

Méthodes numériques pour des systèmes hyperboliques avec terme ...
Méthodes numériques pour des systèmes hyperboliques avec terme ...
Méthodes numériques pour des systèmes hyperboliques avec terme ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.3. Méthode de projection GRP espace-temps transport 1D<br />
t = t n+1<br />
t<br />
v n+1 2<br />
i− 1 2<br />
( )<br />
t n+1 − x−x i−<br />
2<br />
1<br />
a<br />
u n i (x−a∆t)<br />
v n+1 2<br />
i− 1 2<br />
t = t n<br />
(t) u n i (x i+ 1 2<br />
−a(t−t n ))<br />
x i−<br />
1<br />
2<br />
x−x i− 1<br />
2<br />
t−t n = a<br />
x i+<br />
1<br />
2<br />
x<br />
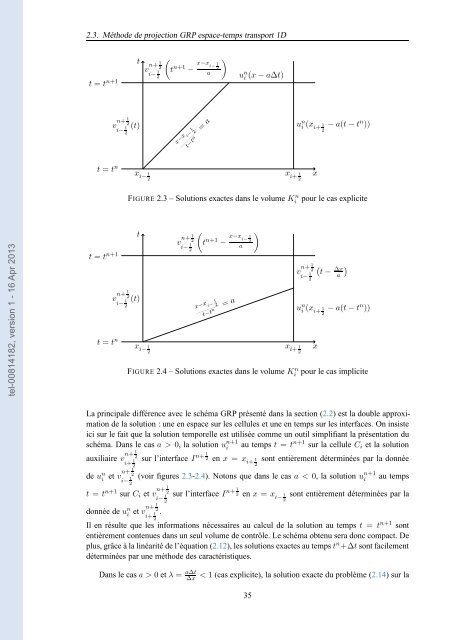
FIGURE 2.3 – Solutions exactes dans le volume K n i <strong>pour</strong> le cas explicite<br />
tel-00814182, version 1 - 16 Apr 2013<br />
t = t n+1<br />
t<br />
v n+1 2(t)<br />
i− 1 2<br />
t = t n<br />
x i−<br />
1<br />
2<br />
v n+1 2<br />
i− 1 2<br />
( )<br />
t n+1 − x−x i− 1 2<br />
a<br />
x−x i−<br />
1<br />
2<br />
t−t n = a<br />
x i+<br />
1<br />
2<br />
v n+1 2<br />
i− 1 2<br />
( )<br />
t−<br />
∆x<br />
a<br />
u n i (x i+ 1 2<br />
−a(t−t n ))<br />
FIGURE 2.4 – Solutions exactes dans le volume K n i <strong>pour</strong> le cas implicite<br />
x<br />
La principale différence <strong>avec</strong> le schéma GRP présenté dans la section (2.2) est la double approximation<br />
de la solution : une en espace sur les cellules et une en temps sur les interfaces. On insiste<br />
ici sur le fait que la solution temporelle est utilisée comme un outil simplifiant la présentation du<br />
schéma. Dans le cas a > 0, la solution u n+1<br />
i<br />
au temps t = t n+1 sur la cellule C i et la solution<br />
auxiliaire v n+1 2<br />
i+ 1 2<br />
de u n i et v n+1 2<br />
i− 1 2<br />
t = t n+1 sur C i et v n+1 2<br />
i− 1 2<br />
sur l’interface I n+1 2 en x = x i+<br />
1<br />
2<br />
sont entièrement déterminées par la donnée<br />
(voir figures 2.3-2.4). Notons que dans le cas a < 0, la solution u n+1<br />
i<br />
sur l’interface I n+1 2 en x = x i−<br />
1<br />
2<br />
au temps<br />
sont entièrement déterminées par la<br />
donnée de u n i et vn+1 2<br />
.<br />
i+ 1 2<br />
Il en résulte que les informations nécessaires au calcul de la solution au temps t = t n+1 sont<br />
entièrement contenues dans un seul volume de contrôle. Le schéma obtenu sera donc compact. De<br />
plus, grâce à la linéarité de l’équation (2.12), les solutions exactes au tempst n +∆t sont facilement<br />
déterminées par une méthode <strong>des</strong> caractéristiques.<br />
Dans le casa > 0 et λ = a∆t<br />
∆x<br />
< 1 (cas explicite), la solution exacte du problème (2.14) sur la<br />
35













