Universidad de - Escuela Superior de Informática (UCLM ...
Universidad de - Escuela Superior de Informática (UCLM ... Universidad de - Escuela Superior de Informática (UCLM ...
Ejemplos Sistemas de vídeo vigilancia.CAPÍTULO 3. ANTECEDENTES.las vistas de cada cámara se solapan, están muy distantes, etc. Puede integrar un modeloque detecte la actividad que aparece en la escena observada. El método está basado enuna correspondencia en la detección de los objetos captados por las distintas vistas de lascámaras. El método permite comunicarse con las cámaras adyacentes, aunque las vistasde éstas no se solapen. También proporciona posibles movimientos de objetos en aquellosespacios o huecos entre las distintas vistas de la cámara.La detección automática de actividades sospechosas es el mayor requisito de lossistemas de videovigilancia, debido a la incapacidad del se humano de mantener su atenciónante un monitor y detectar las situaciones sospechosas durante un largo período de tiempo.Se realiza un modelado de las trayectorias normales y aprende situaciones normalesutilizando un modelo probabilístico. Posteriormente se relaciona el comportamiento atípicocon situaciones anormales en la escena. El modelado de la escena se construye dependiendode las acciones que se produzcan en la escena después de un período de observación.Posteriormente se asignan patrones de comportamientos típicos o normales. Se incorporaun método de detección automática de situaciones atípicas que pueden ser sospechosabasándose en trayectorias descritas por los modelos ocultos de Markov (RBHMM).Los estados de un RBHMM son definidos como los nodos de todos los modelos detrayectorias aceptados, añadiendo dos estados extra:“Estado fuera de cualquier nodo”: Este estado indica que la situación reconocidano se encuentra entre las situaciones modeladas anteriormente.“Estado final”: Estado que indica la conclusión de la monitorización de la escena.Esto permite derivar los nodos en trayectorias unidireccionales, de manera que permiteincorporar la información de direccionalidad a cada nodo.3.7.6. Interpretación semántica de actividades de objetos en sistemasde vídeo vigilancia.Jiangung Lou, Qifeng Liu, Tieniu Tan and Weiming Hu [JLH02], propusieron unframework de interpretación semántica del comportamiento de peatones y vehículos. Lastrayectorias tanto de peatones como de vehículos son almacenadas tras un proceso deseguimiento (tracking) y se realiza un análisis utilizando una clasificación dinámica queestá basada en una interpretación semántica de alto nivel.En un sistema de videovigilancia, las trayectorias son adquiridas utilizando algoritmosde seguimiento de bajo nivel. En este modelo se centra únicamente en la interpretación68
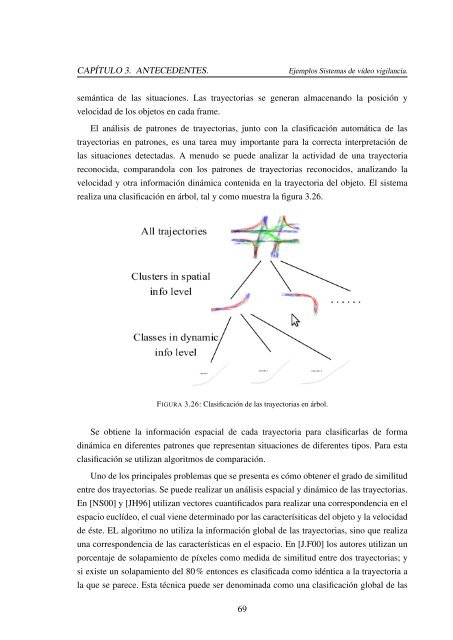
CAPÍTULO 3. ANTECEDENTES.Ejemplos Sistemas de vídeo vigilancia.semántica de las situaciones. Las trayectorias se generan almacenando la posición yvelocidad de los objetos en cada frame.El análisis de patrones de trayectorias, junto con la clasificación automática de lastrayectorias en patrones, es una tarea muy importante para la correcta interpretación delas situaciones detectadas. A menudo se puede analizar la actividad de una trayectoriareconocida, comparandola con los patrones de trayectorias reconocidos, analizando lavelocidad y otra información dinámica contenida en la trayectoria del objeto. El sistemarealiza una clasificación en árbol, tal y como muestra la figura 3.26.FIGURA 3.26: Clasificación de las trayectorias en árbol.Se obtiene la información espacial de cada trayectoria para clasificarlas de formadinámica en diferentes patrones que representan situaciones de diferentes tipos. Para estaclasificación se utilizan algoritmos de comparación.Uno de los principales problemas que se presenta es cómo obtener el grado de similitudentre dos trayectorias. Se puede realizar un análisis espacial y dinámico de las trayectorias.En [NS00] y [JH96] utilizan vectores cuantificados para realizar una correspondencia en elespacio euclídeo, el cual viene determinado por las caracterísiticas del objeto y la velocidadde éste. EL algoritmo no utiliza la información global de las trayectorias, sino que realizauna correspondencia de las características en el espacio. En [J.F00] los autores utilizan unporcentaje de solapamiento de píxeles como medida de similitud entre dos trayectorias; ysi existe un solapamiento del 80% entonces es clasificada como idéntica a la trayectoria ala que se parece. Esta técnica puede ser denominada como una clasificación global de las69
- Page 40 and 41: Estructura del documentoCAPÍTULO 1
- Page 42 and 43: CAPÍTULO 2. OBJETIVOSserán almace
- Page 45 and 46: 3Antecedentes.3.1. Introducción ge
- Page 47 and 48: CAPÍTULO 3. ANTECEDENTES.Introducc
- Page 49 and 50: CAPÍTULO 3. ANTECEDENTES.Fundament
- Page 51 and 52: CAPÍTULO 3. ANTECEDENTES.Fundament
- Page 53 and 54: CAPÍTULO 3. ANTECEDENTES.Fundament
- Page 55 and 56: CAPÍTULO 3. ANTECEDENTES.Fundament
- Page 57 and 58: CAPÍTULO 3. ANTECEDENTES.Fundament
- Page 59 and 60: CAPÍTULO 3. ANTECEDENTES.Fundament
- Page 61 and 62: CAPÍTULO 3. ANTECEDENTES.Estado de
- Page 63 and 64: CAPÍTULO 3. ANTECEDENTES.Estado de
- Page 65 and 66: CAPÍTULO 3. ANTECEDENTES.Estado de
- Page 67 and 68: CAPÍTULO 3. ANTECEDENTES.Estado de
- Page 69 and 70: CAPÍTULO 3. ANTECEDENTES.Estado de
- Page 71 and 72: CAPÍTULO 3. ANTECEDENTES.Estado de
- Page 73 and 74: CAPÍTULO 3. ANTECEDENTES.Necesidad
- Page 75 and 76: CAPÍTULO 3. ANTECEDENTES.Tendencia
- Page 77 and 78: CAPÍTULO 3. ANTECEDENTES.Análisis
- Page 79 and 80: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 81 and 82: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 83 and 84: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 85 and 86: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 87 and 88: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 89: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 93 and 94: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 95 and 96: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 97 and 98: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 99 and 100: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 101 and 102: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 103: CAPÍTULO 3. ANTECEDENTES.Ejemplos
- Page 106 and 107: Metodología de desarrolloCAPÍTULO
- Page 108 and 109: Tecnologías y herramientas utiliza
- Page 110 and 111: Tecnologías y herramientas utiliza
- Page 113 and 114: 5Arquitectura de AtravelEn este cap
- Page 115 and 116: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 117 and 118: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 119 and 120: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 121 and 122: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 123 and 124: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 125 and 126: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 127 and 128: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 129 and 130: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 131 and 132: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 133 and 134: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 135 and 136: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 137 and 138: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 139 and 140: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
CAPÍTULO 3. ANTECEDENTES.Ejemplos Sistemas <strong>de</strong> ví<strong>de</strong>o vigilancia.semántica <strong>de</strong> las situaciones. Las trayectorias se generan almacenando la posición yvelocidad <strong>de</strong> los objetos en cada frame.El análisis <strong>de</strong> patrones <strong>de</strong> trayectorias, junto con la clasificación automática <strong>de</strong> lastrayectorias en patrones, es una tarea muy importante para la correcta interpretación <strong>de</strong>las situaciones <strong>de</strong>tectadas. A menudo se pue<strong>de</strong> analizar la actividad <strong>de</strong> una trayectoriareconocida, comparandola con los patrones <strong>de</strong> trayectorias reconocidos, analizando lavelocidad y otra información dinámica contenida en la trayectoria <strong>de</strong>l objeto. El sistemarealiza una clasificación en árbol, tal y como muestra la figura 3.26.FIGURA 3.26: Clasificación <strong>de</strong> las trayectorias en árbol.Se obtiene la información espacial <strong>de</strong> cada trayectoria para clasificarlas <strong>de</strong> formadinámica en diferentes patrones que representan situaciones <strong>de</strong> diferentes tipos. Para estaclasificación se utilizan algoritmos <strong>de</strong> comparación.Uno <strong>de</strong> los principales problemas que se presenta es cómo obtener el grado <strong>de</strong> similitu<strong>de</strong>ntre dos trayectorias. Se pue<strong>de</strong> realizar un análisis espacial y dinámico <strong>de</strong> las trayectorias.En [NS00] y [JH96] utilizan vectores cuantificados para realizar una correspon<strong>de</strong>ncia en elespacio euclí<strong>de</strong>o, el cual viene <strong>de</strong>terminado por las caracterísiticas <strong>de</strong>l objeto y la velocidad<strong>de</strong> éste. EL algoritmo no utiliza la información global <strong>de</strong> las trayectorias, sino que realizauna correspon<strong>de</strong>ncia <strong>de</strong> las características en el espacio. En [J.F00] los autores utilizan unporcentaje <strong>de</strong> solapamiento <strong>de</strong> píxeles como medida <strong>de</strong> similitud entre dos trayectorias; ysi existe un solapamiento <strong>de</strong>l 80% entonces es clasificada como idéntica a la trayectoria ala que se parece. Esta técnica pue<strong>de</strong> ser <strong>de</strong>nominada como una clasificación global <strong>de</strong> las69


