2009 - Thèse soutenue par Nicolas RAGOT - ESIGELEC
2009 - Thèse soutenue par Nicolas RAGOT - ESIGELEC
2009 - Thèse soutenue par Nicolas RAGOT - ESIGELEC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
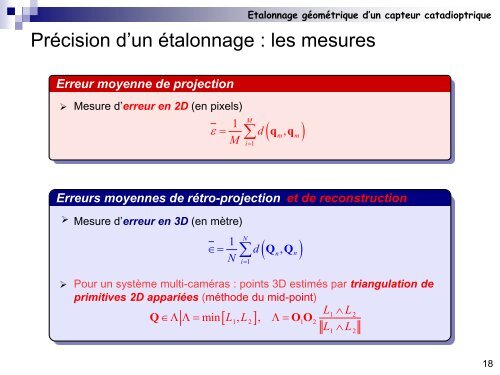
Etalonnage géométrique d’un capteur catadioptrique<br />
Précision d’un étalonnage : les mesures<br />
Erreur moyenne de projection<br />
‣ Mesure d’erreur en 2D (en pixels)<br />
1<br />
M d qm,<br />
qm<br />
M<br />
i1<br />
<br />
<br />
Erreurs moyennes de rétro-projection<br />
et de reconstruction<br />
‣ Mesure d’erreur en 3D (en mètre)<br />
N<br />
1<br />
d<br />
Q , Q<br />
N i 1<br />
‣ Pour un système multi-caméras : points 3D estimés <strong>par</strong> triangulation de<br />
primitives 2D ap<strong>par</strong>iées (méthode du mid-point)<br />
Q <br />
min<br />
1, 2<br />
, O O L L<br />
1 2<br />
L L<br />
<br />
n<br />
1 2<br />
L L <br />
n<br />
<br />
1 2<br />
18