Joustavasti tuettu tasopalkkielementti - Rakenteiden mekaniikan seura
Joustavasti tuettu tasopalkkielementti - Rakenteiden mekaniikan seura
Joustavasti tuettu tasopalkkielementti - Rakenteiden mekaniikan seura

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
JOUSTAVASTI TUETTU TASOPALKKIELEMENTTI<br />
Jussi Jalkanen <strong>Rakenteiden</strong> Mekaniikka, Vol. 37<br />
No. 1, 2004, ss. 22-35<br />
TIIVISTELMÄ<br />
Tässä esityksessä tarkastellaan <strong>tasopalkkielementti</strong>ä, jolla voidaan mallintaa liitoksiltaan<br />
joustavia kehiä. Liitoksen jousto ajatellaan johtuvan liitoksessa vaikuttavasta taivutusmomentista,<br />
ja ilmiö on mallinnettu käyttämällä lineaarisia rotaatiojousia elementin<br />
päissä. Aluksi johdetaan käsitellyn elementin muotofunktiot ja sitten näiden avulla<br />
jäykkyysmatriisi, konsistentti massamatriisi ja geometrinen jäykkyysmatriisi. Matriiseille<br />
saadaan melko yksinkertaiset laskentakaavat. Lopussa käsiteltyä menetelmää on<br />
havainnollistettu laskuesimerkillä.<br />
JOHDANTO<br />
Kehärakenteita analysoitaessa oletetaan yleensä laskennan yksinkertaistamiseksi, että<br />
rakenteen liitokset ovat joko täysin jäykkiä tai toimivat kuten nivelet. Todellisuudessa<br />
liitosten käyttäytyminen on kuitenkin näiden kahden harvoin puhtaasti esiintyvän<br />
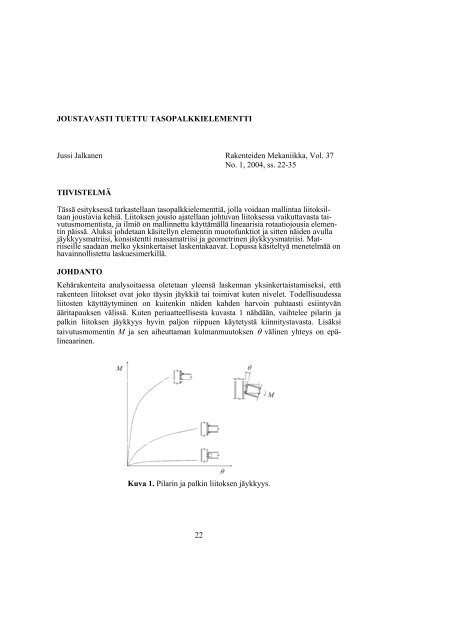
ääritapauksen välissä. Kuten periaatteellisesta kuvasta 1 nähdään, vaihtelee pilarin ja<br />
palkin liitoksen jäykkyys hyvin paljon riippuen käytetystä kiinnitystavasta. Lisäksi<br />
taivutusmomentin M ja sen aiheuttaman kulmanmuutoksen θ välinen yhteys on epälineaarinen.<br />
Kuva 1. Pilarin ja palkin liitoksen jäykkyys.<br />
22
Tämän työn ideana on tarkastella <strong>tasopalkkielementti</strong>ä, joka huomioi palkin kiinnityksen<br />
joustamisen kiinnityksen kohdalla vaikuttavan taivutusmomentin johdosta. Palkin<br />
pään tuenta on mallinnettu lineaarisella rotaatiojousella, jonka jäykkyys k tunnetaan.<br />
Mikäli k = 0 , käyttäytyy liitos kuten nivel, ja mikäli k = ∞ , vastaa liitos täysin jäykkää<br />
kiinnitystä.<br />
Joustava tuenta voitaisiin periaatteessa mallintaa helposti myös erillisillä jousielementeillä.<br />
Tällöin laskentamallin vapausasteiden määrä kuitenkin kasvaa ja siten tuntemattomien<br />
solmusiirtymien ratkaiseminen tulee työläämmäksi. Johtamalla jäykkyys- ja<br />
massamatriisi sekä geometrinen jäykkyysmatriisi elementille, joka huomioi tuennan<br />
joustamisen, säilyy laskentamallin vapausasteiden lukumäärä entisellään.<br />
<strong>Joustavasti</strong> <strong>tuettu</strong>ja palkkeja koskevia artikkeleita löytyy kirjallisuudesta lukuisia.<br />
Näistä voidaan mainita esimerkiksi [1], [2], [3] ja [4]. Aihe tuntuu olevan edelleen aktiivisen<br />
tutkimuksen kohteena.<br />
MUOTOFUNKTIOT<br />
Tarkastellaan kuvan 2 mukaista molemmista päistään rotaatiojousella <strong>tuettu</strong>a neljän<br />
vapausasteen (v 1 , φ 1 , v 2 ja φ 2 ) <strong>tasopalkkielementti</strong>ä. Elementin päissä olevat jäykät<br />
palkin palat oletetaan äärettömän lyhyiksi ja niiden tarkoitus on vain helpottaa tilanteen<br />
hahmottamista. Mikäli kehän liitosten eksentrisyys halutaan huomioida, onnistuu tämä<br />
lähteessä [4] esitetyllä tavalla.<br />
x<br />
φ 2<br />
α θ<br />
v 2<br />
1<br />
2<br />
k 2<br />
k 1<br />
θ 1<br />
α 2<br />
φ 1<br />
v 1<br />
L<br />
Kuva 2. Molemmista päistään rotaatiojousilla <strong>tuettu</strong> tasopalkki.<br />
Lausutaan palkin taipuma v(x) solmusiirtymien v 1 , φ 1, v 2 ja φ 2 sekä vastaavien<br />
~ ~<br />
muotofunktioiden N ( ) , N ( ) , N ~<br />
( ) ja ~<br />
N ( ) avulla.<br />
1<br />
x<br />
2<br />
x<br />
3 x<br />
4<br />
x<br />
23
v<br />
( x)<br />
~<br />
= N ( x)<br />
v<br />
=<br />
1<br />
~ ~<br />
+ N ( x)<br />
φ + N ( x)<br />
v<br />
~<br />
+ N ( x)<br />
φ<br />
~ ~ ~ ~<br />
1 ~<br />
[ N ( x)<br />
N ( x)<br />
N ( x)<br />
N ( x)<br />
] ⎢ ⎥ = N q<br />
~<br />
1<br />
1<br />
2<br />
2<br />
1<br />
3<br />
3<br />
4<br />
2<br />
4<br />
⎡ v1<br />
⎤<br />
⎢ ⎥<br />
⎢φ<br />
⎥<br />
⎢v<br />
⎥<br />
2<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎣φ<br />
2 ⎦<br />
2<br />
(1)<br />
Jos kulmat θ<br />
1<br />
ja θ<br />
2<br />
sekä siirtymät v 1 ja v 2 tunnetaan, on taipuman lauseke muotoa<br />
v<br />
( x)<br />
= N ( x)<br />
v<br />
=<br />
1<br />
+ N<br />
( x)<br />
θ + N<br />
+ N<br />
⎡ v1<br />
⎤<br />
⎢<br />
θ<br />
⎥<br />
[ ] ⎢<br />
1<br />
N ( x)<br />
N ( x)<br />
N ( x)<br />
N ( x)<br />
⎥ = Nq<br />
1<br />
1<br />
2<br />
2<br />
1<br />
3<br />
3<br />
( x)<br />
v<br />
4<br />
2<br />
4<br />
( x)<br />
θ<br />
⎢ v ⎥<br />
2<br />
⎢ ⎥<br />
⎢⎣<br />
θ<br />
2 ⎥⎦<br />
missä N ( ) , N ( ) , N ( ) ja N ( ) ovat tutut Hermiten polynomit<br />
1 x<br />
2 x<br />
3<br />
x<br />
4 x<br />
2<br />
, (2)<br />
2<br />
x x<br />
N1(<br />
x)<br />
= 1−<br />
3 + 2<br />
2<br />
L L<br />
2 3<br />
x x<br />
N<br />
3<br />
( x)<br />
= 3 − 2<br />
2 3<br />
L L<br />
3<br />
3<br />
2<br />
x x<br />
N<br />
2<br />
( x)<br />
= x − 2 +<br />
L L<br />
2 3<br />
x x<br />
N<br />
4<br />
( x)<br />
= − +<br />
2<br />
L L<br />
3<br />
2<br />
. (3)<br />
Kuvan 2 perusteella nähdään yhteydet<br />
φ<br />
1<br />
= θ<br />
1<br />
+ α<br />
1<br />
ja φ<br />
2<br />
= θ<br />
2<br />
+ α<br />
2<br />
. (4)<br />
Kulmat α<br />
1<br />
ja α<br />
2<br />
ovat rotaatiojousista johtuvat kulmanmuutokset palkin päissä. Koska<br />
jouset oletettiin lineaarisiksi, voidaan kirjoittaa<br />
M<br />
1<br />
M<br />
2<br />
α<br />
1<br />
= ja α<br />
2<br />
= , (5)<br />
k<br />
k<br />
1<br />
2<br />
missä M 1 ja M 2 ovat momentit palkin päissä ja k 1 sekä k 2 jousien jäykkyydet.<br />
Huomioimalla (4) ja (5) saadaan taipuman lauseke (2) muotoon<br />
24
v<br />
( x) = [ N ( x)<br />
N ( x)<br />
N ( x)<br />
N ( x)<br />
]<br />
1<br />
= N q<br />
~<br />
( + p)<br />
2<br />
3<br />
4<br />
⎡ v1<br />
⎢ M<br />
⎢ φ<br />
1<br />
−<br />
⎢ k1<br />
⎢ v2<br />
⎢ M<br />
⎢φ2<br />
−<br />
⎣ k2<br />
1<br />
2<br />
⎤ ⎛ ⎡ 0<br />
⎥ ⎜ ⎡v1<br />
⎤ ⎢ M<br />
⎥ ⎜ ⎢ ⎥ ⎢−<br />
⎥ N<br />
⎜ ⎢<br />
φ<br />
1⎥<br />
k1<br />
= + ⎢<br />
⎥ ⎜ ⎢v<br />
⎥ ⎢ 0<br />
2<br />
⎥ ⎜ ⎢ ⎥ ⎢ M<br />
⎥ ⎜ ⎣φ<br />
⎦ −<br />
2<br />
⎝<br />
⎢<br />
⎦<br />
⎣ k2<br />
Taivutusmomentit M 1 ja M 2 kytkeytyvät taipuman v(x) kanssa lausekkeilla<br />
( ) M = EI v′<br />
( L)<br />
1<br />
2<br />
⎤⎞<br />
⎥⎟<br />
⎥<br />
⎟<br />
⎥⎟<br />
⎥<br />
⎟ (6)<br />
⎥⎟<br />
⎥<br />
⎟<br />
⎦⎠<br />
M 1 = −EI<br />
v′′<br />
0 ja 2<br />
′ . (7)<br />
Derivoimalla (6) saadaan<br />
( x) = N ′′( x)( q + p)<br />
v ′ ~<br />
(8)<br />
ja siten palkin päissä<br />
v′′<br />
v′′<br />
1<br />
2<br />
L<br />
1<br />
2<br />
L<br />
( 0) = [ − 6 − 4L<br />
6 − 2L]( q + p)<br />
( L) = [ 6 2L<br />
− 6 4L]( q + p)<br />
mistä edelleen momenteiksi M 1 ja M 2<br />
M<br />
M<br />
1<br />
2<br />
EI<br />
=<br />
2<br />
L<br />
EI<br />
=<br />
2<br />
L<br />
~<br />
~<br />
[ 6 4L<br />
− 6 2L]( q<br />
~<br />
+ p)<br />
[ 6 2L<br />
− 6 4L]( q<br />
~<br />
+ p)<br />
Sijoittamalla lausekkeesta (6) vektori<br />
termejä siirtelemällä päästään muotoon<br />
M<br />
M<br />
1<br />
2<br />
EI ⎛ M<br />
1L<br />
M<br />
2L<br />
⎞<br />
+ 4 2<br />
2<br />
L<br />
⎜ +<br />
k1<br />
k<br />
⎟<br />
⎝<br />
2 ⎠<br />
EI ⎛ M<br />
1L<br />
M<br />
2L<br />
⎞<br />
+ 2 4<br />
2<br />
L<br />
⎜ +<br />
k1<br />
k<br />
⎟<br />
⎝<br />
2 ⎠<br />
, (9)<br />
. (10)<br />
T<br />
⎡<br />
1<br />
2<br />
⎢ 0 M M ⎤<br />
− 0 − ⎥<br />
k1<br />
k<br />
2 ⎦<br />
p =<br />
kaavaan (10) ja<br />
⎣<br />
EI<br />
= [ 6 4L<br />
− 6 2L]<br />
q<br />
~<br />
2<br />
L<br />
. (11)<br />
EI<br />
= [ 6 2L<br />
− 6 4L]q<br />
~<br />
2<br />
L<br />
Otetaan käyttöön lyhennysmerkinnät<br />
EI<br />
EI<br />
γ<br />
1<br />
= ja γ<br />
2<br />
=<br />
Lk<br />
Lk<br />
(12)<br />
1<br />
2<br />
25
ja puetaan yhtälöt (11) matriisimuotoon, jolloin<br />
⎡1<br />
+ 4γ<br />
1<br />
⎢<br />
⎣ 2γ<br />
1<br />
2γ<br />
2 ⎤ ⎡M<br />
1+<br />
4γ<br />
⎥ ⎢<br />
2 ⎦ ⎣M<br />
1<br />
2<br />
⎤<br />
⎥<br />
⎦<br />
Yhtälöstä (13) ratkaisemalla saadaan<br />
⎡M<br />
⎢<br />
⎣M<br />
1<br />
2<br />
⎤<br />
⎥<br />
⎦<br />
=<br />
EI ⎡6<br />
2 ⎢<br />
L Δ ⎣6<br />
( 1+<br />
2γ<br />
)<br />
2<br />
( 1+<br />
2γ<br />
)<br />
1<br />
4L<br />
=<br />
EI ⎡6<br />
2 ⎢<br />
L ⎣6<br />
4L<br />
2L<br />
− 6<br />
− 6<br />
( 1+<br />
3γ<br />
) − 6( 1+<br />
2γ<br />
)<br />
2L<br />
2<br />
− 6<br />
missä lyhennysmerkintä Δ tarkoittaa lauseketta<br />
( 1+<br />
4γ<br />
1<br />
) ( 1+<br />
4γ<br />
2<br />
) − 4γ<br />
1γ<br />
2<br />
2<br />
⎡ v1<br />
⎤<br />
⎢ ⎥<br />
2L⎤<br />
⎢<br />
φ<br />
1<br />
⎥<br />
⎥ . (13)<br />
4L⎦<br />
⎢v<br />
⎥<br />
2<br />
⎢ ⎥<br />
⎢⎣<br />
φ<br />
2 ⎥⎦<br />
( 1+<br />
2γ<br />
) 4L<br />
( 1+<br />
3γ<br />
)<br />
1<br />
2L<br />
1<br />
⎤<br />
⎥<br />
⎦<br />
⎡ v1<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
φ<br />
1<br />
⎥ , (14)<br />
⎢v<br />
⎥<br />
2<br />
⎢ ⎥<br />
⎢⎣<br />
φ<br />
2 ⎥⎦<br />
Δ =<br />
. (15)<br />
Huomioimalla momenttien M 1 ja M 2 lausekkeet saadaan p nyt muotoon<br />
⎡ 0<br />
⎢ 6γ<br />
1<br />
⎢−<br />
1<br />
p = ⎢ L<br />
Δ ⎢ 0<br />
⎢ 6γ<br />
2<br />
⎢−<br />
⎣ L<br />
0<br />
1<br />
( 1 + 2γ<br />
) − 4γ<br />
( 1 + 3γ<br />
) ( 1 + 2γ<br />
)<br />
2<br />
0<br />
6γ<br />
6γ<br />
2<br />
( 1 + 2γ<br />
) − 2γ<br />
( 1 + 2γ<br />
) − 4γ<br />
( 1 + 3γ<br />
)<br />
1<br />
1<br />
2<br />
2<br />
L<br />
L<br />
0<br />
0<br />
2<br />
1<br />
0<br />
− 2γ<br />
2<br />
0<br />
1<br />
1<br />
⎤ ⎡ v1<br />
⎤<br />
⎥ ⎢ ⎥<br />
⎥ ⎢φ<br />
1<br />
⎥<br />
⎥ ⎢ ⎥<br />
⎥ ⎢v<br />
⎥<br />
2<br />
⎥ ⎢ ⎥<br />
⎥ ⎢ ⎥<br />
⎣φ<br />
2<br />
⎦ ⎦<br />
(16)<br />
1<br />
= S q<br />
~<br />
Δ<br />
Sijoittamalla (16) taipuman lausekkeeseen (6) päästään lopulta haettuun muotoon<br />
⎛<br />
( ) N q<br />
~ 1<br />
S q<br />
~ ⎞ ⎛ 1 ⎞ ~<br />
v x = ⎜ + ⎟ = N ⎜I<br />
+ S⎟<br />
q<br />
~<br />
= N q<br />
~<br />
. (17)<br />
⎝ Δ ⎠ ⎝ Δ ⎠<br />
<strong>Joustavasti</strong> tuetun tasopalkin muotofunktio ovat siten<br />
~<br />
s21<br />
s41<br />
N1(<br />
x)<br />
= N1(<br />
x)<br />
+ N<br />
2<br />
( x)<br />
+ N<br />
4<br />
( x)<br />
Δ Δ<br />
~ ⎛ s22<br />
⎞ s42<br />
N<br />
2<br />
( x)<br />
= ⎜1+<br />
⎟ N<br />
2<br />
( x)<br />
+ N<br />
4<br />
( x)<br />
⎝ Δ ⎠ Δ<br />
, (18)<br />
~ s23<br />
s43<br />
N<br />
3<br />
( x)<br />
= N<br />
2<br />
( x)<br />
+ N<br />
3(<br />
x)<br />
+ N<br />
4<br />
( x)<br />
Δ<br />
Δ<br />
~ s24<br />
⎛ s44<br />
⎞<br />
N<br />
4<br />
( x)<br />
= N<br />
2<br />
( x)<br />
+ ⎜1+<br />
⎟ N<br />
4<br />
( x)<br />
Δ ⎝ Δ ⎠<br />
26
missä s ij viittaa matriisin S alkioon ja N 1(<br />
x ) , N ( x)<br />
, ( )<br />
2<br />
N<br />
3<br />
x ja N<br />
4<br />
( x ) ovat Hermiten<br />
polynomit.<br />
Mikäli liitokset ovat jäykkiä eli k 1<br />
= k 2<br />
= ∞ pelkistyvät N ~<br />
1(<br />
x ) , N ~<br />
( x)<br />
, N ~<br />
( x)<br />
ja<br />
2 3<br />
~<br />
N<br />
4<br />
( x)<br />
Hermiten polynomeiksi, sillä silloin γ<br />
1<br />
= γ<br />
2<br />
= 0 ja siten s<br />
ij<br />
= 0 ja Δ = 1. Jos<br />
taas liitokset vastaavat niveliä eli k = k 0, sievenevät muotofunktiot muotoon<br />
~<br />
N ( x)<br />
= 1−<br />
1<br />
~ x<br />
N<br />
3<br />
( x)<br />
=<br />
L<br />
x<br />
L<br />
1 2<br />
=<br />
~<br />
N<br />
2<br />
( x)<br />
= 0<br />
. (19)<br />
~<br />
N ( x)<br />
= 0<br />
4<br />
Poikittaisiirtymä muuttuu siten elementin alueella lineaarisesti, kuten sauvalla<br />
kuuluukin muuttua.<br />
JÄYKKYYSMATRIISI<br />
Yksinkertaisin tapa johtaa rotaatiojousilla tuetun tasopalkin jäykkyysmatriisi lienee<br />
staattinen tiivistys, missä tavallisen palkkielementin ja kahden jousielementin muodostamasta<br />
mallista tiivistetään kaksi sisäistä rotaatiovapausastetta pois. Tuloksena saadaan<br />
alkuperäiset elementit korvaava ns. superelementti. Jäljelle jäävien ulkoisten<br />
vapausasteiden siirtymien arvojen kannalta on sama, käytetäänkö alkuperäistä palkkia ja<br />
kahta jousta vai uutta superelementtiä. Staattisella tiivistyksellä tarkoitetaan statiikan<br />
ongelman osittaista etukäteen tapahtuvaa ratkaisemista, joka ei hävitä informaatiota.<br />
Rakenteen ominaistaajuuksia ja lineaarisen stabiilisuuteorian mukaista alinta positiivista<br />
kuormituskerrointa laskettaessa päädytään ominaisarvotehtävän ratkaisemiseen.<br />
Alkuperäisellä rakenteella ja staattisen tiivistyksen jälkeisellä superelementeistä<br />
koostuvalla rakenteella on eri määrä vapausasteita ja siten myös eri määrä<br />
ominaispareja. Ominaisarvotehtävien ratkaisut eivät ole siis samat ennen ja jälkeen<br />
staattisen tiivistyksen. Tästä syystä joustavasti tuetun tasopalkin massamatriisin ja<br />
geometrisen jäykkyysmatriisin muodostamisessa käytetään muotofunktioita.<br />
Johdonmukaisuuden vuoksi on tässä esityksessä myös jäykkyysmatriisi johdettu<br />
käyttäen muotofunktioita.<br />
Rotaatiojousilla tuetun tasopalkin kimmoenergia U koostuu itse palkkiin sitoutuneesta<br />
kimmoenergiasta U 1 ja jousiin sitoutuneesta kimmoenergiasta U 2<br />
U = U 1<br />
+ U 2<br />
. (20)<br />
Palkkiin varastoitunut kimmoenergia U 1 saadaan laskettua taipuman v(x) avulla kaavasta<br />
L<br />
1<br />
2<br />
U = ∫ EI v′<br />
1 2<br />
( x)<br />
dx<br />
. (21)<br />
0<br />
Lausekkeen (17) perusteella taipuman toiseksi derivaataksi tulee<br />
27
⎛ 1 ⎞<br />
v ′ ( x)<br />
= N′′<br />
⎜I<br />
+ S⎟ q<br />
~ . (22)<br />
⎝ Δ ⎠<br />
Sijoittamalla (22) U 1 :n lausekkeeseen ja sieventämällä päädytään tulokseen<br />
U<br />
1<br />
L L L<br />
L<br />
q<br />
~ ⎧<br />
T<br />
T EI T EI T T EI<br />
= 1<br />
2 ⎨∫EI<br />
N′′<br />
N′′<br />
dx<br />
+ ∫ N′′<br />
N′′<br />
S dx<br />
+ S N′′<br />
N′′<br />
d + S<br />
2<br />
⎩<br />
Δ<br />
∫<br />
x<br />
Δ<br />
∫<br />
0 0 0<br />
0<br />
Δ<br />
Koska tavallisen jäykästi tuetun tasopalkin jäykkyysmatriisi k 0 määritellään<br />
L<br />
T<br />
N′′<br />
T<br />
⎫<br />
N′′<br />
S dx<br />
q<br />
~<br />
⎬<br />
⎭<br />
(23)<br />
T<br />
k = ∫ EI ′′ ′<br />
0<br />
N N dx<br />
, (24)<br />
0<br />
menee U 1 edelleen muotoon<br />
1<br />
q<br />
~ T ⎛ 1 1 T 1 T ⎞<br />
U k k S S k S k S q<br />
~<br />
1<br />
=<br />
2 ⎜ 0<br />
+<br />
0<br />
+<br />
0<br />
+<br />
2 0 ⎟ . (25)<br />
⎝ Δ Δ Δ ⎠<br />
Rotaatiojousiin varastoitunut kimmoenergia riippuu kulmista α<br />
1<br />
ja α<br />
2<br />
ollen muotoa<br />
1 2 1 2<br />
2 2<br />
k<br />
1α<br />
1 2<br />
k<br />
2α<br />
2<br />
U = + . (26)<br />
⎡<br />
1<br />
2<br />
Yhteyden ⎢ 0 M M ⎤<br />
p = − 0 − ⎥<br />
⎣ k1<br />
k2<br />
⎦<br />
M<br />
−<br />
k1<br />
M<br />
−<br />
k<br />
2<br />
1<br />
2<br />
1<br />
=<br />
Δ<br />
1<br />
=<br />
Δ<br />
[ s s s s ]<br />
21<br />
[ s s s s ] q<br />
~<br />
= s q<br />
~<br />
41<br />
22<br />
42<br />
23<br />
43<br />
24<br />
44<br />
T<br />
ja lausekkeen (16) perusteella nähdään, että<br />
missä s 2 on matriisin S toinen rivi ja s 4 vastaavasti neljäs rivi.<br />
q<br />
~ 1<br />
= s 2q<br />
~<br />
Δ<br />
, (27)<br />
1<br />
4<br />
Δ<br />
Huomioimalla (5) voidaan kirjoittaa edelleen<br />
1<br />
s 2<br />
q<br />
~<br />
1<br />
α<br />
1<br />
= − ja α s q<br />
~<br />
2<br />
= −<br />
4<br />
. (28)<br />
Δ<br />
Δ<br />
Sijoittamalla α<br />
1<br />
ja α<br />
2<br />
U 2 :n lausekkeeseen sekä sieventämällä saadaan<br />
q<br />
~ T<br />
⎛ k 1 T<br />
k 2 T<br />
s s s s q<br />
~<br />
2 1<br />
2 2 2 2 2 4 4 ⎟ ⎞<br />
U = ⎜<br />
+ . (29)<br />
⎝ Δ Δ ⎠<br />
Kun yhdistetään U 1 :n ja U 2 :n lausekkeet (25) ja (29) nähdään rotaatiojousilla tuetun tasopalkin<br />
jäykkyysmatriisin olevan muotoa<br />
k = k + k + , (30)<br />
0 1<br />
k<br />
2<br />
28
missä k 0 on tavallisen tasopalkin jäykkyysmatriisi<br />
⎡ 12 6 12 6 ⎤<br />
⎢<br />
−<br />
2<br />
2<br />
L L L L ⎥<br />
⎢ 6<br />
6 ⎥<br />
⎢<br />
⎥<br />
EI<br />
4 − 2<br />
k = ⎢ L<br />
L ⎥<br />
0<br />
(31)<br />
L ⎢ 12 6 12 6 ⎥<br />
⎢<br />
− − −<br />
2<br />
2<br />
L L L L⎥<br />
⎢ 6<br />
6 ⎥<br />
⎢ 2 − 4 ⎥<br />
⎣ L<br />
L ⎦<br />
ja k 1 sekä k 2 lasketaan lausekkeista<br />
k<br />
k<br />
1<br />
2<br />
1 1 T<br />
= k<br />
0S<br />
+ S k<br />
Δ Δ<br />
k1<br />
T k2<br />
= s<br />
2 2<br />
s<br />
2<br />
+ s<br />
2<br />
Δ Δ<br />
0<br />
1 T<br />
+ S k<br />
2<br />
Δ<br />
T<br />
4<br />
s<br />
4<br />
0<br />
S<br />
. (32)<br />
Jos halutaan huomioida myös palkin akselin suuntaiset vapausasteet, käy tämä helposti<br />
lisäämällä niitä vastaavat rivit ja sarakkeet. Tällöin uusi 6×6 jäykkyysmatriisi on<br />
⎡ EA<br />
EA ⎤<br />
⎢ 0 0 − 0 0<br />
L<br />
L ⎥<br />
⎢<br />
⎥<br />
⎢ 0 k11<br />
k12<br />
0 k13<br />
k14<br />
⎥<br />
⎢<br />
⎥<br />
=<br />
⎢ 0 k21<br />
k<br />
22<br />
0 k23<br />
k24<br />
k<br />
⎥<br />
. (33)<br />
⎢ EA<br />
EA ⎥<br />
⎢−<br />
0 0 0 0 ⎥<br />
⎢ L<br />
L<br />
⎥<br />
⎢ 0 k31<br />
k32<br />
0 k33<br />
k34<br />
⎥<br />
⎢<br />
⎥<br />
⎢⎣<br />
0 k41<br />
k<br />
42<br />
0 k43<br />
k44<br />
⎥⎦<br />
MASSAMATRIISI<br />
Palkin liike-energia T on siirtymän v = v( x,<br />
t)<br />
avulla lausuttuna muotoa<br />
T<br />
=<br />
L<br />
1 2<br />
2 ∫ mv d<br />
0<br />
& x . (34)<br />
Lauseketta (17) derivoimalla ajan suhteen saadaan<br />
⎛ 1 ⎞<br />
v & = N ⎜I<br />
+ S ⎟⎠ q<br />
~ & . (35)<br />
⎝ Δ<br />
Sijoittamalla (35) kaavaan (34) ja sieventämällä päädytään muotoon<br />
29
T<br />
L<br />
L<br />
L<br />
L<br />
= q<br />
~ &<br />
⎛<br />
T<br />
T m T m<br />
⎞<br />
1<br />
T T<br />
T T<br />
⎜ N N d N NS d S N N d S N NS d ⎟ q<br />
~ &<br />
2<br />
∫ + ∫<br />
+<br />
+<br />
2<br />
⎝<br />
Δ<br />
∫<br />
Δ<br />
∫<br />
m<br />
m x<br />
x<br />
x<br />
x<br />
0<br />
0<br />
0<br />
0<br />
Δ<br />
⎠<br />
(36)<br />
Tavallisen jäykästi tuetun tasopalkin konsistentti massamatriisi on muotoa<br />
L<br />
∫<br />
T<br />
m<br />
0<br />
= m N N dx<br />
, (37)<br />
0<br />
joten liike-energiaksi saadaan<br />
1<br />
q<br />
~ & T ⎛ 1 1 T 1 T ⎞<br />
T = m m S S m S m S q<br />
~ &<br />
2 ⎜ 0<br />
+<br />
0<br />
+<br />
0<br />
+<br />
2 0 ⎟ . (38)<br />
⎝ Δ Δ Δ ⎠<br />
<strong>Joustavasti</strong> tuetun tasopalkin konsistentti massamatriisi m on siten muotoa<br />
m = m 0<br />
+ m 1<br />
, (39)<br />
missä m 0 on tavallisen jäykästi tuetun palkin massamatriisi<br />
m<br />
0<br />
⎡ 156<br />
⎢<br />
ρ AL ⎢ 22L<br />
= ⎢<br />
420 ⎢ 54<br />
⎢<br />
⎢<br />
⎣−13L<br />
22L<br />
4L<br />
2<br />
13L<br />
− 3L<br />
2<br />
54<br />
13L<br />
156<br />
− 22L<br />
−13L⎤<br />
⎥<br />
2<br />
− 3L<br />
⎥<br />
⎥<br />
− 22L⎥<br />
⎥<br />
2<br />
4L<br />
⎥<br />
⎦<br />
(40)<br />
ja m 1 lasketaan kaavasta<br />
1 1 T 1 T<br />
= m<br />
0S<br />
+ S m<br />
0<br />
+ S m S . (41)<br />
2<br />
Δ Δ Δ<br />
m1<br />
0<br />
Aksiaalisten vapausasteiden huomioiminen onnistuu lisäämällä niitä vastaavat rivit ja<br />
sarakkeet, jolloin uudeksi 6×6 massamatriisiksi saadaan<br />
1<br />
1<br />
⎡<br />
3<br />
ρ AL 0 0<br />
6<br />
ρ AL 0 0 ⎤<br />
⎢<br />
⎥<br />
⎢<br />
0 m11<br />
m12<br />
0 m13<br />
m14<br />
⎥<br />
⎢ 0 m<br />
⎥<br />
21<br />
m22<br />
0 m23<br />
m24<br />
m = ⎢<br />
1<br />
1<br />
⎥ . (42)<br />
⎢ 6<br />
ρ AL 0 0<br />
3<br />
ρ AL 0 0 ⎥<br />
⎢ 0 m<br />
⎥<br />
31<br />
m32<br />
0 m33<br />
m34<br />
⎢<br />
⎥<br />
⎢⎣<br />
0 m41<br />
m42<br />
0 m43<br />
m44<br />
⎥⎦<br />
30
GEOMETRINEN JÄYKKYYSMATRIISI<br />
Mikäli muotofunktiot ˆN<br />
1<br />
, ˆN<br />
2<br />
, … tunnetaan, elementin geometrinen jäykkyysmatriisi<br />
saadaan niiden avulla lausekkeesta<br />
L<br />
T<br />
k = P∫ ′ ′<br />
g<br />
N N dx<br />
, (43)<br />
0<br />
missä P on normaalivoima.<br />
Lausekkeen (17) perusteella nähdään, että tällä kertaa muotofunktioiden derivaatta on<br />
muotoa<br />
~ ⎛ 1 ⎞<br />
N′ = N′<br />
⎜I<br />
+ S⎟<br />
. (44)<br />
⎝ Δ ⎠<br />
Sijoittamalla (44) kaavaan (43)ja sieventämällä päädytään muotoon<br />
L<br />
L<br />
L<br />
T P T P T T P T T<br />
k = ∫ P ′ ′ x + ∫<br />
′ ′ x + ∫<br />
′ ′ x + ∫<br />
′ ′<br />
g<br />
N N d N N S d S N N d S N N S dx<br />
. (45)<br />
2<br />
Δ<br />
Δ<br />
Δ<br />
0<br />
0<br />
Koska jäykästi tuetun tasopalkin geometrinen jäykkyysmatriisi on muotoa<br />
L<br />
P<br />
0<br />
T<br />
k = ∫ N′<br />
N′<br />
dx<br />
, (46)<br />
g0<br />
0<br />
tulee joustavasti tuetun tasopalkkielementin geometriseksi jäykkyysmatriisiksi<br />
k = k + k , (47)<br />
g<br />
g0<br />
g1<br />
missä k g0 on tavallisen palkkielementin geometrinen jäykkyysmatriisi<br />
⎡ 36 3L<br />
− 36 3L<br />
⎤<br />
⎢<br />
⎥<br />
2<br />
2<br />
P ⎢ 3L<br />
4L<br />
− 3L<br />
− L ⎥<br />
k<br />
g0<br />
= ⎢<br />
⎥<br />
(48)<br />
30L<br />
⎢−<br />
36 − 3L<br />
36 − 3L⎥<br />
⎢<br />
⎥<br />
⎢<br />
2<br />
2<br />
⎣ 3L<br />
− L − 3L<br />
4L<br />
⎥<br />
⎦<br />
ja k g1 on puolestaan muotoa<br />
1 1 T 1 T<br />
= k<br />
g0S<br />
+ S k<br />
g0<br />
+ S k<br />
g<br />
S . (49)<br />
2<br />
Δ Δ Δ<br />
k<br />
g1<br />
0<br />
Aksiaaliset vapausasteet huomioiden saadaan 6×6 geometriseksi jäykkyysmatriisiksi<br />
L<br />
0<br />
31
⎡0<br />
0 0 0 0 0 ⎤<br />
⎢<br />
⎥<br />
⎢0<br />
kg11<br />
kg12<br />
0 kg13<br />
kg14<br />
⎥<br />
⎢<br />
⎥<br />
⎢0<br />
k<br />
⎥<br />
g21<br />
kg22<br />
0 kg23<br />
kg24<br />
k = ⎢<br />
⎥<br />
g<br />
. (50)<br />
⎢0<br />
0 0 0 0 0 ⎥<br />
⎢<br />
⎥<br />
⎢0<br />
k<br />
⎥<br />
g31<br />
kg32<br />
0 kg33<br />
kg34<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
⎣0<br />
kg41<br />
kg42<br />
0 kg43<br />
kg44<br />
⎦<br />
ESIMERKKITEHTÄVÄ<br />
Tarkastellaan esimerkkitehtävässä kuvan 3 mukaista kymmenestä palkista koottua rakennetta.<br />
Kehän palkit ovat suorakaiteen muotoisia 180 mm korkeita, 100 mm leveitä ja<br />
seinämän paksuudeltaan 7,1 mm olevia putkipalkkeja. Risteäviä palkkeja ei ole liitetty<br />
yhteen.<br />
L<br />
F<br />
F<br />
v<br />
F=50 kN<br />
A=3601 mm 2<br />
I=1,463⋅10 7 mm 4<br />
L=2 m<br />
E=210 GPa<br />
ρ=7850 kg/m 3<br />
L<br />
L<br />
Kuva 3. Kymmenen palkin kehä.<br />
Rakenteen laskentamallissa on kaksi edellä kuvatun kaltaista kuuden vapausasteen elementtiä<br />
kutakin palkkia kohden, jolloin tuntemattomien vapausasteiden määräksi tulee<br />
42. Ratkaistaan mallilla oikeanpuoleisen voiman vaikutuspisteen pystysiirtymä v, rakenteen<br />
alin ominaistaajuus f 1 ja pienin lineaarisen stabiilisuusteorian mukainen kuormituskerroin<br />
λ<br />
kr<br />
palkkien liitosten jäykkyyden k funktiona. Tällöin on oletettu, että arvo<br />
k=10 15 vastaa saman palkin peräkkäisten elementtien välistä jäykkää liitosta. Saadut<br />
tulokset on esitetty oheisissa kuvissa 4, 5 ja 6. Kuvissa olevat vaakasuorat katkoviivat<br />
vastaavat Ansys-ohjelmalla 20 tasopalkkielementin mallilla saatuja tuloksia, kun kaikki<br />
liitokset ovat jäykkiä (k=∞) tai palkkien liitoksista on taivutusjäykkyys poistettu (k=0).<br />
Kuvaajia 4, 5 ja 6 laskettaessa jäykkyyttä k ei voitu asettaa tasan nollaksi. Saatujen<br />
32
kokemusten perusteella k voi kuitenkin olla ilman suurempia numeerisia ongelmia<br />
melko lähellä nollaa tai vastaavasti lukuarvoltaan hyvin suuri.<br />
1.45<br />
v<br />
[mm]<br />
1.445<br />
1.44<br />
1.435<br />
1.43<br />
1.425<br />
0 1 2 3 4<br />
k<br />
x 10 8<br />
Kuva 4. Pystysiirtymä v palkin päiden jäykkyyden k funktiona.<br />
f 1<br />
[Hz]<br />
70<br />
68<br />
66<br />
64<br />
62<br />
60<br />
58<br />
56<br />
0 1 2 3 4<br />
k<br />
x 10 8<br />
Kuva 5. Alin ominaistaajuus f 1 palkin päiden jäykkyyden k funktiona.<br />
220<br />
200<br />
180<br />
λ 160<br />
kr<br />
140<br />
120<br />
100<br />
80<br />
60<br />
0 1 2 3 4<br />
k<br />
x 10 8<br />
Kuva 6.<br />
Lineaarisen stabiilisuusteorian mukainen kuormituskerroin λ kr palkin päiden<br />
jäykkyyden k funktiona.<br />
33
Kuvien 4 - 6 perusteella voidaan tehdä <strong>seura</strong>avat päätelmät:<br />
• Liitosten jäykkyyden kasvaessa nollasta käyttäytyy rakenne nopeasti kuten kehä.<br />
• Kun liitosten jäykkyys lisääntyy, pienenevät siirtymät, alin ominaistaajuus kasvaa<br />
ja stabiilisuus menetetään vasta suuremmalla kuormituksella.<br />
• Pystysiirtymä v muuttuu vähän, mutta alin ominaistaajuus f 1 ja kriittinen kuormituskerroin<br />
λ<br />
kr<br />
muuttuvat melko paljon, kun k kasvaa nollasta.<br />
• <strong>Joustavasti</strong> tuetulla tasopalkkielementillä saadut tulokset sattuvat hyvin Ansysohjelmalla<br />
laskettujen vertailuratkaisujen väliin.<br />
YHTEENVETO<br />
Palkin päiden tuennan jousto voidaan mallintaa melko yksinkertaisella tavalla käyttäen<br />
palkin päissä lineaarisia rotaatiojousia. Esitetty menetelmä ei vastaa täysin todellista<br />
epälineaarista käyttäytymistä, mutta on kuitenkin parempi vaihtoehto kuin olettaa<br />
liitokset suoraan niveliksi tai täysin jäykiksi.<br />
Esitetyllä tavalla FEM-mallin tuntemattomien vapausasteiden määrä ei kasva, vaikka<br />
tuennan jousto huomioidaan. Tavallisen jäykästi tuetun tasopalkin jäykkyys- ja massamatriisi<br />
sekä geometrinen jäykkyysmatriisi voidaan muuntaa vastaamaan joustavasti<br />
<strong>tuettu</strong>a palkkia kertomalla niitä tuennan jäykkyydestä riippuvalla vakiomatriisilla S.<br />
Tällöin näiden matriisien laskenta ei muutu oleellisesti työläämmäksi.<br />
Laskuesimerkin perusteella nähdään, että tuennan joustavuudella ei ole juuri vaikutusta<br />
ristikkomaisen rakenteen siirtymiin, mutta sillä on melko suuri vaikutus alimpaan<br />
ominaistaajuuteen f 1 ja lineaarisen stabiilisuusteorian mukaiseen kriittiseen<br />
kuormituskertoimeen λ kr . f 1 :n ja λ kr :n herkkyys liitosten jäykkyydelle k liittynee<br />
rakenteen käytöksen muuttumiseen ristikosta kehäksi. Ominaisarvojen muuttuessa myös<br />
niitä vastaavat ominaismuodot muuttuvat, jolloin ei ole enää kyse samasta ilmiöstä.<br />
Liitosten jäykkyyden ilmoittavat jousivakiot oletettiin tässä esityksessä etukäteen tunnetuiksi.<br />
Niiden suuruuden arviointi voi olla kuitenkin hankala tehtävä. Kehän liitoksen<br />
jäykkyyteen vaikuttaa valitun liitostyypin lisäksi liitettävien palkkien tyyppi, koko ja<br />
lukumäärä.<br />
LÄHTEET<br />
[1] Pui, P., Chui, T. & Chan, S. L. 1997. Vibration and deflection characteristics of<br />
semi-rigid jointed frames. Engineering Structurers 19, 12, s. 1001-1010.<br />
[2] Sekulovic, M. & Salatic, R. 2001. Nonlinear analysis of frames with flexible<br />
connections. Computers & Structures 79, s. 1097-1107.<br />
[3] Sekulovic, M., Salatic, R. & Nefovska, M. 2001. Dynamic analysis of steel<br />
frames with flexible connections. Computers & Structures 80, s. 935-955.<br />
34
[4] Suarez, L. E., Singh, M. P. & Matheu, E. E. 1996. Seismic responcse of<br />
structural frameworks with flexible connections. Computers & Structures 58, 1,<br />
s. 27-41.<br />
Jussi Jalkanen, tutkija<br />
Tampereen teknillinen yliopisto,<br />
Teknillisen <strong>mekaniikan</strong> ja optimoinnin<br />
laitos, PL 589, 33101 Tampere<br />
jussi.jalkanen@tut.fi<br />
35