

Méthodes numériques pour des systèmes hyperboliques avec terme ...
Méthodes numériques pour des systèmes hyperboliques avec terme ...
Méthodes numériques pour des systèmes hyperboliques avec terme ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
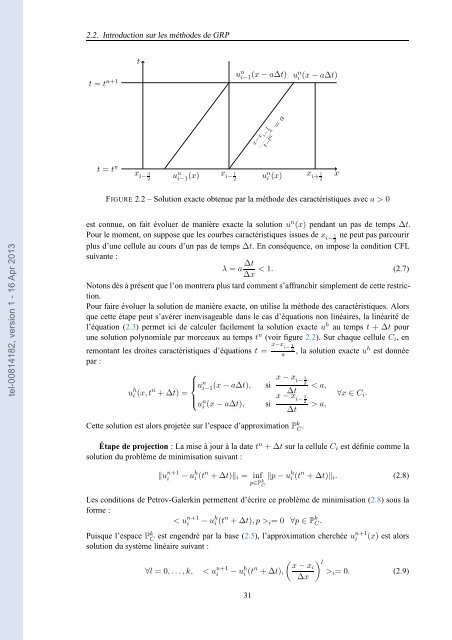
2.2. Introduction sur les métho<strong>des</strong> de GRP<br />
t<br />
u n i−1 (x−a∆t) un i (x−a∆t)<br />
u n i−1 (x)<br />
x i−<br />
1<br />
2<br />
un i (x)<br />
x i+<br />
1<br />
2<br />
x<br />
t = t n+1<br />
t = t n<br />
x i−<br />
3<br />
2<br />
x−x i− 1<br />
2<br />
t−t n = a<br />
FIGURE 2.2 – Solution exacte obtenue par la méthode <strong>des</strong> caractéristiques <strong>avec</strong> a > 0<br />
tel-00814182, version 1 - 16 Apr 2013<br />
est connue, on fait évoluer de manière exacte la solution u n (x) pendant un pas de temps ∆t.<br />
Pour le moment, on suppose que les courbes caractéristiques issues de x i−<br />
1 ne peut pas parcourir<br />
2<br />
plus d’une cellule au cours d’un pas de temps ∆t. En conséquence, on impose la condition CFL<br />
suivante :<br />
λ = a ∆t < 1. (2.7)<br />
∆x<br />
Notons dès à présent que l’on montrera plus tard comment s’affranchir simplement de cette restriction.<br />
Pour faire évoluer la solution de manière exacte, on utilise la méthode <strong>des</strong> caractéristiques. Alors<br />
que cette étape peut s’avérer inenvisageable dans le cas d’équations non linéaires, la linéarité de<br />
l’équation (2.3) permet ici de calculer facilement la solution exacte u h au temps t + ∆t <strong>pour</strong><br />
une solution polynomiale par morceaux au temps t n (voir figure 2.2). Sur chaque cellule C i , en<br />
remontant les droites caractéristiques d’équations t = x−x i− 1 2<br />
a<br />
, la solution exacte u h est donnée<br />
par :<br />
⎧<br />
⎪⎨ u n<br />
u h i(x,t n i−1<br />
+∆t) =<br />
(x−a∆t), si x−x i−<br />
1<br />
2<br />
< a,<br />
∆t<br />
⎪⎩ u n i (x−a∆t), si x−x i−<br />
1<br />
2<br />
> a,<br />
∆t<br />
∀x ∈ C i .<br />
Cette solution est alors projetée sur l’espace d’approximation P k C .<br />
Étape de projection : La mise à jour à la date t n +∆t sur la cellule C i est définie comme la<br />
solution du problème de minimisation suivant :<br />
‖u n+1<br />
i<br />
−u h i(t n +∆t)‖ i = inf ‖p−u h i(t n +∆t)‖ i . (2.8)<br />
p∈P k C<br />
Les conditions de Petrov-Galerkin permettent d’écrire ce problème de minimisation (2.8) sous la<br />
forme :<br />
< u n+1<br />
i<br />
−u h i(t n +∆t),p > i = 0 ∀p ∈ P k C.<br />
Puisque l’espace P k C<br />
est engendré par la base (2.5), l’approximation cherchée un+1<br />
i<br />
(x) est alors<br />
solution du système linéaire suivant :<br />
∀l = 0,...,k, < u n+1<br />
i<br />
−u h i (tn +∆t),<br />
31<br />
( ) l x−xi<br />
> i = 0. (2.9)<br />
∆x













