

Geodesia. Cartografía. Sistemas de referencia. Tiempos.
Geodesia. Cartografía. Sistemas de referencia. Tiempos.
Geodesia. Cartografía. Sistemas de referencia. Tiempos.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Ecuaciones Diferenciales Cinemáticas <strong>de</strong> la Actitud<br />
Ecuaciones Fundamentales <strong>de</strong> la Navegación<br />
Navegación Aérea<br />
Tema 3: Ecuaciones <strong>de</strong> la navegación.<br />
Ecuaciones Diferenciales Cinemáticas <strong>de</strong> la Actitud<br />
Ecuaciones Fundamentales <strong>de</strong> la Navegación<br />
DCM<br />
Ángulos <strong>de</strong> Euler<br />
Cuaterniones<br />
Ecuaciones Diferenciales Cinemáticas <strong>de</strong> la Actitud<br />
Para el caso <strong>de</strong> la posición, las ecuaciones cinemáticas<br />
relacionan el vector posición con el vector velocidad, mientras<br />
que las ecuaciones dinámicas relacionan el vector velocidad<br />
con el vector fuerza.<br />
Para el caso <strong>de</strong> la actitud, las ecuaciones diferenciales<br />
cinemáticas (EDC) relacionan la representación <strong>de</strong> la actitud<br />
(DCM, ángulos <strong>de</strong> Euler, cuaterniones) con la velocidad<br />
angular ω. Típicamente estas ecuaciones son no-lineales.<br />
En el sistema <strong>de</strong> navegación inercial, los giróscopos nos darán<br />
ω, y habrá que utilizar las EDC, es <strong>de</strong>cir, integrar las<br />
ecuaciones, para calcular la actitud.<br />
Por tanto es importante conocer las diferentes EDC para las<br />
diferentes representaciones, para ver cuál es la más ventajosa<br />
<strong>de</strong>s<strong>de</strong> un punto <strong>de</strong> vista computacional.<br />
2 / 28<br />
Ecuaciones Diferenciales Cinemáticas <strong>de</strong> la Actitud<br />
Ecuaciones Fundamentales <strong>de</strong> la Navegación<br />
DCM para ángulos pequeños I<br />
DCM<br />
Ángulos <strong>de</strong> Euler<br />
Cuaterniones<br />
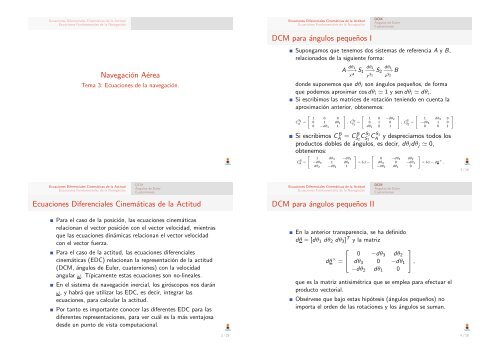
Supongamos que tenemos dos sistemas <strong>de</strong> <strong>referencia</strong> A y B,<br />
relacionados <strong>de</strong> la siguiente forma:<br />
xA S1<br />
dθ2 dθ3<br />
−→ S2 −→<br />
y S1 zS2 A dθ1<br />
−→<br />
don<strong>de</strong> suponemos que dθi son ángulos pequeños, <strong>de</strong> forma<br />
que po<strong>de</strong>mos aproximar cos dθi 1 y sen dθi dθi.<br />
Si escribimos las matrices <strong>de</strong> rotación teniendo en cuenta la<br />
aproximación anterior, obtenemos:<br />
2<br />
C S1 = 4<br />
A<br />
1 0 0<br />
0 1 dθ1<br />
0 −dθ1 1<br />
3<br />
2<br />
5 , C S2 = 4<br />
S1 1 0 −dθ2<br />
0 1 0<br />
dθ2 0 1<br />
B<br />
3<br />
2<br />
5 , C B<br />
S = 4<br />
2<br />
1 dθ3 0<br />
−dθ3 1 0<br />
0 0 1<br />
Si escribimos C B A = C B S2 S1 C C S2 S1 A y <strong>de</strong>spreciamos todos los<br />
productos dobles <strong>de</strong> ángulos, es <strong>de</strong>cir, dθidθj 0,<br />
obtenemos:<br />
2<br />
C B<br />
A = 4<br />
1 dθ3 −dθ2<br />
−dθ3 1 dθ1<br />
dθ2 −dθ1 1<br />
3<br />
2<br />
5 = Id − 4<br />
Ecuaciones Diferenciales Cinemáticas <strong>de</strong> la Actitud<br />
Ecuaciones Fundamentales <strong>de</strong> la Navegación<br />
DCM para ángulos pequeños II<br />
0 −dθ3 dθ2<br />
dθ3 0 −dθ1<br />
−dθ2 dθ1 0<br />
DCM<br />
Ángulos <strong>de</strong> Euler<br />
Cuaterniones<br />
En la anterior transparencia, se ha <strong>de</strong>finido<br />
dθ = [dθ1 dθ2 dθ3] T y la matriz<br />
⎡<br />
dθ × = ⎣<br />
0 −dθ3 dθ2<br />
dθ3 0 −dθ1<br />
−dθ2 dθ1 0<br />
3<br />
5 = Id − dθ × ,<br />
que es la matriz antisimétrica que se emplea para efectuar el<br />
producto vectorial.<br />
Obsérvese que bajo estas hipótesis (ángulos pequeños) no<br />
importa el or<strong>de</strong>n <strong>de</strong> las rotaciones y los ángulos se suman.<br />
⎤<br />
⎦ ,<br />
3<br />
5 .<br />
3 / 28<br />
4 / 28













