Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ... Universidad Politécnica de Cartagena TESIS DOCTORAL “UNA ...
Capitulo 5. Modelo Neuronal para el aprendizaje progresivo de tareas de Agarre Neurona # 17 Neurona # 16 Actividad Neuronal A ctividad N euronal 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0 2,0 3,0 4,0 5,0 6,0 4,0 5,0 6,0 2,0 3,0 4,0 5,0 6,0 4,0 5,0 6,0 2,0 3,0 4,0 5,0 6,0 4,0 5,0 6,0 2 ,0 3 ,0 4 ,0 5 ,0 6 ,0 4 ,0 5 ,0 6 ,0 2 ,0 3 ,0 4 ,0 5 ,0 6 ,0 4 ,0 5 ,0 6 ,0 2 ,0 3 ,0 4 ,0 5 ,0 6 ,0 4 ,0 5 ,0 6 ,0 2d 3d 2d 3d 2d 3d Figura 5.31. Patrón de actividad de las neuronas #16 y #16 de la capa oculta de GRASP. Este perfil se corresponde con un comportamiento de tipo ’neurona visuomotora’. 4.3 Generación de movimientos completos agarre. Se han generado movimientos completos de agarre a través del modelo desarrollado en este Capítulo unido a los mecanismos de coordinación espacio temporal empleados en modelos presentados en capítulos anteriores. La generación de estos movimientos implica la acción coordinada de los módulos HYPBF de alcance y de agarre expuestos en secciones anteriores (Figura 5.32). 253
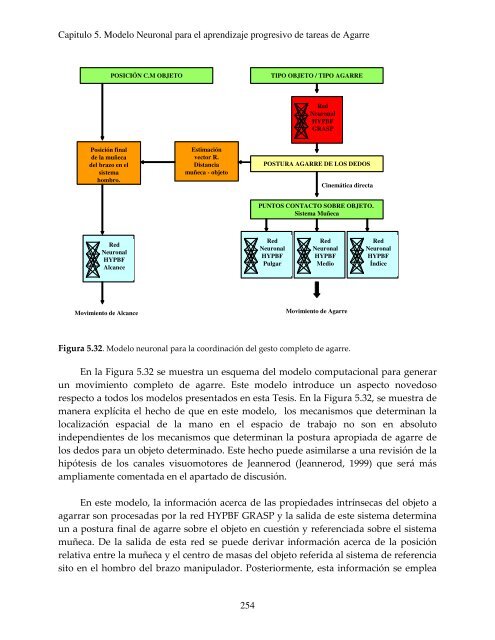
Capitulo 5. Modelo Neuronal para el aprendizaje progresivo de tareas de Agarre Posición final de la muñeca del brazo en el sistema hombro. Red Neuronal HYPBF Alcance Movimiento de Alcance POSICIÓN C.M OBJETO Estimación vector R. Distancia muñeca - objeto 254 TIPO OBJETO / TIPO AGARRE Red Neuronal HYPBF Pulgar Red Neuronal HYPBF GRASP POSTURA AGARRE DE LOS DEDOS Cinemática directa PUNTOS CONTACTO SOBRE OBJETO. Sistema Muñeca Red Neuronal HYPBF Medio Movimiento de Agarre Figura 5.32. Modelo neuronal para la coordinación del gesto completo de agarre. Red Neuronal HYPBF Índice En la Figura 5.32 se muestra un esquema del modelo computacional para generar un movimiento completo de agarre. Este modelo introduce un aspecto novedoso respecto a todos los modelos presentados en esta Tesis. En la Figura 5.32, se muestra de manera explícita el hecho de que en este modelo, los mecanismos que determinan la localización espacial de la mano en el espacio de trabajo no son en absoluto independientes de los mecanismos que determinan la postura apropiada de agarre de los dedos para un objeto determinado. Este hecho puede asimilarse a una revisión de la hipótesis de los canales visuomotores de Jeannerod (Jeannerod, 1999) que será más ampliamente comentada en el apartado de discusión. En este modelo, la información acerca de las propiedades intrínsecas del objeto a agarrar son procesadas por la red HYPBF GRASP y la salida de este sistema determina un a postura final de agarre sobre el objeto en cuestión y referenciada sobre el sistema muñeca. De la salida de esta red se puede derivar información acerca de la posición relativa entre la muñeca y el centro de masas del objeto referida al sistema de referencia sito en el hombro del brazo manipulador. Posteriormente, esta información se emplea
- Page 205 and 206: Capitulo 4. Modelo Neuronal para la
- Page 207 and 208: Capitulo 4. Modelo Neuronal para la
- Page 209 and 210: Capitulo 4. Modelo Neuronal para la
- Page 211 and 212: Capitulo 5. Modelo Neuronal para el
- Page 213 and 214: Capitulo 5. Modelo Neuronal para el
- Page 215 and 216: Capitulo 5. Modelo Neuronal para el
- Page 217 and 218: Capitulo 5. Modelo Neuronal para el
- Page 219 and 220: Capitulo 5. Modelo Neuronal para el
- Page 221 and 222: Capitulo 5. Modelo Neuronal para el
- Page 223 and 224: Capitulo 5. Modelo Neuronal para el
- Page 225 and 226: Capitulo 5. Modelo Neuronal para el
- Page 227 and 228: Capitulo 5. Modelo Neuronal para el
- Page 229 and 230: Capitulo 5. Modelo Neuronal para el
- Page 231 and 232: Capitulo 5. Modelo Neuronal para el
- Page 233 and 234: Capitulo 5. Modelo Neuronal para el
- Page 235 and 236: Capitulo 5. Modelo Neuronal para el
- Page 237 and 238: Capitulo 5. Modelo Neuronal para el
- Page 239 and 240: Capitulo 5. Modelo Neuronal para el
- Page 241 and 242: Capitulo 5. Modelo Neuronal para el
- Page 243 and 244: Capitulo 5. Modelo Neuronal para el
- Page 245 and 246: Capitulo 5. Modelo Neuronal para el
- Page 247 and 248: Capitulo 5. Modelo Neuronal para el
- Page 249 and 250: 2.5 cm 3.0 cm 3.5 cm 2 cm Capitulo
- Page 251 and 252: Capitulo 5. Modelo Neuronal para el
- Page 253 and 254: Capitulo 5. Modelo Neuronal para el
- Page 255: Capitulo 5. Modelo Neuronal para el
- Page 259 and 260: Capitulo 5. Modelo Neuronal para el
- Page 261 and 262: Capitulo 5. Modelo Neuronal para el
- Page 263 and 264: Capitulo 5. Modelo Neuronal para el
- Page 265 and 266: R1 HYPBF # 1 HYPBF # 2 R2 AIP VD Mu
- Page 267 and 268: Capitulo 5. Modelo Neuronal para el
- Page 269 and 270: Capitulo 6. Implantación de algori
- Page 271 and 272: Capitulo 6. Implantación de algori
- Page 273 and 274: Capitulo 6. Implantación de algori
- Page 275 and 276: Capitulo 6. Implantación de algori
- Page 277 and 278: Capitulo 6. Implantación de algori
- Page 279 and 280: Capitulo 6. Implantación de algori
- Page 281 and 282: Capitulo 6. Implantación de algori
- Page 283 and 284: Capitulo 7. Conclusiones y Trabajos
- Page 285 and 286: Capitulo 7. Conclusiones y Trabajos
- Page 287 and 288: 1. Cinemática Directa del brazo ma
- Page 289 and 290: x 0 l 3 I -M c l 2 z 0 l 1 d θ 4 b
- Page 291 and 292: Los pesos adaptativos wijk y zijkm
- Page 293 and 294: Arbib, M.A. (1985a). Schemas for th
- Page 295 and 296: Castiello, U., Stelmach, G.E., Lieb
- Page 297 and 298: Fagg, A.H., Arbib, M.A. (1998). Mod
- Page 299 and 300: Graybiel, A.M. (1997). The basal ga
- Page 301 and 302: Jaeger, D., Kita, H., Wilson., C.J.
- Page 303 and 304: Kimura, M., Matsumoto, N., Okahashi
- Page 305 and 306: Mottet, D., Bootsma, R. J. (2001).
Capitulo 5. Mo<strong>de</strong>lo Neuronal para el aprendizaje progresivo <strong>de</strong> tareas <strong>de</strong> Agarre<br />
Posición final<br />
<strong>de</strong> la muñeca<br />
<strong>de</strong>l brazo en el<br />
sistema<br />
hombro.<br />
Red<br />
Neuronal<br />
HYPBF<br />
Alcance<br />
Movimiento <strong>de</strong> Alcance<br />
POSICIÓN C.M OBJETO<br />
Estimación<br />
vector R.<br />
Distancia<br />
muñeca - objeto<br />
254<br />
TIPO OBJETO / TIPO AGARRE<br />
Red<br />
Neuronal<br />
HYPBF<br />
Pulgar<br />
Red<br />
Neuronal<br />
HYPBF<br />
GRASP<br />
POSTURA AGARRE DE LOS DEDOS<br />
Cinemática directa<br />
PUNTOS CONTACTO SOBRE OBJETO.<br />
Sistema Muñeca<br />
Red<br />
Neuronal<br />
HYPBF<br />
Medio<br />
Movimiento <strong>de</strong> Agarre<br />
Figura 5.32. Mo<strong>de</strong>lo neuronal para la coordinación <strong>de</strong>l gesto completo <strong>de</strong> agarre.<br />
Red<br />
Neuronal<br />
HYPBF<br />
Índice<br />
En la Figura 5.32 se muestra un esquema <strong>de</strong>l mo<strong>de</strong>lo computacional para generar<br />
un movimiento completo <strong>de</strong> agarre. Este mo<strong>de</strong>lo introduce un aspecto novedoso<br />
respecto a todos los mo<strong>de</strong>los presentados en esta Tesis. En la Figura 5.32, se muestra <strong>de</strong><br />
manera explícita el hecho <strong>de</strong> que en este mo<strong>de</strong>lo, los mecanismos que <strong>de</strong>terminan la<br />
localización espacial <strong>de</strong> la mano en el espacio <strong>de</strong> trabajo no son en absoluto<br />
in<strong>de</strong>pendientes <strong>de</strong> los mecanismos que <strong>de</strong>terminan la postura apropiada <strong>de</strong> agarre <strong>de</strong><br />
los <strong>de</strong>dos para un objeto <strong>de</strong>terminado. Este hecho pue<strong>de</strong> asimilarse a una revisión <strong>de</strong> la<br />
hipótesis <strong>de</strong> los canales visuomotores <strong>de</strong> Jeannerod (Jeannerod, 1999) que será más<br />
ampliamente comentada en el apartado <strong>de</strong> discusión.<br />
En este mo<strong>de</strong>lo, la información acerca <strong>de</strong> las propieda<strong>de</strong>s intrínsecas <strong>de</strong>l objeto a<br />
agarrar son procesadas por la red HYPBF GRASP y la salida <strong>de</strong> este sistema <strong>de</strong>termina<br />
un a postura final <strong>de</strong> agarre sobre el objeto en cuestión y referenciada sobre el sistema<br />
muñeca. De la salida <strong>de</strong> esta red se pue<strong>de</strong> <strong>de</strong>rivar información acerca <strong>de</strong> la posición<br />
relativa entre la muñeca y el centro <strong>de</strong> masas <strong>de</strong>l objeto referida al sistema <strong>de</strong> referencia<br />
sito en el hombro <strong>de</strong>l brazo manipulador. Posteriormente, esta información se emplea


