Interaction sol-structure en centrifugeuse - CFMR
Interaction sol-structure en centrifugeuse - CFMR
Interaction sol-structure en centrifugeuse - CFMR

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
JNGG 2002, 8 et 9 Octobre 2002, Nancy 1<br />
INTERACTION SOL-STRUCTURE EN CENTRIFUGEUSE : RIGIDITES RELATIVES ET<br />
REDISTRIBUTION DES EFFORTS<br />
HOUY Laur<strong>en</strong>t 1 , BREYSSE D<strong>en</strong>is 1 , NIANDOU Halidou 1 , RIOU Christine 2<br />
1 C<strong>en</strong>tre de Développem<strong>en</strong>t des Géosci<strong>en</strong>ces Appliquées, Université Bordeaux I, Bat B18, 33405 Tal<strong>en</strong>ce Cedex,<br />
atlas.cdga.u-bordeaux.fr, l.houy@cdga.u-bordeaux.fr, d<strong>en</strong>ys.breysse@cdga.u-bordeaux.fr, h.niandou@cdga.ubordeaux.fr<br />
2<br />
CEA-CESTA, DEV/SDET/LESR, BP2, 33114 Le Barp, christine.riou@free.fr<br />
RESUME : La variabilité des propriétés mécaniques et géométriques du <strong>sol</strong> peut conduire à des<br />
tassem<strong>en</strong>ts différ<strong>en</strong>tiels sur les ouvrages et générer des désordres. Afin d’optimiser l’insertion de<br />
l’ouvrage dans le <strong>sol</strong>, il est nécessaire de limiter les désordres d’origine géotechnique. Pour cela,<br />
il faut reconnaître, quantifier et modéliser l’hétérogénéité, et égalem<strong>en</strong>t être capable de décrire de<br />
façon satisfaisante les mécanismes d’interaction globale <strong>en</strong>tre le <strong>sol</strong> et l’ouvrage. L’étude d’un<br />
portique hyperstatique à 3 appuis est m<strong>en</strong>ée à l’aide d’un modèle réduit prédim<strong>en</strong>sionné par<br />
élém<strong>en</strong>ts finis et embarqué jusqu’à 100 g sur la c<strong>en</strong>trifugeuse du CEA-CESTA. Différ<strong>en</strong>tes<br />
configurations sont étudiées <strong>en</strong> faisant varier la géométrie du <strong>sol</strong>, le chargem<strong>en</strong>t et la souplesse de<br />
la <strong>structure</strong>. La réponse de l’ouvrage (déformation et déplacem<strong>en</strong>t vertical) est analysée à l’aide<br />
d’un modèle numérique qui permet de mettre <strong>en</strong> évid<strong>en</strong>ce l’int<strong>en</strong>sité des redistributions d’efforts<br />
dans la <strong>structure</strong>.<br />
MOTS-CLEFS : <strong>Interaction</strong> <strong>sol</strong>-<strong>structure</strong> – Variabilité spatiale – Rigidité – Tassem<strong>en</strong>t différ<strong>en</strong>tiel –<br />
Redistribution des efforts<br />
ABSTRACT : Mechanical and geometrical soil variability can induce differ<strong>en</strong>tial settlem<strong>en</strong>ts on<br />
<strong>structure</strong>, and, for some cases, damage can appear. So, soil variability and soil-<strong>structure</strong><br />
interaction should be described to limit the disturbance of geotechnical origin. The reduced scaled<br />
model of an hyperstatic 3-support frame, designed after finite elem<strong>en</strong>t computation, is embarked in<br />
the CEA-CESTA c<strong>en</strong>trifuge, up to 100 g. Differ<strong>en</strong>ts cases are considered with varying ground, load<br />
and stiffness of the <strong>structure</strong>. Numerical model is used to understand the behaviour of <strong>structure</strong><br />
from the strain and settlem<strong>en</strong>t measurem<strong>en</strong>ts. The magnitude of load and forces redistributions is<br />
focussed on.<br />
KEY-WORDS : Sol-<strong>structure</strong> interaction – Spatial Variability – Stiffness – Differ<strong>en</strong>tial settlem<strong>en</strong>t –<br />
Load redistribution<br />
1. Introduction<br />
La variabilité des propriétés mécaniques et géométriques du <strong>sol</strong> peut générer des tassem<strong>en</strong>ts<br />
différ<strong>en</strong>tiels sur les ouvrages, et dans certain cas conduire à des désordres. Lors de la conception,<br />
l’ouvrage est prévu pour pouvoir se déformer, <strong>en</strong> fonction des caractéristiques géométriques de<br />
l’ouvrage et des matériaux de constructions employés. Optimiser l’insertion de l’ouvrage consiste à<br />
limiter les désordres d’origine géotechnique. Pour cela, il faut reconnaître, quantifier et modéliser<br />
l’hétérogénéité, et égalem<strong>en</strong>t être capable de décrire de façon satisfaisante les mécanismes<br />
d’interaction globale <strong>en</strong>tre le <strong>sol</strong> et l’ouvrage.<br />
Le tassem<strong>en</strong>t différ<strong>en</strong>tiel de l’ouvrage est sous le contrôle d’une part, de la variabilité géométrique<br />
et mécanique des <strong>sol</strong>s, et d’autre part, de l’interaction <strong>sol</strong>-ouvrage qui <strong>en</strong> découle (Breysse, 2001).<br />
L’ouvrage transmet des efforts au <strong>sol</strong> qui se déforme ; les déplacem<strong>en</strong>ts qui <strong>en</strong> résult<strong>en</strong>t à l’interface
JNGG 2002, 8 et 9 Octobre 2002, Nancy 2<br />
peuv<strong>en</strong>t modifier s<strong>en</strong>siblem<strong>en</strong>t les contraintes générées par la <strong>structure</strong> et donc les efforts transmis<br />
aux <strong>sol</strong>s. La <strong>sol</strong>ution du système couplé peut être obt<strong>en</strong>ue par une démarche itérative. Le<br />
comportem<strong>en</strong>t non linéaire des matériaux (<strong>sol</strong> de fondation et matériau de construction) et les non<br />
linéarités géométriques peuv<strong>en</strong>t égalem<strong>en</strong>t perturber la redistribution des efforts.<br />
2. Principe de l’interaction <strong>sol</strong>-ouvrage <strong>en</strong> statique<br />
2.1. Modèle étudié<br />
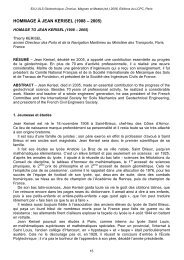
Un portique hyperstatique à 3 appuis soumis à un effort vertical dans chaque travée est étudié<br />
(figure 1). Les appuis sont des semelles non <strong>en</strong>castrées, placées sur un <strong>sol</strong> souple. Les<br />
caractéristiques du portique sont les suivantes :<br />
-aspect géométrique : le portique a une hauteur H, et la longueur de chacune de ses travées<br />
est notée L. Les poteaux et les poutres, de section carrée, ont pour largeur respective a M et a T .<br />
-aspect mécanique : le module d’élasticité ainsi que l’inertie sont respectivem<strong>en</strong>t notés E M et<br />
I M pour les poteaux, et E T et I T pour les poutres.<br />
La <strong>structure</strong> est soumise à un chargem<strong>en</strong>t vertical, celui-ci peut être une charge répartie d’int<strong>en</strong>sité<br />
p, ou un effort ponctuel F, conc<strong>en</strong>tré au milieu de la travée. La maquette repose sur un <strong>sol</strong> supposé<br />
élastique et limité à sa base par un substratum considéré comme infinim<strong>en</strong>t rigide. Soit h s<br />
l’épaisseur du sable et E s son module d’élasticité.<br />
Figure 1 : Système <strong>sol</strong>-ouvrage soumis à un chargem<strong>en</strong>t réparti<br />
2.2. Principe de l’interaction<br />
Lors de la conception, <strong>en</strong> fonction des efforts internes calculés par la desc<strong>en</strong>te de charge,<br />
l’ingénieur vérifie le dim<strong>en</strong>sionnem<strong>en</strong>t des semelles qui, généralem<strong>en</strong>t, sont supposées fixes. En<br />
fonction des efforts appliqués à la <strong>structure</strong>, les appuis tass<strong>en</strong>t et induis<strong>en</strong>t une redistribution des
JNGG 2002, 8 et 9 Octobre 2002, Nancy 3<br />
efforts internes, ce qui modifie le déplacem<strong>en</strong>t des appuis… Le phénomène se poursuit jusqu’à<br />
t<strong>en</strong>dre vers une situation d’équilibre ou provoque l’<strong>en</strong>dommagem<strong>en</strong>t de l’ouvrage.<br />
Le déplacem<strong>en</strong>t des appuis et les efforts exercés aux appuis sont reliés par la rigidité, selon la<br />
formule :<br />
F = kδ. (1)<br />
Dans notre cas, chaque appui possède une rigidité à trois degrés de liberté : une rigidité verticale k v ,<br />
une rigidité horizontale k h et une rigidité de rotation k c . En connaissant la valeur de la rigidité, on<br />
peut recalculer les efforts internes, ou les déplacem<strong>en</strong>ts d’appui. Le concept de rigidité est une<br />
approche simplifiée du milieu continu que constitue le <strong>sol</strong> ; il suppose une indép<strong>en</strong>dance<br />
pratique <strong>en</strong>tre les différ<strong>en</strong>tes composantes.<br />
3. Simulation sur modèle réduit <strong>en</strong> c<strong>en</strong>trifugeuse<br />
3.1. Principe de la simulation<br />
La simulation est basée sur l’étude du comportem<strong>en</strong>t de la <strong>structure</strong> <strong>en</strong> fonction du chargem<strong>en</strong>t<br />
imposé. Celui-ci induit des efforts internes dans la <strong>structure</strong> et des déplacem<strong>en</strong>ts d’appuis. Afin<br />
d’analyser le comportem<strong>en</strong>t, la déformation ainsi que les tassem<strong>en</strong>ts d’appuis sont mesurés. A partir<br />
de ces mesures, la redistribution des efforts <strong>en</strong> fonction des déplacem<strong>en</strong>ts d’appuis est étudiée.<br />
La géométrie du sous-<strong>sol</strong> (épaisseur du milieu déformable et p<strong>en</strong>te du substratum) ainsi que le type<br />
de chargem<strong>en</strong>t (symétrie ou dissymétrie <strong>en</strong>tre les travées) sont modifiés pour vérifier leur influ<strong>en</strong>ce.<br />
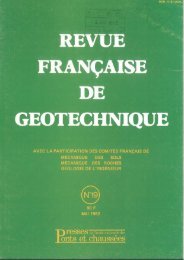
La simulation a été conduite sur la c<strong>en</strong>trifugeuse Latéocère 265 (Figure 2) du CEA CESTA (C<strong>en</strong>tre<br />
d’Etude Sci<strong>en</strong>tifique et Technique d’Aquitaine). La c<strong>en</strong>trifugeuse est <strong>en</strong> activité depuis 1964 et a<br />
pour rayon de trajectoire 10 m (Corté et Garnier, 1986). La masse maximale embarquée est de 2,2 t,<br />
pour une accélération maximale de 100 g à 10 m.<br />
Figure 2. La C<strong>en</strong>trifugeuse du CEA-CESTA
JNGG 2002, 8 et 9 Octobre 2002, Nancy 4<br />
3.2. Conception du modèle réduit<br />
La méthode des élém<strong>en</strong>ts finis a été employée pour concevoir le modèle et définir les gammes des<br />
capteurs et des jauges de déformation (Lacaze, 2000). L’ouvrage simulé est un portique<br />
hyperstatique sur 3 appuis soumis à un chargem<strong>en</strong>t réparti uniforme. Le noeud situé à l’intersection<br />
de l’appui c<strong>en</strong>tral et des deux travées peut simuler une articulation ou un <strong>en</strong>castrem<strong>en</strong>t, <strong>en</strong> fonction<br />
de la rigidité de l’ouvrage souhaitée. Les caractéristiques du portique, sont :<br />
- ses dim<strong>en</strong>sions : L = 25 m, H = 6 m, B 1 = B 3 = 1m, B 2 = 3,3 m et a M = a T = 1 m²<br />
- ses propriétés mécaniques : E M = E T = 15 000 MPa<br />
La modélisation par modèle réduit nécessite le respect des lois de similitude (Tableau 1). Les<br />
propriétés mécaniques du prototype (ouvrage à l’échelle 1) et du modèle réduit (échelle 1/n) sont<br />
id<strong>en</strong>tiques. Avec la c<strong>en</strong>trifugeuse, l’accélération maximale n est de 100 g, ce qui autorise un modèle<br />
réduit à l’échelle 1/100 (Garnier, 1995).<br />
3.3. Dispositif expérim<strong>en</strong>tal<br />
Tableau 1. Lois de similitude<br />
Grandeur physique Facteur d’échelle<br />
Masse volumique 1<br />
Longueur 1/n<br />
Déplacem<strong>en</strong>t 1/n<br />
Déformation 1<br />
Force<br />
1/n²<br />
Mom<strong>en</strong>t 1/n 3<br />
Accélération<br />
n<br />
La maquette utilisée est un portique mécano-soudé à 3 appuis <strong>en</strong> alliage d’aluminium. Le module<br />
(E M = E T ) déterminé expérim<strong>en</strong>talem<strong>en</strong>t vaut 28 500 MPa. La spécificité de ce portique est la<br />
possibilité de modifier sa rigidité. En effet, le nœud c<strong>en</strong>tral, situé à l’intersection des travées et du<br />
poteau c<strong>en</strong>tral, peut simuler un <strong>en</strong>castrem<strong>en</strong>t ou une articulation, <strong>en</strong> fonction du serrage du boulon<br />
et de l’écrou (figure 3).<br />
Afin de multiplier le nombre de simulations, deux maquettes du prototype sont placées dans 2 bacs<br />
distincts situés sur la même nacelle. Les bacs ont pour dim<strong>en</strong>sions 0,75 m * 0,5 m. Chaque<br />
maquette est équipée de 18 jauges de déformations, lesquelles sont positionnées de manière à<br />
fonctionner <strong>en</strong> couple. De plus, deux capteurs de déplacem<strong>en</strong>ts sont placés au droit d’un appui<br />
latéral et de l’appui c<strong>en</strong>tral. Un cinquième capteur mesure les déplacem<strong>en</strong>ts verticaux du <strong>sol</strong> d’un<br />
des deux bacs. Le rajout de 2 semelles latérales (2,2*2,2 cm) ainsi que d’une semelle c<strong>en</strong>trale<br />
(3,3*3 cm) sous chaque appui améliore la stabilité transversale de la <strong>structure</strong>. La <strong>structure</strong> est<br />
soumise à un chargem<strong>en</strong>t conc<strong>en</strong>tré au milieu de chaque travée. Le chargem<strong>en</strong>t peut être symétrique<br />
ou dissymétrique.<br />
Le substratum indéformable est simulé par une plaque <strong>en</strong> aluminium lisse, supposé infinim<strong>en</strong>t<br />
rigide (E = 70 000 MPa), dont la p<strong>en</strong>te peut être nulle, de 8° ou de 17°. Le <strong>sol</strong> est un sable dont le<br />
d 50 = 0,15 mm (Gemperline, 1988). Le sable est mis <strong>en</strong> place par pluviation (Ch<strong>en</strong> et al, 1998), à<br />
hauteur constante par rapport au bord des bacs. Le poids volumique est de 14 kN.m -3 .
JNGG 2002, 8 et 9 Octobre 2002, Nancy 5<br />
Figure 3. Dispositif expérim<strong>en</strong>tal<br />
Après une première séqu<strong>en</strong>ce de con<strong>sol</strong>idation du sable sans les portiques, la rotation de la<br />
c<strong>en</strong>trifugeuse débute avec les portiques chargés, et posés sur le sable. L’accélération jusqu’à 100 g<br />
est progressive, avec des paliers intermédiaires à 10, 20, 40, 50, 60 et 80 g. Après le palier à 100 g,<br />
la vitesse de rotation décroît avec de nouveau des paliers à 50, 20 et 10 g.<br />
Différ<strong>en</strong>tes configurations sont étudiées, <strong>en</strong> fonction de la p<strong>en</strong>te du substratum, de la hauteur de<br />
sable sous les appuis et de la symétrie ou de la dissymétrie du chargem<strong>en</strong>t ponctuel sur les travées.<br />
4. Résultats de la simulation <strong>en</strong> c<strong>en</strong>trifugeuse<br />
Nous nous limiterons ici à l’analyse du portique hyperstatique (celui dont l’<strong>en</strong>castrem<strong>en</strong>t au c<strong>en</strong>tre<br />
est bloqué) <strong>en</strong> prés<strong>en</strong>ce d’un substratum à fond plat (Hs = 0,25 m) et soumis à une accélération de<br />
100 g. Le chargem<strong>en</strong>t est symétrique (F 1 = F 2 = 2 N à 1g) (soit 20 kN à l’échelle 1). La rigidité<br />
verticale est calculée pour l’appui c<strong>en</strong>tral et l’appui latéral à partir des efforts internes calculés et<br />
des mesures de déplacem<strong>en</strong>ts.<br />
L’<strong>en</strong>registrem<strong>en</strong>t des déformations permet de calculer les valeurs de réactions aux appuis <strong>en</strong><br />
fonction de l’effort appliqué. Le nombre élevé de jauges de déformation permet de déterminer<br />
l’<strong>en</strong>semble des efforts internes qui offre le meilleur compromis. Les efforts internes déduits des<br />
différ<strong>en</strong>tes équations de mom<strong>en</strong>ts fléchissants sont :<br />
Appui latéral : V 1 = 84,2 N H 1 = 13,4 N M 1 = 0,07 N.m<br />
Appui c<strong>en</strong>tral : V 2 = 223,6 N H 2 = 3,3 N M 2 = - 0,16 N.m<br />
Appui latéral : V 3 = 86,1 N H 3 = -16,7 N M 3 = - 0,13 N.m<br />
Cette procédure d’analyse est complexe, le nombre de mesures excédant (volontairem<strong>en</strong>t) celui<br />
strictem<strong>en</strong>t nécessaire à l’inversion du système d’équations, aucune <strong>sol</strong>ution théorique n’est<br />
strictem<strong>en</strong>t compatible avec l’<strong>en</strong>semble des mesures et avec la simple vérification de l’équilibre<br />
statique. Ainsi, V1 + V2 + V3 n’approche 400 N qu’avec une erreur de 2 %.
JNGG 2002, 8 et 9 Octobre 2002, Nancy 6<br />
L’établissem<strong>en</strong>t de la courbe de mom<strong>en</strong>t fléchissant calculé à partir des efforts internes est<br />
comparée sur les valeurs expérim<strong>en</strong>tales (figure 4). Les valeurs de mom<strong>en</strong>ts fléchissants déduites<br />
pour x = 0, L/2 et L sont respectivem<strong>en</strong>t : -0,8, 4,24 et -2,70 N.m.<br />
-3<br />
Poutre<br />
-2<br />
mom<strong>en</strong>t fléchissant (N.m-1)<br />
-1<br />
0<br />
1<br />
2<br />
3<br />
4<br />
0 0,02 0,04 0,06 0,08 0,1 0,12<br />
mf calculé<br />
mf mesuré<br />
5<br />
Longueur de la travée (m)<br />
Figure 4. Courbe de mom<strong>en</strong>ts fléchissants pour une travée<br />
Les courbes de déplacem<strong>en</strong>t <strong>en</strong> fonction du temps sont altérées aux fortes accélérations (figure 5).<br />
Ce phénomène est lié au décollem<strong>en</strong>t inopiné du film disposé sur le sable pour empêcher son <strong>en</strong>vol.<br />
5,2<br />
4,8<br />
4,4<br />
sem latérale<br />
<strong>sol</strong><br />
sem c<strong>en</strong>trale<br />
Déplacem<strong>en</strong>t (mm)<br />
4<br />
3,6<br />
3,2<br />
2,8<br />
2,4<br />
2<br />
1,6<br />
1,2<br />
0,8<br />
0,4<br />
accélération = 100 g<br />
0<br />
00:00 05:00 10:00 15:00 20:00 25:00 30:00 35:00 40:00 45:00 50:00 55:00<br />
Temps (min : s)<br />
Figure 5. Déplacem<strong>en</strong>t vertical des appuis <strong>en</strong> fonction du temps
JNGG 2002, 8 et 9 Octobre 2002, Nancy 7<br />
Quoique le sable soit déjà tassé lors de la rotation à vide, le tassem<strong>en</strong>t mesuré n’est pas totalem<strong>en</strong>t<br />
réversible (figure 6). Les courbes de la figure révèl<strong>en</strong>t aussi son caractère non linéaire, au<br />
chargem<strong>en</strong>t comme au déchargem<strong>en</strong>t. Dans un souci de simplification, on négligera cep<strong>en</strong>dant cet<br />
aspect, dans un premier temps <strong>en</strong> calculant des rigidités équival<strong>en</strong>tes, à partir des déplacem<strong>en</strong>ts<br />
mesurés <strong>en</strong>tre 0 et 40 g. ou <strong>en</strong>tre 0 et 100 g.<br />
Les déplacem<strong>en</strong>ts mesurés doiv<strong>en</strong>t aussi être traités de façon à n’<strong>en</strong> conserver que la partie<br />
provoquée par le portique, <strong>en</strong> déduisant celle du au tassem<strong>en</strong>t du massif sous son propre poids. A<br />
cet effet, on utilise les mesures du capteur de référ<strong>en</strong>ce, et les simulations élém<strong>en</strong>ts finis qui<br />
permett<strong>en</strong>t de connaître ce que serait le tassem<strong>en</strong>t du <strong>sol</strong> non chargé à l’emplacem<strong>en</strong>t du portique.<br />
Dans notre configuration, à 100 g, les valeurs de tassem<strong>en</strong>t sont pour l’appui latéral δ 1 = 0,99 mm et<br />
pour l’appui c<strong>en</strong>tral δ 2 = 1,44 mm.<br />
120<br />
100<br />
Accélération (nbre de g)<br />
80<br />
60<br />
40<br />
sem latérale<br />
<strong>sol</strong><br />
sem c<strong>en</strong>trale<br />
20<br />
0<br />
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5<br />
Déplacem<strong>en</strong>t (mm)<br />
Figure 6. Déplacem<strong>en</strong>t vertical des appuis <strong>en</strong> fonction de l’accélération<br />
A partir de l’équation (1), on détermine la rigidité des appuis <strong>en</strong> t<strong>en</strong>ant compte des efforts internes<br />
et des déplacem<strong>en</strong>ts, soit K v1 ou 3 = 86000 N.m -1 et K v2 = 155300 N.m -1 .<br />
5. Approche numérique de l’interaction <strong>sol</strong> -<strong>structure</strong><br />
5.1. Modèle numérique du portique et calculs des efforts<br />
La difficulté du phénomène d’interaction est de déterminer la rigidité de chacun des appuis afin<br />
d’<strong>en</strong> t<strong>en</strong>ir compte dans le calcul. Différ<strong>en</strong>tes méthodes exist<strong>en</strong>t pour connaître la rigidité : par des<br />
mesures de réaction et de déplacem<strong>en</strong>t sur un modèle embarqué, par une simulation numérique du<br />
continuum (<strong>en</strong> modélisant le comportem<strong>en</strong>t du <strong>sol</strong> et du contact <strong>sol</strong>-semelle à partir du module<br />
supposé du <strong>sol</strong>), où <strong>en</strong>fin par l’utilisation d’une formule semi-empirique de la géotechnique (pour
JNGG 2002, 8 et 9 Octobre 2002, Nancy 8<br />
k v ) couplé avec un modèle ’’rdm’’ ; dans cette partie, seule la dernière méthode est prés<strong>en</strong>tée. Les<br />
aspects non linéaires liés à la plasticité du <strong>sol</strong> et aux non linéarités géométriques à l’interface <strong>sol</strong>semelle<br />
ne sont pas pris <strong>en</strong> compte.<br />
Le déplacem<strong>en</strong>t vertical, horizontal et de rotation dép<strong>en</strong>d de la rigidité pour chacun de ces degrés de<br />
liberté. La rigidité est fonction de la géométrie de la semelle et des propriétés du <strong>sol</strong> (matériaux mis<br />
<strong>en</strong> jeu et géométrie du sous-<strong>sol</strong>). La formule de Ménard (Ménard, 1975) appliquée à une <strong>structure</strong> à<br />
plusieurs appuis exprime le tassem<strong>en</strong>t de chaque appui <strong>en</strong> fonction des parties déviatoriques (indice<br />
’’d’’) et sphériques (indice ’’c’’) lié au tassem<strong>en</strong>t local sous la semelle (indice ’’sem’’) et au<br />
tassem<strong>en</strong>t de l’<strong>en</strong>semble de la <strong>structure</strong> (indice ’’<strong>en</strong>s’’) :<br />
S = S + S + S + S<br />
(2)<br />
tot<br />
c sem<br />
d sem<br />
c <strong>en</strong>s<br />
d <strong>en</strong>s<br />
La ré<strong>sol</strong>ution du système est effectuée à partir de la méthode des forces avec des appuis élastiques<br />
dont la rigidité équival<strong>en</strong>te est calculée par itération : une rigidité est introduite dans le calcul, cela<br />
génère des redistributions d’efforts dans la <strong>structure</strong>, et modifie les tassem<strong>en</strong>ts aux appuis.<br />
En considérant les trois degrés de liberté de rigidité pour chacun des appuis, la ré<strong>sol</strong>ution du<br />
système hyperstatique soumis à un chargem<strong>en</strong>t réparti p, ou conc<strong>en</strong>tré F au milieu de la travée,<br />
s’exprime selon f(V 1 , H 1 , M 1 , V 2 , H 2 , M 2 , V 3 , H 3 , M 3 , H, L, E T , E M , I T , I M , p 1 ou F 1 , p 2 ou F 2 , kv 1 ,<br />
kh 1 , kc 1 , kv 2 , kh 2 , kc 2, kv 3 , kh 3 , kc 3 ) = 0. La <strong>sol</strong>ution fournit les valeurs des efforts exercés sur les<br />
appuis, à partir desquelles on déduit la valeur du déplacem<strong>en</strong>t sous chaque appui.<br />
Par la suite, le modèle numérique est exploité afin de vérifier le rôle effectif des rigidités d’appui et<br />
de déterminer la redistribution des efforts.<br />
5.2. Evaluation de la rigidité des appuis<br />
5.2.1 Contraste <strong>sol</strong>-<strong>structure</strong><br />
Le modèle numérique permet de vérifier l’influ<strong>en</strong>ce des rigidités d’appuis sur le comportem<strong>en</strong>t de<br />
l’ouvrage, étudié ici à l’échelle du modèle réduit. Le rapport de rigidité <strong>en</strong>tre le <strong>sol</strong> et la <strong>structure</strong><br />
influ<strong>en</strong>ce la valeur des efforts internes, et par conséqu<strong>en</strong>t les déplacem<strong>en</strong>ts (tableau 2). Les calculs<br />
sont m<strong>en</strong>és <strong>en</strong> faisant varier K v et <strong>en</strong> gardant E s constant. Les mêmes résultats serai<strong>en</strong>t obt<strong>en</strong>us <strong>en</strong><br />
faisant varier E s à K v constant.<br />
Tableau 2 : Influ<strong>en</strong>ce de la rigidité relative <strong>en</strong>tre le <strong>sol</strong> et la <strong>structure</strong><br />
K v (précisée), K h et K c t<strong>en</strong>d<strong>en</strong>t vers Déplacem<strong>en</strong>t (m) Mom<strong>en</strong>t fléchissant (N.m)<br />
l’infini<br />
K v (N.m -1 ) V 1 ou 3 (N) V 2 (N) δ 1 ou δ 3 δ 2 x = 0 x = L/2 x = L<br />
1,00E+00 133,33 133,33 133,33 133,33 -4,486 3,514 -0,486<br />
1,00E+05 123,90 152,21 1,2*10 E -3 1,5*10 E -3 -3,978 3,456 -1,110<br />
1,00E+10 88,22 223,56 8,8*10 E -9 2,2*10 E -8 -2,057 3,236 -3,471<br />
La configuration expérim<strong>en</strong>tale est <strong>en</strong>cadrée par deux cas extrêmes :<br />
-une <strong>structure</strong> infinim<strong>en</strong>t souple par rapport au terrain, cela correspond au cas d’une poutre<br />
continue sur 3 appuis. C’est la situation du portique lorsque la rigidité verticale k v de chacun des<br />
appuis t<strong>en</strong>d vers l’infini :<br />
V ou 3<br />
5H + 8L<br />
= F et V 2 = (F1 + F2) – (V 1 + V 3 ) (3) et (4)<br />
16(H L)<br />
1<br />
+
JNGG 2002, 8 et 9 Octobre 2002, Nancy 9<br />
-une <strong>structure</strong> infinim<strong>en</strong>t raide par rapport au terrain, ce qui revi<strong>en</strong>t à traiter le cas d’un<br />
radier rigide, dans ce cas la rigidité k v de chacun des appuis du portique t<strong>en</strong>d vers zéro.<br />
V 1 ou 3 = V 2 = (2/3)F (5)<br />
La conséqu<strong>en</strong>ce directe de la redistribution des efforts selon le rapport de rigidité <strong>sol</strong>-<strong>structure</strong> est<br />
une modification des valeurs de mom<strong>en</strong>t fléchissant, les mom<strong>en</strong>ts fléchissants étant d’autant plus<br />
négatifs sur l’appui c<strong>en</strong>tral que la rigidité augm<strong>en</strong>te.<br />
5.2.2 Contraste <strong>en</strong>tre appuis<br />
A ce rapport de rigidité, s’ajoute le rapport de rigidité <strong>en</strong>tre les appuis. L’étude de K v est réalisée<br />
pour des valeurs voisines de 1 E +05 N.m, qui correspond<strong>en</strong>t à l’ordre de grandeur des rigidités<br />
d’appui évaluées <strong>en</strong> c<strong>en</strong>trifugeuse. Deux hypothèses sont considérées :<br />
-la première suppose que les rigidités horizontales et de rotation t<strong>en</strong>d<strong>en</strong>t toujours vers<br />
l’infini (Tableau 3). Dans ce cas, la réaction verticale t<strong>en</strong>d à se conc<strong>en</strong>trer sous l’appui le plus<br />
raide ; les composantes horizontales aux appuis sont du même de grandeur que les composantes<br />
verticales.<br />
Tableau 3 : Influ<strong>en</strong>ce de la rigidité relative <strong>en</strong>tre une semelle latérale et une semelle c<strong>en</strong>trale (K v précisée, K h et K c<br />
t<strong>en</strong>d<strong>en</strong>t vers l’infini)<br />
K v (N.m -1 ) V (N) Mom<strong>en</strong>t fléchissant (N.m)<br />
Appui 1 ou 3 Appui 2 Appui 1 ou 3 Appui 2 x = 0 x = L/2 x = L H 1 (N) M 1 (N.m)<br />
1,00E+05 1,00E+05 123,90 152,21 -3,98 3,46 -1,11 108,47 -1,99<br />
1,00E+05 6,00E+04 143,69 112,62 -5,04 3,58 0,20 137,52 -2,52<br />
1,00E+05 1,00E+06 55,18 289,64 -0,28 3,03 -5,66 7,60 -0,14<br />
6,00E+04 1,00E+05 105,38 189,24 -2,98 3,34 -2,34 81,28 -1,49<br />
2,00E+05 1,00E+05 142,71 114,59 -4,99 3,57 0,13 136,07 -2,49<br />
1,00E+06 1,00E+05 162,43 75,13 -6,05 3,69 1,44 165,03 -3,02<br />
-<strong>en</strong> réalité, les rigidités horizontale et de rotation ne sont pas infinies, ce que confirm<strong>en</strong>t les<br />
faibles valeurs de H et M id<strong>en</strong>tifiées sur la maquette embarquée. Ainsi, on peut supposer que la<br />
rigidité K h est une fraction de K v (K h = 1/10K v ) et K c est faible (10 N.m.rad -1 ) (Tableau 4).<br />
Tableau 4 : Influ<strong>en</strong>ce de la rigidité relative <strong>en</strong>tre une semelle latérale et une semelle c<strong>en</strong>trale (Kv précisée, Kh = 1/10 Kv<br />
et K c = 10 N.m.rad -1 )<br />
K v (N.m -1 ) V (N) Mom<strong>en</strong>t fléchissant (N.m)<br />
Appui 1<br />
Appui 1<br />
Appui 2<br />
Appui 2 x = 0 x = L/2 x = L H<br />
ou 3<br />
ou 3<br />
1 (N) M 1 (N.m)<br />
1,00E+05 1,00E+05 104,666 190,67 -0,54 5,74 0,02 7,369 0,131<br />
1,00E+05 1,00E+03 197,593 4,81 -1,45 10,41 10,26 19,896 0,353<br />
1,00E+05 1,00E+04 178,862 42,28 -1,26 9,47 8,20 17,371 0,309<br />
1,00E+05 6,00E+04 124,339 151,32 -0,73 6,73 2,19 10,021 0,178<br />
1,00E+05 2,00E+05 81,571 236,86 -0,31 4,58 -2,52 4,256 0,076<br />
1,00E+05 5,00E+05 61,430 277,14 -0,11 3,57 -4,74 1,541 0,027<br />
1,00E+05 1,00E+06 53,102 293,80 -0,03 3,16 -5,66 0,418 0,007<br />
1,00E+05 1,00E+07 44,703 310,59 0,05 2,73 -6,58 -0,714 -0,013<br />
6,00E+04 1,00E+05 92,065 215,87 -0,31 5,22 -1,26 3,607 0,107<br />
2,00E+05 1,00E+05 118,323 163,35 -1,03 6,07 1,17 16,132 0,142<br />
1,00E+06 1,00E+05 142,695 114,61 -3,11 5,46 2,02 54,881 0,087
JNGG 2002, 8 et 9 Octobre 2002, Nancy 10<br />
Dans les deux configurations limites (K v2 = 1/10 K v1 ou K v1 = 1/10 K v2 ), le contraste <strong>en</strong>tre les<br />
réactions d’appuis est plus faible si l’on considère des rigidités horizontales et <strong>en</strong> rotation réalistes.<br />
Cette hypothèse conduit à des valeurs de H, tout à fait compatibles avec les mesures sur maquettes.<br />
La différ<strong>en</strong>ce des résultats des tableaux 3 et 4 confirme le rôle ess<strong>en</strong>tiel des rigidités. On peut<br />
préciser ce rôle <strong>en</strong> faisant varier K h et K c , tout <strong>en</strong> gardant K v constant (Tableau 5). Les résultats<br />
montr<strong>en</strong>t que les réactions horizontales et les mom<strong>en</strong>ts à l’appui sont beaucoup plus s<strong>en</strong>sibles à ces<br />
variations que ne le sont les réactions verticales.<br />
Tableau 5 : Influ<strong>en</strong>ce des rigidités horizontales et de rotation<br />
Mom<strong>en</strong>t fléchissant (N.m)<br />
K h (N.m -1 ) K c (N.rad -1 ) V 1 (N) V 2 (N) x = 0 x = L/2 x = L H 1 (N) M 1 (N.m)<br />
1,00E+20 1,00E+20 123,90 152,21 -3,98 3,46 -1,11 108,47 -1,99<br />
1,00E+20 1,00E+01 122,87 154,27 -3,79 3,58 -1,05 69,24 -0,01<br />
1,00E+05 1,00E+01 113,57 172,86 -2,13 4,68 -0,50 37,64 0,06<br />
5,00E+04 1,00E+01 110,10 179,80 -1,51 5,10 -0,30 25,84 0,09<br />
5,00E+05 1,00E+01 119,94 160,12 -3,27 3,93 -0,88 59,28 0,01<br />
1,00E+05 1,00E+02 114,48 171,03 -2,29 4,58 -0,56 33,05 0,48<br />
1,00E+05 1,00E+00 113,45 173,09 -2,11 4,70 -0,49 38,23 0,01<br />
L’<strong>en</strong>semble de ces résultats souligne le soin qu’il convi<strong>en</strong>t d’apporter à la modélisation des raideurs<br />
d’appui si l’on souhaite apprécier correctem<strong>en</strong>t les redistributions d’efforts dans la <strong>structure</strong>.<br />
5.3. Effets du contraste de rigidité <strong>en</strong>tre les appuis sur les efforts internes.<br />
Les figures 7, 8 et 9 traduis<strong>en</strong>t les résultats du tableau 4, avec <strong>en</strong> référ<strong>en</strong>ce les valeurs du portique<br />
<strong>en</strong>castré. Elles confirm<strong>en</strong>t que, même pour des variations de rigidités sous appuis tout à fait<br />
raisonnable (1/10 à 10), pouvant découler de la variabilité des terrains ou de défauts locaux, les<br />
mom<strong>en</strong>ts fléchissants dans la poutre horizontale peuv<strong>en</strong>t être très significativem<strong>en</strong>t modifiés.<br />
V1ou3 ou V2 (N)<br />
350,00<br />
300,00<br />
250,00<br />
200,00<br />
150,00<br />
100,00<br />
V1ou3<br />
V2<br />
référ<strong>en</strong>ce<br />
50,00<br />
0,00<br />
0,01 0,1 1 10 100<br />
K v1 ou 3 /K V2<br />
Figure 7 : Réaction aux appuis, K v1 = 1 E +5 N.m
JNGG 2002, 8 et 9 Octobre 2002, Nancy 11<br />
45,00<br />
V1ou3/V2 (N)<br />
40,00<br />
35,00<br />
30,00<br />
25,00<br />
20,00<br />
15,00<br />
10,00<br />
5,00<br />
V1ou3/V2<br />
référ<strong>en</strong>ce<br />
0,00<br />
0,01 0,1 1 10 100<br />
K v1 ou 3 /KV 2<br />
Figure 8 : Rapport V 1ou3/V 2, K v1 = 1 E +5 N.m<br />
mom<strong>en</strong>t fléchissant (N.m)<br />
x = 0<br />
x = L/2<br />
x = L<br />
x= 0, référ<strong>en</strong>ce<br />
x= L/2, référ<strong>en</strong>ce<br />
x= L, référ<strong>en</strong>ce<br />
12,00<br />
10,00<br />
8,00<br />
6,00<br />
4,00<br />
2,00<br />
0,00<br />
-2,00<br />
-4,00<br />
-6,00<br />
-8,00<br />
1,00E-02 1,00E-01 1,00E+00 1,00E+01 1,00E+02<br />
K v1 ou 3 /K V2<br />
Figure 9 : Profil de mom<strong>en</strong>ts fléchissants, K v1 = 1 E +5 N.m<br />
Ainsi, par rapport au cas de référ<strong>en</strong>ce ’’rdm ’’, le mom<strong>en</strong>t fléchissant à mi-portée varie de -16 % à<br />
+222 % et le mom<strong>en</strong>t fléchissant sur l’appui c<strong>en</strong>tral peut être augm<strong>en</strong>té de 396 % (appui c<strong>en</strong>tral très<br />
raide) ou, au contraire, changer de signe !
JNGG 2002, 8 et 9 Octobre 2002, Nancy 12<br />
6. Conclusion<br />
L’utilisation des valeurs expérim<strong>en</strong>tales de déplacem<strong>en</strong>ts et de déformations dans le modèle<br />
numérique confirme l’importance de la rigidité d’appui. Le modèle numérique et les valeurs<br />
expérim<strong>en</strong>tales soulign<strong>en</strong>t la nécessité de pr<strong>en</strong>dre <strong>en</strong> compte le rapport de rigidité <strong>en</strong>tre les appuis,<br />
rapport qui prédomine sur celui <strong>en</strong>tre le <strong>sol</strong> et la <strong>structure</strong> dans le cas des tassem<strong>en</strong>ts différ<strong>en</strong>tiels.<br />
La prise <strong>en</strong> compte de ce rapport permettrait une meilleure compréh<strong>en</strong>sion du phénomène de<br />
tassem<strong>en</strong>ts différ<strong>en</strong>tiels et une meilleure prédiction des risques de dommages sur les ouvrages.<br />
Les non linéarités matérielles, du fait de l’<strong>en</strong>dommagem<strong>en</strong>t ou de la plasticité de l’ouvrage, devront<br />
faire l’objet d’études ultérieures ainsi que l’effet de la variabilité spatiale des propriétés du <strong>sol</strong>.<br />
7. Bibliographie<br />
Breysse D. Les <strong>en</strong>jeux <strong>en</strong> modélisations des terrains et des <strong>structure</strong>s pour décrire aux mieux<br />
l’interaction <strong>sol</strong>-ouvrage. Confér<strong>en</strong>ce Albert Caquot : Modélisation et simulation <strong>en</strong> Génie<br />
Civil : de la pratique à la théorie. Paris, 120 p, 3/5 Octobre 2001.<br />
Ch<strong>en</strong> H.-T., Lee C.-H., Ch<strong>en</strong> H.-W., The traveling apparatus for sand specim<strong>en</strong> preparation, in<br />
C<strong>en</strong>trifuge 98, Balkema, pp 143-148, 1998.<br />
Corté J.-F., Garnier J., Une c<strong>en</strong>trifugeuse pour la recherche <strong>en</strong> géotechnique. Bulletin de Liaison<br />
des Laboratoires des Ponts et Chaussées, n°146, pp5-28, 1986.<br />
Garnier J., Modèles réduit <strong>en</strong> mécanique des <strong>sol</strong>s. Confér<strong>en</strong>ce : Les modèles réduits <strong>en</strong> Génie Civil.<br />
Nantes, pp 21-44, 18 Mai 1995.<br />
Gemperline M.C., Coupled effect of common variables on the behaviour of shallow foundation in<br />
cohesionless soils, in C<strong>en</strong>trifuge 88, Balkema, pp 285-292,1988.<br />
Lacaze C. <strong>Interaction</strong> <strong>sol</strong>-<strong>structure</strong> dans le cas de tassem<strong>en</strong>ts différ<strong>en</strong>tiels : prédim<strong>en</strong>sionnem<strong>en</strong>t<br />
d’un essai sur modèle réduit. Mémoire de DEA ENPC, ENSMP, UMLV, 46 p, 2000.<br />
Ménard L. Le pressiomètre, règles d’utilisation des techniques pressiométriques et d’exploitation<br />
des résultats obt<strong>en</strong>us pour le calcul des fondations, Notice Générale. Soc. L. Ménard, 1975.<br />
Vaillant J.M., Mroueh H., Shahrour I., Influ<strong>en</strong>ce de la rigidité <strong>sol</strong>-<strong>structure</strong> dans le calcul<br />
d’interaction <strong>sol</strong>-<strong>structure</strong>, R<strong>en</strong>contres AUGC-AFGC-IREX, Toulouse, CD, 30-31 Mai 2002