You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6 Parámetros de Usuario<br />
Tiempo de decel.<br />
C1-02<br />
1<br />
Par. Denominación Descripción<br />
C1-03 a<br />
C1-08<br />
Tiempos de acel./<br />
decel. de 2 a 4<br />
Par. Denominación Descripción<br />
Fija los tiempos de acel./decel. de 2 a 4 (como en<br />
C1-01/02).<br />
C2-01 Curva S 1 Curva S al inicio de la aceleración.<br />
C2-02 Curva S 2 Curva S al final de la aceleración.<br />
C2-03 Curva S 3 Curva S al inicio de la deceleración.<br />
C2-04 Curva S 4 Curva S al final de la deceleración.<br />
Compensación de deslizamiento<br />
C3-01<br />
C3-02<br />
C4-01<br />
C4-02<br />
C6-01<br />
C6-02<br />
d1-01 a<br />
d1-16<br />
d1-17<br />
E1-01<br />
E1-04<br />
E1-05<br />
E1-06<br />
E1-07<br />
E1-08<br />
E1-09<br />
E1-10<br />
E1-13<br />
Ganancia de la<br />
compensación del<br />
deslizamiento<br />
Retardo en la<br />
compensación de<br />
deslizamiento<br />
Ganancia de<br />
compensación de<br />
par<br />
Retardo en<br />
compensación de<br />
par<br />
Aumente el valor si la velocidad es menor que la<br />
frecuencia de referencia.<br />
Disminuya el valor si la velocidad es mayor que<br />
la frecuencia de referencia.<br />
Reduzca el valor si la compensación del<br />
deslizamiento es demasiado lenta.<br />
Aumente el valor si la velocidad es inestable.<br />
Compensación del par<br />
Aumente este valor si la respuesta de par es<br />
lenta.<br />
Reduzca este valor si se producen oscilaciones<br />
de velocidad/par.<br />
Aumente este valor si se producen oscilaciones<br />
de velocidad/par.<br />
Reduzca este valor si la respuesta de par es lenta.<br />
Modo de carga y frecuencia portadora<br />
Régimen Normal<br />
/ Heavy Duty<br />
Selección de<br />
frecuencia<br />
portadora<br />
Frecuencia de<br />
referencia 1 a 16<br />
Velocidad de<br />
operación de<br />
desplazamiento<br />
(Jog)<br />
Ajuste de la<br />
tensión de<br />
entrada<br />
Frec. de salida,<br />
máx.<br />
Tensión de salida<br />
máx.<br />
Frecuencia<br />
nominal<br />
Frec. de salida,<br />
mediana<br />
Tensión de salida<br />
med.<br />
Frec. de salida,<br />
mín.<br />
Tensión de salida,<br />
mín.<br />
Tensión nominal<br />
del motor<br />
0: Heavy Duty (HD) - Aplicaciones a par<br />
constante<br />
1: Normal Duty (ND) - Aplicaciones con par<br />
variable<br />
1: 2,0 kHz<br />
2: 5,0 kHz<br />
3: 8,0 kHz<br />
4: 10,0 kHz<br />
5: 12,5 kHz<br />
6: 15,0 kHz<br />
7 a A: Función Swing PWM-1 a 4<br />
F: Definida por usuario<br />
Frecuencias de referencia<br />
Ajuste de las velocidades de referencia de 1 a 16.<br />
Velocidad de operación de desplazamiento (Jog)<br />
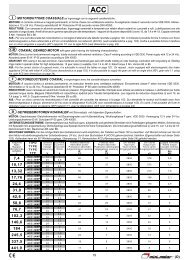
Característica V/f<br />
Tensión de entrada<br />
Para características V/f lineales ajuste los<br />
mismos valores para E1-07 y E1-09. En este<br />
caso no se tendrá en cuenta el ajuste de E1-08.<br />
Asegúrese de que el ajuste de las cuatro<br />
frecuencias cumpla con las siguientes<br />
condiciones ya que de lo contrario se producirá<br />
un fallo OPE10:<br />
E1-04 E1-06 E1-07 E1-09<br />
Tensión de salida<br />
(E1-05)<br />
(E1-13)<br />
(E1-08)<br />
(E1-10)<br />
(E1-09)<br />
Datos del motor<br />
(E1-07)<br />
(E1-06)<br />
(E1-04)<br />
Frecuencia de salida<br />
Configura el tiempo de deceleración 1 desde la<br />
frecuencia de salida máxima hasta 0 Hz.<br />
Par. Denominación Descripción<br />
E2-01<br />
E2-02<br />
E2-03<br />
Corriente<br />
nominal del<br />
motor<br />
Deslizamiento<br />
nominal del<br />
motor<br />
Corriente sin<br />
carga del motor<br />
E2-04 Polos del motor<br />
E2-05<br />
E2-06<br />
H1-01 a<br />
H1-06<br />
H2-01<br />
H2-02<br />
H2-03<br />
H3-01<br />
Resistencia de<br />
terminales del<br />
motor<br />
Inductancia de<br />
fuga del motor<br />
Selección de la<br />
función de<br />
entradas digitales<br />
S1 a S6<br />
Ajuste automático durante el autoajuste.<br />
Deslizamiento nominal del motor en hercios<br />
(Hz).<br />
Ajuste automático durante el autoajuste rotativo.<br />
Corriente de magnetización en amperios.<br />
Ajuste automático durante el autoajuste rotativo.<br />
Número de polos del motor.<br />
Ajuste automático en autoajuste.<br />
Ajuste de la resistencia del devanado del motor<br />
en ohmios. Ajuste automático en autoajuste.<br />
Define la caída de tensión debido a la<br />
inductancia de fuga del motor y es expresada en<br />
tanto por ciento de la tensión nominal del motor.<br />
Ajuste automático en el autoajuste.<br />
Ajuste de las entradas digitales<br />
Selección de la función de los terminales S1 a<br />
S6.<br />
Un listado de las principales funciones figura al final de la tabla.<br />
Ajuste de las salidas digitales<br />
Función de las<br />
salidas digitales<br />
MA/MB<br />
Función de salida<br />
digital P1<br />
Función de salida<br />
digital P2<br />
Fija la función de la salida del relé MA-MB-MC.<br />
Selección de la función en la salida del<br />
optoacoplador P1.<br />
Selección de la función en la salida del<br />
optoacoplador P2.<br />
Un listado de las principales funciones figura al final de la tabla.<br />
Ajuste de entrada analógica<br />
Selección de<br />
nivel de señal A1<br />
H3-02<br />
Selección de la<br />
función A1<br />
H3-03 Ganancia A1<br />
H3-04 Bias A1<br />
H3-09<br />
A2 Selección del<br />
nivel de señal<br />
H3-10<br />
Sel. de función<br />
A2<br />
H3-11 Ganancia A2<br />
H3-12 Bias A2<br />
H4-01<br />
Parámetros de<br />
monitorización<br />
AM<br />
H4-02 Ganancia AM<br />
0: 0 a + 10 V (entrada negativa ajustada a 0)<br />
1: 0 a +10 V (entrada bipolar)<br />
Asigna una función al terminal A1.<br />
Fija el valor de entrada en % en la entrada<br />
analógica de 10 V.<br />
Fija el valor de entrada en % en la entrada<br />
analógica de 0 V.<br />
0: 0 a + 10 V (entrada negativa ajustada a 0)<br />
1: 0 a +10 V (entrada bipolar)<br />
2: 4 a 20 mA (entrada de 9 bit)<br />
3: 0 a 20 mA<br />
Asigna una función al terminal A2.<br />
Fija el valor de entrada en % en la entrada<br />
analógica de 10 V/20 mA.<br />
Fija el valor de entrada en % en la entrada<br />
analógica de 0 V/0 mA/4 mA.<br />
Ajuste de entrada analógica<br />
Introduzca un valor igual al valor a monitorizar<br />
U1- . Ejemplo: Introduzca "103" para U1-<br />
03.<br />
Fija la tensión de salida del terminal AM igual al<br />
100% del valor de monitorización.<br />
Fija la tensión de salida del terminal AM igual al<br />
H4-02 Bias AM<br />
0% del valor de monitorización.<br />
Entrada de pulsos (indicación de frecuencia de referencia)<br />
H6-02<br />
H6-03<br />
Escalado de la<br />
entrada RP<br />
Ganancia de<br />
entrada para tren<br />
de pulsos<br />
Indica el nº de pulsos (en Hz) correspondientes<br />
al 100 % del valor de entrada.<br />
Fija el valor de entrada en % para la frecuencia<br />
de entrada según parámetro H6-02.<br />
SP 22<br />
<strong>YASKAWA</strong> Europe TOMP_C710606_75A <strong>V1000</strong> <strong>IP66</strong> - Guía de referencia rápida