Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ... Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Capitulo 2. Modelos Computacionales para el Movimiento de Agarre dE dt dE dt A T ( ET abs( IT TT ) ) = α ⋅ − + − (2.8) ( EA abs( I A2 GA2 ) ) = α ⋅ − + − (2.9) dR = α ⋅( −β ⋅ R + ε ⋅( B − R) ⋅ ( µ T ET + µ AE A ) ) (2.10) dt ⎛ 2 ⎞ t GO( t) = g ⋅⎜ − g 2 R ⋅ R ⎟ ⎜ ( γ + t ) ⎟ ⎝ ⎠ dT dt T 64 T (2.11) = α ⋅ E (2.12) dGA2 = α ⋅ E dt G = I A1 A1 A (2.13) donde, α, β, B, γ, ε, µT, µA y gR son constantes cuyo valor quedará definido en el siguiente apartado, y los vectores EA y ET poseen la misma función que en el modelo de Ulloa – Bullock. 3.3 Simulaciones de los modelos 3.3.1 Características básicas del movimiento de agarre. A la hora de testear la habilidad de nuestro modelo para simular las características cualitativas del agarre, un movimiento similar al de las experiencias de Paulignan y col (1991a) ha sido simulado. En este experimento, el objeto que debe ser agarrado tiene un tamaño de 1.5 cm. La distancia entre la posición inicial y final de la muñeca es de 36 cm. La Figura 2.7b muestra los resultados de la simulación. El modelo reproduce las características básicas de un movimiento de agarre normal, tal y como se muestra en la Figura 2.7a. La velocidad de transporte exhibe un perfil acampanado típico de movimientos punto a punto. El dibujo de la apertura de la pinza de agarre, muestra la apertura de ésta hasta su MGA, y posteriormente un periodo de cierre hasta su contacto con el objeto. La apertura de agarre como el transporte de la mano finalizan simultáneamente. La generación de la señal GO empleada es tan solo una representación de señales de ganancia-paso reales, cuyo origen se encuentra en los
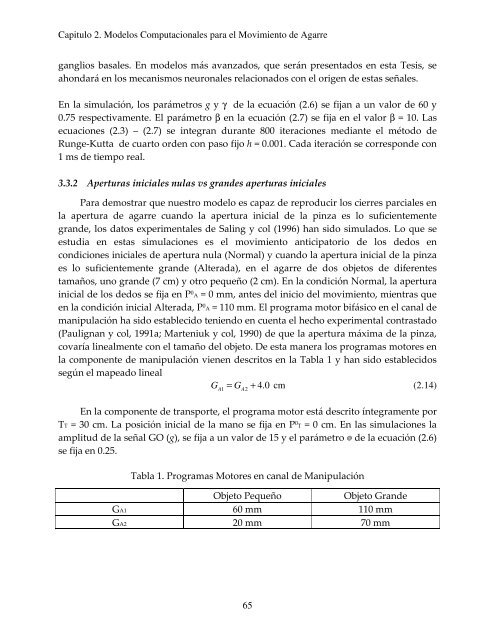
Capitulo 2. Modelos Computacionales para el Movimiento de Agarre ganglios basales. En modelos más avanzados, que serán presentados en esta Tesis, se ahondará en los mecanismos neuronales relacionados con el origen de estas señales. En la simulación, los parámetros g y γ de la ecuación (2.6) se fijan a un valor de 60 y 0.75 respectivamente. El parámetro β en la ecuación (2.7) se fija en el valor β = 10. Las ecuaciones (2.3) – (2.7) se integran durante 800 iteraciones mediante el método de Runge-Kutta de cuarto orden con paso fijo h = 0.001. Cada iteración se corresponde con 1 ms de tiempo real. 3.3.2 Aperturas iniciales nulas vs grandes aperturas iniciales Para demostrar que nuestro modelo es capaz de reproducir los cierres parciales en la apertura de agarre cuando la apertura inicial de la pinza es lo suficientemente grande, los datos experimentales de Saling y col (1996) han sido simulados. Lo que se estudia en estas simulaciones es el movimiento anticipatorio de los dedos en condiciones iniciales de apertura nula (Normal) y cuando la apertura inicial de la pinza es lo suficientemente grande (Alterada), en el agarre de dos objetos de diferentes tamaños, uno grande (7 cm) y otro pequeño (2 cm). En la condición Normal, la apertura inicial de los dedos se fija en P0 A = 0 mm, antes del inicio del movimiento, mientras que en la condición inicial Alterada, P0 A = 110 mm. El programa motor bifásico en el canal de manipulación ha sido establecido teniendo en cuenta el hecho experimental contrastado (Paulignan y col, 1991a; Marteniuk y col, 1990) de que la apertura máxima de la pinza, covaría linealmente con el tamaño del objeto. De esta manera los programas motores en la componente de manipulación vienen descritos en la Tabla 1 y han sido establecidos según el mapeado lineal G = G + cm (2.14) A1 A2 4.0 En la componente de transporte, el programa motor está descrito íntegramente por TT = 30 cm. La posición inicial de la mano se fija en P 0 T = 0 cm. En las simulaciones la amplitud de la señal GO (g), se fija a un valor de 15 y el parámetro � de la ecuación (2.6) se fija en 0.25. Tabla 1. Programas Motores en canal de Manipulación Objeto Pequeño Objeto Grande GA1 60 mm 110 mm GA2 20 mm 70 mm 65
- Page 21 and 22: Capitulo 1. El Movimiento de Agarre
- Page 23 and 24: Capitulo 1. El Movimiento de Agarre
- Page 25 and 26: Capitulo 1. El Movimiento de Agarre
- Page 27 and 28: Capitulo 1. El Movimiento de Agarre
- Page 29 and 30: Capitulo 1. El Movimiento de Agarre
- Page 31 and 32: Capitulo 1. El Movimiento de Agarre
- Page 33 and 34: Capitulo 1. El Movimiento de Agarre
- Page 35 and 36: Capitulo 1. El Movimiento de Agarre
- Page 37 and 38: Capitulo 1. El Movimiento de Agarre
- Page 39 and 40: Capitulo 1. El Movimiento de Agarre
- Page 41 and 42: Capitulo 1. El Movimiento de Agarre
- Page 43 and 44: Capitulo 1. El Movimiento de Agarre
- Page 45 and 46: Capitulo 1. El Movimiento de Agarre
- Page 47 and 48: Capitulo 1. El Movimiento de Agarre
- Page 49 and 50: Capitulo 1. El Movimiento de Agarre
- Page 51 and 52: Capitulo 1. El Movimiento de Agarre
- Page 53 and 54: Capitulo 2. Modelos Computacionales
- Page 55 and 56: Capitulo 2. Modelos Computacionales
- Page 57 and 58: Capitulo 2. Modelos Computacionales
- Page 59 and 60: Capitulo 2. Modelos Computacionales
- Page 61 and 62: Capitulo 2. Modelos Computacionales
- Page 63 and 64: Capitulo 2. Modelos Computacionales
- Page 65 and 66: Capitulo 2. Modelos Computacionales
- Page 67 and 68: Capitulo 2. Modelos Computacionales
- Page 69 and 70: Capitulo 2. Modelos Computacionales
- Page 71: Capitulo 2. Modelos Computacionales
- Page 75 and 76: Capitulo 2. Modelos Computacionales
- Page 77 and 78: Capitulo 2. Modelos Computacionales
- Page 79 and 80: Capitulo 2. Modelos Computacionales
- Page 81 and 82: Capitulo 2. Modelos Computacionales
- Page 83 and 84: Capitulo 2. Modelos Computacionales
- Page 85 and 86: Capitulo 2. Modelos Computacionales
- Page 87 and 88: Capitulo 2. Modelos Computacionales
- Page 89 and 90: Capitulo 2. Modelos Computacionales
- Page 91 and 92: Capitulo 2. Modelos Computacionales
- Page 93 and 94: Capitulo 2. Modelos Computacionales
- Page 95 and 96: Capitulo 2. Modelos Computacionales
- Page 97 and 98: Capitulo 3. El Agarre en la EP. Mod
- Page 99 and 100: Capitulo 3. El Agarre en la EP. Mod
- Page 101 and 102: Capitulo 3. El Agarre en la EP. Mod
- Page 103 and 104: Capitulo 3. El Agarre en la EP. Mod
- Page 105 and 106: Capitulo 3. El Agarre en la EP. Mod
- Page 107 and 108: Capitulo 3. El Agarre en la EP. Mod
- Page 109 and 110: Capitulo 3. El Agarre en la EP. Mod
- Page 111 and 112: Capitulo 3. El Agarre en la EP. Mod
- Page 113 and 114: Capitulo 3. El Agarre en la EP. Mod
- Page 115 and 116: Capitulo 3. El Agarre en la EP. Mod
- Page 117 and 118: Capitulo 3. El Agarre en la EP. Mod
- Page 119 and 120: Capitulo 3. El Agarre en la EP. Mod
- Page 121 and 122: Capitulo 3. El Agarre en la EP. Mod
Capitulo 2. Mo<strong>de</strong>los Computacionales para el Movimiento <strong>de</strong> Agarre<br />
ganglios basales. En mo<strong>de</strong>los más avanzados, que serán presentados en esta Tesis, se<br />
ahondará en los mecanismos neuronales relacionados con el origen <strong>de</strong> estas señales.<br />
En la simulación, los parámetros g y γ <strong>de</strong> la ecuación (2.6) se fijan a un valor <strong>de</strong> 60 y<br />
0.75 respectivamente. El parámetro β en la ecuación (2.7) se fija en el valor β = 10. Las<br />
ecuaciones (2.3) – (2.7) se integran durante 800 iteraciones mediante el método <strong>de</strong><br />
Runge-Kutta <strong>de</strong> cuarto or<strong>de</strong>n con paso fijo h = 0.001. Cada iteración se correspon<strong>de</strong> con<br />
1 ms <strong>de</strong> tiempo real.<br />
3.3.2 Aperturas iniciales nulas vs gran<strong>de</strong>s aperturas iniciales<br />
Para <strong>de</strong>mostrar que nuestro mo<strong>de</strong>lo es capaz <strong>de</strong> reproducir los cierres parciales en<br />
la apertura <strong>de</strong> agarre cuando la apertura inicial <strong>de</strong> la pinza es lo suficientemente<br />
gran<strong>de</strong>, los datos experimentales <strong>de</strong> Saling y col (1996) han sido simulados. Lo que se<br />
estudia en estas simulaciones es el movimiento anticipatorio <strong>de</strong> los <strong>de</strong>dos en<br />
condiciones iniciales <strong>de</strong> apertura nula (Normal) y cuando la apertura inicial <strong>de</strong> la pinza<br />
es lo suficientemente gran<strong>de</strong> (Alterada), en el agarre <strong>de</strong> dos objetos <strong>de</strong> diferentes<br />
tamaños, uno gran<strong>de</strong> (7 cm) y otro pequeño (2 cm). En la condición Normal, la apertura<br />
inicial <strong>de</strong> los <strong>de</strong>dos se fija en P0 A = 0 mm, antes <strong>de</strong>l inicio <strong>de</strong>l movimiento, mientras que<br />
en la condición inicial Alterada, P0 A = 110 mm. El programa motor bifásico en el canal <strong>de</strong><br />
manipulación ha sido establecido teniendo en cuenta el hecho experimental contrastado<br />
(Paulignan y col, 1991a; Marteniuk y col, 1990) <strong>de</strong> que la apertura máxima <strong>de</strong> la pinza,<br />
covaría linealmente con el tamaño <strong>de</strong>l objeto. De esta manera los programas motores en<br />
la componente <strong>de</strong> manipulación vienen <strong>de</strong>scritos en la Tabla 1 y han sido establecidos<br />
según el mapeado lineal<br />
G = G + cm (2.14)<br />
A1 A2<br />
4.0<br />
En la componente <strong>de</strong> transporte, el programa motor está <strong>de</strong>scrito íntegramente por<br />
TT = 30 cm. La posición inicial <strong>de</strong> la mano se fija en P 0 T = 0 cm. En las simulaciones la<br />
amplitud <strong>de</strong> la señal GO (g), se fija a un valor <strong>de</strong> 15 y el parámetro � <strong>de</strong> la ecuación (2.6)<br />
se fija en 0.25.<br />
Tabla 1. Programas Motores en canal <strong>de</strong> Manipulación<br />
Objeto Pequeño Objeto Gran<strong>de</strong><br />
GA1 60 mm 110 mm<br />
GA2 20 mm 70 mm<br />
65


