Universidad de - Escuela Superior de Informática (UCLM ...
Universidad de - Escuela Superior de Informática (UCLM ... Universidad de - Escuela Superior de Informática (UCLM ...
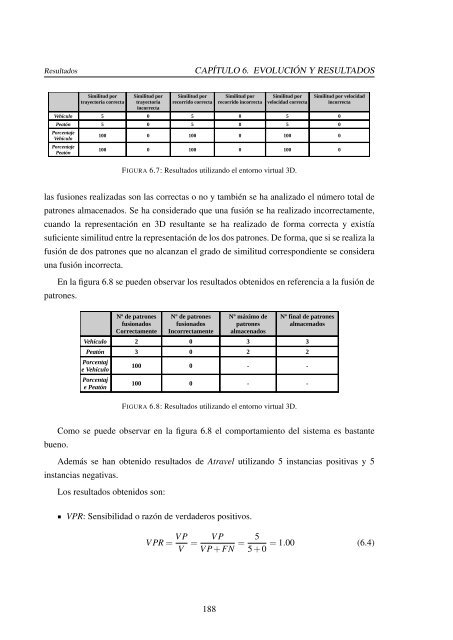
ResultadosCAPÍTULO 6. EVOLUCIÓN Y RESULTADOSSimilitud portrayectoria correctaSimilitud portrayectoriaincorrectaSimilitud porrecorrido correctaSimilitud porrecorrido incorrectaSimilitud porvelocidad correctaSimilitud por velocidadincorrectaVehículo 5 0 5 0 5 0Peatón 5 0 5 0 5 0PorcentajeVehículoPorcentajePeatón100 0 100 0 100 0100 0 100 0 100 0FIGURA 6.7: Resultados utilizando el entorno virtual 3D.las fusiones realizadas son las correctas o no y también se ha analizado el número total depatrones almacenados. Se ha considerado que una fusión se ha realizado incorrectamente,cuando la representación en 3D resultante se ha realizado de forma correcta y existíasuficiente similitud entre la representación de los dos patrones. De forma, que si se realiza lafusión de dos patrones que no alcanzan el grado de similitud correspondiente se considerauna fusión incorrecta.En la figura 6.8 se pueden observar los resultados obtenidos en referencia a la fusión depatrones.Nº de patronesfusionadosCorrectamenteNº de patronesfusionadosIncorrectamenteNº máximo depatronesalmacenadosNº final de patronesalmacenadosVehículo 2 0 3 3Peatón 3 0 2 2Porcentaje VehículoPorcentaje Peatón100 0 - -100 0 - -FIGURA 6.8: Resultados utilizando el entorno virtual 3D.Como se puede observar en la figura 6.8 el comportamiento del sistema es bastantebueno.Además se han obtenido resultados de Atravel utilizando 5 instancias positivas y 5instancias negativas.Los resultados obtenidos son:VPR: Sensibilidad o razón de verdaderos positivos.V PR = V PV = V PV P + FN = 5 = 1.00 (6.4)5 + 0188
CAPÍTULO 6. EVOLUCIÓN Y RESULTADOSResultadosVerdadero Positivo (VP) = 5 Falso Positivo (FP) = 0 5TotalFalso Negativo (FN)= 0 Verdadero Negativo (VN) = 5 55 5 10FIGURA 6.9: Resultados de la aplicación en el entorno virtual.FPR: Sensibilidad o razón de falsos negativos.ACC: Precisión o exactitud.FPR = FPN = FPFP +V N = 0 = 0.00 (6.5)50 + 0ACC =(V P +V N)(P + N)=50 + 50100= 1.00 (6.6)A continuación en la figura B.8, se realiza una representación gráfica de los resultadosobtenidos utilizando un entorno virtual.Entorno virtualEspecificidad100%80%60%40%20%0%0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%SensibilidadFIGURA 6.10: Gráfico de curva ROC en el entorno virtual (ver imagen a color en Anexo B).Los resultados obtenidos utilizando Atravel son de caracter orientativo y puede que laaplicación se comporte de diferente manera ante circunstancias diferentes.6.2.2. Resultados con entorno realLa realización de pruebas en un entorno real se ha desplegado el sistema utilizandocámaras sobre una escena que representa un cruce de calles situado en el municipio deAlmodóvar del Campo. Para la captación de las imágenes se han utilizado dos cámaras189
- Page 159 and 160: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 161 and 162: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 163 and 164: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 165 and 166: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 167 and 168: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 169 and 170: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 171 and 172: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 173 and 174: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 175 and 176: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 177 and 178: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 179 and 180: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 181 and 182: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 183 and 184: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 185 and 186: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 187 and 188: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 189 and 190: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 191 and 192: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 193: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 196 and 197: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 198 and 199: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 200 and 201: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 202 and 203: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 204 and 205: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 206 and 207: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 208 and 209: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 212 and 213: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 214 and 215: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 216 and 217: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 218 and 219: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 220 and 221: CAPÍTULO 7. CONCLUSIONES Y PROPUES
- Page 222 and 223: Objetivos alcanzadosCAPÍTULO 7. CO
- Page 224 and 225: Objetivos alcanzadosCAPÍTULO 7. CO
- Page 226 and 227: Propuestas de trabajo futuroCAPÍTU
- Page 228 and 229: Conclusiones personalesCAPÍTULO 7.
- Page 231 and 232: AManual de referenciaA.1.Manual de
- Page 233 and 234: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 235 and 236: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 237 and 238: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 239 and 240: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 241 and 242: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 243 and 244: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 245 and 246: BImágenes a colorv zvu zuv xXv yYF
- Page 247 and 248: APÉNDICE B. IMÁGENES A COLORBound
- Page 249 and 250: APÉNDICE B. IMÁGENES A COLORFIGUR
- Page 251 and 252: Bibliografía[ABS][AMV09][And89]Ale
- Page 253 and 254: BIBLIOGRAFÍABIBLIOGRAFÍA[Joh98] N
ResultadosCAPÍTULO 6. EVOLUCIÓN Y RESULTADOSSimilitud portrayectoria correctaSimilitud portrayectoriaincorrectaSimilitud porrecorrido correctaSimilitud porrecorrido incorrectaSimilitud porvelocidad correctaSimilitud por velocidadincorrectaVehículo 5 0 5 0 5 0Peatón 5 0 5 0 5 0PorcentajeVehículoPorcentajePeatón100 0 100 0 100 0100 0 100 0 100 0FIGURA 6.7: Resultados utilizando el entorno virtual 3D.las fusiones realizadas son las correctas o no y también se ha analizado el número total <strong>de</strong>patrones almacenados. Se ha consi<strong>de</strong>rado que una fusión se ha realizado incorrectamente,cuando la representación en 3D resultante se ha realizado <strong>de</strong> forma correcta y existíasuficiente similitud entre la representación <strong>de</strong> los dos patrones. De forma, que si se realiza lafusión <strong>de</strong> dos patrones que no alcanzan el grado <strong>de</strong> similitud correspondiente se consi<strong>de</strong>rauna fusión incorrecta.En la figura 6.8 se pue<strong>de</strong>n observar los resultados obtenidos en referencia a la fusión <strong>de</strong>patrones.Nº <strong>de</strong> patronesfusionadosCorrectamenteNº <strong>de</strong> patronesfusionadosIncorrectamenteNº máximo <strong>de</strong>patronesalmacenadosNº final <strong>de</strong> patronesalmacenadosVehículo 2 0 3 3Peatón 3 0 2 2Porcentaje VehículoPorcentaje Peatón100 0 - -100 0 - -FIGURA 6.8: Resultados utilizando el entorno virtual 3D.Como se pue<strong>de</strong> observar en la figura 6.8 el comportamiento <strong>de</strong>l sistema es bastantebueno.A<strong>de</strong>más se han obtenido resultados <strong>de</strong> Atravel utilizando 5 instancias positivas y 5instancias negativas.Los resultados obtenidos son:VPR: Sensibilidad o razón <strong>de</strong> verda<strong>de</strong>ros positivos.V PR = V PV = V PV P + FN = 5 = 1.00 (6.4)5 + 0188


