Universidad de - Escuela Superior de Informática (UCLM ...
Universidad de - Escuela Superior de Informática (UCLM ... Universidad de - Escuela Superior de Informática (UCLM ...
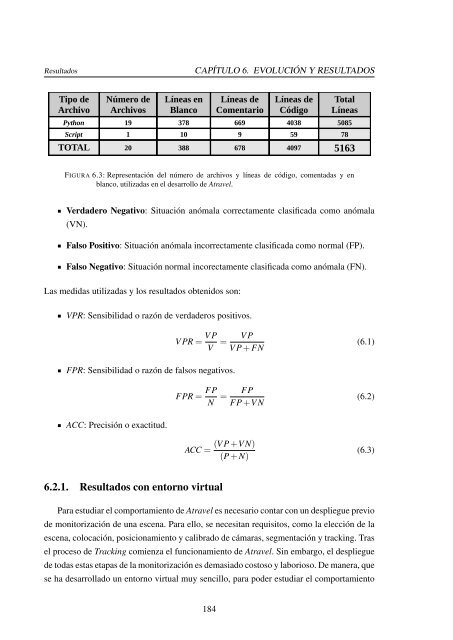
ResultadosCAPÍTULO 6. EVOLUCIÓN Y RESULTADOSTipo deArchivoNúmero deArchivosLíneas enBlancoLíneas deComentarioLíneas deCódigoTotalLíneasPython 19 378 669 4038 5085Script 1 10 9 59 78TOTAL 20 388 678 4097 5163FIGURA 6.3: Representación del número de archivos y líneas de código, comentadas y enblanco, utilizadas en el desarrollo de Atravel.Verdadero Negativo: Situación anómala correctamente clasificada como anómala(VN).Falso Positivo: Situación anómala incorrectamente clasificada como normal (FP).Falso Negativo: Situación normal incorectamente clasificada como anómala (FN).Las medidas utilizadas y los resultados obtenidos son:VPR: Sensibilidad o razón de verdaderos positivos.V PR = V PV = V PV P + FN(6.1)FPR: Sensibilidad o razón de falsos negativos.FPR = FPN = FPFP +V N(6.2)ACC: Precisión o exactitud.ACC =(V P +V N)(P + N)(6.3)6.2.1. Resultados con entorno virtualPara estudiar el comportamiento de Atravel es necesario contar con un despliegue previode monitorización de una escena. Para ello, se necesitan requisitos, como la elección de laescena, colocación, posicionamiento y calibrado de cámaras, segmentación y tracking. Trasel proceso de Tracking comienza el funcionamiento de Atravel. Sin embargo, el desplieguede todas estas etapas de la monitorización es demasiado costoso y laborioso. De manera, quese ha desarrollado un entorno virtual muy sencillo, para poder estudiar el comportamiento184
CAPÍTULO 6. EVOLUCIÓN Y RESULTADOSResultadosde la aplicación a medida que se han ido incorporando los diferentes módulos que componenla aplicación.Para obtener los resultados tras la etapa de Tracking se ha empleado un script quepermite determinar en un archivo de texto, todos los datos necesarios para el análisis delcomportamiento de objetos llevado a cabo por Atravel (véase la sección 5.1.1). El modeladode la escena virtual ha sido elaborado utilizando la herramienta Blender.La escena virtual utilizada está compuesta de tres cámaras virtuales, un plano, y unconjunto de bounding box o cajas que se desplazan a lo largo del plano (véase figura 6.4).FIGURA 6.4: Representación del entorno virtual 3D.La prueba virtual ha tenido una duración de 2000 frames, en la cuál se han analizadolos comportamientos de los diez objetos que han sido creados para la prueba de losdiferentes. Debido a que la realización de esta prueba virtual tiene como objetivo principalcomprobar el correcto funcionamiento de cada uno de los módulos, los resultados obtenidosson totalmente correctos, ya que no aparecen factores externos que puedan distorsionar lamonitorización y el análisis de comportamientos de los objetos.Se trata de un escenario ideal, en la que se realiza un desplazamiento de diez objetos pordiferentes zonas de la escena. Cinco de los objetos son de tipo vehículos y los otros cincoobjetos son de tipo peatón.En la figura 6.5, se detallan los resultados obtenidos tras la detección de los objetossobre la escena. Hace referencia al número de trayectorias detectadas correctamente en elentorno. Esto significa, que el sistema ha detectado al objeto sobre la escena con su tipo ydimensiones correctamente, es decir, sin aparecer errores en la detección del objeto, bienpor oclusión o por error en etapas anteriores del sistema.También se ha comprobado el comportamiento del sistema en la representación de latrayectoria, recorrido y velocidad. La representación de éstos submódulos resulta de granimportancia para el análisis del comportamiento de los objetos. Se ha analizado que larepresentación de estas tres funcionalidades para comprobar si existe correspondencia entre185
- Page 155 and 156: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 157 and 158: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 159 and 160: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 161 and 162: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 163 and 164: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 165 and 166: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 167 and 168: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 169 and 170: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 171 and 172: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 173 and 174: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 175 and 176: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 177 and 178: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 179 and 180: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 181 and 182: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 183 and 184: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 185 and 186: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 187 and 188: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 189 and 190: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 191 and 192: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 193: CAPÍTULO 5. ARQUITECTURA DE ATRAVE
- Page 196 and 197: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 198 and 199: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 200 and 201: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 202 and 203: EvoluciónCAPÍTULO 6. EVOLUCIÓN Y
- Page 204 and 205: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 208 and 209: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 210 and 211: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 212 and 213: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 214 and 215: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 216 and 217: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 218 and 219: ResultadosCAPÍTULO 6. EVOLUCIÓN Y
- Page 220 and 221: CAPÍTULO 7. CONCLUSIONES Y PROPUES
- Page 222 and 223: Objetivos alcanzadosCAPÍTULO 7. CO
- Page 224 and 225: Objetivos alcanzadosCAPÍTULO 7. CO
- Page 226 and 227: Propuestas de trabajo futuroCAPÍTU
- Page 228 and 229: Conclusiones personalesCAPÍTULO 7.
- Page 231 and 232: AManual de referenciaA.1.Manual de
- Page 233 and 234: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 235 and 236: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 237 and 238: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 239 and 240: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 241 and 242: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 243 and 244: APÉNDICE A. MANUAL DE REFERENCIAMa
- Page 245 and 246: BImágenes a colorv zvu zuv xXv yYF
- Page 247 and 248: APÉNDICE B. IMÁGENES A COLORBound
- Page 249 and 250: APÉNDICE B. IMÁGENES A COLORFIGUR
- Page 251 and 252: Bibliografía[ABS][AMV09][And89]Ale
- Page 253 and 254: BIBLIOGRAFÍABIBLIOGRAFÍA[Joh98] N
ResultadosCAPÍTULO 6. EVOLUCIÓN Y RESULTADOSTipo <strong>de</strong>ArchivoNúmero <strong>de</strong>ArchivosLíneas enBlancoLíneas <strong>de</strong>ComentarioLíneas <strong>de</strong>CódigoTotalLíneasPython 19 378 669 4038 5085Script 1 10 9 59 78TOTAL 20 388 678 4097 5163FIGURA 6.3: Representación <strong>de</strong>l número <strong>de</strong> archivos y líneas <strong>de</strong> código, comentadas y enblanco, utilizadas en el <strong>de</strong>sarrollo <strong>de</strong> Atravel.Verda<strong>de</strong>ro Negativo: Situación anómala correctamente clasificada como anómala(VN).Falso Positivo: Situación anómala incorrectamente clasificada como normal (FP).Falso Negativo: Situación normal incorectamente clasificada como anómala (FN).Las medidas utilizadas y los resultados obtenidos son:VPR: Sensibilidad o razón <strong>de</strong> verda<strong>de</strong>ros positivos.V PR = V PV = V PV P + FN(6.1)FPR: Sensibilidad o razón <strong>de</strong> falsos negativos.FPR = FPN = FPFP +V N(6.2)ACC: Precisión o exactitud.ACC =(V P +V N)(P + N)(6.3)6.2.1. Resultados con entorno virtualPara estudiar el comportamiento <strong>de</strong> Atravel es necesario contar con un <strong>de</strong>spliegue previo<strong>de</strong> monitorización <strong>de</strong> una escena. Para ello, se necesitan requisitos, como la elección <strong>de</strong> laescena, colocación, posicionamiento y calibrado <strong>de</strong> cámaras, segmentación y tracking. Trasel proceso <strong>de</strong> Tracking comienza el funcionamiento <strong>de</strong> Atravel. Sin embargo, el <strong>de</strong>spliegue<strong>de</strong> todas estas etapas <strong>de</strong> la monitorización es <strong>de</strong>masiado costoso y laborioso. De manera, quese ha <strong>de</strong>sarrollado un entorno virtual muy sencillo, para po<strong>de</strong>r estudiar el comportamiento184


