Cinemática inversa de un manipulador robótico con redes neuronales
Cinemática inversa de un manipulador robótico con redes neuronales
Cinemática inversa de un manipulador robótico con redes neuronales

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ENINVIE Encuentro <strong>de</strong> Investigación en IE, 4—5 Marzo, 2004 32<br />
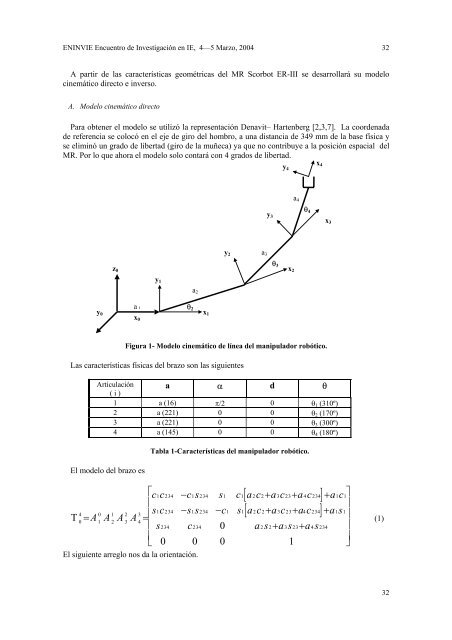
A partir <strong>de</strong> las características geométricas <strong>de</strong>l MR Scorbot ER-III se <strong>de</strong>sarrollará su mo<strong>de</strong>lo<br />
cinemático directo e inverso.<br />
A. Mo<strong>de</strong>lo cinemático directo<br />
Para obtener el mo<strong>de</strong>lo se utilizó la representación Denavit– Hartenberg [2,3,7]. La coor<strong>de</strong>nada<br />
<strong>de</strong> referencia se colocó en el eje <strong>de</strong> giro <strong>de</strong>l hombro, a <strong>un</strong>a distancia <strong>de</strong> 349 mm <strong>de</strong> la base física y<br />
se eliminó <strong>un</strong> grado <strong>de</strong> libertad (giro <strong>de</strong> la muñeca) ya que no <strong>con</strong>tribuye a la posición espacial <strong>de</strong>l<br />
MR. Por lo que ahora el mo<strong>de</strong>lo solo <strong>con</strong>tará <strong>con</strong> 4 grados <strong>de</strong> libertad.<br />
y 0<br />
z 0<br />
a 1<br />
x 0<br />
x 1<br />
x 2<br />
x 3<br />
a 3<br />
y 1<br />
a 2<br />
y 2<br />
y 3<br />
y 4<br />
θ 2<br />
θ 3<br />
θ 4<br />
a 4<br />
x 4<br />
Figura 1- Mo<strong>de</strong>lo cinemático <strong>de</strong> línea <strong>de</strong>l <strong>manipulador</strong> robótico.<br />
Las características físicas <strong>de</strong>l brazo son las siguientes<br />
Articulación<br />
( i )<br />
a α d θ<br />
1 a (16) π/2 0 θ 1 (310º)<br />
2 a (221) 0 0 θ 2 (170º)<br />
3 a (221) 0 0 θ 3 (300º)<br />
4 a (145) 0 0 θ 4 (180º)<br />
El mo<strong>de</strong>lo <strong>de</strong>l brazo es<br />
Tabla 1-Características <strong>de</strong>l <strong>manipulador</strong> robótico.<br />
Τ 0<br />
4<br />
[ ]<br />
[ ]<br />
⎡cc 1 234 − cs 1 234 s1 c1 ac 2 2+ ac 3 23+ ac 4 234 + ac 1 1⎤<br />
⎢<br />
⎥<br />
1 234 1 234 1 1 2 2 3 23 4 234 1 1<br />
0 1 2 3<br />
= = ⎢sc −ss − c s ac+ ac + ac + as<br />
A A A A<br />
⎥<br />
1 2 3 4<br />
⎢ s234 c234 0 a2s2+ a3s23+<br />
a4s234<br />
⎥<br />
⎢<br />
⎥<br />
⎣ 0 0 0 1<br />
⎦<br />
El siguiente arreglo nos da la orientación.<br />
(1)<br />
32