GPS-Halter Lenkerbasis Nonshock für YAMAHA FJR 1300 ... - Navisys
GPS-Halter Lenkerbasis Nonshock für YAMAHA FJR 1300 ... - Navisys
GPS-Halter Lenkerbasis Nonshock für YAMAHA FJR 1300 ... - Navisys

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
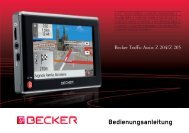
Schritt<br />
Step 1<br />
5<br />
5<br />
4<br />
Schritt<br />
Step 3<br />
3<br />
4<br />
Lenker / Handle Bar<br />
Schritt<br />
Step 2<br />
6<br />
Original Schrauben verwenden.<br />
Use original screws.<br />
6<br />
1<br />
Original Teil<br />
Original Part<br />
2<br />
Original Teil<br />
Original Part<br />
7<br />
7<br />
6<br />
Fahrtrichtung<br />
Driving direction<br />
6<br />
INFORMATION<br />
< Standard AMPS-Lochmuster*<br />
(horizontal)<br />
Standard AMPS Horizontal Pattern*<br />
<strong>für</strong> / for: TomTom Rider II, Garmin Zumo,<br />
Bags-Connection <strong>GPS</strong> / PDA Bags<br />
Ø 5,5 mm, L: 38 mm, h: 30 mm<br />
< Standard AMPS-Lochmuster*<br />
(vertikal)<br />
Standard AMPS Vertical Pattern*<br />
<strong>für</strong> / for: TomTom Rider II, Garmin Zumo,<br />
Bags-Connection <strong>GPS</strong> / PDA Bags<br />
Ø 5 mm, L: 30 mm, h: 38 mm<br />
< TomTom Rider I<br />
Ø 3,5 mm, L: 35 mm, h: 30 mm<br />
< Garmin Street Pilot 2610 – 2720<br />
(RAM)<br />
Ø 5 mm, L: 48,4 mm<br />
< Garmin Quest Serie (RAM)<br />
Garmin Quest Series (RAM)<br />
Ø 5 mm, L: 48,4 mm<br />
< Garmin E-Trex Serie (RAM)<br />
Garmin E-Trex Series (RAM)<br />
Ø 5 mm, L: 48,4 mm<br />
* Das universelle AMPS-Lochmuster ist kompatibel mit den meisten <strong>GPS</strong>-Systemen und Gerätehaltern.<br />
* Universal AMPS hole pattern is compatible with the most devices or device holders.<br />
Schritt<br />
Step 4<br />
8<br />
<strong>GPS</strong>.06.497.10000/B<br />
9<br />
1<br />
9<br />
Fahrtrichtung<br />
Driving Direction<br />
8