IN - Chapitre 4 - Animation - IUT d'Arles
IN - Chapitre 4 - Animation - IUT d'Arles
IN - Chapitre 4 - Animation - IUT d'Arles
SHOW LESS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
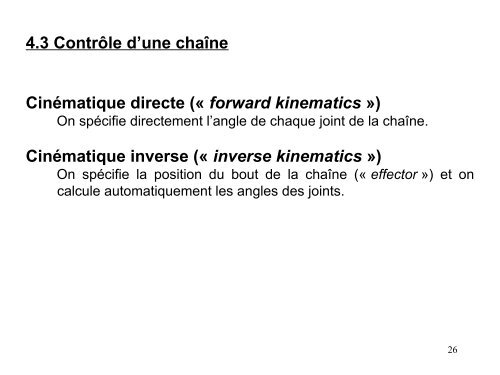
4.3 Contrôle d’une chaîne<br />
Cinématique directe (« forward kinematics »)<br />
On spécifie directement l’angle de chaque joint de la chaîne.<br />
Cinématique inverse (« inverse kinematics »)<br />
On spécifie la position du bout de la chaîne (« effector ») et on<br />
calcule automatiquement les angles des joints.<br />
26