TRANSFORMADA DE LAPLACE Estudiamos en este capítulo la ...
TRANSFORMADA DE LAPLACE Estudiamos en este capítulo la ...
TRANSFORMADA DE LAPLACE Estudiamos en este capítulo la ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong><br />
EDUARDO MARTÍNEZ<br />
<strong>Estudiamos</strong> <strong>en</strong> <strong>este</strong> <strong>capítulo</strong> <strong>la</strong> transformación de Lap<strong>la</strong>ce, que es un método para<br />
asociar a una functión f otra función F distinta, l<strong>la</strong>mada transformada de Lap<strong>la</strong>ce<br />
de f. Una de sus principales virtudes es que transforma ecuaciones difer<strong>en</strong>ciales<br />
lineales <strong>en</strong> ecuaciones algebraicas, por tanto fáciles de resolver. Una vez resuelta<br />
dicha ecuación algebraica se hal<strong>la</strong>rá <strong>la</strong> antitransformada obt<strong>en</strong>i<strong>en</strong>dose <strong>la</strong> solución<br />
de <strong>la</strong> ecuación difer<strong>en</strong>cial.<br />
La transformada de Lap<strong>la</strong>ce de una función f vi<strong>en</strong>e dada por medio de una<br />
integral impropia dep<strong>en</strong>di<strong>en</strong>te de un parámetro (<strong>la</strong> variable de <strong>la</strong> cual dep<strong>en</strong>de <strong>la</strong><br />
función F ), por lo cual <strong>la</strong> teoría está ll<strong>en</strong>a de complicaciones técnicas. Por esta<br />
razón, y t<strong>en</strong>i<strong>en</strong>do <strong>en</strong> cu<strong>en</strong>ta <strong>la</strong>s aplicaciones de <strong>la</strong> teoría que necesitamos, podemos<br />
restringirnos a una c<strong>la</strong>se de funciones s<strong>en</strong>cil<strong>la</strong>s, <strong>la</strong>s funciones de ord<strong>en</strong> expon<strong>en</strong>cial.<br />
En principio, y dado que <strong>la</strong>s soluciones de ecuaciones difer<strong>en</strong>ciales lineales con<br />
coefici<strong>en</strong>tes constantes son funciones continuas, podríamos restringirnos a funciones<br />
continuas. Sin embargo, nos interesa estudiar ecuaciones con impulsos, que como<br />
vimos, hac<strong>en</strong> que <strong>la</strong> solución cambie bruscam<strong>en</strong>te y sea discontinua. Es por esto<br />
por lo que trataremos funciones continuas a trozos.<br />
1. Transformada de Lap<strong>la</strong>ce<br />
Consideremos el conjunto Ω formado por <strong>la</strong>s funciones de una variable real t<br />
con valores <strong>en</strong> C cuyo dominio conti<strong>en</strong>e los reales positivos y un <strong>en</strong>torno del cero<br />
y son continuas a trozos (es decir, <strong>la</strong>s discontinuidades de <strong>la</strong> función son de salto<br />
finito y el conjunto de puntos de discontinuidad no ti<strong>en</strong>e puntos de acumu<strong>la</strong>ción<br />
finitos, o lo que es lo mismo, <strong>en</strong> cada intervalo compacto hay un número finito de<br />
discontinuidades de salto finito).<br />
A todos los efectos se considerarán como iguales dos funciones continuas a trozos<br />
que coincidan <strong>en</strong> [0, ∞) salvo <strong>en</strong> sus puntos de discontinuidad. Si se prefiere,<br />
podemos trabajar con c<strong>la</strong>ses de equival<strong>en</strong>cia de funciones que coincid<strong>en</strong> salvo <strong>en</strong><br />
un conjunto sin puntos de acumu<strong>la</strong>ción finito. En consecu<strong>en</strong>cia, <strong>en</strong> un punto de<br />
discontinuidad, no ti<strong>en</strong>e s<strong>en</strong>tido hab<strong>la</strong>r de f(a) sino de f(a + ) y f(a−).<br />
Definición 1.1: Dada una función f ∈ Ω l<strong>la</strong>mamos transformada de Lap<strong>la</strong>ce<br />
de f a <strong>la</strong> función F definida por<br />
� ∞<br />
F (s) = f(t)e −st dt.<br />
Se utiliza frecu<strong>en</strong>tem<strong>en</strong>te <strong>la</strong> notación F = L(f) o también L(f(t)) = F (s).<br />
0<br />
Evid<strong>en</strong>tem<strong>en</strong>te, el dominio de <strong>la</strong> función F es el campo de converg<strong>en</strong>cia de <strong>la</strong><br />
integral anterior. Nótese que F es una función compleja de variable real.<br />
Ejemplo 1.2: Consideremos <strong>la</strong> función f(t) = 1, es decir f(t) = 1 · H(t) =H(t).<br />
Su transformada de Lap<strong>la</strong>ce es<br />
� ∞<br />
F (s) = 1e −st dt<br />
0<br />
Para hal<strong>la</strong>r <strong>la</strong> integral anterior debemos distinguir varios casos según el valor de s.<br />
1
2 EDUARDO MARTÍNEZ<br />
• Si s =0,<br />
� ∞<br />
F (0) = 1e 0 � ∞<br />
dt = 1 dt = ∞.<br />
• Si s>0,<br />
� ∞<br />
F (s) = 1e −st dt = − 1<br />
s e−st<br />
�<br />
�<br />
• Si sγ, <strong>en</strong>tonces e −st ≤ e −γt , para todo t ≥ 0, de donde<br />
� ∞<br />
|f(t)e −st � ∞<br />
| dt ≤ |f(t)e −γt | dt.<br />
0<br />
Como <strong>la</strong> integral de <strong>la</strong> derecha converge, <strong>la</strong> integral de <strong>la</strong> izquierda también. �<br />
Nótese que hay funciones para <strong>la</strong>s que el campo de converg<strong>en</strong>cia de <strong>la</strong> integral<br />
es vacio. Por ejemplo, si f(t) = et2 <strong>en</strong>tonces <strong>la</strong> integral � ∞<br />
0 et2 −st es diverg<strong>en</strong>te<br />
cualquiera que sea el valor de s ∈ R.<br />
Una c<strong>la</strong>se de funciones interesantes para nuestros propósitos es <strong>la</strong> de <strong>la</strong>s funciones<br />
de ord<strong>en</strong> expon<strong>en</strong>cial.<br />
Definición 1.5: Una función f ∈ Ω es de ord<strong>en</strong> expon<strong>en</strong>cial si exist<strong>en</strong> unas<br />
constantes K, γ y T tales que<br />
|f(t)| ≤ K e γt<br />
0<br />
para todo t ≥ T .<br />
Ejemplos de funciones de ord<strong>en</strong> expon<strong>en</strong>cial son <strong>la</strong>s funciones acotadas (<strong>en</strong> <strong>la</strong>s<br />
que se puede tomar γ =0), <strong>la</strong>s funciones polinómicas (<strong>en</strong> <strong>la</strong>s que se puede tomar<br />
cualquier valor negativo para γ) o el producto de un polinomio por una expon<strong>en</strong>cial.<br />
En particu<strong>la</strong>r, <strong>la</strong>s soluciones de ecuaciones difer<strong>en</strong>ciales homogéneas de ord<strong>en</strong> n<br />
con coefici<strong>en</strong>tes constantes o <strong>la</strong>s soluciones de sistemas lineales con coefici<strong>en</strong>tes<br />
constantes son funciones de ord<strong>en</strong> expon<strong>en</strong>cial.<br />
Proposición 1.6: Si f es de ord<strong>en</strong> expon<strong>en</strong>cial con constante γ, <strong>en</strong>tonces su transformada<br />
de Lap<strong>la</strong>ce F está definida (al m<strong>en</strong>os) <strong>en</strong> el intervalo (γ, +∞).<br />
Dem. Probaremos que <strong>la</strong> integral que define <strong>la</strong> transformada de f es absolutam<strong>en</strong>te<br />
converg<strong>en</strong>te <strong>en</strong> dicho intervalo. En efecto, para s>γ,<br />
� ∞<br />
|f(t)e −st � ∞<br />
| dt ≤ K e (γ−s)t dt = K 1<br />
s − γ ,<br />
0<br />
0<br />
y por tanto converge. �
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 3<br />
Transformada de una delta de Dirac. La transformada de Lap<strong>la</strong>ce se puede definir<br />
también para expresiones que conti<strong>en</strong><strong>en</strong> deltas de Dirac. Para que <strong>la</strong>s reg<strong>la</strong>s dadas<br />
anteriorm<strong>en</strong>te sean válidas, hay que tomar algunas precauciones. La definición de<br />
<strong>la</strong> transformada de f se debe cambiar a<br />
� ∞<br />
F (s) = f(t)e −st dt = lim<br />
α→0− � ∞<br />
f(t)e −st dt.<br />
0 −<br />
Esto se hace para evitar problemas con <strong>la</strong>s deltas de Dirac posicionadas <strong>en</strong> t =0,<br />
de forma que se puedan resolver problemas de valor inicial de forma correcta y<br />
automática. Con esta definición, podemos hal<strong>la</strong>r fácilm<strong>en</strong>te <strong>la</strong> transformada de<br />
Lap<strong>la</strong>ce de δ(t − a), con a ∈ R.<br />
Para a>0, se obti<strong>en</strong>e<br />
� ∞<br />
L(δ(t − a)) =<br />
0 −<br />
0 −<br />
α<br />
δ(t − a)e −st dt = lim<br />
α→0 − e−as =e −as .<br />
Para a =0, es decir, <strong>la</strong> transformada de Lap<strong>la</strong>ce de δ(t) es<br />
� ∞<br />
δ(t)e −st dt = lim<br />
α→0− � ∞<br />
δ(t)e −st dt = lim 1 = 1.<br />
α→0− Para a
4 EDUARDO MARTÍNEZ<br />
Esta reg<strong>la</strong> nos permite hal<strong>la</strong>r <strong>la</strong> transformada de algunas funciones s<strong>en</strong>cil<strong>la</strong>s. Por<br />
ejemplo, para el cos<strong>en</strong>o hiperbólico t<strong>en</strong>emos<br />
� �<br />
ωt −ωt e +e<br />
L(cosh(ωt)) = L<br />
2<br />
= 1 � �<br />
ωt −ωt<br />
L(e )+L(e )<br />
2<br />
= 1<br />
� �<br />
1 1<br />
+<br />
2 s − ω s + ω<br />
s<br />
=<br />
s2 .<br />
− ω2 Con un razonami<strong>en</strong>to simi<strong>la</strong>r obt<strong>en</strong>emos que <strong>la</strong> transformada de <strong>la</strong> función s<strong>en</strong>o<br />
hiperbólico es<br />
ω<br />
L(sinh(ωt)) =<br />
s2 .<br />
− ω2 Para funciones con valores complejos, podemos hal<strong>la</strong>r <strong>la</strong>s partes real e imaginaria<br />
por separado, como muestra el sigui<strong>en</strong>te resultado cuya demostración se propone<br />
como ejercicio.<br />
Proposición 2.2: Si f es una función compleja de variable real y ¯ f d<strong>en</strong>ota su<br />
compleja conjugada, <strong>en</strong>tonces<br />
Como consecu<strong>en</strong>cia<br />
L(f )=L(f)<br />
L(Re(f)) = Re(L(f)) y L(Im(f)) = Im(L(f)).<br />
Utilizando <strong>este</strong> hecho podemos hal<strong>la</strong>r <strong>la</strong> transformada de <strong>la</strong>s funciones s<strong>en</strong>o y<br />
cos<strong>en</strong>o. En efecto, de e iωt = cos(ωt) +i sin(ωt) t<strong>en</strong>emos que <strong>la</strong> parte real de <strong>la</strong><br />
transformada de e iωt es <strong>la</strong> transformada de sin(ωt), mi<strong>en</strong>tras que <strong>la</strong> parte imaginaria<br />
es <strong>la</strong> transformada de sin(ωt). La transformada de e iωt se hal<strong>la</strong> de <strong>la</strong> misma manera<br />
que hal<strong>la</strong>mos <strong>la</strong> transformada de e at para a real,<br />
L(e iωt )= 1<br />
s − iω<br />
Tomando <strong>la</strong>s parte real e imaginaria, obt<strong>en</strong>emos<br />
L(cos(ωt)) =<br />
s + iω<br />
=<br />
s2 .<br />
+ ω2 s<br />
s2 + ω2 ω<br />
y L(sin(ωt)) =<br />
s2 .<br />
+ ω2 Reg<strong>la</strong>s de transformación. Veamos ahora otras propiedades que nos facilitan el<br />
cálculo de transformadas y de anti-transformadas. En todas <strong>la</strong> reg<strong>la</strong>s que sigu<strong>en</strong>,<br />
f(t) es una función continua a trozos que ti<strong>en</strong>e transformada de Lap<strong>la</strong>ce F (s).<br />
Multiplicación por expon<strong>en</strong>ciales. La transformada de Lap<strong>la</strong>ce de eat f(t) es F (s −<br />
a). En efecto,<br />
L(e at � ∞<br />
f(t)) = e at f(t)e −st � ∞<br />
dt = f(t)e −(s−a)t dt = F (s − a).<br />
0<br />
Ejercicio 2.3: Utilizar <strong>la</strong> reg<strong>la</strong> anterior para hal<strong>la</strong>r <strong>la</strong> transformada de Lap<strong>la</strong>ce de<br />
f(t) =e αt sin(ωt) y de f(t) =e αt cos(ωt). Obt<strong>en</strong>er también dichas transformadas<br />
de otra manera. (Ayuda: e (α+iω)t )<br />
0
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 5<br />
f(t) F (s)<br />
1<br />
t n<br />
n!<br />
e at<br />
sin ωt<br />
cos ωt<br />
sinh ωt<br />
cosh ωt<br />
1<br />
s<br />
1<br />
s n+1<br />
1<br />
s − a<br />
ω<br />
s 2 + ω 2<br />
s<br />
s 2 + ω 2<br />
ω<br />
s 2 − ω 2<br />
s<br />
s 2 − ω 2<br />
δ(t − a) e −as<br />
Desp<strong>la</strong>zami<strong>en</strong>to. Si desp<strong>la</strong>zamos una función <strong>en</strong> una cantidad a>0, obt<strong>en</strong>emos <strong>la</strong><br />
función f(t − a)H(t − a). La transformada de esta función es e−as F (s). En efecto,<br />
t<strong>en</strong>i<strong>en</strong>do <strong>en</strong> cu<strong>en</strong>ta que H(t − a) = 0 para t < a y haci<strong>en</strong>do el cambio de variable<br />
¯t = t − a t<strong>en</strong>emos<br />
� ∞<br />
L(f(t − a)H(t − a)) = f(t − a)H(t − a)e<br />
0<br />
−st<br />
� ∞<br />
= f(t − a)e<br />
a<br />
−st dt<br />
� ∞<br />
= f(¯t)e<br />
0<br />
−s(a+¯t)<br />
d¯t<br />
=e −as<br />
� ∞<br />
f(¯t)e −s¯t<br />
d¯t<br />
0<br />
=e −as F (s).<br />
Transformada de una derivada. Si f tri<strong>en</strong>e transformada de Lap<strong>la</strong>ce F , <strong>en</strong>tonces<br />
su derivada f ′ ti<strong>en</strong>e transformada de Lap<strong>la</strong>ce y vale sF (s) − f(0− ). En efecto,<br />
integrando por partes u =e−st , dv = f ′ (t) dt, se obti<strong>en</strong>e<br />
L(f ′ � ∞<br />
(t)) =<br />
0<br />
f ′ (t)e −st dt =e −st f(t)<br />
0<br />
�<br />
�<br />
� ∞<br />
� ∞<br />
+ s<br />
−<br />
0<br />
f(t)e −st dt = −f(0 − )+sF (s),<br />
donde se ha t<strong>en</strong>ido <strong>en</strong> cu<strong>en</strong>ta que limt→∞ e −st f(t) = 0 ya que f ti<strong>en</strong>e transformada<br />
de Lap<strong>la</strong>ce, y donde se ha utilizado <strong>la</strong> reg<strong>la</strong> 0 ≡ 0 − , para el caso <strong>en</strong> que f t<strong>en</strong>ga<br />
una discontinuidad <strong>en</strong> t =0.
6 EDUARDO MARTÍNEZ<br />
Ejercicio 2.4: Demostrar por inducción que <strong>la</strong> transformada de Lap<strong>la</strong>ce de <strong>la</strong><br />
derivada n-ésima de f es<br />
L(f (n) (t)) = s n F (s) − [s n−1 f(0 − )+s n−2 f ′ (0 − )+· · · + sf (n−2) (0 − )+f (n−1) (0 − )].<br />
Transformada de una integral. De <strong>la</strong> reg<strong>la</strong> anterior se deduce que <strong>la</strong> transformada de<br />
Lap<strong>la</strong>ce de <strong>la</strong> integral � t<br />
f(τ) dτ (<strong>la</strong> primitiva de f que se anu<strong>la</strong> <strong>en</strong> t =0es F (s)/s.<br />
0<br />
En efecto, d<strong>en</strong>otando por g(t) a <strong>la</strong> integral anterior, se ti<strong>en</strong>e que g ′ (t) =f(t) y<br />
g(0) = 0, de donde<br />
F (s) =L(f(t)) = L(g ′ (t)) = sL(g(t)) − g(0) = sL(g(t)).<br />
Despejando se obti<strong>en</strong>e el resultado.<br />
Multiplicación por t. La transformada de Lap<strong>la</strong>ce de tf(t) es −F ′ (s). En efecto,<br />
derivando F (s) obt<strong>en</strong>emos<br />
F ′ � ∞<br />
(s) =<br />
0<br />
f(t) d<br />
ds e−st dt = −<br />
� ∞<br />
tf(t)e −st dt.<br />
Ejercicio 2.5: Demostrar por inducción que <strong>la</strong> transformada de Lap<strong>la</strong>ce de t n f(t)<br />
es<br />
L(t n f(t)) = (−1) n F (n) (s).<br />
Utilizando esta reg<strong>la</strong> demostrar que <strong>la</strong> transformada de Lap<strong>la</strong>ce de t n /n! es 1/s n+1 .<br />
División por t. La transformada de Lap<strong>la</strong>ce de f(t)/t es G(s) = � ∞<br />
F (σ) dσ. En<br />
s<br />
efecto, <strong>la</strong> derivada de G es −F (s), de donde, d<strong>en</strong>otando por g(t) a <strong>la</strong> función cuya<br />
transformada es G(s),<br />
L(f(t)) = F (s) =−G ′ (s) =L(tg(t)),<br />
de donde f(t) =tg(t).<br />
Transformada de una función periódica. Consideremos una función f periódica de<br />
periodo T , es decir, se satisface f(t + T )=f(t) para todo t ≥ 0. Dividi<strong>en</strong>do <strong>la</strong><br />
integral <strong>en</strong> intervalos de longitud T , y haci<strong>en</strong>do el cambio de variable ¯t = t − nT<br />
an cada una de el<strong>la</strong>s, se ti<strong>en</strong>e<br />
� ∞<br />
L(f(t)) = f(t)e −st<br />
=<br />
=<br />
=<br />
=<br />
=<br />
0<br />
∞�<br />
n=0<br />
� (n+1)T<br />
nT<br />
∞�<br />
� T<br />
n=0<br />
∞�<br />
n=0<br />
� ∞�<br />
n=0<br />
0<br />
−nsT )<br />
e<br />
1<br />
1 − e −sT<br />
0<br />
f(t)e −st dt<br />
f(¯t + nT )e −s(¯t+nT ) dt<br />
� T<br />
f(¯t)e −s¯t<br />
dt<br />
0<br />
(e −sT ) ) n<br />
� � T<br />
f(¯t)e −s¯t<br />
dt<br />
0<br />
� T<br />
f(¯t)e −s¯t<br />
dt,<br />
siempre que s>0 (para que <strong>la</strong> razón de <strong>la</strong> serie geométrica sea e−sT < 1).<br />
Producto de convolución. Recordamos que el producto de convolución de dos<br />
funciones f y g es <strong>la</strong> función f ∗ g definida por <strong>la</strong> integral<br />
� t<br />
(f ∗ g)(t) = f(t − τ)g(τ) dτ.<br />
0<br />
0
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 7<br />
Si f y g son continuas a trozos <strong>en</strong> el intervalo [0, ∞) y ti<strong>en</strong><strong>en</strong> transformada de<br />
Lap<strong>la</strong>ce F y G, respectivam<strong>en</strong>te, <strong>en</strong>tonces <strong>la</strong> transformada de Lap<strong>la</strong>ce del producto<br />
de convolución de f por g es el producto (ordinario) de <strong>la</strong>s sus transformadas, es<br />
decir,<br />
L(f ∗ g)(s) =F (s)G(s).<br />
Por cálculo directo, utilizando el teorema de intercambio de ord<strong>en</strong> de integración,<br />
t<strong>en</strong>emos<br />
� ∞<br />
L(f ∗ g)(s) = e<br />
0<br />
−st (f ∗ g)(t) dt<br />
� ∞<br />
= e<br />
0<br />
−st<br />
�� ∞<br />
�<br />
H(t − τ)f(t − τ)g(τ) dτ dt<br />
� ∞ � ∞<br />
0<br />
= e<br />
0 0<br />
−st H(t − τ)f(t − τ)g(τ) dt dτ<br />
� ∞ �� ∞<br />
= g(τ) e<br />
0<br />
0<br />
−st �<br />
H(t − τ)f(t − τ) dt dτ<br />
� ∞<br />
= g(τ)e<br />
0<br />
−sτ F (s) dτ<br />
� ∞<br />
= F (s) g(τ)e −sτ dτ<br />
0<br />
= F (s)G(s).<br />
donde se ha usado que <strong>la</strong> transformada de Lap<strong>la</strong>ce de H(t−τ)f(t−τ) es e −sτ F (s).<br />
3. Transformada inversa<br />
Nos preguntamos <strong>en</strong> esta sección por <strong>la</strong> posibilidad de que dos funciones distintas<br />
t<strong>en</strong>gan <strong>la</strong> misma transformada de Lap<strong>la</strong>ce. T<strong>en</strong>i<strong>en</strong>do <strong>en</strong> cu<strong>en</strong>ta <strong>la</strong> propiedad de<br />
linealidad de <strong>la</strong> transformada de Lap<strong>la</strong>ce, podemos p<strong>la</strong>ntear el problema de forma<br />
equival<strong>en</strong>te ¿Exist<strong>en</strong> funciones no nu<strong>la</strong>s cuya transformada de Lap<strong>la</strong>ce sea <strong>la</strong> función<br />
cero?. A <strong>este</strong> respecto, recordemos que estamos considerando que dos funciones<br />
continuas a trozos son iguales si difier<strong>en</strong> a lo sumo <strong>en</strong> sus valores <strong>en</strong> los puntos de<br />
discontinuidad <strong>en</strong> [0, ∞).<br />
Teorema 3.1 (Lerch): La única función continua a trozos cuya transformada de<br />
Lap<strong>la</strong>ce es nu<strong>la</strong> (<strong>en</strong> un intervalo semiinfinito) es <strong>la</strong> función cero:<br />
L(f) = 0 si y sólo si f =0.<br />
Dem. Supongamos que S = [s0, ∞) es un intervalo donde F = L(f) es nu<strong>la</strong>.<br />
Integrando por partes ( � u dv = uv − � v du) <strong>en</strong> <strong>la</strong> transformada de f con<br />
obt<strong>en</strong>emos<br />
donde hemos definido<br />
u = e −(s−s0)t<br />
dv = e −s0t f(t) dt,<br />
� ∞<br />
F (s) = (s − s0) e −(s−s0)t<br />
g(t) dt,<br />
0<br />
� t<br />
g(t) = e −s0τ<br />
f(τ) dτ,<br />
0<br />
que es una función continua, y hemos t<strong>en</strong>ido <strong>en</strong> cu<strong>en</strong>ta que g(0) = 0 y que<br />
limt→∞ e−(s−s0)tg(t) = 0 · F (s0) = 0 para s ∈ S.<br />
Como F se anu<strong>la</strong> <strong>en</strong> H, se ti<strong>en</strong>e que F (s0 + n) = 0 para todo n ∈ N, es decir,<br />
� ∞<br />
e −nt g(t) dt.<br />
0
8 EDUARDO MARTÍNEZ<br />
f(t) F (s)<br />
e at f(t) F (s − a)<br />
f(t − a)H(t − a) e −as F (s)<br />
t n f(t) (−1)<br />
f(t)<br />
t<br />
n dn<br />
F (s)<br />
dsn � ∞<br />
F (σ) dσ<br />
f ′ (t) sF (s) − f(0 − )<br />
f ′′ (t) s 2 F (s) − sf(0 − ) − f ′ (0 − )<br />
f (n) (t) s n F (s) − [s n−1 f(0 − )+s n−2 f ′ (0 − )+· · ·<br />
� t<br />
f(τ) dτ<br />
0<br />
f(t) =f(t + T )<br />
s<br />
· · · + sf (n−2) (0 − )+f (n−1) (0 − )]<br />
F (s)<br />
s<br />
1<br />
1 − e−sT � T<br />
f(t)e<br />
0<br />
−st dt<br />
(f ∗ g)(t) F (s)G(s)<br />
Hacemos el cambio r = e−t y definimos <strong>la</strong> función φ(r) correspondi<strong>en</strong>te a g(t)<br />
ext<strong>en</strong>dida por continuidad a r =0<br />
�<br />
g(− ln r) 0
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 9<br />
de discontinuidad) y ti<strong>en</strong>e s<strong>en</strong>tido hab<strong>la</strong>r de <strong>la</strong> antitransformada de Lap<strong>la</strong>ce o<br />
transformada inversa.<br />
Cálculo de antitransformadas. Para el calculo de <strong>la</strong> transformad inversa de Lap<strong>la</strong>ce<br />
de una función se aplican <strong>la</strong>s reg<strong>la</strong>s obt<strong>en</strong>idas anteriorm<strong>en</strong>te, pero <strong>en</strong> s<strong>en</strong>tido contrario.<br />
En <strong>la</strong> aplicación a <strong>la</strong> teoría de ecuaciones difer<strong>en</strong>ciales lineales, <strong>la</strong>s funciones<br />
que aparec<strong>en</strong> <strong>en</strong> casi todos los problemas son funciones racionales, para <strong>la</strong>s que<br />
podemos usar <strong>la</strong> descomposición <strong>en</strong> fracciones simples. Para una función racional<br />
propia P/Q, con grado(P ) < grado(Q), se ti<strong>en</strong>e<br />
F (s) =<br />
P (s)<br />
Q(s) =<br />
r� mi �<br />
cij<br />
(s − λi)<br />
i=1 j=1<br />
j<br />
donde λ1, . . . , λr son <strong>la</strong>s raíces complejas distintas de Q, ymi es <strong>la</strong> multiplicidad<br />
de <strong>la</strong> raíz λi. Cada uno de estos términos ti<strong>en</strong>e antitransformada muy s<strong>en</strong>cil<strong>la</strong>:<br />
L −1<br />
1 1<br />
=<br />
(s − λ) k+1<br />
k! tk e λt .<br />
Ejemplo 3.2: Hal<strong>la</strong>remos <strong>la</strong> antitransformada de<br />
1<br />
F (s) =<br />
(s + 1) 2 (s + 2) .<br />
La descomposición <strong>en</strong> fracciones simples es<br />
que es <strong>la</strong> transformada de<br />
F (s) =− 1<br />
(s + 1) +<br />
1<br />
+<br />
(s + 1) 2<br />
f(t) =−e −t + te −t + e −2t .<br />
1<br />
(s + 2) .<br />
En ocasiones, cuando hay raíces complejas de multiplicidad baja, podemos proceder<br />
de <strong>la</strong> sigui<strong>en</strong>te manera alternativa.<br />
Ejemplo 3.3: Consideremos <strong>la</strong> función<br />
s +2<br />
F (s) =<br />
s2 +2s +5 .<br />
Para hal<strong>la</strong>r su antitransformada completamos cuadrados para poner <strong>la</strong> fracción <strong>en</strong><br />
forma simple y efectuamos manipu<strong>la</strong>ciones s<strong>en</strong>cil<strong>la</strong>s<br />
F (s) =<br />
s +2<br />
(s + 1) 2 =<br />
+22 s +1<br />
(s + 1) 2 +2<br />
1<br />
+ 2 2<br />
2<br />
(s + 1) 2 +2 2<br />
Así para cada término obt<strong>en</strong>emos <strong>la</strong> antitransformada fácilm<strong>en</strong>te<br />
L −1<br />
�<br />
s +1<br />
(s + 1) 2 +22 �<br />
= L −1<br />
�<br />
s<br />
s2 +22 � �<br />
�<br />
� =e<br />
s→s+1<br />
−t L −1<br />
�<br />
1<br />
s2 +22 �<br />
y de manera análoga<br />
�<br />
�<br />
L −1<br />
2<br />
(s + 1) 2 +2 2<br />
= L −1<br />
�<br />
2<br />
s 2 +2 2<br />
� �<br />
�<br />
�<br />
s→s+1<br />
Por tanto F es <strong>la</strong> transformada de<br />
e −t<br />
�<br />
cos(2t)+ 1<br />
2 sin(2t)<br />
�<br />
⊳<br />
=e −t cos(2t),<br />
=e −t L −1<br />
�<br />
2<br />
s2 +22 �<br />
=e −t sin(2t).<br />
⊳
10 EDUARDO MARTÍNEZ<br />
Ejemplo 3.4: Hal<strong>la</strong>remos <strong>la</strong> antitransformada de<br />
F (s) =<br />
4e −7s<br />
s 2 − 6s + 13 .<br />
T<strong>en</strong>i<strong>en</strong>do <strong>en</strong> cu<strong>en</strong>ta que<br />
4<br />
s2 − 6s + 13 =2<br />
2<br />
(s + 3) 2 +22 = L�2e −3t cos(2t) � .<br />
y <strong>la</strong> propiedad de desp<strong>la</strong>zami<strong>en</strong>to, llegamos a<br />
f(t) = 2H(t − 7)e −3t cos(2t).<br />
4. Aplicación a <strong>la</strong> resolución de ecuaciones difer<strong>en</strong>ciales<br />
La transformada de Lap<strong>la</strong>ce convierte derivadas <strong>en</strong> multiplicación por <strong>la</strong> variable<br />
s, de forma que se convierte una ecuación difer<strong>en</strong>cial <strong>en</strong> una algebraica. Una vez<br />
resuelta esta ecuación, para hal<strong>la</strong>r <strong>la</strong> solución de nuestro problema de valor inicial<br />
se hal<strong>la</strong> su antitransformada. Veamos un ejemplo s<strong>en</strong>cillo.<br />
Ejemplo 4.1: Resolvamos el problema de valor inicial<br />
� x ′ (t) = 2x(t)<br />
x(0) = 5<br />
Alplicamos <strong>la</strong> transformada de Lap<strong>la</strong>ce a <strong>la</strong> ecuación difer<strong>en</strong>cial y obt<strong>en</strong>emos<br />
sX(s) − x(0) = 2X(s)<br />
Sustituy<strong>en</strong>do el valor inicial x(0) = 5 y despejando X(s) llegamos a<br />
X(s) = 5<br />
s − 2<br />
Ahora aplicamos <strong>la</strong> transformada inversa, y vemos que 1/(s − 2) es <strong>la</strong> transformada<br />
de e 2t de donde<br />
x(t) = 5 e 2t ,<br />
que es <strong>la</strong> solución del problema de valor inicial propuesto. ⊳<br />
Ejemplo 4.2: Resolvamos el problema del paracaídas. El problema de valor inicial<br />
que debemos resolver es � v ′ (t) =−αv(t)+g<br />
v(0) = v0<br />
Aplicamos <strong>la</strong> transformada de Lap<strong>la</strong>ce a <strong>la</strong> ecuación difer<strong>en</strong>cial y obt<strong>en</strong>emos<br />
sV (s) − v(0) = −αV (s)+ g<br />
s<br />
Sustituy<strong>en</strong>do el valor inicial v(0) = v0 y despejando V (s) llegamos a<br />
V (s) = v0<br />
s + α +<br />
g<br />
s(s + α)<br />
Ahora aplicamos <strong>la</strong> transformada inversa, y vemos que 1/(s+α) es <strong>la</strong> transformada<br />
de e−αt mi<strong>en</strong>tras que<br />
� �<br />
1 g 1 1<br />
= −<br />
s(s + α) α s s + α<br />
es <strong>la</strong> transformada de g<br />
α [1 − e−αt ]. Por tanto obt<strong>en</strong>emos<br />
v(t) =v0 e −αt + g<br />
α [1 − e−αt ]= g<br />
α +[v0 − g<br />
α ]e−αt .<br />
Al cabo de un tiempo sufici<strong>en</strong>tem<strong>en</strong>te grande, <strong>la</strong> velocidad del paracaídas se aproxima<br />
a <strong>la</strong> velocidad límite<br />
vlim = lim<br />
t→∞ v(t) = g<br />
α .<br />
⊳
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 11<br />
Evid<strong>en</strong>tem<strong>en</strong>te <strong>este</strong> método también nos sirve para resolver ecuaciones de ord<strong>en</strong><br />
n, aunque <strong>en</strong> <strong>este</strong> caso es preferible hal<strong>la</strong>r <strong>la</strong> transformada directam<strong>en</strong>te de <strong>la</strong><br />
ecuación, sin pasar por el sistema auxiliar.<br />
Ejemplo 4.3: Consideremos de nuevo el problema de valor inicial<br />
⎧<br />
⎨<br />
⎩<br />
¨y + 3 ˙y +2y = t<br />
y(0) = 1<br />
˙y(0) = 0.<br />
Aplicando <strong>la</strong> transformada de Lap<strong>la</strong>ce a <strong>la</strong> ecuación obt<strong>en</strong>emos<br />
� � � � 2 1<br />
s Y − ˙y(0) − sy(0) +3 sY − y(0) +2Y = .<br />
s2 Sustituy<strong>en</strong>do <strong>la</strong>s condiciones iniciales y despejando, obt<strong>en</strong>emos<br />
Descomponemos <strong>en</strong> fracciones simples<br />
Y (s) = s3 +3s 2 +1<br />
s 2 (s 2 +3s + 2)<br />
Y (s) = 1 1 3 1 1 5 1<br />
− +3 −<br />
2 s2 4 s s +1 4 s +2<br />
cuya transformada inversa da inmediatam<strong>en</strong>te<br />
x(t) = 1 3<br />
t −<br />
2 4 + 3 e−t − 5<br />
4 e−2t .<br />
Ejemplo 4.4: La ecuación difer<strong>en</strong>cial para una masa colocada <strong>en</strong> un muelle horizontal<br />
es<br />
m¨x(t) =−kx(t).<br />
Supongamos que m =1y k =9. Si el osci<strong>la</strong>dor empieza a osci<strong>la</strong>r <strong>en</strong> x(0) = 1 con<br />
velocidad inicial ˙x(0) = 2, queremos hal<strong>la</strong>r su posición <strong>en</strong> cualquier otro instante.<br />
Aplicando <strong>la</strong> transformada de Lap<strong>la</strong>ce se ti<strong>en</strong>e<br />
es decir,<br />
Por tanto <strong>la</strong> solución es<br />
s 2 X(s) − sx(0) − x ′ (0) = −9X(s)<br />
X(s) =<br />
s +2<br />
s2 +9 =<br />
s<br />
s2 +3<br />
2<br />
+ 2 3<br />
x(t) = cos(3t)+ 2<br />
3 sin(3t).<br />
3<br />
s2 .<br />
+32 Transformada de un sistema. Con más g<strong>en</strong>eralidad, supongamos que queremos resolver<br />
un problema de valor inicial<br />
� ˙X = AX + b(t)<br />
Sabemos que <strong>la</strong> solución es<br />
X(t) = e tA X0 +<br />
X(0 − )=X0<br />
� t<br />
0 −<br />
e (t−τ)A b(τ) dτ.<br />
En esta expresión vemos que, si <strong>la</strong> función b(t) ti<strong>en</strong>e transformada de Lap<strong>la</strong>ce, <strong>en</strong>tonces<br />
<strong>la</strong> solución X(t) también ti<strong>en</strong>e transformada de Lap<strong>la</strong>ce. Por tanto, podemos<br />
transformar directam<strong>en</strong>te el sistema de ecuaciones difer<strong>en</strong>ciales.<br />
⊳<br />
⊳<br />
⊳
12 EDUARDO MARTÍNEZ<br />
Si d<strong>en</strong>otamos por ˆ X(s) a <strong>la</strong> transformada de <strong>la</strong> función X(t), y por ˆ b(s) a <strong>la</strong><br />
transformada de <strong>la</strong> función b(t) t<strong>en</strong>emos que<br />
que se resuelve fácilm<strong>en</strong>te<br />
Aplicando ahora <strong>la</strong> transformada inversa<br />
s ˆ X(s) − X0 = A ˆ X(s)+ ˆ b(s),<br />
ˆX(s) =(s − A) −1 X0 +(s − A) −1ˆ b(s).<br />
X(t) =L −1 {(s − A) −1 X0} + L −1 {(s − A) −1ˆ b(s)}.<br />
Comparando <strong>este</strong> resultado con <strong>la</strong> solución del problema, se ti<strong>en</strong>e que <strong>la</strong> solución<br />
del problema homogéneo es <strong>la</strong> antitransformada de Lap<strong>la</strong>ce de (s − A) −1 X0. En<br />
consecu<strong>en</strong>cia,<br />
L −1 {(s − A) −1 } =e tA ,<br />
y de aquí se deduce que <strong>la</strong> solución particu<strong>la</strong>r del problema no homogéneo es <strong>la</strong><br />
antitransformada de Lap<strong>la</strong>ce del producto (s − A) −1ˆb(s), es decir,<br />
L −1 {(s − A) −1ˆ<br />
� t<br />
tA<br />
b(s)} = (e ) ∗ b(t) = e (t−τ)A b(τ) dτ.<br />
Lo anterior puede servirnos para hal<strong>la</strong>r <strong>la</strong> expon<strong>en</strong>cial de una matriz, aunque<br />
g<strong>en</strong>eralm<strong>en</strong>te el proceso de hal<strong>la</strong>r <strong>la</strong> antitransformada no es s<strong>en</strong>cillo. La utilidad de<br />
<strong>la</strong>s fórmu<strong>la</strong>s anteriores se debe más bi<strong>en</strong> a <strong>la</strong> posibilidad de poder hal<strong>la</strong>r <strong>la</strong> solución<br />
particu<strong>la</strong>r sin realizar ninguna integral.<br />
Ejemplo 4.5: Hal<strong>la</strong>r <strong>la</strong> solución del sistema de ecuaciones difer<strong>en</strong>ciales<br />
˙x = −x − 4y + 10 ˙y = x − y,<br />
con condiciones iniciales x(0) = 4, y(0) = 3.<br />
La transformada de <strong>la</strong> primera ecuación es sX −x(0) = −X −4Y + 10<br />
s . T<strong>en</strong>i<strong>en</strong>do<br />
<strong>en</strong> cu<strong>en</strong>ta <strong>la</strong>s condiciones iniciales, y simplificando obt<strong>en</strong>emos<br />
(s + 1)X +4Y = 10<br />
s +4<br />
La transformada de <strong>la</strong> segunda ecuación es (sY − y(0)) = X − Y . T<strong>en</strong>i<strong>en</strong>do <strong>en</strong><br />
cu<strong>en</strong>ta <strong>la</strong>s condiciones iniciales, y simplificando obt<strong>en</strong>emos<br />
−X +(s + 1)Y =3.<br />
Resolvi<strong>en</strong>do <strong>este</strong> sistema de ecuaciones lineales obt<strong>en</strong>emos<br />
X = 4s2 +2s + 10<br />
s(s2 +2s + 5) =21<br />
s +2<br />
s +1<br />
(s + 1) 2 − 2<br />
+22 Por tanto<br />
Igualm<strong>en</strong>te<br />
Por tanto<br />
x = 2 + 2e −t cos 2t − 2e −t sin 2t.<br />
Y = 3s2 +7s + 10<br />
s(s 2 +2s + 5) =21<br />
s +<br />
0<br />
s +1<br />
(s + 1) 2 +<br />
+22 y = 2 + e −t cos 2t + e −t sin 2t.<br />
2<br />
(s + 1) 2 +2 2<br />
2<br />
(s + 1) 2 +2 2<br />
En resum<strong>en</strong>, <strong>la</strong> solución es x = 2(1 + e −t cos 2t − e −t sin 2t), y = 2 + e −t cos 2t +<br />
e −t sin 2t.<br />
A <strong>este</strong> resultado podíamos haber llegado igualm<strong>en</strong>te usando <strong>la</strong>s expresiones an-<br />
teriores (s − A) ˆ X = X(0) + ˆb, � �� �<br />
s + 1 4 X<br />
=<br />
−1 s +1 Y<br />
� �<br />
4<br />
+<br />
3<br />
� �<br />
10<br />
s<br />
0
La inversa de (s − A) es<br />
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 13<br />
(s − A) −1 =<br />
y su transformada inversa es<br />
e tA = L −1 =<br />
La solución del problema homogéneo es<br />
1<br />
(s + 1) 2 +22 �<br />
s +1<br />
�<br />
−4<br />
1 s +1<br />
�<br />
−t e cos(2t) −t −2e sin(2t)<br />
1<br />
2e−t sin(2t) e−tcos(2t) �<br />
−t e cos(2t) −t −2e sin(2t)<br />
1<br />
2e−t sin(2t) e−tcos(2t) 1<br />
(s + 1) 2 +2 2<br />
�<br />
=<br />
La solución particu<strong>la</strong>r del no homogéneo, se puede obt<strong>en</strong>er por medio de <strong>la</strong> integral<br />
de convolución (<strong>en</strong> <strong>este</strong> caso es muy fácil) o bi<strong>en</strong> por transformada de Lap<strong>la</strong>ce:<br />
(s − A) −1ˆ<br />
� �� �<br />
� �<br />
10<br />
s +1 −4<br />
b =<br />
s<br />
s +1<br />
=<br />
1 s +1 0<br />
1<br />
que es <strong>la</strong> transformada de Lap<strong>la</strong>ce de<br />
� 2+2e −t � − cos(2t) + 2 sin(2t) �<br />
2 − e −t� 2 cos(2t) + sin(2t) �<br />
� �<br />
4<br />
3<br />
�<br />
1<br />
(s + 1) 2 +22 10<br />
s<br />
La solución del problema es <strong>la</strong> suma de ambas. En g<strong>en</strong>eral, lo más s<strong>en</strong>cillo es<br />
hal<strong>la</strong>r directam<strong>en</strong>te <strong>la</strong> solución completa sin descomponer es suma de <strong>la</strong>s soluciones<br />
del homogéneo y particu<strong>la</strong>r del no homogéneo.<br />
(s − A) −1� X(0) + ˆ b � =<br />
=<br />
1<br />
(s + 1) 2 +2 2<br />
1<br />
(s + 1) 2 +2 2<br />
�<br />
� s +1 −4<br />
1 s +1<br />
�<br />
2 2(2s + s + 5)<br />
3s2 �<br />
+7s + 10<br />
y hal<strong>la</strong>ndo <strong>la</strong> transformada inversa obt<strong>en</strong>emos <strong>la</strong> solución<br />
� �<br />
x(t)<br />
=<br />
y(t)<br />
� 2+2e −t � cos(2t) − sin(2t) �<br />
2+e −t� cos(2t) + sin(2t) �<br />
�<br />
�� �<br />
10 4+<br />
Otra v<strong>en</strong>taja de <strong>la</strong> transformada de Lap<strong>la</strong>ce es que se puede aplicar igualm<strong>en</strong>te<br />
a sistemas de ecuaciones difer<strong>en</strong>ciales (lineales con coefici<strong>en</strong>tes constantes) <strong>en</strong> los<br />
que cada variable ti<strong>en</strong>e un ord<strong>en</strong> distinto.<br />
Ejemplo 4.6: Consideremos el sistema de ecuaciones difer<strong>en</strong>ciales<br />
� ¨x +2y =0<br />
˙x +˙y = cos t<br />
Resolvamos dichas ecuaciones con condiciones iniciales x(0) = 0,y(0) = 0, ˙x(0) =<br />
2. La transformada del Lap<strong>la</strong>ce del sistema, una vez sustituidas <strong>la</strong>s condiciones<br />
iniciales es<br />
s 2 X +2Y =2 sX − sY = s<br />
s 2 +1<br />
cuya solución es<br />
X(s) = 2<br />
s2 Y (s) =<br />
+1<br />
1<br />
s2 +1 .<br />
Hal<strong>la</strong>ndo <strong>la</strong> antitransformada, <strong>la</strong> solución es<br />
x(t) = 2 sin t y(t) = sin t.<br />
Como ejercicio, y para compara <strong>la</strong> dificultad, se propone resolver el problema anterior<br />
sin utilizar <strong>la</strong> transformada de Lap<strong>la</strong>ce. ⊳<br />
3<br />
s<br />
⊳
14 EDUARDO MARTÍNEZ<br />
5. Aplicaciones<br />
Ecuaciones con impulsos. Por medio de <strong>la</strong> transformada de Lap<strong>la</strong>ce se pued<strong>en</strong> resolver<br />
fácilm<strong>en</strong>te problemas de valor inicial con impulsos. En ocasiones se argum<strong>en</strong>ta<br />
que es el único método para resolver dichos problemas. Aunque esto no<br />
es cierto, se debe reconocer <strong>la</strong> gran simplificación obt<strong>en</strong>ida al aplicar tal método.<br />
Veamos un ejemplo.<br />
Ejemplo 5.1: Consideremos el problema de valor inicial<br />
� ˙x +4x =2δ(t)<br />
x(0 − ) = 1.<br />
En términos de discontinuidades de salto, se ti<strong>en</strong>e que x(t) ti<strong>en</strong>e una discontinuidad<br />
de salto finito igual a 2, por lo que x(0 + ) = 3. Como, <strong>la</strong> solución de <strong>la</strong> ecuacion<br />
difer<strong>en</strong>cial para t>0 es x(t) =x(α)e−4(t−α) , para α > 0, cuando α ti<strong>en</strong>de a cero<br />
por <strong>la</strong> derecha se obti<strong>en</strong>e que x(t) =x(0 + )e−4t = 3 e−4t , para t>0. (En g<strong>en</strong>eral,<br />
para t
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 15<br />
por <strong>la</strong> cu<strong>en</strong>ta para recorrer<strong>la</strong> no dep<strong>en</strong>da del punto desde el que <strong>la</strong> soltamos. A<br />
dicha curva se le conoce con el nombre de tautócrona.<br />
D<strong>en</strong>otemos por (x0,y0) un punto cualquiera de dicha curva, y calculemos el<br />
tiempo que le cuesta bajar hasta el orig<strong>en</strong>. Si consideramos <strong>la</strong> longitud del arco del<br />
a<strong>la</strong>mbre y d<strong>en</strong>otamos por v(s) <strong>la</strong> velocidad de <strong>la</strong> cu<strong>en</strong>ta cuando hemos recorrido s<br />
unidades de longitud sobre el a<strong>la</strong>mbre, <strong>en</strong>tonces el tiempo empleado es<br />
� L<br />
ds<br />
T (y0) =<br />
v(s) .<br />
La velocidad podemos re<strong>la</strong>cionar<strong>la</strong> con <strong>la</strong> altura por medio de <strong>la</strong> <strong>en</strong>ergía<br />
c = 1<br />
2 mv(x)2 + mgy,<br />
donde <strong>la</strong> constante c = mgy0, es <strong>la</strong> <strong>en</strong>ergía inicial (suponi<strong>en</strong>do que soltamos <strong>la</strong><br />
cu<strong>en</strong>ta <strong>en</strong> x0 con velocidad inicial v(x0) nu<strong>la</strong>). Despejando, obt<strong>en</strong>emos<br />
v(y) = � 2g √ y0 − y<br />
y sustituy<strong>en</strong>do llegamos a<br />
T (y0) = 1<br />
� L<br />
1<br />
√ √<br />
2g 0 y0 − y ds<br />
Finalm<strong>en</strong>te, si parametrizamos <strong>la</strong> curva por <strong>la</strong> variable y, es decir, los puntos de <strong>la</strong><br />
curva son de <strong>la</strong> forma (x(y),y), <strong>en</strong>tonces <strong>la</strong> longitud del arco también será función de<br />
<strong>la</strong> variable y, es decir, s = s(y). Cambiando <strong>la</strong> variable de integración y d<strong>en</strong>otando<br />
w(y) =ds/dy obt<strong>en</strong>emos<br />
0<br />
T (y0) = 1<br />
� y0<br />
w(y)<br />
√ √<br />
2g 0 y0 − y ds<br />
Posteriorm<strong>en</strong>te necesitaremos <strong>la</strong> re<strong>la</strong>ción explícita <strong>en</strong>tre <strong>la</strong> función w(y) y <strong>la</strong> parametrización<br />
x = x(y) de <strong>la</strong> curva, que concretam<strong>en</strong>te es<br />
w(y) = ds<br />
dy =<br />
0<br />
�<br />
1+<br />
� �2 dx<br />
.<br />
dy<br />
Una vez <strong>en</strong>contrada el tiempo como función de <strong>la</strong> altura desde <strong>la</strong> que se suelta<br />
<strong>la</strong> cu<strong>en</strong>ta, resolvamos el problema m<strong>en</strong>cionado, es decir, hal<strong>la</strong>r x(y) de manera que<br />
T sea constante, no dep<strong>en</strong>da de y0. Para ello debemos resolver <strong>la</strong> ecuación<br />
�<br />
� y0 w(y)<br />
2gT = √<br />
y0 − y dy<br />
que es un producto de convolución de <strong>la</strong>s funciones ν y g(y) = 1/ √ y, es decir,<br />
� 2gT =(w ∗ g)(y0)<br />
Al realizar <strong>la</strong> transformada de Lap<strong>la</strong>ce resulta √ 2gT/s = W (s)G(s), y como <strong>la</strong><br />
transformada de g(t) = 1/ √ t es G(s) = � π/s, obt<strong>en</strong>emos finalm<strong>en</strong>te<br />
W (s) = � 2gT 1<br />
�<br />
s<br />
s π = � 2gT 1<br />
√ =<br />
πs � 2g T<br />
�<br />
π<br />
π s .<br />
La transformada inversa de esta función es<br />
w(y) = � 2g T 1<br />
√ .<br />
π y<br />
Sustituy<strong>en</strong>do <strong>en</strong> <strong>la</strong> re<strong>la</strong>ción w(y) =<br />
�<br />
1+<br />
� �2 dx<br />
dy , y l<strong>la</strong>mando a = gT 2 /π2 se obti<strong>en</strong>e<br />
dx<br />
dy =<br />
�<br />
2a<br />
− 1.<br />
y
16 EDUARDO MARTÍNEZ<br />
Para resolver esta ecuación hacemos el cambio de variable y =2a sin 2 (θ/2), de<br />
forma que integrando se obti<strong>en</strong>e<br />
x = a(θ + sin θ)+b y = a(1 + cos θ).<br />
La constante de integración b se puede tomar cero ya que <strong>la</strong> curva ha de pasar por<br />
el orig<strong>en</strong>. La curva que hemos obt<strong>en</strong>ido es (un arco de) una cicloide, <strong>la</strong> curva que<br />
describe un punto de una circunfer<strong>en</strong>cia al rodar sin deslizar.<br />
Un problema más g<strong>en</strong>eral que el anterior es el conocido como problema mecánico<br />
de Abel que consiste <strong>en</strong> especificar una función T (y0) y hal<strong>la</strong>r <strong>la</strong> forma del a<strong>la</strong>mbre<br />
para <strong>la</strong> cual el tiempo de bajada desde el punto y0 es precisam<strong>en</strong>te T (y0). ⊳<br />
Teoría de circuitos. En <strong>la</strong>s aplicaciones a <strong>la</strong> Física y <strong>la</strong> Ing<strong>en</strong>iería, <strong>la</strong> utilidad de <strong>este</strong><br />
método provi<strong>en</strong>e del hecho de que, <strong>en</strong> multitud de problemas, es posible p<strong>la</strong>ntear<br />
directam<strong>en</strong>te <strong>la</strong>s ecuaciones que satisface <strong>la</strong> transformada, es decir sin p<strong>la</strong>ntear<br />
primero el sistema de ecuaciones difer<strong>en</strong>ciales para transformar a continuación.<br />
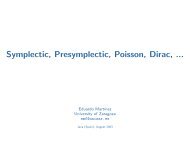
Por ejemplo, <strong>en</strong>5.2. <strong>la</strong> teoría APLICACI de circuitos ÓNse Aemplea LA RESOLUCIÓN esta técnica. <strong>DE</strong> CIRCUITOS 6<br />
Consideremos el circuito eléctrico rlc de <strong>la</strong> figura<br />
vin(t)<br />
R<br />
i(t)<br />
(a)<br />
(b)<br />
Figura 5.6: Circuito serie RLC (a), y su equival<strong>en</strong>te de Lap<strong>la</strong>ce(b)<br />
Por otro <strong>la</strong>do aparec<strong>en</strong> <strong>la</strong>s condiciones iniciales, tanto del inductor como d<br />
capacitor, que no conti<strong>en</strong><strong>en</strong> el factor I(s), y como estamos sumando t<strong>en</strong>sion<br />
estos términos deb<strong>en</strong> ser t<strong>en</strong>siones. En el circuito equival<strong>en</strong>te se los repres<strong>en</strong>ta co<br />
g<strong>en</strong>eradores cuyo valor dep<strong>en</strong>de de <strong>la</strong> <strong>en</strong>ergía inicial almac<strong>en</strong>ada <strong>en</strong> cada elem<strong>en</strong>t<br />
Finalm<strong>en</strong>te, agrupando g<strong>en</strong>eradores <strong>en</strong> un miembro y términos con el facto<br />
I(s) <strong>en</strong> el otro, <strong>la</strong> ecuación de circuito queda<br />
Vin(s)+Li(0) − vC(0)<br />
1<br />
= RI(s)+sLI(s)+<br />
s sC I(s)<br />
Vin(s)+Li(0) − vC(0)<br />
s =<br />
�<br />
R + sL + 1<br />
�<br />
I(s)<br />
sC<br />
Vin(s)+Li(0) − vC(0)<br />
= Z(s)I(s)<br />
s<br />
Nuevam<strong>en</strong>te, Z(s) es <strong>la</strong> impedancia de s o impedancia de Lap<strong>la</strong>ce, formada por<br />
suma de cada una de <strong>la</strong>s impedancias de s del circuito.<br />
�<br />
Z(s) = R + sL + 1<br />
Las ecuaciones del ciruito son vin = vR + vL + vC donde vR, vL y vC son <strong>la</strong>s caídas<br />
de t<strong>en</strong>sión <strong>en</strong> <strong>la</strong> resist<strong>en</strong>cia, <strong>la</strong> autoinducción y el cond<strong>en</strong>sador, respectivam<strong>en</strong>te.<br />
Dichas t<strong>en</strong>siones vi<strong>en</strong><strong>en</strong> dadas <strong>en</strong> términos de <strong>la</strong> int<strong>en</strong>sidad i que circu<strong>la</strong> por el<br />
circuito por<br />
vR = iR vL = L<br />
�<br />
(5.30<br />
sC<br />
El circuito de <strong>la</strong> (fig. 5.6(b)) permite obt<strong>en</strong>er <strong>en</strong> forma directa <strong>la</strong> (ec. 5.29) que<br />
lo que se buscaba. Obsérvese como <strong>la</strong> po<strong>la</strong>ridad de los g<strong>en</strong>eradores de t<strong>en</strong>sión qu<br />
repres<strong>en</strong>tan <strong>la</strong>s condiciones iniciales determinan el signo <strong>en</strong> <strong>la</strong> ecuación.<br />
De igual forma, hagamos ahora el mismo análisis con un circuito RLC paralel<br />
Parti<strong>en</strong>do de <strong>la</strong> suma de <strong>la</strong>s corri<strong>en</strong>tes <strong>en</strong> el tiempo igual a <strong>la</strong> corri<strong>en</strong>te total y lueg<br />
transformando t<strong>en</strong>dremos<br />
iin(t) =iR(t)+iL(t)+iC(t)<br />
Iin(s) =IR(s)+IL(s)+IC(s)<br />
reemp<strong>la</strong>zando<br />
di<br />
and C<br />
dt<br />
dvC<br />
= i.<br />
dt<br />
En consecu<strong>en</strong>cia, <strong>la</strong> ecuación que determina <strong>la</strong> int<strong>en</strong>sidad de corri<strong>en</strong>te es<br />
vin = Ri + L di<br />
+ vC C<br />
dt dvC<br />
= i.<br />
dt<br />
Para resolver<strong>la</strong>s aplicamos <strong>la</strong> transformada de Lap<strong>la</strong>ce, obt<strong>en</strong>i<strong>en</strong>do<br />
Vin = RI + L[sI − i(0)] + VC C(sVC − vC(0)) = I<br />
de donde<br />
� �<br />
1 vC(0)<br />
Vin = RI + L[sI − i(0)] + I + .<br />
sC s<br />
Aplicando <strong>la</strong> transformada inversa, se obti<strong>en</strong>e fácilm<strong>en</strong>te <strong>la</strong> solución i(t).<br />
El hecho que queremos destacar es que <strong>la</strong>s ecuaciones para <strong>la</strong> transformada se<br />
pued<strong>en</strong> obt<strong>en</strong>er directam<strong>en</strong>te del circuito, sin t<strong>en</strong>er que p<strong>la</strong>ntear <strong>la</strong>s ecuaciones difer<strong>en</strong>ciales<br />
y luego transformar<strong>la</strong>s, lo que supone una gran simplificación. Las resist<strong>en</strong>cias<br />
se quedan como están, <strong>la</strong>s autoinducciones se cambian por una impedancia sL<br />
y se añade un pot<strong>en</strong>cial LiL(0), los cond<strong>en</strong>sadores se cambian por una impedancia<br />
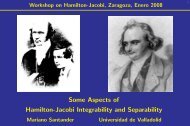
5.2. APLICACIÓN 1/sC A LAy se RESOLUCIÓN añade un pot<strong>en</strong>cial <strong>DE</strong>vC(0)/s. CIRCUITOS En <strong>la</strong> figura sigui<strong>en</strong>te se muestra 61el<br />
circuito<br />
rlc equival<strong>en</strong>te <strong>en</strong> el d<strong>en</strong>ominado dominio de <strong>la</strong> frecu<strong>en</strong>cia<br />
R L<br />
R sL<br />
Li(0) 1<br />
vin(t) i(t)<br />
sC<br />
C Vin(s) I(s)<br />
vC(0)<br />
s<br />
(a)<br />
(b)<br />
Figura 5.6: Circuito serie RLC (a), y su equival<strong>en</strong>te de Lap<strong>la</strong>ce(b)<br />
Por otro <strong>la</strong>do aparec<strong>en</strong> <strong>la</strong>s condiciones iniciales, tanto del inductor como del<br />
capacitor, que no conti<strong>en</strong><strong>en</strong> el factor I(s), y como estamos sumando t<strong>en</strong>siones<br />
estos términos deb<strong>en</strong> ser t<strong>en</strong>siones. En el circuito equival<strong>en</strong>te se los repres<strong>en</strong>ta con<br />
L<br />
C<br />
Vin(s)<br />
R<br />
I(s)<br />
sL<br />
Li(0)<br />
vC(0)<br />
s<br />
1<br />
sC
vf(t) =Ri(t)+L dt + C<br />
y derivando se obti<strong>en</strong>e <strong>la</strong> Ec. Dif. de 2 ◦ ord<strong>en</strong> a resolver<br />
L d2i(t) di(t) 1<br />
+ R + i(t) =dvf(t)<br />
dt2 dt C dt<br />
<strong>TRANSFORMADA</strong> <strong>DE</strong> <strong>LAPLACE</strong> 17<br />
4.3), se obit<strong>en</strong>e una Ec.Dif. de segundo ord<strong>en</strong>. Este análisis se deja como ejercicio<br />
para el lector.<br />
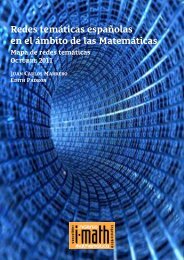
Ejemplo 5.5: Hal<strong>la</strong>r <strong>la</strong>s int<strong>en</strong>sidades <strong>en</strong> el circuito<br />
i(t)dt<br />
(4.3)<br />
De igual forma, con dos elem<strong>en</strong>tos del mismo tipo como el circuito RL de <strong>la</strong> (fig.<br />
L1<br />
vf (t) i(t) R L2<br />
L<strong>la</strong>memos Figura 4.3: j a <strong>la</strong> Circuito corri<strong>en</strong>te irreductible de <strong>la</strong> segunda conmal<strong>la</strong>, dos elem<strong>en</strong>tos de forma que almac<strong>en</strong>an <strong>la</strong>s ecuaciones <strong>en</strong>ergía del<br />
circuito <strong>en</strong> el dominio de <strong>la</strong> frecu<strong>en</strong>cia son<br />
Notese que <strong>en</strong> cada ejemplo anterior <strong>la</strong> Ec.Dif. puede ser p<strong>la</strong>nteada <strong>en</strong> terminos<br />
Vf = L1sI − L1I(0) + R(IJ) 0 = R(J − I)+LsJ + L2j(0)<br />
de cualquier parámetro del circuito, por ejemplo si <strong>en</strong> <strong>la</strong> (ec. 4.1) se pone <strong>la</strong> t<strong>en</strong>sión<br />
Como ejercicio hal<strong>la</strong>r <strong>la</strong>s ecuaciones difer<strong>en</strong>ciales del circuitos y hal<strong>la</strong>r su transfor-<br />
del circuito mada, comprobando <strong>en</strong> terminos que deel<strong>la</strong>resultado corri<strong>en</strong>te es el por mismo. el inductor <strong>en</strong>tonces<br />
⊳<br />
v(t) =vL(t) =L diL<br />
dt<br />
if(t) = 1<br />
R LdiL<br />
dt + iL + C d<br />
�<br />
L<br />
dt<br />
diL<br />
�<br />
dt<br />
if(t) = L diL<br />
R dt + iL + CL d2iL dt2 Notas, ac<strong>la</strong>raciones y ext<strong>en</strong>siones<br />
Transformada inversa. La transformada de Lap<strong>la</strong>ce puede también definirse para<br />
valores complejos de <strong>la</strong> variable s, dando como resultado una función compleja de<br />
variable compleja definida <strong>en</strong> un cierto dominio del p<strong>la</strong>no complejo. En términos de<br />
dicha función, se puede dar una fórmu<strong>la</strong> para <strong>la</strong> transformada inversa de Lap<strong>la</strong>ce,<br />
por medio de <strong>la</strong> integral de Bromwich<br />
f(t) =<br />
<strong>la</strong> Ec.Dif. queda <strong>en</strong> terminos de <strong>la</strong> corri<strong>en</strong>te por el inductor.<br />
1<br />
� γ+i∞<br />
e<br />
2πi<br />
tz F (z) dz.<br />
γ−i∞<br />
donde se elige γ ∈ R para que el contorno de integración (el contorno de un<br />
semidisco) esté cont<strong>en</strong>ido <strong>en</strong> <strong>la</strong> región de converg<strong>en</strong>cia. [[Dar refer<strong>en</strong>cias]]<br />
Matriz de transfer<strong>en</strong>cia. En <strong>la</strong>s aplicaciones a <strong>la</strong> Ing<strong>en</strong>iería, no todas <strong>la</strong>s variables<br />
son de interés, como ocurre <strong>en</strong> el caso de <strong>la</strong>s ecuaciones de ord<strong>en</strong> n donde sólo nos<br />
interesa <strong>la</strong> variable y. Otro c<strong>la</strong>ro ejemplo es <strong>la</strong> teoría de circuitos: <strong>la</strong>s ecuaciones del<br />
circuito involucran los pot<strong>en</strong>ciales <strong>en</strong> todos los nudos del circuito, pero só<strong>la</strong>m<strong>en</strong>te<br />
unos cuantos de estos pot<strong>en</strong>ciales (los l<strong>la</strong>mados pot<strong>en</strong>ciales de salida del circuito)<br />
son los que nos interesan. En g<strong>en</strong>eral, dichas ecuaciones toman <strong>la</strong> forma<br />
X ′ = AX + BU (ecuaciones de estado)<br />
Y = CX (ecuaciones de salida)<br />
donde U es el vector de variables de <strong>en</strong>trada, Y es el vector de variables de salida,<br />
y A, B, C son matrices de dim<strong>en</strong>siones adecuadas. Aplicando <strong>la</strong> transformada de<br />
Lap<strong>la</strong>ce tomando condiciones iniciales nu<strong>la</strong>s, se <strong>en</strong>cu<strong>en</strong>tra fácilm<strong>en</strong>te que<br />
ˆY (s) = [C(s − A) −1 B] Û(s),<br />
que da <strong>la</strong> re<strong>la</strong>ción <strong>en</strong>tre (<strong>la</strong>s transformadas de Lap<strong>la</strong>ce de) <strong>la</strong> <strong>en</strong>trada y <strong>la</strong> salida<br />
del sistema. La matriz T (s) =C(s − A) −1 B se l<strong>la</strong>ma matriz de transfer<strong>en</strong>cia, y<br />
sus elem<strong>en</strong>tos son funciones racionales (i. e. coci<strong>en</strong>te de polinomios) <strong>en</strong> <strong>la</strong> variable<br />
s. Cuando hay una so<strong>la</strong> <strong>en</strong>trada y una so<strong>la</strong> salida (i. e. los vectores U e Y son de<br />
dim<strong>en</strong>sión uno), T (s) es una matriz 1 × 1, es decir es una función esca<strong>la</strong>r de s. En<br />
<strong>este</strong> caso se hab<strong>la</strong> de <strong>la</strong> función de transfer<strong>en</strong>cia.<br />
La matriz de transfer<strong>en</strong>cia no es sino <strong>la</strong> transformada de Lap<strong>la</strong>ce de <strong>la</strong> matriz<br />
respuesta a un impulso unitario, que estudiamos <strong>en</strong> el <strong>capítulo</strong> anterior. En términons<br />
de el<strong>la</strong>, <strong>la</strong> salida del sistema se expresa <strong>en</strong> función de <strong>la</strong> <strong>en</strong>trada por medio<br />
de<br />
ˆY (s) =T (s) Û(s).<br />
La matriz de transfer<strong>en</strong>cia ti<strong>en</strong>e <strong>la</strong> sigui<strong>en</strong>te interpretación: si <strong>la</strong> i-ésima compon<strong>en</strong>te<br />
de <strong>la</strong> <strong>en</strong>trada es un delta de Dirac y el resto de <strong>en</strong>tradas son nu<strong>la</strong>s,
18 EDUARDO MARTÍNEZ<br />
U(t) =δ(t)ei, <strong>en</strong>tonces <strong>la</strong> transformada de Lap<strong>la</strong>ce de <strong>la</strong> salida es <strong>la</strong> i-ésima columna<br />
de T (s).<br />
Por otro <strong>la</strong>do, expresando <strong>la</strong> matriz de transfer<strong>en</strong>cia <strong>en</strong> términos de <strong>la</strong> matriz de<br />
adjuntos de s − A se ti<strong>en</strong>e que<br />
T (s) = 1<br />
[C Adj(s − A)B],<br />
p(s)<br />
de donde se deduce que los polos de <strong>la</strong> matriz de transfer<strong>en</strong>cia (los ceros del d<strong>en</strong>ominador)<br />
son los valores propios de <strong>la</strong> matriz A. Por tanto, es equival<strong>en</strong>te hab<strong>la</strong>r<br />
de polos de <strong>la</strong> función de transfer<strong>en</strong>cia, de valores propios de <strong>la</strong> matriz A, o de<br />
modos normales del sistema, como también se conoc<strong>en</strong> <strong>en</strong> <strong>la</strong> literatura. Por tanto,<br />
podemos decir que <strong>la</strong> estabilidad del sistema dep<strong>en</strong>de de dónde estén colocados los<br />
polos de <strong>la</strong> matriz de transfer<strong>en</strong>cia <strong>en</strong> el p<strong>la</strong>no complejo.<br />
Ejercicio 5.6: Un motor de corri<strong>en</strong>te continua queda caracterizado por <strong>la</strong> resist<strong>en</strong>cia<br />
R y <strong>la</strong> inductancia L del circuito eléctrico de <strong>la</strong> armadura, y por el mom<strong>en</strong>to<br />
de inercia J del rotor y el coefici<strong>en</strong>te de rozami<strong>en</strong>to viscoso γ. Si v es el pot<strong>en</strong>cial<br />
aplicado al motor, y θ es el ángulo de giro del rotor, <strong>la</strong>s ecuaciones que gobiernan<br />
su movimi<strong>en</strong>to son<br />
Ri + L di dθ<br />
= v − Kf Kti = J d2θ dθ<br />
+ γ 2<br />
dt<br />
dt<br />
Se ha supuesto que <strong>la</strong> fuerza electromotriz g<strong>en</strong>erada por el rotor es proporcional<br />
a <strong>la</strong> velocidad angu<strong>la</strong>r y que el mom<strong>en</strong>to de rotación g<strong>en</strong>erado por <strong>la</strong> bobina es<br />
proporcional a <strong>la</strong> int<strong>en</strong>sidad i que circu<strong>la</strong> por el circuito.<br />
La transformada de Lap<strong>la</strong>ce de dichas ecuaciones con condiciones iniciales nu<strong>la</strong>s<br />
es<br />
(R + sL)I = V − Kf sΘ KtI =(Js 2 + γs)Θ.<br />
De aquí el movimi<strong>en</strong>to angu<strong>la</strong>r <strong>en</strong> función del voltaje aplicado es <strong>la</strong> transformada<br />
inversa de<br />
Θ<br />
V =<br />
Como ejercicio hállese dicha transformada.<br />
dt<br />
dt .<br />
Kt/JL<br />
s[s 2 +(γ/J + R/L)s + γR/JL + KiKf /JL]