You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
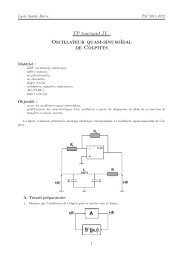
E.N.S. de CachanDépartement E.E.A.M2 FE3 e annéePhysique appliquée 2011-2012TD de Physique n o 1 :Mécanique du pointExercice n o 1 : Trajectoire d’un ballon-sondeUn ballon-sonde M, lâché au niveau du sol, s’élève avec une vitesse verticale⃗v 0 supposée constante. Le vent lui <strong>com</strong>munique une vitesse horizontale ⃗v = v x ⃗u xorientée suivant l’axe (Ox) proportionnelle à son altitude z : v x = z/τ où τ > 0.À l’instant t = 0, le ballon-sonde est lâché depuis le point O. On note (x(t), z(t))les coordonnées cartésiennes du point M.1. En utilisant le vecteur vitesse ⃗v du ballon, écrire les deux équationsdifférentielles vérifiées par x et z.2. En déduire les équations horaires x(t) et z(t) en fonction de v 0 , τ et t.3. Déterminer l’équation z(x) de la trajectoire suivie par le ballon-sonde aucours de son ascension. Quelle est la nature de la trajectoire ?4. Exprimer dans la base cartésienne (⃗u x , ⃗u z ) le vecteur accélération ⃗a(t)du ballon-sonde.z⃗u zO✻⃗v 0✻M ✻⃗u✲ x✲ ⃗vx✲Exercice n o 2 : Étude de quelques mouvements1. (Cours) Soit un mobile M possédant une trajectoire circulaire de centre O et de rayon R. Exprimerles vecteurs vitesse et accélération. Traiter le cas particulier du mouvement uniforme.2. Un mobile parcourt avec une vitesse constante v la spirale d’équation polaire : r = aθ avec a constant.Exprimer en fonction de θ et de v, le vecteur vitesse de M.3. Un mobile M décrit dans le plan (Oxy) une spirale suivant les équations horaires polaires suivantes :{ r(t) = b exp(−t/τ)θ(t) = ωtoù b, τ et ω sont des constantes positives. Tracer l’allure de la trajectoire de M. Exprimer les vecteurs vitesseet accélération. Montrer que le vecteur vitesse ⃗v forme à tout instant un angle α constant avec le vecteurposition ⃗r.Exercice n o 3 : Vecteur vitesse en coordonnées sphériquesExprimer le vecteur vitesse d’un mobile M en coordonnées sphériques en utilisant la loi de <strong>com</strong>positiondes vitesses.ATTENTION : ceci n’est pas applicable au vecteur accélération.Exercice n o 4 : Mouvement hélicoïdalUn point M, repéré par ses coordonnées cartésiennes x, y et z dans le repère (O, ⃗e x , ⃗e y , ⃗e z ), a pour trajectoirela courbe d’équation paramétrique :⎧⎨⎩x = R cos θ,y = R sin θ, avec θ ≥ 0z = hθ.où R et h sont des constantes positives. On suppose aussi que le point M parcourt la courbe dans le sens desθ croissants, soit ˙θ > 0.1
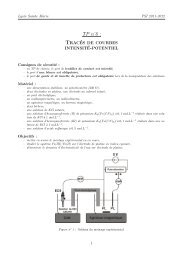
Exercice n o 8 : Système missile-cibleUne cible C suit l’axe (0, ⃗e x ) à une vitesse V ⃗ 0 = V 0 ⃗e x . À l’instant t = 0elle est à l’origine O du repère. Un missile M qui part à t = 0 du point Dde coordonnées (0, −a) a une vitesse λV 0 toujours dirigée par un systèmede guidage vers la cible C. On notera x et y les coordonnées de M, r = MCet θ l’angle entre la direction de la vitesse de M et l’horizontale.etdydt en fonction de λ, V 0, et θ, puis x et y en fonction1. Exprimer dxdtde V 0 , r, θ et t. En déduire deux équations différentielles en r(t) et θ(t).2. En déduire une équation différentielle en r(θ).3. Démontrer quer(θ) =a ( ( θ λtansin(θ) 2))y✻O✻a❄ D⃗v✑✑✑✸MC✲ xen utilisant :∫dx( x)sin(x) = ln + cste24. Quelle doit être la condition sur λ pour que le missile atteigne lacible ? Exprimer la durée τ de poursuite sachant que :∫ π201( ( x)) λdx λsin 2 tan =(x) 2 λ 2 − 1Exercice n o 9 : Déplacement sur une cardioïdeUn mobile décrit une courbe plane dont l’équation en coordonnées polaires est :r(θ) = r 0(1 + cos(θ))2où r 0 est une constante. Cette courbe est appelée "cardioïde", à cause de sa ressemblance avec un coeur. Elleadmet l’axe (O, ⃗e x ) <strong>com</strong>me axe de symétrie.1. Tracer succinctement cette courbe.2. Calculer l’abscisse curviligne en fonction de θ, en prenant <strong>com</strong>me origine θ = 0, s = 0.3. Pour quel angle θ 0 , s = r 0 .4. Exprimer la vitesse linéaire en fonction du temps t, de r 0 et de ω = dθdtconstant. Puis en fonction der, r 0 et ω.5. Déterminer les <strong>com</strong>posantes a r et a θ de l’accélération en fonction du temps t et de ω.Exercice n o 10 : Temps de montée et temps de descenteOn lance une bille verticalement. Met-elle plus de temps à monter qu’à redescendre ?Exercice n o 11 : Parabole de suretéÀ t = 0, un projectile de masse m assimilé à un point matériel esttiré à partir d’un point O avec une vitesse initiale ⃗v 0 . Le dispositif de tirimpose la norme de ⃗v 0 mais permet de choisir l’angle α entre l’axe (Ox)et ⃗v 0 (α ∈ [0, π 2[). Les frottements de l’air sont négligés.1. Déterminer les équations paramétriques du mouvement et l’équationde la trajectoire.2. Préciser les coordonnées du point d’altitude maximale et l’instantcorrespondant.y✻⃗v 0⃗e✻✲✒y αO ⃗e x3. On définit la portée <strong>com</strong>me étant la distance OI avec I le point de la trajectoire autre que O vérifianty(I) = 0. La calculer.4. On suppose v 0 constante mais α variable. Soit A(X, Y ) un objectif à atteindre par le projectile.Déterminer l’équation de la courbe dans le plan (O, ⃗e x , ⃗e y ), séparant les points de ce plan pouvant être atteintspar le projectile de ceux qui ne seront jamais atteints (parabole de sureté).5. Dans le cas où l’objectif A peut être atteint, monter que deux cas sont possibles :• un tir atteignant A avant le point de tangence de la parabole de chute avec la parabole de sureté,I✲ x3
• un tir atteignant A après le point de tangence.6. Dans le premier cas, montrer que ce tir n’est pas toujours direct (c’est à dire objectif atteint avant lesommet de la parabole de chute) en particulier montrer qu’il existe une ellipse qui délimite la nature du tir(direct ou indirect). Faire un schéma pour illustrer tous les cas de figure.Exercice n o 12 : Viscosimètre à chute de billeUne bille sphérique, de masse volumique µ B et de rayon R, est lâchée sans vitesse initiale dans un fluidede masse volumique µ. En plus du poids et de la poussée d’Archimède, on tient <strong>com</strong>pte de la force de viscositéexercée par le fluide sur la bille, opposée au déplacement et de norme :f = 6πηRvoù η est la viscosité du fluide et v la norme de la vitesse de la bille. Le champ de pesanteur a pour intensité g.Le référentiel d’étude est supposé galiléen et la bille est assimilée à un point matériel.1. Exprimer la vitesse limite ⃗v ∞ atteinte par la bille.On suppose que la bille atteint très rapidement cette vitesse limite. On mesure la durée ∆t nécessaire pourque la bille parcoure une distance H donnée.2. Déterminer la relation entre ∆t, g, H, R, µ B , µ, et η.3. Montrer que l’expression de la viscosité peut se mettre sous la forme η = K(µ B − µ)∆t, en exprimantla constante d’étalonnage K.4. La durée de chute de la bille est de 83 s. Calculer la viscosité η du fluide. Données : K = 14.10 −8 m 2 .s −2 ,µ B = 7880 kg.m −3 , µ = 912 kg.m −3 , g = 9, 8 m.s −2 .Rem : la viscosité s’exprime en Pascal-seconde (P a.s) ou en poiseuille (P l) : 1 P a.s = 1 P l = 1 kg.m −1 .s −1 .A 20˚C, la viscosité de l’eau est de 10 −3 P l, celle du glycérol est de 1, 49 P l.Exercice n o 13 : Prise en <strong>com</strong>pte du frottement de l’airÀ t = 0, un projectile de masse m assimilé à un point matériel est tiré à partir d’un point O avec unevitesse initiale ⃗v 0 formant un angle α avec l’axe (0, ⃗e x ). On tient <strong>com</strong>pte du frottement de l’air, modélisé par⃗F = −k⃗v avec (k > 0).1. Trouver les <strong>com</strong>posantes de la vitesse au temps t, et les équations paramétriques du mouvement.2. Préciser les coordonnées du point d’altitude maximale et l’instant correspondant. Retrouver les expressionscorrespondant au cas sans frottement.3. Montrer que l’on tend vers un mouvement rectiligne uniforme vertical.Exercice n o 14 : Ressorts équivalentsSoit deux ressorts de raideur respectives k 1 et k 2 , et de longueur à vide l 01 et l 02 .1. Déterminer le ressort équivalent de ces deux ressorts en parallèle.2. Déterminer le ressort équivalent de ces deux ressorts en série.Exercice n o 15 : Glissement avec frottementUn petit parallélépipède, assimilable à un point matériel M de masse m, estlancé depuis le point origine O d’un plan (Oxy) incliné d’un angle α par rapport àl’horizontale, avec un vecteur vitesse initial ⃗v 0 dirigé suivant la ligne de plus grandepente (Ox) et vers le haut. La position du point M à l’instant t est repérée parson abscisse x(t). On tient <strong>com</strong>pte des forces de frottement. On rappelle que tantqu’il y a glissement, la <strong>com</strong>posante tangentielle de la force de frottement R T (cellequi s’oppose au mouvement) est proportionnelle à la <strong>com</strong>posante normale R N decette même force, ce que l’on note R T = fR N où la constante positive f est appelée le coefficient de frottementdynamique. En outre, une fois que le mobile s’arrête, il reste immobile à condition que l’inégalité R T ≤ fR Nsoit vérifiée.1. Montrer qu’au début du mouvement, i.e. tant qu’il y a glissement vers le haut, l’accélération ẍ dumobile est du type ẍ = −Kg. Exprimer K en fonction de α et f.2. Quelle distance d le mobile parcourt-il avant que sa vitesse ne s’annule ?3. À quelle condition sur l’angle α le mobile s’arrête-t-il définitivement ?4
Exercice n o 16 : Coulissement sur une tige en rotationUne tige τ horizontale passant par O tourne autour de l’axe vertical(Oz) à la vitesse angulaire constante ω. Un point matériel M de masse mpeut coulisser sans frottement sur la tige. Il est repéré par ses coordonnéespolaires (r, θ) dans le plan (Oxy). À l’instant t = 0, le point M est abandonnésans vitesse initiale par rapport à la tige à la distance r 0 de l’origineO. On suppose de plus qu’à ce même instant, la tige est confondue avecl’axe (Ox) : θ(t = 0) = 0.1. Déterminer l’équation différentielle du second ordre vérifiée parr(t).2. Déterminer la loi horaire r(t) en fonction de r 0 et ω. Tracer l’allurede la courbe r(t) pour t ≥ 0.3. Donner les expressions des <strong>com</strong>posantes dans la base cylindrique de la réaction de la tige.Exercice n o 17 : Le palanUn palan est constitué de 2n poulies et d’un fil disposés <strong>com</strong>meindiqué sur le schéma ci-contre. Les axes des poulies supérieures sontfixes et ceux des poulies inférieures sont liés à une tige AB qui nepeut se déplacer que verticalement. Les poulies et le fil sont supposésidéaux. Un opérateur exerce une force ⃗ F sur l’extrémité libre du fil.Déterminer l’accélération de l’objet soulevé, de masse m.Exercice n o 18 : Décollement d’une masseSoit un point O ′ fixe situé au dessus d’une table à coussin d’airhorizontale. La projection orthogonale de O ′ sur la table est notée O.Une masse m assimilée à un point matériel est reliée à O ′ par un ressort de raideur k et de longueur à vide l 0 .La distance OO ′ est l 0 . La masse peut glisser sans frottement sur la table à coussin d’air.1. Initialement, la masse est en O. On lui <strong>com</strong>munique une vitesse initiale, V 0 (horizontale). Quellecondition doit être vérifiée pour que le ressort puisse décoller la masse du sol. Dans le cas où cette conditionest vérifiée, quelle vitesse initiale minimale doit-on lui imposer pour observer ce décollement.2. Dans le cas de petits déplacements autour de la position d’équilibre (x ≪ l 0 ), déterminer l’équationdifférentielle du mouvement. Exprimer la vitesse de la masse en fonction de x.Exercice n o 19 : Pendule dont le fil casseUn pendule simple - masse m, fil de longueur l, inextensible et de masse négligeable - est suspendu en unpoint fixe O et lâché sans vitesse initiale depuis une position où le fil est horizontal et tendu. Il tourne d’unangle α ≥ π 2et casse. Soit h la différence d’altitude entre le point O et le sommet de la trajectoire décrite parla masse après que le fil ait cassé.1. Donner qualitativement le domaine de variation de h.2. Déterminer h.Exercice n o 20 : Mouvement d’un point sur un cercleUn point matériel M de masse m peut coulisser sans frottement surun cercle de centre O et de rayon R, placé dans un plan vertical (Oxy) où(Oz) est orienté suivant la verticale ascendante. Le point M est attachéà l’extrémité d’un ressort de longueur à vide l 0 = 2R et de constantede raideur k, dont l’autre extrémité est fixée au point A. Un dispositifnon représenté impose au ressort de rester constamment rectiligne. Laposition du point M est repérée par l’angle θ = ( OB, ⃗ OM). ⃗ Le champ depesanteur est ⃗g = −g⃗u z .Données : R = 10 cm, m = 100 g, k = 10 N.m −1 , g = 10 m.s −2 .1. Déterminer l’expression de la distance AM en fonction de R etde θ.5
2. Exprimer l’énergie potentielle totale E p (θ) du point M. L’énergiepotentielle élastique est prise nulle lorsque le ressort a sa longueur à vide,l’énergie potentielle de pesanteur est prise nulle lorsque la cote z du point M est nulle.3. Représenter à l’aide de la calculatrice le graphe E p (θ), pour 0 ≥ θ ≥ 180˚.4. En déduire la valeur θ eq pour laquelle le point M est à l’équilibre sur le cercle. Cet équilibre est-ilstable ou instable ?5. Le point M est abandonné sans vitesse initiale depuis B. Déterminer la valeur θ max de l’angle θmaximal atteint au cours du mouvement ainsi que la valeur v max de la vitesse maximale atteinte.Exercice n o 21 : LoopingUne petite voiture, assimilable à un point matériel M de masse m, estlancée avec une vitesse v 0 sur une piste horizontale plane prolongée parun demi-cercle vertical de rayon R. La voiture glisse sans frottement sur lesupport, qu’elle est susceptible de quitter (la liaison n’est pas bilatérale).Sa position à l’intérieur du demi-cercle est repérée par l’angle θ(t) formépar le rayon OM avec la verticale descendante (OH).1. Comment varie la vitesse de la voiture jusqu’au passage au pointH ?2. Déterminer l’expression de la norme v de la vitesse de la voiturelorsqu’elle est située dans la piste semi-circulaire à la position repérée parl’angle θ, en fonction de v 0 , g, R et θ.3. Par projection du principe fondamental de la dynamique dans la base polaire (⃗u r , ⃗u θ ), déterminerl’intensité N de l’action de contact exercée par la piste semi-circulaire sur la voiture, en supposant le contactmaintenu, en fonction de m, v 0 , R, g et θ. Comment la fonction N(θ) varie t-elle ?4. A quelle condition sur la vitesse de lancement v 0 la voiture atteindra t-elle le sommet de la piste sansque le contact avec celle-ci soit rompu ?Exercice n o 22 : Équilibre et stabilité d’un point matérielUn point matériel M de masse m est attaché à l’extrémité d’un ressortde constante de raideur k et de longueur à vide l 0 , dont l’autre extrémité estfixée en un point A situé sur un axe vertical ascendant (Oz). La distance entrele point A et le point O est OA = a. Le point matériel M est assujetti à sedéplacer suivant l’axe horizontal (Ox), il coulisse sur cet axe sans frottement ;il est repéré par son abscisse x sur cet axe.1. Exprimer l’énergie potentielle E p totale du point M, en fonction duparamètre x et des données.2. À partir du tableau de variation, en déduire le graphe représentatifde la fonction E p (x). On distinguera les cas a > l 0 et a < l 0 .3. En déduire l’existence et la nature des positions d’équilibre du point M.Exercice n o 23 : Trois méthodes pour un même mouvementUn point matériel M de masse m est assujetti à glisser sansfrottement sur un cerceau vertical de rayon R et de centre O. Ilest lié au point A par un ressort de raideur k et de longueur aurepos nulle.1. Établir l’équation du mouvement du mobile en utilisantsuccessivement les trois méthodes suivantes :• la relation fondamentale de la dynamique,• le bilan énergétique,• le théorème du moment cinétique.2. Discuter l’existence de positions d’équilibre, leurstabilité, et dans l’affirmative, la période des petites oscilla-tions au voisinage de l’équilibre.6
Exercice n o 24 : Théorème du moment cinétique appliqué en un point mobilePrenons un pendule simple, de masse m et de longueurL, et imposons de petites oscillations horizontales à sonextrémité : x A = x 0 sin(ωt).1. Pour utiliser le théorème du moment cinétique,pourquoi vaut-il mieux l’appliquer au point mobile A plutôtqu’au point fixe O ? Reprendre la démonstration duthéorème pour exprimer la dérivée : d⃗ L Adt .2. Établir l’équation du mouvement du pendule simpleeffectuant de petites oscillations.3. Quel est son mouvement lorsqu’un régime sinusoïdalpermanent s’est établi.4. Quelle est la pulsation ω 0 au voisinage de laquellenos hypothèses d’étude sont à reprendre ? Que dire desmouvements du point A et du mobile selon que ω < ω 0ou ω > ω 0 ?Exercice n o 25 : Décroissance de l’énergie mécanique (cours)Un système oscillant est constitué par unemasse supposée ponctuelle m attachée à l’extrémitéd’un ressort horizontal dont l’autre extrémitéest fixée au point O. La masse m peut glisser sans frottement sur un support horizontal. L’action de l’airsur la masse est modélisée par une force de frottement fluide de la forme : ⃗ f = −h⃗v avec h un coefficient positifet ⃗v le vecteur vitesse de la masse ponctuelle m. On note k la constante de raideur du ressort, l 0 sa longueurà vide et X(t) la distance séparant le point O fixe et la masse m.1. Établir l’équation différentielle du second ordre vérifiée par le déplacement x(t) = X(t) − X eq de lamasse m par rapport à sa position d’équilibre X eq . La mettre sous la forme :ẍ + ω 0Q ẋ + ω2 0x = 0en identifiant Q et ω 0 .2. Donner l’équation caractéristique de l’équation différentielle précédente et rappeler les différents régimesd’évolution possibles selon les valeurs de Q.3. On pose α = ω02Q. Montrer que, dans le cas du régime pseudo-périodique, la solution de l’équationdifférentielle précédente peut se mettre sous la forme x(t) = Ce −αt cos(ωt + φ). Exprimer ω, C et φ en fonctionde ω 0 , α et des conditions initiales x(t = 0) = x 0 et ẋ(t = 0) = v 0 .4. Exprimer la pseudo-période en fonction de ω 0 et Q.5. On définit le décrément logarithmique par δ = ln ( x(t)x(t+T )). Donner son expression en fonction de Q.6. Entre deux élongations maximales successives x(t 0 ) et x(t 0 + T ) l’énergie mécanique passe de E m àE m + ∆E m . Exprimer ∆E m /E m en fonction de δ puis en fonction de Q dans le cas d’un oscillateur faiblementamorti.7. Toujours dans le cas de faibles amortissements, <strong>com</strong>bien faut-il de pseudo-périodes environ pour quel’amplitude reste en permanence inférieure à 5% de l’amplitude initiale ? Pour simplifier on se placera dans lecas où v 0 = 0.Exercice n o 26 : Mouvement newtonien (cours)Soit M un point matériel soumis à un champ de force central ⃗ F de centre O.1. Montrer que le mouvement de M est contenu dans un plan contenant O.2. Établir la loi des aires.On se place dans le cas d’un champ newtonien : ⃗ F = −α⃗e r /r 2 .3. Montrer que ce champ de force est conservatif et exprimer l’énergie potentielle associée en la prenantnulle infiniment loin de O.4. Retrouver l’expression de l’énergie potentielle effective et utiliser cette dernière pour indiquer les valeursque peut prendre r.7
5. Montrer, en multipliant vectoriellement la relation fondamentale de la dynamique par le momentcinétique, que le vecteur :⃗A = ⃗v × L ⃗ 0− ⃗e rαdit vecteur de Runge-Lenz, est une constante du mouvement.6. Exprimer les <strong>com</strong>posantes de A ⃗ dans la base polaire. En déduire que la trajectoire du point M est uneconique dont l’excentricité est || A||. ⃗ Donner l’expression du paramètre de cette conique en fonction de m, α etla constante des aires C.7. Développer l’expression du carré de la norme de A. ⃗ En déduire une relation entre l’excentricité e dela conique et l’énergie mécanique E m de M.8. Retrouver la loi de Képler dans le cas de l’orbite circulaire.9. Donner les expressions de la 1 re et de la 2 e vitesse cosmique. Faire l’application numérique avecg = 9, 8 m.s −2 (accélération de la pesanteur) et R T = 6400 km (rayon de la Terre).Exercice n o 27 : Orbite de HohmanOn désire transférer un satellite terrestre en attente sur une orbite circulaire"basse" de rayon r 1 = 6700 km vers une orbite circulaire "haute" derayon r 2 = 42000 km. On <strong>com</strong>munique pour cela en un point quelconque Pde l’orbite basse un supplément de vitesse orthoradiale ∆v P en allumant lesmoteurs pendant une durée très brève. Le satellite décrit une orbite de transfertelliptique - dite orbite de Hohman - qui se raccorde tangentiellement en unpoint A à l’orbite haute. Au point A, un nouvel allumage des moteurs pendantune durée très brève permet de stabiliser le satellite sur son orbite haute en<strong>com</strong>muniquant une variation ∆v A à la vitesse orthoradiale.Données : G = 6, 67.10 −11 N.m 2 .kg −2 , M T = 6.10 24 kg.1. Exprimer en fonction de r 1 et de r 2 l’excentricité de l’ellipse de transfert.2. Exprimer les vitesses v 1 et v 2 du satellite sur les orbites circulaires de rayons respectifs r 1 et r 2 . Calculerv 1 et v 2 .3. Déterminer l’expression des vitesses v P et v A du satellite sur l’ellipse de transfert respectivement aupoint P (juste après l’extinction des moteurs) et A (juste avant le rallumage des moteurs). Les calculer.Indication : dans une ellipse on a, avec les notations habituelles :a =pp1 − e 2 et b = √1 − e24. En déduire les accroissements de vitesse orthoradiale ∆v P et ∆v A .Exercice n o 28 : Comète de 1843En 1843, une <strong>com</strong>ète est passée extrêmement près du Soleil, de masse M S : sa distance au périhélie étaitd = 6, 1.10 −3 a 0 où a 0 est la rayon de l’orbite terrestre. Des mesures précises ont montré que l’excentricité dela <strong>com</strong>ète était e = 1 − x avec x = 9, 4.10 −5 .Données : u = 30 km.s −1 vitesse de révolution de la Terre autour du soleil.1. Exprimer le produit GM S en fonction de u et a 0 .2. En considérant que la trajectoire de la <strong>com</strong>ète est quasi-parabolique, calculer sa vitesse de passage v Pau périhélie. Indication : dans une ellipse on a, avec les notations habituelles :a =pp1 − e 2 et b = √1 − e23. Exprimer le demi-grand axe a de la trajectoire de la <strong>com</strong>ète, en fonction de d et x. Calculer a enfonction de a 0 .4. En déduire la vitesse v A de passage à l’aphélie en fonction de v P et x. Faire l’application numérique.5. En quelle année cette <strong>com</strong>ète reviendra-t-elle dans le système solaire ?8
Exercice n o 29 : Dynamique dans le référentiel géocentrique (cours)Soit un point matériel M de masse m dont on étudie le mouvement dans le référentiel géocentrique R 0 .1. Rappeler les définitions des référentiels de Copernic R C , de Képler R K et géocentrique R 0 .2. Appliquer la relation fondamentale de la dynamique à M dans le référentiel géocentrique non galiléen.Faire apparaître les termes de marée des différents astres définis par :⃗γ astre (M) = ⃗ G astre (M) − ⃗ G astre (O)où ⃗ G astre est le champ de gravitation de l’astre considéré.3. Proposer alors une explication aux phénomènes de marée en considérant uniquement l’influence de lalune.Exercice n o 30 : Dynamique dans le référentiel terrestre (cours)Soit un point matériel M de masse m dont on étudie le mouvement dans le référentiel terrestre R T . Onnote ⃗ω T le vecteur rotation de la Terre par rapport au référentiel géocentrique.1. Appliquer la relation fondamentale de la dynamique à M dans le référentiel terrestre non galiléen.Remarques : le référentiel galiléen de base à considérer est le référentiel de Copernic et les expressions desaccélérations d’entraînement et de Coriolis doivent être explicitées.2. Rappeler la définition du poids de M et donner l’expression du champ de pesanteur en négligeant lestermes de marée. Réécrire la relation fondamentale de la dynamique en introduisant le poids de M.3. Soit α l’angle formé par le poids de M et le champ de gravitation de la Terre. Déterminer α en fonctionde λ (la latitude), R T (le rayon de la Terre), ω T et g l’intensité de la pesanteur.4. Faire l’application numérique pour λ = 45˚et g = 9, 81 m.s −2 . On rappelle que R T = 6370 km.Exercice n o 31 : Oscillations dans un référentiel en rotationUn point matériel M de masse m peut coulisser sans frottement surune tige τ, d’extrémité O, contenue dans le plan (Oxy) et tournant autourde l’axe vertical (Oz) à la vitesse angulaire constante ω. De plus, lepoint M est attaché à l’extrémité d’un ressort de longueur à vide l 0 et deconstante de raideur k, enfilé sur la tige τ, dont l’autre extrémité est fixéeen O. La position du point M est repérée par son abscisse X(t) mesuréesur la tige par rapport au point O. On pose ω 0 = k m .1. Faire le bilan des forces exercées sur le point M dans le référentiellié à la tige.2. Montrer qu’il existe une position d’équilibre X eq du point M surla tige, sous réserve d’une condition portant sur ω à expliciter.3. En posant X(t) = X eq + x(t), déterminer l’équation différentielle vérifiée par x(t).4. En déduire la pulsation ω ′ des oscillations du point M autour de sa position d’équilibre. Que peut-ondire de la période des oscillations par rapport au cas où la tige est immobile ?Exercice n o 32 : Système de deux points matériels (cours)Soient deux points matériels M 1 et M 2 de masses respectives m 1 et m 2 et repérés par leur vecteur position⃗r 1 = −−→ OM 1 et ⃗r 2 = −−→ OM 2 . On posera ⃗r = −−−−→ M 1 M 2 .1. Déterminer la position ⃗r G de leur barycentre G. Exprimer, à l’aide de ⃗r, les positions relatives ⃗r 1 ∗ =−−−→GM 1 et ⃗r 2 ∗ = −−−→ GM 2 de M 1 et M 2 respectivement.2. On suppose que M 1 (resp. M 2 ) est soumis à la force extérieure F ⃗ ext→1 (resp. Fext→2 ⃗ ) et à la forceintérieure f ⃗ 2→1 (resp. f ⃗ 1→2 ). Établir le théorème du centre de masse.3. On suppose dans cette question que le système constitué des deux points matériels est isolé. Introduirela notion de mobile réduit pour décrire le mouvement des deux points matériels dans le référentiel barycentrique.9
Exercice n o 33 : BinairesOn considère deux étoiles E 1 et E 2 , assimilées à des points matériels de massesrespectives m 1 et m 2 , en interaction gravitationnelle et telles que le systèmeS = {E 1 , E 2 } soit isolé. Dans leur référentiel barycentrique R ∗ , on supposeque ces deux étoiles décrivent des orbites circulaires de rayons r 1 et r 2 . On poseD = r 1 + r 2 . La constante gravitationnelle est G = 6, 67.10 −11 N.m 2 .kg −2 .1. Pourquoi les deux étoiles ont-elles nécessairement la même période derévolution T ?2. Montrer que r1r 2= m2m 1.3. Établir la relation :T 2D 3 = 4π 2G(m 1 + m 2 )4. Deux étoiles α et β décrivent des orbites circulaires de rayon r 1 =1, 00.10 9 km et r 2 = 5, 0.10 8 km avec une période de orbitale T = 44, 5 annéesterrestres. Calculer leurs masses m 1 et m 2 .Exercice n o 34 : Comète SHOEMAKER-LEVY 9La <strong>com</strong>ète de SHOEMAKER-LEVY 9 est passée en juillet 1992 suffisamment près de Jupiter pour sefragmenter et éclater en morceaux à cause des forces de marée de Jupiter. Les différents morceaux de la <strong>com</strong>ètese sont finalement écrasés sur Jupiter en juillet 1994 et cette collision a été suivie en détail et en direct par lesastronomes du monde entier. Le but de cet exercice est de <strong>com</strong>prendre, à l’aide d’un modèle simple, l’originede la fragmentation.On supposera que le référentiel Jupiterocentrique R J est galiléen et on négligera dans tout le problème leseffets dus au Soleil dans ce référentiel. Jupiter est supposée sphérique et homogène.Données numériques : rayon de Jupiter : R J = 71400 km, masse de Jupiter : M J = 1, 91.10 27 kg, constantede gravitation : G = 6, 67.10 −11 N.m 2 .kg −2 , masse volumique de la glace : µ C = 1, 00.10 3 kg.m −3 .On cherche à déterminer la distance en dessous de laquelle un corps (ici la <strong>com</strong>ète) s’approchant de Jupiterse séparerait en plusieurs morceaux sous l’effet des forces de marée dues à Jupiter. Pour cela, on fait les deuxhypothèses suivantes :• La <strong>com</strong>ète de masse volumique µ C est en orbite circulaire de rayon r autour de Jupiter.• La <strong>com</strong>ète est constituée de deux sphères identiquesde masse m et de rayon d, homogèneset disposées <strong>com</strong>me indiqué sur la figure cicontre.Les deux sphères (1) et (2) ne sontliées entre elles que par leur attraction gravitationnellemutuelle. On suppose que la dispositiondes sphères reste inchangée au coursde la rotation de la <strong>com</strong>ète, leurs centres étanttoujours alignés avec le centre de Jupiter.On définit enfin le référentiel R ′ en rotation avec la <strong>com</strong>ète autour de Jupiter ainsi que la base polaire(⃗u r , ⃗u θ ) liée à ce référentiel.1. En appliquant le théorème du centre de masse à la <strong>com</strong>ète en mouvement dans le référentiel Jupiterocentrique, exprimer la vitesse ω de rotation de la <strong>com</strong>ète autour de Jupiter. En utilisant le fait que d ≪ r, endéduire la relation :ω 2 ≃ GM Jr 32. Le référentiel R ′ est-il galiléen ? Justifier.3. Faire le bilan <strong>com</strong>plet des forces exercées sur la partie (1) de la <strong>com</strong>ète dans le référentiel R ′ , dansle cas où le contact entre les deux sphères est maintenu, en distinguant les forces intérieures et les forcesextérieures.10
4. En traduisant l’équilibre de la sphère (1) dans le référentiel R ′ , montrer que l’action de contact N 1exercée par la sphère (2) s’écrit de manière approchée :N 1 = GM (Jm m 1)r 2 4M J ɛ 2 − 3ɛoù ɛ = d r ≪ 1.5. En déduire que le contact entre les deux sphères est rompu lorsque la distance r devient inférieure àr lim (r lim est appelée limite de Roche). Exprimer r limR Jen fonction de µ J et µ C . Faire l’application numérique.6. En réalité, les observations ont montré que la fragmentation de la <strong>com</strong>ète s’est produite lorsque celle-ciest arrivée à une distance r 0 = 1, 5R J de Jupiter. Proposer une explication.11