Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ... Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
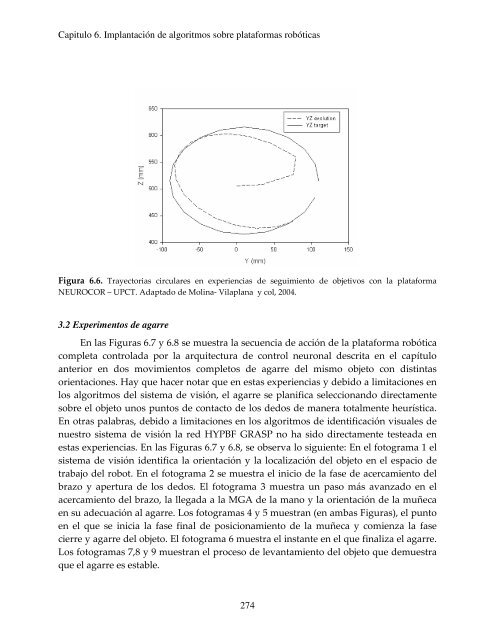
Capitulo 6. Implantación de algoritmos sobre plataformas robóticas Figura 6.6. Trayectorias circulares en experiencias de seguimiento de objetivos con la plataforma NEUROCOR – UPCT. Adaptado de Molina- Vilaplana y col, 2004. 3.2 Experimentos de agarre En las Figuras 6.7 y 6.8 se muestra la secuencia de acción de la plataforma robótica completa controlada por la arquitectura de control neuronal descrita en el capítulo anterior en dos movimientos completos de agarre del mismo objeto con distintas orientaciones. Hay que hacer notar que en estas experiencias y debido a limitaciones en los algoritmos del sistema de visión, el agarre se planifica seleccionando directamente sobre el objeto unos puntos de contacto de los dedos de manera totalmente heurística. En otras palabras, debido a limitaciones en los algoritmos de identificación visuales de nuestro sistema de visión la red HYPBF GRASP no ha sido directamente testeada en estas experiencias. En las Figuras 6.7 y 6.8, se observa lo siguiente: En el fotograma 1 el sistema de visión identifica la orientación y la localización del objeto en el espacio de trabajo del robot. En el fotograma 2 se muestra el inicio de la fase de acercamiento del brazo y apertura de los dedos. El fotograma 3 muestra un paso más avanzado en el acercamiento del brazo, la llegada a la MGA de la mano y la orientación de la muñeca en su adecuación al agarre. Los fotogramas 4 y 5 muestran (en ambas Figuras), el punto en el que se inicia la fase final de posicionamiento de la muñeca y comienza la fase cierre y agarre del objeto. El fotograma 6 muestra el instante en el que finaliza el agarre. Los fotogramas 7,8 y 9 muestran el proceso de levantamiento del objeto que demuestra que el agarre es estable. 274
Capitulo 6. Implantación de algoritmos sobre plataformas robóticas 1 2 3 4 5 6 7 8 9 Figura 6.7. Secuencia de una experiencia de agarre con la plataforma NEUROCOR – UPCT 275
- Page 225 and 226: Capitulo 5. Modelo Neuronal para el
- Page 227 and 228: Capitulo 5. Modelo Neuronal para el
- Page 229 and 230: Capitulo 5. Modelo Neuronal para el
- Page 231 and 232: Capitulo 5. Modelo Neuronal para el
- Page 233 and 234: Capitulo 5. Modelo Neuronal para el
- Page 235 and 236: Capitulo 5. Modelo Neuronal para el
- Page 237 and 238: Capitulo 5. Modelo Neuronal para el
- Page 239 and 240: Capitulo 5. Modelo Neuronal para el
- Page 241 and 242: Capitulo 5. Modelo Neuronal para el
- Page 243 and 244: Capitulo 5. Modelo Neuronal para el
- Page 245 and 246: Capitulo 5. Modelo Neuronal para el
- Page 247 and 248: Capitulo 5. Modelo Neuronal para el
- Page 249 and 250: 2.5 cm 3.0 cm 3.5 cm 2 cm Capitulo
- Page 251 and 252: Capitulo 5. Modelo Neuronal para el
- Page 253 and 254: Capitulo 5. Modelo Neuronal para el
- Page 255 and 256: Capitulo 5. Modelo Neuronal para el
- Page 257 and 258: Capitulo 5. Modelo Neuronal para el
- Page 259 and 260: Capitulo 5. Modelo Neuronal para el
- Page 261 and 262: Capitulo 5. Modelo Neuronal para el
- Page 263 and 264: Capitulo 5. Modelo Neuronal para el
- Page 265 and 266: R1 HYPBF # 1 HYPBF # 2 R2 AIP VD Mu
- Page 267 and 268: Capitulo 5. Modelo Neuronal para el
- Page 269 and 270: Capitulo 6. Implantación de algori
- Page 271 and 272: Capitulo 6. Implantación de algori
- Page 273 and 274: Capitulo 6. Implantación de algori
- Page 275: Capitulo 6. Implantación de algori
- Page 279 and 280: Capitulo 6. Implantación de algori
- Page 281 and 282: Capitulo 6. Implantación de algori
- Page 283 and 284: Capitulo 7. Conclusiones y Trabajos
- Page 285 and 286: Capitulo 7. Conclusiones y Trabajos
- Page 287 and 288: 1. Cinemática Directa del brazo ma
- Page 289 and 290: x 0 l 3 I -M c l 2 z 0 l 1 d θ 4 b
- Page 291 and 292: Los pesos adaptativos wijk y zijkm
- Page 293 and 294: Arbib, M.A. (1985a). Schemas for th
- Page 295 and 296: Castiello, U., Stelmach, G.E., Lieb
- Page 297 and 298: Fagg, A.H., Arbib, M.A. (1998). Mod
- Page 299 and 300: Graybiel, A.M. (1997). The basal ga
- Page 301 and 302: Jaeger, D., Kita, H., Wilson., C.J.
- Page 303 and 304: Kimura, M., Matsumoto, N., Okahashi
- Page 305 and 306: Mottet, D., Bootsma, R. J. (2001).
- Page 307 and 308: Rezzoug, N., Gorce, P. (2001). A Ne
- Page 309 and 310: Tanee, J., Boussaoud, D., Boyer-Zel
Capitulo 6. Implantación <strong>de</strong> algoritmos sobre plataformas robóticas<br />
Figura 6.6. Trayectorias circulares en experiencias <strong>de</strong> seguimiento <strong>de</strong> objetivos con la plataforma<br />
NEUROCOR – UPCT. Adaptado <strong>de</strong> Molina- Vilaplana y col, 2004.<br />
3.2 Experimentos <strong>de</strong> agarre<br />
En las Figuras 6.7 y 6.8 se muestra la secuencia <strong>de</strong> acción <strong>de</strong> la plataforma robótica<br />
completa controlada por la arquitectura <strong>de</strong> control neuronal <strong>de</strong>scrita en el capítulo<br />
anterior en dos movimientos completos <strong>de</strong> agarre <strong>de</strong>l mismo objeto con distintas<br />
orientaciones. Hay que hacer notar que en estas experiencias y <strong>de</strong>bido a limitaciones en<br />
los algoritmos <strong>de</strong>l sistema <strong>de</strong> visión, el agarre se planifica seleccionando directamente<br />
sobre el objeto unos puntos <strong>de</strong> contacto <strong>de</strong> los <strong>de</strong>dos <strong>de</strong> manera totalmente heurística.<br />
En otras palabras, <strong>de</strong>bido a limitaciones en los algoritmos <strong>de</strong> i<strong>de</strong>ntificación visuales <strong>de</strong><br />
nuestro sistema <strong>de</strong> visión la red HYPBF GRASP no ha sido directamente testeada en<br />
estas experiencias. En las Figuras 6.7 y 6.8, se observa lo siguiente: En el fotograma 1 el<br />
sistema <strong>de</strong> visión i<strong>de</strong>ntifica la orientación y la localización <strong>de</strong>l objeto en el espacio <strong>de</strong><br />
trabajo <strong>de</strong>l robot. En el fotograma 2 se muestra el inicio <strong>de</strong> la fase <strong>de</strong> acercamiento <strong>de</strong>l<br />
brazo y apertura <strong>de</strong> los <strong>de</strong>dos. El fotograma 3 muestra un paso más avanzado en el<br />
acercamiento <strong>de</strong>l brazo, la llegada a la MGA <strong>de</strong> la mano y la orientación <strong>de</strong> la muñeca<br />
en su a<strong>de</strong>cuación al agarre. Los fotogramas 4 y 5 muestran (en ambas Figuras), el punto<br />
en el que se inicia la fase final <strong>de</strong> posicionamiento <strong>de</strong> la muñeca y comienza la fase<br />
cierre y agarre <strong>de</strong>l objeto. El fotograma 6 muestra el instante en el que finaliza el agarre.<br />
Los fotogramas 7,8 y 9 muestran el proceso <strong>de</strong> levantamiento <strong>de</strong>l objeto que <strong>de</strong>muestra<br />
que el agarre es estable.<br />
274


