Procesos Estocásticos Estacionarios
Procesos Estocásticos Estacionarios
Procesos Estocásticos Estacionarios

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Capítulo 2<strong>Procesos</strong> Estocásticos <strong>Estacionarios</strong>Las series temporales se pueden clasificar en dos tipos:Series con valores estables alrededor de un nivel constante (capítulos2-4).Series con tendencias, estacionalidad u otros efectos evolutivos en eltiempo (capítulo 5).Ejemplo 12 Las series núm. 1) y 2) pueden tener un nivel estable, la 3)y la 4) seguro que no.Nota 6 La estabilidad depende del periodo de observación. Por ejemplo,en una serie anual de la temperatura media en un lugar, cuanto más añosse observen, menos problable es que el nivel se mantenga constante.Nota 7 Los valores sucesivos de una serie suelen ser dependientes, aunquesea simplemente por inercia.2.1. Concepto de procesos estocásticosProceso estocástico: Conjunto de v.a. (Y t ) t∈I , donde el índice t toma valoresen un conjunto I. Llamamos trayectoria del proceso a una realizacióndel proceso estocástico. Si I es discreto, el proceso es en tiempo discreto.Si I es continuo, el proceso es en tiempo continuo.Ejemplo 13 Un ejemplo de proceso en tiempo discreto se obtiene paraI = {1, . . .,n}. En este caso, el proceso es Y 1 , Y 2 , . . .,Y n , y una trayectoriase denota por y 1 , y 2 , . . .,y n .Ejemplo 14 Un ejemplo de proceso en tiempo continuo se obtiene paraI = [0, T], I = [0, ∞] ó I = (−∞, ∞).39
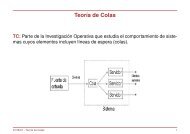
Serie temporal: Una serie temporal es una realización de un procesoestocástico en tiempo discreto, donde los elementos de I están ordenadosy corresponden a instantes equidistantes del tiempo.Si I = {1, . . .,n}, la serie es y 1 , y 2 , . . .,y n ;Si I = N, la serie es y 0 , y 1 , y 2 , . . .,;Si I = Z, entonces la serie es . . .,y −2 , y −1 , y 0 , y 1 , y 2 . . ..Una serie temporal describe la evolución aleatoria de una variable en eltiempo.Ejemplo 15 Un ejemplo de un proceso con I no ordenado es un procesoespacial, en el que I ⊆ R 2 .Nota 8 Otra clasificación de los procesos es atendiendo a los valores quetoman las variables Y t . Si éstas son discretas, el proceso se llama tambiéndiscreto. Si son continuas, el proceso es continuo.En lo sucesivo, (Y t ) denotará un proceso en tiempo discreto con I = Nó I = Z.Distribución n-dimensional de un proceso: Es la función de distribuciónde un conjunto de n variables del proceso (Y 1 , . . .,Y n ), es decir,F(y 1 , . . .,y n ) = P(Y 1 ≤ y 1 , . . .,Y n ≤ y n ), n ∈ N.La distribución de un proceso está caracterizada por el conjunto de todaslas distribuciones finito-dimensionales.Ejemplo 16 Paseo aleatorio: Un paseo aleatorio está definido porY t =t∑a j , donde a j ∼ iid N(0, σ 2 ).j=1Hemos generado seis trayectorias de tamaño T = 300, y 1 , . . .,y 300 , de unpaseo aleatorio (Y t ) con σ 2 = 1, y las hemos representado en la Figura 2.1.(izquierda). Podemos ver que el gráfico de las distintas trayectorias nos dainformación sobre la distribución de probabilidad del proceso.Ejemplo 17 Proceso químico: Medimos la concentración de una sustanciacada minuto durante 5 horas. Repetimos esto en distintos días bajolas mismas condiciones para obtener información sobre la distribución del40
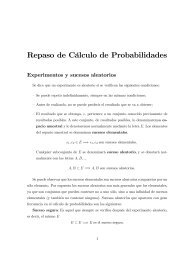
proceso:Tenemos varias series de la forma y 1 , . . .,y 300 provenientes del mismo proceso,una para cada día.Sea Y t la distribución de la concentración en el minuto t-ésimo. Se suponeque la distribución de Y t es la misma cada día. Entonces, al aumentar elnúmero de días, la proporción con la que y t pertenece a un intervalo (a, b)converge a la probabilidad P(a < Y t < b). Es decir, obtenemos informaciónsobre la distribución de Y t repitiendo el experimento.Paseo aleatorioFigura 2.1: Varias trayectorias de dos procesosProceso químico−30 −20 −10 0 10 20 30concentration [%]0 10 20 30 40 500 50 100 150 200 250 300time0 50 100 150 200 250 300timeEjemplo 18 Temperatura en Düsseldorf: (serie núm. 23, 1/1991-12/2003):Si consideramos que la distribución de la temperatura es la misma en cadauno de los 13 años observados, entonces tenemos 13 trayectorias del procesocon 12 variables aleatorias cada una (una por mes). Véase la Figura2.3 izquierda.Podemos hacer lo mismo con la serie de las lluvias (serie núm. 24). Véasela Figura 2.3 derecha.Nota 9 Para obtener información sobre la distribución conjunta del procesonecesitamos observar muchas realizaciones del este proceso. Si no se41
TemperaturaFigura 2.2: Variables climáticas en Düsseldorf.lluvia−5 0 5 10 15 20 250 50 100 1502 4 6 8 10 12month2 4 6 8 10 12monthdispone de varias realizaciones o trayectorias, es necesario realizar hipótesisadicionales que simplifiquen la distribución del proceso. Hipótesis habituales:Suponer que la distribución conjunta es normal multivariante. Entoncesquedará determinada por las medias, varianzas y covarianzas.Restringirse a un análisis lineal: Especificar medias, varianzas y covariancestambién sería suficiente si solo estamos interesados en lasrelaciones lineales entre las variables del proceso.Proceso Normal: Un proceso (Y t ) t∈N es Normal si todas las distribucionesfinito-dimensionales son normales.Función de medias: La función de medias de un proceso estocástico(Y t ) t∈I es una función de t que proporciona las esperanzas de las variablesY tµ t = E(Y t ), t ∈ I.Función de varianzas: La función de varianzas de un proceso estocástico(Y t ) t∈I es una función de t que proporciona las varianzas de las Y tσ 2 t = V ar(Y t ), t ∈ I.Función de autocovarianzas: La función de autocovarianzas de un procesoestocástico (Y t ) t∈I es una función que describe las covarianzas entre42
las variables del proceso en cada par de instantesγ t1 ,t 2= Cov(Y t1 , Y t2 ) = E[(Y t1 − µ t1 )(Y t2 − µ t2 )] , t 1 , t 2 ∈ I .Función de autocorrelación: La función de autocorrelación de un procesoestocástico (Y t ) t∈I es una función de dos instantes que describe las correlacionesentre las variables en un par de instantes t 1 , t 2 ∈ I cualesquieraNota 10 Se verifica:ρ t1 ,t 2= Cor(Y t1 , Y t2 ) = γ t 1 ,t 2σ t1 σ t2, t 1 , t 2 ∈ I .γ t,t = σ 2 t para cada t ∈ I.Las dimensiones de las autocovarianzas son los cuadrados de la serie.Las autocorrelaciones permiten comparar distintas series ya que sonadimensionales.2.2. <strong>Procesos</strong> estacionariosEn muchas situaciones sólo se ha observado una realización del proceso;por ejemplo, en la serie núm. 2) de manchas solares o en la núm. 3) dela población en EE.UU. Entonces, para poder estimar las característicasdel proceso (medias, varianzas o autocovarianzas) necesitamos suponer queson estables a lo largo del tiempo; es decir, que el proceso sea estacionario.Un proceso estocástico (Y t ) t∈Z es:estable en media si µ t = µ = cte.estable en varianza si σ 2 t = σ 2 y = cte.estable en autocovarianza si γ t1 ,t 1 +h = γ t2 ,t 2 +h = γ h para cualquierpar de instantes t 1 , t 2 ∈ Z y cualquier h ∈ Z.estacionario en sentido débil si es estable en media y en autocovarianza.estacionario en sentido estricto si las distribuciones marginalesde todas las variables son idénticas, y además la distribución finitodimensionalde cualquier conjunto de variables sólo depende de losretardos. Es decir, siF t1 ,...,t k(y 1 , . . .,y k ) = F t1 +h,...,t k +h(y 1 , . . .,y k )43
para cualquier k ∈ N, t 1 , . . .,t k , h ∈ Z, y y 1 , . . .,y k ∈ R, donde F t1 ,...,t kdenota la distribución conjunta de Y t1 , . . .,Y tk .̌ La estacionaridad en sentido estricto es una condición muy fuerte ydifícil de comprobar en la práctica.̌ La estacionaridad débil no implica la estricta, salvo para procesos normales.Ejemplo 19 La población de EE.UU. (serie núm. 3) no es estacionaria enla media. El crecimiento del alquiler (núm. 1) parece estable en la media,pero no en la varianza. La serie de pasajeros (núm. 19) no parece estableen la media ni en la varianza.Puede ocurrir que una serie sea estable en la varianza pero no en la media,aunque esto es dificil de distinguir en un gráfico.Propiedades de series estables en autocovarianza:γ 0 = σ 2 yγ h = γ −hρ h = ρ −h , llamando ρ h = γ h /γ 0 al coeficiente de autocorrelación.Función de autocorrelación simple (fas): Es la función de autocorrelaciónentre variables separadas h instantes para series estables en autocovarianza.Se denota por ρ h . Proporciona las correlaciones en función delretardo h.Proceso de ruido blanco: Llamamos ruido blanco a un proceso (Y t ) si:E(Y t ) = 0V ar(Y t ) = σ 2Cov(Y t , Y t+h ) = 0, h = ±1, ±2, . . .Si además Y t es un proceso Normal, entonces todas las variables del procesoson independientes. En este caso, (Y t ) se llama ruido blanco normal.Ejemplo 20 Sea (Y t ) t∈Z un ruido blanco y definimos el proceso Z t = Y t +θY t−1 . Comprobar si (Z t ) t∈Z es estacionario en sentido débil.La función de medias viene dada porE(Z t ) = ...44
La función de autocovarianzas viene dada porCov(Z t , Z t+h ) = ...Tenemos que distinguir tres casos:Cov(Z t , Z t+h ) = ...Ejemplo 21 Sea (Y t ) un proceso estacionario con E(Y t ) = µ y X t otroproceso definido por{Yt , si t es imparX t =Y t + 1 si t es par.Obsérverse que Cov(X t , X t+h ) = Cov(Y t , Y t+h ) = γ h es estable, pero laesperanza de (X t ) no lo es, ya que{ µ, si t es imparE(X t ) =µ + 1 si t es par.Ejemplo 22 Compruébese que un paseo aleatorio (Y t ) definido por Y t =∑ tj=1 a t tiene esperanza cero, pero no es estacionario.Efectivamente, la esperanza esE(Y t ) = ...La covarianza entre dos instantes separados en h unidades esCov(Y t+h , Y t ) = ....45
Matrices de autocovarianzas y de autocorrelaciones de orden h:Para un proceso estacionario, las matrices de autocovarianzas y de autocorrelaciones⎛de orden h son:⎞ ⎛⎞γ 0 γ 1 . . . γ h−1ρ 0 ρ 1 . . . ρ h−1γΓ h = 1 γ 0....⎜⎟⎝ .... γ 1⎠ , R ρh = 1 ρ 0....⎜⎟⎝ .... ρ 1⎠γ h−1 . . . γ 1 γ 0 ρ h−1 . . . ρ 1 ρ 0Estabilidad de procesos estacionarios ante combinaciónes lineales(i) Si multiplicamos un proceso estacionario por una constante, resultaun proceso estacionario.(ii) Si sumamos varios procesos que son conjuntamente estacionarios, lasuma también lo es.Ejemplo 23 (Incrementos) Sea (Y t ) un proceso estacionario, y definimosel proceso de incrementos Z t = Y t − Y t−1 . Compruébese que (Z t )es estacionario.Efectivamente,E(Z t ) = ...V ar(Z t ) = ...Cov(Z t , Z t+h ) = ...(iii) Un proceso que es combinación lineal de procesos estacionarios esestacionario: sea c = (c 1 , . . .,c k ) ′ un vector de constantes e Y t =(Y 1t , . . .,Y kt ) ′ un vector de k procesos conjuntamente estacionarios; esdecir, cada (Y it ) es estacionario y las covarianzas entre dos variablesde distintas componentes i y j sólo dependen de i, j y del retardo. SeaZ t = c ′ Y t :E(Z t ) = ...V ar(Z t ) = ...Cov(Z t , Z t+h ) = ...46
2.3. EstimaciónSea (Y t ) un proceso estacionario con media µ = E(Y t ), varianza σ 2 =V ar(Y t ) y función de autocovarianzas γ h = Cov(Y t , Y t+h ). Si solo tenemosuna realización y 1 , . . .,y n del proceso, ¿cómo estimamos sus características?Media muestral: La media muestral del proceso esˆµ = Ȳ = 1 n∑Y nnt=1Varianza muestral: La varianza muestral esS 2 = 1 n∑(Y t −n Ȳ )2y la desviación típica muestral est=1S = √ S 2Autocovarianzas muestrales (función de autocovarianza empírica)c h = 1 ∑n−h(Y t −n Ȳ )(Y t+h − Ȳ )t=1Autocorrelación muestral (función de autocorrelación empírica)r h = c hc 0Correlograma: gráfico de la función de autocorrelación empírica enfunción del retardo.Propiedades:La media muestral es un estimador insesgado de µ:E(Ȳ ) = ...47
Varianza de la media muestral:( )1n∑V ar Y t = ...nt=1̌ Si γ h = 0, ∀h > 0, entonces V ar(Ȳ ) = γ 0/n.̌ Si γ h ≠ 0 para algún h > 0, entonces V ar(Ȳ ) ≠ γ 0/n.̌ El segundo término no tiene por qué converger cuando n tiende ainfinito; por tanto, la media muestral no tiene por qué ser consistentepara la media poblacional µ.Proceso ergódico: Un proceso estacionario en sentido débil es ergódicopara la estimación de la media µ siV ar(Ȳ ) n→∞→ µ.Ejemplos de procesos no ergódicos:Proceso constante: Un proceso en el que Y 1 = Y 2 = . . ., dondeγ h = γ 0 para cualquier h ∈ N, no es ergódico.Efectivamente, la varianza de la media muestral esV ar(ȳ) = ...Proceso periódico: El procesoY t = A cos(ωt + θ) + a t48
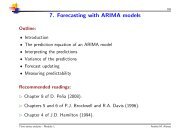
no es ergódico, puesto que las autocorrelaciones son periódicas y notienden a cero. La serie 21 es una trayectoria de un proceso de estetipo con ω = 0,4, A = 1,5 y θ = 0,5.Nota 11 Para que un proceso sea ergódico, la observaciones nuevas tienenque aportar suficiente información para que la varianza converga a 0. Estono occurre si la dependencia entre las variables es muy fuerte.Una condición necesaria pero no suficiente para que un proceso estacionariosea ergódico eslímh→∞ ρ h = 0,es decir, que la correlación entre las observaciones tienda a 0 al aumentarel retardo, de manera que las observaciones suficientemente alejadas seanprácticamente independientes.Figura 2.3: Autocorrelaciones y ergodicidadCorrelograma de un proceso ergódico Correlograma de un proceso no ergódicoSeries AR1Series CPACF0.0 0.2 0.4 0.6 0.8 1.0ACF−0.2 0.0 0.2 0.4 0.6 0.8 1.00 10 20 30 40Lag0 10 20 30 40Lag49
Propiedades de las autocovarianzas y las autocorrelaciones:La autocovarianza empírica es sesgada. Se recomienda estimar sóloautocovarianzas para retardos h ≤ n/4 para que haya al menos 4datos para estimar.La autocorrelación estimada r k tiene distribución asintóticamente normalcon media ρ k , es decirr kd→ N(ρk , V ar(r k )).Su varianza y la covarianza entre dos autocorrelaciones vienen dadaspor las fórmulas de Bartlett:V ar(r k ) = 1 ∞∑ (ρ2n i + ρ i−k ρ i+k − 4ρ k ρ i ρ i−k + 2ρ 2 iρk)2Cov(r k , r k+h ) = 1 ni=−∞∞∑i=−∞+2ρ 2 iρ k ρ k+h)(ρ i ρ i−h + ρ i−k ρ i+k+h − 2ρ k+h ρ i ρ i−k − 2ρ k ρ i ρ i−k−hEn un proceso con tendencia, el correlograma disminuye muy lentamente.En un proceso estacional, el correlograma muestra la misma periodicidadque el proceso.Nota 12 Si sólo las primeras q autocorrelaciones ρ 1 , . . .,ρ q son distintasde cero, las varianzas de las estimaciones se aproximan por( )V ar(r k ) ≈n − k q∑1 + 2 ρ 2 j , k > q.n(n + 2)Contraste de ruido blanco: Bajo la hipótesis ρ h = 0, h ∈ N, podemosaproximar V ar(r k ) ≈ 1/n para n grande. En ese caso, como r k →dN(ρ k , 1/n), entoncesr k − ρ√ k d→ N(0, 1).1/nj=1De esto, se obtiene el intervalo de confianza asintóticoIC 95% (ρ k ) = r k ∓ 2 √ n.50
Es decir, con el 95% de probabilidad, ρ h tiene que estar en el intervalo(r h − 2/ √ n, r h + 2/ √ n). Por tanto, se espera que sólo uno de cada 20coeficientes se salga de estas bandas.Ejemplo 24 Calculamos las primeras autocorrelaciones muestrales paralas leguas recorridas por Colón en su primer viaje:y =9 + 45 + 60 + ... + 31 + 59 + 4934= 31,83s 2 = (9 − 31,83)2 + (45 − 31,83) 2 + ... + (59 − 31,83) 2 + (49 − 31,83) 2= 266,9734(9 − 31,83)(45 − 31,83) + (45 − 31,83)(60 − 31,83) + ... + (59 − 31,83)(49 − 31,83)c 1 =34r 1 = c 1s 2 = 0,52(9 − 31,83)(60 − 31,83) + ... + (31 − 31,83)(49 − 31,83)c 2 = = 5,334r 2 = c 2s 2 = −0,02= 138,82Figura 2.4: Leguas diarias recorridas por Colon (izq.) y su correlograma (der.)leguas10 20 30 40 50 60ACF−0.2 0.0 0.2 0.4 0.6 0.8 1.00 5 10 15 20 25 30 35dia0 5 10 15Lag51
Figura 2.5: Ejemplo 2: Ruido blanco normal (izq.) y correlogramas (der.)ruido100 observacionesSeries ruido[1:100]200 observacionesSeries ruido−2 −1 0 1 2 3ACF−0.2 0.0 0.2 0.4 0.6 0.8 1.0ACF−0.2 0.0 0.2 0.4 0.6 0.8 1.00 50 100 150 200time0 5 10 15 20Lag0 5 10 15 20LagFigura 2.6: Lluvia en Düsseldorf, correlograma (izq.) y periodograma (der.)Series lluviaSeries: RainfallRaw PeriodogramACF−0.2 0.0 0.2 0.4 0.6 0.8 1.0spectrum2 5 10 20 50 100 500 2000 50000 5 10 15 20Lag0.0 0.1 0.2 0.3 0.4 0.5frequencybandwidth = 0.0018052
APÉNDICE A. NOTACIÓN DE OPERADORESOperador retardo: El operador retardo de una función del tiempo en uninstante proporciona la función en el instante anterior:Bx t = x t−1 .Propiedades del operador retardo: Si a, b son constantes que no dependendel tiempo y x t , y t son funciones del tiempo t, se verifica:Ba = a;B(ax t ) = aBx t ;B(ax t + by t ) = aBx t + bBy t ;B k x t = x t−k . B k se llama operador retardo de orden k.Operador diferencia: El operador diferencia proporciona la diferenciaentre la función en un instante y la misma función en el instante anterior:∇x t = x t − x t−1 .Se verifica que ∇ = 1 − B. Efectivamente,∇x t = x t − x t−1 = x t − Bx t = (1 − B)x t .Este operador se puede aplicar sucesivamente de la forma∇ 2 x t = ∇(∇x t ).Operador diferencia de orden s: Este operador proporciona la diferenciaentre la función en un instante y la misma función en s instantesantes,∇x t = x t − x t−s .Operador inverso: Sea φ(B) una función polinómica del retardo B. Sedefine el operador inverso de φ(B) como el operador φ(B) −1 que verificao equivalentemente,φ(B)φ(B) −1 x t = φ(B) −1 φ(B)x t = x tφ(B)φ(B) −1 = φ(B) −1 φ(B) = 1.Ejemplo 25 Para el operador retardo B, el operador inverso B −1 es eloperador adelanto. Efectivamente, si tomamos B −1 x t = x t+1 , entoncesB −1 Bx t = B −1 x t−1 = x t y BB −1 x t = Bx t+1 = x t .53
Ejemplo 26 Para el operador φ(B) = 1 − φB, el operador inverso es eloperador infinito dado por:φ(B) −1 = (1 − φB) −1 = 1 + φB + φ 2 B 2 + φ 3 B 3 + · · ·Efectivamente, haciendo el producto obtenemosφ(B)φ(B) −1 = (1 − φB)(1 + φB + φ 2 B 2 + φ 3 B 3 + · · · )= (1 + φB + φ 2 B 2 + φ 3 B 3 + · · · ) − (φB + φ 2 B 2 + φ 3 B 3 + · · · )= 1.54
APÉNDICE B. ECUACIONES LINEALES EN DIFERENCIASEcuación lineal en diferencias de orden k: Sea x t una función deltiempo y c una constante. Una ecuación lineal en diferencias de orden k esx t − φ 1 x t−1 − φ 2 x t−2 − · · · − φ k x t−k = c.En esta ecuación, la función x t es la incógnita y los coeficientes φ 1 , . . .,φ kson conocidos.Resolver la ecuación consiste en encontrar una función x t que sea soluciónde la ecuación.A menudo existen muchas soluciones para una ecuación lineal en diferencias.Para encontrar una solución se necesita tener k condiciones inicialesx 0 , . . .,x k−1 .Si c = 0, la ecuación en diferencias se llama homogénea.La ecuación en diferencias se puede escribir en función del operadorretardo,(1 − φ 1 B − φ 2 B 2 − · · · − φ k B k )x t = cSi llamamos φ(B) = 1 − φ 1 B − φ 2 B 2 − · · · − φ k B k , podemos escribirla ecuación comoφ(B)x t = c.El polinomio característico de la ecuación en diferencias esφ(B) = 1 − φ 1 B − φ 2 B 2 − · · · − φ k B k .Se llama ecuación característica a la ecuación homogeneaφ(B) = 0.Solución particular: Es una solución concreta de la ecuación. Por ejemplo,una constante es a menudo solución de la ecuación.Efectivamente, si reemplazamos x t = x en la ecuación, obtenemosx(1 − φ 2 − φ 2 − · · · − φ k ) = c.55
Despejando x, obtenemosx =c1 − φ 2 − φ 2 − · · · − φ k.Solución general: Es un conjunto de soluciones particulares. Si se tieneuna solución G t de la ecuación homogénea φ(B)x t = 0 y una soluciónparticular H t de la ecuación completa φ(B)x t = c, entoncesx t = G t + H tes una solución general de la ecuación completa φ(B)x t = c.Efectivamente, si reemplazamos x t = G t + H t en la ecuación completa,como φ(B)G t = 0 y φ(B)H t = c, obtenemosφ(B)(G t + H t ) = φ(B)G t + φ(B)H t = φ(B)H t = c.Ecuaciones lineales en diferencias homogéneas: Consideramos unaecuación homogénea del tipox t − φ 1 x t−1 − φ 2 x t−2 − · · · − φ k x t−k = 0⇔ (1 − φ 1 B − φ 2 B 2 − · · · − φ k B k )x t = 0⇔ φ(B)x t = 0.Ejemplo 27 (Ecuación en diferencias homogénea de primer orden)x t − φx t−1 = 0.La solución se puede encontrar de forma recursiva a partir de una condicióninicial x 0 . Aplicando la fórmula de la ecuación en diferencias para t =1, 2, 3, . . ., se tienex 1 = φx 0 ,x 2 = φx 1 = φ 2 x 0x 3 = φx 2 = φ 3 x 0...x t = φ t x 0 .Propiedades de las ecuaciones homogéneas: Si G t y H t son solucionesde la ecuación homogénea φ(B)x t = 0, A y B son constantes cualesquiera,entonces también son soluciones las siguientes:(i) AG t ;56
(ii) G t + H t ;(iii) AG t + BH t .Prueba: (i) Reemplazando x t = AG t en la ecuación, como φ(B)G t = 0,entoncesφ(B)AG t = Aφ(B)G t = 0.(ii) Reemplazando ahora x t = G t + H t en la ecuación, como φ(B)G t = 0 yφ(B)H t = 0, entoncesφ(B)(G t + H t ) = φ(B)G t + φ(B)H t = 0.(iii) Por (i), AG t y BH t son soluciones de la ecuación. Por (ii), la suma deambas también es solución. ✷Resolución de una ecuación en diferencias homogénea: Si G es elinverso de una solución de la ecuación característica φ(B) = 0, entoncesx t = AG t es solución de la ecuación homogénea, donde A ≠ 0 es una constante.Efectivamente, si reemplazamos x t = AG t en la ecuación homogénea,obtenemosA(G t − φ 1 G t−1 − φ 2 G t−2 − · · · − φ k G t−k ) = 0.Dividiendo la ecuación por A y por G t−k , se llega a una ecuación de gradok,G k − φ 1 G k−1 − φ 2 G k−2 − · · · − φ k = 0.que tiene k soluciones reales o complejas, y que pueden tener multiplicidaddistinta de uno. Así, si tenemos una solución G de esta ecuación, entoncesx t = G t verifica la ecuación homogénea.Si ahora dividimos la última ecuación por G k , se obtiene11 − φ 1G − φ 12G − · · · − φ 12 kG = 0. kSi hacemos el cambio de variable B = 1/G, la ecuación resultante es1 − φ 1 B − φ 2 B 2 − · · · − φ k B k = 0,que es exactamente la ecuación característica. Una solución B de estaecuación está relacionada con una solución de la ecuación anterior G de laforma G = 1/B.Por tanto, si B es solución de la ecuación característica, entonces x t = AG tcon G = 1/B es solución de la ecuación homogénea.57
Ejemplo 28 (Ecuación en diferencias homogénea de orden 1)x t − φx t−1 = 0.Comprobemos que la solución viene dada por x t = AG t , donde G −1 esla solución de la ecuación característica, y A viene determinada por lascondiciones iniciales.Solución de la ecuación característica:1 − φB = 0 ⇔ 1 − φB = 0 ⇔ B = 1/φ.Por tanto, G = φ y la solución sería x t = Aφ t . Reemplazando ahora lasolución inicial en la ecuación, obtenemos x 0 = Aφ 0 = A. Por tanto, lasolución es x t = x 0 φ t .Solución general de una ecuación en diferencias homogénea deorden k: Sean G 1 , . . .,G p las inversas de las soluciones reales distintasde la ecuación característica φ(B) = 0, con multiplicidades m 1 , . . .,m p .Entonces la solución general de la ecuación en diferencias homogénea esx t =p∑(A i1 + A i2 t + · · · + A imi t mi−1 )G t i.i=1Obsérvese que si todas las raíces G 1 , . . .,G k de la ecuación característicatienen multiplicidad m i = 1, i = 1, . . .,k, entonces la solución esx t = A 11 G t 1 + · · · + A k1 G t 1.Ejemplo 29 (Ecuación en diferencias homogénea de orden 2)x t − φ 1 x t−1 − φ 2 x t−2 = 0.La solución depende de las raíces de la ecuaciónque vienen dadas porG 2 − φ 1 G − φ 2 = 0,G = φ 1 ∓ √ φ 2 1 + 4φ 2.2(a) Si φ 2 > −φ 2 1/4, hay dos soluciones reales distintas G 1 y G 2 . Entoncesla solución de la ecuación homogénea esx t = A 1 G t 1 + A 2 G t 2.58
Las constantes A 1 y A 2 se obtienen a partir de dos condiciones inicialesx 0 y x 1 . Tomando t = 0 y t = 1 en la solución x t , obtenemos:x 0 = A 1 + A 2x 1 = A 1 G 1 + A 2 G 2 .A 1 y A 2 se obtienen despejando de dicho sistema lineal.(b) Si φ 2 = −φ 2 1/4, hay una solución G con multiplicidad 2. Entonces lasolución de la ecuación homogénea esx t = (A 1 + A 2 t)G t .(c) Si φ 2 < −φ 2 1/4, entonces tenemos dos soluciones complejas conjugadasG 1 = a + bi y G 2 = a − bi. Entoncesx t = A 1 (a + bi) t + A 2 (a − bi) t .Las constantes A 1 y A 2 se determinan a partir de las condiciones inicialesx 0 y x 1 . Tomando t = 0 y t = 1 en la solución x t se obtiene elsistemax 0 = A 1 + A 2x 1 = A 1 (a + bi) + A 2 (a − bi)Las soluciones son números complejos conjugados. Los escribimos dela formaEstos números verificanA 1 = 1 2 B + 1 2 CiA 2 = 1 2 B − 1 2 CiA 1 + A 2 = BA 1 − A 2 = CiAhora escribimos las soluciones de la ecuación en coordenadas polares:a = r coswb = r sen w59
donde r 2 = a 2 + b 2 . Reemplazando esto en x t , obtenemosx t= A 1 (r cosw + ir sen w) t + A 2 (r cos w − ir sen w) t= r [ t A 1 (cosw + i sen w) t + A 2 (cos w − i sen w) t]= r t [A 1 (cos wt + i sen wt) + A 2 (coswt − i sen wt)]= r t [(A 1 + A 2 ) coswt + i(A 1 − A 2 ) senwt]= r t (B coswt − C sen wt).Si ahora hacemos el cambioB = A senθC = A cosθSustituyendo esto en la solución x t y aplicando la fórmula para el senode una diferencia, obtenemosx t= r t [A cosθ cos wt − A sen θ sen wt]= A r t sen(wt − θ),que es una función sinusoidad con amplitud variable con el tiempo A r ty ángulo de desfase −θ. Si |r| < 1, la amplitud decrece con el tiempode forma exponencial.Condiciones de estabilidad de las soluciones de una ecuación homogénea:Consideremos una ecuación en diferencias homogénea de ordenk,x t − φ 1 x t−1 − φ 2 x t−2 − · · · − φ k x t−k = 0.Se dice que la solución x t es estable si verifica:−∞ < límt→∞x t < ∞.Asumimos por simplicidad que las raíces de la ecuación característicaG −11 , . . .,G−1 ktienen multiplicidad 1. La solución de la ecuación en diferenciases entonces:x t = A 1 G t 1 + · · · + A k G t k.De esta solución, se deduce que las condiciones de estabilidad son|G i | ≤ 1, i = 1, . . .,k.Es conveniente escribir estas condiciones en función de los coeficientes dela ecuación en diferencias.60
Ejemplo 30 (Ecuación en diferencias homogénea de primer orden)La solución x t = x 0 φ t de una ecuación en diferencias homogénea de primerorden es estable si |φ| < 1.Ejemplo 31 (Ecuación en diferencias homogénea de orden 2) Tenemosque diferenciar los mismos tres casos que en el Ejemplo 29.(a) φ 2 > −φ 2 1/4: Hay dos raíces reales distintas y x t = A 1 G t 1 + A 2 G t 2,donde G 1 y G 2 son soluciones deque vienen dadas porG 2 − φ 1 G − φ 2 = 0,G = φ 1 ∓ √ φ 2 1 + 4φ 2.2La solución x t es estable si |G 1 | < 1 y |G 2 | < 1. Esccribimos dichascondiciones en función de los coeficientes de la ecuación homogénea:Como √ φ 2 1 + 4φ 2 > 0, entonces la solución con el signo negativo esmenor que la solución con el signo positivo. Por tanto, la soluciónmayor debe verificarφ 1 + √ φ 2 1 + 4φ √2< 1 ⇔ φ 2 12+ 4φ 2 < 2 − φ 1 ⇔ φ 2 1 + 4φ 2 < 4 − 4φ 1 + φ 2 1⇔ φ 1 + φ 2 < 1.La solución menor debe cumplirφ 1 − √ φ 2 1 + 4φ √2> −1 ⇔ φ 2 12+ 4φ 2 < 2 + φ 1 ⇔ φ 2 1 + 4φ 2 < 4 + 4φ 1 + φ 2 1⇔ φ 2 − φ 1 < 1.Es decir, la solución es estable siφ 1 + φ 2 < 1 y φ 2 − φ 1 < 1.(b) φ 2 = −φ 2 1/4: Hay una solución real G con multiplicidad 2, y la soluciónes x t = (A 1 + A 2 t)G t . La solución viene dada por G = φ 1 /2, con locualx t = A 1 (φ 1 /2) t + A 2 t(φ 1 /2) t .El primer término es estable si |φ 1 | < 2. En ese caso, se cumplelím t(φ 1/2) t = 0,t→∞61
con lo que el segundo término también es estable. Como φ 2 = −φ 2 1/4,donde φ 2 1 < 4, o equivalentemente, −φ 2 1 > −4, entoncesφ 2 = −φ 2 1/4 > −1.Por tanto, las condiciones de estabilidad son−2 < φ 1 < 2 y − 1 < φ 2 < 0.(c) φ 2 < −φ 2 1/4: Las soluciones son complejas conjugadas G 1 = a + bi yG 2 = a − bi, y x t se puede escribir comox t = A r t sen(wt − θ).Esta solución es estable si la amplitud Ar t converge a cero, y estoocurre cuando |r| < 1. Escribimos esta condición en función de loscoeficientes de la ecuación homogénea. Las soluciones G 1 y G 2 se obtienena partir deEs decir,G = φ 1 ∓ √ φ 2 1 + 4φ 2.2G 1 = a + bi = φ 1 + i √ |φ 2 1 + 4φ 2|2G 2 = a − bi = φ 1 − i √ |φ 2 1 + 4φ 2|2Por tanto, el módulo de ambas soluciones esr 2 = a 2 + b 2 = φ24 + |φ2 1 + 4φ 2 |4= φ24 − φ2 1 + 4φ 24= −φ 2 .Por tanto, r = √ −φ 2 , y como φ 2 < −φ 2 1/4 < 0, la solución es establesi −1 < φ 2 ≤ 0. Como |φ 1 | < 2 √ −φ 2 , entonces también debe ser|φ 1 | < 2. Por tanto, la solución x t es estable si−2 < φ 1 < 2 y − 1 < φ 2 ≤ 0.62
Ecuación en diferencias con término de error: Es una ecuación deltipox t = c + φ 1 x t−1 − φ 2 x t−2 − · · · − φ k x t−k + ǫ t .Ejemplo 32 Considera la ecuación de primer ordenx t = c + φx t−1 + ǫ t .A partir de las condiciones iniciales x 0 y x 1 y de forma recurrente, calculamosla solución de la ecuación:x 1 = c + φx 0 + ǫ 1 ;x 2 = c + φx 1 + ǫ 2= c + φ(c + φx 0 + ǫ 1 ) + ǫ 2= c(1 + φ) + φ 2 x 0 + (φǫ 1 + ǫ 2 );x 3 = c + φx 2 + ǫ 3x t= c + φ [ c(1 + φ) + φ 2 x 0 + (φǫ 1 + ǫ 2 ) ] + ǫ 3= c(1 + φ + φ 2 ) + φ 3 x 0 + φ 2 ǫ 1 + φǫ 2 + ǫ 3...∑t−1∑t−1= c φ i + φ t x 0 + φ i ǫ t−ii=0t−1∑= c φ i + φ t x 0 +i=0i=0[ ∑t−1i=0(φB) i ]ǫ t .Suponiendo |φ| < 1 y utilizando la fórmula de una suma finita de potencias,∑t−1i=0y sustituyendo esto en x t , obtenemosx t =c (1 − φ + x 0 −φ i = 1 − φt1 − φ ,c1 − φ)φ t +∑t−1i=0φ i ǫ t−i .Obsérvese que esta solución es del tipo[ ]∞∑x t = AG t + b 0 + α i ǫ t−i = Sol. general de la ec. homogénea+Sol. particular.i=0Esta es la clave del método de resolución de este tipo de ecuaciones endiferencias.63
Resolución de ecuaciones en diferencias con término de error: Elmétodo consiste en:(a) Encontrar la solución general de la ecuación en diferencias homogénea,que omite la constante y el término de error;(b) Encontrar una solución particular de la ecuacíón completa. Habitualmentese prueba con una solución del tipo∞∑x t = b 0 + α i ǫ t−i .Las constantes b 0 y α i se obtienen reemplazando esta solución en laecuación completa, agrupando los términos con el mismo término deerror y determinando los coeficientes de dichos términos de error deforma recursiva.(c) Sumar las dos soluciones.Ejemplo 33 Aplicamos este método a la ecuación del Ejemplo 32,i=0x t = c + φx t−1 + ǫ t .(a) Solución general de la ecuación homogéneax t − φx t−1 = 0 ⇔ (1 − φ 1 B)x t = 0.La solución de la ecuación característica es B = 1/φ. Por tanto, lasolución es general es G t = Aφ t .(b) Solución particular de la ecuación completa. Probamos con la soluciónH t = b 0 +∞∑α i ǫ t−i .Las constantes de la ecuación particular b 0 , α i , i = 1, 2, . . ., se obtienenreemplazando esta solución en la ecuación completa( )∞∑∞∑b 0 + α i ǫ t−i = c + φ b 0 + α i ǫ t−i + ǫ ti=0i=0i=0Desarrollando los sumatorios, la ecuación esb 0 +α 0 ǫ t +α 1 ǫ t−1 +α 2 ǫ t−2 +· · · = c+φ (b 0 + α 0 ǫ t + α 1 ǫ t−1 + α 2 ǫ t−2 + · · · )+ǫ t .64
Igualando los términos independientes, los términos en ǫ t , los términosen ǫ t−1 , etc., de cada lado de la igualdad, obtenemosb 0 = c + φb 0 ⇔ b 0 = c/(1 − φ);α 0 = 1;α 1 = φα 0 = φ;α 2 = φα 1 = φ 2 ;...α i = φ i .Por tanto, la solución particular esH t =(c) Finalmente, la solución general esx t = G t + H t =c∞1 − φ + ∑φ i ǫ t−i .i=0c∞1 − φ + ∑φ i ǫ t−i + Aφ t .La constante A se determina a partir de una condición inicial x 0 .Tomando t = 0 en la ecuación, obtenemosDespejando A,x 0 =i=0c∞1 − φ + ∑φ i ǫ −i + A.i=0A = x 0 −c∞1 − φ + ∑φ i ǫ −i .i=065