POSIMATIC - ASCO Numatics
POSIMATIC - ASCO Numatics
POSIMATIC - ASCO Numatics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Electropneumatic positioner<br />
series 606<br />
Positionneur électropneumatique<br />
série 606<br />
<strong>POSIMATIC</strong><br />
Installation manual<br />
Manuel d'installation<br />
IM165-2-X.R0<br />
(383 45 96)<br />
GB<br />
F
<strong>POSIMATIC</strong> INSTALLATION<br />
2<br />
Contents<br />
1. Safety instructions ......................................................................................................................................... 3<br />
1.1 General .................................................................................................................................................. 3<br />
1.2 Description of symbols .......................................................................................................................... 3<br />
1.3 Electrical and pneumatic safety instructions .......................................................................................... 4<br />
1.4 Proper use ............................................................................................................................................. 4<br />
1.5 Tools required for installation and connection ......................................................................................... 4<br />
2. Manufacturer’s specifications ......................................................................................................................... 4<br />
2.1 Scope of delivery ................................................................................................................................... 4<br />
3. Mechanical assembly .................................................................................................................................... 5<br />
3.1 Assembly to linear actuators ................................................................................................................. 5<br />
3.2 Assembly to a rotary actuator ................................................................................................................ 5<br />
3.3 External assembly ................................................................................................................................. 5<br />
4. Pneumatic connections .................................................................................................................................. 6<br />
5. Electrical connections .................................................................................................................................... 7<br />
6. Operation ...................................................................................................................................................... 7<br />
6.1 Controls and indicators .................................................................................................................................. 7<br />
6.2 Access levels ........................................................................................................................................ 8<br />
7. Startup ...................................................................................................................................................... 8<br />
7.1 General operating instructions................................................................................................................ 8<br />
7.2 Initialisation ........................................................................................................................................... 8<br />
7.2.1Settings ......................................................................................................................................... 8<br />
7.2.2Factory settings (positioner assembled to valve) .......................................................................... 10<br />
8. Operating modes ...........................................................................................................................................10<br />
8.1 Automatic mode (A: AUTO) ...................................................................................................................10<br />
8.2 Manual mode (B: MANUAL) ..................................................................................................................10<br />
8.3 Configuration (C: CONFIG) .................................................................................................................... 10<br />
9. Integration of options ....................................................................................................................................11<br />
9.1 Plug-in module for analog position feedback ......................................................................................... 11<br />
10. List of parameters ......................................................................................................................................... 12<br />
10.1 Description of parameters .....................................................................................................................13<br />
11. Error messages ............................................................................................................................................ 18<br />
12. Technical characteristics ...............................................................................................................................19<br />
13. Assembly options ......................................................................................................................................... 20<br />
14. Dimensions ...................................................................................................................................................21<br />
Index .....................................................................................................................................................................22<br />
NOTICE<br />
The information in this manual is subject to change without notice.<br />
In no event shall <strong>ASCO</strong>/JOUCOMATIC be liable for technical or editorial errors or omissions. Neither is any<br />
liability assumed for accidental or consequential damages arising out of or in connection with the supply or<br />
use of the information contained herein.<br />
THIS MANUAL CONTAINS INFORMATION PROTECTED BY COPYRIGHT. NO PART OF THIS DOCUMENT<br />
MAY BE PHOTOCOPIED OR REPRODUCED IN ANY FORM OR MANNER WHATSOEVER WITHOUT<br />
PRIOR WRITTEN PERMISSION FROM <strong>ASCO</strong>/JOUCOMATIC.<br />
COPYRIGHT © 2000/2001 - <strong>ASCO</strong>/JOUCOMATIC - All rights reserved.
INSTALLATION <strong>POSIMATIC</strong><br />
1. Safety instructions<br />
Please read and observe the following safety precautions:<br />
1.1 General<br />
To ensure proper functioning of the positioner please provide for the following:<br />
- Ensure proper transport and storage.<br />
- Installation and start-up must be carried out by trained and qualified personnel only.<br />
- The positioner must be operated in accordance with the instructions contained in this installation manual.<br />
- Ensure proper maintenance and care.<br />
Please follow:<br />
- the instructions contained in this installation manual;<br />
- all safety regulations related to the installation and operation of electrical equipment.<br />
- This product must not be operated in potentially explosive atmospheres.<br />
The regulations, standards and directives mentioned in this installation manual are applicable for the member states of the<br />
European Union only. If the <strong>POSIMATIC</strong> positioner is used outside the European Union, please adhere to local rules and<br />
regulations.<br />
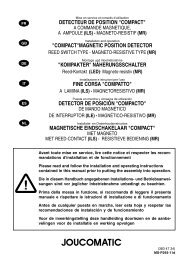
1.2 Description of symbols<br />
Throughout this manual, the following symbols refer to important information:<br />
!<br />
Warning<br />
!<br />
i<br />
Warning. Non-observance of the instructions contained in this manual may result in danger to life<br />
and health and/or substantial damage to property.<br />
Caution. Non-observance of the safety precautions marked by this symbol may cause slight personal<br />
injury and/or damage to property.<br />
Note. This symbol refers to important information on the <strong>POSIMATIC</strong> positioner.<br />
This product complies with the essential requirements of the EMC-Directive 89/336/EEC and amendments. Certified CE. A<br />
separate Declaration of Conformity is available on request.<br />
A separate Declaration of Incorporation relating to EEC-Directive 89/392/EEC Annex II B is available on<br />
request. Please provide acknowledgement number and serial numbers of products concerned.<br />
3
<strong>POSIMATIC</strong> INSTALLATION<br />
!<br />
Warning<br />
1.4 Proper use<br />
4<br />
1.3 Electrical and pneumatic safety instructions<br />
The assembly, electrical and pneumatic connection as well as startup of the <strong>ASCO</strong>/JOUCOMATIC<br />
positioner must be carried out by trained, qualified personnel only.<br />
The electrical safety of all power supplying equipment must be ensured.<br />
Please provide for the following equipment:<br />
- 24 VDC power supply unit.<br />
- 1 analog output of 0/4-20mA for current setpoint (terminal Iw+, Iw-),<br />
- or 1 analog output of 0-10V (terminal Uw+, Uw-).<br />
All electrical specifications must be observed.<br />
All safety measures for the installation and startup of pneumatic actuators must be adhered to.<br />
The high forces generated by the positioning actuators may cause injury.<br />
The <strong>POSIMATIC</strong> is a smart electropneumatic positioner to be mounted to pneumatically operated linear or rotary actuators.<br />
The positioner can be mounted directly on the actuator with a corresponding assembly kit containing the mounting bracket<br />
or adapter, the position sensor and the appropriate fastening screws.<br />
The positioner can also be assembled externally. No mounting bracket or adapter is required for this purpose.<br />
1.5 Tools required for assembly and connection<br />
- Open-end wrench – dimensions across flats: 8, 10, 27<br />
- Allen keys: 3 mm and 4 mm<br />
- Screw driver: 3.5 mm<br />
2. Manufacturer’s specifications<br />
2.1 Scope of delivery<br />
Please check the delivery immediately on receipt for completeness and intactness. The scope of delivery is detailed in the<br />
shipping documents.<br />
Check the products delivered and the ordering codes to see whether the construction and quantity comply with your order.<br />
If you have ordered a complete unit consisting of positioner and valve, these devices and the pertinent accessories are<br />
fully preassembled and factory-set at delivery. <strong>ASCO</strong>/JOUCOMATIC’s positioner is ready for immediate use.
INSTALLATION <strong>POSIMATIC</strong><br />
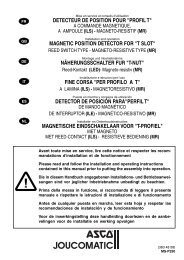
3. Mechanical assembly<br />
3.1 Assembly to linear actuators<br />
- The actuator must be in its initial position (actuator exhausted).<br />
- Insert the mounting bracket (1) between the actuator’s head (2) and the<br />
position sensor (3) and fasten it by tightening the position sensor at the<br />
hexagon (4).<br />
- Screw the positioner to the mounting bracket (1) with two M6 screws (5).<br />
- Unscrew and open the bonnet of the positioner.<br />
- Introduce the cable of the linear position sensor into the M12 gland (6) of<br />
the positioner and connect it to the terminal board according to the<br />
assignment plan (see chapter 5).<br />
- Then screw the M12 gland tight. The cable must fit tightly.<br />
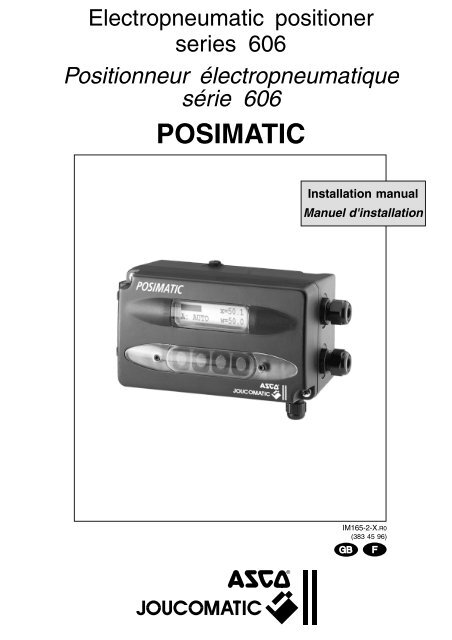
3.2 Assembly to rotary actuators<br />
- The actuator must be in its initial position.<br />
- Screw the rotary position sensor (3) with the mounting bracket (1)<br />
to the actuator.<br />
Positioning of the rotary potentiometer on a rotary<br />
actuator (top view)<br />
Adapter marking<br />
Pneumatic connection<br />
Potentiometer spindle<br />
marking<br />
i<br />
Actuator<br />
Gate open<br />
Rotary potentiometer<br />
Gate closed<br />
3.3. External assembly<br />
Drive shaft (top view)<br />
Rotary potentiometer spindle<br />
Adapter<br />
Rotary potentiometer<br />
connection<br />
Gate disk closed<br />
- Mount the positioner with the NAMUR adapter (4)<br />
directly to the rotary actuator (2).<br />
- Unscrew and open the bonnet of the positioner.<br />
- Introduce the cable of the linear position sensor into<br />
the M12 gland (6) of the positioner and connect it to<br />
the terminal board according to the assignment plan<br />
(see chapter 5).<br />
- Then screw the M12 gland tight. The cable must be<br />
fit tightly.<br />
- Observe the correct mounting position of the rotating position sensor to the “pivot with cheeks”.<br />
- The actuator must be in its initial position (actuator exhausted).<br />
- Mount the position sensor as described in chapter 3.1 and/or 3.2.<br />
3<br />
1<br />
6<br />
5<br />
1<br />
Fig. 1: Assembly to linear actuator<br />
2<br />
Fig. 2: Assembly to rotary actuator<br />
4<br />
3<br />
4 2<br />
6<br />
5
<strong>POSIMATIC</strong> INSTALLATION<br />
4. Pneumatic connections<br />
- Establish the connection between the pneumatic outlet A1 (single acting) or outlets A1 and A2 (double acting) of the<br />
positioner and the pneumatic pilot pressure inlet of the actuator.<br />
- Connect the pressure supply to port P (max. 6 bar or 90 psi).<br />
6<br />
!<br />
Caution: Observe the max. pilot pressure of the actuators !<br />
Rear view Side view (from left)<br />
Fig. 2: Pneumatic connections<br />
Legend:<br />
A1: pneumatic outlet A1 (single and double acting actuators)<br />
A2: pneumatic outlet A2 (double acting actuators)<br />
P: Pressure supply<br />
R: Exhaust<br />
Actuator functions:<br />
„Control function 1“: single acting device with spring in retracted position<br />
„Control function 2“: single acting device with spring in extended position<br />
„Control function 3“: double acting device
INSTALLATION <strong>POSIMATIC</strong><br />
5. Electrical connections<br />
!<br />
- Shut the bonnet and screw it tight.<br />
!<br />
6. Operation<br />
6.1 Controls and indicators<br />
- Connect the position sensor.<br />
- Connect the setpoint signal 0/4-20 mA or 0-10 V to the corresponding terminals.<br />
- Connect the 24 VDC power supply cable.<br />
Fig. 3: Terminal assignment<br />
Make sure not to damage the seal and cable.<br />
⇐ ⇒ + -<br />
Fig. 4: Controls and indicators<br />
or orange<br />
gn green<br />
bl blue<br />
gr grey<br />
2 3 4 5<br />
yellow green red black<br />
1<br />
Legend<br />
10 V ⎫ gn Connection of<br />
X ⎬ br external displacement<br />
⎭ measuring system<br />
Iw+<br />
Iw-<br />
⎫<br />
⎬<br />
⎭<br />
Setpoint input<br />
0/4-20 mA<br />
Uw+<br />
Uw-<br />
⎫<br />
⎬<br />
⎭<br />
Setpoint input<br />
0-10 V<br />
X+<br />
X-<br />
⎫<br />
⎬<br />
⎭<br />
Feedback value output 0-10V<br />
4-20 mA (optional)<br />
⎫ GND ⎬<br />
24 V ⎭<br />
Supply voltage<br />
24 V DC<br />
Protection earth<br />
A1 Alarm1<br />
A2 Alarm2<br />
ERR Error output<br />
⊥ GND out<br />
External earth terminal:<br />
Grounding for personal protection<br />
1 Two-line display of 16 characters each<br />
2 Return key (yellow)<br />
3 Jump key (green)<br />
4 Up key (red)<br />
5 Down key (black)<br />
7
<strong>POSIMATIC</strong> INSTALLATION<br />
6.2 Access levels<br />
The following two access levels are provided for operation of the positioner:<br />
Control level (A: AUTO, B: MANUAL)<br />
This level is automatically set each time the positioner is switched on. You can toggle between the AUTO and MANUAL<br />
operating modes at this level.<br />
In the MANUAL mode, the valve can be operated with the + key and - key. The specified value is activated only when the<br />
→ key is pressed. This allows you to test the reactions to jumps.<br />
In the AUTO operating mode, the valve is controlled by a setpoint signal.<br />
Configuration level (C: CONFIG)<br />
Different parameters can be set at this level (see list of parameters on page 12).<br />
This allows for optimal adaptation to your specific application.<br />
7. Startup<br />
- Activate the pneumatic pressure supply (observe max. pilot pressure !).<br />
- Switch on the 24 VDC power supply [terminal 24V (+) and ⊥ (-)].<br />
- Specify the analog setpoint 0/4-20 mA or 0-10 V.<br />
7.1 General operating instructions<br />
8<br />
i<br />
i<br />
i<br />
The two screws on the keyboard cover must be loosened to change the settings and parameters of<br />
the positioner. Pull the cover slightly to remove it.<br />
The different operating levels and parameters can be accessed with the ← key and → key. The parameters can be changed<br />
with the + key and the – key. Pressing the ← or → key automatically stores the new values.<br />
Fast return: Press ← ← and → to return to A: AUTO.<br />
Memory function: Enter the menu item C:CONFIG to return to the previously selected menu.<br />
7.2 Initialisation (C: CONFIG, D: NO INIT)<br />
7.2.1 Settings<br />
After the assembly and electrical and pneumatic connection has been completed, the positioner must be initialised. Without<br />
initialisation, the positioner is in the operating mode „D: NO INIT“. This operating mode can also be obtained by selecting<br />
„DEFAULT“ in the menu „3:DEFAULT STATE“.<br />
In the operating mode „D: NO INIT“, you can OPEN and CLOSE the valve manually by pressing<br />
the + and – keys.<br />
Press + and – to OPEN the actuator at high speed.<br />
Press – and + to CLOSE the actuator at high speed.
INSTALLATION <strong>POSIMATIC</strong><br />
- Press ← once to call „C: CONFIG“.<br />
- Press → for approx. 3 secs. until the upper readout disappears. „1: SETPOINT“ is displayed. Use the + and – keys to<br />
select the setpoint input in the upper readout (0-20 mA, 4-20 mA or 0-10 V).<br />
- Press → to call „2: INIT ALL“:<br />
„NO INIT“ is displayed in the upper readout.<br />
- Press + or – and then → for 3 seconds.<br />
The automatic initialisation steps run1 ... run5 are started.<br />
This process can take up a few minutes.<br />
- During run3, the actual positioning time for OPEN (up) and CLOSE (down) is displayed for 5 seconds. The positioning<br />
time can be changed by pressing → during these 5 seconds.<br />
- „ADJUST NOZZLE(S) THEN PRESS 1 s)<br />
- Check the setting by pressing the ← key. The newly set positioning time is displayed. If no key is pressed in the following<br />
5 seconds, the initialisation routine is automatically continued.<br />
After the initialisation has been successfully completed, „INIT OK“ is displayed in the upper readout.<br />
- Press the ← key three times until „A: AUTO“ is displayed.<br />
The positioner is ready for use. (Note: An external setpoint signal is required.)<br />
i<br />
After switch-on<br />
If you operate an actuator in „control function 2“ (spring in extended position) we recommend<br />
integrating an external flow restrictor into the air inlet (port P).<br />
Adjustment: - Open internal flow restrictor D.<br />
- Adjust external flow restrictor so that a positioning speed > 1 sec is reached.<br />
- Adjust the OPEN/CLOSE positioning times with the internal flow restrictor<br />
(if necessary).<br />
- Set parameter 24: SETP DIRECTN to INVERS.<br />
9
<strong>POSIMATIC</strong> INSTALLATION<br />
7.2.2 Factory settings (positioner assembled to valve)<br />
„A: AUTO“ is displayed. The positioner is ready for use.<br />
If you wish to drive the valve by hand, press the → key once.<br />
„B: MANUAL“ is displayed.<br />
The value can be adjusted with the + and – keys and the valve can be driven into the desired position with the → key.<br />
The positioner must be newly initialised after each replacement of valve or diaphragm. For this purpose call the menu<br />
„2: INIT ALL“ and proceed as described under 7.2.1.<br />
For „control function 2“ set the parameter 24:SETP DIRECTN to INVERS.<br />
8. Operating modes<br />
8.1 Automatic mode (A: AUTO)<br />
The automatic mode is the standard operating mode. The initialised positioner reacts automatically to setpoint changes<br />
and sets the valve into motion accordingly .<br />
The + and – keys do not have any function in this operating mode.<br />
The actual position (x) is displayed in percent together with a bar graph in the upper readout.<br />
In the lower readout, the current operating mode is displayed on the left and the current setpoint (w) is displayed in percent<br />
on the right.<br />
8.2 Manual mode (B: MANUAL)<br />
Press the → key to access menu item „B: MANUAL“.<br />
The valve can be driven by hand in the manual operation mode. The value can be adjusted with the + and – keys and the<br />
valve is driven into the desired position with the → key.<br />
8.3 Configuration (C: CONFIG)<br />
Press the → key to access the configuration settings (C: CONFIG).<br />
10
INSTALLATION <strong>POSIMATIC</strong><br />
The parameters of the positioner can be changed in the configuration menu. The parameter value is displayed in the upper<br />
readout; the parameter number and parameter name are displayed in the lower readout. Settings are made as shown<br />
above. See chapter 10.1 for a description of the parameters.<br />
9. Integration of options<br />
All options ordered together with the positioner are preassembled at delivered and ready for use.<br />
If you wish to add options at a later date, please consult us.<br />
11
<strong>POSIMATIC</strong> INSTALLATION<br />
10. List of parameters<br />
12<br />
Electropneumatic positioner: List of parameters<br />
Display Function Parameter values Unit Factory settings<br />
1: SETPOINT Current range of setpoint 0..10 V V 4..20 mA<br />
0..20 mA<br />
4..20 mA<br />
mA<br />
2: INIT ALL Initialisation of actuator NO INIT - NO INIT<br />
and positioner INIT OK<br />
3: DEFAULT STATE Recovery NO DEFAULT - DEFAULT<br />
of factory settings DEFAULT<br />
11: X-DIRECTION Direction of X display RISE RISE<br />
and of feedback value output FALL<br />
12: ALARM FUNCTN Alarm function OFF OFF<br />
Binary outputs min/max<br />
(Alarm1, Alarm2) min/min<br />
max/max<br />
13: LEVEL ALARM1 Response threshold Alarm1 0.0...10 % 10.0<br />
14: LEVEL ALARM2 Response threshold Alarm2 0.0...100 % 90.0<br />
15: ERROR FUNCTN Triggering of ERROR ERROR + RANGE<br />
error output ERROR + INACTIVE<br />
RANGE<br />
ERROR + RANGE<br />
ERR+RANGE+INAC<br />
16: ERROR TIME Monitoring of valve positioning time auto s auto<br />
(Error output) 0...100<br />
17: ERROR LEVEL Max. deviation auto % auto<br />
(Error output) 0.0...100<br />
18: RANGE FUNCTN Monitoring of < 4mA mA 20 mA<br />
setpoint input/ > 20mA<br />
error output range < 4mA or > 20mA<br />
21: MIN POSITION Standardisation of position<br />
Minimum position<br />
0.0...100 % 0.0<br />
22: MAX POSITION Standardisation of position<br />
Maximum position<br />
0.0...100 % 100<br />
23: CLOSE TIGHT Close tight function no no<br />
at minimum/maximum position min<br />
max<br />
min & max<br />
24: SETP DIRECTN Direction of action of NORMAL NORMAL<br />
setpoint INVERSE<br />
25: SETP RAMP Ramp function of auto s 0<br />
setpoint 0...400<br />
26: SPLIT START Setpoint for start<br />
of split range<br />
0.0...100 % 0.0<br />
27: SPLIT END Setpoint for end<br />
of split range<br />
0.0...100 % 100<br />
28: SETP FUNCTN Linearisation function linear linear<br />
for setpoint 1 : 25<br />
Position � Flow 1 : 50<br />
free (1:25 inverse)<br />
30: FREE 0 % Definition of 0...100 % 0.0<br />
31: FREE 10 % freely programmable 28.5<br />
32: FREE 20 % characteristic curve (free) 50.0<br />
33: FREE 30 % 11 points 62.6<br />
34: FREE 40 % 71.5<br />
35: FREE 50 % 78.5<br />
36: FREE 60 % 84.1<br />
37: FREE 70 % 88.9<br />
38: FREE 80 % 93.1<br />
39: FREE 90 % 96.7<br />
40: FREE 100 % 100
INSTALLATION <strong>POSIMATIC</strong><br />
Electropneumatic positioner: List of parameters<br />
Display Function Parameter values Unit Factory settings<br />
41: X-DISPLAY Display of position POSITION % POSITION<br />
or flow FLOW<br />
42: DEADBAND Size of dead zone auto<br />
0.0...10.0<br />
auto<br />
43: PROP GAIN Proportional gain 10...1000 100<br />
(PD positioner) (K = 0,1...10)<br />
p<br />
44: DERIV TIME Differential time constant 10...1000 100<br />
(PD positioner) T = 0,01 s ...1 s)<br />
v<br />
45: FIELDBUS Fieldbus control SETP.ANALOG<br />
SETP. BUS<br />
SETP. ANALOG<br />
46: RELEASE Software version V XX<br />
(XX = two-digit figure)<br />
10.1 Description of parameters<br />
1: SETPOINT<br />
Range of analog setpoint input (Voltage:0-10 V or current: 0-20 mA, 4-20 mA).<br />
2: INIT ALL<br />
Initialisation<br />
Automatic initialisation is started by pressing the + or - and → keys (> 3sec). The individual steps of initialisation are<br />
displayed with „run 1“ to „run 5“.<br />
The positioner’s control parameters to drive the valve are optimised during initialisation.<br />
3: DEFAULT STATE<br />
Standard setting or recovery of factory settings and resetting of initialisation.<br />
The positioner is set to „Default“ by pressing the + or - and → keys (> 3 sec).<br />
i<br />
The positioner must be initialised again after having been set to „Default“ .<br />
All previous actuator parameters are deleted (initial state).<br />
11: X-DIRECTION<br />
Direction of manipulated variable.<br />
Setting of the direction of action (rising or falling) of the display and position feedback.<br />
AIR SUPPLY X-DIRECTION Assigned<br />
Chamber A1 feedback position x<br />
Air exhaust RISE 0 %<br />
Air on 100 %<br />
Air exhaust FALL 100 %<br />
Air on 0 %<br />
12: ALARM FUNCTN<br />
Activates or deactivates the alarm function.<br />
The response threshold of the alarms (limit contacts) depends on the scale of POSITION (mechanical travel).<br />
x = actual feedback value<br />
13
<strong>POSIMATIC</strong> INSTALLATION<br />
min/max:<br />
Position State of digital output A1 State of digital output A2<br />
x < Level Alarm1 < Level Alarm2 24V 0V<br />
Level Alarm1 < x < Level Alarm2 0V 0V<br />
Level Alarm1 < Level Alarm2 < x 0V 24V<br />
min/min:<br />
Position State of digital output A1 State of digital output A2<br />
x < Level Alarm1 < Level Alarm2 24V 24V<br />
Level Alarm1 < x < Level Alarm2 0V 24V<br />
Level Alarm1 < Level Alarm2 < x 0V 0V<br />
max/max:<br />
Position State of digital output A1 State of digital output A2<br />
x < Level Alarm1 < Level Alarm2 0V 0V<br />
Level Alarm1 < x < Level Alarm2 24V 0V<br />
Level Alarm1 < Level Alarm2 < x 24V 24V<br />
13: LEVEL ALARM 1<br />
Response threshold for Alarm 1,<br />
The digital output A1 (24VDC output) is switched as soon as the response threshold is reached.<br />
14: LEVEL ALARM 2<br />
Response threshold for Alarm 2.<br />
The digital output A2 (24VDC output) is switched as soon as the response threshold is reached.<br />
15: ERROR FUNCTN<br />
Function of error output (24VDC output) ERR<br />
ERROR: 16: ERROR TIME and 17: ERROR LEVEL exceeded.<br />
ERROR + INACTIVE: Error monitoring or manual mode.<br />
RANGE: Monitoring of the 4-20 mA setpoint input signal; selection over 18: RANGE FUNCTN<br />
ERROR + RANGE: Monitoring of error and range.<br />
ERR+RANGE+INAC: Activation of all error monitoring functions.<br />
16: ERROR TIME<br />
Monitoring time to set the error messages.<br />
This value (in seconds) is set to define the period of time within which the positioner must be in a steady state. The<br />
corresponding response threshold is preset with parameter 17.<br />
The error output ERR is set as soon as the position is out of the response threshold (error level) for a period longer than the<br />
monitoring time (error time).<br />
When set to „Auto“, this period is 10× the initialisation response time. This is automatically calculated during initialisation.<br />
17: ERROR LEVEL<br />
Response threshold for setting the error output ERR.<br />
Specification in percent of the admissible variable of deviation to trigger an error message.<br />
When set to „Auto“, the response threshold is equal to the slow speed range.<br />
The slow speed range is automatically calculated during initialisation.<br />
18: RANGE FUNCTN<br />
Monitoring of the setpoint signal range<br />
Specification whether a RANGE signal is to be triggered if 4 mA is not reached (monitoring of rupture of cable) or 20 mA<br />
is exceeded (monitoring of short circuit).<br />
21: MIN POSITION<br />
Start of manipulated variable limiting (YA)<br />
This function corresponds to a mechanical limitation of the closing movement.<br />
See Fig. 6: Limitation of lifting-/closing movement.<br />
The minimum distance between MIN POSITION and MAX POSITION is 10 %.<br />
14
INSTALLATION <strong>POSIMATIC</strong><br />
22: MAX POSITION<br />
End of manipulated variable limiting (YE)<br />
This function corresponds to a mechanical limitation of the lifting movement.<br />
i<br />
Parameters 21 and 22 limit the mechanical travel (from stop to stop) to the preset values. The<br />
mechanical range of the actuator on the effective flow can thus be limited.<br />
Physical stroke x (%)<br />
Position<br />
Fig. 6: Limitation of lifting and closing movement<br />
23: CLOSE TIGHT<br />
Tight closing of manipulated variable<br />
This function enables driving the valve at maximum actuator speed into its seat. The tight closing function can be activated<br />
for one or both stop positions. CLOSE TIGHT is effective as soon as the setpoint is 0.5% above MIN POSITION or 0.5%<br />
below MAX POSITION.<br />
Since the setpoint range is set between 0% and 100% by 21 and 22, the threshold of activation of the tight closing<br />
function in relation to the flow can be additionally adjusted downward with 21 and upward with 22.<br />
Stroke x (%)<br />
Fig. 7: Tightly closing function<br />
24: SETP DIRECTN<br />
Setpoint direction<br />
Setting the setpoint direction specifies direction of action of the setpoint. It is mainly required for the split range mode and<br />
for single acting actuators with „OPEN“ safety position („control function 2“).<br />
Physical stroke x (%)<br />
Unlimited stroke<br />
Limited stroke<br />
Fig. 8: Setpoint direction<br />
Limited stroke x (%)<br />
Flow<br />
Setpoint w (%)<br />
Setpoint w (%)<br />
Setpoint w (%)<br />
15
<strong>POSIMATIC</strong> INSTALLATION<br />
25: SETP RAMP<br />
Setpoint ramp<br />
The setpoint ramp is activated in the manual and automatic mode. It limits the speed of the actuator in the event of a quick<br />
rate-of-change of the setpoint.<br />
In the setting SETP RAMP = auto the slower of the two positioning times calculated during initialisation is used for the<br />
setpoint ramp.<br />
26: SPLIT START<br />
Setpoint for start of split range (Fig. 9: Split range operation)<br />
27: SPLIT END<br />
Setpoint for end of split range<br />
Parameters 26 and 27 together with parameter 24 limit the effective setpoint range. This is a solution for split range<br />
applications with<br />
❑ rising / falling<br />
❑ falling / rising<br />
❑ falling / falling<br />
❑ rising / rising<br />
characteristic curves.<br />
16<br />
Stroke x (%)<br />
Fig. 9: Split range operation (example)<br />
28: SETP FUNCTN<br />
Setpoint function (Fig. 10: Characteristic valve curves)<br />
This function enables the linearisation of non-linear characteristic curves of valves and the mapping of arbitrary flow<br />
characteristics of linear characteristic curves of valves.<br />
The device is provided with four characteristic curves:<br />
❑ linear<br />
❑ equal percentage 1 : 25<br />
❑ equal percentage 1 : 50<br />
❑ free (factory setting: 1 : 25 inverse)<br />
Setpoint range<br />
Setpoint range<br />
Positioner 1:<br />
Positioner 2:<br />
rising<br />
rising<br />
steigend steigend<br />
A curve with 11 points can be entered at 30: when “free” is selected.<br />
30: FREE 0%<br />
.<br />
.<br />
.<br />
40: FREE 100%<br />
Setpoint w (%)
INSTALLATION <strong>POSIMATIC</strong><br />
A flow value can be assigned to every setpoint at distance intervals of 10%. These points create a polygon with 10 straight<br />
lines resulting in an image of the characteristic curve of the valve.<br />
i<br />
The setpoints can only be entered at 28. SETP FUNCTN = free.<br />
Fig. 10: Characteristic valve curves<br />
41: X-DISPLAY<br />
Standardisation of manipulated variable<br />
Limiting the manipulated variable via 21: MIN POSITION (YA) and 22: MAX POSITION (YE) creates two different scales<br />
for display and position feedback (POSITION or FLOW).<br />
POSITION is the mechanical position (0 to 100%) between the hard stops of initialisation and is not influenced by YA or YE.<br />
FLOW is the standardisation of the display (0 to 100%) to the range between YA and YE and to the characteristic curve of<br />
the valve selected with 28: SETP FUNCTN. The setpoint (0 to 100%) is then related to this FLOW range (0 to 100%).<br />
X-DISPLAY can be changed to refer the display and the position feedback (x) to the flow (also if characteristic curves of<br />
valves are used).<br />
In this case, YE, YA and the characteristic curve of the valve is taken into account.<br />
42: DEADBAND<br />
Dead zone of the positioner<br />
The dead zone specifies the maximum allowable deviation between the feedback value and the setpoint.<br />
If DEADBAND = auto, the dead zone is adjusted to the requirements of the control loop during initialisation. The fixed<br />
preset value for the dead zone is used for all other discrete settings.<br />
!<br />
Stroke x (%)<br />
FREE (factory setting)<br />
1:25 inverse<br />
Setpoint w (%)<br />
Jumpy or nervous movements of the valve may occur if the setting for DEADBAND is too small.<br />
17
<strong>POSIMATIC</strong> INSTALLATION<br />
43: PROP GAIN<br />
Proportional gain<br />
Setting of proportional gain Kp<br />
PROP GAIN = 10 % ... 1000 % corresponds to Kp = 0.1...10<br />
Factory setting: PROP GAIN = 100 % corresponds to Kp = 1<br />
44: DERIV TIME<br />
Pre-act time<br />
Setting of the pre-act time Tv (period of time in which a defined manipulated variable is reached more quickly than with a<br />
P controller because of the D component).<br />
DERIV TIME = 10 % ... 1000 % corresponds to Tv = 0.01s...1s<br />
Factory setting: DERIV TIME = 100 % corresponds to Tv = 0.1s<br />
45: FIELD BUS<br />
Selection of the setpoint input<br />
❑ Analog<br />
❑ Fieldbus (future option)<br />
46: RELEASE<br />
Current software version VXX<br />
11. Error messages<br />
18<br />
!<br />
PRESS ←<br />
ERROR RUN 1<br />
PRESS ←<br />
ERROR RUN 2.1<br />
PRESS ←<br />
ERROR RUN 2.2<br />
ADJUST NOZZLE(S)<br />
Changing the factory setting of 43/44 may result in uncontrolled hunting of the valve.<br />
Display Possible cause Troubleshooting<br />
Direction of action of the actuator cannot be<br />
determined.<br />
Reason:<br />
a) No air supply<br />
b) Wrong connection of position sensor<br />
No zero adjustment possible.<br />
Reason:<br />
a) Faulty position sensor<br />
b) Wrong position sensor (mechanical travel<br />
does not correspond to the electrical<br />
displacement of the position sensor).<br />
No stroke adjustment possible.<br />
Fieldbus:<br />
a) Faulty position sensor<br />
b) Wrong position sensor<br />
c) Wrong connection of position sensor<br />
(mechanical travel does not correspond to<br />
the electrical displacement of the position<br />
sensor).<br />
Positioning time of valve under 1 second.<br />
Connect pressure supply and check pneumatic<br />
connections to the actuator.<br />
Check assignment plan for correct terminal<br />
connection (see fig. 3).<br />
Drive valve by hand.<br />
Display value x must change.<br />
The display value must be > 2 % in CLOSE<br />
position.<br />
Drive valve by hand.<br />
Display value x must change.<br />
The display value must be < 98 % in OPEN<br />
position.<br />
Check assignment plan for correct terminal<br />
connection (see fig 3).<br />
Adjust flow restrictor D1 (single acting<br />
actuator) and/or flow restrictors D1 and D2<br />
(double acting actuators).<br />
Turn clockwise for longer positioning time.
INSTALLATION <strong>POSIMATIC</strong><br />
12. Technical characteristics<br />
General<br />
Protection to EN 60529 IP 65<br />
Dimensions L x W x H 160 x 90 x 84 mm<br />
Weight 1,6 kg<br />
Assembly position any<br />
EU/EMC directive 89/336/EEC<br />
EU low voltage directive 73/23/EEC<br />
Emission EN 50081-2<br />
Immunity EN 50082-2<br />
Failsafe function In case of breakdown of<br />
(single acting) electrical or pneumatic supply,<br />
the valve is set into the safety<br />
position by spring return and<br />
exhaust action.<br />
Electrical characteristics<br />
- Power supply<br />
Power supply 24 VDC ± 10%<br />
Consumption ≤ 7,2 W (during operation)<br />
≤ 2,4 W (in steady state)<br />
Accuracy of<br />
characteristic curves ≤ 1 %<br />
- Input/output signals<br />
Input signals a) 0-10V; b) 0/4...20 mA<br />
Input resistance a) 200 kΩ; b) 250 Ω<br />
Position feedback 0-10 V; 4...20 mA (optional)<br />
Binary outputs 2 alarm outputs<br />
1 error output<br />
Fieldbus module (optional) Profibus-DP, Interbus<br />
(future product)<br />
Electrical connection<br />
Power supply M16 cable entry<br />
Input signal M16 cable entry<br />
Operating conditions<br />
Ambient temperature 0...60°C<br />
Storage temperature 0...60°C<br />
Control medium Air or neutral gas, filtered at<br />
50 µm, lubricated or not<br />
Pressure range 0 - 6 bar<br />
Air rates 35 or 70 Nl/min. according to<br />
type<br />
Air consumption<br />
(in steady state) 0 Nl/min<br />
Functional characteristics<br />
Control function 1. Spring in retracted position<br />
2. Spring in extended position<br />
3. Double acting<br />
Operation - Automatic startup/tuning<br />
- Automatic<br />
- Manual<br />
Parameters adjustable<br />
(see list of parameters p. 5/6)<br />
Materials<br />
Body Aluminium, coated<br />
Display cover PMMA<br />
Keyboard cover PMMA<br />
Displacement<br />
measuring system Alu, anodised<br />
PEEK<br />
PAI<br />
NBR<br />
Displacement measuring system<br />
Linear version (potentiometer)<br />
Assembly external<br />
Stroke 0-30, 0-50, 0-75 mm<br />
Connection pre-assembled cable<br />
Rotary version (potentiometer)<br />
Assembly external<br />
Slew angle 0-100°<br />
Connection pre-assembled cable<br />
}<br />
}<br />
linear version<br />
rotary version<br />
19
<strong>POSIMATIC</strong> INSTALLATION<br />
13. Assembly options with other actuators as series 290 / 390, consult us<br />
20<br />
Assembly of linear actuators<br />
external NAMUR bracket<br />
Assembly of rotary actuators<br />
external NAMUR adapter V NAMUR adapter H
INSTALLATION <strong>POSIMATIC</strong><br />
14. Dimensions<br />
Front view Rear view<br />
Side view (from left) Side view (from right)<br />
Side view (from bottom) Side view (from top)<br />
Legend<br />
A1: pneumatic outlet A1 (port on single acting actuators)<br />
A2: pneumatic outlet A2 (port on double acting actuators)<br />
P: Air supply<br />
R: Exhaust<br />
D1: Flow restrictor D1 → acts on A1<br />
D2: Flow restrictor D2 → acts on A2<br />
RV: Non-return valve<br />
PE<br />
21
<strong>POSIMATIC</strong> INSTALLATION<br />
A<br />
A1 (pneumatic outlet) ..................................................... 6<br />
A2 (pneumatic outlet) ..................................................... 6<br />
ALARM FUNCTN ................................................... 12, 13<br />
Assembly kit ................................................................... 5<br />
Assembly options ......................................................... 22<br />
AUTO.............................................................................. 9<br />
Automatic mode ............................................................ 10<br />
C<br />
Characteristic curve<br />
Equal percentage .................................................... 17<br />
Freely programmable ............................................... 17<br />
Linear ...................................................................... 17<br />
Characteristic valve curves ........................................... 17<br />
Close tight function ....................................................... 15<br />
CLOSE TIGHT ........................................................ 12, 15<br />
CONFIG ................................................................... 9, 10<br />
Configuration ................................................................ 10<br />
D<br />
D1 (flow restrictor 1) ................................................. 9, 21<br />
D2 (flow restrictor 2) ................................................. 9, 21<br />
DEADBAND ........................................................... 13, 17<br />
DEFAULT STATE .................................................8, 12, 13<br />
Delivery .......................................................................... 4<br />
DERIV TIME ........................................................... 13, 18<br />
Description of parameters ............................................ 13<br />
Description of symbols ................................................... 3<br />
Dimensions................................................................... 21<br />
Direction of action ......................................................... 15<br />
Direction of manipulated variable .................................. 13<br />
E<br />
Electrical connections ..................................................... 7<br />
ERROR FUNCTN ................................................... 12, 14<br />
ERROR LEVEL ...................................................... 12, 14<br />
Error messages ............................................................ 18<br />
Error output .................................................................. 14<br />
ERROR TIME ......................................................... 12, 14<br />
Exhaust (R) .................................................................. 21<br />
F<br />
Factory settings ............................................................ 10<br />
Factory settings, with ...................................................... 8<br />
FIELD BUS ................................................................... 18<br />
FIELDBUS .................................................................... 13<br />
Fitting the positioner to a linear actuator ......................... 5<br />
Fitting the positioner to a rotary actuator ........................ 5<br />
Flow characteristics ...................................................... 16<br />
FLOW ........................................................................... 17<br />
FREE ............................................................................ 12<br />
22<br />
Index<br />
I<br />
INACTIVE signal ........................................................... 14<br />
INIT ALL ..............................................................9, 12, 13<br />
Initialisation positioning time ........................................... 9<br />
Initialisation process ....................................................... 9<br />
Initialisation ..................................................................... 8<br />
Integration of options .................................................... 11<br />
L<br />
LEVEL ALARM 1 .......................................................... 14<br />
LEVEL ALARM 2 .......................................................... 14<br />
LEVEL ALARM1 ........................................................... 12<br />
LEVEL ALARM2 ........................................................... 12<br />
Limit contacts ............................................................... 13<br />
Limitation of closing speed ........................................... 14<br />
Limitation of stroke ....................................................... 14<br />
Limiting of manipulated variable.................................... 14<br />
Linearisation ................................................................. 17<br />
List of parameters ................................................... 12, 13<br />
M<br />
Manual adjustment ......................................................... 9<br />
Manual mode ................................................................ 10<br />
MANUAL .................................................................. 9, 10<br />
Manufacturer’s specifications .......................................... 4<br />
MAX POSITION ..................................................... 12, 15<br />
Mechanical assembly ..................................................... 5<br />
MIN POSITION....................................................... 12, 14<br />
Monitoring of deviations ................................................ 14<br />
Monitoring time ............................................................. 14<br />
N<br />
NO INIT .......................................................................... 8<br />
Non-return valve (RV) ................................................... 21<br />
O<br />
Operating instructions<br />
General...................................................................... 7<br />
Operating mode ............................................................ 10<br />
P<br />
P (pneumatic air supply) ................................................. 6<br />
Plug-in module.............................................................. 11<br />
Pneumatic connections .................................................. 6<br />
Position feedback, analog ............................................. 11<br />
POSITION .................................................................... 17<br />
Pre-act time Tv ............................................................. 18<br />
PROP GAIN ........................................................... 13, 18<br />
Proportional gain Kp ..................................................... 18
INSTALLATION <strong>POSIMATIC</strong><br />
R<br />
R (exhaust) ................................................................... 21<br />
Range control ............................................................... 14<br />
RANGE FUNCTN ................................................... 12, 14<br />
Response threshold...................................................... 14<br />
Flow restrictors, integrated ............................................. 9<br />
Run (initialisation) ........................................................... 9<br />
Run initialisation ............................................................. 9<br />
RV (non-return valve) ................................................... 21<br />
S<br />
Safety ............................................................................. 4<br />
SETP DIRECTN ..................................................... 12, 15<br />
SETP FUNCTN ...................................................... 12, 16<br />
SETP RAMP ........................................................... 12, 16<br />
Setpoint direction .......................................................... 15<br />
Setpoint function ........................................................... 16<br />
Setpoint input, selection of ............................................ 18<br />
Setpoint ramp ............................................................... 16<br />
SETPOINT ..........................................................9, 12, 13<br />
SOFT RELEASE .................................................... 13, 18<br />
Software version ........................................................... 18<br />
SPLIT END ............................................................. 12, 16<br />
Split range .................................................................... 16<br />
SPLIT START ......................................................... 12, 16<br />
Standardisation of manipulated variable ....................... 17<br />
Startup ............................................................................ 8<br />
Storage ........................................................................... 3<br />
Symbols.......................................................................... 3<br />
T<br />
Technical data............................................................... 19<br />
Terminal assignment....................................................... 7<br />
Tight closing with manipulated variable......................... 15<br />
Transport ........................................................................ 3<br />
X<br />
X-DIRECTION ........................................................ 12, 13<br />
X-DISPLAY ............................................................. 13, 17<br />
Manufacturer’s Declaration<br />
in accordance with the EU directive for machinery 89/392/EEC Annex II B<br />
We hereby declare that the device described in this installation manual is intended for incorporation into or assembly with<br />
other machinery and that it must not be put it into service until the machinery into which it is to be incorporated has been<br />
declared in conformity with the provisions of the EU directive 89/392/EWG.<br />
Handling, assembly and putting into service and all settings and adjustments must be carried out by authorised<br />
qualified personnel only.<br />
This product complies with the essential requirements of the EMC Directive 89/336/EEC as amended. It is CE-approved. A<br />
separate Declaration of Conformity is available on request.<br />
A separate Declaration of Incorporation relating to the EU Directive 89/392/EEC Annex II B is available on request. Please<br />
provide ordering code and serial numbers of products concerned.<br />
23
Positionneur électropneumatique<br />
série 606<br />
<strong>POSIMATIC</strong><br />
Manuel d'installation<br />
IM165-2-X.FR.R0<br />
(383 45 96)<br />
F
<strong>POSIMATIC</strong> INSTALLATION<br />
2<br />
Table des matières<br />
1. Instructions de sécurité .................................................................................................................................. 3<br />
1.1 Généralités ............................................................................................................................................ 3<br />
1.2 Description des symboles ...................................................................................................................... 3<br />
1.3 Instructions de sécurité électrique et pneumatique................................................................................. 4<br />
1.4 Utilisation optimale ................................................................................................................................ 4<br />
1.5 Outils nécessaires pour l’assemblage et le raccordement ...................................................................... 4<br />
2. Spécifications du fabricant ............................................................................................................................. 4<br />
2.1 Examen de la livraison........................................................................................................................... 4<br />
3. Assemblage mécanique ................................................................................................................................. 5<br />
3.1 Montage sur les actionneurs linéaires .................................................................................................... 5<br />
3.2 Montage sur les actionneurs rotatifs ...................................................................................................... 5<br />
3.3 Montage séparé ..................................................................................................................................... 5<br />
4. Raccordements pneumatiques ....................................................................................................................... 6<br />
5. Raccordements électriques ............................................................................................................................ 7<br />
6. Fonctionnement ............................................................................................................................................. 7<br />
6.1 Commandes et afficheur ........................................................................................................................ 7<br />
6.2 Niveaux d’accès .................................................................................................................................... 8<br />
7. Mise en route ................................................................................................................................................. 8<br />
7.1 Instructions générales de fonctionnement .............................................................................................. 8<br />
7.2 Initialisation (C : CONFIG, D : NO INIT) ................................................................................................. 8<br />
7.2.1Réglages. ...................................................................................................................................... 8<br />
7.2.2Réglages en usine (positionneur monté sur vanne) ....................................................................... 10<br />
8. Modes de fonctionnement ............................................................................................................................. 10<br />
8.1 Mode automatique (A : AUTO) ...............................................................................................................10<br />
8.2 Mode manuel (B : MANUAL) ................................................................................................................. 10<br />
8.3 Configuration (C : CONFIG) ...................................................................................................................10<br />
9. Intégration des options ..................................................................................................................................11<br />
9.1 Module enfichable pour boucle analogique de rétroaction de position ....................................................11<br />
10. Liste des paramètres ....................................................................................................................................12<br />
10.1 Description des paramètres ..................................................................................................................13<br />
11. Messages d’erreur ........................................................................................................................................18<br />
12. Caractéristiques techniques .......................................................................................................................... 19<br />
13. Options de montage ...................................................................................................................................... 20<br />
14. Dimensions ...................................................................................................................................................21<br />
Index .....................................................................................................................................................................22<br />
NOTE<br />
Les informations contenues dans ce manuel sont susceptibles d’être modifiées sans préavis.<br />
En aucun cas <strong>ASCO</strong>/JOUCOMATIC ne sera responsable des erreurs techniques ou rédactionnelles ou<br />
des omissions. De même aucune responsabilité n’est assumée pour les dommages accidentels ou indirects<br />
qui pourraient survenir hors ou en liaison avec la fourniture ou l’utilisation des informations contenues<br />
ci-après.<br />
CE MANUEL CONTIENT DES INFORMATIONS PROTÉGÉES PAR COPYRIGHT. AUCUNE PARTIE<br />
DE CE DOCUMENT NE PEUT ÊTRE PHOTOCOPIÉE OU REPRODUITE SOUS AUCUNE FORME<br />
OU MANIÈRE QUE CE SOIT, SANS AUTORISATION PRÉALABLE ÉCRITE DE <strong>ASCO</strong>/JOUCOMATIC.<br />
COPYRIGHT © 2000/2001 - <strong>ASCO</strong>/JOUCOMATIC - Tous droits réservés.
INSTALLATION <strong>POSIMATIC</strong><br />
1. Instructions de sécurité<br />
Veuillez lire et observer les prescriptions de sécurité suivantes :<br />
1.1 Généralités<br />
Pour assurer le fonctionnement correct du positionneur, veuillez tenir compte de ce qui suit :<br />
- Assurez un transport et un stockage adaptés.<br />
- L’installation et la mise en marche doivent être effectuées uniquement par du personnel expérimenté et qualifié.<br />
- Le positionneur doit être mis en fonctionnement selon les instructions contenues dans ce manuel d’installation.<br />
- Assurez une maintenance correcte et un entretien approprié.<br />
Veuillez suivre :<br />
- Les instructions contenues dans ce manuel d’installation.<br />
- Toutes les règles de sécurité liées à l’installation et au fonctionnement des appareillages électriques.<br />
- Cet appareil ne doit pas être mis en fonctionnement en atmosphère explosible.<br />
Les règlements, les normes et les directives mentionnés dans ce manuel d’installation ne sont applicables que pour les<br />
membres des États de l’Union Européenne. Si le positionneur <strong>POSIMATIC</strong> est utilisé en dehors de l’Union Européenne,<br />
veuillez appliquer les règles et règlements locaux.<br />
1.2 Description des symboles<br />
Dans tout ce manuel, les symboles suivants attirent l’attention sur des informations importantes :<br />
!<br />
Avertissement<br />
!<br />
i<br />
Avertissement. L’inobservation des instructions contenues dans ce manuel peut avoir comme conséquence<br />
de mettre la vie et la santé en danger et/ou d’entraîner des dommages substantiels aux<br />
biens.<br />
Attention. L’inobservation des mesures de sécurité repérées par ce symbole peut entraîner de légères<br />
blessures aux personnes et/ou des dommages aux biens.<br />
Nota. Ce symbole se rapporte à des informations importantes concernant le positionneur<br />
<strong>POSIMATIC</strong>.<br />
Ce produit est conforme aux exigences essentielles de la Directive 89/336/CEE sur la Compatibilité Electromagnétique,<br />
et amendements. Il est certifié CE. Une déclaration de conformité peut être fournie sur<br />
simple demande.<br />
Conformément à la directive CEE 89/392/CEE Annexe II B, une Déclaration d'incorporation peut être fournie<br />
sur demande. Veuillez nous indiquer le numéro d'accusé de réception (AR) et les références ou codes des<br />
produits concernés.<br />
3
<strong>POSIMATIC</strong> INSTALLATION<br />
!<br />
Avertissement<br />
1.4 Utilisation optimale<br />
4<br />
1.3 Instructions de sécurité électrique et pneumatique<br />
Le montage, les raccordements électriques et pneumatiques ainsi que la mise en route du<br />
positionneur d’avertissement <strong>ASCO</strong>/JOUCOMATIC doivent être effectués uniquement par du personnel<br />
expérimenté et qualifié.<br />
La sécurité électrique de tous les équipements d’alimentation en puissance doit être assurée.<br />
Veuillez prévoir les équipements suivants :<br />
- une alimentation 24 V courant continu,<br />
- une sortie analogique de 0-20 mA/4-20 mA pour le point de consigne courant (bornes Iw+, Iw-),<br />
- ou une sortie analogique de 0-10 V (bornes Uw+, Uw-).<br />
Toutes les spécifications électriques doivent être observées.<br />
Toutes les mesures de sécurité pour l’installation et le démarrage des actionneurs pneumatiques<br />
doivent être respectées. Les forces importantes produites par les actionneurs de positionnement<br />
peuvent provoquer des blessures.<br />
Le <strong>POSIMATIC</strong> est un positionneur électropneumatique intelligent à monter sur des actionneurs linéaires ou rotatifs à<br />
fonctionnement pneumatique. Le positionneur peut être monté directement sur l’actionneur avec un kit de montage correspondant,<br />
contenant un support ou un adaptateur de montage, le capteur de position et les vis de fixation nécessaires. Le<br />
positionneur peut également être installé séparément. Aucun support ou adaptateur n’est alors nécessaire.<br />
1.5 Outils nécessaires pour l’assemblage et le raccordement<br />
- Clés ouvertes - dimensions sur plats : 8, 10, 27.<br />
- Clés Allen : 3 et 4 millimètres.<br />
- Tournevis : 3,5 millimètres.<br />
2. Spécifications du fabricant<br />
2.1 Examen de la livraison<br />
Veuillez examiner la livraison immédiatement à la réception pour vous assurer qu’elle est complète et intacte. La composition<br />
de la livraison est détaillée dans les documents d’expédition. Vérifiez les produits livrés et les codes de commande<br />
pour voir si la fabrication et la quantité sont conformes à votre commande ou non. Le positionneur <strong>ASCO</strong>/JOUCOMATIC est<br />
prêt pour une utilisation immédiate.
INSTALLATION <strong>POSIMATIC</strong><br />
3. Assemblage mécanique<br />
3.1 Montage sur les actionneurs linéaires<br />
- L’actionneur doit être dans sa position initiale (actionneur sorti).<br />
- Insérez l’équerre de montage (1) entre la tête de l’actionneur (2) et le<br />
capteur de position (3) et fixez-le en serrant le capteur de position avec<br />
l’écrou hexagonal (4).<br />
- Vissez le positionneur à l’équerre de montage (1) avec deux vis M6 (5).<br />
- Dévissez et ouvrez le capot du positionneur.<br />
- Introduisez le câble du capteur de position linéaire dans le presse étoupe<br />
M12 (6) du positionneur et connectez-le à la plaque à bornes selon le plan<br />
d’affectation de câblage (voir le paragraphe 5).<br />
- Vissez ensuite fortement la bague du presse étoupe M12. Le câble doit y<br />
être serré fortement.<br />
3.2 Montage sur les actionneurs rotatifs<br />
- L’actionneur doit être dans sa position initiale.<br />
- Vissez le capteur de position rotatif (3) avec le support de montage<br />
(1) sur l’actionneur.<br />
Positionnement du potentiomètre rotatif sur un<br />
actionneur rotatif (vue de dessus)<br />
Marquage adaptateur<br />
Raccordement<br />
pneumatique<br />
Marquage de l‘axe<br />
du potentiomètre<br />
i<br />
Actionneur<br />
Vanne<br />
ouverte<br />
Potentiomètre rotatif<br />
3.3 Montage séparé<br />
Vanne fermée<br />
Arbre d‘entraînement (vue<br />
de dessus)<br />
Axe du potentiomètre<br />
rotatif<br />
Adaptateur<br />
Raccordement du<br />
potentiomètre rotatif<br />
Disque de vanne fermée<br />
- L’actionneur doit être dans sa position initiale (actionneur sorti).<br />
- Montez le capteur de position comme décrit aux paragraphes 3.1 et/ou 3.2.<br />
1<br />
3<br />
6<br />
5<br />
1<br />
Fig. 1 : Montage sur l‘actionneur linéaire<br />
2<br />
Fig. 2 : Montage sur l‘actionneur rotatif<br />
4<br />
3<br />
4 2<br />
- Montez le positionneur avec l’adaptateur NAMUR (4) directement<br />
sur l’actionneur rotatif (2).<br />
- Dévissez et ouvrez le capot du positionneur.<br />
- Introduisez le câble du capteur de position linéaire dans le<br />
presse étoupe M12 (6) du positionneur et connectez-le à la<br />
plaque à bornes selon le plan d’affectation de câblage (voir<br />
le paragraphe 5).<br />
- Vissez ensuite fortement la bague du presse étoupe M12.<br />
Le câble doit y être serré fortement.<br />
- Observez la position de montage correcte du capteur de position rotatif par rapport au "pivot à<br />
joues“.<br />
6<br />
5
<strong>POSIMATIC</strong> INSTALLATION<br />
4. Raccordements pneumatiques<br />
- Établissez le raccordement entre la sortie pneumatique A1 (simple effet) ou les sorties A1 et A2 (double effet) du<br />
positionneur et l’entrée de pression pilote pneumatique de l’actionneur.<br />
- Reliez l’alimentation de pression à l’accès P (maximum 6 bar ou 90 psi).<br />
6<br />
!<br />
Attention : Respectez la pression maximale de pilotage des actionneurs !<br />
Vue arrière Vue de côté (de gauche)<br />
Fig. 2 : Raccordements pneumatiques<br />
Légende :<br />
A1 : Sortie pneumatique A1 (actionneurs à simple ou double effet)<br />
A2 : Sortie pneumatique A2 (actionneurs à double effet)<br />
P : Alimentation en pression<br />
R : Echappement<br />
Fonctions de l'actionneur :<br />
"Fonction de commande 1" : dispositif à simple effet avec le ressort en position retracté.<br />
"Fonction de commande 2" : dispositif à simple effet avec le ressort en position détendu.<br />
"Fonction de commande 3" : dispositif à double effet.
INSTALLATION <strong>POSIMATIC</strong><br />
5. Raccordements électriques<br />
!<br />
- Fermez le capot et vissez-le fortement.<br />
!<br />
6. Fonctionnement<br />
6.1 Commandes et afficheurs<br />
- Connectez le capteur de position.<br />
- Connectez le signal de point de consigne 0-20 mA/4-20 mA ou 0-10 V aux bornes correspondantes.<br />
- Connectez le câble de l‘alimentation 24 V CC.<br />
Fig. 3 : Affectation des bornes<br />
Veillez à ne pas endommager le joint et le câble.<br />
⇐ ⇒ + -<br />
Fig. 4 : Commandes et afficheurs<br />
or orange<br />
gn vert<br />
bl bleu<br />
gr gris<br />
2 3 4 5<br />
jaune vert rouge noir<br />
1<br />
Légende<br />
10 V ⎫ gn Raccordement du<br />
X ⎬ br système de mesure<br />
⎭ de déplacement externe<br />
Iw+ ⎫ Entrée point de consigne<br />
Iw-<br />
⎬<br />
⎭ 0/4-20 mA<br />
Uw+<br />
Uw-<br />
⎫<br />
⎬<br />
⎭<br />
Entrée point de consigne<br />
0-10 V<br />
X+<br />
X-<br />
⎫<br />
⎬<br />
⎭<br />
Sortie signal rétro. 0-10V<br />
4-20 mA (optionnel)<br />
GND ⎫<br />
⎬<br />
24 V ⎭<br />
Tension d‘alimentation<br />
24 V continu<br />
Terre<br />
A1 Alarme 1<br />
A2 Alarme 2<br />
ERR Sortie erreur<br />
⊥ Sortie GND<br />
Borne de terre externe : Mise à la<br />
terre pour la protection des<br />
personnes.<br />
1 Afficheur deux lignes de 16<br />
caractères chacune<br />
2 Touche retour (jaune)<br />
3 Touche avance (vert)<br />
4 Touche déplacement vers le haut +<br />
(rouge)<br />
5 Touche déplacement vert le bas -<br />
(noir)<br />
7
<strong>POSIMATIC</strong> INSTALLATION<br />
6.2 Niveaux d’accès<br />
Les deux niveaux d’accès suivants sont prévus pour le fonctionnement du positionneur :<br />
Niveau de commande (A : AUTO, B : MANUAL).<br />
Ce niveau est automatiquement paramétré chaque fois que le positionneur est mis en marche. Vous pouvez basculer entre<br />
les modes de fonctionnement AUTO et MANUAL. En mode MANUAL (MANUEL), la vanne peut être actionnée avec la<br />
touche + et la touche -. La valeur spécifiée est activée seulement quand la touche � est pressée. Ceci vous permet de<br />
tester les réactions aux sauts. En mode de fonctionnement AUTO, la vanne est commandée par un signal de point de<br />
consigne.<br />
Niveau de configuration (C: CONFIG)<br />
Différents paramètres peuvent être paramétrés à ce niveau (voir la liste des paramètres à la page 12). Ceci permet de<br />
prévoir l’adaptation optimale à votre application spécifique.<br />
7. Mise en route<br />
- Activez l’alimentation en pression pneumatique (respectez la pression maximale de pilotage !).<br />
- Mettez en marche l’alimentation 24 V CC [bornes 24V (+) et ⊥ (-)].<br />
- Spécifiez le point de consigne analogique 0-20 mA, 4-20 mA ou 0-10 V.<br />
7.1 Instructions générales de fonctionnement<br />
8<br />
i<br />
i<br />
i<br />
Les deux vis de la protection des touches doivent être desserrées pour modifier les réglages et les<br />
paramètres du positionneur. Tirez légèrement la protection pour la retirer.<br />
Les différents niveaux de fonctionnement et les paramètres peuvent être consultés avec les touches ← et →. Les paramètres<br />
peuvent être modifiés avec les touches + et -. Une pression sur la touche ← ou → sauvegarde automatiquement les<br />
nouvelles valeurs.<br />
Retour rapide : Pressez ← et → pour revenir à A : AUTO.<br />
Fonction mémoire : Entrez dans la rubrique menu C : CONFIG pour revenir au menu sélectionné<br />
précédemment.<br />
7.2 Initialisation (C: CONFIG, D: NO INIT)<br />
7.2.1 Réglages<br />
Après l’assemblage et les raccordements électriques et pneumatiques, le positionneur doit être initialisé. Sans initialisation,<br />
le positionneur est en mode de fonctionnement "D : NO INIT". Ce mode de fonctionnement peut également être obtenu en<br />
choisissant "DEFAULT" dans le menu "3 : DEFAULT STATE".<br />
En mode de fonctionnement "D : NO INIT", vous pouvez OUVRIR et FERMER la vanne manuellement<br />
par pression sur les touches + et -.<br />
Pressez sur + et - pour OUVRIR l’actionneur à grande vitesse.<br />
Pressez sur - et + pour FERMER l’actionneur à grande vitesse.
INSTALLATION <strong>POSIMATIC</strong><br />
- Pressez ← une fois pour appeler "C : CONFIG".<br />
- Pressez → approximativement 3 secondes jusqu’à ce que la ligne d’affichage supérieure disparaisse. "1 : SETPOINT"<br />
(Point de consigne) est affiché. Utilisez les touches + et - pour sélectionner l’entrée du point de consigne dans la ligne<br />
d’affichage supérieure (0-20 mA, 4-20 mA ou 0-10 V).<br />
- Pressez → pour appeler "2 : INIT ALL" :<br />
"NO INIT" apparaît sur la ligne d’affichage supérieure.<br />
- Pressez sur + ou - et ensuite sur → pendant 3 secondes.<br />
Les étapes d’initialisation automatiques run1… run5 démarrent.<br />
Ce processus peut prendre quelques minutes.<br />
- Pendant le run3, le temps de positionnement réel pour OUVERT (vers le haut) et FERMER (vers le bas) est affiché<br />
pendant 5 secondes. Le temps de positionnement peut être modifié par une pression sur → pendant ces 5 secondes.<br />
- "ADJUST NOZZLE(S) THEN PRESS ←" est affiché.<br />
- Vous pouvez alors ajuster les limiteurs de débit intégrés D1 et D2 (D2 uniquement disponible pour les actionneurs à<br />
double effet) (tournez dans le sens des aiguilles d’une montre pour des temps de positionnement plus longs).<br />
(temps de positionnement minimum de vanne > 1 s)<br />
- Vérifiez le réglage par pression sur la touche ←. Le nouveau réglage du temps de positionnement est affiché. Si aucune<br />
touche n’est pressée dans les 5 secondes suivantes, le sous-programme d’initialisation se poursuit automatiquement.<br />
Après que l’initialisation ait été réalisée avec succès, "INIT OK" apparaît dans la ligne d’affichage supérieure.<br />
- Pressez sur ← trois fois jusqu’à ce que "A : AUTO" soit affiché.<br />
Le positionneur est opérationnel. (Note : Un signal externe de point de consigne est nécessaire.)<br />
i<br />
Après mise en marche<br />
Si vous faites fonctionner un actionneur en "control function 2" (ressort en position détendu) nous<br />
vous recommandons d’intégrer un limiteur de débit externe dans l’entrée d’air (accès P).<br />
Réglage : - Ouvrez le limiteur de débit interne D.<br />
- Réglez le limiteur de débit externe de telle sorte qu’une vitesse de positionnement<br />
> 1 seconde soit atteinte.<br />
- Réglez les temps de positionnement OUVERT/FERMÉ avec le limiteur de débit<br />
interne (si besoin).<br />
- Réglez le paramètre 24 : SETP DIRECTN à INVERS.<br />
9
<strong>POSIMATIC</strong> INSTALLATION<br />
7.2.2 Réglages en usine (positionneur monté sur vanne)<br />
"A : AUTO" est affiché. Le positionneur est opérationnel.<br />
Si vous souhaitez piloter la vanne à la main, pressez la touche → une fois.<br />
"B : MANUAL" est affiché.<br />
La valeur peut être ajustée avec les touches + et -, et la vanne peut être pilotée dans la position désirée avec la touche →.<br />
Le positionneur doit être de nouveau initialisé après chaque remplacement de vanne ou de diaphragme. Pour cela, appelez<br />
le menu "2 : INIT ALL" et procédez comme décrit au paragraphe 7.2.1.<br />
Pour la "control function 2" réglez le paramètre 24 : SETP DIRECTN à INVERS.<br />
8. Modes de fonctionnement<br />
8.1 Mode automatique (A : AUTO)<br />
Le mode automatique est le mode standard de fonctionnement. Le positionneur initialisé réagit automatiquement aux<br />
changements du point de consigne et met la vanne en mouvement en conséquence.<br />
Les touches + et - n’ont aucune action dans ce mode de fonctionnement.<br />
La position réelle (x) est affichée en pourcentage ainsi qu’une barre analogique dans la ligne d’affichage supérieure.<br />
Dans la ligne d’affichage inférieure, le mode de fonctionnement courant est affiché du côté gauche et le point de consigne<br />
courant (w) est affiché en pourcentage du côté droit.<br />
8.2 Mode manuel (B : MANUAL)<br />
Pressez la touche → pour accéder à la rubrique du menu "B : MANUAL".<br />
La vanne peut être pilotée à la main en mode de fonctionnement manuel. La valeur peut être ajustée avec les touches + et<br />
- et la vanne est pilotée dans la position désirée avec la touche →.<br />
8.3 Configuration (C : CONFIG)<br />
Pressez la touche → pour accéder aux réglages de configuration (C : CONFIG).<br />
10
INSTALLATION <strong>POSIMATIC</strong><br />
Les paramètres du positionneur peuvent être changés dans le menu de configuration. La valeur des paramètres est présentée<br />
dans la ligne d’affichage supérieure ; le numéro du paramètre et le nom sont donnés dans la ligne d’affichage inférieure. Les<br />
réglages sont faits comme indiqué ci-dessus. Voir le paragraphe 10.1 pour la description des paramètres.<br />
9. Intégration des options<br />
Toutes les options commandées avec le positionneur sont pré-montées à la livraison et prêtes à l’emploi. Si vous souhaitez<br />
ajouter des options ultérieurement, consulter notre Support produit.<br />
11
<strong>POSIMATIC</strong> INSTALLATION<br />
10. Liste des paramètres<br />
12<br />
Positionneur électropneumatique : Liste des paramètres<br />
Affichage Fonctions Valeur des Paramètres Unité Réglages usine<br />
1 : SETPOINT Plage du point de consigne 0..10 V V 4..20 mA<br />
0..20 mA<br />
4..20 mA<br />
mA<br />
2 : INIT ALL Initialisation de l’actionneur NO INIT - NO INIT<br />
et du positionneur INIT OK<br />
3 : DEFAULT STATE Rétablissement NO DEFAULT - DEFAULT<br />
des réglages usine DEFAULT<br />
11 : X-DIRECTION Direction affichage X et de la RISE RISE<br />
valeur de sortie de rétroaction FALL<br />
12 : ALARM FUNCTN Fonction alarme OFF OFF<br />
Sorties binaire min/max<br />
(Alarme 1, Alarme 2) min/min<br />
max/max<br />
13 : LEVEL ALARM 1 Réponse seuil Alarme 1 0.0...10 % 10.0<br />
14 : LEVEL ALARM 2 Réponse seuil Alarme 2 0.0...100 % 90.0<br />
15 : ERROR FUNCTN Déclenchement de ERROR ERROR + RANGE<br />
la sortie erreur ERROR + INACTIVE<br />
RANGE<br />
ERROR + RANGE<br />
ERR+RANGE+INAC<br />
16 : ERROR TIME Surveillance du temps de<br />
positionnement de la vanne<br />
auto s auto<br />
(Sortie erreur) 0...100<br />
17 : ERROR LEVEL Ecart Max. auto % auto<br />
(Sortie erreur) 0.0...100<br />
18 : RANGE FUNCTN Surveillance de l’entrée du < 4mA mA 20 mA<br />
point de consigne/plage > 20mA<br />
de sortie erreur < 4mA or > 20mA<br />
21 : MIN POSITION Etalonnage de la position<br />
Position minimum<br />
0.0...100 % 0.0<br />
22 : MAX POSITION Etalonnage de la position<br />
Position maximum<br />
0.0...100 % 100<br />
23 : CLOSE TIGHT Fonction “Close tight” à non non<br />
la position minimum/maximum min<br />
max<br />
min & max<br />
24 : SETP DIRECTN Direction de l’action du NORMAL NORMAL<br />
point de consigne INVERSE<br />
25 : SETP RAMP Fonction “Ramp” du auto s 0<br />
point de consigne 0...400<br />
26 : SPLIT START Point de consigne de début<br />
de la plage partagée<br />
0.0...100 % 0.0<br />
27 : SPLIT END Point de consigne de fin<br />
de la plage partagée<br />
0.0...100 % 100<br />
28 : SETP FUNCTN Fonction de linéarisation linéaire linéaire<br />
pour le point de consigne 1 : 25<br />
Position � Débit 1 : 50<br />
libre (1:25 inverse)<br />
30 : FREE 0 % Définition d’une courbe (libre) 0...100 % 0.0<br />
31 : FREE 10 % de caractéristiques librement 28.5<br />
32 : FREE 20 % programmables 50.0<br />
33 : FREE 30 % 11 points 62.6<br />
34 : FREE 40 % 71.5<br />
35 : FREE 50 % 78.5<br />
36 : FREE 60 % 84.1<br />
37 : FREE 70 % 88.9<br />
38 : FREE 80 % 93.1<br />
39 : FREE 90 % 96.7<br />
40 : FREE 100 % 100
INSTALLATION <strong>POSIMATIC</strong><br />
10.1 Description des paramètres<br />
1: SETPOINT<br />
Plage de l’entrée analogique du point de consigne (Tension : 0-1 0 V ou Courant : 0-20 mA, 4-20 mA).<br />
2: INIT ALL<br />
Initialisation.<br />
L’initialisation automatique est activée par pression sur les touches + ou - et → → (> 3 secondes).<br />
Les différentes étapes de l’initialisation sont affichées par "run 1" à "run 5".<br />
Les paramètres de commande du positionneur pour piloter la vanne sont optimisés pendant l’initialisation.<br />
3: DEFAULT STATE<br />
Réglage standard ou rétablissement des réglages usine et re-réglage de l’initialisation.<br />
Le positionneur est réglé sur "Default" par pression sur les touches + ou - et → → (> 3 secondes).<br />
i<br />
Positionneur électro-pneumatique : Liste des paramètres<br />
Affichage Fonctions Valeur des Paramètres Unité Réglages usine<br />
41 : X-DISPLAY Affichage de position POSITION % POSITION<br />
ou de débit DEBIT<br />
42 : DEADBAND Taille de la zone morte auto<br />
0.0...10.0<br />
auto<br />
43 : PROP GAIN Gain proportionnel gain 10...1000 100<br />
(Positionneur PD) (K = 0,1...10)<br />
p<br />
44 : DERIV TIME Constante de temps 10...1000 100<br />
différentielle<br />
(Positionneur PD)<br />
T = 0,01 s ...1 s)<br />
v<br />
45 : FIELDBUS Commande “Fieldbus” SETP.ANALOG<br />
SETP. BUS<br />
SETP. ANALOG<br />
46 : RELEASE Version du logiciel V XX<br />
(XX = deux chiffres)<br />
Le positionneur doit être de nouveau initialisé après avoir été réglé sur "Default".<br />
Tous les paramètres précédents de l’actionneur sont supprimés (état initial).<br />
11: X-DIRECTION<br />
Direction de la variable de positionnement.<br />
Réglage de la direction de l’action (montée ou descente) affichage et rétroaction de position.<br />
ALIMENTATION EN AIR X-DIRECTION Position x de rétroaction<br />
Chambre A1 assignée<br />
Echappement d‘air MONTEE 0 %<br />
Air sous pression 100 %<br />
Echappement d‘air DESCENTE 100 %<br />
Air sous pression 0 %<br />
12: ALARM FUNCTN<br />
Active ou désactive la fonction d’alarme.<br />
Le seuil de réponse des alarmes (contacts de tolérances) dépend de l’échelle POSITION (course mécanique).<br />
x = valeur réelle de rétroaction.<br />
13
<strong>POSIMATIC</strong> INSTALLATION<br />
min/max:<br />
Position Etat de la sortie numérique A1 Etat de la sortie numérique A2<br />
x < Niveau alarme 1 < Niveau alarme 2 24V 0V<br />
Niveau alarme 1 < x < Niveau alarme 2 0V 0V<br />
Niveau alarme 1 < Niveau alarme 2 < x 0V 24V<br />
min/min:<br />
Position Etat de la sortie numérique A1 Etat de la sortie numérique A2<br />
x < Niveau alarme 1 < Niveau alarme 2 24V 24V<br />
Niveau alarme 1 < x < Niveau alarme 2 0V 24V<br />
Niveau alarme 1 < Niveau alarme 2 < x 0V 0V<br />
max/max:<br />
Position Etat de la sortie numérique A1 Etat de la sortie numérique A2<br />
x < Niveau alarme 1 < Niveau alarme 2 0V 0V<br />
Niveau alarme 1 < x < Niveau alarme 2 24V 0V<br />
Niveau alarme 1 < Niveau alarme 2 < x 24V 24V<br />
13 : LEVEL ALARM 1<br />
Seuil de réponse pour Alarm 1.<br />
L’état de la sortie numérique A1 (sortie 24V continu) bascule dès que le seuil de réponse est atteint.<br />
14 : LEVEL ALARM 2<br />
Seuil de réponse pour Alarm 2.<br />
L’état de la sortie numérique A2 (sortie 24V continu) bascule dès que le seuil de réponse est atteint.<br />
15 : ERROR FUNCTN<br />
Fonction de la sortie erreur (sortie 24V continu) ERR<br />
ERROR : 16 : ERROR TIME et 17 : ERROR LEVEL dépassés.<br />
ERROR + INACTIVE : Surveillance des erreurs ou mode manuel.<br />
RANGE : Surveillance du signal d’entrée du point de consigne 4-20 mA ; sélection par 18: RANGE FUNCTN<br />
ERROR + RANGE : Surveillance d’erreur et de plage.<br />
ERR + RANGE + INAC : Activation de toutes les fonctions de surveillance des erreurs.<br />
16 : ERROR TIME<br />
Temps de surveillance pour valider les messages d’erreur.<br />
Cette valeur (en secondes) est paramétrée pour définir la période de temps pendant laquelle le positionneur doit être dans<br />
un état de repos. Le seuil de réponse correspondant est préréglé avec le paramètre 17.<br />
La sortie d’erreur ERR est donnée dès que la position est hors du seuil de réponse (niveau d’erreur) pendant une période<br />
plus longue que le temps de surveillance (temps d’erreur).<br />
Lorsqu’elle est réglée sur "Auto", cette période est de 10 fois le temps de réponse d’initialisation. Ceci est automatiquement<br />
calculé pendant l’initialisation.<br />
17 : ERROR LEVEL<br />
Seuil de réponse pour paramétrer la sortie d’erreur ERR.<br />
Spécification en pourcentage de la variable admissible de l’écart pour déclencher un message d’erreur.<br />
Lorsqu’il est réglé sur "Auto", le seuil de réponse est égal à la plage des faibles vitesses.<br />
La plage des faibles vitesses est automatiquement calculée pendant l’initialisation.<br />
18 : RANGE FUNCTN<br />
La surveillance de la plage du signal du point de consigne.<br />
Spécification du fait qu’un signal RANGE doit être déclenché ou non, si 4 mA n’est pas atteint (surveillance de la rupture du<br />
câble) ou si 20 mA est dépassé (surveillance de court-circuit).<br />
21 : MIN POSITION<br />
Début de limitation de la variable de positionnement (YA).<br />
Cette fonction correspond à une limitation mécanique du mouvement de fermeture.<br />
Voir la figure 6 : Limitation du mouvement de relevage/fermeture.<br />
La distance minimum entre MIN POSITION et MAX POSITION est de 10%.<br />
14
INSTALLATION <strong>POSIMATIC</strong><br />
22 : MAX POSITION<br />
Fin de limitation de la variable de positionnement (YE).<br />
Cette fonction correspond à une limitation mécanique du mouvement de relevage.<br />
i<br />
Les paramètres 21 et 22 limitent la course mécanique (de butée à butée) aux valeurs prédéterminées.<br />
La plage mécanique de l’actionneur par rapport au débit effectif peut ainsi être limitée.<br />
Course physique x (%)<br />
Position<br />
Fig. 6 : Limitation du mouvement de relevage et de fermeture<br />
23 : CLOSE TIGHT<br />
Fermeture complète de la variable de positionnement.<br />
Cette fonction permet de piloter la vanne à la vitesse maximum de l’actionneur dans son siège. La fonction de fermeture<br />
complète peut être activée pour une ou pour les deux positions de butée. CLOSE TIGHT est effectif dès que le point de<br />
consigne est à 0,5% au-dessus de la MIN POSITION ou à 0,5% au-dessous de la MAX POSITION.<br />
Du fait que la plage du point de consigne est paramétrée entre 0% et 100% par 21 et 22, le seuil d’activation de la fonction<br />
de fermeture complète par rapport au débit peut être en plus ajusté vers le bas avec 21 et vers le haut avec 22.<br />
Course x (%)<br />
Course non-limitée<br />
Course limitée<br />
Course limitée x (%)<br />
Débit<br />
Point de consigne w (%)<br />
Point de consigne w (%)<br />
Fig. 7 : Fonction de fermeture complète<br />
24 : SETP DIRECTN<br />
Direction du point de consigne.<br />
Le paramétrage de la direction du point de consigne spécifie la direction de l’action du point de consigne. Il est principalement<br />
requis pour le mode de partage de plage et pour les actionneurs à simple effet avec position de sécurité "OPEN" ("control<br />
function 2").<br />
Course physique x (%)<br />
Descente<br />
Montée<br />
Point de consigne w (%)<br />
Fig. 8 : Direction du point de consigne<br />
15
<strong>POSIMATIC</strong> INSTALLATION<br />
25 : SETP RAMP<br />
Rampe du point de consigne.<br />
La rampe du point de consigne est activée en mode manuel et automatique. Elle limite la vitesse de l’actionneur dans le cas<br />
d’une rapide variation du point de consigne.<br />
Pour le réglage de SETP RAMPE = auto, le plus lent des deux temps de positionnement calculés pendant l’initialisation est<br />
utilisé comme rampe de point de consigne.<br />
26 : SPLIT START<br />
Point de consigne pour le début de la plage partagée (Fig. 9 : Fonctionnement en plage partagée)<br />
27 : SPLIT END<br />
Point de consigne pour la fin de la plage partagée.<br />
Les paramètres 26 et 27 ainsi que le paramètre 24 limitent la plage effective de point de consigne. C’est une solution pour<br />
des applications en plage partagée avec les courbes caractéristiques :<br />
❑ montée / descente<br />
❑ descente / montée<br />
❑ descente / descente<br />
❑ montée / montée<br />
courbes caractéristiques.<br />
16<br />
Course x (%)<br />
Fig. 9: Fonctionnement en plage partagée (exemple)<br />
28 : SETP FUNCTN<br />
Fonction point de consigne (Fig. 10 : Courbes de vanne caractéristiques).<br />
Cette fonction permet la linéarisation des courbes caractéristiques non linéaires des vannes et de tracer des caractéristiques<br />
de débit arbitraires de courbes caractéristiques linéaires de vannes.<br />
Le dispositif est fourni avec quatre courbes caractéristiques :<br />
❑ linéaire<br />
❑ pourcentage égal 1 : 25<br />
❑ pourcentage égal 1 : 50<br />
❑ libre (réglage usine : 1 : 25 inverse)<br />
Plage du point de<br />
Plage du point de<br />
consigne<br />
consigne<br />
Positionneur 1 :<br />
Positionneur 2 :<br />
montée steigend montée steigend<br />
Une courbe avec 11 points peut être entrée à 30 : lorsque "free" (libre) est choisi.<br />
30 : FREE 0%<br />
.<br />
.<br />
.<br />
40 : FREE 100%<br />
Point de consigne w (%)
INSTALLATION <strong>POSIMATIC</strong><br />
Une valeur de débit peut être affectée à chaque point de consigne avec des intervalles de 10%. Ces points créent un<br />
polygone composé de 10 segments de droites ayant pour résultat une image de la courbe caractéristique de la vanne.<br />
i<br />
Les points de consignes peuvent uniquement être entrés en 28 : SETP FUNCTN = free.<br />
Fig. 10 : Courbes de vanne caractéristiques<br />
41 : X-DISPLAY<br />
Étalonnage de la variable de positionnement.<br />
Limitation la variable de positionnement par l’intermédiaire de 21 : MIN POSITION (YA) et 22 : MAX POSITION qui crée<br />
deux échelles différentes pour l’affichage et la rétroaction de position [POSITION ou FLOW (POSITION ou DÉBIT)].<br />
POSITION est la position mécanique (0 à 100%) entre les butées mécaniques prises en compte à l’initialisation et n’est pas<br />
influencée par YA ou YE.<br />
FLOW (DÉBIT) est l’étalonnage de l’affichage (0 à 100%) dans la plage entre YA et YE et suivant la courbe caractéristique<br />
de la vanne choisie avec 28 : SETP FUNCTN. Le point de consigne (0 à 100%) est alors associé à cette plage de FLOW<br />
(DÉBIT) (0 à 100%).<br />
X-DISPLAY peut être modifié pour référencer l’affichage et la rétroaction de position (x) au débit (également si des courbes<br />
caractéristiques des vannes sont utilisées).<br />
Dans ce cas, YE, YA et la courbe caractéristique de la vanne sont pris en considération.<br />
42 : DEADBAND<br />
Zone morte du positionneur.<br />
La zone morte spécifie l’écart maximal permis entre la valeur de rétroaction et le point de consigne.<br />
Si DEADBAND = auto, la zone morte est paramétrée sur les exigences de la boucle d’avertissement à l’initialisation. La<br />
valeur préréglée fixée de la zone morte est utilisée pour tous les autres réglages discrets.<br />
!<br />
Courbe x (%)<br />
LIBRE (réglage usine)<br />
1:25 inverse<br />
linéaire<br />
Point de consigne w (%)<br />
Des déplacements saccadés ou incontrôlés de la vanne (pompage) peuvent se produire si la valeur<br />
du réglage pour DEADBAND est trop petite.<br />
17
<strong>POSIMATIC</strong> INSTALLATION<br />
43 : PROP GAIN<br />
Gain proportionnel.<br />
Réglage du gain proportionnel Kp<br />
PROP GAIN = 10 % ... 1000 % correspond à Kp = 0,1 ... 10<br />
Réglage usine : PROP GAIN = 100 % correspond à Kp = 1<br />
44 : DERIV TIME<br />
Temps de pré-action.<br />
Réglage du temps de pré-action Tv (période de temps dans laquelle une variable de positionnement définie est atteinte plus<br />
rapidement qu’avec un contrôleur P en raison du composant D).<br />
DERIV TIME = 10 % ... 1000 % correspond à Tv = 0,01 s ... 1s.<br />
Réglage usine : DERIV TIME = 100 % correspond à Tv = 0,1 s.<br />
45 : FIELD BUS<br />
Sélection de l’entrée du point de consigne<br />
❑ Analogique<br />
❑ Fieldbus (option future)<br />
46 : RELEASE<br />
Version courante du logiciel VXX<br />
11. Messages d‘erreur<br />
18<br />
!<br />
PRESS ←<br />
ERROR RUN 1<br />
PRESS ←<br />
ERROR RUN 2.1<br />
PRESS ←<br />
ERROR RUN 2.2<br />
ADJUST NOZZLE(S)<br />
La modification des réglages de 43/44 peut avoir comme conséquence une recherche incontrôlée de<br />
la vanne.<br />
Affichage Cause possible Dépannage<br />
La direction de l’action de l’actionneur ne<br />
peut pas être déterminée.<br />
Raison :<br />
a) Pas d’alimentation en air.<br />
b) Mauvaise connexion du capteur de<br />
position.<br />
Réglage à zéro impossible.<br />
Raison :<br />
a) Capteur de position défectueux.<br />
b) Mauvais capteur de position (course<br />
mécanique qui ne correspond pas au<br />
déplacement électrique du capteur de<br />
position).<br />
Réglage de la course impossible.<br />
Fieldbus:<br />
a) Capteur de position défectueux.<br />
b) Mauvais capteur de position.<br />
c) Mauvaise connexion au capteur de<br />
position (course mécanique qui ne<br />
correspond pas au déplacement<br />
électrique du capteur de position).<br />
Temps de positionnement de la vanne<br />
inférieur à 1 seconde.<br />
Raccordez l’alimentation en pression et vérifiez<br />
le raccordement pneumatique de l’actionneur.<br />
Vérifiez le raccordement correct des bornes à<br />
l’aide du plan d’affectation (voir fig. 3).<br />
Pilotez la vanne à la main.<br />
La valeur de l’affichage x doit changer.<br />
La valeur de l’affichage doit être > 2 % en<br />
position CLOSE.<br />
Pilotez la vanne à la main.<br />
La valeur de l’affichage x doit changer.<br />
La valeur de l’affichage doit être < 98 % en<br />
position OPEN.<br />
Vérifiez le raccordement correct des bornes à<br />
l’aide du plan d’affectation (voir fig. 3).<br />
Réglez le limiteur de débit D1 (actionneurs à<br />
simple effet) et/ou les limiteurs de débit D1 et<br />
D2 (actionneurs à double effet).<br />
Tournez dans le sens horaire pour un temps de<br />
positionnement plus long.
INSTALLATION <strong>POSIMATIC</strong><br />
12. Caractéristiques techniques<br />
Général<br />
Protection à EN 60529 IP 65<br />
Dimensions L x H x P 160 x 90 x 84 mm<br />
Masse 1,6 kg<br />
Position de montage toutes<br />
Directive UE/IEM 89/336/EEC<br />
Directive basse tension UE 73/23/EEC<br />
Emission EN 50081-2<br />
Immunité EN 50082-2<br />
Sécurité intrinsèque En cas de coupure de<br />
(simple effet) l’alimentation électrique ou<br />
pneumatique, la vanne est<br />
mise en position sécurité par<br />
action du ressort de rappel et<br />
de l’échappement.<br />
Caractéristiques électriques<br />
- Alimentation<br />
Alimentation 24 V continu ± 10%<br />
Consommation ≤ 7,2 W (en fonctionnement)<br />
≤ 2,4 W (au repos)<br />
Précision des courbes<br />
caractéristiques ≤ 1 %<br />
- Signaux Entrée/Sortie<br />
Signaux d’entrée a) 0-10V; b) 0/4...20 mA<br />
Résistance d’entrée a) 200 kΩ ; b) 250 Ω<br />
Rétroaction de position 0-10 V ; 4...20 mA (optionnel)<br />
Sorties binaires 2 sorties d’alarmes<br />
1 sortie d’erreur<br />
Module Fieldbus (optionnel) Profibus-DP, Interbus<br />
(produit futur)<br />
Connexion électrique<br />
Alimentation Entrée de câble M16<br />
Signal d’entrée Entrée de câble M16<br />
Conditions de fonctionnement<br />
Température ambiante 0...60°C<br />
Température de stokage 0...60°C<br />
Fluide de commande Air ou gaz neutre, filtré à<br />
50 µm, lubrifié ou non<br />
Plage de pression 0 - 6 bars<br />
Débits d’air 35 ou 70 Nl/min. en fonction<br />
du type<br />
Consommation d’air<br />
(au repos) 0 Nl/min<br />
Caractéristiques fonctionnelles<br />
Fonction de commande 1. Ressort en position rétracté<br />
2. Ressort en position détendu<br />
3. Double effet<br />
Exploitation - Démarrage/réglage<br />
automatique<br />
- Automatique<br />
- Manuel<br />
Paramétres réglable<br />
(voir liste des paramétres<br />
p. 5/6)<br />
Matériaux<br />
Corps Aluminium, traité<br />
Protection afficheur PMMA<br />
Protection touches<br />
Système de mesure<br />
PMMA<br />
de déplacement Alu, anodisé<br />
PEEK } version linéaire<br />
PAI<br />
NBR<br />
version rotative<br />
Système de mesure de déplacement<br />
Version Linéaire (potentiomètre)<br />
Montage séparé (externe)<br />
Course 0-30, 0-50, 0-75 mm<br />
Raccordement câble pré-assemblé<br />
Version Rotative (potentiomètre)<br />
Montage séparé (externe)<br />
Angle de pivotement 0-100°<br />
Raccordement câble pré-assemblé<br />
}<br />
19
<strong>POSIMATIC</strong> INSTALLATION<br />
13. Options de montage sur actionneurs differents des versions séries 290 / 390<br />
(nous consulter)<br />
20<br />
Montage d‘actionneurs linéaires<br />
Séparé (externe) Support NAMUR<br />
Montage d‘actionneurs rotatifs<br />
Séparé (externe) Adaptateur V NAMUR Adaptateur H NAMUR
INSTALLATION <strong>POSIMATIC</strong><br />
14. Dimensions<br />
Vue de face Vue arrière<br />
Vue de côté (de la gauche) Vue de côté (de la droite)<br />
Vue de côté (de dessous) Vue de côté (de dessus)<br />
Légende<br />
A1 : Sortie pneumatique A1 (accès sur les actionneurs à simple effet)<br />
A2 : Sortie pneumatique A2 (accès sur les actionneurs à double effet)<br />
P : Alimentation en air<br />
R : Echappement<br />
D1 : Limiteur de débit D1 → agit sur A1<br />
D2 : Limiteur de débit D2 → agit sur A2<br />
RV : Clapet anti-retour<br />
PE<br />
21
<strong>POSIMATIC</strong> INSTALLATION<br />
A<br />
A1 (sortie pneumatique) .................................................. 6<br />
A2 (sortie pneumatique) .................................................. 6<br />
Affection des bornes ....................................................... 7<br />
ALARM FUNCTN ..................................................... 12, 13<br />
Assemblage mécanique .................................................. 5<br />
AUTO ............................................................................. 9<br />
C<br />
Caractéristique de débit .................................................16<br />
Caractéristiques techniques ...........................................19<br />
Clapet de non-retour .......................................................21<br />
Commande de plage ......................................................14<br />
CONFIG .................................................................... 9, 10<br />
Configuration ..................................................................10<br />
Contact de tolérances ....................................................13<br />
Courbe caractéristique<br />
Pourcentage égal ......................................................17<br />
Librement programmable ...........................................17<br />
Linéaire .....................................................................17<br />
Courbes de vanne caractéristiques ................................17<br />
D<br />
D1 (étrangleur de débit 1) .......................................... 9, 21<br />
D2 (étrangleur de débit 2) .......................................... 9, 21<br />
DEADBAND .............................................................13, 17<br />
DEFAULT STATE ................................................8, 12, 13<br />
DERIV TIME ............................................................13, 18<br />
Description des paramètres............................................13<br />
Description des symboles ............................................... 3<br />
Dimensions ....................................................................21<br />
Direction d’action ...........................................................15<br />
Direction de la variable de positionnement .....................13<br />
Direction du point de consigne .......................................15<br />
E<br />
Echappement (R) ...........................................................21<br />
ERROR FUNCTN ..................................................... 12, 14<br />
ERROR LEVEL ........................................................ 12, 14<br />
ERROR TIME ..........................................................12, 14<br />
Etalonnage de la variable de positionnement..................17<br />
F<br />
Fermeture complète de la variable de positionnement ....15<br />
FIELDBUS .....................................................................13<br />
FIELDBUS .....................................................................18<br />
FLOW ............................................................................17<br />
Fonction “Close tight” ............................................... 12, 15<br />
Fonction du point de consigne........................................16<br />
FREE .............................................................................12<br />
G<br />
Gain proportionnel Kp .....................................................18<br />
22<br />
Index<br />
I<br />
INIT ALL ..............................................................9, 12, 13<br />
Initialisation..................................................................... 8<br />
Initialisation d’un RUN ..................................................... 9<br />
Instruction de fonctionnement générales ......................... 7<br />
Intégration des options ...................................................11<br />
K<br />
Kit de montage................................................................ 5<br />
L<br />
LEVEL ALARM 1 ...........................................................12<br />
LEVEL ALARM 1 ...........................................................14<br />
LEVEL ALARM 2 ...........................................................12<br />
LEVEL ALARM 2 ...........................................................14<br />
Limitation de course .......................................................14<br />
Limitation de variable de postionnement.........................14<br />
Limitation de vitesse de fermeture .................................14<br />
Limiteur de débit, intégré ................................................. 9<br />
Linéarisation ...................................................................17<br />
Liste des paramètres ............................................... 12, 13<br />
Livraison ......................................................................... 4<br />
M<br />
MANUAL ................................................................... 9, 10<br />
MAX POSITION ......................................................12, 15<br />
Messages d’erreur .........................................................18<br />
MIN POSITION ........................................................ 12, 14<br />
Mise en route .................................................................. 8<br />
Mode automatique .........................................................10<br />
Mode de fonctionnement ................................................10<br />
Mode manuel .................................................................10<br />
Module enfichable ..........................................................11<br />
Montage du positionneur sur un actionneur linéaire ......... 5<br />
Montage du positionneur sur un actionneur rotatif ........... 5<br />
N<br />
NO INIT .......................................................................... 8<br />
O<br />
Options de montage .......................................................22<br />
P<br />
P (alimentation en air) ..................................................... 6<br />
Plage partagée ...............................................................16<br />
POSITION .....................................................................17<br />
Processus d’initialisation................................................. 9<br />
PROP GAIN.............................................................13, 18
INSTALLATION <strong>POSIMATIC</strong><br />
R<br />
R (échappement) ............................................................21<br />
Raccordements électriques ............................................. 7<br />
Raccordements pneumatiques ........................................ 6<br />
RANGE FUNCTN .....................................................12, 14<br />
Réglage manuel .............................................................. 9<br />
Réglage usine ................................................................10<br />
Réglage usine, avec ... ................................................... 8<br />
Rétroaction de position, analogique ................................11<br />
Run (initialisation)............................................................ 9<br />
RV (clapet de non-retour) ...............................................21<br />
S<br />
Sécurité .......................................................................... 4<br />
SETP DIRECTN ......................................................12, 15<br />
SETP FUNCTN ........................................................12, 16<br />
SETP RAMP............................................................12, 16<br />
SETPOINT ..........................................................9, 12, 13<br />
Seuil de réponse ............................................................14<br />
Signal INACTIVE ...........................................................14<br />
SOFT RELEASE .....................................................13, 18<br />
Sortie erreur ...................................................................14<br />
Spécification du fabricant ................................................ 4<br />
SPLIT END ..............................................................12, 16<br />
SPLIT START ..........................................................12, 16<br />
Stockage ........................................................................ 3<br />
Surveillance des écarts ..................................................14<br />
Symbols ......................................................................... 3<br />
T<br />
Temps de positionnement à l’initialisation ....................... 9<br />
Temps de pré-action Tv .................................................18<br />
Temps de surveillance ...................................................14<br />
Transport ........................................................................ 3<br />
V<br />
Version du logiciel ..........................................................18<br />
X<br />
X-DIRECTION .......................................................... 12, 13<br />
X-DISPLAY .............................................................. 13, 17<br />
Déclaration du constructeur<br />
en accord avec la Directive pour les machines de l‘UE 89/392/EEC Annex II B<br />
Nous affirmons par la présente que le dispositif décrit dans ce manuel d’installation est prévu pour être intégré dans ou<br />
monté sur d’autres machines et qu’il ne doit pas être mis en service avant que les machines auxquelles il doit être incorporé<br />
n’aient été déclarées conformes aux dispositions de la Directive de l’UE 89/392/EWG. La manipulation, l’assemblage et la<br />
mise en service, et tous les paramétrages et réglages doivent être effectués uniquement par un personnel qualifié autorisé.<br />
Ce produit est conforme aux exigences essentielles de la Directive 89/336/CEE sur la Compatibilité Electromagnétique,<br />
et amendements. Il est certifié CE. Une déclaration de conformité peut être fournie sur<br />
simple demande.<br />
Conformément à la directive CEE 89/392/CEE Annexe II B, une Déclaration d'incorporation peut être fournie<br />
sur demande. Veuillez nous indiquer le numéro d'accusé de réception (AR) et les références ou codes des<br />
produits concernés.<br />
23