Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ... Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
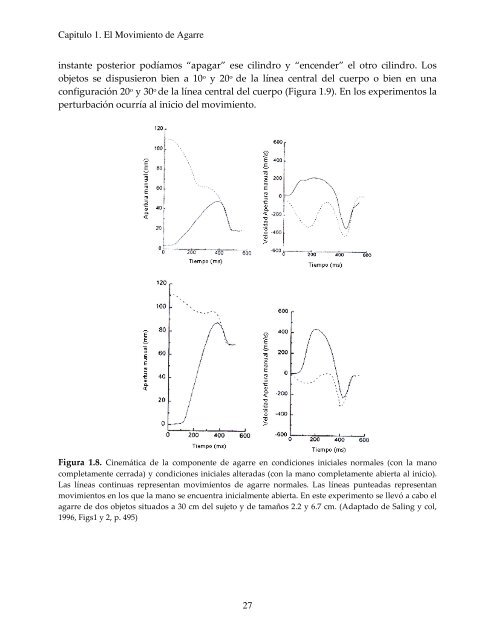
Capitulo 1. El Movimiento de Agarre instante posterior podíamos “apagar” ese cilindro y “encender” el otro cilindro. Los objetos se dispusieron bien a 10 o y 20 o de la línea central del cuerpo o bien en una configuración 20 o y 30 o de la línea central del cuerpo (Figura 1.9). En los experimentos la perturbación ocurría al inicio del movimiento. Figura 1.8. Cinemática de la componente de agarre en condiciones iniciales normales (con la mano completamente cerrada) y condiciones iniciales alteradas (con la mano completamente abierta al inicio). Las líneas continuas representan movimientos de agarre normales. Las líneas punteadas representan movimientos en los que la mano se encuentra inicialmente abierta. En este experimento se llevó a cabo el agarre de dos objetos situados a 30 cm del sujeto y de tamaños 2.2 y 6.7 cm. (Adaptado de Saling y col, 1996, Figs1 y 2, p. 495) 27
Capitulo 1. El Movimiento de Agarre Figura 1.9. Diagrama esquemático del montaje experimental para estudiar el efecto de las variaciones abruptas en la posición del objeto durante la ejecución del movimiento llevadas a cabo por Paulignan y colaboradores., 1991a. Contrariamente a lo esperado, tanto las componentes de transporte y apertura fueron afectadas por la perturbación (Figura 1.10). En dichos experimentos, el perfil de velocidad de la muñeca presenta un doble pico. El segundo pico de velocidad, de menor amplitud al primero se correlaciona con la reorientación de la mano hacia la posición del nuevo objetivo. Tanto en estas experiencias como en las llevadas a cabo por Gentilucci y colaboradores (1992) aparecieron perfiles de apertura manual con un doble pico 6 . En las experiencias donde se apreció este doble pico (un 80 % en el caso de Paulignan y colaboradores 1990,1991a), se observa que la MGA alcanzada durante el movimiento es la misma a la encontrada en un movimiento normal sin perturbar, es decir, si se entiende que el canal de agarre se encarga de establecer posturas adecuadas para el agarre, debe concluirse que la perturbación en la posición del objeto no afecta a la componente de transporte. El hecho de que aparezcan dos picos en el patrón de apertura manual, hizo que Gentilucci y colaboradores (1992) propusieran que la presentación de dos objetos en la experiencia implica la existencia de dos programas motores distintos. Ya que estos dos programas motores se ejecutan de manera sucesiva, según estos autores, no es descabellado pensar que el programa motor relacionado con el primer agarre se vea interrumpido, y el movimiento sea reprogramado a través del segundo programa motor. Con estos datos, Paulignan y Jeannerod (1996), estiman que este tipo de experiencias no ofrecen ninguna base sólida para desechar la teoría de los canales visuomotores en el movimiento de agarre. 6 En algunos casos aparece simplemente un periodo de tiempo durante el cual la apertura manual no varía, en otros casos se produce un pequeño periodo de cierre de los dedos y un a posterior apertura hasta el MGA. 28
- Page 1 and 2: Universidad Politécnica de Cartage
- Page 3 and 4: Neuro - Robotics constitutes an eme
- Page 5 and 6: The results of the research develop
- Page 7 and 8: Índice General Agradecimientos Int
- Page 9 and 10: 5.2 Simulaciones del modelo. Modeli
- Page 11 and 12: Introducción 1 Introducción Intro
- Page 13 and 14: Introducción la hora de inspirar m
- Page 15 and 16: Introducción 1. Análisis experime
- Page 17 and 18: Introducción 3.7 Transferencia tec
- Page 19 and 20: Introducción presentan objetos de
- Page 21 and 22: Capitulo 1. El Movimiento de Agarre
- Page 23 and 24: Capitulo 1. El Movimiento de Agarre
- Page 25 and 26: Capitulo 1. El Movimiento de Agarre
- Page 27 and 28: Capitulo 1. El Movimiento de Agarre
- Page 29 and 30: Capitulo 1. El Movimiento de Agarre
- Page 31 and 32: Capitulo 1. El Movimiento de Agarre
- Page 33 and 34: Capitulo 1. El Movimiento de Agarre
- Page 35: Capitulo 1. El Movimiento de Agarre
- Page 39 and 40: Capitulo 1. El Movimiento de Agarre
- Page 41 and 42: Capitulo 1. El Movimiento de Agarre
- Page 43 and 44: Capitulo 1. El Movimiento de Agarre
- Page 45 and 46: Capitulo 1. El Movimiento de Agarre
- Page 47 and 48: Capitulo 1. El Movimiento de Agarre
- Page 49 and 50: Capitulo 1. El Movimiento de Agarre
- Page 51 and 52: Capitulo 1. El Movimiento de Agarre
- Page 53 and 54: Capitulo 2. Modelos Computacionales
- Page 55 and 56: Capitulo 2. Modelos Computacionales
- Page 57 and 58: Capitulo 2. Modelos Computacionales
- Page 59 and 60: Capitulo 2. Modelos Computacionales
- Page 61 and 62: Capitulo 2. Modelos Computacionales
- Page 63 and 64: Capitulo 2. Modelos Computacionales
- Page 65 and 66: Capitulo 2. Modelos Computacionales
- Page 67 and 68: Capitulo 2. Modelos Computacionales
- Page 69 and 70: Capitulo 2. Modelos Computacionales
- Page 71 and 72: Capitulo 2. Modelos Computacionales
- Page 73 and 74: Capitulo 2. Modelos Computacionales
- Page 75 and 76: Capitulo 2. Modelos Computacionales
- Page 77 and 78: Capitulo 2. Modelos Computacionales
- Page 79 and 80: Capitulo 2. Modelos Computacionales
- Page 81 and 82: Capitulo 2. Modelos Computacionales
- Page 83 and 84: Capitulo 2. Modelos Computacionales
- Page 85 and 86: Capitulo 2. Modelos Computacionales
Capitulo 1. El Movimiento <strong>de</strong> Agarre<br />
instante posterior podíamos “apagar” ese cilindro y “encen<strong>de</strong>r” el otro cilindro. Los<br />
objetos se dispusieron bien a 10 o y 20 o <strong>de</strong> la línea central <strong>de</strong>l cuerpo o bien en una<br />
configuración 20 o y 30 o <strong>de</strong> la línea central <strong>de</strong>l cuerpo (Figura 1.9). En los experimentos la<br />
perturbación ocurría al inicio <strong>de</strong>l movimiento.<br />
Figura 1.8. Cinemática <strong>de</strong> la componente <strong>de</strong> agarre en condiciones iniciales normales (con la mano<br />
completamente cerrada) y condiciones iniciales alteradas (con la mano completamente abierta al inicio).<br />
Las líneas continuas representan movimientos <strong>de</strong> agarre normales. Las líneas punteadas representan<br />
movimientos en los que la mano se encuentra inicialmente abierta. En este experimento se llevó a cabo el<br />
agarre <strong>de</strong> dos objetos situados a 30 cm <strong>de</strong>l sujeto y <strong>de</strong> tamaños 2.2 y 6.7 cm. (Adaptado <strong>de</strong> Saling y col,<br />
1996, Figs1 y 2, p. 495)<br />
27


