Design of an Automatic Control Algorithm for Energy-Efficient ...
Design of an Automatic Control Algorithm for Energy-Efficient ...
Design of an Automatic Control Algorithm for Energy-Efficient ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
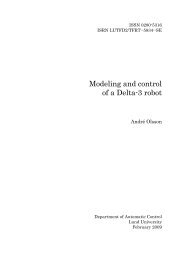
4 <strong>Control</strong> strategy 40<br />
Table 4.1: Influence matrix <strong>of</strong> the controllable parameters <strong>an</strong>d the control objectives.<br />
Inlet air parameters � �� �� ������ � ���� � ������ � � ����� ��� ����<br />
Fogging affinity ¤ ¤ ¤ £ ¤<br />
Thermal com<strong>for</strong>t ¤ ¤ ¤ £ ¤<br />
Humidity com<strong>for</strong>t ¤ ¤ ¤ £ £<br />
Air quality £ ¤ £ ¤ £<br />
Air speed com<strong>for</strong>t ¤ ¤ £ £ ¤<br />
<strong>Energy</strong> consumption ¤ ¤ ¤ ¤ £<br />
¤: has direct influence on the objective<br />
£: has no direct influence on the objective<br />
between them has to be found. It c<strong>an</strong> be seen in Table 4.1 that it is not possible to control<br />
one independently <strong>of</strong> the others. In common climate control systems this is <strong>of</strong>ten solved<br />
by ignoring all objectives except the one most import<strong>an</strong>t at the moment (or not regarding<br />
some at all). While this leads to easier controllers it affects the overall per<strong>for</strong>m<strong>an</strong>ce since<br />
only one objective is (mainly) regarded at a time. In order to achieve the best per<strong>for</strong>m<strong>an</strong>ce<br />
<strong>an</strong> integral solution is needed.<br />
A quite import<strong>an</strong>t difference to usual automatic control problems is that it is not<br />
precision that is most import<strong>an</strong>t. Correct decisions have to be taken dependent on m<strong>an</strong>y<br />
inputs. Due to thermal resist<strong>an</strong>ces <strong>an</strong>d storage, time requirements are also comparably<br />
low (cf. Section 3.1.5).<br />
The solution presented here consists <strong>of</strong> <strong>an</strong> estimator generating required values that<br />
are not directly measured to improve the quality <strong>of</strong> the model predictions. The outer loop<br />
controller is <strong>an</strong> optimiser, trying to find the best compromise between the objectives under<br />
given conditions. The third component uses the given optimised set-point to control the<br />
HVAC-unit f<strong>an</strong>, heater <strong>an</strong>d cooler. A simplified scheme <strong>of</strong> this concept is shown in Figure<br />
4.1.<br />
The downsides are that it is computationally expensive, mainly because <strong>of</strong> the<br />
optimiser. On the other h<strong>an</strong>d, computational power gets cheaper very quickly. The<br />
flexibility is <strong>an</strong> adv<strong>an</strong>tage: Objectives c<strong>an</strong> be added without much trouble because <strong>of</strong> a<br />
model-based <strong>an</strong>d modular design. Compared to a separate controller <strong>for</strong> each objective,<br />
the results <strong>of</strong> which are blended, it allows smooth tr<strong>an</strong>sitions without a lot <strong>of</strong> tuning.<br />
Adv<strong>an</strong>tages over a fuzzy-logic are the flexibility <strong>an</strong>d the model instead <strong>of</strong> the experience-