TP 04.3 Maxpid - Corrigé.pdf - Stephane Genouel.
TP 04.3 Maxpid - Corrigé.pdf - Stephane Genouel.
TP 04.3 Maxpid - Corrigé.pdf - Stephane Genouel.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
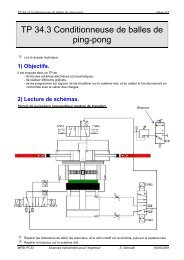
<strong>TP</strong> <strong>04.3</strong> <strong>Maxpid</strong> Corrigé Corrigé Page 1/3<strong>TP</strong> <strong>04.3</strong> <strong>Maxpid</strong>1) Objectifs du <strong>TP</strong> et sommaire.2) Étude théorique.21) Réalisation du schéma fonctionnel de l'asservissement deposition du bras.Question 1 : Donner la relation temporelle générale qui relie vitesse angulaire et position angulaire. Enbrad( p)déduire la fonction de transfert . ( p)dbrad()tb() t dtL b( p) p. b rad( p)bbrad( p) 1 (en s) ( p)pQuestion 2 : Déterminer la fonction de transfert qui permet de passer de la position angulaire brad( p )exprimée en radians à la position angulaire b ( p ) exprimée en degrés.b2rad 360deg brad() t b () tbrad( t).360b() t 2Lbrad( p).360b( p)2b( p) 360brad( p) 2 (en °/rad)22) Simulation du système à partir du logiciel Did'Acsyde etanalyse de l’influence des correcteurs. A l’aide de la notice du logiciel « Did'Acsyde », compléter le schéma-bloc en ajoutant :- les deux blocs qui correspondent aux deux fonctions de transfert trouvées précédemment. (vouspourrez utiliser la fonction « intégrateur » proposée par le logiciel « Did'Acsyde ») ;- le symbole représentant la première entrée : consigne de position bc () t correspondante à unéchelon d’amplitude 10° (sans retard) ;- le symbole représentant la deuxième entrée : couple de perturbation cr() t correspondant à unéchelon d’amplitude 0,025 N.m, et paramétré pour apparaître au temps 0,3 s. Ce couple résistantpouvant apparaitre sur le système réel par l’action d’une branche de l’arbre qui gênerait ledéploiement du bras du robot cueilleur de fruit.cpN(s)D(s)CrocbcodeN(s)D(s)epskN(s)D(s)n1cintN(s)D(s)n2CNAn3H1N(s)D(s)H2N(s)D(s)n4H3N(s)D(s)n5systN(s)D(s)inteunitN(s)D(s)n6obcderH4N(s)D(s)N(s)D(s)ccN(s)D(s)MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff 20/01/2011
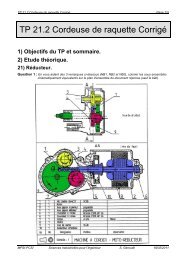
<strong>TP</strong> <strong>04.3</strong> <strong>Maxpid</strong> Corrigé Corrigé Page 2/3Simulation pour un échelon d’amplitude 10° :Correcteur Stabilité Rapidité PrécisionKp Ki KdNb dedépas t(si Cr = 0)Valeur du 1 er dépassementD1%(si Cr = 0)tr5% en ms(si Cr = 0)Er en °(si Cr = 0)Er en °(si Cr 0)Réponse temporelle12ob108255 0 0 2D10,8D1% ob( ) 10 33 0 0,336420-20.0 0.2 0.4 0.6 0.8 1.0 1.2TEMPS255 0 70255 20 70Question 3 : Indiquer quel a été l’effet du correcteur dérivé, et l’effet du correcteur intégral vis à vis desperformances de stabilité, rapidité et précision sous l’effet d’une perturbation.Le correcteur dérivé a amélioré la stabilité, et le correcteur intégral la précision.En revanche, le correcteur intégral placé en amont de la perturbation, a fait diminuer la stabilité.3) Expérimentation.31) Mise en évidence de l'asservissement.Question 4 : Au moyen de la poignée noire, essayer de modifier la position du bras. Que constatez-voussur les évolutions de la variable affichée et sur les « réactions » du système à vos efforts ?Il n'y a aucune difficulté à modifier cette position, cependant la position affichée de la position angulaire dubras suit toujours la position réelle du bras.Question 5 : Toujours au moyen de la poignée noire, essayer de modifier la position du bras « tout endouceur ». Que constatez-vous sur les évolutions de la variable affichée et sur les« réactions » du système à vos efforts ?On peut modifier la position par un effort assez important, mais le système revient à sa position lorsque l'oncesse tout effort.MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff 20/01/2011
<strong>TP</strong> <strong>04.3</strong> <strong>Maxpid</strong> Corrigé Corrigé Page 3/332) Analyse de l’influence des correcteurs à l'aide d’essais.CorrecteurStabilitéRapiditéPrécisionKp Ki KdNb dedépas t(si Cr = 0)Valeur du 1 er dépassement D1%(si Cr = 0)tr5%en ms(Cr=0)Er en °(Cr=0)Er en °(Cr0)Réponse temporelle(si Cr = 0)255 0 0 2D151,7 49,8D1% ob( ) 9,8 190 0,2255 0 70 1D1%D150,149,3 ob( ) 9,3 180 0,2255 20 70 2D150,7 49,7D1% ob( ) 9,7 260 0Question 6 : Indiquer quel a été l’effet du correcteur dérivé, et l’effet du correcteur intégral vis à vis desperformances de stabilité, rapidité et précision sous l’effet d’une perturbation.Le correcteur dérivé a amélioré la stabilité, et le correcteur intégral la précision.En revanche, le correcteur intégral placé en amont de la perturbation, a fait diminuer la stabilité.4) Conclusion.Question 7 : Comparer les résultats de l’expérimentation avec ceux de la simulation effectuée dans lapartie 2.Les différents réglages des gains du correcteur PID agissent globalement dans le même sens pour lasimulation et pour l’expérimentation.Toutefois le problème d’instabilité qui apparaissait dans la simulation avec le correcteur PID (cas 3) n’existepas dans le fonctionnement réel du maxpid…MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff 20/01/2011