8. Előadás: Munkatételek
8. Előadás: Munkatételek
8. Előadás: Munkatételek

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
<strong>8.</strong> <strong>Előadás</strong>: <strong>Munkatételek</strong> 1 , felcserélhetőségi tételek<br />
Ismétlés<br />
A különböző típusú munkafogalmak definiálását illetve a hozzájuk kapcsolódó munkatételek<br />
(virtuális 2 erők és elmozdulások tétele) megfogalmazását a BSc Szilárdságtan tárgy már<br />
megtette. Emlékeztetőül a (kis alakváltozású rendszerekre) már korábban felírt két tétel (a<br />
koncentrált dinámok hatását a továbbiakban az egyszerűség kedvéért elhagyjuk):<br />
a./ Virtuális elmozdulások tétele:<br />
Egy erőrendszer akkor és csakis akkor statikailag lehetséges, ha bármely virtuális<br />
elmozdulás-rendszeren végzett munkája zérus. Más megfogalmazásban:<br />
egyensúlyban levő erőrendszer által végzett virtuális munkák összege zérus:<br />
δ W<br />
ahol<br />
= δ Wk + δ Wb<br />
= 0 , (<strong>8.</strong>1)<br />
δ W = t ⋅δ u dA + g ⋅δ u dV , g = ρb<br />
k<br />
∫ ∫ (külső virtuális munka), (<strong>8.</strong>2)<br />
St V<br />
δ δW b = − ∫ σσ<br />
σ : δ ε dV (belső virtuális munka). (<strong>8.</strong>3)<br />
V<br />
A virtuális elmozdulások tétele az erőrendszerek egyensúlyának szükséges és<br />
elégséges feltétele. A tétel bármilyen anyagú szilárd testre érvényes. Az<br />
egyenletekben t a felületi, g pedig a térfogati erőket jelenti.<br />
b./ Virtuális erők tétele:<br />
Egy elmozdulás-rendszer akkor és csakis akkor geometriailag lehetséges, ha bármely<br />
virtuális erőrendszeren végzett kiegészítő munkája zérus. Más megfogalmazásban:<br />
kompatibilis elmozdulásrendszer által végzett virtuális kiegészítő munkák összege<br />
zérus:<br />
δ W% ahol<br />
= δ W% k + δ W%<br />
b = 0 , (<strong>8.</strong>4)<br />
δ W% = u ⋅δ t dA + u ⋅δ g dV , g = ρb<br />
(külső virtuális kiegészítő munka), (<strong>8.</strong>5)<br />
k<br />
∫ ∫<br />
St V<br />
δ W% = − ε : δσ<br />
dV<br />
b<br />
∫<br />
V<br />
(belső virtuális kiegészítő munka). (<strong>8.</strong>6)<br />
A virtuális erők tétele az elmozdulások és alakváltozások kompatibilitásának<br />
szükséges és elégséges feltétele. Bármilyen anyagú szilárd testre érvényes, amely kis<br />
elmozdulást végez.<br />
1 A „mechanikai munka” elnevezést először Gaspard-Gustave de Coriolis (1792 – 1843) francia<br />
matematikus és gépészmérnök használta (Coriolis: „Calcul de l'Effet des Machines”, Párizs, 1829).<br />
2 A „Függelék”-ben rövid összefoglaló olvasható a variációszámítás alapvető definícióiról illetve a<br />
virtuális elmozduláshoz kapcsolódó kommentárokról. Javasoljuk ennek tanulmányozását.<br />
10.06.22. 1
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Nagy alakváltozások esetén a virtuális elmozdulások tétele mechanikai jelentését tekintve<br />
nem, de egyes változóit tekintve formálisan módosul. A módosítás attól függ, hogy<br />
Lagrange-, vagy Euler-rendszerben írjuk fel az alapvető egyenleteket.<br />
A virtuális elmozdulások tétele 3 Euler-bázisban<br />
Az előző előadásban az alapvető egyenletek erős és gyenge alakjának elemzésekor<br />
bemutattuk, hogy az Euler-bázisban a megmaradási egyenletekből a virtuális teljesítmények<br />
elvének nevezett variációs elvhez jutunk. Ez az elv a nemlineáris végeselemes számításoknál<br />
kiválóan megfelel az igen gyors változásokkal járó áramlástani feladatok (folyadékok, gázok)<br />
vizsgálatánál. Olyan – szilárd testeket vizsgáló – mechanikai feladatoknál azonban, ahol<br />
mindenképpen szükséges az Euler-féle leírásmód (például nagyon nagy alakváltozásokkal –<br />
gyűrődésekkel – járó terhelések vizsgálatakor), előnyösebb az impulzus-megmaradási<br />
feltételből kiinduló átalakítást nem a sebességmező, hanem az elmozdulásmező variálásával<br />
végrehajtani, és így a – Lagrange-leírásmódnál is felhasznált – virtuális munkák tételét<br />
létrehozni ebben a bázisban. Ennek az átalakítás-variációnak nincs elvi akadálya, hiszen a<br />
variációs feladat létrehozásánál nincs semmilyen megkötés a tesztfüggvény típusára.<br />
Bár a virtuális elmozdulások elméleti alapjaival már a BSc Szilárdságtanban részletesen<br />
foglalkoztunk, most tekintsük át újból a fontosabb jellemzőket, illetve azokat a<br />
sajátosságokat, amelyek a nagy változások leírásmódjához kapcsolódnak.<br />
<strong>8.</strong>1. ábra: Kezdeti és pillanatnyi konfiguráció<br />
3 A virtuális elmozdulások tételét elsőként a kiváló svájci matematikusok, Johann Bernoulli (1667 –<br />
1748) és fia, Daniel Bernoulli (1700 – 1782) fogalmazták meg. Johann Bernoulli a francia Pierre<br />
Varignon-nak írt, 1715. február 26-i keltezésű levelében írt először virtuális elmozdulásrendszerekről<br />
és azok mechanikai alkalmazásairól (Varignon: „Nouvelle Mécanique”, Vol. 2, pp.<br />
174, Párizs,1725). Fia főleg a variációs elv alkalmazásaival járult hozzá a módszer<br />
népszerűsítéséhez. Ő hívta fel egyébként Euler figyelmét erre a mechanikai modellezési lehetőségre.<br />
Megjegyezzük, hogy magát a „virtuális elmozdulás” elnevezést először Lagrange (róla lásd az első<br />
előadás 4. lábjegyzetét) használta (Lagrange: „Mecanique Analytique”, 1788, Párizs).<br />
10.06.22. 2
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Magának a virtuális elmozdulásnak a definíciója nem változik a nemlineáris feldatok<br />
esetében sem. A (<strong>8.</strong>1) ábrán látható kezdeti és pillanatnyi (de időben rögzített!) konfigurációt<br />
felhasználva a pillanatnyi konfiguráció kicsiny megváltoztatásával állítjuk elő a virtuális<br />
elmozdulásrendszert:<br />
)<br />
δ u = u − u = εw<br />
, (<strong>8.</strong>7)<br />
ahol ε kicsiny, nullához tartó paraméter. Írjuk fel most az elmozdulás-variáció gradiensszámításához<br />
szükséges alapvető képleteket:<br />
) )<br />
∇ δ u = ∇u − ∇u, δ ∇ u = ∇u − ∇u ⇒ δ ∇ u = ∇ δu<br />
.<br />
(<strong>8.</strong>8)<br />
( ) ( ) ( ) ( )<br />
Ha figyelembe vesszük 4 , hogy<br />
∇ u = ∇ uF ⇔<br />
∂ui ∂ui<br />
= F<br />
0<br />
−1 −1<br />
∂x j ∂X<br />
k<br />
k j<br />
∂δui ∂δui<br />
∇ δ u = ∇0 δu F ⇔ = F<br />
∂x ∂X<br />
−1 −1<br />
akkor ( ) ( )<br />
j k<br />
, (<strong>8.</strong>9)<br />
10.06.22. 3<br />
k j<br />
. (<strong>8.</strong>10)<br />
A mechanikai feladatoknál szükség lehet a deformációgradiens-tenzor, illetve az adott bázis<br />
jellemzőjének tartott alakváltozás-tenzor (jelen esetben az Almansi-Hamel-féle tenzor)<br />
variációjának ismeretére is. Írjuk fel most ezeket 5 :<br />
( ) ( u<br />
-1 −1 ∂ δu<br />
∂ δ<br />
i −1 −1 j )<br />
δ F = ∇0 ( δu) , δ F = −F ∇( δu) ⇔ δ Fik = , δ Fk i = −Fk<br />
j . (<strong>8.</strong>11)<br />
∂X k ∂xi<br />
Az Almansi-Hamel-tenzor variációjának számítását megkönnyíti a Green-Lagrange-féle<br />
alakváltozástenzor variációjának ismerete. Számítsuk ki először ezt 6 :<br />
1 T T 1 T<br />
T<br />
T<br />
δ E = ⎡ ( F ) F F F⎤ ⎡( F 0( u) ) F 0(<br />
u)<br />
⎤<br />
2 ⎣<br />
δ + δ<br />
⎦<br />
= ∇ δ + ∇ δ , (<strong>8.</strong>12)<br />
2 ⎢⎣ ⎥⎦<br />
majd ennek felhasználásával az Almansi-Hamel-tenzort:<br />
−T −1 1 −T T<br />
−1<br />
δ e = F δ EF = ( F ( ∇0 ( δ u) ) + ∇0 ( δ u) F ) =<br />
2<br />
. (<strong>8.</strong>13)<br />
1 T 1 ⎛ ∂δu j ∂δu<br />
⎞<br />
i<br />
= ( ( ∇( δ u) ) + ∇( δu) ) ⇔ δ ei<br />
j = ⎜ +<br />
2 2 ⎜<br />
⎟<br />
∂xi ∂x<br />
⎟<br />
⎝ j ⎠<br />
Az alapvető variációs változatok megadása után a gyenge alak felírásához ugyanazokat a<br />
lépéseket hajtjuk végre, mint az előző előadásban a virtuális teljesítmény elvének<br />
megfogalmazásakor, de ahogy a bevezetőben említettük, most nem sebesség, hanem<br />
elmozdulás-variációt alkalmazunk. Megjegyezzük, hogy a vizsgált pillanatnyi<br />
konfigurációhoz tartozó perem- és kezdeti feltételek 7 ugyanazok, mint amiket a korábbiakban<br />
alkalmaztunk:<br />
Peremfeltételek: u = u az Su tartományon, t = t az St<br />
tartományon.<br />
Kezdeti feltételek (nulla időpontban a tartomány egészére vonatkoznak):<br />
u x, t = u X , u& x, t = u& X .<br />
( ) ( ) ( ) ( )<br />
t= 0 0 t=<br />
0 0<br />
4 A fontosabb képleteket indexes alakban is megadjuk. Emlékeztetőül a vektormezőkre – általunk<br />
használt – gradiens definíció: ( )<br />
grad u u T<br />
= ∇ ⊗ (lásd a Függelék vonatkozó részét).<br />
5 −1 −1 −1 −1 −1 −1 −1<br />
A második képlethez: ( F F I) F F FF F ( u) F F ( u)<br />
δ − ⇒ δ = − δ = − ∇ δ = − ∇ δ .<br />
6 1 ⎛ ∂uk ∂u<br />
⎞<br />
k<br />
Ezt is felírjuk indexes változatban: δ Ei j = ⎜ Fk j + Fk<br />
i ⎟ .<br />
2 ⎜ ∂X i ∂X<br />
⎟<br />
⎝ j ⎠<br />
7<br />
Kezdeti feltételeknek most elmozdulási és sebesség-értékeket választottunk.<br />
0
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Nem ismételjük meg harmadszor is a mozgásmennyiség megmaradási tételére épülő<br />
átalakítás-sorozatot, csak a végeredményt adjuk meg ( g = ρ b ):<br />
( ) ( )<br />
∫ ∫<br />
⎡⎣ σ : ∇ δu − g − ρu&& ⋅δu⎤⎦ dV − t ⋅δ u dS = 0 . (<strong>8.</strong>14)<br />
V St<br />
Ez az egyenlet tovább finomítható, ha az elmozdulás-variáció gradiense helyett az Almansi-<br />
Hamel-féle alakváltozás-tenzor variációjának értékét írjuk be a képletbe 8 :<br />
⎡⎣ σ : δe − ( g − ρu&& ) ⋅δu⎤⎦ dV − t ⋅δ u dS = 0 . (<strong>8.</strong>15)<br />
∫ ∫<br />
V St<br />
Ez a kifejezés az Euler-bázisban megfogalmazott virtuális munkatétel, vagy más néven a<br />
nagy változásokat leíró pillanatnyi konfigurációra vonatkozó virtuális elmozdulások<br />
tétele. A kis elmozdulásoknál felírt változathoz hasonlóan ez a megfogalmazás is független<br />
az anyagi viselkedéstől, tehát bármilyen anyag esetében alkalmazható.<br />
A virtuális elmozdulások tétele Lagrange-rendszerben<br />
Lagrange-rendszerben már az előző fejezetben megadtunk egy lehetséges felírási módot.<br />
Most az előírt felületi erők alakját kicsit egyszerűsítjük egyetlen formális integrállá, és a<br />
néhány sorral korábban az Euler-rendszerre jellemző alakot használjuk a könnyebb<br />
összehasonlíthatóság végett:<br />
T ⎡<br />
⎣P : δF − ( g0 − ρ0u&& ) ⋅δu⎤ ⎦ dV0 − t0 ⋅δ u dS0<br />
= 0.<br />
(<strong>8.</strong>16)<br />
∫ ∫<br />
V0 St0<br />
Ugyanez az egyenlet a második Piola-Kirchhoff-féle feszültségtenzor segítségével is<br />
megadható 9 :<br />
⎡⎣ S : δE − ( g0 − ρ0u&& ) ⋅δu⎤⎦ dV0 − t0 ⋅δ u dS0<br />
= 0<br />
(<strong>8.</strong>17)<br />
∫ ∫<br />
V0 St0<br />
ahol S a második Piola-Kirchhoff-féle feszültség-, E pedig a Green-Lagrangealakváltozástenzor.<br />
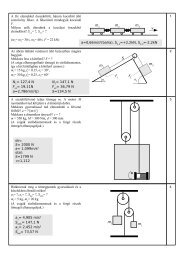
<strong>8.</strong> 1 Példa<br />
Vizsgáljuk meg a virtuális elmozdulások tételének segítségével egy tehermentes állapotában<br />
L oldalhosszúságú (homogén, izotrop, lineárisan rugalmas anyagú) kocka triaxiális terhelés<br />
hatására kialakuló mechanikai állapotát. A felületi terhelés intenzitása a három tengely<br />
, p és p p , az új (egyelőre ismeretlen) oldalhosszakat jelöljük<br />
irányában 1 2 3<br />
1 L, η2<br />
L és η3L<br />
η -lel. A változások tetszőlegesen nagyok lehetnek.<br />
A tömeg- és tehetetlenségi erőket elhanyagoljuk, az anyagállandókat (E, G, ν ) ismerjük. A<br />
tételt most Lagrange-rendszerben írjuk fel.<br />
A mozgásokat leíró alapegyenletek és a kezdeti feltételek:<br />
8<br />
A (<strong>8.</strong>14)-es egyenlet átalakításánál figyelembe vettük az elmozdulásgradiens-tenzor szimmetrikus<br />
és antimetrikus tenzorok összegére való felbonthatóságát, továbbá azt a tényt, hogy a szimmetrikus<br />
Cauchy-féle feszültségtenzornak az antimetrikus tenzorral való kétpont-szorzata zérus.<br />
9<br />
A transzformáció az első Piola-Kirchoff-tenzor átalakításából is kiindulhat, de felhasználhatjuk a<br />
σ : δ e dV = S : δ E dV0<br />
összefüggést is, közvetlenül az Euler-féle alakból kiindulva.<br />
10.06.22. 4
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
x1<br />
= η1X<br />
1,<br />
x2<br />
= η2<br />
X 2 , x3<br />
= η3<br />
X 3 ⇒ u1<br />
= x1<br />
− X 1,<br />
u2<br />
= x2<br />
− X 2 , u3<br />
= x3<br />
− X 3<br />
u = ( η −1)<br />
X , u = ( η −1)<br />
X , u = ( η −1)<br />
X .<br />
1<br />
<strong>8.</strong>2. ábra:<br />
A kocka térfogatváltozása<br />
1<br />
1<br />
2<br />
2<br />
u 1 ( X 1 = 0)<br />
= 0,<br />
u2<br />
( X 2 = 0)<br />
= 0,<br />
u3<br />
( X 3 =<br />
2<br />
3<br />
10.06.22. 5<br />
3<br />
Számítsuk ki először a mozgásegyenletek segítségével a Green-Lagrange<br />
alakváltozás tenzor elemeit (megjegyezzük, hogy a főértékek most megegyeznek a<br />
nemzérus komponensekkel) :<br />
E<br />
11<br />
3<br />
0)<br />
2<br />
1 2<br />
= E1<br />
= ( η1<br />
−1)<br />
, E22<br />
= E2<br />
= ( η2<br />
−1)<br />
, E33<br />
2<br />
2<br />
= E<br />
E = E = E = 0 .<br />
1 2<br />
3<br />
3<br />
12<br />
23<br />
31<br />
=<br />
0.<br />
1<br />
= ( η<br />
2<br />
−1)<br />
,<br />
A virtuális elmozdulások tételének Lagrange-rendszerben való felírásához a Green-<br />
Lagrange-tenzor mellett még szükségünk van a második Piola-Kirchhoff-tenzor<br />
elemeire. Ezeket a – fizikai tartalmú – Cauchy-feszültségtenzor segítségével írjuk fel:<br />
A gradiens-tenzor és inverze:<br />
⎡ 1 ⎤<br />
⎢ 0 0 ⎥<br />
η1<br />
⎡η1 0 0 ⎤ ⎢ ⎥<br />
−1<br />
⎢ 1 ⎥<br />
F =<br />
⎢<br />
0 2 0<br />
⎥<br />
⎢<br />
η<br />
⎥<br />
, F = ⎢ 0 0 ⎥ , J = η1η2η3 .<br />
η2<br />
⎢ 0 0<br />
⎢ ⎥<br />
⎣ η ⎥ 3 ⎦ ⎢ 1 ⎥<br />
⎢ 0 0 ⎥<br />
⎣ η3<br />
⎦<br />
Innen:<br />
η2η3 η3η1 η1η2 S11 = S1 = σ 1, S22 = S2 = σ 2 , S33 = S3<br />
= σ3<br />
,<br />
η1 η2 η3<br />
ahol felhasználtuk a korábban levezetett (lásd a negyedik előadást)<br />
−1 −T<br />
S = J F σ F<br />
összefüggést. Megjegyezzük, hogy most a feladat sajátossága miatt kicsit tömörebben<br />
is kiszámíthatók a második Piola-Kirchhoff-tenzor elemei. Először megadjuk a<br />
jelenlegi helyzetnek megfelelő determináns-számítás másféle változatát:<br />
⇒
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
dV 0<br />
J = = ,<br />
dV0<br />
ρ<br />
ρ<br />
majd ezt felhasználva indexes alakban írjuk fel az átváltást:<br />
ρ0 ∂X<br />
∂X<br />
i j<br />
S ji = σl<br />
k .<br />
ρ ∂xk ∂xl<br />
A feladat eredménye (elemekre bontva a számításból adódó értékeket):<br />
2<br />
ρ0<br />
⎛ dX 1 ⎞<br />
S 11 = S1<br />
= ⎜<br />
⎟<br />
ρ ⎝ dx1<br />
⎠<br />
dV<br />
σ1<br />
=<br />
dV0<br />
1<br />
2<br />
η1<br />
η1η2η<br />
3<br />
= σ 2<br />
η1<br />
η3η1<br />
S 22 = S 2 = σ 2 , S33<br />
η<br />
η1η2<br />
= S3<br />
= σ3<br />
.<br />
η<br />
2<br />
10.06.22. 6<br />
3<br />
1<br />
η2η<br />
=<br />
η<br />
Következő lépésként magukat a Cauchy-feszültségeket kell meghatároznunk. Ehhez a<br />
számításához szükségünk lesz az Almansi-Hamel-féle alakváltozás tenzorra is, ez<br />
azonban kifejezhető a Green-Lagrange-féle alakváltozás tenzor segítségével. A<br />
kétféle alakváltozás-tenzor kapcsolatát a gradiens-tenzor felhasználásával lehet<br />
megadni:<br />
1 T<br />
1 -T<br />
-1 1 T -T<br />
-1<br />
E = ( F ⋅ F - I)<br />
és e = ( I - F ⋅ F ) ⇒ e = ( F ⋅ F - F ⋅ F ) − E .<br />
2<br />
2<br />
2<br />
A deformáció-gradiens tenzort már az előbb felírtuk, így az Almansi-Hamel-tenzor<br />
három nemzérus eleme egyszerűen számítható:<br />
1 2 1 1 2 1<br />
e11 = e1 = ( η 2 1 − 1) = E 2 1, e22 = e2 = ( η 2 2 − 1) = E 2 2,<br />
2η1 η1 2η2<br />
η2<br />
1 2 1<br />
e33 = e3 = ( η 2 3 − 1) = E 2 3 .<br />
2η3<br />
η3<br />
A Cauchy-tenzor elemeit ezek után a Hooke-féle anyagmodell segítségével kapjuk,<br />
mivel lineárisan rugalmas anyagi viselkedést tételeztünk fel a modellről. A Hookemodell<br />
egyenletei itt is érvényesek, hiszen most az anyagi linearitást a nagy<br />
alakváltozásokra is kiterjesztettük:<br />
E ⎡ ν<br />
⎤ E ⎡ ν<br />
⎤<br />
σ1 =<br />
1 ( 1 2 3)<br />
, 2<br />
2 ( 1 2 3)<br />
,<br />
1 ⎢<br />
e + e + e + e σ =<br />
1 2<br />
⎥ 1 ⎢<br />
e + e + e + e<br />
+ ν<br />
+ ν 1 2<br />
⎥<br />
⎣ − ν<br />
⎦ ⎣ − ν<br />
⎦<br />
E ⎡ ν<br />
⎤<br />
σ 3 =<br />
⎢<br />
e3<br />
+ ( e1<br />
+ e2<br />
+ e3<br />
)<br />
1+<br />
ν<br />
⎥<br />
.<br />
⎣ 1−<br />
2ν<br />
⎦<br />
Helyettesítsük be a Cauchy-feszültségekre kapott értékeket a (második) Piola-<br />
Kirchhoff-feszültségek számítására levezetett összefüggésekbe és írjuk be ide az<br />
Almansi-Hamel-féle alakváltozásokra kapott eredményeket is:<br />
η2η3 E ⎡ 1 ν ⎛ 1 1 1 ⎞⎤<br />
S1 = ⎢ E 2 1 + ⎜ E 2 1 + E 2 2 + E 2 3 ⎟⎥<br />
,<br />
η 1 1+ ν ⎣η1 1− 2ν<br />
⎝ η1 η2 η3<br />
⎠⎦<br />
η1η3 E ⎡ 1 ν ⎛ 1 1 1 ⎞⎤<br />
S2 = ⎢ E 2 2 + ⎜ E 2 1 + E 2 2 + E 2 3 ⎟⎥<br />
,<br />
η 2 1+ ν ⎣η2 1− 2ν<br />
⎝ η1 η2 η3<br />
⎠⎦<br />
η2η2 E ⎡ 1 ν ⎛ 1 1 1 ⎞⎤<br />
S3 = ⎢ E 2 3 + ⎜ E 2 1 + E 2 2 + E 2 3 ⎟⎥<br />
.<br />
η 3 1+ ν ⎣η3 1− 2ν<br />
⎝ η1 η2 η3<br />
⎠⎦<br />
1<br />
3<br />
σ<br />
1<br />
,
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Írjuk be most E helyére a nyírási rugalmassági modulust, a Green-Lagrangealakváltozások<br />
helyére pedig azok részletes értékét:<br />
η2η3 G ⎡ 1− ν ⎛ 1 1 ⎞⎤<br />
S1<br />
= ⎢1 + ν − − ν ,<br />
2 ⎜ + 2 2 ⎟⎥<br />
η1 1− 2ν<br />
⎣ η1 ⎝ η2 η3<br />
⎠⎦<br />
η1η3 G ⎡ 1− ν ⎛ 1 1 ⎞⎤<br />
S2<br />
= ⎢1+ ν − − ν 2 ⎜ + 2 2 ⎟⎥<br />
,<br />
η2 1− 2ν<br />
⎣ η2 ⎝ η1 η3<br />
⎠⎦<br />
η2η1 G ⎡ 1− ν ⎛ 1 1 ⎞⎤<br />
S3<br />
= ⎢1+ ν − − ν 2 ⎜ + 2 2 ⎟⎥<br />
.<br />
η3 1− 2ν<br />
⎣ η3 ⎝ η2 η1<br />
⎠⎦<br />
A belső virtuális munka számításához szükséges kifejezés:<br />
S ⋅δE = S1δ E1 + S2δ E2 + S3δ E3<br />
, ahol δ E1 =η1 δη1 A teljes térfogati integrál ezek után:<br />
, δ E2 = η2 δη2 , δ E3<br />
= η3 δη 3 .<br />
− S ⋅δ E dV = − S δ E + S δ E + S δE<br />
3<br />
L .<br />
∫<br />
V0<br />
( )<br />
0 1 1 2 2 3 3<br />
A külső virtuális munka integráljának számításához az alábbi egyenleteket kell<br />
figyelembe venni:<br />
δ u = X δη , δ u = X δη , δ u = X δη ,<br />
1 1 1 2 2 2 3 3 3<br />
q = − p , q = − p , q = − p ,<br />
(1) (2) (3)<br />
1 2 3<br />
A<br />
q = q = − η η p , q = − η η p , q = −η η p .<br />
(1) (1) (2) (3)<br />
0<br />
A0<br />
2 3 1 0 3 1 2 0 1 2 3<br />
A külső virtuális munka ezeknek megfelelően:<br />
(1) (1)<br />
q δ u dA +<br />
(2) (2)<br />
q δ u dA +<br />
(3) (3)<br />
q δ u dA<br />
3<br />
= L<br />
(1) (2) (3)<br />
q δη + q δη + q δη<br />
∫ ∫ ∫<br />
( )<br />
0 1 0 0 1 0 0 1 0 0 1 0 2 0 3<br />
(1)<br />
A0 (2)<br />
A0 (3)<br />
A0<br />
A belső és külső virtuális munka összegének zérus voltát felhasználva:<br />
(1)<br />
−S η + q<br />
(2)<br />
δη + −S η + q<br />
(3)<br />
δη + −S η + q δη = .<br />
( ) ( ) ( )<br />
1 1 0 1 2 2 0 2 3 3 0 3 0<br />
Ennek a kifejezésnek bármilyen δη1 , δη2 , δη3 variációra teljesülnie kell, így a három<br />
zárójeles tag zérus voltát felhasználva három független nemlineáris egyenlethez<br />
jutunk. Ezekbe helyettesítsük be a II. Piola-Kirchhoff-feszültségekre illetve a felületi<br />
terhekre korábban kapott értékeket:<br />
G ⎡ 1− ν ⎛ 1 1 ⎞⎤<br />
⎢1 + ν − − ν p<br />
2 ⎜ + 2 2 ⎟⎥<br />
= − 1,<br />
1− 2ν<br />
⎣ η1 ⎝ η2 η3<br />
⎠⎦<br />
G ⎡ 1− ν ⎛ 1 1 ⎞⎤<br />
⎢1+ ν − − ν p<br />
2 ⎜ + 2 2 ⎟⎥<br />
= − 2 ,<br />
1− 2ν<br />
⎣ η2 ⎝ η1 η3<br />
⎠⎦<br />
G ⎡ 1− ν ⎛ 1 1 ⎞⎤<br />
⎢1+ ν − − ν p<br />
2 ⎜ + 2 2 ⎟⎥<br />
= − 3 .<br />
1− 2ν<br />
⎣ η3 ⎝ η2 η1<br />
⎠⎦<br />
Ebből a három ismeretlenes nemlineáris egyenletrendszerből határozható meg a<br />
η , η és η . Megjegyezzük, hogy az egyenletrendszer<br />
keresett 1 2 3<br />
1<br />
, 2<br />
η1<br />
1<br />
2<br />
η2<br />
1<br />
és 2<br />
η3<br />
ismeretlenjeit x,y és z paraméterekkel helyettesítve ez a feladat lineáris<br />
egyenletrendszerre vezethető vissza. A paraméteres megoldás zárt alakban is<br />
10.06.22. 7
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
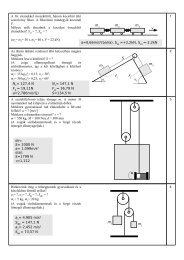
<strong>8.</strong>2. Példa<br />
felírható, de nehézkes volta miatt előnyben részesítik a numerikus esetekre<br />
alkalmazott számításokat.<br />
Ha a p1 = p2 = p3 = p hidrosztatikus állapotot vizsgáljuk, akkor η 1 = η 2 = η 3 = η és<br />
így az egyenletrendszer helyett egyetlen kifejezéssel van dolgunk:<br />
1+ ν ⎛ 1 ⎞<br />
G ⎜1− p<br />
2 ⎟ = − ,<br />
1− 2ν ⎝ η ⎠<br />
amelynek megoldása:<br />
1<br />
1 2(1 2 ) p<br />
η =<br />
.<br />
+ − ν<br />
E<br />
Ha a nyírási rugalmassági modulus helyett a K térfogatváltozási modulust 10<br />
használjuk anyagállandónak, akkor az alábbi összefüggéshez jutunk (lásd az alatta<br />
levő <strong>8.</strong>3-as ábrát):<br />
p 1 ⎛ 1 ⎞<br />
= ⎜ −1<br />
2 ⎟<br />
3K 2 ⎝ η ⎠ .<br />
<strong>8.</strong>3. ábra: A lineáris és a nemlineáris térfogatváltozás összehasonlítása<br />
Az ábrán látható lineáris közelítés úgy értelmezhető, mint az η − ra kapott képlet<br />
sorba fejtett kifejezése szerinti, a magasabb rendű tagokat elhanyagoló vizsgálat:<br />
p ⎡ 3 p ⎤<br />
1 − η= (1− 2 ν) 1 (1 2 ) ...<br />
E ⎢<br />
− − ν +<br />
⎣ 2 E ⎥<br />
⎦ .<br />
Megjegyezzük, hogy az η = 1 értékhez végtelen nagy térfogatváltozási-modulus és<br />
ν = 0,<br />
5 értékű Poisson-tényező tartozik.<br />
Vizsgáljuk meg, hogy hogyan lehet egy 1D nemlineáris feladat végeselemes modellezéséhez<br />
szükséges alapegyenleteket megadni a Lagrange-féle leírásmód alapján<br />
Az 1D szerkezet végeselemes számítását a Lagrange-féle leírásmódnál felírt virtuális<br />
X , X tartományban elhelyezkedő<br />
munkák tétele segítségével végezzük el. Az [ ]<br />
10<br />
A térfogatváltozási modulus a hidrosztatikus feszültség és térfogatváltozás közötti kapcsolatot<br />
fejezi ki. A rugalmassági modulus és a Poisson-tényező ismeretében a következőképpen számítható:<br />
K = E /(3 − 6 ν ) .<br />
10.06.22. 8<br />
a b
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
szerkezetet a végeselemes technikában szokásos módon e = 1,..., ne<br />
elemre osztjuk.<br />
Egy elemen m darab csomópontot veszünk fel, így összesen nN csomópontunk lesz.<br />
Az I-edik csomópont koordinátáját jelöljük I X -vel, az egy elemen belüli 1 ,<br />
e e<br />
⎡<br />
⎣X X ⎤ m ⎦<br />
tartományt pedig Ω e -vel.<br />
<strong>8.</strong>4. ábra. Az 1D szerkezet elemekre osztása<br />
Az egyszerűség kedvéért az „1”-es csomópont lesz az előírt elmozdulás perempontja<br />
és az n N jelű pont pedig az előírt feszültségeké (megjegyezzük, hogy a végeselemes<br />
technikában szokásos módon ezeket a peremfeltételeket majd csak a modellezés<br />
utolsó fázisában vesszük figyelembe).<br />
Az elmozdulásfüggvény és variációjának szokásos végeselemes közelítése:<br />
nN nN<br />
∑ ∑ ,<br />
u( X , t) = N ( X ) u ( t), δu( X ) = N ( X ) δu<br />
I I I I<br />
I = 1 I = 1<br />
ahol NI ( X ) a<br />
0<br />
C -folytonos bázisfüggvényeket, uI ( t ) pedig a csomóponti<br />
elmozdulásokat jelöli. A bázisfüggvényeknek most is ki kell elégíteniük az<br />
N ( X ) = δ feltételt. Fontos tudnunk, hogy a csomóponti változók mindig a t<br />
I J I J<br />
paraméter függvényei, még a kvázi-statikus feladatoknál is (t jelentheti a „valódi”<br />
időt, de lehet egy egyszerű monoton növekvő változó, például teherparaméter). Ettől<br />
csak a csomóponti virtuális elmozdulások esetében van eltérés, I u δ értékei nem<br />
függnek az időtől.<br />
A most bevezetett közelítések segítségével írjuk fel a virtuális munka egyes<br />
komponenseit (az 1D esetre itt felhasznált, nemlineáris hatásokat tartalmazó virtuális<br />
munkatételt korábban már részletesen levezettük!):<br />
Xb b = ∫ , X 0<br />
nN = ∑<br />
Xb<br />
I ∫ I , X 0<br />
nN<br />
= ∑ I<br />
b<br />
I =<br />
T b<br />
,<br />
X a<br />
I = 1 X a<br />
I = 1<br />
δW δu A P dX δu N A P dX δu f δ u f<br />
X n X ⎛ ⎞<br />
δW = δu ρ A b dX + δu A t = δu N ρ A dX + N A t = δ u f<br />
⎜ Γt<br />
⎟<br />
⎝ ⎠<br />
b N<br />
b<br />
0 0<br />
T k<br />
∫ 0 0 ( 0 ) ∑ ⎜ ∫ 0 0 ( 0 ) ⎟ ,<br />
k x I I I x<br />
X a Γt<br />
I = 1 X a<br />
Xb n X<br />
N b<br />
nN<br />
∫ ∑ ∫ ∑<br />
δ W = δu ρ A uɺɺ dX = δu N ρ A uɺɺ ( t) N dX = δ u M a =δu<br />
f .<br />
kin 0 0 I I 0 0 J J<br />
Xa I= 1 Xa<br />
J = 1<br />
T T kin<br />
A kinetikus virtuális munka képletében szereplő tömegmátrix képlete:<br />
I J<br />
Xb ∫ 0 0 I J<br />
Xb<br />
∫ 0 0<br />
T<br />
.<br />
Xa Xa<br />
M = ρ A N N dX vagy M = ρ A N N dX<br />
Az a vektor a gyorsulási jellemzőket tartalmazza ( a = uɺɺ).<br />
A virtuális munkatétel<br />
képletébe behelyettesítve ezeket az összefüggéseket, a következő egyenletrendszert<br />
kapjuk:<br />
10.06.22. 9
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
nN<br />
∑<br />
I=<br />
1<br />
b k kin<br />
( )<br />
δu f − f + f = 0, ∀δu −ra<br />
.<br />
I I I I<br />
Ez az egyenlet valóban mindig zérus, hiszen I=1-nél 1 u δ zérus a peremfeltételek<br />
miatt, míg a többi csomópontnál a zárójeles kifejezés lesz nulla. Elhagyva a<br />
tetszőleges virtuális elmozdulásfüggvényt, mátrix alakban a következő szemidiszkrét<br />
(a térben diszkrét, az időben azonban folytonos) egyenletrendszert írhatjuk fel:<br />
k b<br />
f = f − f = M a .<br />
Ezt a kifejezést a mozgás egyenletének hívják a mechanikában, és alapvető<br />
fontosságú a nemlineáris feladat végeselemes vizsgálatában. Az egyenletrendszerben<br />
az előírt elmozdulási peremfeltételt már figyelembe vettük. Matematikai jellegét<br />
tekintve nN − 1 darab másodrendű közönséges differenciálegyenletből áll,<br />
amelyeknek független változója a t idő- (vagy teher-) paraméter.<br />
Megjegyezzük, hogy a számításokban az M tömegmátrix gyakran nem diagonál (ezt<br />
hívják a mechanikában konzisztens tömegmátrixnak), így a mozgásegyenlet nem<br />
egyezik meg pontosan az f = M a alakú II. Newton-törvénnyel, mivel az I-edik<br />
csomópontnál levő erő is okozhat gyorsulást a J-edik csomópontnál.<br />
Fontos tudnunk, hogy ha a konzisztens tömegmátrix helyett diagonál felépítésű<br />
tömegmátrixot kívánunk használni, akkor a szakirodalomban ajánlott többféle<br />
lehetőség valamelyikét kell választanunk (lásd részletesebben a „Nemlineáris<br />
végeselemmódszer” című MSc tárgy vonatkozó fejezeteit).<br />
A fenti mozgásegyenlethez előírt kezdeti feltételeket legtöbbször a csomóponti<br />
elmozdulás-és sebességváltozók figyelembevételével adjuk meg:<br />
u (0) = u ( X ), ∀I − re, uɺ (0) = uɺ ( X ), ∀I −re<br />
.<br />
I 0 I I 0 I<br />
Megjegyezzük, hogy egy t = 0 pillanatban nyugalomban lévő és deformálatlan testnél<br />
ezek a kezdeti feltételek az u (0) = 0 és uɺ (0) = 0 ( ∀I −re)<br />
alakot öltik.<br />
I I<br />
Ha a kezdeti feltételek sokkal bonyolultabbak (például időben változó értékeket írunk<br />
elő), akkor a csomóponti elmozdulások és sebességek értékeinek a kezdeti adatokhoz<br />
történő illesztését a legkisebb négyzetek módszere segítségével külön ki kell<br />
számítanunk. Ilyenkor az u ( X ) kezdeti adathalmaz és a végeselemes interpolációból<br />
adódó ∑ NI ( X ) uI<br />
(0) értékek különbségének négyzetét minimalizáljuk:<br />
X<br />
b<br />
1 ⎛ ⎞<br />
M ( u( 0 ) ) = ⎜ uI (0) NI ( X ) −u0 ( X ) ⎟ ρ 0 A0 dX = min<br />
2 ∫ ⎜∑ ⎝<br />
⎟<br />
!<br />
⎟⎠<br />
Xa<br />
I<br />
A sűrűséget hagyományosan azért szokták beépíteni a fenti kifejezésbe, hogy a<br />
tömegmátrixot felhasználhassák a számításban. A minimumfeltételt alkalmazva a<br />
hibára a következőt kapjuk:<br />
Xb<br />
∂M<br />
⎡ ⎤<br />
= NK ( X ) ⎢ uI (0) NI ( X ) −u0 ( X ) ⎥ ρ 0 A0 dX = 0<br />
∂uK (0) ∫ ⎢∑ .<br />
⎥<br />
X<br />
I<br />
a ⎣ ⎦<br />
Ha itt felhasználjuk a tömegmátrix korábbi definícióját, akkor az egyenlet az alábbi<br />
alakra hozható:<br />
10.06.22. 10<br />
2
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
<strong>8.</strong>3 Példa<br />
M u(0) = g, ahol g = N ( X ) u ( X ) ρ A dX .<br />
0 0 0<br />
10.06.22. 11<br />
Xb<br />
∫<br />
K K<br />
Xa<br />
A kezdeti sebességek csomóponti értékeinek illesztését teljesen hasonló módon kell<br />
számítani.<br />
Mivel ennél a példánál az alapvető cél az volt, hogy a virtuális munkatétel<br />
segítségével illusztráljuk a végeselemes módszer használatát, nem térünk ki a<br />
gyakorlati számításoknál gyakrabban alkalmazott technikára, azaz az egy elem<br />
szintjén végzett műveletek végrehajtásának elemzésére. Erre vonatkozóan újból az<br />
előbb említett „Nemlineáris végeselemmódszer” című tárgyra hívjuk fel a figyelmet.<br />
Vizsgáljuk meg, hogy egy általános nemlineáris mechanikai feladatnál hogyan lehet a<br />
számítás iterációs algoritmusát megadni a virtuális elmozdulások tételével.<br />
Tételezzük fel, hogy az egyszerűség kedvéért most is kizárjuk a dinamikus hatásokat,<br />
de egyébként az alakváltozások jelen esetben is tetszőlegesek lehetnek (második<br />
Piola-Kirchhoff feszültségtenzort, Green-Lagrange alakváltozástenzort és Lagrange<br />
leírásmódot használunk).<br />
<strong>8.</strong>5. ábra:Iterációs algoritmus<br />
A terheket fokozatosan rakjuk rá a szerkezetre a fenti ábrán látható módon. Az ábrán<br />
látható P általános teherszimbólum, t pedig jelenthet időváltozót, de képviselhet<br />
valamilyen általános teherparamétert is. A példa további részében időparaméterként<br />
hivatkozunk rá. Az első időlépésben ∆ t1 = t1<br />
−t<br />
0 , ∆P1<br />
= P1<br />
− P0<br />
( a”0” indexű tagok<br />
általában zérus értékűek), egy általános lépésnél pedig<br />
t = t 1 −t<br />
, ∆P<br />
= P − P .<br />
∆ n n+<br />
n n n+<br />
1<br />
n
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
A számítás első lépése a t = t1<br />
= ∆ t1<br />
időértékhez tartozó elmozdulás, alakváltozás és<br />
feszültség kiszámítása:<br />
u1 = ∆u1<br />
, E1<br />
= ∆E1<br />
, S1<br />
= ∆S1<br />
.<br />
Egy általános lépésnél ezeknek a tagoknak a számítási módja az előzőekben említett<br />
változókéhoz hasonló módon történik:<br />
u = u + ∆ u , E = E + ∆ E , S = S + ∆ S .<br />
n+ 1 n n+ 1 n+ 1 n n+ 1 n+ 1 n n+<br />
1<br />
Az ismeretlen ∆ u n+<br />
1 , ∆En+<br />
1 , ∆S<br />
n+<br />
1 véges növekmények számítására a virtuális<br />
elmozdulások tételét hívjuk segítségül 11 :<br />
− S : δ E dV +<br />
∗<br />
g ⋅δ u dV +<br />
( n)<br />
t ⋅δ u dS =<br />
∫ ∫ ∫ .<br />
1 1 0 0 1 0 0 1 0<br />
0 0 0<br />
0<br />
n+ n+<br />
n+ n+<br />
V V t<br />
S<br />
Itt En+ 1 En ( En+<br />
1)<br />
δ = δ + ∆ δ . Behelyettesítve a növekményi alakokat a tételbe és<br />
rendezve az egyenletet:<br />
∆S : δ E + S : ∆( δ E ) + ∆S : ∆( δ E ) dV =<br />
∫ [ n+ n n n+ n+ n+<br />
]<br />
V0<br />
1 1 1 1 0<br />
∫ ∫ ∫<br />
= g ⋅δ u dV + t ⋅δu dS − S : δE<br />
dV<br />
∗<br />
( n)<br />
0, n+ 1 0 0n+ 1 0 n n 0<br />
V0 t<br />
S0<br />
V0<br />
Feltételezve, hogy ismerjük a t = tn<br />
időponthoz tartozó megoldásokat, ez az<br />
egyenlet csak két ismeretlent ( ∆Sn+1 és ∆( δ En+ 1)<br />
) tartalmaz (megjegyezzük, hogy<br />
esetleges dinamikus hatások esetén egy harmadik ismeretlent is figyelembe kell<br />
venni, hiszen<br />
∗<br />
elemei ilyenkor b + ∆b -től függnek, ahol a növekményi tag<br />
ismeretlen).<br />
g0n+ 1<br />
0n 0n+<br />
1<br />
A második Piola-Kirchhoff-féle feszültségtenzor növekménye az anyagmodellek által<br />
meghatározott (általában nemlineáris) módon függ az alakváltozásoktól (D az anyagi<br />
merevség tenzora, most a nemlinearitás miatt az alakváltozás-tenzor függvénye):<br />
∆<br />
En+<br />
1<br />
n+<br />
1 = ∫<br />
En<br />
ahol Sn+ 1 a En+ 1 En+ 1 En<br />
S D(E): dE<br />
,<br />
∆ ∆ = − nemlineáris függvénye.<br />
Felhívjuk a figyelmet, hogy itt természetesen még csak E n az ismert mennyiség,<br />
∆ En+ 1 az ismeretlen un+ 1<br />
∆ nemlineáris függvénye (emlékeztetőül hivatkozunk a<br />
Green-Lagrange-tenzor definíciójára, lásd a második előadást). Így ∆ Sn+ 1 maga is<br />
∆ un+ 1 nemlineáris függvény lesz (még akkor is, ha D maga nem függne esetleg Etől).<br />
Mindezeket figyelembe véve végeredményben a virtuális elmozdulások tételének<br />
előbb felírt egyenlete az ismeretlen ∆ un+ 1 elmozdulás-növekmény nemlineáris<br />
függvénye lesz. Ennek a változónak iterációs meghatározására például alkalmazható<br />
Newton eljárása.<br />
11 A g vektor feletti csillag arra utal, hogy szükség esetén az esetleges dinamikai terhet ennél az<br />
elemnél kell figyelembe venni.<br />
10.06.22. 12
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
A módszer elvét a következő ábra szemlélteti egyváltozós függvény esetére (a<br />
mechanikai modell lehet például egy nemlineáris viselkedésű húzott rúd). Az iteráció<br />
alapelve:<br />
<strong>8.</strong>6. ábra:<br />
Az algoritmus<br />
részletei<br />
u<br />
( m+<br />
1)<br />
n+<br />
1<br />
= u<br />
10.06.22. 13<br />
( 0)<br />
n+<br />
1<br />
+<br />
Megjegyezzük, hogy az ábrán R-rel jelölt tagokat reziduum-nak (maradékvektor,<br />
hibavektor) nevezzük. Többváltozós rendszerre alkalmazva a Newton-eljárást:<br />
Az ismeretlen<br />
∑ + m 1<br />
i=<br />
1<br />
∆ u<br />
( i)<br />
n+<br />
1<br />
m+<br />
1<br />
( m+<br />
1)<br />
( 0)<br />
( i)<br />
n+ 1 = u n+<br />
1 + ∑ ∆u<br />
n+<br />
1<br />
i=<br />
1<br />
( m+<br />
1)<br />
, illetve u n+<br />
1<br />
( m)<br />
( m+<br />
1)<br />
= u n+<br />
1 + ∆u<br />
n+<br />
1<br />
∆<br />
( + 1)<br />
+ 1<br />
m<br />
n<br />
u .<br />
u számítására ismét felhasználjuk a virtuális elmozdulások<br />
tételét. Az előző alkalmazásban szereplő ∆S n+ 1 : ∆( δEn+ 1)<br />
tagot a linearizálás<br />
érdekében elhagyjuk, így az új egyenlet az új változókkal:<br />
( m+ 1) ( m+ 1) ( m) ( m+<br />
1)<br />
⎡<br />
⎣∆S n+ 1 : δ En+ 1 + S n+ 1 : ∆( δ En 1 ) ⎤ + ⎦ dV0 =<br />
∗<br />
g0, n+<br />
1 ⋅δ u dV0<br />
+<br />
Az itteni<br />
∫ ∫<br />
V0 V0<br />
S tag az<br />
( + 1)<br />
∆ + 1<br />
m<br />
n<br />
∫ ∫ .<br />
+ t ⋅δu dS − S : δE<br />
dV<br />
( n) ( m) ( m)<br />
0n+ 1<br />
n+ 1 n+<br />
1 0<br />
St V0<br />
( m+<br />
1)<br />
En+<br />
1<br />
∫ D(E) : dE<br />
kifejezés<br />
( m)<br />
En+<br />
1<br />
( m)<br />
( m)<br />
( m+<br />
1)<br />
változatából számítható (itt E n+ 1 = E(<br />
u n+<br />
1)<br />
és E n+<br />
1<br />
( m+<br />
1)<br />
= E(<br />
u n+<br />
1 ) ):<br />
( m+ 1) ( m) ∆ S = D<br />
( m+ 1)<br />
: ∆ E ,<br />
( m) ( m)<br />
ahol D = D( E ) , és<br />
u -hez tartozó linearizált<br />
( m)<br />
n+ 1<br />
n+ 1 n+ 1 n+ 1 n+ 1 n+<br />
1<br />
( m+<br />
1)<br />
( m+<br />
1)<br />
( m)<br />
( m)<br />
( m+<br />
1)<br />
( m)<br />
∆E = E(<br />
u ) − E(<br />
u ) = E(<br />
u + ∆u<br />
) − E(<br />
u ) .<br />
n + 1<br />
n+<br />
1<br />
n+<br />
1 n+<br />
1 n+<br />
1<br />
n+<br />
1
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
A Green-Lagrange-tenzor definíciós képletével kifejezhetjük a fenti egyenletekben<br />
szereplő<br />
( m+<br />
1)<br />
∆(<br />
δE<br />
) alakváltozást.<br />
( + 1)<br />
∆ m<br />
u -nek a virtuális elmozdulások tétele<br />
n+<br />
1<br />
segítségével történő meghatározása után<br />
( m+<br />
1)<br />
n+<br />
1<br />
10.06.22. 14<br />
n+<br />
1<br />
u is számítható, majd ezt követően<br />
( m+<br />
1)<br />
n+<br />
1<br />
E számítása következik, végül a feszültségtenzort módosítjuk:<br />
( m+<br />
1)<br />
En+<br />
1<br />
( m+<br />
1)<br />
n+ 1 =<br />
(0)<br />
n+ 1 + ( : d , ahol<br />
(0)<br />
n+ 1 =<br />
( Sn )<br />
n ,<br />
(0)<br />
n+ 1 =<br />
( Sn<br />
)<br />
n<br />
∫<br />
S S D E) E E E S S<br />
(0)<br />
En+<br />
1<br />
Megjegyezzük, hogy a feszültségmódosítás integrál-kifejezését szokás<br />
trapézszabállyal közelíteni:<br />
( m+<br />
1)<br />
En+<br />
1<br />
1 (0) ( m+ 1) ( m+<br />
1) (0) ( 0)<br />
( 0)<br />
( m+<br />
1)<br />
( m+<br />
1)<br />
∫ D( E) : dE≈<br />
( Dn+ 1 + Dn+ 1 ) : ( En+ 1 −E<br />
n+<br />
1)<br />
, D n+<br />
1 = D(<br />
E n+<br />
1)<br />
, Dn+<br />
1 = D(<br />
E n+<br />
1 ) .<br />
2<br />
(0)<br />
En+<br />
1<br />
A virtuális erők tétele 12<br />
Fontos különbség az előző tételhez képest, hogy a virtuális erők tétele csak kis elmozdulások<br />
esetén alkalmazható (az anyagmodellek természetesen tetszőlegesek lehetnek). Ezért most<br />
nem írjuk fel újból az előadás elején az „ismétlés” pontban megadott tételt, de egy példában<br />
kitérünk egy lehetséges alkalmazására.<br />
<strong>8.</strong>3 Példa<br />
Vizsgáljuk meg az ábrán látható, belső nyomással terhelt vastag falú hengert, és határozzuk<br />
meg annak a belső nyomásnak az értékét, amelynek hatására ismert értékű sugárirányú<br />
eltolódás jön létre. Az ábra egy teljesen általános terhelést mutat, jelen példában azonban<br />
csak a belső nyomás hatását vizsgáljuk.<br />
<strong>8.</strong>7. ábra: Belső-külső nyomással terhelt vastagfalú cső<br />
12 A virtuális erők tételét először a kiváló francia mérnök és fizikus, Benoit Paul Emile Clapeyron<br />
(1799 – 1864) fogalmazta meg. Clapeyron évtizedeken keresztül volt Gabriel Lamé barátja és<br />
munkatársa, nagyon sok mérnöki feladaton dolgoztak közösen. Lamé híres szilárdságtani könyvében<br />
(„Lecons sur la Théorie Mathámatique de l’Élasticité des Corps Solides, Párizs, 1852”) közli<br />
Clapeyron levezetéseit, megjegyezve, hogy a módszert Clapeyron jóval korábban dolgozta ki, de ez<br />
a tétel első publikációja.
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Írjuk fel hengerkoordináta-rendszerben a virtuális erők tételét:<br />
− ∫ ( δσr<br />
ε r + δσϑε<br />
ϑ + δσ zε<br />
z + δτr<br />
ϑγ<br />
r ϑ + δτϑ<br />
zγ<br />
ϑ z + δτ z r γ z r ) dV +<br />
V<br />
∫ ∫ .<br />
+ ( δ g u + δ g u + δ g u ) dV + ( δ p u + δ p u + δ p u ) dA=<br />
0<br />
r r ϑ ϑ z z r r ϑ ϑ z z<br />
V Ae<br />
Jelen esetben u = 0, γ = 2ε = 0, γ = 2ε = 0, γ = 2ε = 0,<br />
ϑ rϑ rϑ ϑ z ϑ z z r z r<br />
illetve<br />
σr ϑ = 0 , σϑ<br />
z = 0 és σ z r = 0 .<br />
Mivel a példában = 0,<br />
így σ = 0 , vagyis síkbeli, szimmetrikus feszültségállapotot<br />
σ0 z<br />
kell vizsgálnunk. Jelöljük ur - t u -val, és írjuk fel újból a virtuális erők tételének<br />
egyszerűsödött alakját:<br />
− ( δσ ε + δσ ε ) dV+ δ pu dA=<br />
0<br />
∫ ∫ .<br />
r r ϑ ϑ<br />
V Ae<br />
Az alakváltozások és feszültségek kapcsolata:<br />
1<br />
ε r = ( σ r<br />
E<br />
1<br />
− νσ ϑ ) , ε ϑ = ( −νσ<br />
r + σϑ<br />
) .<br />
E<br />
Behelyettesítve ezeket a virtuális erők tételébe:<br />
−<br />
⎡<br />
⎢<br />
δσr ⎣<br />
1 1<br />
⎤<br />
( σr − νσ ϑ) + δσϑ ( −νσ r + σ ϑ)<br />
dV<br />
E E<br />
⎥<br />
+<br />
⎦<br />
δ p u dA = 0<br />
∫ ∫ .<br />
V Ae<br />
Az utolsó tagban u a megoszló teher irányában létrejövő elmozdulást jelenti.<br />
A feszültségek és a belső nyomás kapcsolatát rugalmasságtani megoldások alapján<br />
(lásd pl. Bezuhov: Bevezetés a rugalmasságtanba és képlékenységtanba c. könyvét<br />
vagy Handbook of the solutions of elasticity c. munkát) írhatjuk fel:<br />
2<br />
2<br />
⎡⎛<br />
r ⎤ ⎡ ⎤<br />
a ⎞<br />
⎛ ra<br />
⎞<br />
⎢⎜<br />
⎟ −1⎥<br />
pb<br />
⎢⎜<br />
⎟ + 1⎥<br />
pb<br />
⎢⎣<br />
⎝ r ⎠ ⎥⎦<br />
⎢ ⎥<br />
,<br />
⎣⎝<br />
r ⎠<br />
σ σ =<br />
⎦<br />
r =<br />
.<br />
2<br />
ϑ<br />
2<br />
⎛ ra<br />
⎞<br />
⎛ ra<br />
⎞<br />
⎜<br />
⎟ −1<br />
⎜<br />
⎟ −1<br />
⎝ ri<br />
⎠<br />
⎝ ri<br />
⎠<br />
A virtuális feszültségek és a virtuális terhelés ennek megfelelően:<br />
2 2<br />
⎡⎛ ra ⎞ ⎤ ⎡⎛ ra<br />
⎞ ⎤<br />
⎢⎜ ⎟ −1⎥ δ pb ⎢⎜ ⎟ + 1⎥<br />
δpb<br />
⎢⎝ r ⎠ ⎥ ⎢⎝ r ⎠ ⎥<br />
δσ r =<br />
⎣ ⎦<br />
, δσ , p p<br />
2 ϑ =<br />
⎣ ⎦<br />
δ =δ<br />
2<br />
b .<br />
⎛ r ⎞ ⎛ a r ⎞ a<br />
⎜ ⎟ −1 ⎜ ⎟ −1<br />
⎝ ri ⎠ ⎝ ri<br />
⎠<br />
Figyelembe véve, hogy dV = 2 rπh<br />
dr és Ae<br />
= 2ri<br />
πh<br />
, majd minden egyes tagot<br />
behelyettesítve a virtuális erők tételébe, eredményül kapjuk az alábbi egyenletet:<br />
2<br />
1 r ⎡ ⎛ i r ⎞ ⎤<br />
a<br />
− ⎢(1 − ν ) + (1 + ν) p 0<br />
2<br />
⎜ ⎟ ⎥ b δ pb + uδ pb<br />
= .<br />
E ⎛ r ⎞ ⎢ r<br />
a<br />
i ⎥<br />
1 ⎣ ⎝ ⎠ ⎦<br />
⎜ ⎟ −<br />
⎝ ri<br />
⎠<br />
Elosztva b p δ -vel kifejezhetjük a keresett belső nyomást az előírt elmozdulás<br />
függvényében:<br />
10.06.22. 15
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Az idegen munkák tétele<br />
2<br />
⎛ r ⎞ a<br />
⎜ ⎟ −1<br />
ri E<br />
pb =<br />
⎝ ⎠<br />
u . 2<br />
ri ⎛ r ⎞ a<br />
1 − ν + (1 + ν) ⎜ ⎟<br />
⎝ ri<br />
⎠<br />
Vizsgáljunk meg két különböző, nem összetartozó („idegen”) valódi erőrendszert, kis<br />
elmozdulásokkal és alakváltozásokkal, valamint lineárisan rugalmas anyagi viselkedéssel.<br />
Az egyes munkák számításánál most koncentrált dinámok hatását is figyelembe vesszük.<br />
Az első rendszer elemeit „egyes”, a másikét „kettes” indexszel jelöljük.<br />
f , g , q ⇒ σ ⇒ ε<br />
-1<br />
= D ⋅ σ ⇒ u , e , (<strong>8.</strong>18)<br />
1<br />
1<br />
1<br />
1<br />
-1<br />
f 2 g 2 , q 2 ⇒ σ 2 ⇒ ε 2 = D ⋅ σ 2 ⇒<br />
1<br />
10.06.22. 16<br />
1<br />
1<br />
2<br />
1<br />
, u , e . (<strong>8.</strong>19)<br />
Számítsuk ki először az „első” halmaz általánosított erőinek a „második” halmaz<br />
általánosított elmozdulás rendszerén végzett idegen munkáját, majd ugyanezt végezzük el<br />
fordítva: a „második” rendszer adja az általánosított erőket, az „első” pedig az általánosított<br />
elmozdulásokat:<br />
W1 2,<br />
K = f1 ⋅ e 2 + q1<br />
⋅ u 2 dA+<br />
g1<br />
⋅u<br />
2 dV , W1<br />
2,<br />
B = − σ1<br />
⋅ ε 2 dV , (<strong>8.</strong>20)<br />
∫<br />
A<br />
∫<br />
∫ ∫<br />
V<br />
∫ g 2 ⋅u<br />
1 dV W21,<br />
B = −∫<br />
W21 , K = f 2 ⋅e<br />
1 + q 2 ⋅ u1<br />
dA+<br />
, σ 2 ⋅ ε1<br />
dV . (<strong>8.</strong>21)<br />
A<br />
V<br />
A virtuális elmozdulások tételét mindkét esetben figyelembe véve:<br />
W W = , W + W = 0 . (<strong>8.</strong>22)<br />
12 , K + 12,<br />
B 0 21,<br />
K 21,<br />
B<br />
Írjuk fel most részletesen W 12 , B értékét:<br />
-1<br />
-1<br />
∫ σ 1 ⋅ ε 2 dV = −∫<br />
ε 2 ⋅ σ1<br />
dV = − ∫ ( D ⋅ σ 2 ) ⋅ σ 1 dV = − ∫ σ 2 ⋅ D ⋅ σ dV =<br />
W12 , B = −<br />
1<br />
V V V V<br />
2<br />
= −∫<br />
2 ⋅ 1 dV = W21,<br />
B ε σ (<strong>8.</strong>23)<br />
V<br />
Ebből az egyenletből és az előző munkatételekből újabb kapcsolati összefüggést írhatunk fel:<br />
W = (<strong>8.</strong>24)<br />
K K<br />
W 12 , 21,<br />
A mechanikában ezt az egyenlőséget Betti 13 -tételnek, vagy más néven külső idegen<br />
munkák egyenlőségének hívják. Az itt használt gondolatmenettel összesen 10 tétel<br />
fogalmazható meg:<br />
a./ Virtuális munkatétel alapján:<br />
W = − W , W = W , W = W . (<strong>8.</strong>25)<br />
12, K 12, B 12,B 21,B 12, K 21, K<br />
b./ Virtuális kiegészítő munkatétel alapján:<br />
W % = -W% , W% 12, B = W% 21, B , W% 12, K = W%<br />
21, K . (<strong>8.</strong>26)<br />
12,K 12,B<br />
c./ Vegyes tételek alapján:<br />
W = W% , W % = -W , W = − W% , W% = W . (<strong>8.</strong>27)<br />
12, B 21, B 12,K 21,B 12, K 21, K 12, K 21, K<br />
13 Enrico Betti (1823 -1892) kiváló olasz matematikus.
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Mindhárom csoportban vastaggal kiemeltünk egy tételt („a”/2, „b”/1, „c”/2), ezekkel<br />
gyakorlati fontosságuk miatt külön foglalkozunk.<br />
Felcserélhetőségi tételek<br />
Az alábbi három tételnél feltételezzük, hogy g és q zérus.<br />
a./ Külső elmozdulások felcserélhetősége (Maxwell 14 -féle felcserélhetőségi tétel):<br />
Az alkalmazott két erőrendszer mindegyikét alkossa egyetlen egy egységdinám (erő<br />
vagy nyomaték): F1 = 1 és F2<br />
= 1.<br />
Felhasználva a „b/1” alatti tételt és behelyettesítve<br />
ezt az erőrendszert:<br />
W% = W% ⇒ e F = e F ⇒ e =e . (<strong>8.</strong>28)<br />
12, K - 12, B 1 2 2 1 12 21<br />
A tételben szereplő változónál az első index a helyet, a második index az okot jelöli,<br />
lásd az alábbi ábrát:<br />
<strong>8.</strong><strong>8.</strong> ábra: Maxwell tétele<br />
A tételt elsősorban elmozdulási hatásábrák készítésére használják.<br />
b./ Belső erők felcserélhetősége (Kossalka 15 -féle első felcserélhetőségi tétel):<br />
A tételt statikailag határozatlan tartóknál alkalmazzák igénybevételek számítására. Az<br />
alkalmazott elmozdulások legyenek egységnyi értékűek.<br />
W = W ⇒ − M ϑ = − S u ⇒ S = M . (<strong>8.</strong>29)<br />
12, B 21, B<br />
1 2 2 1 12 21<br />
A tétel magyarázatához ad segítséget az alábbi ábra:<br />
<strong>8.</strong>9.ábra: Kossalka első tétele<br />
c./ Belső erő és külső elmozdulás felcserélhetősége (Kossalka-féle második<br />
felcserélhetőségi tétel):<br />
14 James Clerk Maxwell (1831 – 1879) skót matematikus és fizikus, a legnagyobb tudósok egyike.<br />
Sokat foglalkozott mechanikai témájú feladatokkal is.<br />
15 Kossalka János (1871–1944) kiváló magyar hídépítő mérnök. Ő tervezte például az Árpád-hidat<br />
is.<br />
10.06.22. 17
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Az első rendszerben az alkalmazott elmozdulás, a másodikban pedig az alkalmazott<br />
erő legyen egységnyi:<br />
W% = −W ⇒ S u = e f ⇒ S =e . (<strong>8.</strong>30)<br />
12, K 21, B 2 1 1 2 12 21<br />
A tétel magyarázatához lásd az alábbi ábrát:<br />
<strong>8.</strong>10. ábra: Kossalka második tétele<br />
A tételt igénybevételi hatásábra kinematikus módon történő készítéséhez<br />
használják, hiszen ilyenkor az igénybevételi hatásábra egy adott keresztmetszetben az<br />
igénybevételnek megfelelő egységnyi relatív elmozdulásból származó lehajlási ábra<br />
lesz.<br />
Elmozdulási hatásábrák<br />
Egy tartószerkezet valamely K pontjának K ( ) C η elmozdulási hatásábráját a tartón<br />
végigmenő függőleges egységerő hatásából úgy számítjuk, hogy a K ponton a C<br />
elmozdulásnak megfelelő Q =1 terhet (erőt, erő-párt, nyomatékot, nyomaték-párt)<br />
működtetünk, és meghatározzuk a tartón végigmenő egységerő támadáspontjainak<br />
függőleges eltolódási ábráját (lásd a Maxwell-féle felcserélhetőségi tételt).<br />
Ez a függőleges eltolódási ábra megadja a keresett elmozdulási hatásábrát.<br />
<strong>8.</strong>11. ábra: Virtuális dinámok felvétele elmozdulási hatásábrákhoz<br />
10.06.22. 18
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
<strong>8.</strong>4 Példa<br />
Határozzuk meg a tartó „C” csuklóba befutó rudak végeinek „nagyított” relatív elfordulási<br />
hatásábráját:<br />
Megoldás:<br />
A relatív elfordulási hatásábra számításához a C csuklóban elhelyezett egységnyi nyomatékpárból<br />
keletkező függőleges eltolódási ábrát kell kiszámítanunk. Ezt a nyomatékábrát és a<br />
ingarudakban keletkező rúderőket a lenti ábrán már megrajzoltuk.<br />
A hajlítási merevség az egész tartón állandó, az inerciasugár négyzete 1,6.<br />
<strong>8.</strong>12. ábra: Elfordulási hatásábra számításának első lépése<br />
A függőleges eltolódási ábrát úgy fogjuk meghatározni, hogy először kiszámítjuk a<br />
„3” jelű pont abszolút mozgásait (függőleges eltolódását és abszolút elfordulását), ezt<br />
követően meghatározzuk a C csuklónál keletkező relatív elfordulást és végül ezek<br />
ismeretében az összes többi pont függőleges eltolódását.<br />
A ϑ C relatív elfordulás meghatározásához az egységnyi nyomaték-párból kapott<br />
igénybevételeket kell „önmagukkal” integrálni, hiszen ilyenkor a virtuális hatást<br />
ugyancsak egy egységnyi nyomaték-párral kell megadnunk. Megjegyezzük, hogy az<br />
inerciasugár négyzetére azért van szükségünk, hogy az ingarudakban keletkező<br />
normálerők hatását is ugyanúgy EI x nagyítással tudjuk figyelembe venni (mivel a<br />
rugalmassági modulus ugyanakkora a gerendánál és az ingarudaknál, annak hatása a<br />
I x<br />
nagyításnál kiejthető, az hányados pedig nem más, mint az inerciasugár<br />
A<br />
négyzete).<br />
6⋅1<br />
2 3⋅1<br />
2<br />
ϑ<br />
C = + 12⋅1⋅1+<br />
+ 1,<br />
6⋅<br />
2 3 2 3<br />
2 ⋅3(<br />
10.06.22. 19<br />
2<br />
6<br />
2<br />
6<br />
+<br />
2<br />
6<br />
2 1 1<br />
) + 1,<br />
6⋅<br />
3⋅<br />
= 16,<br />
288 kNm<br />
6 3 3<br />
2
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
A „3”-as pont nagyított függőleges eltolódásának számításához a pontba függőleges<br />
egységerőt iktatunk, majd az ebből kapott igénybevételeket integráljuk az egységnyi<br />
nyomaték-párból kapott hatásokkal:<br />
<strong>8.</strong>13. ábra: Függőleges eltolódás számítása<br />
6⋅<br />
3 1<br />
2 2 2 2<br />
3<br />
e3 y = + 1,<br />
6⋅3⋅<br />
2 ( − ) = 2,<br />
25kNm<br />
2⋅<br />
2 2<br />
6 2 6 2<br />
A „3”-as pont nagyított abszolút elfordulásának meghatározásához a pontba<br />
egységnyi nyomatékot helyezünk:<br />
<strong>8.</strong>14. ábra: Elfordulás számítása<br />
3 ⋅ 1 2 3 1 2 3 1 3 ⋅ 1 2 3 1<br />
ϕ 3 = − + 3 ⋅ ( + ) + ( + ) −<br />
2 ⋅ 2 3 8 2 8 8 2 2⋅ 2 8 8 3<br />
1 3 ⋅1 ⋅1 ⋅2 2 3 ⋅ 2 2 2 1 1<br />
−6⋅1⋅ − −1,6 ⋅3⋅ 2( + ) −1,6 ⋅3 ⋅ ⋅<br />
4 2 ⋅4 ⋅ 3 6 24 6 24 3 12<br />
2<br />
ϕ 3 = −1,<br />
5105 kNm .<br />
A többi pont eltolódásának meghatározása:<br />
3⋅1 e1<br />
y = 2, 25 + 1,51⋅ 6 − ⋅ 5 = 7,56( ↓)<br />
2⋅ 2<br />
3⋅1 e2<br />
y = 2,25 + 1,51 ⋅3 − ⋅ 2 = 5,28( ↓)<br />
2⋅ 2<br />
1 3⋅1 e4<br />
y = 2,25 −1,51 ⋅3 − 3⋅ ⋅1,5 − ⋅ 1 = −5, 28( ↑)<br />
2 2⋅ 2<br />
1 3<br />
e 5 y = 2,25 −1,51 ⋅6 − 3⋅ ⋅4,5 − ⋅ 4 − 3⋅1⋅ 1,5 = −21,06( ↑ )<br />
2 4<br />
3 3<br />
e 6 y = 2,25 −1,51 ⋅9 − ⋅7,5 − ⋅7 − 3⋅ 4,5 + 16,288 ⋅3 − 3⋅ 1,5 = 3,024( ↓<br />
)<br />
2 4<br />
10.06.22. 20<br />
.
Bojtár: Mechanika MSc Nyolcadik előadás <strong>Előadás</strong>vázlat<br />
Felhasznált irodalom:<br />
3 3<br />
e 7 y = 2,25 −1,51 ⋅12 − ⋅10,5 − ⋅10 − 9⋅ 4,5 + 16,288 ⋅ 6 = 18,1( ↓ )<br />
2 4<br />
3 3<br />
e 8 y = 2, 25 −1,51 ⋅15 − ⋅1,5 − ⋅13 −12 ⋅ 6 + 16,288 ⋅ 9 = 24,192( ↓ ) .<br />
2 4<br />
A relatív elfordulási hatásábra alakja:<br />
<strong>8.</strong>15. Az elfordulási hatásábra<br />
1./ Kaliszky S. – Kurutzné K. M. – Szilágyi Gy. : Szilárdságtan, Egyetemi Tankönyv, 2000.<br />
2./ Fung: Foundation of Solid Mechanics, Prentice Hall, 1965, 1994.<br />
3./ Bezuhov, N. I. : Bevezetés a rugalmasságtanba és a képlékenységtanba, Tankönyvkiadó, 1952.<br />
4./ Mang, H. – Hofstetter, G. : Festigkeitslehre, Springer, 2000.<br />
5./ Holzapfel, G. A. : Nonlinear solid mechanics, Wiley, 2000.<br />
10.06.22. 21