Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ... Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
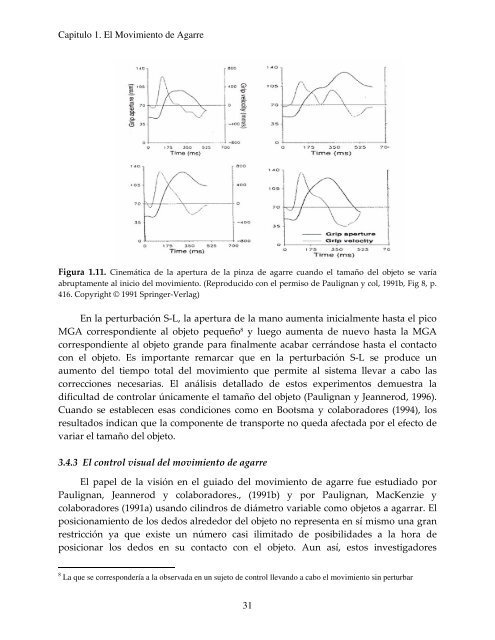
Capitulo 1. El Movimiento de Agarre Figura 1.11. Cinemática de la apertura de la pinza de agarre cuando el tamaño del objeto se varía abruptamente al inicio del movimiento. (Reproducido con el permiso de Paulignan y col, 1991b, Fig 8, p. 416. Copyright © 1991 Springer-Verlag) En la perturbación S-L, la apertura de la mano aumenta inicialmente hasta el pico MGA correspondiente al objeto pequeño 8 y luego aumenta de nuevo hasta la MGA correspondiente al objeto grande para finalmente acabar cerrándose hasta el contacto con el objeto. Es importante remarcar que en la perturbación S-L se produce un aumento del tiempo total del movimiento que permite al sistema llevar a cabo las correcciones necesarias. El análisis detallado de estos experimentos demuestra la dificultad de controlar únicamente el tamaño del objeto (Paulignan y Jeannerod, 1996). Cuando se establecen esas condiciones como en Bootsma y colaboradores (1994), los resultados indican que la componente de transporte no queda afectada por el efecto de variar el tamaño del objeto. 3.4.3 El control visual del movimiento de agarre El papel de la visión en el guiado del movimiento de agarre fue estudiado por Paulignan, Jeannerod y colaboradores., (1991b) y por Paulignan, MacKenzie y colaboradores (1991a) usando cilindros de diámetro variable como objetos a agarrar. El posicionamiento de los dedos alrededor del objeto no representa en sí mismo una gran restricción ya que existe un número casi ilimitado de posibilidades a la hora de posicionar los dedos en su contacto con el objeto. Aun así, estos investigadores 8 La que se correspondería a la observada en un sujeto de control llevando a cabo el movimiento sin perturbar 31
Capitulo 1. El Movimiento de Agarre observaron durante sus experimentos que, la posición final de los dedos al contactar con los cilindros presentaba una variabilidad espacial muy pequeña. Resultados similares han sido obtenidos por Jakobson y Goodale (1994). Estos autores mostraron cómo en el agarre de objetos con formas complicadas, los sujetos elegían unos puntos de contacto sobre la superficie del objeto que ofrecían una variabilidad espacial muy reducida. Este elevado grado de precisión en el posicionamiento de los dedos implica un control muy preciso de los desplazamientos de la mano hacia su posición final. Morasso (1981) sugirió que el punto empleado para guiar visualmente el movimiento del brazo debiera ser lo mas distal que fuese posible. Este punto distal, sería pues el más relevante a la hora de describir la componente de transporte del movimiento de agarre. Un candidato posible a ser este punto podría ser el centro de la muñeca (Arbib y col, 1985a) en cuyo caso el sistema motor debe calcular continuamente el vector distancia entre el centro del objeto y el centro de la muñeca 9 . Otra posibilidad propuesta por Wing y colaboradores (Fraser y Wing, 1981; Wing y Fraser, 1983; Wing y col, 1986), es que sea el pulgar el punto escogido como referencia distal en lugar de la muñeca. En los trabajos mencionados, los autores mostraron que durante el agarre de un objeto, el pulgar contribuye muy poco a la formación del patrón de apertura manual. Sin embargo, Paulignan y colaboradores (1991b), demostraron que en movimientos en los que se perturba, bien el tamaño bien la posición del objeto, el pulgar participa activamente en la formación del patrón de apertura manual, descartado el hecho de que sea una estrategia particular empleada en este tipo de movimientos. Para terminar con este punto, nos gustaría comentar someramente los resultados y conclusiones de una experiencia de Paulignan y colaboradores (1997), en la que se cuestiona la forma actual de la hipótesis de los canales visuomotores. Ha sido postulado que las transformaciones visuomotoras relacionadas con el alcance (componente de transporte) y la de agarre (formación de la pinza de agarre con los dedos), son controladas separadamente: es la hipótesis de los canales visuomotores. El canal de transporte obtendría información de la localización espacial del objeto para transformarlo en patrones motores que aproximen la mano adecuadamente al objeto. El canal de manipulación extraería información del tamaño y forma del objeto, para determinar un patrón de agarre adecuado. Esta idea recibe un fuerte respaldo a través de recientes trabajos anatómicos y fisiológicos que muestran distintas vías córticocorticales para el alcance y el agarre, y constituye la base funcional teórica de los diseños experimentales que cambian sistemáticamente la posición y el tamaño del objeto a agarrar. El problema es saber hasta qué punto se puede dar crédito a esta teoría 9 En los modelos desarrollados en esta Tesis Doctoral se ha adoptado el centro de la muñeca como el punto distal que permite el aprendizaje y control de los movimientos de agarre. 32
- Page 1 and 2: Universidad Politécnica de Cartage
- Page 3 and 4: Neuro - Robotics constitutes an eme
- Page 5 and 6: The results of the research develop
- Page 7 and 8: Índice General Agradecimientos Int
- Page 9 and 10: 5.2 Simulaciones del modelo. Modeli
- Page 11 and 12: Introducción 1 Introducción Intro
- Page 13 and 14: Introducción la hora de inspirar m
- Page 15 and 16: Introducción 1. Análisis experime
- Page 17 and 18: Introducción 3.7 Transferencia tec
- Page 19 and 20: Introducción presentan objetos de
- Page 21 and 22: Capitulo 1. El Movimiento de Agarre
- Page 23 and 24: Capitulo 1. El Movimiento de Agarre
- Page 25 and 26: Capitulo 1. El Movimiento de Agarre
- Page 27 and 28: Capitulo 1. El Movimiento de Agarre
- Page 29 and 30: Capitulo 1. El Movimiento de Agarre
- Page 31 and 32: Capitulo 1. El Movimiento de Agarre
- Page 33 and 34: Capitulo 1. El Movimiento de Agarre
- Page 35 and 36: Capitulo 1. El Movimiento de Agarre
- Page 37 and 38: Capitulo 1. El Movimiento de Agarre
- Page 39: Capitulo 1. El Movimiento de Agarre
- Page 43 and 44: Capitulo 1. El Movimiento de Agarre
- Page 45 and 46: Capitulo 1. El Movimiento de Agarre
- Page 47 and 48: Capitulo 1. El Movimiento de Agarre
- Page 49 and 50: Capitulo 1. El Movimiento de Agarre
- Page 51 and 52: Capitulo 1. El Movimiento de Agarre
- Page 53 and 54: Capitulo 2. Modelos Computacionales
- Page 55 and 56: Capitulo 2. Modelos Computacionales
- Page 57 and 58: Capitulo 2. Modelos Computacionales
- Page 59 and 60: Capitulo 2. Modelos Computacionales
- Page 61 and 62: Capitulo 2. Modelos Computacionales
- Page 63 and 64: Capitulo 2. Modelos Computacionales
- Page 65 and 66: Capitulo 2. Modelos Computacionales
- Page 67 and 68: Capitulo 2. Modelos Computacionales
- Page 69 and 70: Capitulo 2. Modelos Computacionales
- Page 71 and 72: Capitulo 2. Modelos Computacionales
- Page 73 and 74: Capitulo 2. Modelos Computacionales
- Page 75 and 76: Capitulo 2. Modelos Computacionales
- Page 77 and 78: Capitulo 2. Modelos Computacionales
- Page 79 and 80: Capitulo 2. Modelos Computacionales
- Page 81 and 82: Capitulo 2. Modelos Computacionales
- Page 83 and 84: Capitulo 2. Modelos Computacionales
- Page 85 and 86: Capitulo 2. Modelos Computacionales
- Page 87 and 88: Capitulo 2. Modelos Computacionales
- Page 89 and 90: Capitulo 2. Modelos Computacionales
Capitulo 1. El Movimiento <strong>de</strong> Agarre<br />
Figura 1.11. Cinemática <strong>de</strong> la apertura <strong>de</strong> la pinza <strong>de</strong> agarre cuando el tamaño <strong>de</strong>l objeto se varía<br />
abruptamente al inicio <strong>de</strong>l movimiento. (Reproducido con el permiso <strong>de</strong> Paulignan y col, 1991b, Fig 8, p.<br />
416. Copyright © 1991 Springer-Verlag)<br />
En la perturbación S-L, la apertura <strong>de</strong> la mano aumenta inicialmente hasta el pico<br />
MGA correspondiente al objeto pequeño 8 y luego aumenta <strong>de</strong> nuevo hasta la MGA<br />
correspondiente al objeto gran<strong>de</strong> para finalmente acabar cerrándose hasta el contacto<br />
con el objeto. Es importante remarcar que en la perturbación S-L se produce un<br />
aumento <strong>de</strong>l tiempo total <strong>de</strong>l movimiento que permite al sistema llevar a cabo las<br />
correcciones necesarias. El análisis <strong>de</strong>tallado <strong>de</strong> estos experimentos <strong>de</strong>muestra la<br />
dificultad <strong>de</strong> controlar únicamente el tamaño <strong>de</strong>l objeto (Paulignan y Jeannerod, 1996).<br />
Cuando se establecen esas condiciones como en Bootsma y colaboradores (1994), los<br />
resultados indican que la componente <strong>de</strong> transporte no queda afectada por el efecto <strong>de</strong><br />
variar el tamaño <strong>de</strong>l objeto.<br />
3.4.3 El control visual <strong>de</strong>l movimiento <strong>de</strong> agarre<br />
El papel <strong>de</strong> la visión en el guiado <strong>de</strong>l movimiento <strong>de</strong> agarre fue estudiado por<br />
Paulignan, Jeannerod y colaboradores., (1991b) y por Paulignan, MacKenzie y<br />
colaboradores (1991a) usando cilindros <strong>de</strong> diámetro variable como objetos a agarrar. El<br />
posicionamiento <strong>de</strong> los <strong>de</strong>dos alre<strong>de</strong>dor <strong>de</strong>l objeto no representa en sí mismo una gran<br />
restricción ya que existe un número casi ilimitado <strong>de</strong> posibilida<strong>de</strong>s a la hora <strong>de</strong><br />
posicionar los <strong>de</strong>dos en su contacto con el objeto. Aun así, estos investigadores<br />
8 La que se correspon<strong>de</strong>ría a la observada en un sujeto <strong>de</strong> control llevando a cabo el movimiento sin perturbar<br />
31


