Electrotechnique Sciences appliquees en 28 fiches - Numilog
Electrotechnique Sciences appliquees en 28 fiches - Numilog
Electrotechnique Sciences appliquees en 28 fiches - Numilog

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
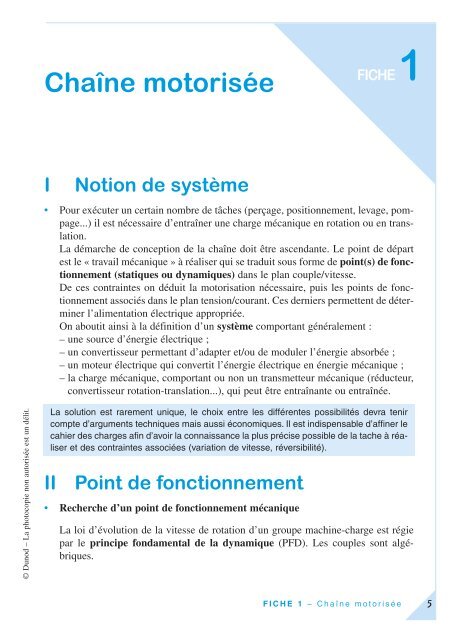
Chaîne motorisée<br />
FICHE1<br />
I<br />
Notion de système<br />
• Pour exécuter un certain nombre de tâches (perçage, positionnem<strong>en</strong>t, levage, pompage...)<br />
il est nécessaire d’<strong>en</strong>traîner une charge mécanique <strong>en</strong> rotation ou <strong>en</strong> translation.<br />
La démarche de conception de la chaîne doit être asc<strong>en</strong>dante. Le point de départ<br />
est le « travail mécanique » à réaliser qui se traduit sous forme de point(s) de fonctionnem<strong>en</strong>t<br />
(statiques ou dynamiques) dans le plan couple/vitesse.<br />
De ces contraintes on déduit la motorisation nécessaire, puis les points de fonctionnem<strong>en</strong>t<br />
associés dans le plan t<strong>en</strong>sion/courant. Ces derniers permett<strong>en</strong>t de déterminer<br />
l’alim<strong>en</strong>tation électrique appropriée.<br />
On aboutit ainsi à la définition d’un système comportant généralem<strong>en</strong>t :<br />
– une source d’énergie électrique ;<br />
– un convertisseur permettant d’adapter et/ou de moduler l’énergie absorbée ;<br />
– un moteur électrique qui convertit l’énergie électrique <strong>en</strong> énergie mécanique ;<br />
– la charge mécanique, comportant ou non un transmetteur mécanique (réducteur,<br />
convertisseur rotation-translation...), qui peut être <strong>en</strong>traînante ou <strong>en</strong>traînée.<br />
© Dunod – La photocopie non autorisée est un délit.<br />
La solution est rarem<strong>en</strong>t unique, le choix <strong>en</strong>tre les différ<strong>en</strong>tes possibilités devra t<strong>en</strong>ir<br />
compte d’argum<strong>en</strong>ts techniques mais aussi économiques. Il est indisp<strong>en</strong>sable d’affiner le<br />
cahier des charges afin d’avoir la connaissance la plus précise possible de la tache à réaliser<br />
et des contraintes associées (variation de vitesse, réversibilité).<br />
II<br />
Point de fonctionnem<strong>en</strong>t<br />
• Recherche d’un point de fonctionnem<strong>en</strong>t mécanique<br />
La loi d’évolution de la vitesse de rotation d’un groupe machine-charge est régie<br />
par le principe fondam<strong>en</strong>tal de la dynamique (PFD). Les couples sont algébriques.<br />
FICHE 1 – Chaîne motorisée<br />
5
J d = C u + C ′<br />
dt<br />
J : mom<strong>en</strong>t d’inertie de l’<strong>en</strong>semble machine-charge <strong>en</strong>traînée, <strong>en</strong> kg m 2 ,<br />
C u : couple utile disponible sur l’arbre <strong>en</strong> Nm,<br />
C ′ : couple de charge <strong>en</strong> Nm.<br />
Cette équation est différ<strong>en</strong>tielle. Elle traduit le fait que la vitesse de la machine ne<br />
peut pas varier instantaném<strong>en</strong>t <strong>en</strong> raison de l’inertie du système.<br />
Conv<strong>en</strong>tions de signes<br />
Machine<br />
C<br />
Ω<br />
Charge<br />
• Quelques exemples de charges<br />
Loi de couple C’ = k = cte C’ = kΩ C’ = kΩ 2 C’ = k/Ω<br />
Puissance P’= C’Ω P’ = kΩ P’ = kΩ 2 P’ = kΩ 3 P’ = k<br />
Exemples Levage, broyeur, Agitateurs, Pompes et v<strong>en</strong>tilateurs Enrouleurs,<br />
d’applications pompe à piston mixeurs. c<strong>en</strong>trifuges, certains dérouleurs,<br />
ou volumétrique ... compresseurs machines outils,<br />
broches...<br />
• Régime perman<strong>en</strong>t<br />
Le point de fonctionnem<strong>en</strong>t <strong>en</strong> régime perman<strong>en</strong>t est caractérisé par le fait :<br />
– que la vitesse est constante ;<br />
– que si elle varie à la suite d’un événem<strong>en</strong>t extérieur, elle revi<strong>en</strong>t à sa valeur initiale<br />
(stabilité).<br />
Algébriquem<strong>en</strong>t : C u = – C’<br />
Graphiquem<strong>en</strong>t : le point est à l’intersection des courbes C u (Ω) et –C’(Ω)<br />
La connaissance du couple C u et de la vitesse Ω permet <strong>en</strong>suite de trouver la valeur<br />
des différ<strong>en</strong>ts paramètres (t<strong>en</strong>sion, courant...) d’alim<strong>en</strong>tation de la machine.<br />
Exemple : TGV Sud-Est<br />
Ce TGV comporte 12 moteurs à courant continu série par rame, un par<br />
boggie-moteur. Pour une vitesse v de 240 km/h du TGV, la vitesse de rotation<br />
des moteurs est de 3000 tr/min. Elle est contrôlée par la t<strong>en</strong>sion U.<br />
Caractéristiques mécaniques :<br />
– de la machine pour U 1 = 600 V (C 1 ) et U 2 = 1 200 V (C 2 )<br />
– de la charge pour un palier (sol plat) et une rampe (côte).<br />
6 Électrotechnique <strong>en</strong> <strong>28</strong> <strong>fiches</strong>
1<br />
T<br />
em<br />
(Nm)<br />
U=600V<br />
U=1200V<br />
Rampe<br />
1500<br />
1030<br />
1000<br />
Palier<br />
500<br />
n(tr/min)<br />
30<br />
0<br />
0 1000 2000 3000 4000 5000 6000<br />
On règle la valeur moy<strong>en</strong>ne de la t<strong>en</strong>sion d’alim<strong>en</strong>tation du moteur à 600 V.<br />
Sur un sol plat le point de fonctionnem<strong>en</strong>t est à l’intersection de la caractéristique<br />
(C 1 ) et de celle correspondant à un palier : la vitesse de rotation s’établit<br />
à n 1 = 3400 tr/min, celle du TGV à v 1 = 272 km/h.<br />
S’il aborde une côte, le point de fonctionnem<strong>en</strong>t est à l’intersection de (C 2 ) et<br />
de celle correspondant à une rampe : la vitesse de rotation s’établit à n 2 = 2000<br />
tr/min, soit v 2 = 160 km/h.<br />
Pour maint<strong>en</strong>ir sa vitesse à la valeur v 1 il faut augm<strong>en</strong>ter U. Avec 1200 V on<br />
obti<strong>en</strong>t v 2 = 304 km/h, c’est trop, il faudra adopter un réglage intermédiaire.<br />
©Dunod – La photocopie non autorisée est un délit.<br />
• Stabilité d’un point de fonctionnem<strong>en</strong>t<br />
0<br />
C(Nm)<br />
(2)<br />
dΩ<br />
J dt<br />
C u<br />
Ω 2 Ω 1<br />
(1) –C'<br />
dΩ<br />
J dt<br />
–1<br />
Ω (rds )<br />
Supposons qu’à la suite d’un évènem<strong>en</strong>t<br />
extérieur la machine s’écarte de<br />
son point de fonctionnem<strong>en</strong>t :<br />
– si elle y revi<strong>en</strong>t à l’issue d’un régime<br />
transitoire, le point de fonctionnem<strong>en</strong>t<br />
est stable (1),<br />
– dans le cas contraire, il est instable<br />
(2).<br />
De manière générale, un point de fonctionnem<strong>en</strong>t correspondant à la vitesse Ω 0 sera<br />
stable si, <strong>en</strong> ce point, la p<strong>en</strong>te de la caractéristique de la charge <strong>en</strong>traînée est supérieure<br />
à celle de la machine (cas 1).<br />
Graphiquem<strong>en</strong>t cette règle se traduit par le fait que la caractéristique du moteur est audessus<br />
de –C’(Ω) pour des valeurs de vitesse inférieures à Ω 0 et au-dessous pour des<br />
valeurs supérieures à Ω 0 .<br />
FICHE 1 – Chaîne motorisée<br />
7