Análisis biomecánico al lanzamiento Hammer en Frisbee Ultimate
Análisis biomecánico al lanzamiento Hammer en Frisbee Ultimate
Análisis biomecánico al lanzamiento Hammer en Frisbee Ultimate

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Viref-048<br />
<strong>Análisis</strong> An lisis <strong>biomecánico</strong> biomec nico <strong>al</strong> <strong>lanzami<strong>en</strong>to</strong><br />
<strong>Hammer</strong> <strong>en</strong> <strong>Frisbee</strong> <strong>Ultimate</strong><br />
Por: Cristiam Paul Tejada Otero<br />
Estudiante de sexto semestre de Lic<strong>en</strong>ciatura. Instituto Universitario de<br />
Educación Física, Universidad de Antioquia. Medellín, Colombia. 2007<br />
Autoriza la publicación:<br />
Profesor Carlos Alberto Agudelo Velásquez.<br />
Lic<strong>en</strong>ciado <strong>en</strong> Educación Física, Especi<strong>al</strong>ista <strong>en</strong> Entr<strong>en</strong>ami<strong>en</strong>to Deportivo.
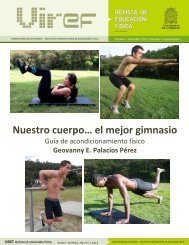
Lanzami<strong>en</strong>to <strong>Hammer</strong><br />
INTRODUCCION<br />
Con este análisis se pret<strong>en</strong>de<br />
evid<strong>en</strong>ciar la importancia del<br />
ángulo que forma el antebrazo<br />
para el <strong>lanzami<strong>en</strong>to</strong> hammer; así<br />
también registrar la velocidad y la<br />
amplitud del movimi<strong>en</strong>to (<strong>en</strong><br />
grados) hasta la s<strong>al</strong>ida del<br />
frisbee.
<strong>Análisis</strong> An lisis Biomecánico<br />
Biomec nico – <strong>Ultimate</strong><br />
Modelo: Cristian Paul Tejada<br />
Peso: 57 kilos<br />
Gesto deportivo: Lanzami<strong>en</strong>to de <strong>Hammer</strong><br />
Segm<strong>en</strong>to corpor<strong>al</strong>: Antebrazo (25 cm) cm)
Foto 1<br />
Foto 2<br />
Foto 3<br />
Foto 4<br />
Foto 5<br />
Foto 6<br />
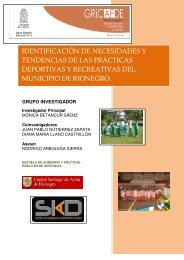
<strong>Análisis</strong> An lisis del Movimi<strong>en</strong>to<br />
21º 21<br />
40º 40<br />
80º 80<br />
125º 125<br />
152º 152<br />
165º 165<br />
Tramo Tramo Tramo Tramo 1<br />
1<br />
1<br />
1<br />
Tramo Tramo Tramo Tramo 2<br />
2<br />
2<br />
2<br />
Tramo Tramo Tramo Tramo Tramo 3<br />
3<br />
3<br />
3<br />
Tramo Tramo Tramo Tramo 4<br />
4<br />
4<br />
4<br />
Tramo Tramo Tramo Tramo 5<br />
5<br />
5<br />
5<br />
19 19º 19<br />
19<br />
40 40º 40<br />
40<br />
45 45º 45<br />
45<br />
27 27º 27<br />
27<br />
13 13º 13<br />
13
El c<strong>en</strong>tro de masa, la distancia,<br />
la velocidad y la aceleración. aceleraci n.<br />
Dr= Dr=<br />
25 cm * 0,433 = 10,82 cm<br />
Con el Arco de movimi<strong>en</strong>to se h<strong>al</strong>la la<br />
distancia  : d= Pi * r * ángulo ngulo<br />
180º 180<br />
La velocidad se h<strong>al</strong>la: V= distancia/tiempo.<br />
La aceleración aceleraci n se h<strong>al</strong>la: a = Vf – Vo /tiempo.
Datos anteriores<br />
Datos anteriores<br />
0,625<br />
0,625<br />
0,625<br />
0,625<br />
0,625<br />
0,625<br />
0,625<br />
0,625<br />
-169,6<br />
169,6<br />
169,6<br />
169,6<br />
169,6<br />
169,6<br />
169,6<br />
169,6<br />
19,6<br />
19,6<br />
19,6<br />
19,6<br />
19,6<br />
19,6<br />
19,6<br />
19,6<br />
2,45<br />
2,45<br />
2,45<br />
2,45<br />
2,45<br />
2,45<br />
2,45<br />
2,45<br />
13<br />
13<br />
13<br />
13<br />
13<br />
13<br />
13<br />
13º<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5 – F6<br />
F6<br />
F6<br />
F6<br />
F6<br />
F6<br />
F6<br />
F6<br />
0,5<br />
0,5<br />
0,5<br />
0,5<br />
0,5<br />
0,5<br />
0,5<br />
0,5<br />
-217,6<br />
217,6<br />
217,6<br />
217,6<br />
217,6<br />
217,6<br />
217,6<br />
217,6<br />
40,8<br />
40,8<br />
40,8<br />
40,8<br />
40,8<br />
40,8<br />
40,8<br />
40,8<br />
5,10<br />
5,10<br />
5,10<br />
5,10<br />
5,10<br />
5,10<br />
5,10<br />
5,10<br />
27<br />
27<br />
27<br />
27<br />
27<br />
27<br />
27<br />
27º<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4 – F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
F5<br />
0,375<br />
0,375<br />
0,375<br />
0,375<br />
0,375<br />
0,375<br />
0,375<br />
0,375<br />
60,8<br />
60,8<br />
60,8<br />
60,8<br />
60,8<br />
60,8<br />
60,8<br />
60,8<br />
68<br />
68<br />
68<br />
68<br />
68<br />
68<br />
68<br />
68<br />
8,50<br />
8,50<br />
8,50<br />
8,50<br />
8,50<br />
8,50<br />
8,50<br />
8,50<br />
45<br />
45<br />
45<br />
45<br />
45<br />
45<br />
45<br />
45º<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3 – F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
F4<br />
0,25<br />
0,25<br />
0,25<br />
0,25<br />
0,25<br />
0,25<br />
0,25<br />
0,25<br />
253,44<br />
253,44<br />
253,44<br />
253,44<br />
253,44<br />
253,44<br />
253,44<br />
253,44<br />
60,4<br />
60,4<br />
60,4<br />
60,4<br />
60,4<br />
60,4<br />
60,4<br />
60,4<br />
7,55<br />
7,55<br />
7,55<br />
7,55<br />
7,55<br />
7,55<br />
7,55<br />
7,55<br />
40<br />
40<br />
40<br />
40<br />
40<br />
40<br />
40<br />
40º<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2 – F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
F3<br />
0,125<br />
0,125<br />
0,125<br />
0,125<br />
0,125<br />
0,125<br />
0,125<br />
0,125<br />
xxxx<br />
xxxx<br />
xxxx<br />
xxxx<br />
xxxx<br />
xxxx<br />
xxxx<br />
xxxx<br />
28,72<br />
28,72<br />
28,72<br />
28,72<br />
28,72<br />
28,72<br />
28,72<br />
28,72<br />
3,59<br />
3,59<br />
3,59<br />
3,59<br />
3,59<br />
3,59<br />
3,59<br />
3,59<br />
19<br />
19<br />
19<br />
19<br />
19<br />
19<br />
19<br />
19º<br />
F1<br />
F1<br />
F1<br />
F1<br />
F1<br />
F1<br />
F1<br />
F1 - F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
F2<br />
Tiempo<br />
Tiempo<br />
Tiempo<br />
Tiempo<br />
Tiempo<br />
Tiempo<br />
Tiempo<br />
Tiempo<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
Aceleraci<br />
Aceleraci<br />
Aceleraci<br />
Aceleraci<br />
Aceleraci<br />
Aceleraci<br />
Aceleraci<br />
Aceleración<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm/seg<br />
/seg<br />
/seg<br />
/seg<br />
/seg<br />
/seg<br />
/seg<br />
/seg 2<br />
Velocidad<br />
Velocidad<br />
Velocidad<br />
Velocidad<br />
Velocidad<br />
Velocidad<br />
Velocidad<br />
Velocidad<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm/seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
seg<br />
Distancia<br />
Distancia<br />
Distancia<br />
Distancia<br />
Distancia<br />
Distancia<br />
Distancia<br />
Distancia<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
cm<br />
Grados<br />
Grados<br />
Grados<br />
Grados<br />
Grados<br />
Grados<br />
Grados<br />
Grados<br />
recorridos<br />
recorridos<br />
recorridos<br />
recorridos<br />
recorridos<br />
recorridos<br />
recorridos<br />
recorridos<br />
Tramo<br />
Tramo<br />
Tramo<br />
Tramo<br />
Tramo<br />
Tramo<br />
Tramo<br />
Tramo<br />
Fotos<br />
Fotos<br />
Fotos<br />
Fotos<br />
Fotos<br />
Fotos<br />
Fotos<br />
Fotos
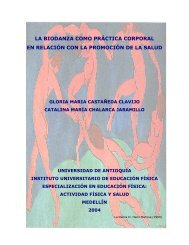
Distancia<br />
3,59<br />
3,59<br />
11,14<br />
11,14<br />
19,64<br />
19,64<br />
24,74<br />
24,74<br />
27,19<br />
27,19<br />
Tiempo<br />
0,125<br />
0,25<br />
0,375<br />
0,5<br />
0,625<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
Gráficas Gr ficas<br />
Distancia - Tiempo<br />
1 2 3 4 5 6
Velocidad<br />
28,72<br />
28,72<br />
60,4<br />
60,4<br />
68<br />
40,8<br />
40,8<br />
19,6<br />
19,6<br />
Tiempo<br />
0,125<br />
0,25<br />
0,375<br />
0,5<br />
0,625<br />
75<br />
65<br />
55<br />
45<br />
35<br />
25<br />
15<br />
Gráficas Gr ficas<br />
28,72<br />
Velocidad - Tiempo<br />
60,4<br />
68<br />
40,8<br />
1 2 3 4 5<br />
19,6
Aceleración<br />
Aceleraci<br />
253,44<br />
253,44<br />
60,8<br />
60,8<br />
-217,6 217,6<br />
-169,6 169,6<br />
Tiempo<br />
0,25<br />
0,375<br />
0,5<br />
0,625<br />
300<br />
200<br />
100<br />
-100<br />
-200<br />
-300<br />
Gráficas Gr ficas<br />
0<br />
253,44<br />
Aceleración - Tiempo<br />
60,8<br />
1 2 3 4<br />
-217,6<br />
-169,6
C<strong>en</strong>tro de gravedad
Grafica – Foto 1<br />
3.07<br />
6.69
Foto 2
Gráfica Gr fica – Foto 2<br />
3.39<br />
6.48
Foto 3
Grafica – Foto 3<br />
2.99<br />
6.73
Planilla – cálculo lculo segm<strong>en</strong>t<strong>al</strong><br />
PLANILLA PARA LA APLICACIÓN DEL MÉTODO SEGMENTAL EN EL CÁLCULO DEL CENTRO DE GRAVEDAD DEL CUERPO HUMANO<br />
Segm<strong>en</strong>to Corpor<strong>al</strong><br />
Cabeza-Cuello<br />
Tronco<br />
Mano Derecha<br />
Antebrazo Derecho<br />
Brazo Derecho<br />
Mano Izquierda<br />
Antebrazo Izquierdo<br />
Brazo Izquierdo<br />
Pie Derecho<br />
Pierna Derecha<br />
Muslo Derecho<br />
Pie Izquierdo<br />
Pierna Izquierda<br />
Muslo Izquierdo<br />
X: C.G.<br />
Y: C.G.<br />
Xp<br />
Coord<strong>en</strong>adas Cartesianas<br />
2,9<br />
3,1<br />
2,1<br />
3,2<br />
3,6<br />
3,8<br />
3,6<br />
2,7<br />
3,6<br />
4<br />
4,1<br />
1,3<br />
1,5<br />
2,6<br />
Yp<br />
9,9<br />
6,1<br />
10,3<br />
10,2<br />
9,3<br />
5,7<br />
6,4<br />
7,5<br />
0,6<br />
1<br />
3,5<br />
0,7<br />
1,1<br />
3,4<br />
Xd<br />
3<br />
2,9<br />
3,2<br />
4,9<br />
4,4<br />
3,6<br />
2,7<br />
2,4<br />
4,9<br />
4,1<br />
3,3<br />
2,1<br />
2,6<br />
2,8<br />
Suma Tx/ 97.27<br />
Suma Ty/ 97.27<br />
Yd<br />
10,8<br />
9,9<br />
10,7<br />
10,7<br />
10,2<br />
6,4<br />
7,5<br />
8,7<br />
0,9<br />
3,5<br />
4,3<br />
0,9<br />
3,4<br />
5,4<br />
Xd-Xp<br />
0,1<br />
-0,2<br />
1,1<br />
1,7<br />
0,8<br />
-0,2<br />
-0,9<br />
-0,3<br />
1,3<br />
0,1<br />
-0,8<br />
0,8<br />
1,1<br />
0,2<br />
3,07<br />
6,69<br />
[(Xd-Xp)(D.R.)+Xp](P.R.)=Tx<br />
D.R.<br />
0,433<br />
0,495<br />
0,506<br />
0,433<br />
0,436<br />
0,506<br />
0,433<br />
0,436<br />
0,429<br />
0,433<br />
0,433<br />
0,429<br />
0,433<br />
0,433<br />
Xp<br />
2,9<br />
3,1<br />
2,1<br />
3,2<br />
3,6<br />
3,8<br />
3,6<br />
2,7<br />
3,6<br />
4<br />
4,1<br />
1,3<br />
1,5<br />
2,6<br />
P.R.<br />
7,61<br />
48,84<br />
0,64<br />
1,56<br />
2,63<br />
0,64<br />
1,56<br />
2,63<br />
1,42<br />
4,53<br />
9,63<br />
1,42<br />
4,53<br />
9,53<br />
suma<br />
Tx<br />
22,4<br />
146,6<br />
1,7<br />
6,14<br />
10,39<br />
2,367<br />
5,008<br />
6,757<br />
5,904<br />
18,32<br />
36,15<br />
2,333<br />
8,953<br />
25,6<br />
298,6<br />
Yd-Yp<br />
0,9<br />
3,8<br />
0,4<br />
0,5<br />
0,9<br />
0,7<br />
1,1<br />
1,2<br />
0,3<br />
2,5<br />
0,8<br />
0,2<br />
2,3<br />
2<br />
[(Yd-Yp)(D.R.)+Yp](P.R.)=Ty<br />
D.R.<br />
0,433<br />
0,495<br />
0,506<br />
0,433<br />
0,436<br />
0,506<br />
0,433<br />
0,436<br />
0,429<br />
0,433<br />
0,433<br />
0,429<br />
0,433<br />
0,433<br />
Yp<br />
9,9<br />
6,1<br />
10,3<br />
10,2<br />
9,3<br />
5,7<br />
6,4<br />
7,5<br />
0,6<br />
1<br />
3,5<br />
0,7<br />
1,1<br />
3,4<br />
P.R.<br />
7,61<br />
48,84<br />
0,64<br />
1,56<br />
2,63<br />
0,64<br />
1,56<br />
2,63<br />
1,42<br />
4,53<br />
9,63<br />
1,42<br />
4,53<br />
9,53<br />
Suma=<br />
Ty<br />
78,3<br />
389,8<br />
6,722<br />
16,25<br />
25,49<br />
3,875<br />
10,73<br />
21,1<br />
1,035<br />
9,434<br />
37,04<br />
1,116<br />
9,494<br />
40,65<br />
651
Planilla – cálculo lculo segm<strong>en</strong>t<strong>al</strong><br />
PLANILLA PARA LA APLICACIÓN DEL MÉTODO SEGMENTAL EN EL CÁLCULO DEL CENTRO DE GRAVEDAD DEL CUERPO HUMANO<br />
Segm<strong>en</strong>to Corpor<strong>al</strong><br />
Cabeza-Cuello<br />
Tronco<br />
Mano Derecha<br />
Antebrazo Derecho<br />
Brazo Derecho<br />
Mano Izquierda<br />
Antebrazo Izquierdo<br />
Brazo Izquierdo<br />
Pie Derecho<br />
Pierna Derecha<br />
Muslo Derecho<br />
Pie Izquierdo<br />
Pierna Izquierda<br />
Muslo Izquierdo<br />
X: C.G.<br />
Y: C.G.<br />
Coord<strong>en</strong>adas Cartesianas<br />
Xp<br />
3,4<br />
3,2<br />
5,5<br />
5,8<br />
4,3<br />
3,4<br />
3,8<br />
3,1<br />
3,8<br />
4,3<br />
4,4<br />
1,2<br />
1,5<br />
2,7<br />
Yp<br />
9,2<br />
6<br />
11,1<br />
9,6<br />
9,1<br />
5,6<br />
6,3<br />
7,4<br />
0,4<br />
0,8<br />
3,4<br />
0,8<br />
1<br />
3,2<br />
Xd<br />
3,5<br />
3,4<br />
4,9<br />
5,5<br />
5,8<br />
3,2<br />
3,1<br />
2,8<br />
5,4<br />
4,4<br />
3,4<br />
2,2<br />
2,7<br />
2,8<br />
Suma Tx/ 97.27<br />
Suma Ty/ 97.27<br />
Yd<br />
10,8<br />
9,2<br />
11,8<br />
11,1<br />
9,6<br />
6,3<br />
7,4<br />
8,9<br />
0,7<br />
3,4<br />
5,6<br />
0,7<br />
3,2<br />
5,5<br />
Xd-Xp<br />
0,1<br />
0,2<br />
-0,6<br />
-0,3<br />
1,5<br />
-0,2<br />
-0,7<br />
-0,3<br />
1,6<br />
0,1<br />
-1<br />
1<br />
1,2<br />
0,1<br />
3,39<br />
6,48<br />
[(Xd-Xp)(D.R.)+Xp](P.R.)=Tx<br />
D.R.<br />
0,433<br />
0,495<br />
0,506<br />
0,433<br />
0,436<br />
0,506<br />
0,433<br />
0,436<br />
0,429<br />
0,433<br />
0,433<br />
0,429<br />
0,433<br />
0,433<br />
Xp<br />
3,4<br />
3,2<br />
5,5<br />
5,8<br />
4,3<br />
3,4<br />
3,8<br />
3,1<br />
3,8<br />
4,3<br />
4,4<br />
1,2<br />
1,5<br />
2,7<br />
P.R.<br />
7,61<br />
48,84<br />
0,64<br />
1,56<br />
2,63<br />
0,64<br />
1,56<br />
2,63<br />
1,42<br />
4,53<br />
9,63<br />
1,42<br />
4,53<br />
9,53<br />
SUMA<br />
Tx<br />
26,20<br />
161,12<br />
3,33<br />
8,85<br />
13,03<br />
2,11<br />
5,46<br />
7,81<br />
6,37<br />
19,68<br />
38,20<br />
2,31<br />
9,15<br />
26,14<br />
329,76<br />
Yd-Yp<br />
1,6<br />
3,2<br />
0,7<br />
1,5<br />
0,5<br />
0,7<br />
1,1<br />
1,5<br />
0,3<br />
2,6<br />
2,2<br />
-0,1<br />
2,2<br />
2,3<br />
[(Yd-Yp)(D.R.)+Yp](P.R.)=Ty<br />
D.R.<br />
0,433<br />
0,495<br />
0,506<br />
0,433<br />
0,436<br />
0,506<br />
0,433<br />
0,436<br />
0,429<br />
0,433<br />
0,433<br />
0,429<br />
0,433<br />
0,433<br />
Yp<br />
9,2<br />
6<br />
11,1<br />
9,6<br />
9,1<br />
5,6<br />
6,3<br />
7,4<br />
0,4<br />
0,8<br />
3,4<br />
0,8<br />
1<br />
3,2<br />
P.R.<br />
7,61<br />
48,84<br />
0,64<br />
1,56<br />
2,63<br />
0,64<br />
1,56<br />
2,63<br />
1,42<br />
4,53<br />
9,63<br />
1,42<br />
4,53<br />
9,53<br />
SUMA<br />
Ty<br />
75,28<br />
370,40<br />
7,33<br />
15,99<br />
24,51<br />
3,81<br />
10,57<br />
21,18<br />
0,75<br />
8,72<br />
41,92<br />
1,08<br />
8,85<br />
39,99<br />
630,37
Planilla – cálculo lculo segm<strong>en</strong>t<strong>al</strong><br />
PLANILLA PARA LA APLICACIÓN DEL MÉTODO SEGMENTAL EN EL CÁLCULO DEL CENTRO DE GRAVEDAD DEL CUERPO HUMANO<br />
Segm<strong>en</strong>to Corpor<strong>al</strong><br />
Cabeza-Cuello<br />
Tronco<br />
Mano Derecha<br />
Antebrazo Derecho<br />
Brazo Derecho<br />
Mano Izquierda<br />
Antebrazo Izquierdo<br />
Brazo Izquierdo<br />
Pie Derecho<br />
Pierna Derecha<br />
Muslo Derecho<br />
Pie Izquierdo<br />
Pierna Izquierda<br />
Muslo Izquierdo<br />
X: C.G.<br />
Y: C.G.<br />
Coord<strong>en</strong>adas Cartesianas<br />
Xp<br />
3<br />
2,7<br />
6,7<br />
5,4<br />
3,4<br />
3,3<br />
3<br />
2,5<br />
3,4<br />
3,9<br />
3,7<br />
1,1<br />
1,5<br />
2,6<br />
Yp<br />
9,4<br />
6,4<br />
10<br />
9,4<br />
9,2<br />
5,9<br />
6,4<br />
7,6<br />
0,7<br />
1,1<br />
3,6<br />
1<br />
1,4<br />
3,7<br />
Xd<br />
3,2<br />
3<br />
7,5<br />
6,7<br />
5,4<br />
3<br />
2,5<br />
2,4<br />
4,4<br />
3,7<br />
3<br />
1,9<br />
2,6<br />
2,5<br />
Suma Tx/ 97.27<br />
Suma Ty/ 97.27<br />
Yd<br />
10,9<br />
9,4<br />
9,8<br />
10<br />
9,4<br />
6,4<br />
7,6<br />
9<br />
1<br />
3,6<br />
5,8<br />
0,9<br />
3,7<br />
5,8<br />
Xd-Xp<br />
0,2<br />
0,3<br />
0,8<br />
1,3<br />
2<br />
-0,3<br />
-0,5<br />
-0,1<br />
1<br />
-0,2<br />
-0,7<br />
0,8<br />
1,1<br />
-0,1<br />
2,99<br />
6,73<br />
[(Xd-Xp)(D.R.)+Xp](P.R.)=Tx<br />
D.R.<br />
0,433<br />
0,495<br />
0,506<br />
0,433<br />
0,436<br />
0,506<br />
0,433<br />
0,436<br />
0,429<br />
0,433<br />
0,433<br />
0,429<br />
0,433<br />
0,433<br />
Xp<br />
3<br />
2,7<br />
6,7<br />
5,4<br />
3,4<br />
3,3<br />
3<br />
2,5<br />
3,4<br />
3,9<br />
3,7<br />
1,1<br />
1,5<br />
2,6<br />
P.R.<br />
7,61<br />
48,84<br />
0,64<br />
1,56<br />
2,63<br />
0,64<br />
1,56<br />
2,63<br />
1,42<br />
4,53<br />
9,63<br />
1,42<br />
4,53<br />
9,53<br />
SUMA<br />
Tx<br />
23,49<br />
139,12<br />
4,55<br />
9,30<br />
11,24<br />
2,01<br />
4,34<br />
6,46<br />
5,44<br />
17,27<br />
32,71<br />
2,05<br />
8,95<br />
24,37<br />
291,30<br />
Yd-Yp<br />
1,5<br />
3<br />
-0,2<br />
0,6<br />
0,2<br />
0,5<br />
1,2<br />
1,4<br />
0,3<br />
2,5<br />
2,2<br />
-0,1<br />
2,3<br />
2,1<br />
[(Yd-Yp)(D.R.)+Yp](P.R.)=Ty<br />
D.R.<br />
0,433<br />
0,495<br />
0,506<br />
0,433<br />
0,436<br />
0,506<br />
0,433<br />
0,436<br />
0,429<br />
0,433<br />
0,433<br />
0,429<br />
0,433<br />
0,433<br />
Yp<br />
9,4<br />
6,4<br />
10<br />
9,4<br />
9,2<br />
5,9<br />
6,4<br />
7,6<br />
0,7<br />
1,1<br />
3,6<br />
1<br />
1,4<br />
3,7<br />
P.R.<br />
7,61<br />
48,84<br />
0,64<br />
1,56<br />
2,63<br />
0,64<br />
1,56<br />
2,63<br />
1,42<br />
4,53<br />
9,63<br />
1,42<br />
4,53<br />
9,53<br />
SUMA<br />
Ty<br />
76,48<br />
385,10<br />
6,34<br />
15,07<br />
24,43<br />
3,94<br />
10,79<br />
21,59<br />
1,18<br />
9,89<br />
43,84<br />
1,36<br />
10,85<br />
43,93<br />
654,78
3,6<br />
3,4<br />
3,2<br />
3<br />
2,8<br />
Gráfica Gr fica<br />
Desplazami<strong>en</strong>to de X <strong>en</strong> el tiempo<br />
0,125; 3,07<br />
0,375; 3,39<br />
0,625; 2,99<br />
0 0,2 0,4 0,6 0,8
6,8<br />
6,7<br />
6,6<br />
6,5<br />
6,4<br />
Grafica<br />
Desplazami<strong>en</strong>to de Y <strong>en</strong> el tiempo<br />
0,125; 6,69<br />
0,375; 6,48<br />
0,625; 6,73<br />
0 0,2 0,4 0,6 0,8
Resist<strong>en</strong>cia<br />
57kilos*9.8= 558.6N<br />
Peso del antebrazo derecho=<br />
558.6*(1.56/100) = 8.71 New – resist<strong>en</strong>cia.
Fuerza <strong>en</strong> el segm<strong>en</strong>to<br />
Peso: 57 kilos<br />
Br: Br:<br />
10.82 cm<br />
Inserción: Inserci n: 3cm<br />
Fuerza= 8.71*10.82/3 = 31.41New
Trabajo, C<strong>al</strong>orías C<strong>al</strong>or as y vatios<br />
T= 31.41*0.272= 8.54 joul<br />
8.54 joul / 4.184= 2.04 c<strong>al</strong>orías c<strong>al</strong>or as<br />
8.54 joul / 0.625 = 13.66 vatios
Conclusiones<br />
Las fotos <strong>en</strong> g<strong>en</strong>er<strong>al</strong> sólo s lo mostraron un<br />
movimi<strong>en</strong>to del brazo; así, as , el resto del cuerpo es<br />
la base sólida s lida (quieta) para desarrollar un<br />
<strong>lanzami<strong>en</strong>to</strong> de hammer. hammer.<br />
El movimi<strong>en</strong>to <strong>al</strong>canzó <strong>al</strong>canz una aceleración aceleraci n de<br />
240cm/seg 2 , evid<strong>en</strong>ciando la pot<strong>en</strong>cia que debe<br />
poseer el tríceps tr ceps como músculo m sculo princip<strong>al</strong> <strong>en</strong><br />
este <strong>lanzami<strong>en</strong>to</strong>.
Conclusiones<br />
El fotograma mostró mostr que el frisbee s<strong>al</strong>e a los<br />
127º 127 con respecto a la perp<strong>en</strong>dicular del<br />
hombro, garantizando así as un desplazami<strong>en</strong>to<br />
horizont<strong>al</strong> del frisbee para sost<strong>en</strong>erse <strong>en</strong> el aire.<br />
Así As también tambi n se puede evid<strong>en</strong>ciar <strong>en</strong> la foto la<br />
importancia de la función funci n que el dedo medio e<br />
índice, ndice, cumpl<strong>en</strong> como soporte <strong>al</strong> inicio y como<br />
guía gu a <strong>al</strong> fin<strong>al</strong>, para el objetivo de llegada del<br />
frisbee. frisbee.
Recom<strong>en</strong>daciones<br />
Se debe usar poca ropa, para establecer con<br />
exactitud los accid<strong>en</strong>tes óseos; seos; así, as , se ubicarán ubicar n<br />
mejor las líneas l neas medias del cuerpo.<br />
A la hora de tomar el fotograma se t<strong>en</strong>drá t<strong>en</strong>dr <strong>en</strong><br />
cu<strong>en</strong>ta el “éxito “éxito”<br />
del <strong>lanzami<strong>en</strong>to</strong>, mirando la<br />
distancia recorrida, la dirección direcci n y el tiempo de<br />
vuelo del frisbee; frisbee;<br />
así as se asegurará asegurar el análisis an lisis de<br />
un bu<strong>en</strong> <strong>lanzami<strong>en</strong>to</strong>.
BIBLIOGRAFÍA<br />
Acero Jáuregui, José Alcides. La biomecánica <strong>en</strong> el proceso de análisis y optimización de las técnicas<br />
deportivas : confer<strong>en</strong>cia introductoria. Maracaibo, V<strong>en</strong>ezuela. 1992.<br />
Acero Jáuregui, José Alcides. Bases biomecánicas para la actividad física y deportiva. C<strong>al</strong>i: Universidad de<br />
Pamplona. 2002.<br />
Aguado Jodar, Xavier. Eficacia y técnica deportiva : análisis del movimi<strong>en</strong>to humano. España: Inde<br />
Publicaciones. 1993.<br />
Baumler, Gunter y Schneider, Klaus. Biomecánica deportiva. España: Ediciones Martínez Roca. 1989.<br />
Congreso Ci<strong>en</strong>tífico Olímpico. Biomecánica y cineantropometría. España: Instituto And<strong>al</strong>uz del Deporte. 1992.<br />
Fucci, Sergio y B<strong>en</strong>igni, Mario. Biomecánica del aparato locomotor aplicada <strong>al</strong> acondicionami<strong>en</strong>to muscular.<br />
España: Doyma. 1991<br />
Grosser, Manfred y Hermann, Heike. El movimi<strong>en</strong>to deportivo : bases anatómicas y biomecánicas. España:<br />
Ediciones Martínez Roca. 1991.<br />
Hainaut, Kart. Introducción a la biomecánica. Barcelona: Jims. 1976.<br />
Hochmuth, Gerhard. Biomecánica de los movimi<strong>en</strong>tos deportivos. Madrid: Instituto Nacion<strong>al</strong> de Educación<br />
Física de Madrid. 1973.<br />
M<strong>al</strong>agón de García, Cecilia. Manu<strong>al</strong> de antropometria. Arm<strong>en</strong>ia: Editori<strong>al</strong> Kinesis. 2004.<br />
Plas, F. y Viel, E. and others. La marcha humana: cinesiología dinámica, biomecánica y patomecánica.<br />
España: Masson. 1984<br />
Ramón Suarez, Gustavo. <strong>Análisis</strong> de factores <strong>biomecánico</strong>s y comportam<strong>en</strong>t<strong>al</strong>es relacionados con la<br />
efectividad del Uchi mata, ejecutado por judokas de <strong>al</strong>to r<strong>en</strong>dimi<strong>en</strong>to. España: 2002.<br />
Utkin, V. L. Aspectos <strong>biomecánico</strong>s de la táctica deportiva. Moscú: Vneshtorgizdat. 1986.<br />
Zatsiorski, V. y Donskoi, D. Biomecánica de los ejercicios físicos : manu<strong>al</strong>. Cuba: Editori<strong>al</strong> Pueblo y<br />
Educación. 1990.