Cerceau roulant sans glisser sur un plan
Cerceau roulant sans glisser sur un plan
Cerceau roulant sans glisser sur un plan

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
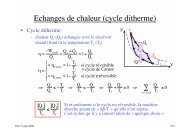
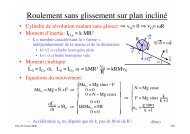
<strong>Cerceau</strong> <strong>roulant</strong> <strong>sans</strong> <strong>glisser</strong> <strong>sur</strong> <strong>un</strong> <strong>plan</strong><br />
• <strong>Cerceau</strong> vertical de rayon R se déplaçant<br />
<strong>sans</strong> <strong>glisser</strong> <strong>sur</strong> <strong>un</strong> <strong>plan</strong> horizontal<br />
• 4 coordonnées généralisées: x, y, et <br />
• Ces coordonnées ne sont pas indépendantes,<br />
il existe des relations entre leurs variations:<br />
v= x ˙<br />
2 + y ˙<br />
2 =R˙ <br />
˙ x = v cos =R˙ cos<br />
<br />
y ˙ = v sin =R˙ sin<br />
<br />
dx = R cos d<br />
<br />
dy = R sin d<br />
• Ces relations ne sont pas intégrables<br />
on ne peut pas exprimer <strong>un</strong>e des coordonnées comme <strong>un</strong>e fonction des autres<br />
on ne peut donc pas éliminer <strong>un</strong>e des coordonnées<br />
ce système n’est pas holonome !<br />
• Il y a au minimum 4 coordonnées, mais seulement 2 degrés de liberté:<br />
– pivotement: variation de pour x, y, et constants<br />
– roulement: variation de x, y, ou (entraînant nécessairement <strong>un</strong>e variation des deux<br />
autres coordonnées) pour constant<br />
OS, 27 avril 2006 277<br />
O<br />
y<br />
x<br />
y<br />
démo: roue de vélo<br />
<br />
R<br />
<br />
x
Au tableau<br />
• Vitesses:<br />
Dérivation des équations de Lagrange<br />
r<br />
v = dr r <br />
dt =<br />
• Energie cinétique<br />
totale du système:<br />
d<br />
dt<br />
<br />
r <br />
q i=1 i<br />
• Si tous les q i indépendants<br />
(système holonome)<br />
n<br />
<br />
T=<br />
N<br />
<br />
=1<br />
<br />
q ˙ i +<br />
r <br />
t<br />
1<br />
2 m r 2<br />
v<br />
<br />
r<br />
<br />
˙<br />
OS, 27 avril 2006 278<br />
v <br />
q i<br />
T<br />
˙<br />
q i<br />
= r r <br />
qi T r<br />
= ma <br />
˙ <br />
r r + r<br />
v r<br />
N<br />
<br />
v r<br />
<br />
= ma <br />
<br />
<br />
r<br />
N<br />
r + T<br />
q i<br />
=1<br />
q i<br />
q i<br />
=1<br />
N<br />
r<br />
= mv r v r<br />
= mv <br />
˙ q i<br />
r r qi d T<br />
<br />
dt ˙ q i<br />
T<br />
n<br />
<br />
r<br />
qi = ma <br />
qi <br />
i=1<br />
r<br />
n N<br />
r <br />
<br />
r<br />
<br />
q<br />
qi = ma <br />
i=1 =1<br />
i<br />
r<br />
N<br />
r <br />
=1<br />
d T<br />
<br />
dt ˙ q i<br />
T<br />
n<br />
<br />
r<br />
Qi qi = ma <br />
qi <br />
i=1<br />
r<br />
N<br />
n<br />
r<br />
r Qiq i = ma <br />
=1<br />
i=1<br />
r<br />
N<br />
r <br />
=1<br />
r<br />
= ma r<br />
( F )<br />
r<br />
N<br />
r = 0 (d'Alembert)<br />
=1<br />
=1<br />
q i<br />
q i<br />
d T<br />
<br />
dt ˙ q i<br />
T<br />
Qi = 0 , i<br />
qi Equations de Lagrange<br />
Note <strong>sur</strong> les déplacements<br />
réels d r et virtuels r :<br />
dr r = r r /t =0<br />
N<br />
=1<br />
N<br />
<br />
=1<br />
r<br />
F r
Equations de Lagrange (1788)<br />
• Pour <strong>un</strong> système holonome à n degrés de liberté:<br />
d<br />
dt<br />
où<br />
T<br />
˙<br />
q i<br />
T<br />
q i<br />
Q i = 0 , pour i =1, ..., n<br />
<br />
T = énergie cinétique totale du système<br />
qi = coordonée généralisée<br />
Qi = force généralisée associée à la coordonée qi • Si les forces dérivent d’<strong>un</strong> potentiel V tel que:<br />
Q i = d<br />
dt<br />
d<br />
dt<br />
L<br />
˙<br />
q i<br />
V<br />
˙<br />
q i<br />
V<br />
q i<br />
L<br />
q i<br />
équations de Lagrange de 1ère espèce<br />
= 0 , pour i =1, ..., n<br />
où L = L(qi, q ˙ i,t) = T V = lagrangien du système<br />
= fonction des coordonnées qi et des vitesses q ˙ i généralisées<br />
Joseph Louis Lagrange<br />
1736–1813<br />
par exemple Q <br />
i = <br />
V<br />
dans le cas conservatif<br />
<br />
qi avec énergie potentielle indépendante des vitesses<br />
équations de Lagrange<br />
de 2ème espèce<br />
OS, 27 avril 2006 279
Ressort entre deux pendules<br />
• Deux pendules identiques de longueur r<br />
reliés par <strong>un</strong> ressort horizontal de constante k:<br />
– longueur du ressort au repos = distance entre les<br />
points d’attache des deux pendules<br />
– seulement petites oscillations: 1 , 2
Ressort entre deux pendules (2)<br />
˙ x ˙ 1 <br />
˙ x ˙ 2<br />
– on doit donc résoudre<br />
x1 = <br />
<br />
<br />
1 4 4 2 4 4 3<br />
x2 matrice M<br />
<br />
avec =<br />
<br />
k g<br />
et =<br />
m r<br />
x1 <br />
x2 <br />
=<br />
<br />
a 1 <br />
a2 <br />
exp( it)<br />
1 4 4 2<br />
<br />
4 4 4 3<br />
ansatz<br />
2 <br />
2 <br />
<br />
<br />
<br />
<br />
<br />
a 1 <br />
a2 <br />
=<br />
<br />
0 <br />
<br />
0<br />
<br />
det<br />
<br />
2 <br />
2 <br />
<br />
<br />
<br />
=0<br />
<br />
<br />
2 a1 <br />
a2 <br />
=M<br />
<br />
a 1 <br />
a2 <br />
<br />
<br />
le vecteur a 1 <br />
a2 <br />
est vecteur propre de<br />
<br />
la matrice M pour la valeur propre 2<br />
<br />
<br />
<br />
<br />
• Sous forme matricielle:<br />
• On cherche des solutions où les deux pendules<br />
oscillent avec la même pulsation :<br />
( ) 2<br />
2 <br />
( ) 2 ( )<br />
=0<br />
2 =0 2 +<br />
– solutions du problème aux valeurs propres:<br />
2<br />
1 = 1 = ± g<br />
r a 1 <br />
a2 <br />
<br />
<br />
1 <br />
<br />
1<br />
<br />
<br />
<br />
2<br />
2 = +2 2 = ± g<br />
+<br />
2k<br />
r m a 1 <br />
<br />
<br />
<br />
<br />
1 <br />
<br />
1<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
OS, 27 avril 2006 281<br />
a 2<br />
Note: les 2 vecteurs<br />
propres sont<br />
orthogonaux<br />
(dû à la symétrie<br />
de la matrice M)
démo: pendules couplés, autres systèmes avec deux modes propres<br />
Ressort entre deux pendules (3)<br />
• Le système a deux modes propres d’oscillations:<br />
– les deux masses oscillent en phase avec <strong>un</strong>e pulsation 1<br />
– les deux masses oscillent en opposition de phase avec pulsation 2<br />
• Solution générale = superposition des deux modes:<br />
x1 <br />
x2 ou bien<br />
<br />
=A 1<br />
1<br />
1<br />
<br />
<br />
<br />
exp +i<br />
1<br />
(<br />
<br />
1t)+B<br />
1<br />
1<br />
<br />
<br />
<br />
exp i<br />
1<br />
(<br />
<br />
1t)+A<br />
2<br />
1<br />
<br />
exp +i<br />
<br />
2t<br />
x1 <br />
<br />
<br />
=C 1<br />
1<br />
1<br />
<br />
<br />
<br />
cos <br />
1<br />
(<br />
1t+D1)+C 2<br />
1<br />
<br />
cos( <br />
2t+D2) x 2<br />
( )+B 2<br />
• Constantes déterminées par les conditions initiales:<br />
•<br />
– le système oscillera en mode propre<br />
si et seulement si les conditions initiales<br />
correspondent à des vecteurs propres:<br />
Note:<br />
<br />
<br />
<br />
<br />
<br />
<br />
1<br />
1<br />
<br />
exp i<br />
<br />
2t<br />
– <strong>un</strong> choix plus judicieux pour les deux coordonnées généralisées aurait pu<br />
donner lieu à des équations différentielles découplées, donc plus simples !<br />
<br />
˙ ( ) = coord. du centre de masse<br />
( )<br />
x1 (0) = x2 (0) et x ˙ 1 (0) = x ˙ 2 (0)<br />
ou bien<br />
x1(0) = x2(0) et x ˙ 1(0) = ˙ x 2(0)<br />
X=<br />
OS, 27 avril 2006 282<br />
1<br />
2 x1 +x 2<br />
2<br />
X +1 X=0<br />
<br />
2<br />
x=x1 x2 = coordonée relative<br />
<br />
˙ x ˙ + 2x=0