

Geodesia. Cartografía. Sistemas de referencia. Tiempos.
Geodesia. Cartografía. Sistemas de referencia. Tiempos.
Geodesia. Cartografía. Sistemas de referencia. Tiempos.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
DME II<br />
Navegación por posicionamiento<br />
GNSS: Navegación por satélite<br />
GPS: Otros conceptos<br />
Fundamentos básicos<br />
Navegación DME-DME y el diseño <strong>de</strong> aerovías<br />
La secuencia <strong>de</strong> pares <strong>de</strong> pulsos <strong>de</strong>pen<strong>de</strong> <strong>de</strong>l equipo <strong>de</strong>l avión,<br />
por lo que un mismo equipo <strong>de</strong> tierra pue<strong>de</strong> respon<strong>de</strong>r a<br />
múltiples equipos en el aire (hasta 100–200 aeronaves).<br />
La precisión típica <strong>de</strong> un DME está entre 185 m (0.1 nm) y<br />
926 m. (0.5nm) 2 − σ. Se pue<strong>de</strong>n obtener medidas casi<br />
continuamente (10 medidas por segundo). También se obtiene<br />
una estimación <strong>de</strong> la velocidad (proyectada en la dirección <strong>de</strong><br />
la estación) mediante el efecto Doppler.<br />
Obsérvese que la medida <strong>de</strong> distancia D es 3-D. Para obtener<br />
la distancia sobre el terreno, dG , si la altitud Alt es conocida:<br />
D 2 = d 2 G + Alt2 .<br />
Navegación por posicionamiento<br />
GNSS: Navegación por satélite<br />
GPS: Otros conceptos<br />
Navegación DME/DME<br />
Fundamentos básicos<br />
Navegación DME-DME y el diseño <strong>de</strong> aerovías<br />
Consi<strong>de</strong>remos el caso <strong>de</strong> dos DMEs. En principio existirá una<br />
ambigüedad que se pue<strong>de</strong> resolver conocidas medidas<br />
anteriores o con una tercera estación.<br />
Simplifiquemos y supongamos Tierra plana y las coor<strong>de</strong>nadas<br />
x, y que mi<strong>de</strong>n la posición <strong>de</strong> la aeronave; las coor<strong>de</strong>nadas<br />
x1, y1 y x2, y2 <strong>de</strong>terminan la posición <strong>de</strong> las estaciones.<br />
Se mi<strong>de</strong> la distancia a la primera estación ρ1 y a la segunda<br />
estación ρ2 (distancias sobre tierra).<br />
Las ecuaciones que hay que resolver para hallar la posición<br />
son:<br />
(x − x1) 2 + (y − y1) 2 = ρ1, (x − x2) 2 + (y − y2) 2 = ρ2.<br />
Éstas ecuaciones son sencillas <strong>de</strong> resolver. Pero si las<br />
distancias contienen error, ¿cómo <strong>de</strong>terminar el error final en<br />
la estimación <strong>de</strong> posición?<br />
5 / 48<br />
6 / 48<br />
User location<br />
In the presence of measurement errors, the range rings used to compute the<br />
user’s location will be in error and result in error in the computed position. The con-<br />
Navegación por posicionamiento<br />
cept of dilution of precision is theGNSS: i<strong>de</strong>aNavegación that the position por satéliteerror<br />
that results from mea-<br />
GPS: Otros conceptos<br />
surement errors <strong>de</strong>pends on the user/foghorn relative geometry. Graphically, these<br />
i<strong>de</strong>as are illustrated in Figure 7.5. Two geometries are indicated. In Figure 7.5(a),<br />
Errores en navegación Foghorn 2DME/DME<br />
Variation in range ring<br />
due to range errors:<br />
from foghorn 1<br />
from foghorn 2<br />
Foghorn 2<br />
Variation in range ring due to<br />
range errors:<br />
from foghorn 1<br />
from foghorn 2<br />
RNAV<br />
Variation in range ring due to<br />
range errors:<br />
from foghorn 1<br />
from foghorn 2<br />
User location<br />
Foghorn 2<br />
Foghorn 1<br />
Fundamentos básicos<br />
Navegación DME-DME y el diseño <strong>de</strong> aerovías<br />
Sha<strong>de</strong>d region: Locations<br />
using data from Sha<strong>de</strong>d within region: Locations using data<br />
indicated error frombounds within indicated error bounds<br />
User location<br />
Figure 7.5 Relative geometry and dilution of precision: (a) geometry with low DOP, and (b)<br />
geometry with high DOP.<br />
(a)<br />
User location<br />
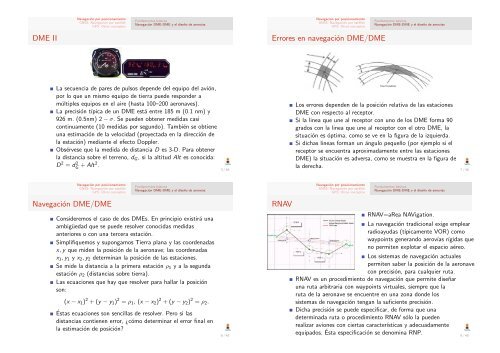
Los errores <strong>de</strong>pen<strong>de</strong>n <strong>de</strong> la posición relativa <strong>de</strong> las estaciones<br />
Foghorn 1<br />
DME con respecto al receptor.<br />
Si la linea que une al receptor con uno <strong>de</strong> los DME forma 90<br />
Foghorn 2<br />
grados con la linea que une al receptor con el otro DME, la<br />
Foghorn 1<br />
situación es óptima, como se (b) ve en la figura <strong>de</strong> la izquierda.<br />
Figure 7.5 Relative (a) geometry and dilution of precision: (a) geometry with low DOP, and (b)<br />
Si dichas geometry lineas with high forman DOP. un ángulo pequeño (por ejemplo si el<br />
receptor se encuentra aproximadamente entre las estaciones<br />
DME) la situación Sha<strong>de</strong>d region: es adversa, Locations using como data se muestra en la figura <strong>de</strong><br />
from within indicated error bounds<br />
la <strong>de</strong>recha.<br />
Navegación por posicionamiento<br />
GNSS: Navegación por satélite<br />
GPS: Otros conceptos<br />
Fundamentos básicos<br />
Navegación DME-DME y el diseño <strong>de</strong> aerovías<br />
RNAV=aRea NAVigation.<br />
7 / 48<br />
La navegación tradicional exige emplear<br />
radioayudas (típicamente VOR) como<br />
waypoints generando aerovías rígidas que<br />
no permiten explotar el espacio aéreo.<br />
Foghorn Los 1 sistemas <strong>de</strong> navegación actuales<br />
(b) permiten saber la posición <strong>de</strong> la aeronave<br />
con precisión, para cualquier ruta.<br />
RNAV es un procedimiento <strong>de</strong> navegación que permite diseñar<br />
una ruta arbitraria con waypoints virtuales, siempre que la<br />
ruta <strong>de</strong> la aeronave se encuentre en una zona don<strong>de</strong> los<br />
sistemas <strong>de</strong> navegación tengan la suficiente precisión.<br />
Dicha precisión se pue<strong>de</strong> especificar, <strong>de</strong> forma que una<br />
<strong>de</strong>terminada ruta o procedimiento RNAV sólo la pue<strong>de</strong>n<br />
realizar aviones con ciertas características y a<strong>de</strong>cuadamente<br />
equipados. Ésta especificación se <strong>de</strong>nomina RNP. 8 / 48













