’ riportata solo la prima metà del cilindro essendo
4.2 Risultati sperimentali e confronto con i risultati teorici 89<br />
Ampiezza [a. u.]<br />
60<br />
40<br />
20<br />
0<br />
A1/2<br />
A1<br />
A3/2<br />
0 4 8 12 16 20 24 28 32 36<br />
Posizione [mm]<br />
Figura 4.13: Andamento dell’ampiezza della fondamentale e delle subar-<br />
moniche lungo l’asse del cilindro.<br />
l’altra metà simmetrica sia in termini geometrici sia in termini di<br />
vibrazioni.<br />
L’ampiezza di pilotaggio in queste misure è tale da superare<br />
il livello di soglia per la generazione di armoniche frazionali in<br />
corrispondenza del centro dell’asse del cilindro. E’ stata utilizzata<br />
quella ricavata dalle precedente misure sperimentali, pari a 14, 5<br />
V.<br />
Le misure sono state effettuate a partire dal bordo superiore<br />
del cilindro scendendo lungo il suo asse spostando lo spot di 2 mm<br />
alla volta.<br />
Nonostante il raggiungimento del livello di soglia da parte del<br />
pilotaggio, nella fase iniziale dell’esperimento (cioé nei punti più<br />
lontani dal centro), non si evidenziano armoniche frazionali e l’am-<br />
piezza della fondamentale cresce linearmente all’avvicinarsi al cen-
4.2 Risultati sperimentali e confronto con i risultati teorici 90<br />
tro dell’asse del cilindro, come già verificato nel comportamento<br />
non lineare sotto soglia [18].<br />
La crescita lineare della fondamentale continua fino a 10 mm<br />
dal centro dell’asse, punto a partire dal quale subisce una riduzione,<br />
dovuta al fluire dell’energia meccanica delle vibrazioni verso le ar-<br />
moniche frazionali, non ancora evidenziatesi in maniera stabile.<br />
Le armoniche frazionali di ordine 1/2 e 3/2 risultano formate e<br />
stabili, con ampiezza di circa il 30% della fondamentale solo in<br />
corrispondenza del centro.<br />
Questo fenomeno evidenzia inequivocabilmente come la genera-<br />
zione parametrica delle armoniche frazionali, di ordine 1/2 e 3/2,<br />
sia localizzata in corrispondenza dei soli punti in cui l’ampiez-<br />
za della fondamentale supera la soglia, facendovi fluire l’energia<br />
meccanica necessaria alla loro generazione.<br />
Ulteriormente esplicative sono le seguenti due figure, che ri-<br />
portano le misure sperimentali effettuate lungo tutto l’asse del<br />
cilindro.<br />
La figura 4.14 mostra l’andamento dell’ampiezza della fonda-<br />
mentale e dell’armonica frazionale di ordine 1/2 rispetto all’ampiez-<br />
za di soglia (ampiezza di pilotaggio a 11.6 V)(non si riporta l’ampiez-<br />
za dell’armonica di ordine 3/2, dato che, essendo generata dal<br />
battimento delle due precendenti, risulta superflua). In queste<br />
misura il comportamento del sistema in vibrazione risulta essere<br />
lineare, in fatti risulta immediatamente evidente come l’ampiezza<br />
della fondamentale non abbia raggiunto il livello di soglia. Si noti
4.2 Risultati sperimentali e confronto con i risultati teorici 91<br />
Ampiezza (nm)<br />
12<br />
8<br />
4<br />
0<br />
Livello di Soglia<br />
Α1<br />
Α1/2<br />
0 15 30 45 60 75<br />
Posizione (mm)<br />
Figura 4.14: Andamento dell’ampiezza della fondamentale e dell’armonica di<br />
ordine 1/2 lungo l’asse del cilindro rispetto al livello di soglia (sotto soglia).<br />
che in questa figura è riportato l’andamento rispetto a tutto l’asse<br />
del cilindro, e l’ampiezza della fondamentale mostra l’andamento<br />
previsto in [18] per il comportamento non lineare sotto soglia.<br />
La figura 4.15, mostra, invece, cosa avviene nei punti in cui<br />
la soglia per la generazione delle armoniche frazionali è raggiunta<br />
dall’ampiezza della fondamentale (ampiezza di pilotaggio 14.5 V):<br />
quest’ultima subisce un decremento (come già descritto in prece-<br />
denza del 30 − 35%) dovuto al fluire dell’energia meccanica della<br />
vibrazione verso le armoniche frazionali, che a loro volta diven-<br />
tano stabili e con valori non più trascurabili rispetto all’armonica<br />
fondamentale (come già descritto in precedenza arrivano ad avere<br />
un’ampiezza del 30 − 40% della fondamentale)<br />
Inoltre, nella figura 4.16 sono riportati gli spettri in frequenza<br />
del segnale di vibrazione rilevato sulla superficie del cilindro al
4.2 Risultati sperimentali e confronto con i risultati teorici 92<br />
Ampiezza (nm)<br />
12<br />
8<br />
4<br />
0<br />
Livello di Soglia Α1<br />
Α1/2<br />
0 15 30 45 60 75<br />
Posizione (mm)<br />
Figura 4.15: Andamento dell’ampiezza della fondamentale e dell’armonica di<br />
ordine 1/2 lungo l’asse del cilindro rispetto al livello di soglia (sopra soglia).<br />
-10<br />
-40<br />
-70<br />
10<br />
-10<br />
-30<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
(a)<br />
(c)<br />
Ampiezza [dBm]<br />
Ampiezza [dBm]<br />
10<br />
-10<br />
-30<br />
-10<br />
-40<br />
-70<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.16: Spettri in frequenza al variare della posizione di rilevazione del<br />
segnale (Cilindro).<br />
variare della posizione: l’ampiezza di pilotaggio viene mantenuta<br />
costante.<br />
La (a) corrisponde a un punto distante 9 mm dal centro del<br />
cilindro, la (b) a 6 mm e la (c) a 3 mm, mentre lo spettro del<br />
(b)<br />
(d)
4.2 Risultati sperimentali e confronto con i risultati teorici 93<br />
-10<br />
-40<br />
-70<br />
10<br />
-10<br />
-30<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
(a)<br />
(c)<br />
Ampezza [dBm]<br />
Ampezza [dBm]<br />
10<br />
-10<br />
-30<br />
-10<br />
-40<br />
-70<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.17: Spettri in frequenza al variare dell’ampiezza di pilotaggio di<br />
rilevazione del segnale (Cilindro).<br />
segnale mostrato nella (d) è rilevato proprio in corrispondenza del<br />
centro dell’asse del cilindro, dove l’ampiezza di vibrazione della<br />
componente fondamentale è in corrispondenza del suo massimo<br />
[18]. Questa figura dimostra ulteriormente come il fenomeno del-<br />
la generazione delle armoniche frazionali sia legato all’ampiezza<br />
di pilotaggio. Infatti, all’avvicinarsi al centro dell’asse del cilin-<br />
dro e, quindi, all’aumentare dell’ampiezza dell’armonica fonda-<br />
mentale, si sviluppa il fenomeno delle armoniche frazionali, fi-<br />
no a consolidarsi in maniera stabile una volta raggiunto il centro<br />
dell’asse.<br />
La figura 4.17 illustra una figura analoga alla precedenta, solo<br />
che risulta da misure effettuate al variare non della posizione, ma<br />
dell’ampiezza di pilotaggio((a) 11.6 V, (b) 12.5 V, (c) 13.5 V, (d)<br />
14.5 V).<br />
(b)<br />
(d)
4.2 Risultati sperimentali e confronto con i risultati teorici 94<br />
Anche queste misure evidenziano, quindi, come il fenomeno<br />
della generazione delle subarmoniche sia ”locale” e dipendente<br />
dall’ampiezza della vibrazione fondamentale. Infatti, se l’ampiez-<br />
za della fondamentale supera la soglia, che sia ciò dovuto allo<br />
spostarsi lungo l’asse del cilindro o che sia dovuto all’aumentare<br />
dell’ampiezza di pilotaggio (a cui l’ampiezza della fondamentale<br />
è direttamente proporzionale) si verifica comunque il fenomeno<br />
dell’insorgenza delle armoniche frazionali.<br />
4.2.3 Misure sperimentali relative alla piastrina<br />
Nella presente sezione si illustrano i risultati sperimentali ot-<br />
tenuti per la piastrina, la cui struttura geometrica è stata descritta<br />
nel Paragrafo precedente 4.2.1 e risulta completamente diversa da<br />
quella del cilindro. Nonostante tale diversità, i risultati sperimen-<br />
tali ottenuti sono analoghi e confortano i risultati analitici descritti<br />
nella prima Sezione del presente Capitolo.<br />
Le misure sperimentali effettuate hanno seguito lo stesso per-<br />
corso delle misure effettuate sul cilindro, al fine di consentire un<br />
valido confronto.<br />
In figura 4.18 si riporta l’impedenza misurata sulla piastrina,<br />
la lastra sottile a sezione rettangolare le cui caratteristiche ge-<br />
ometriche, meccaniche ed elettriche sono descritte nella seconda<br />
sezione del Capitolo.<br />
La figura evidenza la presenza di una risonanza alla frequenza<br />
di 12.9 kHz, corrispondente al suo modo assiale.
4.2 Risultati sperimentali e confronto con i risultati teorici 95<br />
Impedenza [ Ω]<br />
12<br />
8<br />
4<br />
0<br />
10 12 14 16 18<br />
Frequenza [kHz]<br />
Figura 4.18: Impedenza della piastrina.<br />
Le osservazioni effettuate per il cilindro riguardo le curve di<br />
risonanza e l’accoppiamento dei modi di vibrazione hanno lo stesso<br />
valore anche per la piastrina.<br />
Verifica della presenza di vibrazioni subarmoniche di ordine 1/2<br />
La figura 4.19 mostra lo spettro in frequenza del segnale rile-<br />
vato al centro della piastrina quando agli elettrodi viene applicata<br />
una tensione alternata alla frequenza di risonanza di 12.9 kHz con<br />
ampiezza 5, 8 V. Come previsto è presente una vibrazione abbas-<br />
tanza pronunciata e si verifica, già a quest’ampiezza di eccitazione,<br />
la presenza di non linearità del secondo e terzo ordine con la pre-<br />
senza di frequenze di vibrazioni al doppio e triplo del valore della<br />
fondamentale, come risulta evidenziato dalla figura stessa.<br />
Anche per la piastrina le misure sono state indirizzate al fine<br />
di evidenziare i comportamenti che si presentano al superamento
4.2 Risultati sperimentali e confronto con i risultati teorici 96<br />
Ampiezza [dBm]<br />
-20<br />
-40<br />
-60<br />
-80<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.19: Spettro in frequenza del segnale rilevato (Piastrina, 5,8 V, 12.9<br />
kHz).<br />
Ampiezza [dBm]<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.20: Spettro in frequenza del segnale rilevato (Piastrina, 53,4 V, 12.9<br />
kHz).<br />
della soglia di eccitazione di vibrazioni alla frequenza 1/2 (armon-<br />
ica frazionale di ordine 1/2) da parte della tensione di pilotaggio<br />
e della fondamentale.<br />
Per la piastrina tale ampiezza di soglia risulta essere di 53, 4
4.2 Risultati sperimentali e confronto con i risultati teorici 97<br />
V. Come evidenziato dalla figura 4.20, che mostra lo spettro in<br />
frequenza della vibrazione rilevata dal sistema di misura al cen-<br />
tro dell’asse del cilindro, sono presenti due vibrazioni a frequen-<br />
ze rispettivamente 6, 45 kHz (1/2 volte 12.9) e 19, 35 kHz (3/2<br />
volte 12.9), quest’ultima derivante dal fenomeno di battimento<br />
tra l’armonica fondamentale e l’armonica frazionale di ordine 1/2.<br />
Verifica del fenomeno della soglia e confronto con il modello analitico<br />
Nella figura 4.21 è riportato l’andamento dell’ampiezza di soglia<br />
rispetto alla frequenza di pilotaggio del campione (l’unità di misura<br />
dell’ampiezza di soglia deve essere moltiplicato per il fattore di<br />
amplificazione, che risulta costante alle frequenze analizzate). Si<br />
evidenzia come sia il minimo presente in corrispondenza della fre-<br />
quenza di 12.9 kHz, cioé la frequenza del modo fondamentale,<br />
come avviene anche per il Camione 1.<br />
Anche per la piastrina si è proceduto nel valutare l’indipenden-<br />
za che l’ampiezza di soglia dalla frequenza di pilotaggio (si veda<br />
il modello analitico nel paragrafo 3.4.2.<br />
Il risutlato di tale analisi sperimentale è riportato nella figura<br />
4.22 e risulta analogo a quanto mostrato per il cilindro; come<br />
analoghi sono i commenti che ne scaturiscono: l’ampiezza che la<br />
fondamentale deve assumere per generare le armoniche frazionali<br />
è costante al variare della frequenza di pilotaggio, coerentemente<br />
con il modello analitico (equazione 3.68)
4.2 Risultati sperimentali e confronto con i risultati teorici 98<br />
Livello di Soglia dell’ampiezza di Pilotaggio [mV]<br />
350<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
12.7 12.8 12.9 13.0 13.1<br />
Frequenza [kHz]<br />
Figura 4.21: Livello di soglia [V] rispetto alla frequenza [kHz] del segnale di<br />
pilottagio (Piastrina).<br />
Ampiezza della Vibrazione [nm]<br />
12.0<br />
11.8<br />
11.6<br />
11.4<br />
11.2<br />
11.0<br />
10.8<br />
12.70 12.75 12.80 12.85 12.90 12.95<br />
Frequenza [kHz]<br />
Figura 4.22: Andamento della soglia al variare della frequenza di pilotaggio<br />
in corrispondenza del centro della piastrina.<br />
Verifica dell’andamento spaziale di armoniche e subarmoniche<br />
Anche in questa fase sperimentale della presenti tesi si è potuto<br />
verificare il carattere della dipendenza spaziale delle oscillazioni a
4.2 Risultati sperimentali e confronto con i risultati teorici 99<br />
Ampiezza [a. u.]<br />
500<br />
400<br />
300<br />
200<br />
100<br />
0<br />
A1/2<br />
A1<br />
A3/2<br />
65 70 75 80 85 90<br />
Ampiezza Pilotaggio [mV]<br />
Figura 4.23: Andamento dell’ampiezza della fondamentale e delle subar-<br />
moniche rispetto all’ampiezza di pilotaggio (Piastrina).<br />
frequenze pari a frazioni della frequenza fondamentale.<br />
Infatti le figure 4.23 e 4.24 risultano del tutto analoghe alle<br />
figure 4.12 e 4.13 (in quest’ultima di evidenzia un diverso profilo<br />
di vibrazione della fondamentale, dovuto alla geometria)<br />
Anch’esse dimostrano come il fenomeno della generazione delle<br />
armoniche frazionali sia ”localizzato” spazialmente in quei punti in<br />
cui l’armonica fondamentale supera il valore di soglia necessario.<br />
Nella figura 4.23 ottenuta all’aumentare dell’ampiezza di pi-<br />
lotaggio e, conseguentemente, dell’ampiezza della fondamentale,<br />
le armoniche frazionali sorgono al superamento della soglia e ac-<br />
quistano un valore stabile pari a circa il 25 − 30% quello della<br />
fondamentale, che a sua volta subisce una riduzione del 30% a<br />
causa del fluire della sua energia di vibrazione verso le armoniche<br />
frazionali.
4.2 Risultati sperimentali e confronto con i risultati teorici 100<br />
Ampiezza [a. u.]<br />
600<br />
400<br />
200<br />
0<br />
A1/2<br />
A1<br />
A3/2<br />
0 5 10 15 20<br />
Posizione [mm]<br />
Figura 4.24: Andamento dell’ampiezza della fondamentale e delle subar-<br />
moniche rispetto alla posizione lungo l’asse maggiore della piastrina.<br />
La figura 4.24 mostra l’andamento dell’ampiezza della fonda-<br />
mentale e delle armoniche frazionali di ordine 1/2 e 3/2, al variare<br />
della posizione dello spot dell’interferometro lungo l’asse centrale<br />
della piastrina. Il punto indicato a 0 mm corrisponde al punto più<br />
distante dal centro di tale asse, che si trova in corrispondenza del<br />
punto indicato a 20 mm.<br />
L’ampiezza di pilotaggio in queste misure è tale da superare<br />
il livello di soglia per la generazione di armoniche frazionali in<br />
corrispondenza del centro dell’asse del cilindro. E’ stata utilizzata<br />
quella ricavata dalle precedente misure sperimentali, pari a 38, 9<br />
V.<br />
Nonostante il raggiungimento del livello di soglia da parte del<br />
pilotaggio, nella fase iniziale dell’esperimento (cioé nei punti più<br />
lontani dal centro), non si evidenziano armoniche frazionali e l’am-
4.2 Risultati sperimentali e confronto con i risultati teorici 101<br />
piezza della fondamentale cresce linearmente all’avvicinarsi al cen-<br />
tro dell’asse.<br />
La crescita lineare della fondamentale continua fino a 5 mm dal<br />
centro dell’asse, punto a partire dal quale subisce una riduzione,<br />
dovuta al fluire dell’energia meccanica delle vibrazioni verso le<br />
armoniche frazionali, non ancora evidenziatesi in maniera stabile.<br />
Le armoniche frazionali di ordine 1/2 e 3/2 risultano formate e<br />
stabili, con ampiezza di circa il 30% della fondamentale solo in<br />
corrispondenza del centro.<br />
Come commentatato per il cilindro, anche per la piastrina si<br />
può dire che la generazione parametrica delle armoniche frazionali,<br />
di ordine 1/2 e 3/2, è localizzata in corrispondenza dei soli punti<br />
in cui l’ampiezza della fondamentale supera la soglia, facendovi<br />
fluire l’energia meccanica necessaria alla loro generazione.<br />
Analogamente a quanto fatto per il cilindro, nella figura 4.25<br />
sono riportati gli spettri in frequenza del segnale di vibrazione<br />
rilevato sulla superficie della piastrina al variare della posizione:<br />
l’ampiezza di pilotaggio viene mantenuta costante.<br />
La (a) corrisponde a un punto distante 9 mm dal centro del<br />
cilindro, la (b) a 6 mm e la (c) a 3 mm, mentre lo spettro del<br />
segnale mostrato nella (d) è rilevato proprio in corrispondenza del<br />
centro dell’asse del cilindro. Anche in questa figurasi dimostra<br />
ulteriormente come il fenomeno della generazione delle armoniche<br />
frazionali sia legato all’ampiezza di pilotaggio. Infatti, all’avvic-<br />
inarsi al centro dell’asse della piastrina e, quindi, all’aumentare
4.2 Risultati sperimentali e confronto con i risultati teorici 102<br />
-10<br />
-40<br />
-70<br />
-10<br />
-40<br />
-70<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
(a)<br />
(c)<br />
Ampiezza [dBm]<br />
Ampiezza [dBm]<br />
-10<br />
-40<br />
-70<br />
-10<br />
-40<br />
-70<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.25: Spettri in frequenza al variare della posizione di rilevazione del<br />
segnale (Piastrina).<br />
dell’ampiezza dell’armonica fondamentale, si sviluppa il fenomeno<br />
delle armoniche frazionali, fino a consolidarsi in maniera stabile<br />
una volta raggiunto il centro dell’asse.<br />
La figura 4.26 illustra una figura analoga alla precedenta, solo<br />
che risulta da misure effettuate al variare non della posizione, ma<br />
dell’ampiezza di pilotaggio ((a) 47.5 V, (b) 49.5 V, (c) 51.5 V, (d)<br />
53.4 V).<br />
In conclusione, tutta la presenta sezione, in cui è stato descritto<br />
il comportamento della piastrina, è stato possibile rilevare come<br />
il fenomeno della generazione delle armoniche frazionali sia in-<br />
dipendente dalla forma geometrica assunta dal campione in esame.<br />
Infatti, le due strutture esaminate sono estremamente diverse tra<br />
loro, ma presentano un comportamento analogo dal punto di vista<br />
delle armoniche frazionali. Anche questa osservazione, oltre a es-<br />
(b)<br />
(d)
4.2 Risultati sperimentali e confronto con i risultati teorici 103<br />
-10<br />
-40<br />
-70<br />
-14<br />
-36<br />
-58<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
(a)<br />
(c)<br />
Ampiezza [dBm]<br />
Ampiezza [dBm]<br />
-5<br />
-20<br />
-35<br />
-10<br />
-40<br />
-70<br />
10 20 30 40<br />
10 20 30 40<br />
Frequenza [kHz]<br />
Figura 4.26: Spettri in frequenza al variare dell’ampiezza di pilotaggio di<br />
rilevazione del segnale (Piastrina).<br />
sere di supporto al modello analitico sviluppato sull’equazione di<br />
Mathieu, è un’ulteriore prova della ”localizzazione” del fenomeno.<br />
(b)<br />
(d)
Capitolo 5<br />
CONCLUSIONI e SVILUPPI<br />
FUTURI<br />
CONCLUSIONI<br />
Il presente lavoro di tesi ha permesso di analizzare ed appro-<br />
fondire diversi aspetti riguardanti le vibrazione non lineari di cam-<br />
pioni piezoelettrici, in particolare per ciò che riguarda la generazio-<br />
ne di vibrazioni corrispondenti ad armoniche frazionali di ordine<br />
1/2.<br />
E’ stato fornito un modello analitico, che attraverso l’equazione<br />
di Mathieu descrive l’insorgere di armoniche frazionali; tale model-<br />
lo è stato verificato sperimentalmente attraverso misure effettuate<br />
su due campioni piezoelettrici di geometrie diverse.<br />
Per ambedue i campioni:<br />
• E’ stato dimostrato analiticamente e verificato sperimental-<br />
mente come il fenomeno della generazione delle armoniche
105<br />
frazionali sia dipendente dal raggiungimento da parte del-<br />
l’ampiezza della fondamentale di un livello di soglia;<br />
• E’ stato verificato analiticamente e sperimentalmente che, per<br />
generare vibrazioni alle frequenze delle armoniche frazion-<br />
ali, è necessario che l’ampiezza della fondamentale superi un<br />
valore di soglia. Questa soglia è risultata indipendente dal-<br />
la frequenza di pilotaggio e quindi dal modo di vibrazione<br />
isntauratosi nella struttura in esame;<br />
• E’ stato dimostrato analiticamente e dimostrato sperimen-<br />
talmente come il fenomeno della generazione delle armoniche<br />
frazionali sia a carattere ”locale”.<br />
Il fenomeno della generazione delle armoniche frazionali è risul-<br />
tato indipendente dalla geometria del campione analizzato, ciò<br />
come conseguenza della ”localizzazione” del fenomeno stesso. In-<br />
fatti, per tutti i coampioni esaminati, indipendentemente dalla<br />
loro configarazione geometrica, il processo e le condizioni sotto<br />
cui si generano le armoniche frazionali sono identiche.<br />
SVILUPPI FUTURI<br />
Lo studio sperimentale della generazione delle armoniche fra-<br />
zionali ha messo in evidenza una fase di transizione nel processo<br />
messo in atto dipendente sia dal valore ”locale” dell’ampiezza di<br />
vibrazione dell’oscillazione alla frequenza fondamentale sia dalla<br />
frequenza di pilotaggio dei campioni piezoelettrici. Osservando
106<br />
le figure 4.16 e 4.17 per il cilindro e 4.25 e 4.26 per la piastrina<br />
si osserva l’innalzamento della base dello spettro del segnale ((b)<br />
e (c)) rispetto a prima dell’instaurarsi delle armoniche frazionali<br />
((a)): tale base passa da -70 dBm a -30 dBm, ritornando a -70<br />
dBm una volta generate le armoniche frazionali.<br />
Mentre nelle sottofigure (a) e (d) è evidente che si tratti di<br />
rumore spettrale, nelle figure (b) e (c) sorge il dubbio che si tratti<br />
di un fenomeno più complesso.<br />
Questo può essere spiegato attraverso la fenomenologia di un<br />
processo a catena: una volta generatasi la componente a ω/2, ne<br />
consegue la generazione di una componente a ω/4 e di un’altra a<br />
ω/2, da cui consegue la generazione di una componente a ω/8 e a<br />
ω/4 e così, fino a raggiungere uno spettro in frequenza continuo.<br />
Partendo dalla teoria del caos, attraverso le funzionalità del-<br />
l’oscilloscopio descritto nella Catena di Misura, è stata eseguita<br />
un’analisi nello spazio delle fasi delle serie temporali delle ampiezze<br />
di vibrazione ottenute dal campionamento del segnale rilevato<br />
tramite il sistema interferometrico; nelle figure 5.1, 5.2 e 5.3 sono<br />
riportati gli spazi delle fasi rilevati nelle tre fasi delle generazione<br />
delle armoniche frazionali. Vengono riportati sull’asse x(t) la<br />
vibrazione rilevata al variare del tempo e su x(t + n) la stessa<br />
vibrazione con un opportuno ritardo di fase [23], [24].<br />
Le figure 5.1 e 5.3 sono relative ai segnali rilevati in corrispon-<br />
denza di ampiezza della fondamentale rispettivamente al di sotto<br />
e al di sopra della soglia, mentre la figura 5.2 corrisponde allo
x(t+n)<br />
x(t+n)<br />
0.5<br />
0.0<br />
-0.5<br />
-1.0<br />
0.3<br />
0.2<br />
0.1<br />
0.0<br />
-0.1<br />
-0.2<br />
-0.2 -0.1 0.0 0.1 0.2<br />
x(t)<br />
Figura 5.1: Spazio delle Fasi sotto soglia.<br />
-0.95 -0.70 -0.45 -0.20 0.05 0.30 0.55 0.80<br />
x(t)<br />
Figura 5.2: Spazio delle Fasi all’avvicinarsi della soglia.<br />
107<br />
spazio delle fase del segnale rilevato in prossimità della soglia per<br />
la generazione delle armoniche frazionali.<br />
E’ evidente come prima e dopo la soglia i punti delle curve<br />
nello spazio delle fasi sono posti lungo curve continue, il rumore<br />
(a -70 dBm) non causa un loro eccessivo scostamento, mentre
x(t+n)<br />
1.4<br />
0.9<br />
0.4<br />
-0.1<br />
-0.6<br />
-1.1<br />
-1.5 -1.0 -0.5 0.0 0.5 1.0<br />
x(t)<br />
Figura 5.3: Spazio delle Fasi sopra soglia.<br />
108<br />
in prossimità della soglia si verifica una maggiore dispersione dei<br />
punti, che non sono più riconducibili a una sola curva.<br />
A questo punto, è lecito supporre che in queste fasi del fenomeno<br />
di generazione delle armoniche frazionali siano presenti vibrazioni<br />
di tipo caotico. Al fine di arrivare a risposte certe su questo punto<br />
interrogativo sarà necessario svolgere i seguente punti:<br />
• Effettuare un’accurata analisi delle serie temporali del segnale<br />
di vibrazione rilevato dall’interferomentro, che attraverso al-<br />
goritmi numerici (come ad esempio il metodo del box counting<br />
[25]) indichino se tali vibrazioni non lineari hanno carattere<br />
caotico;<br />
• Definire un modello analitico che descriva il comportamento<br />
delle vibrazioni caotiche;<br />
• Effettuare ulteriori misure sperimentali che diano ulteriore
109<br />
conferma del carattere caotico del fenomeno in esame e della<br />
correttezza del modello analitico sviluppato.
Bibliografia<br />
[1] D. Royer, E. Dieulesaint, Elastic Waves in Solids I, Springer-Verlag Berlin<br />
Heidelberg, 2000.<br />
[2] L. Landau, M. Lifshitz, Theory of Elasticity, Pergamon Press, 1986.<br />
[3] W. G. Cady, Pizoelectricity, McGraw-Hill Book Company, Inc., New York,<br />
1964.<br />
[4] Publication and Proposed Revision of ANSI/IEEE Standard 176-<br />
1987 ”ANSI/IEEE Standard on piezoelectricity”, IEEE Transactions on<br />
Ultrasonics, Ferroelectrics, and Frequency Control, Vol. 43, No. 5, Sept.<br />
1996.<br />
[5] W. Lu, D.-N. Fang, C. Q. Li, K.-C. Hwang, Nonlinear electric-mechanical<br />
Behavior and micromechanics modelling of ferroelectric domain evolution,<br />
Acta materialia, Vol. 47, No. 10, pp. 2913-2926, 1999.<br />
[6] J. Fan, W. A. Stoll, C. S. Lynch, Nonlinear constitutive behavior of soft<br />
and hard PZT: experiments and modelling, Acta materialia, Vol. 47, No.<br />
17, pp. 4415-4425, 1999.<br />
[7] J. Blitz, Ultrasonics methods and applications, Butterworths, London,<br />
1971.<br />
[8] L. E. Kinsler, A. R. Frey, A. B. Coppens, J. V. Sanders, Fundamentals of<br />
acoustics, John Wiley & Sons, Inc., New York, 1982.<br />
[9] D. Sette, A. Alippi, Lezioni di fisica, Vol. I, Masson, Milano, 1998.
BIBLIOGRAFIA 111<br />
[10] I. A. Viktorov, Rayleigh and Lamb Waves, Plenum Press, New York, 1967.<br />
[11] R. W. Morse, Compressional Waves along an Anisotropic Circular<br />
Cylinder Having Hexagonal Symmetry, Journal of the Acoustical Society<br />
of America, Vol. 26, No. 6, Nov. 1954.<br />
[12] D. C. Gazis, Three-Dimensional Investigation of the Propagation of Waves<br />
in Hollow Circular Cylinders, I. Analytical Foundation, II. Numerical<br />
Results, Journal of the Acoustical Society of America, Vol. 31, No. 5,<br />
Nov. 1959.<br />
[13] I. Mirsky, Wave Propagation in Transversely Isotropic Circular Cylinders,<br />
Part I: Theory, Part II: Numerical Results, Journal of the Acoustical<br />
Society of America, Vol. 37, No. 6, pp. 1016-1026, June 1965.<br />
[14] C. Prasad, R. K. Jain, Vibrations of Transversely Isotropic Cylindrical<br />
Shells of Finite Lenght, Journal of the Acoustical Society of America, Vol.<br />
38, 1965.<br />
[15] M. Angelici, M. Albino, A. Alippi, and A. Bettucci Nonlinear Vibrations<br />
of Piezoelectric Cylinders, in IV Young Researchers Conference, Wave<br />
Electronics and Its Applications, San Pietroburgo, Russia, 28-31 maggio<br />
2001.<br />
[16] A. Alippi, M. Angelici, A. Bettucci, and M. Germano Surface Mapping<br />
of Nonresonant Harmonic and Subharmonic Generated Modes in Finite<br />
Piezoelectric Structures, in 16th International Symposium on Nonlinear<br />
Acoustic, Edited by O.V. Rudenko and O. A. Sapozhnikov, pages 759-762,<br />
Moscow, 2003.<br />
[17] A. Alippi, M. Angelici, A. Bettucci, and M. Germano Generation of Frac-<br />
tional Harmonic and Subharmonic in Piezoelectric Hollow Cylinders, in<br />
17th ICA, Roma, Italia, 2-7 settembre 2001.<br />
[18] A. Alippi, M. Albino, M. Angelici, A. Bettucci, and M. Germano Space<br />
Distribution of Harmonic Mode Vibration Amplittudes in Nonlinear Fi-
BIBLIOGRAFIA 112<br />
nite Piezoelectric Transducers, proposto per la pubblicazione all’editore di<br />
Ultrasonics.<br />
[19] A. Alippi, M. Angelici, A. Bettucci, and M. Germano Nonresonant Subhar-<br />
monic Mode Generation in Non Linear Vibration Piezoelectric Structures,<br />
proposto per la pubblicazione all’editore di Physical Review Letters.<br />
[20] Meirovitch L., Elements of vibration analysis, Mcgraw-Hill International<br />
Editions, New York, 1986.<br />
[21] A. Alippi, A. Bettucci, M. Germano, Generation of Fractional<br />
Harmonics Frequency Pair in an Electrically Excited Piezoelectric Tube,<br />
CP524, Nonlinear Acoustic at the Turn of the Millennium: ISNA 15.<br />
[22] D. W. Jordan, and P. Smith, Nonlinear ordinary differential equations,<br />
Clarendon Press, Oxford, 1977.<br />
[23] C. Hayashi, Nonlinear Oscillations in Physical Systems, Princeton<br />
University Press, Princeton, 1985.<br />
[24] Francis C. Moon, Chaotic and Fractal Dynamics, John Wiley & Sons,<br />
1992.<br />
[25] H. Kantz, T. Schreiber, Nonlinear Time Series Analysis, Cambridge<br />
University Press, 1997.