Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...
Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...
Capítulo 1 Métodos de residuos ponderados Funciones de prueba ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
¯K<br />
= ∫ L<br />
0 BT D B d¯x 1 =<br />
¯K =<br />
∫ +1<br />
−1<br />
EA<br />
L<br />
B T D B L 2 dξ<br />
⎡<br />
1 0 −1 0<br />
⎢ 0 0 0 0<br />
⎣ −1 0 1 0<br />
0 0 0 0<br />
Recor<strong>de</strong>mos entonces que esta matriz representa el trabajo virtual interno a través <strong>de</strong> la expresión<br />
T.V.I. = (δū e ) T<br />
Para reescribir esta expresión en términos <strong>de</strong> <strong>de</strong>splazamientos respecto al sistema global <strong>de</strong> coor<strong>de</strong>nadas<br />
<strong>de</strong>bemos expresar los ū e y δū e en función <strong>de</strong> u e y δu e referidos al sistema global<br />
¯K ū e<br />
⎤<br />
⎥<br />
⎦<br />
X 2<br />
U 1<br />
X 2<br />
U 1<br />
U 2<br />
X 1<br />
U 2<br />
α<br />
X 1<br />
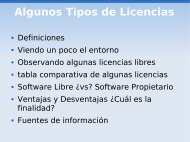
Figura 3<br />
barra <strong>de</strong> reticulado en coor<strong>de</strong>nadas globales<br />
similarmente<br />
ū e =<br />
⎡<br />
⎢<br />
⎣<br />
ū 1 1<br />
ū 1 2<br />
ū 2 1<br />
ū 2 2<br />
La matriz Λ tiene la forma<br />
⎤ ⎡<br />
⎥<br />
⎦ = ⎢<br />
⎣<br />
cos α sin α 0 0<br />
− sin α cos α 0 0<br />
0 0 cos α sin α<br />
0 0 − sin α cos α<br />
δū e = Λ δu e<br />
Λ =<br />
[ R 0<br />
0 R<br />
]<br />
⎤ ⎡<br />
⎥ ⎢<br />
⎦ ⎣<br />
u 1 1<br />
u 1 2<br />
u 2 1<br />
u 2 2<br />
⎤<br />
⎥<br />
⎦ = Λ ue<br />
don<strong>de</strong> R es en este caso particular la matriz <strong>de</strong> rotación <strong>de</strong>l sistema global al local y se cumple<br />
que Λ −1 = Λ T (en un caso general las matrices <strong>de</strong> transformación no son sencillamente matrices<br />
<strong>de</strong> cambio <strong>de</strong> coor<strong>de</strong>nadas entre dos sistemas ortogonales). Luego el T.V.I. pue<strong>de</strong> escribirse<br />
T.V.I. = (δu e ) T Λ} T {{<br />
¯K Λ}<br />
u e = (δu e ) T<br />
K<br />
K u e<br />
notar entonces que para transformar la matriz <strong>de</strong> rigi<strong>de</strong>z la expresión correcta es con Λ T y no con<br />
Λ −1 , por ser la matriz <strong>de</strong> rigi<strong>de</strong>z un tensor y no una aplicación lineal<br />
Similarmente para el trabajo virtual externo notar que:<br />
66<br />
T.V.E. = (δū e ) T<br />
¯f = (δu e ) T Λ} {{ T ¯f } = (δu e ) T f<br />
f