Wellbot2 - montage - Didel.com
Wellbot2 - montage - Didel.com Wellbot2 - montage - Didel.com
http://www.didel.com/ info@didel.com www.didel.com/wellbot/Wbot2Montage.pdf Le kit a peu de pièces et est facile à souder Wellbot2 - montage Liste des pièces 3 x PCB (circuits imprimés) Processeur programmé avec le bootloader Pinguino 2 x strips F05-6 1 x strip F07-6 1 x NiCd 280 mAh 4 x LIT301/HY209 4 x strip F07-2 2 x VID29 motors 2 x roues avec 2 x o-rings 2 x springs Montage Souder dessous les connecteurs pour les capteurs de distance (broches de 0.7mm). Aligner au mieux. Souder l’accu. Centre au mieux Le plus est du côté de l’interrupteur, pastille arrondie. Le – est la patille carrée. Activer l’interrupteur. Les deux petites LEDs doivent s’allumer (une seule si l’accu est déchargé). La LED bleue s’allume àprès 4 secondes.
- Page 2 and 3: Couper à ras les 3 picots plastiqu
- Page 4: Affichage BICO64 Le réseau de 64 L
http://www.didel.<strong>com</strong>/<br />
info@didel.<strong>com</strong><br />
www.didel.<strong>com</strong>/wellbot/Wbot2Montage.pdf<br />
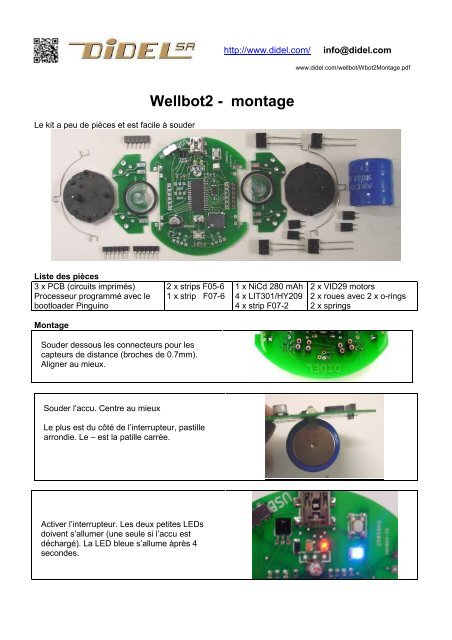
Le kit a peu de pièces et est facile à souder<br />
<strong>Wellbot2</strong> - <strong>montage</strong><br />
Liste des pièces<br />
3 x PCB (circuits imprimés)<br />
Processeur programmé avec le<br />
bootloader Pinguino<br />
2 x strips F05-6<br />
1 x strip F07-6<br />
1 x NiCd 280 mAh<br />
4 x LIT301/HY209<br />
4 x strip F07-2<br />
2 x VID29 motors<br />
2 x roues avec 2 x o-rings<br />
2 x springs<br />
Montage<br />
Souder dessous les connecteurs pour les<br />
capteurs de distance (broches de 0.7mm).<br />
Aligner au mieux.<br />
Souder l’accu. Centre au mieux<br />
Le plus est du côté de l’interrupteur, pastille<br />
arrondie. Le – est la patille carrée.<br />
Activer l’interrupteur. Les deux petites LEDs<br />
doivent s’allumer (une seule si l’accu est<br />
déchargé). La LED bleue s’allume àprès 4<br />
secondes.
Couper à ras les 3 picots plastique du moteur.<br />
Souder les moteurs. Les PCB sont symétriques.<br />
Pour insérer les roues, mettre une cale de 0.2 à<br />
0.4mm pour garantir la distance au circuit<br />
imprimé (papier épais, lame de rasoir).<br />
Ajouter éventuellement une goutte de colle sur<br />
l’extrémité de l’axe. Ne pas utiliser de la CA qui<br />
rendra l’assemblge undémontable.<br />
Souder les circuits moteurs sur le circuit<br />
principal.<br />
Souder en un point, vérifier la perpendicularité,<br />
souder partout. Attendre pour souder dessous<br />
d’avoir terminer les tests..<br />
Placer et souder les deux ressorts d’équilibrage.<br />
Rechauffer les soudures si nécessaire pour placer les<br />
ressorts de façon telle que le robot n’a pas trop de jeu<br />
horizontal<br />
Capteur de distance<br />
Le capteur LIT301/HY209<br />
est une paire LEDs<br />
infrarouge/phototransistor.<br />
Des distances jusqu’à 40<br />
mm peuvent être mesurées<br />
avec un éclairage normal.<br />
Deux paires de capteurs<br />
sont livrées, droite pour le<br />
suivi de piste, coudée pour<br />
détecter les obstacles.<br />
La largeur d’une piste à<br />
suivre est de 15 à 18mm.<br />
Test<br />
Connecté à USB, les leds rouge s’allument et la LED bleue s’allume dans les 4 secondes. Le PC<br />
fait entendre un bip qui montre que USB a été reconnu. Un programme qui fait tourner les moteurs<br />
est parfois chargé.<br />
Les programmes Pinguino peuvent être chargés.
Schéma<br />
Le robot est alimenté par un accu NiMh 3.6V, 280 mAh., permettant un fonctionnement de quelques<br />
heures. La recharge de l’accu se fait via USB simplement au moyen d’une résistance limitant le<br />
courant et dure 8-10 heures si l’accu est <strong>com</strong>plètement déchargé.<br />
Pour mesurer la charge de l’accu, on utilise deux LEDs connectées en série, avec une résistance en<br />
parallèle avec l’une des LEDs. Le résultat est que l’une des LEDs nécessite davantage de tension<br />
que l’autre. En dessous de 3.4V elle ne clignote pas. Le Wellbot peut encore fonctionner longtemps,<br />
mais avec moins de puissance sur les moteurs.<br />
La partie émettrice du capteur de distance est formée de deux LEDs IR en série contrôlées par un<br />
transistor, afin que la consommation soit minimale.<br />
Le bouton-poussoir proche de la LED bleue fait démarrer le bootloader. Le poussoir à l’avant est<br />
sous contrôle du processeur.<br />
Les lignes du portB sont utilisées pour <strong>com</strong>mander les moteurs pas à pas.<br />
Le schéma ci-dessus donne les numéros Pinguino des lignes.<br />
Reprogrammer le 18F2555<br />
Pour reprogrammer le WellBot2 qui a perdu son<br />
bootloader ou que l’on a programmé avec un autre<br />
outil, il faut utiliser le Pickit2 et un adaptateur PK2.<br />
www.didel.<strong>com</strong>/wellbot/Pickit2.pdf
Affichage BICO64<br />
Le réseau de 64 LEDs est décrit ici<br />
www.didel.<strong>com</strong>/wellbot/WeBico.pdf<br />
L’interaction avec l’affichage doit être<br />
programmée en C.<br />
Télé<strong>com</strong>mande<br />
Le Wellbot dispose d’un module IR intégré.<br />
Les utilisateurs peuvent programmer leurs<br />
propres routines afin d’être <strong>com</strong>patibles avec<br />
n’importe quel émetteur IR.<br />
<strong>Didel</strong> supportera la télé<strong>com</strong>mande Emir2 du<br />
robot Bimo avec contrôle proportionnel.<br />
Logiciels <strong>Wellbot2</strong><br />
Le logiciel du Wellbot, écrit en assembleur CALM, n’est pas transportable sur le wellbot2.<br />
Tout doit être ré-écrit en C. Des librairies pour <strong>com</strong>mender les mopteurs et les capteurs de<br />
distance seront mise à disposition au plus vite.<br />
En attendant, le <strong>Wellbot2</strong> est un excellent outil pour apprendre à programmer.<br />
jdn110217


