Fuxx Control - ARS 2320 / ARS 2340 Instruction Manual - Kuhnke
Fuxx Control - ARS 2320 / ARS 2340 Instruction Manual - Kuhnke
Fuxx Control - ARS 2320 / ARS 2340 Instruction Manual - Kuhnke

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Fuxx</strong> <strong>Control</strong> <strong>ARS</strong> <strong>2320</strong> / <strong>ARS</strong> <strong>2340</strong> KUHNKE Automation<br />
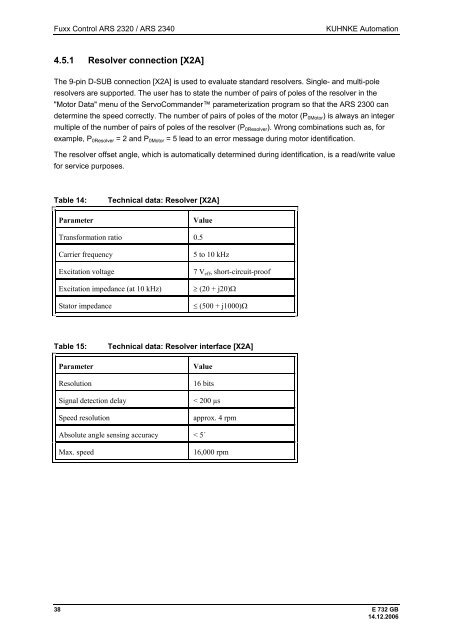
4.5.1 Resolver connection [X2A]<br />
The 9-pin D-SUB connection [X2A] is used to evaluate standard resolvers. Single- and multi-pole<br />
resolvers are supported. The user has to state the number of pairs of poles of the resolver in the<br />
"Motor Data" menu of the ServoCommander parameterization program so that the <strong>ARS</strong> 2300 can<br />
determine the speed correctly. The number of pairs of poles of the motor (P0Motor) is always an integer<br />
multiple of the number of pairs of poles of the resolver (P0Resolver). Wrong combinations such as, for<br />
example, P0Resolver = 2 and P0Motor = 5 lead to an error message during motor identification.<br />
The resolver offset angle, which is automatically determined during identification, is a read/write value<br />
for service purposes.<br />
Table 14: Technical data: Resolver [X2A]<br />
Parameter Value<br />
Transformation ratio 0.5<br />
Carrier frequency 5 to 10 kHz<br />
Excitation voltage 7 Veff, short-circuit-proof<br />
Excitation impedance (at 10 kHz) ≥ (20 + j20)Ω<br />
Stator impedance ≤ (500 + j1000)Ω<br />
Table 15: Technical data: Resolver interface [X2A]<br />
Parameter Value<br />
Resolution 16 bits<br />
Signal detection delay < 200 µs<br />
Speed resolution approx. 4 rpm<br />
Absolute angle sensing accuracy < 5´<br />
Max. speed 16,000 rpm<br />
38 E 732 GB<br />
14.12.2006