Monocular Autonomously- Controlled Snowplow - EEWeb
Monocular Autonomously- Controlled Snowplow - EEWeb
Monocular Autonomously- Controlled Snowplow - EEWeb

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>EEWeb</strong><br />
PULSE<br />
Ohio University<br />
<strong>EEWeb</strong>.com<br />
Issue 53<br />
July 3, 2012<br />
Electrical Engineering Community
TABLE OF CONTENTS<br />
Frank van Graas, Maarten Uijt de Haag,<br />
and Wouter Pelgrum 4<br />
OHIO UNIVERSITY<br />
Interview with Frank van Graas, Maarten Uijt de Haag, and Wouter Pelgrum - Professors in the School<br />
of Electrical Engineering and Computer Science, Researchers with the Avionics Engineering Center<br />
<strong>Monocular</strong> <strong>Autonomously</strong>-<strong>Controlled</strong> 13<br />
<strong>Snowplow</strong><br />
BY SAMANTHA CRAIG, MATTHEW MILTNER, DEREK FULK,<br />
WOUTER PELGRUM, AND FRANK VAN GRAAS<br />
Ohio University’s submission to the Annual Autonomous <strong>Snowplow</strong> Competition.<br />
Featured Products 18<br />
New ARM Cortex Microcontrollers<br />
Redefine Flexibility for Embedded Designs<br />
BY SHAHRAM TADAYON WITH SILICON LABS<br />
A solution for emebedded developers that enable them to respond quickly and easily to customer<br />
and market demands, last-minute design changes and competitive challenges.<br />
State Machine Heretic 25<br />
BY DAVE VANDENBOUT WITH XESS CORP.<br />
An overview of one and two-process state machines and their project applications.<br />
20<br />
RTZ - Return to Zero Comic 29<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 3<br />
TABLE OF CONTENTS
INTERVIEW<br />
Ohio<br />
University<br />
Frank<br />
van Graas<br />
(rear), Maarten Uijt<br />
de Haag (front right),<br />
Wouter Pelgrum (front left) -<br />
Professors in the School of Electrical<br />
Engineering and Computer Science,<br />
Researchers with the Avionics Engineering Center<br />
Frank van Graas,<br />
Maarten Uijt de Haag,<br />
and Wouter Pelgrum<br />
How did you get into<br />
electronics/ engineering and<br />
when did you start?<br />
Frank: I built my first circuit when<br />
I was approximately 5 years old. It<br />
consisted of a 4.5-V battery, a switch<br />
and a light bulb. From that time on, I<br />
wanted to learn as much as I could<br />
about electronics, and by the time<br />
I was twelve years old, I already<br />
planned to get an advanced degree<br />
in electrical engineering.<br />
Maarten: Early on in high-school I<br />
became fascinated with electronics<br />
and spent a significant amount of<br />
time “playing” with commercially<br />
available electronics circuit kits.<br />
After that I moved on to building<br />
electronics-based alarm systems for<br />
my room and small robots that could<br />
move freely through our house.<br />
An even though I contemplated<br />
going in aeronautical engineering I<br />
decided in the end to get a degree<br />
in Electrical Engineering.<br />
Wouter: I have been always<br />
interested in engineering, especially<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 4<br />
FEATURED INTERVIEW
INTERVIEW<br />
electrical engineering. As a little<br />
kid I wired AC light bulbs before I<br />
could read, invested all my money<br />
on Lego and spent countless hours<br />
building elaborate constructions.<br />
In high school I got myself into a<br />
wide range of activities, such as<br />
audio engineering, special effects,<br />
video productions, and wireless<br />
communications.<br />
How did you arrive at Ohio<br />
University?<br />
Frank: I was studying at Delft<br />
University of Technology in the<br />
Netherlands, finishing up the<br />
“engineers” degree. GPS had<br />
become one of my research<br />
interests, but it was difficult to find<br />
information about GPS in Europe.<br />
Through Delft University, I found out<br />
that Ohio University had an active<br />
differential GPS program with<br />
NASA to land helicopters. It turned<br />
out that one of my professors, Gerrit<br />
de Jong, knew a professor at Ohio<br />
University, Kent Chamberlin, from<br />
an electromagnetics conference in<br />
Spain. I contacted prof. Chamberlin<br />
and asked if I could come to visit<br />
for a few months. That all worked<br />
out and within 2 weeks I was<br />
working on the NASA program.<br />
When it was time for me to return<br />
to Delft University, I was offered a<br />
research associate position at Ohio<br />
and ended up finishing my Ph.D.<br />
there instead of at Delft University.<br />
Shortly before I graduated, a faculty<br />
position in Avionics opened up at<br />
Ohio. I couldn’t imagine a better<br />
position, so I applied and joined the<br />
faculty in 1988.<br />
Maarten: While I was studying at<br />
Delft University of Technology in<br />
the Netherlands, I met Dr. Michael<br />
Braasch from Ohio University and<br />
a former student of Dr. Frank van<br />
Graas. He was part of an exchange<br />
program between Ohio University<br />
and Deft University of Technology.<br />
I worked with him on Global<br />
Positioning System (GPS) related<br />
work for my M.S.E.E. and he served<br />
on my thesis committee. After<br />
finishing up my degree at Delft, I<br />
got a scholarship to go abroad and<br />
work for 6 months. I contacted Ohio<br />
University and went over there for 6<br />
months. At Ohio University I met Dr.<br />
Frank van Graas and he offered me<br />
a job as a research engineer with<br />
the Ohio University Avionics<br />
To me all phases of a<br />
project are exciting,<br />
starting with the<br />
concept, design and<br />
implementation to the<br />
operational testing and<br />
data analyses. - Frank<br />
Engineering center. Besides my<br />
regular job I did some substitute<br />
teaching for Frank and when he<br />
asked me if I wanted to get my Ph.D.<br />
I was excited. After finishing up my<br />
Ph.D. I became a visiting professor<br />
in 1999 and when a permanent<br />
position opened up in Electrical<br />
Engineering and Computer<br />
Science, I applied and got the job<br />
in 2000.<br />
Wouter: When I did my Masters at<br />
Delft University, Professor Durk van<br />
Willigen came back from retirement<br />
to be my advisor for my thesis on<br />
H-field antennas for Low-Frequency<br />
radionavigation systems. This work<br />
got me in contact with the navigation<br />
community, and also with the people<br />
from the Avionics Engineering<br />
Center at Ohio University, Frank<br />
van Graas especially. In 2005 Frank<br />
arranged for me to spend 6 months in<br />
Ohio, primarily to focus on finishing<br />
my Ph.D. dissertation. In 2006, just<br />
before finishing my Ph.D., I started<br />
my own company specializing on<br />
radionavigation and did a variety of<br />
projects for Ohio University. When a<br />
faculty position opened up at Ohio<br />
University in 2008 I applied and got<br />
the job, which I started in 2009.<br />
Can you tell us about your<br />
work experience/ history<br />
before arriving at Ohio<br />
University?<br />
Frank: During my student years, I<br />
was always working on challenging<br />
electronics projects, such as a<br />
telephone system that connected<br />
4 telephones to the same line<br />
and automatically kept track of<br />
the charges for each individual<br />
telephone, audio systems, power<br />
supplies, and sensitive magnetic<br />
field sensors.<br />
Maarten: During my student<br />
years, I worked on a variety of<br />
electronics project including the<br />
telephone distribution system at<br />
my fraternity. Also, I did some work<br />
as a software engineer at a small<br />
(15 people) chemical engineering<br />
company where I end up running<br />
the software department for a<br />
year. At Delft university I was<br />
furthermore a teaching assistant in<br />
the communications labs.<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 5<br />
FEATURED INTERVIEW
INTERVIEW<br />
Wouter: When still in college I<br />
started a company that provided live<br />
video coverage of rowing races. We<br />
borrowed equipment from pretty<br />
much every electrical engineering<br />
research group of the university,<br />
ranging from high-end video<br />
cameras to experimental fiber optic<br />
video communication systems. That<br />
combined with home-brew wireless<br />
video and audio links, computer<br />
systems, and countless custombuild<br />
solutions we were able to<br />
provide a professional product at<br />
very low cost. Projects like these<br />
taught me to be creative, have<br />
risk-mitigation strategies for every<br />
conceivable situation in place,<br />
and, most importantly, to build an<br />
enthusiastic team of people to get<br />
the job done and to have fun while<br />
doing it.<br />
Next to my video production<br />
activities, I also jumped into Linux,<br />
and build a massive storage and<br />
content delivery system consisting<br />
of a robust cluster of dozens of<br />
unreliable network servers. Now, a<br />
decade later, I still apply the lessons<br />
learned from that project to every<br />
data collection we conduct.<br />
During most of my Ph.D. studies I<br />
worked for Reelektronika, a small<br />
company in the Netherlands.<br />
Although work and studies were on<br />
the same topic, it proved to be a great<br />
challenge to balance the short-term<br />
pressure from the company with<br />
the long-term goals of a Ph.D. At<br />
Reelektronika I worked on eLoran,<br />
a Low-Frequency radionavigation<br />
system, on the H-field antenna,<br />
receiver algorithms, receiver design<br />
and implementation, measurement<br />
campaigns, and data analysis.<br />
In 2006 I started my own company,<br />
consulting in radionavigationrelated<br />
areas.<br />
What have been some of your<br />
influences that have helped<br />
you get to where you are<br />
today?<br />
Frank: My father was a major<br />
influence on my career; he would<br />
occasionally help me with troubleshooting<br />
my projects, which helped<br />
me to realize that there aren’t always<br />
quick fixes or easy answers. He<br />
would build everything from scratch,<br />
including all his measurement<br />
instrumentation. Growing up, we<br />
were the first in our neighborhood<br />
with a black and white television<br />
because he built it himself. The<br />
drawback was that we were the<br />
last to switch to a color TV, since<br />
he always managed to fix his black<br />
and white product, no matter what<br />
went wrong. From that experience,<br />
I learned that it is important to know<br />
all the details of a project.<br />
Maarten: Even though my parents<br />
were no engineers, they very<br />
much encouraged my interests in<br />
electronic systems and aeronautics<br />
during my high-school years. When<br />
I got to college and started working<br />
on my M.S.E.E. my advisor, Dr.<br />
Durk van Willigen really stimulated<br />
my interests in electronics for<br />
aircraft (avionics). After my move<br />
to Ohio University Frank van Graas<br />
took over that role and also got me<br />
interested the teaching and student<br />
advising which made me decide to<br />
go into academia.<br />
Wouter: My parents always greatly<br />
supported and encouraged my<br />
interests in science and engineering.<br />
In college it was my M.S.E.E. and<br />
Ph.D. advisor Dr. Durk van Willigen<br />
who got me excited about the area<br />
of radionavigation and Dr. Frank van<br />
Graas who brought me in contact<br />
with Ohio University and has<br />
mentored me here in the US.<br />
Do you have any tricks up<br />
your sleeve?<br />
Frank: Learn all the basic concepts<br />
in math, physics and electrical<br />
engineering. Sooner or later, you’ll<br />
need them all in your career to solve<br />
a variety of problems. After a while,<br />
you’ll recognize the parallels and<br />
that it all connects to the same basic<br />
concepts.<br />
Maarten: Try to express your<br />
complex engineering problems in<br />
terms of basic concepts of electrical<br />
engineering. Furthermore, always<br />
ask yourself what you want to<br />
achieve with your electronics<br />
system, what you are going to use it<br />
for, and who is going to use it.<br />
Wouter: Prepare for everything,<br />
whatever can go wrong will go<br />
wrong at some point, no matter<br />
whether you are programming a<br />
software algorithm or are involved<br />
in the field-testing of a complex<br />
system. And then, typically, when<br />
you are fully prepared for every<br />
conceivable scenario and have<br />
backups for everything, you won’t<br />
need any of your backups because<br />
your system will just work…<br />
What has been your favorite<br />
project?<br />
Frank: I have several favorite<br />
projects, but it hard to top the project<br />
we did for FAA in 1994, when we<br />
leased an empty Boeing 757 over<br />
the weekend from the United Parcel<br />
Service in Louisville, KY, loaded it<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 6<br />
FEATURED INTERVIEW
INTERVIEW<br />
up with two first-class chairs and<br />
a rack with electronics, hacked<br />
into the 757 autopilot to make it fly<br />
our GPS guidance instead of its<br />
trusted triple-redundant Instrument<br />
Landing System, flew to FAA’s test<br />
site at Atlantic City Airport, NJ,<br />
executed 50 automatic landings<br />
in a row, flew back to Louisville<br />
and unbolted the equipment while<br />
taxiing to the gate so that we could<br />
turn the aircraft back over to UPS<br />
to reconfigure and recertify the<br />
aircraft for overnight package<br />
delivery. This project was part of<br />
an FAA demonstration program to<br />
show that GPS can be used to land<br />
airplanes.<br />
Maarten: My favorite project was<br />
the design, implementation and<br />
flight test of a navigation system that<br />
uses on one or more airborne laser<br />
scanning systems (as are currently<br />
being used to build maps of large<br />
portions of the US). We first flew<br />
this system and a data collection<br />
onboard a NASA DC-8 at Dryden<br />
Research Center at Edwards Air<br />
Force base and Reno, NV. Next,<br />
we designed and installed a<br />
smaller, less expensive system on<br />
our DC-3 and performed various<br />
approaches to an airport in West<br />
Virginia while providing the pilot<br />
with the necessary guidance on an<br />
LCD display. This project was I part<br />
sponsored by NASA, the Air Force<br />
Research Laboratory and Northrop-<br />
Grumman.<br />
Wouter: I have been involved<br />
with many exciting projects. The<br />
most fulfilling moments are those<br />
when a team-effort leads to a great<br />
result. For example with my video<br />
productions where I had a team of<br />
great people making an excellent<br />
product. The technology had been<br />
painstakingly prepared and worked<br />
flawlessly, but the greatest joy is<br />
Prepare for<br />
everything, whatever<br />
can go wrong will go<br />
wrong at some point,<br />
no matter whether<br />
you are programming<br />
a software algorithm<br />
or are involved in<br />
the field-testing of<br />
a complex system.<br />
And then, typically,<br />
when you are fully<br />
prepared for every<br />
conceivable scenario<br />
and have backups<br />
for everything, you<br />
won’t need any of<br />
your backups because<br />
your system will just<br />
work… - Wouter<br />
to share that fulfillment with your<br />
team. Similarly for the snowplow<br />
competition, where we all worked<br />
to the maximum of our abilities to<br />
achieve an optimal result. It is a<br />
great pleasure to see the students<br />
grow throughout those projects<br />
and from project to project and see<br />
them become successful in their<br />
discipline.<br />
Will you tell us about some of<br />
the projects you have worked<br />
on in the past?<br />
Frank: Past projects have ranged<br />
from automatic GPS landing<br />
systems for airplanes and<br />
helicopters, to using GPS for aircraft<br />
attitude and heading determination<br />
by mounting multiple antennas on<br />
the airplane, GPS receiver design,<br />
precision GPS navigation projects<br />
for aircraft and ground vehicles and<br />
integration of GPS with numerous<br />
other navigation sensors.<br />
Maarten: I have worked on a<br />
large variety of projects ranging<br />
from integrity monitors for terrain<br />
databases used on flight displays on<br />
the flight deck (so-called synthetic<br />
vision displays), automatic GPS<br />
landing systems for airplanes, GPS<br />
receiver design, laser-based and<br />
camera-based navigation systems<br />
for aircraft, unmanned ground<br />
vehicles and unmanned aerial<br />
vehicles, alerting and notification<br />
systems for commercial aircraft<br />
including collision avoidance<br />
systems using GPS, and integrated<br />
system build around inertial sensors<br />
(accelerometers and gyroscopes).<br />
Wouter: Since I joined Ohio<br />
University I have worked on a wide<br />
variety of projects. We have built a<br />
GPS/Inertial/Rubidium integrated<br />
positioning, velocity, attitude, and<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 7<br />
FEATURED INTERVIEW
INTERVIEW<br />
time truth system that is now used<br />
on almost all our tests. I have<br />
consulted NAVTEQ on streamlining<br />
their process from data collection,<br />
optimal processing algorithms, to<br />
map generation. We installed and<br />
operate GPS ionosphere monitoring<br />
systems in Alaska, Puerto Rico,<br />
and Singapore, which has already<br />
provided some very interesting<br />
data and subsequent publications.<br />
I have optimized H-field antennas<br />
for sub-terrain positioning. And we<br />
just completed the data delivery<br />
of a massive data collection effort<br />
for DARPA where we equipped a<br />
van with 36 and our DC3 with 24<br />
different navigation sensors.<br />
What was your role in the<br />
projects?<br />
Frank: For these projects, I was the<br />
Principal Investigator, but I also<br />
participated in writing the software,<br />
soldering circuits, trouble-shooting<br />
the hardware and digging holes to<br />
plant antennas in the field.<br />
Maarten: For most of these projects,<br />
I was the Principal Investigator; on<br />
others I was a research engineer.<br />
In all cases I actively participated<br />
in the projects and had to write<br />
software and put hardware together.<br />
Wouter: On some projects I have<br />
been the (Co) Principal Investigator,<br />
on others researcher. My role<br />
within these projects ranges from<br />
analytical research to soldering<br />
circuits, from project management<br />
to software programming, and<br />
typically all of the above in the same<br />
project.<br />
What was your favorite part of<br />
the project?<br />
Frank: To me all phases of a<br />
project are exciting, starting<br />
with the concept, design and<br />
implementation to the operational<br />
testing and data analyses.<br />
Maarten: Besides the fact that we<br />
would look at the problem all the<br />
way from concept through design<br />
to implementation and testing of<br />
the systems, I really do enjoy the<br />
interaction with my students. Seeing<br />
them learn and become more<br />
mature engineers is a delight to see!<br />
Wouter: It is fantastic if a complex<br />
project comes together, when<br />
it actually works after many late<br />
nights, and when you have a great<br />
team to share your success with.<br />
Where was the technology<br />
used?<br />
Frank: Most of our projects use<br />
computers, microcontrollers, Field-<br />
Programmable Gate Arrays (FPGA),<br />
analog to digital converters, radio<br />
frequency front-ends and antennas.<br />
Maarten: Our projects used<br />
a large number of electronics<br />
components including computers,<br />
RF transmitters and receivers,<br />
measuring equipment such as<br />
oscilloscopes, spectrum and<br />
network analyzers, microcontrollers,<br />
FPGAs, but also laser scanners,<br />
cameras, and a large number of<br />
actual avionics systems (inertial<br />
navigation systems, air data<br />
computers, weather radar, radio<br />
altimeters, GPS receivers, etc.).<br />
Wouter: We use a wide range of<br />
equipment. Computers, micro<br />
controllers, FPGAs, RF antennas,<br />
filters, amplifiers, mixers, custom<br />
and commercial RF data collection<br />
setups, signal generators, spectrum<br />
analyzers, oscilloscopes, 1-way and<br />
2-way communication equipment,<br />
inertial sensors, cameras, laser, IR,<br />
GPS, etc.<br />
What were the challenges/<br />
successes of the project?<br />
Frank: For me, the biggest challenge<br />
of a research project is the planning<br />
and making sure the project is<br />
completed before the funding runs<br />
out. It is difficult to predict when<br />
the right solutions are invented for<br />
a particular problem. Nevertheless,<br />
based on first principles from math<br />
and physics, the feasibility of a<br />
particular approach can usually be<br />
determined. Somehow, everything<br />
always seems to come together at<br />
the last minute.<br />
Maarten: The biggest challenge<br />
for me was the planning and<br />
coordination of the work given<br />
the time frame, available funding,<br />
available students and engineers<br />
and collaborators at other institutions<br />
an din industry. Especially, the<br />
latter required a considerable<br />
effort in keeping everybody on<br />
the same page and getting the job<br />
done. In terms of actually solving<br />
the problem, we are always very<br />
successful in coming up with an<br />
elegant solution that makes sense<br />
for the problem. A key to the<br />
successes has always been to find<br />
good students and carefully train<br />
and motivate them so they could<br />
be very productive on the research<br />
projects.<br />
Wouter: The biggest challenge<br />
is getting everything done in time<br />
and within budget while balancing<br />
time and energy among multiple<br />
projects.<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 8<br />
FEATURED INTERVIEW
INTERVIEW<br />
Do you have any note-worthy<br />
engineering experiences?<br />
Frank: I have been fortunate to work<br />
on GPS since the early days with<br />
plenty of “low-hanging” fruit, which<br />
resulted in the Johannes Kepler<br />
Award for “sustained and significant<br />
contributions to satellite navigation,”<br />
from the Satellite Division of The<br />
Institute of Navigation, the Colonel<br />
Thomas L. Thurlow Award for<br />
“outstanding contribution to the<br />
science of navigation,” from The<br />
Institute of Navigation and the<br />
John Ruth Avionics Award for<br />
“outstanding lifetime achievement<br />
in the area of GPS navigation,”<br />
from the American Institute of<br />
Aeronautics and Astronautics.<br />
Maarten: For my work on synthetic<br />
visions systems and my laser-based<br />
navigation work, I did receive the<br />
Institute of Navigation, the Colonel<br />
Thomas L. Thurlow Award for<br />
“outstanding contribution to the<br />
science of navigation.” My work in<br />
these “new” areas of engineering<br />
allowed me to do some really<br />
innovating research.<br />
Will you tell us about the<br />
autonomous snow plow<br />
competition and winning the<br />
competition for the second<br />
year in a row<br />
Frank: For any competition, testing<br />
is the key to success. For the first<br />
competition, we were testing<br />
through the night in the basement<br />
parking lot of our hotel up until a<br />
few hours before the competition.<br />
This year, we realized that lack<br />
of snowfall was going to limit our<br />
testing in Ohio, so we contacted Dan<br />
Morris, director of Ohio University’s<br />
Bird Ice Arena and he generously<br />
provided us with snow by scraping<br />
the ice with his zamboni. We then<br />
trucked the snow to our test area.<br />
Sometimes, half of the snow melted<br />
before we were able to plow it.<br />
When we arrived in St. Paul, MN, for<br />
the competition, there was no snow<br />
either. The competition organizers<br />
also turned to local ice rinks to<br />
provide snow for the competition.<br />
Maarten: Having a solid and welltested<br />
design with a very good<br />
user-interface that allowed for<br />
easy implementations of new robot<br />
strategies, really made the road<br />
to this competition much easier.<br />
Especially, Dr. Wouter Pelgum<br />
with the help of the students was<br />
instrumental to this design. This<br />
made testing much easier and as<br />
such we were actually ready to go<br />
before we went to the competition<br />
instead of having to work late hours<br />
at the competition.<br />
Wouter: When we competed the first<br />
time we pretty much build the robot<br />
from the ground up which was an<br />
enormous effort. The first moment<br />
when we were ready to close the<br />
control loop was the night before<br />
the competition. We confiscated an<br />
underground parking garage and<br />
worked through the night to fix the<br />
final bugs and tune the controls.<br />
For the second competition we were<br />
in much better shape since we had a<br />
good robot to start with, but we also<br />
decided to set our goals significantly<br />
higher this time. Our robot M.A.C.S.<br />
had to be much faster (up to 2 m/s),<br />
more precise (cm-level total system<br />
error), heavier, and more powerful.<br />
This required us to rebuild most of<br />
the mechanics, replace the motors,<br />
the motor controllers, and optimize<br />
the software. Furthermore, we spent<br />
countless hours testing. To test<br />
the impact of snow loading on the<br />
controls we extensively tested with<br />
different amounts of snow, plow<br />
widths, and plow speeds<br />
Ohio University<br />
continues to be a<br />
leader in avionics<br />
engineering because of<br />
our faculty and staff,<br />
our good relationships<br />
with our sponsors, and<br />
the fantastic fleet of<br />
aircraft (and airport<br />
to go with it) that we<br />
have to evaluate our<br />
new technologies.<br />
This gives us a unique<br />
edge and insight in<br />
what it takes to get a<br />
system on an actual<br />
aircraft. - Maarten<br />
while monitoring the robot’s<br />
telemetry. Prior to the competition<br />
we replicated the entire competition<br />
field using snow we trucked in<br />
from the Ohio University’s Bird Ice<br />
Arena. This provided us with the<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 9<br />
FEATURED INTERVIEW
INTERVIEW<br />
most realistic testing environment,<br />
leaving nothing to chance at the<br />
competition. All and all this got us<br />
A highly educated<br />
workforce is essential<br />
to stay on top of the<br />
ever-increasing stateof-the-art<br />
technology,<br />
and to remain<br />
competitive in a global<br />
market. We need to<br />
stay focused on quality<br />
education at the high<br />
school level, combined<br />
with creating a<br />
healthy interest in<br />
mathematics and<br />
science, followed<br />
by excellent but<br />
affordable higher<br />
education that<br />
matches the student’s<br />
capacities. - Wouter<br />
in the slightly bizarre situation that<br />
we didn’t have to change a single<br />
line of code during the competition,<br />
nothing to repair, everything just<br />
worked, leaving us with enough<br />
time to help out the other teams and<br />
to jump around in our obnoxious<br />
yellow suits to entertain the<br />
audience.<br />
What are you currently<br />
working on?<br />
Frank: I’m working on a variety<br />
of research programs ranging<br />
from improved atomic frequency<br />
references, GPS-based aircraft<br />
landing systems, camera-based<br />
navigation, ionospheric studies to<br />
navigation in space.<br />
Maarten: I’m working on a variety<br />
of research programs including<br />
alerting systems for commercial<br />
aircraft including GPS-based<br />
surveillance and collision<br />
avoidance, laser- and camera-based<br />
integrated navigation, advanced<br />
flight displays for the future flight<br />
deck and navigation, guidance and<br />
surveillance systems for small-size<br />
unmanned aerial systems for indoor<br />
and urban operations (search and<br />
rescue, etc.).<br />
Wouter: I am researching the<br />
possibilities of upgrading the<br />
Distance Measuring Equipment<br />
(DME) system to meet the stringent<br />
demands of next generation<br />
aviation. With this, we can provide a<br />
backup in case GPS is not available<br />
due to, for example, interference.<br />
Can you tell us more<br />
about Ohio University and<br />
the technology they are<br />
developing?<br />
Frank: Our Avionics Engineering<br />
Center provides education for<br />
the next generation of avionics<br />
engineers, improves existing<br />
systems and develops new<br />
technologies for aircraft and<br />
spacecraft navigation.<br />
Maarten: At the Ohio University<br />
Avionics Engineering Center we<br />
train the next generation avionics<br />
engineers and help improve the<br />
safety and performance of existing<br />
avionics systems, or design, develop<br />
and flight test new technologies<br />
for aircraft and unmanned aerial<br />
vehicles. Of course, our work<br />
on navigation system for ground<br />
vehicles (such as the snow plow)<br />
provides a fantastic platform for<br />
the students to get familiar with the<br />
issues and engineering problems in<br />
developing a navigation system.<br />
How does Ohio University<br />
continue to be a leader in<br />
avionics engineering?<br />
Frank: We not only develop new<br />
technologies, but we also use,<br />
maintain and upgrade the current<br />
navigation systems. Key to our<br />
leadership position is our aircraft<br />
fleet that includes a King Air<br />
C90SE, a Douglas Dakota DC-3, a<br />
L29 Delfin jet trainer, and several<br />
single-engine aircraft. Our practical<br />
knowledge of the current problems<br />
and system limitations enables us<br />
to develop new technologies that<br />
can be transitioned into the National<br />
Airspace System.<br />
Maarten: Ohio University continues<br />
to be a leader in avionics engineering<br />
because of our faculty<br />
and staff, our good relationships<br />
with our sponsors, and the fantastic<br />
fleet of aircraft (and airport to go<br />
with it) that we have to evaluate our<br />
new technologies. This gives us a<br />
unique edge and insight in what it<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 10<br />
FEATURED INTERVIEW
INTERVIEW<br />
takes to get a system on an actual<br />
aircraft.<br />
What direction do you see<br />
your business/research<br />
heading in the next few years?<br />
Frank: Aircraft are becoming<br />
more autonomous, especially<br />
with the mandated introduction of<br />
uninhabited aerial systems (UAS)<br />
into commercial airspace by Sept.<br />
30, 2015. To enable additional<br />
aircraft in the National Airspace<br />
System, the Federal Aviation<br />
Administration is pursing what is<br />
referred to as Performance-Based<br />
Navigation.<br />
Maarten: A large focus will be on<br />
the next generation airspace, air<br />
traffic management and aircraft. In<br />
the future we will see a much busier<br />
airspace with a higher density<br />
of aircraft including unmanned<br />
aerial vehicles. This will mean that<br />
we need to start coming u with<br />
improvements in a large number<br />
of areas including the areas where<br />
we focus our research efforts:<br />
navigation, surveillance and<br />
communication.<br />
What are some new<br />
technologies we can expect<br />
to see from Ohio University in<br />
the near future?<br />
Frank: We are working on a variety<br />
of navigation sensors for aircraft and<br />
UAS to increase airspace capacity<br />
and safety.<br />
Maarten: We will be putting a<br />
lot of efforts in coming up with<br />
new navigation, surveillance and<br />
communication systems and their<br />
user interfaces for the future aerial<br />
vehicles.<br />
What challenges do you<br />
foresee in our industry?<br />
Frank: The primary challenge I<br />
foresee for our industry is complexity<br />
and the challenge of preparing<br />
the next generation of engineers to<br />
excel in an environments of rapidly<br />
increasing knowledge.<br />
Maarten: One of the challenges<br />
will be to maintain the avionicsengineering<br />
work force while<br />
keeping the quality of the engineers<br />
the same or even improve it. This<br />
will require a solid training of<br />
these new engineers in the various<br />
electrical engineering programs<br />
and motivating of high-school<br />
students to pursue careers in<br />
electrical engineering.<br />
Wouter: A highly educated workforce<br />
is essential to stay on top of<br />
the ever-increasing state-of-the-art<br />
technology, and to remain competitive<br />
in a global market. We need to<br />
stay focused on quality education<br />
at the high school level, combined<br />
with creating a healthy interest in<br />
mathematics and science, followed<br />
by excellent but affordable higher<br />
education that matches the student’s<br />
capacities.<br />
What are some of your<br />
hobbies outside of work and<br />
design?<br />
Frank: My wife Janet is a performing<br />
musician; we both get up every<br />
morning and wonder how it is possible<br />
that we are getting paid for<br />
what we love to do – our jobs are<br />
our biggest hobbies. Besides our<br />
work, we enjoy Christian ministries,<br />
traveling and spending time with<br />
our family and friends.<br />
Maarten: My main hobby outside of<br />
work is music: I do play the saxophone<br />
and flute and am active in a<br />
couple of bands. Besides this hobby<br />
I love to spend time with my family<br />
(wife and daughter)!<br />
Wouter: When I’m not working I<br />
like to do sports. Southeastern Ohio<br />
is a great place to cycle, and I love<br />
to push myself to the limit on the<br />
endless county roads surrounding<br />
Athens.<br />
Is there anything that you<br />
have not accomplished yet,<br />
that you have your sights on<br />
accomplishing in the near<br />
future?<br />
Frank: My primary goal for the near<br />
future is to take two of our patented<br />
research technologies and turn<br />
them into products, the first is a<br />
laser-guided aircraft landing system<br />
and the second is a revolutionary<br />
GPS receiver design.<br />
Maarten: Professionally, I have my<br />
sights set on a couple of goals for<br />
the near-term. This first is to get my<br />
work in laser-based navigation and<br />
vision-based navigation transitioned<br />
to a small fleet of UAVs. The other is<br />
to have a real-time flight demonstration<br />
of my work on altering systems<br />
on one of our aircraft. Personally, I<br />
am looking forward to the birth of<br />
my son in August!<br />
Wouter: I am currently pursuing a<br />
grant to extend my DME work to<br />
provide a steady multi-year funding<br />
basis for further research and<br />
development. Furthermore, I hope<br />
to get tenure soon… On the longer<br />
term, I am entertaining the plan to<br />
combine my duties as a Professor<br />
with commercial activities around<br />
one or more of the advanced<br />
technologies we are developing. ■<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 11<br />
FEATURED INTERVIEW
New Encoder for the<br />
Worst Case Environments<br />
Avago Technologies new AEAT-6600<br />
Hall E� ect Magnetic Encoder delivers optimal<br />
solutions for Robotic, Industrial and Medical<br />
systems designers.<br />
• World’s highest resolution<br />
• 16-bit absolute positiion through SSI<br />
• Programmable Magnetic Rotary Encoder IC<br />
• 16-pin TSSOP package<br />
• Power down mode<br />
Avago Technologies Motion Control Products<br />
For more information and to request<br />
a free sample go to:<br />
www.avagotech.com/motioncontrol
<strong>Monocular</strong><br />
<strong>Autonomously</strong>-<br />
<strong>Controlled</strong><br />
<strong>Snowplow</strong><br />
INTRODUCTION<br />
A <strong>Monocular</strong> <strong>Autonomously</strong>-<strong>Controlled</strong><br />
<strong>Snowplow</strong> (M.A.C.S.) was<br />
designed, implemented and tested<br />
for participation in the First and<br />
Second Annual Autonomous <strong>Snowplow</strong><br />
Competitions (ASC) in St.<br />
Paul, MN in January 2011 and 2012.<br />
This competition challenges teams<br />
in the areas of guidance, navigation<br />
and control (GNC) to develop<br />
a robot that autonomously removes<br />
snow from a straight, 1-m wide “I”shaped<br />
field and a “U”-shaped, 1-m<br />
wide field that fits inside a 10-by-5 m<br />
rectangle [1].<br />
For the first competition, Ohio University<br />
assembled a team consisting<br />
of three undergraduate Electrical<br />
Engineering students (Samantha<br />
Craig, Matthew Miltner, Derek<br />
Fulk) and two faculty advisors. For<br />
the second competition, the team<br />
consisted of two undergraduate<br />
students (Samantha Craig, Ryan<br />
Kollar), two graduate students<br />
(Pengfei Duan and Kuangmin Li)<br />
Figure 1: <strong>Monocular</strong> <strong>Autonomously</strong>-<strong>Controlled</strong> <strong>Snowplow</strong> (M.A.C.S.)<br />
and three faculty advisors (Wouter<br />
Pelgrum, Frank van Graas, Maarten<br />
Uijt de Haag). An existing robot<br />
was selected as the basis for the<br />
snowplow design. This robot was<br />
designed for challenging Search<br />
and Rescue (SAR) operations and<br />
Ohio University<br />
By Samantha Craig,<br />
Matthew Miltner,<br />
Derek Fulk,<br />
Wouter Pelgrum,<br />
and Frank Van Graas<br />
features all-electric, four-wheel<br />
drive using four 1.25-hp motors with<br />
gearing and wheel encoders [2].<br />
Two RoboteQ motor controllers are<br />
used to establish constant wheel<br />
rotational velocities for each pair of<br />
left side and right side wheels.<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 13
PROJECT<br />
Gyro<br />
Figure 2: High-Level Block Diagram<br />
Path<br />
Planning<br />
USB<br />
Commanded<br />
Position<br />
Scanning<br />
Laser<br />
TCP/IP<br />
Processor<br />
SSD: 64GB<br />
Left Motor<br />
Controller &<br />
Encoders<br />
Following the implementation of<br />
the design modifications, Figure<br />
1 shows the current configuration<br />
of the robot, which was renamed<br />
to <strong>Monocular</strong> <strong>Autonomously</strong>-<strong>Controlled</strong><br />
<strong>Snowplow</strong> or M.A.C.S. to<br />
highlight its new mission.<br />
VEHICLE DESIGN<br />
USB USB<br />
Commanded<br />
Heading<br />
+<br />
Position<br />
Controller<br />
+<br />
WiFi<br />
Comm<br />
- -<br />
MACS Estimated<br />
Position<br />
Position<br />
Loop<br />
Laser<br />
Processing<br />
TCP/IP<br />
Right Motor<br />
Controller &<br />
Encoders<br />
Commanded<br />
Speed<br />
Relay<br />
Switch<br />
Figure 3: M.A.C.S. Control System Block Diagram<br />
A high-level block diagram of<br />
M.A.C.S. is provided in Figure 2. At<br />
Remote<br />
STOP<br />
Transmit<br />
Speed & Acceleration<br />
limits<br />
Hdg/Spd<br />
Controller<br />
MACS Estimated<br />
Heading<br />
Heading<br />
Loop<br />
Scanning<br />
Laser<br />
Motor Power<br />
Four 12V<br />
Batteries<br />
Left Motor<br />
Controller<br />
Right Motor<br />
Controller<br />
Heading<br />
Gyro<br />
5 Samples/s<br />
Remote<br />
STOP<br />
Receive<br />
Safety<br />
Circuitry<br />
Charging<br />
Circuitry<br />
Clean Power<br />
12V Battery<br />
Left Wheel<br />
Encoder<br />
Wheel<br />
Speed<br />
Loop<br />
Wheel<br />
Speed<br />
Loop<br />
Right Wheel<br />
Encoder<br />
100 Samples/s<br />
MACS<br />
MACS Heading<br />
the center of the block diagram is<br />
an AMD 64-bit, 2.4 GHz Dual-Core<br />
processor with a 64-GB solid state<br />
drive (to enable low-temperature<br />
operations). The processor handles<br />
all sensor interfacing and data recording.<br />
Power is divided into clean power<br />
and motor power. The clean power<br />
uses a 12-V, 31.6 Ah gel battery,<br />
while each motor uses two of these<br />
batteries in series to provide 24 V<br />
with 31.6 Ah. The safety circuitry<br />
consists of several relays that must<br />
all be active at the same time in<br />
order to enable the motor power<br />
relay switches. Separate charging<br />
circuits are implemented for each<br />
individual battery. When an external<br />
charging cable is connected to<br />
M.A.C.S., it automatically disables<br />
all motor power and proceeds to<br />
charge the batteries individually by<br />
switching several relays.<br />
To protect the processor from the<br />
environment, a box structure was<br />
created as part of the top inside<br />
layer of the robot.<br />
CONTROL SYSTEM DESIGN<br />
The control system for M.A.C.S.<br />
uses three control loops that were<br />
previously implemented and tested<br />
on Ohio University’s autonomous<br />
lawnmower [3]. The control system<br />
block diagram is shown in Figure 3.<br />
The three control loops are described<br />
below:<br />
1. Constant rotational velocity control<br />
loop using two RoboteQ<br />
motor controllers with encoder<br />
feedback from the front motors.<br />
The controllers are updated at a<br />
1000 Hz with a 100-Hz Proportional-Integral-Derivative<br />
(PID)<br />
controller.<br />
2. Heading control loop using an<br />
XSENS MTi gyro (0.1°/minute<br />
drift after calibration) at a 50-Hz<br />
update rate with latencies below<br />
10 ms. The bandwidth of this<br />
loop is approximately 10 Hz.<br />
3. Navigation control loop using a<br />
SICK LD-OEM1000 scanning<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 14<br />
E-Stop A<br />
E-Stop B<br />
External Power<br />
MACS Position<br />
FEATURED PROJECT
PROJECT<br />
laser with passive beacons at<br />
an update rate of 5 Hz to adjust<br />
for path deviations.<br />
The laser position and heading updates<br />
have a latency of 0.2 second,<br />
which is acceptable because it is<br />
corrected using the vehicle speed<br />
of up to 2 m/s, while unknown crosstrack<br />
velocities are well below a<br />
few cm/s, resulting in cross-track<br />
displacement errors of less than<br />
2 cm. In practice, the gyro stability<br />
in combination with the known,<br />
commanded speed of the robot are<br />
used to coast the position solution<br />
to compensate for the laser latency.<br />
Based on the gyroscope test results,<br />
cross-track errors are below 1 cm<br />
after 0.2 s of coasting.<br />
NAVIGATION<br />
SYSTEM DESIGN<br />
The concept for M.A.C.S. is to<br />
develop a navigation solution for<br />
dense urban environments that are<br />
likely GNSS-challenged (building<br />
blockage, severe multipath and<br />
interference). The required accuracy<br />
for the navigation solution is<br />
5 cm rms. Following a trade study<br />
that included GNSS, camera and<br />
laser solutions, the laser positioning<br />
method was selected as most<br />
effective and robust to satisfy the<br />
objectives. The additional benefit of<br />
the laser scanner is that it provides<br />
a redundant position solution that is<br />
calculated every 0.2-second time interval<br />
following the completion of a<br />
360° scan. The laser scans in increments<br />
of 0.25° with a 0.16° beam divergence,<br />
which provides essentially<br />
full coverage over the scan range.<br />
The SICK LD-OEM1000 scanning<br />
laser was selected, which operates<br />
at infrared (905 nm) with a ranging<br />
180<br />
165<br />
195<br />
150<br />
20 15 10 5 5 10 15 20 360<br />
210<br />
135<br />
225<br />
120<br />
240<br />
Figure 4: Laser returns for a 360° scan<br />
resolution of 3.9 mm. The laser is<br />
eye-safe and can be used at distances<br />
up to 250 m. Figure 4 shows<br />
an example of one 360° laser scan<br />
taken with 6 beacons and surrounding<br />
building structures.<br />
The laser is at the center of the plot<br />
in Figure 4. The display range is 20<br />
meters from center to the outer ring.<br />
The long, near-solid lines represent<br />
building structures, while the six<br />
beacons are identified by arrows.<br />
GUIDANCE SYSTEM DESIGN<br />
M.A.C.S. uses several commands<br />
that are used in a script generated<br />
to clear the snow of the field. The<br />
snow field coordinates are used<br />
to generate command set actions<br />
that are executed successively as a<br />
function of the snowplow position.<br />
The M.A.C.S. command set includes<br />
the following commands:<br />
1. Initialize<br />
2. Idle<br />
3. Stop immediately<br />
4. Track heading at a set speed<br />
(positive or negative) , a set<br />
acceleration, and a set control<br />
gain<br />
5. Turn using a commanded final<br />
heading at a set speed (for zero<br />
speed, the robot will have a zero<br />
turn radius)<br />
6. Slow stop at a set deceleration<br />
and a set control gain<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 15<br />
105<br />
255<br />
90<br />
270<br />
75<br />
285<br />
60<br />
300<br />
45<br />
315<br />
30<br />
330<br />
15<br />
345<br />
FEATURED PROJECT
PROJECT<br />
PROCESSOR AND SOFT-<br />
WARE DESIGN<br />
As detailed in the System Design<br />
section, M.A.C.S. uses a single processor<br />
(AMD 64-bit, 2.4 GHz, Dual-<br />
Core). The AMD processor runs<br />
both the high-level and the howlevel<br />
software. The high-level software<br />
is written in Matlab® for rapid<br />
prototyping and to provide an advanced<br />
development environment.<br />
High-level functions include laser<br />
processing, path execution, and<br />
data storage. The low-level software<br />
is written in C++ for speed and low<br />
latency. Low-level functions include<br />
drivers for the laser, gyroscope and<br />
motor controllers, and the heading/<br />
velocity controller software. Figure<br />
7 shows the processor timing overview.<br />
The high-level software runs<br />
in 0.2-s cycles after the completion<br />
of each laser scan.<br />
The low-level software runs in 0.01-s<br />
cycles after the receipt of new gyroscope<br />
measurement data. The<br />
RoboteQ motor controllers update<br />
every 1 ms, but that functions resides<br />
inside the motor controller.<br />
Once M.A.C.S. collects data during<br />
a test run, all data can be played<br />
back both in real-time and fast-time<br />
modes for analysis. This methodology<br />
is also used after software<br />
Laser updates<br />
(High-level on AMD)<br />
Gyro updates<br />
(Low-level on AMD)<br />
Motor updates<br />
(RoboteQ)<br />
Figure 5: Processor timing overview<br />
10 milliseconds<br />
changes have been made to ensure<br />
that the navigation solution continues<br />
to function on all previous data<br />
sets.<br />
INNOVATIVE DESIGN<br />
CONTENT<br />
M.A.C.S. employs several innovative<br />
design features to achieve autonomous<br />
operations for snow removal:<br />
• Fully functional in GPS-challenged<br />
environments through<br />
the use of scanning laser-based<br />
positioning with unique beacon<br />
design<br />
• Fault tolerant laser processing<br />
that operates in the presence<br />
of disturbances caused by<br />
humans or environmental conditions<br />
• Environmentally-friendly, allelectric<br />
technology<br />
• Plug-and-play charging of individual<br />
batteries with error-proof<br />
connections<br />
• Robust traction provided by a<br />
combination of V-profile snow<br />
tires, duallies, weight, fourwheel<br />
drive, acceleration control,<br />
and optimal plow width<br />
• Plowing strategy that avoids<br />
1 millisecond<br />
200 milliseconds<br />
snow build-up during turns by<br />
first backing up and then turning<br />
• Laser cover to shield it from<br />
sunlight with stealth mounts that<br />
do not block or diffract the laser<br />
beam<br />
• Matlab® highly flexible development<br />
environment with TCP/<br />
IP and USB interfacing and WiFi<br />
connectivity, including iPhone<br />
or iPad remote control and<br />
status displays<br />
PRACTICAL APPLICATIONS<br />
M.A.C.S. was designed to remove<br />
snow from sidewalks in dense<br />
urban environments that are likely<br />
GNSS-challenged due to building<br />
blockage, severe multipath and/<br />
or interference. A practical implementation<br />
would either use existing<br />
buildings and objects or laser<br />
reflectors. Only three features with<br />
good geometry relative to the laser<br />
scanner are needed for a redundant<br />
navigation solution. The laser range<br />
is 250 m, which supports a cm-level<br />
accurate navigation solution in most<br />
if not all urban environments.<br />
A second, practical application of<br />
the M.A.C.S. platform is educational<br />
use for research into challenging<br />
guidance, navigation and control<br />
problems. The Matlab® development<br />
environment in combination<br />
with flexible TCPIP and USB interfacing<br />
enables rapid prototyping<br />
and testing of new concepts.<br />
EDITOR’S NOTE<br />
This article was taken from an indepth<br />
conference paper originally<br />
published by the Institute of Navigation<br />
(ION) in September of 2011.<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 16<br />
FEATURED PROJECT
PROJECT<br />
The full paper is available at the<br />
ION website [4].<br />
REFERENCES<br />
[1] The First Annual Autonomous<br />
<strong>Snowplow</strong> Competition Rulebook,<br />
Revision 2011.3.0, available<br />
from: http://www.autosnowplow.<br />
com/Rulebooks.html (accessed on<br />
21 January 2011).<br />
[2] Litter, J. J., “Mobile Robot for<br />
Search and Rescue,” M.S. Thesis,<br />
Mechanical Engineering, Ohio University,<br />
2004.<br />
[3] Bates, D. and F. van Graas,<br />
“GPS-Guided Autonomous Lawnmower<br />
with Scanning Laser Obstacle<br />
Detection,” Proceedings of<br />
the Institute of Navigation GNSS-06<br />
Meeting, Fort Worth, TX, September<br />
2006.<br />
[4] Craig, Samantha, Miltner,<br />
Matthew, Fulk, Derek,<br />
Pelgrum, Wouter, van Graas, Frank,<br />
“<strong>Monocular</strong> Autonmously-<strong>Controlled</strong><br />
<strong>Snowplow</strong>,” Proceedings<br />
Figure 6: <strong>Monocular</strong> <strong>Autonomously</strong>-<strong>Controlled</strong> <strong>Snowplow</strong> Team<br />
of the 24th International Technical<br />
Meeting of Satellite Division of the<br />
Institute of Navigation (ION GNSS<br />
2011), Portland, OR, September<br />
<strong>EEWeb</strong><br />
Electrical Engineering Community<br />
Contact Us For Advertising Opportunities<br />
1.800.574.2791<br />
advertising@eeweb.com<br />
www.eeweb.com/advertising<br />
2011, pp. 2127-. Available for viewing<br />
at: http://ion.org/search/purchase_paper.cfm?jp=p&id=9763<br />
■<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 17<br />
FEATURED PROJECT
FEATURED PRODUCTS<br />
Dual 24-bit ECG Front End IC<br />
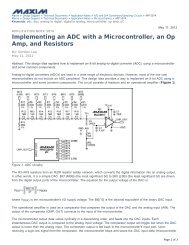
Texas Instruments Incorporated expanded its award-winning<br />
ADS1298 analog front end (AFE) family with five new fully integrated<br />
AFEs for portable biopotential measurement applications. The new<br />
electrocardiogram (ECG) and electroencephalograph (EEG) AFEs<br />
are the first to offer 16- and 24-bit resolution with 1 or 2 channels. The<br />
devices cut power consumption by more than 94 percent compared to<br />
discrete implementations, while shrinking board space requirements up<br />
to 86 percent. These reductions will enable portable medical, sports and<br />
fitness equipment that combines long battery life with a form factor that<br />
is smaller, lighter and easier to wear. For more information, click here.<br />
LF RFID Transponder for Applications<br />
The Atmel ATA5577M1330C-PP is ideal for applications in building<br />
access control systems, industrial automation, consumer and industrial<br />
segments, and as tokens, key fobs or transponders, this new device<br />
offers designers the ability to develop more flexible, high-performance<br />
tag devices. The Atmel ATA5577M1330C-PP enhances the Atmel LF<br />
RFID portfolio with a stand-alone, fully functional tag that includes an<br />
antenna coil trimmed to an operating frequency of 125kHz. The new<br />
device provides the highest flexibility for universal use, which is a key<br />
market requirement. For information, click here.<br />
8-bit Touch Sensor and Controller<br />
Fujitsu Semiconductor Europe (FSEU) announced the addition of<br />
new products with capacitive touch sensor and controller functionality<br />
to its “New 8FX” family of high-performance 8-bit microcontrollers.<br />
The new products from the MB95870, MB95860 and MB95850 series<br />
are being offered as low-cost, low-power microcontroller options for<br />
controlling the capacitive touch keys and touch panels used in a wide<br />
range of products sold worldwide, from household appliances to office<br />
equipment and electronic systems. For more information, click here.<br />
Highest Density Embedded MCU<br />
Atmel Corporation announced sampling of the Atmel SAM4SD32, the<br />
industry’s first 2MB embedded Flash Cortex-M4 processor-based<br />
microcontroller (MCU). Further expanding the company’s ARM®<br />
Cortex-M processor-based portfolio, Atmel’s SAM4SD32 offers best-inclass<br />
low power consumption at 200uA/MHz in active mode—a savings<br />
of over 50 percent vs. the nearest competitor—when running at 120MHz.<br />
For more information, please click here.<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 18<br />
FEATURED PRODUCTS
Transform Your iPhone, iPad<br />
or iPod into an Oscilloscope<br />
with the iMSO-104<br />
Begin Your Experience Now<br />
Experience the iMSO-104 as Joe<br />
Wolin, co-founder of <strong>EEWeb</strong>,<br />
gives you an in-depth look into<br />
the future of oscilloscopes.<br />
ELECTRONICS<br />
ELECTRONICS<br />
UBM UBM<br />
2012<br />
WINNER
TECHNICAL ARTICLE<br />
Today’s embedded developers<br />
look for hardware and software<br />
solutions that enable them to<br />
respond quickly and easily to<br />
customer and market demands,<br />
last-minute design changes and<br />
competitive challenges. Of all the<br />
components in a typical embedded<br />
system, the microcontroller (MCU)<br />
should provide the developer<br />
with the utmost in versatility and<br />
configurability, enabling them to<br />
implement new system features<br />
easily and efficiently through<br />
firmware updates and I/O changes.<br />
Think “Swiss Army knife” etched in<br />
CMOS.<br />
However, with many conventional<br />
MCU architectures, even minor<br />
I/O changes can cause headaches<br />
for developers engaged in printed<br />
circuit board (PCB) design,<br />
especially for cost- and spaceconstrained<br />
embedded systems.<br />
For example, the connectors in the<br />
system might all be on one side<br />
of the enclosure. The problem is,<br />
though, some of the I/Os may need<br />
to be routed to the opposite side of<br />
the MCU by passing underneath<br />
it because the MCU supplier has<br />
defined the pinout in such a way that<br />
the I/O connections for the revised<br />
system cannot all reside on one<br />
side of the IC. The rearrangement<br />
of pins used for a given combination<br />
of I/O functions may force the PCB<br />
layout engineer to move to a higher<br />
number of board layers, thus<br />
increasing the cost and complexity<br />
of the overall system.<br />
An additional design challenge<br />
concerns the MCU package<br />
itself. To reduce cost, some MCU<br />
suppliers may provide versions<br />
of a device that share functions<br />
between pins and thus squeeze the<br />
IC into a smaller, cheaper package.<br />
Register configurations provide the<br />
ability to allocate those I/O pins to<br />
a selection of different peripherals,<br />
but the degree of freedom is usually<br />
limited; the configuration-control<br />
hardware may support only one or<br />
two functions per pin, limiting the<br />
number of options and creating<br />
potential pin conflicts if the MCU<br />
is used in an application that the<br />
vendor did not anticipate. The wide<br />
variety of MCU applications means<br />
this scenario happens frequently.<br />
Drawing on its experience and<br />
expertise with 8-bit mixedsignal<br />
MCUs, Silicon Labs<br />
has implemented a flexible I/O<br />
system into the design of its new<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 20<br />
TECHNICAL ARTICLE
TECHNICAL ARTICLE<br />
ARM® Cortex-M3 core-based<br />
Precision32 MCUs. The key to<br />
the design is a highly configurable<br />
dual-crossbar architecture: a<br />
programmable switching matrix<br />
that enables a developer to route<br />
an input to any one of a number of<br />
output pins.<br />
The Precision32 MCU architecture<br />
defines two crossbars (one for<br />
either side of the IC) that can link<br />
any internal I/O function to a wide<br />
range of pins, as Figure 1 illustrates.<br />
In this example, which uses a TQFP-<br />
80 package, Crossbar 1 connects to<br />
pins 9 through 40, excluding only<br />
28 and 29, which are power and<br />
ground pins. Crossbar 1 supports<br />
14 different internal functions,<br />
including various serial ports,<br />
timers, and comparators; any of<br />
these functions can connect to any<br />
of the external pins that the crossbar<br />
serves. Some of these pins can also<br />
be mapped to A/D converter inputs<br />
or 5V-tolerant outputs.<br />
The crossbar architecture provides<br />
the designer with a number of<br />
benefits. The architecture makes<br />
it possible to arrange the pinout of<br />
the chip to simplify board design,<br />
placing a group of I/O pins as close<br />
as possible to the ICs or connectors<br />
to which they need to be linked.<br />
This approach can often save cost<br />
by allowing the use of a PCB with<br />
fewer routing layers as it avoids<br />
the need to route underneath the<br />
MCU or take many circuit traces<br />
through a congested area of the<br />
PCB. And it can improve signal<br />
integrity as sensitive traces can be<br />
kept as short as possible or routed<br />
close to ground lines. Furthermore,<br />
pinout changes can be made easily<br />
– simply by reprogramming the<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
15<br />
16<br />
17<br />
18<br />
19<br />
20<br />
80<br />
79<br />
78<br />
77<br />
76<br />
75<br />
74<br />
73<br />
72<br />
71<br />
70<br />
69<br />
68<br />
67<br />
66<br />
65<br />
64<br />
63<br />
62<br />
61<br />
21<br />
22<br />
23<br />
24<br />
25<br />
26<br />
27<br />
28<br />
29<br />
30<br />
31<br />
32<br />
33<br />
34<br />
35<br />
36<br />
37<br />
38<br />
39<br />
40<br />
KEY<br />
USART0<br />
PCA0<br />
CMP0<br />
UART0<br />
SSG<br />
RTC<br />
I25<br />
I2C1<br />
CROSSBAR 0<br />
registers that control the crossbar –<br />
to accommodate last-minute board<br />
changes.<br />
Such fine-grained control over I/O<br />
configuration makes it much easier<br />
for designers to use a more costeffective<br />
package, choosing which<br />
functions to connect to pins and<br />
which ones to leave unconnected.<br />
To allow easy migration from other<br />
MCUs, Silicon Labs chose the<br />
ARM Cortex-M3 as the processor<br />
core for the Precision32 family. This<br />
processor core has rapidly become<br />
a de facto standard in 32-bit MCU<br />
architectures thanks to its broad<br />
adoption in the embedded market<br />
by a wide variety of MCU suppliers<br />
and software tool vendors,<br />
providing a high degree of choice<br />
for the embedded developer. It<br />
has widespread support among<br />
software companies in terms of<br />
conventional development tools<br />
such as C and C++ compilers<br />
and real-time operating systems.<br />
Standardization on ARM cores has<br />
now made it easier than ever to<br />
port code from one 32-bit MCU to<br />
another. As a result, the deciding<br />
factor in MCU selection is shifting<br />
from the CPU core architecture to<br />
the peripheral set and th innovative<br />
ways in which MCU vendors<br />
address system-design issues.<br />
A flexible crossbar is easier to<br />
understand than many of the ad<br />
hoc I/O remapping schemes used<br />
by other MCU vendors. To further<br />
improve ease of use, Silicon Labs<br />
provides a complimentary software<br />
tool that simplifies the task of<br />
device configuration. Silicon Labs’<br />
AppBuilder tool offers a graphical<br />
interface that allows designers to<br />
drag-and-drop functions to pins.<br />
Once the configuration is complete,<br />
the tool generates the boot code<br />
required to load this configuration<br />
into the MCU. This tool works with<br />
commercial IDEs including Keil<br />
and IAR as well as the popular<br />
Eclipse development environment,<br />
which Silicon Labs has adopted and<br />
modified to support Precision32<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 21<br />
SPI0<br />
PCA1<br />
CMP1<br />
UART1<br />
USART1<br />
I25<br />
Timer 0<br />
SPI1<br />
CROSSBAR 1<br />
CMP0S<br />
SPI2<br />
I2C0<br />
PB<br />
Peripheral on 2 Xbars<br />
GPIO on crossbar<br />
CMP1S<br />
USART1<br />
UART1<br />
6-ch PCA<br />
I250<br />
Timer 1<br />
SPI2<br />
SPI1<br />
UART0<br />
LPTimer<br />
GPIO off crossbar<br />
Power / GND<br />
Test and Regulator<br />
60<br />
59<br />
58<br />
57<br />
56<br />
55<br />
54<br />
53<br />
52<br />
51<br />
50<br />
49<br />
48<br />
47<br />
46<br />
45<br />
44<br />
43<br />
42<br />
41<br />
Figure 1: Precision32<br />
MCU Dual-Crossbar<br />
Architecture<br />
TECHNICAL ARTICLE
TECHNICAL ARTICLE<br />
Figure 2: Precision32 AppBuilder Tool<br />
products.<br />
The AppBuilder tool (see Figure 2)<br />
goes further: enabling developers<br />
to quickly and graphically choose<br />
peripheral mix, select peripheral<br />
properties, set up clocking modes<br />
and customize pin-out, all without<br />
reading the data sheet. The IDE<br />
support also goes further in terms<br />
of MCU support by providing<br />
direct support for all members of<br />
the Precision32 MCU family. The<br />
Precision32 dashboard provides<br />
the latest documentation, code<br />
examples and software all in one<br />
place, removing the need to hunt<br />
down register locations and driver<br />
source code in data sheets and<br />
applications notes.<br />
Support for peripherals is augmented<br />
by the inclusion of Cortex<br />
Microcontroller Software Interface<br />
Standard (CMSIS) compliant<br />
code. CMSIS provides an interface<br />
for common peripherals that enables<br />
peripheral driver re-use and<br />
simple porting from other ARM-<br />
based MCUs. On<br />
top of this, Silicon<br />
Labs has implementedmiddleware<br />
designed<br />
to make writing<br />
code for multitasking<br />
and data<br />
transfers simple.<br />
This provides important<br />
support<br />
for complex systems<br />
that need,<br />
for example, USB<br />
support. There<br />
are many configuration<br />
options and<br />
usage models for<br />
USB. Silicon Labs<br />
has used its longstanding<br />
experience with USB to<br />
provide a rich suite of middleware<br />
functions that ease the job of implementation.<br />
Given the number<br />
of applications that now demand<br />
USB support, from sports watches<br />
to data loggers, engineers need to<br />
get up to speed on USB as quickly<br />
as possible, and this library makes<br />
it possible. For example, to create<br />
USB-to-UART transfers, developers<br />
simply specify properties such<br />
as USB transfer type, data size,<br />
and synchronous or asynchronous<br />
UART operation.<br />
The library provides a number<br />
of USB class drivers, including<br />
audio, human-interface device,<br />
mass storage and device firmware<br />
update (DFU) libraries for easy<br />
development.<br />
In common with the strategy of<br />
providing a 32-bit MCU family<br />
that supports the cost-, time- and<br />
space-constrained demands of<br />
today’s systems, the USB hardware<br />
itself was designed for maximum<br />
utility with the minimum number<br />
of external support components.<br />
Many on-chip USB controllers are<br />
not feature complete, demanding<br />
components such as external clock<br />
generators. The USB controller<br />
on the Precision32 MCU family<br />
devices has its own integrated<br />
precision oscillator, using a novel<br />
clock-recovery technique to<br />
achieve 0.25 percent accuracy<br />
without an external crystal. The rest<br />
of the MCU can use this oscillator<br />
or a separate one – allowing greater<br />
flexibility over clocking regimes in<br />
low-power modes – that is either<br />
fed by a low-cost 32 kHz crystal or<br />
can run in open-loop mode. This<br />
novel approach enables members<br />
of the Precision32 MCU family to<br />
operate without the need for a costly<br />
external crystal.<br />
Similarly, the internal voltage<br />
regulator of a Precision32 MCU<br />
eliminates the need for an external<br />
regulator. The MCU can operate<br />
directly from a 5V supply, allowing<br />
it to be powered directly from USB<br />
or a separate unregulated source.<br />
This regulator can also drive an<br />
output rail at a programmable<br />
output voltage, enabling the MCU<br />
to provide power to additional ICs<br />
while still avoiding the need for an<br />
external regulator. Alternatively, this<br />
output can act as a constant current<br />
source to drive the backlight on an<br />
LED display.<br />
Similar care has been taken in the<br />
implementation of other analog<br />
and digital peripherals. The A/D<br />
converter, for example, provides<br />
12-bit resolution. In addition, all of<br />
the Precision32 analog peripherals<br />
are tested and specified across<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 22<br />
TECHNICAL ARTICLE
TECHNICAL ARTICLE<br />
temperature and voltage. Many<br />
alternative 32-bit MCU vendors do<br />
not test their analog peripherals in<br />
production, which can lead to field<br />
defects. If the analog circuits do not<br />
work or are degraded below 2.4V, the<br />
MCUs become impractical for AA/<br />
AAA alkaline battery applications.<br />
The Precision32 analog peripherals<br />
are so reliable they often can be<br />
used to replace standalone analog<br />
components.<br />
Configurability extends to the analog<br />
peripherals, making it possible to<br />
optimize performance for many<br />
different applications using the<br />
same devices. The MCUs have two<br />
ADCs with multiple modes including<br />
interleaving mode to achieve up to<br />
2 MSPS. To reduce I/O overhead<br />
for the processor core, the ADCs<br />
support a programmable auto scan<br />
system that cycles through ADC<br />
channels and read the input data on<br />
each. Burst mode support makes<br />
it possible to automatically sample<br />
and average up to 64 samples.<br />
The analog comparators have<br />
four different modes including a<br />
low-power mode (400 nA) and<br />
high-performance mode (150 ns<br />
response time) as well as an internal<br />
6-bit DAC to provide 64 levels of<br />
Precision32 MCU<br />
350 nA sleep w/ RTC<br />
Rad Hard and SEE Hard 12A Synchronous Buck<br />
Regulator with Multi-Phase Current Sharing<br />
ISL70002SEH<br />
The ISL70002SEH is a radiation hardened and SEE hardened<br />
high efficiency monolithic synchronous buck regulator with<br />
integrated MOSFETs. This single chip power solution operates<br />
over an input voltage range of 3V to 5.5V and provides a tightly<br />
regulated output voltage that is externally adjustable from 0.8V<br />
to ~85% of the input voltage. Output load current capacity is<br />
12A for T J ≤ +150°C. Two ISL70002SEH devices configured to<br />
current share can provide 19A total output current, assuming<br />
±27% worst-case current share accuracy.<br />
The ISL70002SEH utilizes peak current-mode control with<br />
integrated error amp compensation and pin selectable slope<br />
compensation. Switching frequency is also pin selectable to<br />
either 1MHz or 500kHz. Two ISL70002SEH devices can be<br />
synchronized 180° out-of-phase to reduce input RMS ripple<br />
current.<br />
High integration makes the ISL70002SEH an ideal choice to<br />
power small form factor applications. Two devices can be<br />
synchronized to provide a complete power solution for large<br />
scale digital ICs, like field programmable gate arrays (FPGAs),<br />
that require separate core and I/O voltages.<br />
Applications<br />
• FPGA, CPLD, DSP, CPU Core and I/O Voltages<br />
• Low-Voltage, High-Density Distributed Power Systems<br />
EFFICIENCY (%)<br />
90<br />
85<br />
80<br />
75<br />
70<br />
0 1 2 3 4 5 6 7 8 9<br />
LOAD CURRENT (A)<br />
FIGURE 1. EFFICIENCY 5V INPUT TO 2.5V OUTPUT, T A = +25°C<br />
April 5, 2012<br />
FN8264.1<br />
10 11 12<br />
Features<br />
• DLA SMD#5962-12202<br />
• 12A Output Current for a Single Device (at TJ = +150°C)<br />
• 19A Output Current for Two Paralleled Devices<br />
• 1MHz or 500kHz Switching Frequency<br />
• 3V to 5.5V Supply Voltage Range<br />
• ±1% Ref. Voltage (Line, Load, Temp. & Rad.)<br />
• Pre-Biased Load Compatible<br />
• Redundancy/Junction Isolation: Exceptional SET Performance<br />
• Excellent Transient Response<br />
• High Efficiency > 90%<br />
• Two ISL70002SEH Synchronization, Inverted-Phase<br />
• Comparator Input for Enable and Power-Good<br />
• Adjustable Analog Soft-Start<br />
• Input Undervoltage, Output Undervoltage and Adjustable<br />
Output Overcurrent Protection<br />
• QML Qualified per MIL-PRF-38535<br />
• Full Mil-Temp Range Operation (-55°C to +125°C)<br />
• Radiation Environment<br />
- High Dose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100 krad(Si)<br />
- ELDRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100 krad(Si)*<br />
*Level guaranteed by characterization; “EH” version is<br />
production tested to 50 krad(Si).<br />
• SEE Hardness<br />
- SEL and SEB LETTH . . . . . . . . . . . . . . . . . . 86.4MeV/mg/cm2 - SEFI LETTH . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43MeV/mg/cm2 - SET LETTH . . . . . . . . . . . . . . . . . . . . . . . . . . 86.4MeV/mg/cm2 AMPLITUDE (V)<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
Get the Datasheet and Order Samples<br />
http://www.intersil.com<br />
CH1 MASTER LX + 20V<br />
CH2 SLAVE LX + 15V<br />
CH3 VOUT x 10<br />
CH4 SYNC<br />
-6 -4 -2 0 2 4 6 8 10 12 14<br />
TIME (µs)<br />
FIGURE 2. 2-PHASE SET PERFORMANCE at 86.4MeV/mg/cm 2<br />
Intersil (and design) is a registered trademark of Intersil Americas Inc. Copyright Intersil Americas Inc. 2012<br />
All Rights Reserved. All other trademarks mentioned are the property of their respective owners.
State Machine<br />
Heretic<br />
TECHNICAL ARTICLE<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
13<br />
14<br />
15<br />
Like many of you, it’s been drilled into me<br />
by the Reuse Methodology Manual to write<br />
my state machines in VHDL as a pair of<br />
processes: a combinatorial process to compute<br />
the next state from the inputs and current state,<br />
and a sequential process to update the current<br />
state with the next state.<br />
Here’s a simple example of that format: a state machine<br />
that simply increments the counter state variable<br />
whenever the enable input is asserted:<br />
comb: process(cnt_r, en_i)<br />
begin<br />
if en_i = ‘1’ then<br />
cnt_x
TECHNICAL ARTICLE<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
Because cnt_x has no explicit assignment if the enable<br />
is not asserted, the synthesizer will make it into a latch.<br />
That’s usually not what you want, especially in your<br />
supposedly combinatorial process. To avoid latches, I<br />
usually put a default assignment for each state variable<br />
right at the top of the combinatorial process:<br />
The default assignment keeps the counter at its current<br />
value. This will be overridden in the code that follows<br />
if the enable is asserted. Either way, the state variable<br />
always has an explicit assignment and an inferred latch<br />
is avoided.<br />
Too much code:<br />
Two processes, twice as many signals, long sensitivity<br />
lists and default assignments all serve to increase the<br />
amount of code you have to write, debug, maintain and<br />
document. And more code means that less of the total<br />
design fits on the monitor screen, which makes it harder<br />
to “load the design into your head” and increases your<br />
chances of making an error.<br />
Because of the “code bloat” problem, lately I’ve been<br />
writing my state machines as a single process:<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
bad comb: process(cnt_r, en_i)<br />
begin<br />
if en_i = ‘1’ then<br />
cnt_x
TECHNICAL ARTICLE<br />
Figure 1<br />
A<br />
do_it<br />
done_it B<br />
clk<br />
do_it<br />
done_it<br />
clk<br />
B to perform the operation repeatedly, it would have to<br />
go through a multiple-cycle handshake to initiate each<br />
operation, rather than just being able to assert and hold<br />
the request signal.<br />
A two-process state machine offers a better solution in this<br />
case. The combinatorial process of A could immediately<br />
respond to B’s done_it signal and lower the do_it signal<br />
before the next clock edge. A could also keep the do_it<br />
signal continuously asserted if it wanted B to do multiple<br />
operations.<br />
In the end, which type of state machine should be used?<br />
I find myself using one-process state machines where I<br />
can, and the two-process type where I need more control<br />
to achieve performance. I know that doesn’t hew to the<br />
guidelines espoused in the RMM, but I’m an engineer so<br />
I’ll take the liberty to use my own judgment and leave the<br />
cookbook approaches to the robots.<br />
[Aside: If you want to see an even more heretical way<br />
to code state machines, check out the inferred state<br />
machines Martin Thompson talks about in his blog. ]<br />
About the Author<br />
1 2 3 4 5<br />
David E. Vandenbout earned a B.S.E.E. degree from<br />
North Carolina State University (NCSU) in 1978 and an<br />
M.S.E.E. from M.I.T. in 1979. He worked as a Member<br />
of Technical Staff at Bell Telephone Laboratories from<br />
1978-1983 until they suggested he explore other career<br />
clk<br />
Figure 2<br />
opportunities. He completed his Ph.D. at NCSU in<br />
1987 and worked there as an Assistant Professor doing<br />
research in the areas of neural networks, statistical<br />
physics, computer tomography, and FPGA-based rapidprototyping.<br />
After publishing over 45 journal articles,<br />
conference papers and book chapters, he left in 1993<br />
due to an allergic reaction to the passive voice. In 1990,<br />
he was one of the founders of X Engineering Software<br />
Systems Corp. (XESS), a company that originally<br />
developed software for X11-based scientific workstations<br />
until they found out nobody actually wanted to pay<br />
any money for that. He re-directed XESS so that it now<br />
develops and sells low-cost, open-source, FPGA-based<br />
hardware. XESS has developed and delivered boards to<br />
thousands of individuals and hundreds of corporations<br />
and universities in almost every country in the world (still<br />
waiting on Antarctica). XESS FPGA boards have been<br />
used in everything from classroom instruction to digital<br />
video processing to cracking the cryptographic codes of<br />
the SpeedPass system. ■<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 27<br />
A<br />
comb<br />
clk<br />
do_it<br />
done_it<br />
clk<br />
A<br />
comb<br />
do_it<br />
done_it<br />
1 2 3 4 5<br />
B<br />
clk<br />
TECHNICAL ARTICLE
BeStar®<br />
ACOUSTICS & SENSORS<br />
PRODUCTS<br />
Speakers<br />
Buzzers<br />
Piezo Elements<br />
Back-up Alarms<br />
Horns<br />
Sirens/Bells<br />
Beacons<br />
Microphones<br />
Sensors<br />
INDUSTRIES<br />
Automotive<br />
Durables<br />
Medical<br />
Industrial<br />
Mobile<br />
Fire / Safety<br />
Security<br />
Consumer<br />
Leisure<br />
Teamwork • Technology • Invention • Listen • Hear<br />
Preferred acoustic component<br />
supplier to OEMs worldwide<br />
bestartech.com | sales@bestartech.com | 520.439.9204<br />
QS9000 • TS/ISO16949 • ISO14001 • ISO13485 • ISO9001<br />
<strong>EEWeb</strong><br />
Electrical Engineering Community<br />
Join Today<br />
www.eeweb.com/register
RETURN TO ZERO<br />
<strong>EEWeb</strong><br />
Electrical Engineering Community<br />
Join Today<br />
www.eeweb.com/register<br />
<strong>EEWeb</strong> | Electrical Engineering Community Visit www.eeweb.com 29<br />
RETURN TO ZERO