Sensores de Nivel: Ultrasónico - PAD
Sensores de Nivel: Ultrasónico - PAD Sensores de Nivel: Ultrasónico - PAD
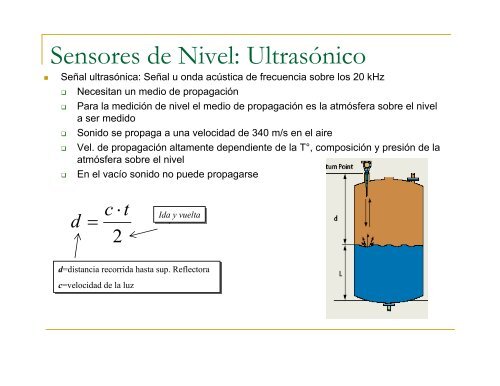
Sensores de Nivel: Ultrasónico Señal ultrasónica: Señal u onda acústica de frecuencia sobre los 20 kHz Necesitan un medio de propagación Para la medición de nivel el medio de propagación es la atmósfera sobre el nivel a ser medido Sonido se propaga a una velocidad de 340 m/s en el aire Vel. de propagación altamente dependiente de la T°, composición y presión de la atmósfera sobre el nivel En el vacío sonido no puede propagarse d = c ⋅ t 2 d=distancia recorrida hasta sup. Reflectora c=velocidad de la luz Ida y vuelta
- Page 2 and 3: Sensores de Nivel: Radar Generalme
- Page 4 and 5: Sensores de Nivel: Radar Ejemplo se
- Page 6 and 7: Sensores de Nivel: Radar Métodos
- Page 8 and 9: Sensores de Nivel: Radar Carácter
- Page 10 and 11: Sensores Radar: Contacto Método i
- Page 12 and 13: Sensores de Radar: Ejemplo Aplicaci
- Page 14 and 15: Sensores Capacitivos o RF Mide la
- Page 16 and 17: Sensores Capacitivos o RF Parámet
- Page 18 and 19: Sensores Electromecánico •Peso s
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: <strong>Ultrasónico</strong><br />
Señal ultrasónica: Señal u onda acústica <strong>de</strong> frecuencia sobre los 20 kHz<br />
Necesitan un medio <strong>de</strong> propagación<br />
Para la medición <strong>de</strong> nivel el medio <strong>de</strong> propagación es la atmósfera sobre el nivel<br />
a ser medido<br />
Sonido se propaga a una velocidad <strong>de</strong> 340 m/s en el aire<br />
Vel. <strong>de</strong> propagación altamente <strong>de</strong>pendiente <strong>de</strong> la T°, composición y presión <strong>de</strong> la<br />
atmósfera sobre el nivel<br />
En el vacío sonido no pue<strong>de</strong> propagarse<br />
d<br />
=<br />
c ⋅ t<br />
2<br />
d=distancia recorrida hasta sup. Reflectora<br />
c=velocidad <strong>de</strong> la luz<br />
Ida y vuelta
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Generalmente funcionan en el rango <strong>de</strong> 20KHz a 45<br />
kHz<br />
Buen <strong>de</strong>sempeño en superficies sin agitación<br />
Sensibles a<br />
vapores (sonido es absorbido)<br />
polvo en suspensión<br />
Presión y T°<br />
Mo<strong>de</strong>los compensados en T°, con filtros y<br />
procesamiento electrónico por microprocesador<br />
Más económicos que los <strong>de</strong> tipo <strong>de</strong> radar
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Teoría<br />
Una señal <strong>de</strong> microonda es transmitida via una<br />
antena<br />
La señal se refleja sobre la superficie <strong>de</strong>l fluido<br />
producto<br />
Eco es recibido <strong>de</strong>spués <strong>de</strong> un intervalo <strong>de</strong><br />
tiempo t<br />
La distancia <strong>de</strong> la capa reflectora (in<strong>de</strong>pendiente<br />
<strong>de</strong>l método <strong>de</strong> radar usado) se mi<strong>de</strong> a través <strong>de</strong>l<br />
tiempo t<br />
P.ejm.: 6.7 ns app. Para recorrer ida y vuelta 1 m.
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Ejemplo señales reflejadas en función <strong>de</strong> la distancia
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Tipos<br />
Sin guía <strong>de</strong> onda: Transmitida libremente al espacio abierto<br />
Depen<strong>de</strong>ncia <strong>de</strong> constante dieléctrica <strong>de</strong>l medio<br />
Diferentes tipos <strong>de</strong> antena<br />
Cuerno o bocina<br />
Varilla<br />
Plana<br />
Parabólica<br />
Con guía <strong>de</strong> onda: Señal es transmitida a través <strong>de</strong> una tubo que actúa como guía <strong>de</strong> onda<br />
In<strong>de</strong>pendiente <strong>de</strong> constante dieléctrica
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Métodos <strong>de</strong> operación <strong>de</strong> radar para la medición <strong>de</strong> nivel<br />
Interferómetro:<br />
Mi<strong>de</strong> la distancia en relación a la diferencia <strong>de</strong> fase entre la señal transmitida y recibida<br />
Señal <strong>de</strong> alta frecuencia, constante.<br />
Pulso (time of flight method) => Método más utilizado en sensores <strong>de</strong> radar <strong>de</strong> contacto<br />
Transmite la señal <strong>de</strong> radar en pulsos <strong>de</strong> corta duración<br />
La distancia la mi<strong>de</strong> <strong>de</strong> los tiempos <strong>de</strong> tránsito <strong>de</strong> los pulsos, a través <strong>de</strong> las señales reflejadas al receptor
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Métodos <strong>de</strong> operación <strong>de</strong> radar para la medición <strong>de</strong> nivel<br />
Método más utilizado en sensores <strong>de</strong> radar <strong>de</strong> espacio abierto<br />
Onda continua <strong>de</strong> frecuencia modulada (CWFM: continuous wave frequency modulated)<br />
Se envía continuamente una señal <strong>de</strong> frecuencia modulada<br />
Generalmente en rampas lineales sucesivas<br />
La distancia <strong>de</strong>l objetivo se pue<strong>de</strong> calcular <strong>de</strong> la señal recibida
<strong>Sensores</strong> <strong>de</strong> <strong>Nivel</strong>: Radar<br />
Carácterísticas<br />
Ángulo <strong>de</strong> apertura <strong>de</strong> la onda<br />
Se <strong>de</strong>fine como el ángulo <strong>de</strong>l cono en cuyo límite la <strong>de</strong>nsidad <strong>de</strong> potencia <strong>de</strong> la señal cae en la mitad<br />
Señal se expan<strong>de</strong> con un ángulo que es función <strong>de</strong> la frecuencia => choque con cuerpos en el zona <strong>de</strong>l<br />
ángulo<br />
A mayor frecuencia menor ángulo<br />
Zona ciega<br />
Región inmediatamente inferior a la antena<br />
No se pue<strong>de</strong> medir distancia<br />
Zona ciega<br />
Angulo
<strong>Sensores</strong> Radar: No Contacto<br />
Método no invasivo<br />
Normalmente no influida por la atmósfera en que se transmite<br />
Señal es transmitida por la antena al espacio abierto<br />
Pue<strong>de</strong>n requerir un sintonía fina y ajustes en terreno<br />
La elección <strong>de</strong>l tipo <strong>de</strong> antena <strong>de</strong>be ser cuidadosa respecto a la aplicación (a<br />
mayor área <strong>de</strong> la antena, menor es el ángulo <strong>de</strong> propagación)<br />
Cono: más utilizada, buen compromiso entre tamaño, y capacidad <strong>de</strong> transmisión,<br />
recepción<br />
Varilla: Pue<strong>de</strong> funcionar en aplicaciones simples, don<strong>de</strong> existen restricciones <strong>de</strong> espacio<br />
<strong>de</strong> instalación. Tienen el mayor ángulo <strong>de</strong> transmisión, lo cual limita su aplicabilidad.<br />
Parabólicas y planas: Utilizada en aplicaciones <strong>de</strong> alta exactitud (fiscalización <strong>de</strong><br />
inventarios). Son más gran<strong>de</strong>s. Comparativamente ofrecen el menor ángulo <strong>de</strong> dispersión,<br />
disminuye problemas <strong>de</strong> rebotes adyacentes.<br />
Problemas<br />
Pue<strong>de</strong> ser afectada por rebotes no <strong>de</strong>seados en estructuras adyacentes<br />
Pue<strong>de</strong> ser afectado en medición <strong>de</strong> sólidos <strong>de</strong> partículas gran<strong>de</strong>s por múltiples rebotes<br />
Cuidado con algunos tipos <strong>de</strong> vapores y espumas<br />
Problemas en fluidos <strong>de</strong> baja constante dieléctrica: ε < 1.4<br />
Fluido <strong>de</strong> baja ε se comporta transparente a la microonda<br />
En la actualidad mo<strong>de</strong>los sofisticados tanto en hardware como en software, que<br />
permiten discriminar y reconocer rebotes múltiples <strong>de</strong>bido a estructuras,<br />
obstáculos, etc.
<strong>Sensores</strong> Radar: Contacto<br />
Método invasivo<br />
Se utiliza una guía física (a través <strong>de</strong> todo el largo <strong>de</strong><br />
medición) a través <strong>de</strong> la cual la onda<br />
electromagnética <strong>de</strong> alta frecuencia se propaga .<br />
Generalmente se utiliza cable coaxial, alambre o un<br />
tubo<br />
Minimiza los efectos <strong>de</strong> rebotes no <strong>de</strong>seados<br />
Minimiza efectos <strong>de</strong> vapores y polvos<br />
Pue<strong>de</strong>n medir interfaces (cuidado con constante<br />
dieléctrica)<br />
Pue<strong>de</strong>n ser afectados por fluidos con muy baja<br />
constante dieléctrica<br />
En estos casos se pue<strong>de</strong> utilizar sistemas <strong>de</strong> doble<br />
varilla
<strong>Sensores</strong> <strong>de</strong> Radar: Ejemplo Aplicación<br />
Tratamiento y bombeo <strong>de</strong> agua (Radar espacio abierto)
<strong>Sensores</strong> <strong>de</strong> Radar: Ejemplo Aplicación<br />
Tratamiento y bombeo <strong>de</strong> agua (cont.)<br />
Otros rebotes<br />
Señal <strong>de</strong> la superficie <strong>de</strong>l agua
<strong>Sensores</strong> <strong>de</strong> Radar: Ejemplo Aplicación<br />
Torre <strong>de</strong>stilación (Radar <strong>de</strong> con guía <strong>de</strong> onda)
<strong>Sensores</strong> Capacitivos o RF<br />
Mi<strong>de</strong> la capacidad efectiva e entre un electrodo inmerso en el fluido, y una segunda<br />
placa conductora<br />
La segunda placa conductora pue<strong>de</strong> ser la pared <strong>de</strong>l estanque, u otro electrodo<br />
La capacidad equivalente entre los electrodos es función <strong>de</strong> la cantidad <strong>de</strong> dieléctrico<br />
entre ambos => <strong>de</strong>pen<strong>de</strong> <strong>de</strong>l nivel<br />
Se inyecta una señal <strong>de</strong> alta frecuencia, en el circuito capacitivo.<br />
En función <strong>de</strong> la corriente y voltaje generado se mi<strong>de</strong> la admitancia que es función <strong>de</strong> la<br />
capacitancia
<strong>Sensores</strong> Capacitivos o RF<br />
Relación nivelcapacidad:<br />
En el caso <strong>de</strong> un liquido<br />
conductivo ecuación se<br />
simplifica a:
<strong>Sensores</strong> Capacitivos o RF<br />
Parámetro más importante: Constante dieléctrica <strong>de</strong>l fluido<br />
A mayor diferencia entre la cte dieléctrica <strong>de</strong>l fluido y <strong>de</strong>l atmósfera sobre él, es mejor la<br />
sensibilidad<br />
Constante dieléctrica <strong>de</strong> un material pue<strong>de</strong> variar con<br />
T°, humedad, tamaño <strong>de</strong> partículas<br />
Un tamaño gran<strong>de</strong> <strong>de</strong> partículas <strong>de</strong>ja mucho espacio abierto entre partículas<br />
disminuyendo la capacidad.<br />
Para disminuir efecto <strong>de</strong> variaciones <strong>de</strong> constante dieléctrica se pue<strong>de</strong> mejorarla<br />
longitud <strong>de</strong> electrodo <strong>de</strong> prueba<br />
Cuidado con la compatibilidad <strong>de</strong>l o los electrodos <strong>de</strong>l sensor con el fluido<br />
Alguno mo<strong>de</strong>los incluyen compensación <strong>de</strong> T°
<strong>Sensores</strong> Capacitivos o RF
<strong>Sensores</strong> Electromecánico<br />
•Peso se <strong>de</strong>sliza, hasta entrar en<br />
contacto con la superficie<br />
•En ese momento se recoge<br />
•Buena exactitud<br />
•Fundamentalmente en sólidos<br />
gran<strong>de</strong>s
Estudien<br />
Una buena tarea (sin<br />
copia!!)<br />
Suerte!!!<br />
That’s all folks


