Application Compendium - Agilent Technologies
Application Compendium - Agilent Technologies
Application Compendium - Agilent Technologies

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
A B<br />
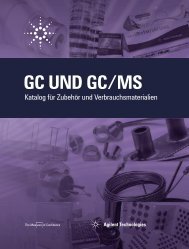
Figure 5A-C. The topography (A) and surface potential (B) images of SRAM. The cross-section profiles along<br />
the directions indicated with white arrows in (A) and (B) are shown in the top and bottom parts of (C).<br />
at velec=10 kHz by optimizing servo gain<br />
parameters. The experimental protocol<br />
for KFM also includes a compensation<br />
of the occasional contribution to surface<br />
potential measurements from the probe<br />
and sample surroundings; which causes<br />
a dependence of surface potential on<br />
the probe-sample separation. This<br />
dependence is eliminated by finding the<br />
proper offset voltage. The optimization<br />
procedures for KFM measurements<br />
are described in more detail in 27 .<br />
In the single-pass KFM experiment<br />
one needs to select vmech and velec. A<br />
mechanical drive of the probe is typically<br />
done at vmech chosen near the first<br />
flexural resonance of the cantilever,<br />
whereas the electric servo loop is set<br />
either at much lower frequency or at<br />
the second or even third flexural mode.<br />
The following arguments are usually<br />
considered in the choice of velec. The<br />
electrostatic probe response is higher at<br />
the resonant frequencies, yet this also<br />
increases the possibility the cross-talk<br />
between different force interactions. The<br />
cross-talk is less probable when velec