6. Diagramas de corte y momento - PAD
6. Diagramas de corte y momento - PAD
6. Diagramas de corte y momento - PAD

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>6.</strong>1 Definiciones<br />
48<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
<strong>6.</strong> <strong>Diagramas</strong> <strong>de</strong> <strong>corte</strong> y <strong>momento</strong><br />
En muchas estructuras, como puentes, chasises, ejes, etc. hay componentes que realizan primero la<br />
función <strong>de</strong> transmitir las fuerzas transversales (cortante) y los <strong>momento</strong>s transversales (flexión).<br />
Tales miembros, si son <strong>de</strong> sección transversal relativamente angosta, reciben comúnmente el<br />
nombre <strong>de</strong> “Vigas”. Esta característica las diferencia <strong>de</strong> las barras que solo soportan<br />
tracción/compresión.<br />
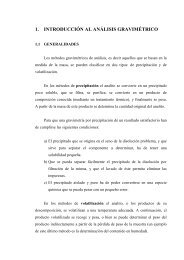
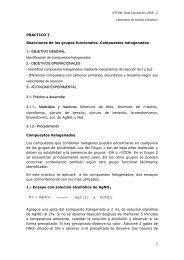
Para analizar el comportamiento <strong>de</strong> vigas, es recomendable partir por analizar la flexión pura, en la<br />
figura <strong>6.</strong>1 se muestran múltiples ejemplos, siendo las (d) y (e) diagramas <strong>corte</strong> y <strong>momento</strong>, que<br />
serán <strong>de</strong>sarrollados hacia el final <strong>de</strong>l capítulo.<br />
Bajo el prisma <strong>de</strong> la transmisión <strong>de</strong> fuerzas, los diagramas <strong>de</strong> <strong>corte</strong> y <strong>momento</strong> representan los<br />
esquemas <strong>de</strong> fuerza resultante transversal y <strong>de</strong>l <strong>momento</strong> flexionante transmqitidos en cualquier<br />
sección transversal a lo largo <strong>de</strong> esa viga.<br />
Tal como se vió en la asignatura <strong>de</strong> “Mecánica general”, se tiene que en el espacio, existen 6 grados<br />
<strong>de</strong> libertad, 3 para traslación y 3 para rotacion. Ahora bien, para el caso <strong>de</strong> una viga y, aprovechando<br />
el principio <strong>de</strong> Saint-Venant, se pue<strong>de</strong> representar el sistema <strong>de</strong> fuerzas actuantes como una<br />
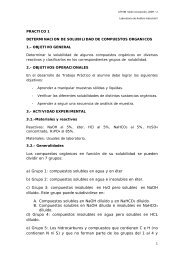
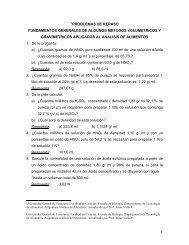
resultante, consistente en 2 fuerzas y un <strong>momento</strong>. En la figura <strong>6.</strong>2 (c) la condición <strong>de</strong> carga en la<br />
sección z, está representada por 3 fuerzas resultantes: una carga axial “A” que ten<strong>de</strong>rá a<br />
comprimir/traccionar la viga, una fuerza transversal “V” que ten<strong>de</strong>rá a cortar la viga y un <strong>momento</strong><br />
resultante “M” que ten<strong>de</strong>rá a flectar la viga. Para sistemas más complejos, se consi<strong>de</strong>rará un<br />
diagrama <strong>de</strong> <strong>corte</strong> y <strong>momento</strong> en distintos planos, lo que permite analizar en el plano y fenómeno<br />
que se produce en el espacio.
Fig. <strong>6.</strong>1 Ejemplos <strong>de</strong> flexión pura.<br />
Fig. <strong>6.</strong>2 Viga con cargas centradas<br />
49<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz
50<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
En la fig. <strong>6.</strong>2 (d) se muestran las fuerzas y <strong>momento</strong>s <strong>de</strong> reacción. Consi<strong>de</strong>rando la 3º ley <strong>de</strong><br />
Newton, estas <strong>de</strong>ben ser iguales y opuestas a las resultantes que se muestran en el diagrama <strong>6.</strong>2<br />
(c). Cuando una estructura, componente o elemento se encuentra en equilibrio estático, cualquier<br />
componente aislado <strong>de</strong> ésta (en nuestro caso inmediato, un “<strong>corte</strong>” <strong>de</strong> la viga) este también <strong>de</strong>berá<br />
permanecer en equilibrio bajo el influjo <strong>de</strong> todas las fuerzas y <strong>momento</strong>s externos que actúan sobre<br />
ella. La fig. <strong>6.</strong>2 (d) muestra el “DCL” (Diagrama <strong>de</strong> Cuerpo Libre) para el cual, <strong>de</strong>ben <strong>de</strong> satisfacerse<br />
las leyes <strong>de</strong>l equilibrio estático. Para la vista en 2D <strong>de</strong> la figura <strong>6.</strong>2, se requieren solo 3 ecuaciones<br />
<strong>de</strong> equilibrio, a saber:<br />
∑ 0 ∑ 0 ∑ 0<br />
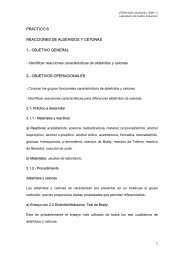
La figura <strong>6.</strong>3 muestra una viga bajo la solicitación <strong>de</strong> varias clases <strong>de</strong> cargas. Los apoyos son fijo y<br />
simple todas las fuerzas involucradas se encuentran en el diagrama <strong>de</strong> cuerpo libre <strong>de</strong> cuerpo libre<br />
<strong>de</strong> la figura <strong>6.</strong>3 (b). por su parte<br />
Fig. <strong>6.</strong>3 Viga con múltiples solicitaciones y su correspondiente DCL<br />
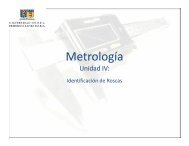
Para el cálculo <strong>de</strong>l <strong>corte</strong> y <strong>de</strong>l <strong>momento</strong> flector, EN CUALQUIER PUNTO, por medio <strong>de</strong> la<br />
generación <strong>de</strong> sus respectivos diagramas, se requiere adoptar convenciones para los signos y los<br />
sentidos en que supondremos las cargas internas a lo largo <strong>de</strong> la viga. Estas convenciones que se<br />
usan comúnmente se muestran en la figura <strong>6.</strong>4.<br />
Fig. <strong>6.</strong>4 Estados positivos para <strong>corte</strong> y flexión, según convención<br />
<strong>6.</strong>2 Relaciones entre carga, cortante y <strong>momento</strong> flexionante<br />
Según la fig. <strong>6.</strong>6, en la cual se muestra una porción angosta <strong>de</strong> viga con una carga distribuida. La<br />
carga total en la sección “s” se encuentra <strong>de</strong>terminada por el valor <strong>de</strong> la fuerza lineal “q” que es<br />
función <strong>de</strong> la distancia s, medida <strong>de</strong>s<strong>de</strong> el origen <strong>de</strong> nuestro sistema <strong>de</strong> referencia, hasta un<br />
incremento <strong>de</strong> distancia Δs, a su <strong>de</strong>recha, la carga entonces, será q+Δq. A través <strong>de</strong> la distancia Δs,<br />
la carga se muestra variando linealmente. El incremento <strong>de</strong> la fuerza cortante será:
51<br />
∆ ∆ 1<br />
2 ∆∆<br />
Don<strong>de</strong> la proporción <strong>de</strong>l cambio <strong>de</strong> la fuerza cortante será:<br />
∆<br />
∆ 1<br />
2 ∆<br />
Resistencia <strong>de</strong> los Materiales<br />
Haciendo el límite cuando Δs y Δq tien<strong>de</strong>n a cero obtenemos que.<br />
(<strong>6.</strong>1) <br />
<br />
Fig. <strong>6.</strong>5 Convenciones estructurales para<br />
fuerza cortante y <strong>momento</strong> flector positivos en<br />
una viga curva cualquiera<br />
Técnico Universitario en Mecánica Automotriz<br />
<br />
Fig. <strong>6.</strong>6 relaciones incrementales entre<br />
carga fuerza <strong>de</strong> <strong>corte</strong> y <strong>momento</strong> flector, para un<br />
elemento infinitesimal <strong>de</strong> la viga.<br />
Análogamente para el caso <strong>de</strong>l <strong>momento</strong>, tenemos que el incremento <strong>de</strong>l <strong>momento</strong> estará dado por:<br />
∆ ∆ ∆1 2<br />
∆ 1 2<br />
∆∆1 6<br />
∆<br />
Factorizando por Δs, obtenemos:<br />
∆<br />
∆ 1<br />
2<br />
∆ 1<br />
6 ∆∆<br />
Haciendo nuevamente el límite tendiendo a cero, obtenemos la relación entre el <strong>corte</strong> y el <strong>momento</strong><br />
flector en una sección <strong>de</strong>terminada, a saber:<br />
(<strong>6.</strong>2) <br />
<br />
<br />
Las ecuaciones (<strong>6.</strong>1) y (<strong>6.</strong>2) tienen gran importancia, ya que representan completamente la relación<br />
entre la carga distribuida, cortante y flexionante. Estas relaciones también son válidas para fuerzas
52<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
concentradas, y para <strong>momento</strong>s y distribuciones <strong>de</strong> carga distribuidas, pero su <strong>de</strong>mostración escapa<br />
a los objetivos <strong>de</strong>l curso.<br />
Corolario:<br />
• La solución buscada en este tipo <strong>de</strong> problemas, no es un valor <strong>de</strong>terminado, sino encontrar<br />
una función que nos entregue el valor <strong>de</strong> la solicitación buscada en cualquier lugar <strong>de</strong> la viga<br />
analizada.<br />
• La tasa <strong>de</strong> cambio <strong>de</strong> la fuerza cortante en un punto es igual al valor <strong>de</strong> la carga distribuida<br />
en ese punto.<br />
• La tasa <strong>de</strong> cambio <strong>de</strong>l <strong>momento</strong> flector en un punto <strong>de</strong> la viga es igual al valor <strong>de</strong> la fuerza<br />
<strong>de</strong> <strong>corte</strong> en ese punto.<br />
• Del cálculo, sabemos que una función tendrá un “punto crítico” que pue<strong>de</strong> ser un valor <strong>de</strong><br />
máximo o mínimo y que saldrá <strong>de</strong> igualar la primera <strong>de</strong>rivada a cero, para el caso <strong>de</strong>l<br />
<strong>momento</strong>, este punto crítico saldrá <strong>de</strong> hacer q(s)=0.<br />
• NOTA: Cuando se habla <strong>de</strong> punto <strong>de</strong> la viga, se consi<strong>de</strong>ra que se habla <strong>de</strong> un punto ubicado<br />
a lo largo <strong>de</strong>l eje <strong>de</strong> la viga. En capítulos posteriores se discutirá sobre las solicitaciones<br />
internas que se producen <strong>de</strong>ntro <strong>de</strong> una sección y su análisis.<br />
<strong>6.</strong>3 Construcción <strong>de</strong>l diagrama <strong>de</strong> <strong>corte</strong> y <strong>momento</strong><br />
En primer lugar, obtenga el DCL <strong>de</strong> la viga, consi<strong>de</strong>rando todas sus solicitaciones externas y<br />
obtenga los valores <strong>de</strong> las reacciones mediante las ecuaciones <strong>de</strong> equilibrio, note que el problema<br />
<strong>de</strong>be ser ISOSTÁTICO, <strong>de</strong> otra forma <strong>de</strong>berá buscar algún método <strong>de</strong> resolución para <strong>de</strong>terminar las<br />
reacciones <strong>de</strong>l sistema.<br />
Acto seguido, estas reacciones se consi<strong>de</strong>ran como fuerzas externas sobre el sistema consi<strong>de</strong>rando<br />
la dirección correcta en la que se encuentran aplicadas, ya que <strong>de</strong>bieron suponerse para resolver las<br />
ecuaciones <strong>de</strong> equilibrio.<br />
Como ya sabemos, lo que se busca en este análisis no es un valor <strong>de</strong>terminado, sino encontrar la<br />
ECUACIÓN que entregue en cada punto <strong>de</strong> la viga, los valores <strong>de</strong> fuerza <strong>de</strong> <strong>corte</strong>, <strong>momento</strong> flector y<br />
fuerza axial si la hubiera.<br />
En este punto <strong>de</strong>bemos <strong>de</strong> realizar los “<strong>corte</strong>s” ya que las cargas buscadas <strong>de</strong> <strong>corte</strong> y <strong>momento</strong><br />
ocurren al interior <strong>de</strong> la viga, <strong>de</strong>be realizarse un <strong>corte</strong> en ésta. Como sabemos si un sistema se<br />
encuentra en equilibrio, entonces, sus componentes también lo estarán, así es que si consi<strong>de</strong>ramos<br />
solo la porción <strong>de</strong> viga en la dirección consi<strong>de</strong>rada, con las cargas que estén contenidas <strong>de</strong>ntro <strong>de</strong> la<br />
porción, <strong>de</strong>berá permanecer en equilibrio estático.<br />
Otro punto importante es que si escogimos la dirección <strong>de</strong> “izquierda a <strong>de</strong>recha” en una viga,<br />
entonces, el resultado <strong>de</strong>berá ser el mismo para las fuerzas buscadas (Corte y <strong>momento</strong>) que si<br />
hubiéramos seguido el camino inverso, es <strong>de</strong>cir, <strong>de</strong> <strong>de</strong>recha a izquierda.
53<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Ejemplo: Para la viga <strong>de</strong> la figura adjunta, se tiene una carga distribuida q= -10 lb /in. Se solicita<br />
obtener los diagramas <strong>de</strong> <strong>corte</strong> y <strong>momento</strong>.<br />
Primeramente <strong>de</strong>bemos obtener las reacciones <strong>de</strong> la viga, al ser el apoyo <strong>de</strong> la izquierda un apoyo<br />
fijo, tenemos una reacción vertical y otra horizontal, mientras que el apoyo izquierdo, es un apoyo<br />
fijo, por lo que solo tiene una reacción vertical.<br />
Obteniendo la carga equivalente para la carga para la distribución uniforme, tenemos que esta es<br />
10x180 lb, la cual se encuentra ubicada en el centro <strong>de</strong> la carga distribuida, vale <strong>de</strong>cir con z=90 in, o<br />
a 70 in a la <strong>de</strong>recha <strong>de</strong>l <strong>de</strong>scanso A.<br />
Luego, haciendo la sumatoria <strong>de</strong> <strong>momento</strong>s respecto al <strong>de</strong>scanso A, obtenemos que:<br />
1800x70 – 120 RB = 0<br />
Luego, RB = 1050 lb (hacia arriba)<br />
De la misma forma, haciendo ΣMB = 0:<br />
-1800x20 + 120 RA =0<br />
Luego, RA =750 lb (hacia arriba)<br />
Corte I: válido para 0 < z < 20 in<br />
Luego, para <strong>de</strong>terminar el valor <strong>de</strong> la V(z) y M(z) resolvemos el DCL <strong>de</strong> la sección mostrada <strong>de</strong> la<br />
porción variable <strong>de</strong> la figura, para ello, <strong>de</strong>bemos obtener el valor equivalente <strong>de</strong> la carga distribuida<br />
solo en la porción variable consi<strong>de</strong>rada en la figura, para ello tenemos que el área bajo la carga<br />
distribuida será q·z.<br />
Al no tener más fuerzas actuando en esta sección, tenemos que V(z) = -qz
54<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Luego, para el <strong>momento</strong>, tenemos que la única carga aplicada en esta porción <strong>de</strong> barra es la porción<br />
<strong>de</strong> carga distribuida, obtenida anteriormente, ubicada en el punto medio <strong>de</strong> esta porción <strong>de</strong> viga, o<br />
sea en z/2.<br />
Con esto obtenemos que:<br />
ΣMI=0 10·· <br />
Luego M(z) = 5z 2<br />
<br />
Con esto se prueba la relación que la <strong>de</strong>rivada <strong>de</strong> M(z) correspon<strong>de</strong> a V(z)<br />
Corte II: válido para 20 < z < 140 in<br />
En esta porción <strong>de</strong> viga, tenemos a<strong>de</strong>más <strong>de</strong> una parte más extensa <strong>de</strong> la carga distribuida la<br />
reacción la reacción A, luego, resolviendo el DCL obtenemos las expresiones <strong>de</strong> V(z) y M(z), a<br />
saber:<br />
Corte III: válido para 140 < z < 180 in<br />
ΣFY=0 V(z) = 750 – 10z<br />
ΣMII= 0 M(z) =750 (z-20) - 5z 2<br />
De acuerdo al DCL mostrado en la figura adjunta, resolvemos la condición <strong>de</strong> equilibrio:<br />
ΣFY=0 V(z) = 750 +1050 – 10z = 1800 – 10z<br />
ΣMIII= 0 M(z) =750 (z-20) + 1050 (z-140) - 5z 2
55<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Finalmente, po<strong>de</strong>mos construir las funciones <strong>de</strong>finidas por tramos a través <strong>de</strong> los <strong>corte</strong>s I al III que<br />
consi<strong>de</strong>ran los cambios en las condiciones <strong>de</strong> carga a lo largo <strong>de</strong> toda la viga y con ellos po<strong>de</strong>mos<br />
construir los diagramas <strong>de</strong> fuerza cortante y <strong>momento</strong> flector, según lo muestra la figura adjunta:<br />
Notas:<br />
• El diagrama <strong>de</strong> <strong>momento</strong> es continuo a lo largo <strong>de</strong> su rango <strong>de</strong> vali<strong>de</strong>z.<br />
• Las cargas puntuales aparecen claramente en el diagrama <strong>de</strong> <strong>corte</strong>, representando las<br />
discontinuida<strong>de</strong>s <strong>de</strong> esta función.
<strong>6.</strong>3.1 Ejercicios<br />
56<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Para las siguientes configuraciones <strong>de</strong> viga, se solicita <strong>de</strong>terminar los diagramas <strong>de</strong> fuerza <strong>de</strong> <strong>corte</strong> y<br />
<strong>momento</strong>, en el caso <strong>de</strong> tener valores numéricos, consi<strong>de</strong>re las cargas en toneladas y las distancias<br />
en metros:<br />
(a)<br />
(c)<br />
(e)<br />
(g)<br />
(b)<br />
(d)<br />
(f)<br />
(h)
57<br />
7 FLEXIÓN<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Aunque los <strong>momento</strong>s que provocan la flexión son, por lo general, el resultado <strong>de</strong> la transmisión <strong>de</strong><br />
fuerzas transversales (<strong>corte</strong>), la teoria <strong>de</strong> flexión se <strong>de</strong>sarrolla <strong>de</strong> forma más simple para el análisis,<br />
consi<strong>de</strong>rar la existencia <strong>de</strong> flexión pura. Esta condición <strong>de</strong> carga, pue<strong>de</strong> obtenerse en una prueba en<br />
la que la porción central <strong>de</strong> un elemento se encuentre solicitada bajo flexión pura (fig.7.1 y 7.2). Pero<br />
no po<strong>de</strong>mos per<strong>de</strong>r <strong>de</strong> vista que en las cercanías <strong>de</strong>l lugar don<strong>de</strong> se aplica la carga, existe una<br />
compleja distribución <strong>de</strong> esfuerzos.<br />
7.1 Mo<strong>de</strong>lo <strong>de</strong> flexión<br />
Fig. 7.1 Fig. 7.2<br />
El mo<strong>de</strong>lo que utilizaremos para analizar la flexión es una viga recta y con sección transversal<br />
constante. Como se estableció en las hipótesis al principio <strong>de</strong>l curso, el material es Isotrópico y<br />
homogéneo. La sección transversal es simétrica con respecto a una línea central contenida en el<br />
plano <strong>de</strong> flexión (más a<strong>de</strong>lante veremos qué pasa cuando esto no ocurre).<br />
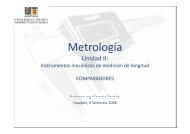
Analizando la figura 7.3 tenemos un estado puro <strong>de</strong> flexion, combando la viga con una curvatura<br />
conocida ( 1 /R) como se aprecia tenemos que el eje <strong>de</strong> la viga – originalmente recto- se ha<br />
transformado en un arco <strong>de</strong> radio R.<br />
La curvatura <strong>de</strong> una línea se <strong>de</strong>fine como:<br />
(7.1)<br />
1 <br />
<br />
<br />
Don<strong>de</strong> R= radio <strong>de</strong> curvatura.<br />
d= cambio infinitesimal <strong>de</strong>l ángulo formado por la tangente sobre la longitud.<br />
ds = longitud infinitesimal a lo largo <strong>de</strong> la línea curva.
58<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Para reducir el número <strong>de</strong> símbolos <strong>de</strong> <strong>de</strong>rivadas, sustituiremos ds por una pequeña longitud finita<br />
L0 que representa la distancia entre dos planos paralelos que pasan a través <strong>de</strong> la viga, inicialmente<br />
recta. Estos planos son normales respecto al eje z.<br />
Consi<strong>de</strong>rando que “Las secciones transversales inicialmente plantas, permanecen planas” tenemos<br />
que la figura 7.3c, esta consi<strong>de</strong>ración nos permite dibujar la línea B’B’ como una línea recta. Se ha<br />
girado con un ángulo d (Con respecto a la posición original BB) alre<strong>de</strong>dor <strong>de</strong> algún eje que cae en<br />
la sección transversal. Este eje recibe el nombre <strong>de</strong> “eje neutro” (EN) que es un eje que aún cuando<br />
tenga un radio <strong>de</strong> curvatura tiene cero <strong>de</strong>formación. Esto queda más claro en la fig. 7.3d don<strong>de</strong> se<br />
ve la distribución <strong>de</strong> esfuerzos al interior <strong>de</strong> la sección analizada, partiendo <strong>de</strong> la lógica que “No<br />
habiendo esfuerzos, no se pue<strong>de</strong> tener <strong>de</strong>formaciones”. La ubicación <strong>de</strong> este eje neutro, se <strong>de</strong>finirá<br />
más a<strong>de</strong>lante.<br />
El plano x-z que contiene a los ejes neutros <strong>de</strong> secciones transversales adyacentes se llama “plano<br />
neutro”. El cual, a su vez, será el plano con <strong>de</strong>formación cero.<br />
Tal como se aprecia en la fig. 7.3c se consi<strong>de</strong>ra una “fibra” <strong>de</strong> longitud original Li sufre un cambio en<br />
su longitud. Este aumento <strong>de</strong> longitud δi <strong>de</strong> una fibra situada a una distancia yi <strong>de</strong>l eje neutro pue<strong>de</strong><br />
hallarse sustituyendo en la ecuación <strong>de</strong> los valores <strong>de</strong> d para el pequeño triángulo sombreado<br />
(BDB’) y el triángulo COD:<br />
<br />
<br />
De don<strong>de</strong> <br />
La <strong>de</strong>formación normal <strong>de</strong> la fibra en yi, se <strong>de</strong>fine como δi/Li.<br />
<br />
<br />
Para una viga que es inicialmente recta, tendremos que todas las fibras Li tienen la misma longitud<br />
original L0 y L0/Li es unitario y adimensional. Luego, tenemos que la <strong>de</strong>formación normal (ingenieril)<br />
para la flexión pura está dada por:
59<br />
(b)<br />
(a)<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
(d)<br />
Fig. 7.3 Flexión pura para una viga recta, cuya sección transversal es simétrica<br />
(c)
60<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
El esfuerzo normal en un punto que se encuentra ubicado a una distancia “y” <strong>de</strong>l plano neutro se<br />
pue<strong>de</strong> <strong>de</strong>terminar por la relación entre esfuerzo y <strong>de</strong>formación. Para una viga esbelta (vale <strong>de</strong>cir,<br />
una relación entre largo y ancho, relativamente alta), se tiene que EN EL RANGO ELÁSTICO, el<br />
esfuerzo se encuentra dado por:<br />
<br />
<br />
La fuerza axial total se <strong>de</strong>terminará multiplicando cada elemento <strong>de</strong> área “dA” por el esfuerzo normal<br />
que actúa sobre dicha área dA, para dar el valor <strong>de</strong> la carga que lo provoca dP, luego, integrando dP<br />
sobre toda el área <strong>de</strong> la sección transversal tendremos que:<br />
<br />
<br />
<br />
<br />
<br />
La segunda integral no es otra cosa que el <strong>momento</strong> inercia <strong>de</strong> área <strong>de</strong><br />
lEscriba aquí la ecuación.a sección transversal. Luego se requiere que una fuerza axial P para<br />
po<strong>de</strong>r combar la viga a través <strong>de</strong>l eje neutro. Pero para tener la condición <strong>de</strong> flexión pura, <strong>de</strong>be<br />
cumplirse que P=0, por lo que el eje neutro <strong>de</strong> la sección <strong>de</strong>be pasar por el controi<strong>de</strong> <strong>de</strong> la sección<br />
transversal, para la flexión pura, en el rango elástico.<br />
Luego para encontrar el <strong>momento</strong> resultante M <strong>de</strong> la distribución interna <strong>de</strong> esfuerzo, se <strong>de</strong>be<br />
multiplicar cada fuerza elemental dP por su distancia al eje neutro, para obtener dM, luego, la<br />
integración sobre toda la sección transversal resulta:<br />
<br />
<br />
<br />
<br />
<br />
<br />
Esta última integran se conoce como “<strong>momento</strong> <strong>de</strong> inercia” (o segundo <strong>momento</strong> <strong>de</strong> área) <strong>de</strong> la<br />
sección transversal (con respecto al eje x en este caso), vale <strong>de</strong>cir<br />
<br />
<br />
Reemplazando la expresión <strong>de</strong>l <strong>momento</strong> <strong>de</strong> inercia en la <strong>de</strong>l <strong>momento</strong> resultante, obtenemos:<br />
<br />
<br />
Este sería el <strong>momento</strong> que se requiere para producir la curvatura ( 1 /R) cuando los esfuerzos cuando<br />
estos pertenecen al rango elástico. La ecuación anterior se pue<strong>de</strong> reescribir <strong>de</strong> la siguiente forma:<br />
<br />
<br />
<br />
<br />
De don<strong>de</strong> dΦ/ds= 1/R y la cantidad EI representa la resistencia elástica <strong>de</strong> una viga en contra <strong>de</strong> la<br />
curvatura. Esta ecuación es la base para la teoría <strong>de</strong> <strong>de</strong>splazamiento por flexión elástica en vigas.<br />
Finalmente, el esfuerzo normal en cualquier punto sobre la sección transversal se encuentra al<br />
sustituir el valor anterior <strong>de</strong> 1/R en la ecuación siguiente:
61<br />
<br />
<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Lo que nos entrega como resultado, la expresión <strong>de</strong>l esfuerzo flector sobre una viga, que es <strong>de</strong> la<br />
forma:<br />
<br />
<br />
Esta es la expresión general <strong>de</strong> la ecuación utilizada para calcular esfuerzos (que al tratarse <strong>de</strong><br />
flexión pura se dice generalmente “esfuerzo flector o esfuerzo <strong>de</strong> flexión) en una viga <strong>de</strong> sección<br />
transversal simétrica sujeta a un <strong>momento</strong> <strong>de</strong> flexión pura, cuando los esfuerzos permanecen en el<br />
rango elástico (lo que implica una distribución lineal <strong>de</strong> esfuerzos) como se mostró en la figura 7.3c)<br />
Es importante hacer notar que esta expresión es in<strong>de</strong>pendiente <strong>de</strong>l valor <strong>de</strong> E. ya que el material<br />
tiene una relación lineal <strong>de</strong> esfuerzo-<strong>de</strong>formación.<br />
Por otro lado, tenemos que el valor <strong>de</strong>l esfuerzo para una carga y sección dada solo podrá variar en<br />
función <strong>de</strong> la distancia a la línea neutra en el eje consi<strong>de</strong>rado, por lo que los valores máximos se<br />
alcanzarán en “las fibras” extremas <strong>de</strong> la sección.<br />
Cálculo <strong>de</strong> la posición <strong>de</strong>l eje neutro<br />
Como se dijo anteriormente este eje es a través <strong>de</strong>l cual no se producen esfuerzos y, por en<strong>de</strong>, no<br />
tendrá <strong>de</strong>formación.<br />
Para secciones simples, como círculos, cuadrados y otros, la ubicación <strong>de</strong>l eje neutro siempre estará<br />
centrada <strong>de</strong> acuerdo a los ejes coor<strong>de</strong>nados, el problema surge para analizar secciones complejas o<br />
compuestas en las que el procedimiento no es otro que <strong>de</strong>scomponer la sección compleja en un<br />
conjunto <strong>de</strong> secciones simples, obteniéndose la siguiente expresión para el cálculo:<br />
<br />
· · <br />
<br />
De don<strong>de</strong>,<br />
AT: área total <strong>de</strong> la sección consi<strong>de</strong>rada.<br />
y: Posición <strong>de</strong>l eje neutro, que es lo que se busca <strong>de</strong>spejar.<br />
Ai: área <strong>de</strong> la i-ésima sección simple que conforman la sección compleja<br />
yi: distancia existente entre un punto <strong>de</strong> referencia y el centro <strong>de</strong> la i-ésima sección simple que<br />
compone a la sección compleja.
62<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Nota: es importante hacer notar que todas las distancias <strong>de</strong>ben <strong>de</strong> ser medidas <strong>de</strong>s<strong>de</strong> un punto <strong>de</strong><br />
referencia único para todas las secciones componente y para la ubicación <strong>de</strong>l eje neutro con<br />
respecto a esta referencia.<br />
Cálculo <strong>de</strong>l <strong>momento</strong> <strong>de</strong> inercia <strong>de</strong> una sección<br />
Es muy importante establecer que en cuerpo pue<strong>de</strong> flectarse con respecto a cualquiera <strong>de</strong> sus ejes<br />
coor<strong>de</strong>nados, es por eso que no se <strong>de</strong>be per<strong>de</strong>r <strong>de</strong> vista que tendremos distintas posiciones tanto <strong>de</strong><br />
ejes neutros como valores <strong>de</strong> <strong>momento</strong>s <strong>de</strong> inercia.<br />
En función <strong>de</strong>l eje en torno al cual se <strong>de</strong>sea flectar la viga, se <strong>de</strong>be tener en cuenta que, al igual que<br />
el caso anterior, existen dos formas <strong>de</strong> obtener el <strong>momento</strong> <strong>de</strong> inercia, si no <strong>de</strong>seamos realizar en<br />
cada oportunidad la integración <strong>de</strong> un elemento <strong>de</strong> área, entonces <strong>de</strong>bemos consi<strong>de</strong>rar secciones<br />
simples o grupos <strong>de</strong> secciones simples que conformen una sección compleja, cuya solución sea ya<br />
conocida.<br />
Para el caso <strong>de</strong> secciones circulares masisas, tenemos simetría en los ejes, por lo que será<br />
indistinto el eje con respecto al cual tenemos la <strong>de</strong>formación, esta sería <strong>de</strong> la siguiente forma:<br />
<br />
64<br />
Don<strong>de</strong> D: Diámetro <strong>de</strong> <strong>de</strong> la sección consi<strong>de</strong>rada<br />
Para el caso <strong>de</strong> un cilindro hueco, lógicamente lo que <strong>de</strong>bemos realizar es la sustracción <strong>de</strong>l área<br />
que no existe, lo que en la expresión <strong>de</strong>l <strong>momento</strong> <strong>de</strong> inercia será:<br />
<br />
<br />
64<br />
Don<strong>de</strong> claramente tendremos la diferencia entre diámetros externos e internos.<br />
Para una sección rectangular, tenemos que a diferencia <strong>de</strong> una sección circular que es simétrica, no<br />
será lo mismo en torno a que eje se realizará la flexión, por lo que esta es mucho más lógica<br />
presentarla <strong>de</strong> la siguiente forma:<br />
· <br />
<br />
12<br />
Luego en función <strong>de</strong>l eje que se quiera flectar, siempre se enten<strong>de</strong>rá que esto ocurrirá siempre <strong>de</strong><br />
forma que sea la altura quien resista principalmente el esfuerzo flector. Esto se verá explicado con<br />
un ejemplo más a<strong>de</strong>lante:
Teorema <strong>de</strong> Steiner<br />
63<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Este teorema se utiliza para <strong>de</strong>terminar el <strong>momento</strong> <strong>de</strong> inercia resultante <strong>de</strong> una sección compleja,<br />
en la cual coexisten varias secciones simples. Este teorema también es conocido como <strong>de</strong> “Ejes<br />
paralelos” ya que una vez situada la línea neutra, la distancia buscada para trasladar el <strong>momento</strong> <strong>de</strong><br />
inercia <strong>de</strong>s<strong>de</strong> el centro <strong>de</strong> la sección simple hasta el eje neutro <strong>de</strong> la sección completa no hasta el<br />
punto en don<strong>de</strong> se encuentra ubicado el eje neutro.<br />
Luego, la expresión que <strong>de</strong>termina el <strong>momento</strong> <strong>de</strong> inercia <strong>de</strong> una sección simple con respecto al eje<br />
neutro será:<br />
<br />
Don<strong>de</strong>,<br />
Ip= Momento <strong>de</strong> inercia <strong>de</strong> una sección simple con respecto al punto “p” buscado<br />
I0= Momento <strong>de</strong> inercia <strong>de</strong> la sección con respecto a SU CENTRO GEOMÉTRICO.<br />
A= Área <strong>de</strong> la sección simple consi<strong>de</strong>rada.<br />
d= Distancia paralela, medida <strong>de</strong>s<strong>de</strong> el centro <strong>de</strong> la sección simple, hasta a ubicación <strong>de</strong>l eje neutro<br />
Ejemplo:<br />
La sección <strong>de</strong> viga “T” <strong>de</strong> la figura está solicitada por un <strong>momento</strong> M= 8(Kips•ft), se solicita<br />
<strong>de</strong>terminar:<br />
• La ubicación <strong>de</strong>l eje neutro.<br />
• El <strong>momento</strong> <strong>de</strong> inercia <strong>de</strong> la sección respecto <strong>de</strong> su eje neutro.<br />
• Es esfuerzo máximo en tensión y compresión para la sección.
Resolución Problema:<br />
a) Ubicación <strong>de</strong>l eje neutro<br />
La expresión para <strong>de</strong>terminar el eje neutro es la siguiente:<br />
− ∑ Ai<br />
⋅ yi<br />
y =<br />
A<br />
64<br />
∑<br />
i<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
Como se aprecia en la figura, es claro que las áreas <strong>de</strong> los dos rectángulos componentes <strong>de</strong> la<br />
sección son iguales y valen 5 (in 2 ). Luego el área total será <strong>de</strong> 10 (in 2 )<br />
Luego, los valores <strong>de</strong> yi son los siguientes:<br />
Consi<strong>de</strong>rando el eje <strong>de</strong> referencia en el punto inferior <strong>de</strong> la viga, tenemos que para la sección<br />
superior es <strong>de</strong> 5,5 (in) y para el rectángulo inferior un valor <strong>de</strong> 2,5 (in).<br />
Con estos valores, reemplazamos y obtenemos:<br />
− 5⋅ 5,<br />
5 + 5⋅<br />
2,<br />
5<br />
y =<br />
(in) = 4 (in)<br />
10<br />
b) Momento <strong>de</strong> inercia con respecto al centro <strong>de</strong> gravedad <strong>de</strong> la sección<br />
Sabemos que, para una sección rectangular, el <strong>momento</strong> <strong>de</strong> inercia tiene la siguiente expresión:<br />
1 3<br />
I = bh<br />
12<br />
Esta expresión nos entrega el valor <strong>de</strong>l <strong>momento</strong> <strong>de</strong> inercia con respecto al centro <strong>de</strong>l rectángulo<br />
calculado, por lo que se <strong>de</strong>be trasladar según el teorema <strong>de</strong> Steiner al punto calculado en el punto<br />
anterior.<br />
Luego, para la sección superior:<br />
b=5 (in) y h= 1 (in)<br />
1 3 5 4<br />
I G 1 = 5⋅1<br />
= ( in )<br />
12 12<br />
Trasladando este <strong>momento</strong> hasta el centro <strong>de</strong> la sección tenemos que la distancia es <strong>de</strong> 5,5 – 4 (in)<br />
= 1,5 (in)<br />
Para el rectángulo inferior, tenemos que b = 1 (in) y que h = 5 (in) la expresión <strong>de</strong>l <strong>momento</strong> <strong>de</strong><br />
inercia es:<br />
1 3 125 4<br />
I G 2 = 1⋅<br />
5 = ( in ) , este <strong>momento</strong> <strong>de</strong>be trasladarse en 4 - 2,5 = 1,5 (in)<br />
12 12<br />
Finalmente la expresión <strong>de</strong>l <strong>momento</strong> <strong>de</strong> la sección con respecto al centro es la siguiente:<br />
2 5<br />
2 125<br />
2<br />
4<br />
I<br />
G = ∑ I G + ∑ Ai<br />
⋅ yi<br />
= + 5⋅1,<br />
5 + + 5⋅1,<br />
5 = 33,3 ( in )<br />
12 12
65<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
c) Momentos máximos en tensión y compresión<br />
Como sabemos la expresión <strong>de</strong>l <strong>momento</strong> flector es la siguiente:<br />
M ⋅ y<br />
σ = , don<strong>de</strong> I fue calculado en el punto anterior e y correspon<strong>de</strong> a la distancia entre la línea<br />
I<br />
neutra (calculada en el punto a) y el punto más alejado <strong>de</strong> la sección.<br />
Esfuerzo en compresión (superior): Entonces y = 2 (in)<br />
σ C<br />
8000(<br />
lb ⋅ ft)<br />
⋅ 2(<br />
in)<br />
12 (in)<br />
= −<br />
⋅ =<br />
4<br />
33,<br />
3 (in ) 1(ft)<br />
Esfuerzo en tracción (inferior): y = 4 (in)<br />
σ C<br />
8000 4 12<br />
11,<br />
53 (ksi)<br />
2<br />
33,<br />
3<br />
=<br />
⋅ ⋅ ⎡ lb ⎤<br />
=<br />
⎢<br />
⎣in<br />
⎥<br />
⎦<br />
Limitaciones <strong>de</strong>l método<br />
5,<br />
77 (ksi)<br />
El método presentado tiene las siguientes limitaciones, a saber:<br />
El método usado solo fue consi<strong>de</strong>rando una sección simétrica, por lo que nos aseguraba que los<br />
ejes neutros coincidirían con nuestros ejes <strong>de</strong> referencia, luego, al no tener una sección simétrica,<br />
estos ejes aparecerían “rotados” lo que nos exige un proceso más complejo que la mera traslación<br />
utilizando Steiner, como sigue:<br />
Mientras tenemos que el supuesto para <strong>de</strong>formación pura <strong>de</strong> una sección simétrica parte <strong>de</strong> la<br />
1 dφ<br />
condición <strong>de</strong> una curva conocida <strong>de</strong> <strong>de</strong> la forma = , por su parte, cuando la sección no es<br />
simétrica, tenemos que consi<strong>de</strong>rar a la <strong>de</strong>formación supuesta, producto <strong>de</strong> la flexión pura, como<br />
sigue:<br />
luego, para resolver este problema, aparecerán los “productos <strong>de</strong> inercia” Ixy, Iyz e Ixz.<br />
Finalmente la expresión <strong>de</strong>l esfuerzo flector queda <strong>de</strong> la siguiente forma:<br />
R<br />
ds
Ejercicios propuestos:<br />
66<br />
Resistencia <strong>de</strong> los Materiales<br />
Técnico Universitario en Mecánica Automotriz<br />
1. Se solicita <strong>de</strong>terminar el valor máximo en tracción y compresión para el esfuerzo flector que es<br />
producido por un <strong>momento</strong> Mf = 100 (lf in). Consi<strong>de</strong>re que este <strong>momento</strong> se aplica en una primera<br />
instancia para flectar la viga con respecto al eje “x” propuesto y posteriormente con respecto al eje<br />
“y”.