Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...
Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...
Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Las cargas normales al eje <strong>de</strong> la viga actúan en el centro <strong>de</strong> corte, si no es necesario reemplazarla<br />
por una carga equivalente actuando en el centro <strong>de</strong> corte más un momento torsor<br />
distribuido.<br />
La pieza es prismática<br />
El eje <strong>de</strong> la viga es recto<br />
La sección es constante<br />
4.5.2. Definición <strong>de</strong>l sistema local <strong>de</strong> coor<strong>de</strong>nadas y el elemento maestro<br />
Debido a que toda la <strong>de</strong>scripción <strong>de</strong> la viga esta referida a su eje baricéntrico (t 1 ) y a sus dos<br />
ejes principales <strong>de</strong> inercia (t 2 y t 3 ), resulta conveniente <strong>de</strong>finir un sistema local <strong>de</strong> coor<strong>de</strong>nadas<br />
que coincida con dichos ejes. Esto permite trabajar con expresiones sencillas para las relaciones<br />
cinemáticas y constitutivas, y <strong>de</strong>sacoplar los diferentes comportamientos (flexión en dos planos<br />
ortogonales, torsión y fuerza axial)<br />
La coor<strong>de</strong>nada x 1 local coinci<strong>de</strong> entonces con el arco a lo largo <strong>de</strong>l eje <strong>de</strong> la viga, en tanto que<br />
las coor<strong>de</strong>nadas x 2 y x 3 se mi<strong>de</strong>n a partir <strong>de</strong>l baricentro <strong>de</strong> la sección en las direcciones principales<br />
<strong>de</strong> inercia. La coor<strong>de</strong>nada x 1 se encuentra en el intervalo [0, L], con L la longitud <strong>de</strong> la viga. Las<br />
coor<strong>de</strong>nadas x 2 y x 3 <strong>de</strong>pen<strong>de</strong>n <strong>de</strong> la forma <strong>de</strong> la sección. La elección <strong>de</strong> cual <strong>de</strong> los ejes principales<br />
<strong>de</strong> inercia asociar a x 2 es arbitraria.<br />
X 2<br />
1<br />
L<br />
2<br />
X 1<br />
X 3<br />
0<br />
-1 1<br />
ξ<br />
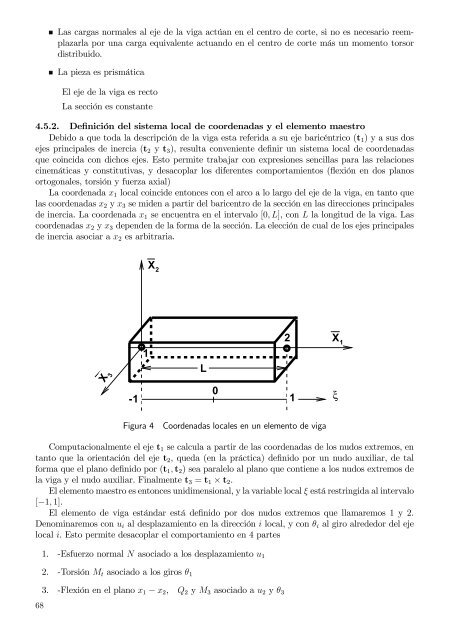
Figura 4<br />
Coor<strong>de</strong>nadas locales en un elemento <strong>de</strong> viga<br />
Computacionalmente el eje t 1 se calcula a partir <strong>de</strong> las coor<strong>de</strong>nadas <strong>de</strong> los nudos extremos, en<br />
tanto que la orientación <strong>de</strong>l eje t 2 , queda (en la práctica) <strong>de</strong>finido por un nudo auxiliar, <strong>de</strong> tal<br />
forma que el plano <strong>de</strong>finido por (t 1 , t 2 ) sea paralelo al plano que contiene a los nudos extremos <strong>de</strong><br />
la viga y el nudo auxiliar. Finalmente t 3 = t 1 × t 2 .<br />
El elemento maestro es entonces unidimensional, y la variable local ξ está restringida al intervalo<br />
[−1, 1].<br />
El elemento <strong>de</strong> viga estándar está <strong>de</strong>finido por dos nudos extremos que llamaremos 1 y 2.<br />
Denominaremos con u i al <strong>de</strong>splazamiento en la dirección i local, y con θ i al giro alre<strong>de</strong>dor <strong>de</strong>l eje<br />
local i. Esto permite <strong>de</strong>sacoplar el comportamiento en 4 partes<br />
68<br />
1. -Esfuerzo normal N asociado a los <strong>de</strong>splazamiento u 1<br />
2. -Torsión M t asociado a los giros θ 1<br />
3. -Flexión en el plano x 1 − x 2 , Q 2 y M 3 asociado a u 2 y θ 3